Изобретение относится к области малой, децентрализованной электроэнергетики и может быть использовано для электроснабжения объектов с автономными электростанциями, например, объектов морской инфраструктуры, сельского и лесного хозяйств, горнорудной промышленности, береговых рыбоперерабатывающих предприятий и др.
Известен способ автоматического регулирования давления наддувочного воздуха судового двухтактного главного двигателя (ГД), в камеры сгорания которого подача наддувочного воздуха производится за счет высокооборотного (десятки тысяч оборотов в минуту) турбокомпрессора наддува (ТКН), оборудованного двумя воздушными подшипниками и смешанным соосным приводом от газовой турбины, приводимой во вращение отработавшими газами двигателя, и встроенной в турбокомпрессор обратимой синхронной электромашины (ОСЭМ) мощностью 100 кВт с постоянными магнитами, охлаждаемой потоком воздуха турбокомпрессора и подсоединенной электрически к электрической сети посредством статического обратимого полупроводникового преобразователя и автоматического выключателя, состоящий в том, что при работе ГД в статических режимах с малыми нагрузками обратимая синхронная электромашина, встроенная в ТКН, работает в режиме электродвигателя и заменяет вспомогательную воздуходувку, а в статических режимах средней и полной нагрузки ГД эта же электромашина работает генератором, подпитывая электрическую сеть судна. (Циплёнкин Г.Е., Иовлев В.И. Улучшение топливной экономичности двигателя за счет оптимизации систем наддува // Двигателестроение. 2014. №2. С. 16-22). Данный способ применяется с 2011 года в судовых главных двигателях японской фирмы «Mitsubishi».
Преимущество данного способа регулирования давления наддувочного воздуха заключается в том, что мощность, затрачиваемая на создание требуемого давления наддува электроприводным ТКН в режиме малых нагрузок меньше, чем у вспомогательной воздуходувки, при меньших размерах и массе встроенной обратимой синхронной электромашины, у которой отсутствует вентиляционная крылатка, обмотка возбуждения, щеточно-кольцевой аппарат, возбудитель и подвозбудитель, что существенно повышает ее надежность, снижает потери на возбуждение, а следовательно, повышает коэффициент полезного действия (КПД) данной электромашины, а также уменьшает массу и инерционность ротора, а следовательно, повышает быстродействие ТКН в целом. Благодаря использованию у высокооборотного ТКН воздушных подшипников полностью упраздняется его система жидкостной смазки, что также повышает надежность наддувочного агрегата, снижает эксплуатационные расходы и многократно повышает его ресурс. Помимо этого, в режимах средней и полной нагрузок ГД данный способ повышает КПД самого главного двигателя на 3-5% за счет утилизации части энергии теплоты его отработавших газов в этом диапазоне нагрузок в электрическую энергию посредством перевода ОСЭМ турбокомпрессора в генераторный режим.
Недостаток этого известного способа заключается в том, что он применим только к статическим режимам главного двигателя, переходные механические процессы которого отличаются сравнительно невысокими повторяемостью и быстродействием, и для которых проблема управления ТКН в динамических режимах не стоит так остро, а потому в данном известном способе не решается.
Наиболее близким и известным к заявляемому является способ, реализованный в патенте РФ №2488708 «Способ автоматизированного управления синхронным дизель-генератором», в котором осуществляется адаптивное автоматическое регулирование давления наддувочного воздуха синхронного дизель-генератора, снабженного одноимпульсным механогидравлическим центробежным регулятором топливоподачи (известным как регулятор угловой скорости) с встроенными в него электрическим серводвигателем, трехимпульсным электронным пропорционально-интегрально-дифференциальным (ПИД) регулятором подачи топлива и наддувочного воздуха, пусковоздушной системой запуска, подсистемой дистанционного автоматизированного управления синхронным дизельгенератором, турбоэлектронаддувочным агрегатом (ТЭНА) умеренной (по документации до 10-20⋅103 мин-1) быстроходности в составе утилизационной газовой турбины и турбокомпрессора наддува (ТКН), бустерной обратимой синхронной электрической машины (БОСЭМ) с типовой системой электромагнитного возбуждения от полупроводникового выпрямителя-возбудителя, соединенной кинематически соосно с валом турбокомпрессора наддува, как общепринято через редуктор и соединительную муфту, а электрически - с электрической сетью посредством статического полупроводникового преобразователя (СПП) с его системой управления, состоящий в том, что при запуске синхронного дизель-генератора разгоняют одновременно и турбоэлектронаддувочный агрегат посредством данной бустерной обратимой синхронной электрической машины. При работе данного синхронного дизель-генератора в статических режимах и внезапных изменениях его нагрузки измеряют посредством трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха сигналы статического и динамического приращения дополнительной мощности либо, наоборот, ее снижения. Согласованно и синхронно регулируют этими сигналами подачу топлива и давление наддувочного воздуха дизеля путем того, что воздействуют статическим сигналом изменения на серводвигатель его одноимпульсного механогидравлического центробежного регулятора угловой скорости, а динамическим - на электромагнитный момент бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата посредством ее системы электромагнитного возбуждения и системы управления статическим полупроводниковым преобразователем бустерной обратимой синхронной электрической машины, работающей в диапазоне статических нагрузок синхронного ДГ менее 30-40% номинальной приводным электродвигателем при номинальном токе возбуждения, а в диапазоне статических нагрузок синхронного ДГ свыше 30-40% работающей в генераторном режиме при токе возбуждения, регулируемом системой электромагнитного возбуждения в функции текущей мощности основного синхронного ДГ.
Преимущество данного известного способа автоматизированного регулирования давления наддувочного воздуха синхронного дизель-генератора заключается в том, что присутствие БОСЭМ на валу турбокомпрессора наддува - ТЭНА с комбинированным приводом - сообщает системе наддува синхронного ДГ активные свойства, способствующие тому, что в период запуска синхронного ДГ, в период регулирования его рабочих параметров в статических режимах, а также при внезапных изменениях нагрузки во всем диапазоне его статических режимов осуществляют адаптивное регулирование к текущим условиям рабочих параметров наддувочного воздуха, создаваемого ТКН, за счет его бустерного электропривода - БОСЭМ, так что процесс сгорания топлива в цилиндрах синхронного ДГ протекает при оптимальных для текущих условий его работы значениях давления и коэффициента избытка воздуха, обеспечивающих полноту сгорания (окисления) паров углеводородов при улучшенных экологических характеристиках его выхлопных газов и экономичности. Другим преимуществом способа-прототипа является утилизация энергии теплоты отработавших газов в электрическую энергию в диапазоне стационарных нагрузок синхронного ДГ более 30-40% номинальной и дополнительно кинетической энергии, запасаемой вращающимися массами ТЭНА при часто повторяющихся внезапных сбросах его нагрузки и остановках, что дополнительно повышает КПД турбоэлектронаддувочного агрегата и синхронного дизель-генератора в целом. Следующим преимуществом способа-прототипа является снижение пожароопасности и трудоемкости обслуживания синхронного ДГ и его ТЭНА вследствие улучшения полноты сгорания топлива и уменьшения отложений сажи, способной к самовозгоранию, в камерах сгорания двигателя, лопатках газовой турбины ТЭНА и выхлопном тракте. А в период защиты синхронного ДГ от «разноса», вызывающего необходимость прекращения подачи воздуха путем перекрытия воздушной заслонкой, встроенной во входную полость ткрбокомпрессора наддува, торможение ТКН посредством БОСЭМ и его быстрая остановка повышают надежность всего турбоэлектронадцувочного агрегата, так как защищают его турбокомпрессор от попадания в режим помпажа.
К недостаткам этого известного способа автоматизированного регулирования давления наддувочного воздуха синхронного дизель-генератора следует отнести все еще неудовлетворительную приемистость синхронного ДГ в переходных режимах, обусловленную завышенной инерционностью ТЭНА из-за увеличения массы его вращающихся частей, вызванной использованием редуктора и соединительной муфты у сравнительно тихоходной бустерной ОСЭМ с типовым электромагнитным возбуждением, содержащей к тому же на роторе в бесщеточном исполнении обмотку возбуждения, возбудитель, вращающийся выпрямитель, подвозбудитель, и снижение, как следствие, быстродействия ТЭНА в переходных режимах. Другой причиной инерционности БОСЭМ в переходных режимах является то, что управляющими сигналами, нацеленными на изменение ее электромагнитного момента в периоды ее работы в генераторном режиме, воздействуют на изменение в БОСЭМ тока в обмотке возбуждения, отличающейся, как известно, значительной инерционностью. В результате отмеченных недостатков при внезапных набросах и сбросах нагрузки на синхронный ДГ полностью устранить запаздывание изменений давления наддувочного воздуха в цилиндрах дизеля по отношению к изменениям подачи топлива и обеспечить оптимальное регулирование коэффициента избытка воздуха в этих переходных режимах, а следовательно, достаточно улучшить качество вырабатываемой электроэнергии, не удается. Теми же причинами - электромагнитным способом возбуждения БОСЭМ и присутствием редуктора, - а также наличием у сравнительно небыстроходного ТЭНА подшипников с жидкостной смазкой объясняется понижение его надежности, ресурса и срока службы, равно как и повышение трудоемкости обслуживания и других эксплуатационных расходов. Предложенная в способе-прототипе технология быстрой остановки турбонаддувочного агрегата за счет его электрического торможения посредством бустерной ОСЭМ в период нормальной и аварийной остановок синхронного дизель-генератора, когда падает давление в системе жидкостной смазки подшипников, чревата возникновением в этот момент в металле рабочих колес агрегата опасных перенапряжений, обусловленных резким перепадом температур. Помимо этого общим недостатком обоих известных аналогов является невозможность синхронизированного с запуском дизеля включения и разгона его турбоэлектронаддувочного агрегата посредством БОСЭМ, если электрическая сеть объекта, например, судна, не будет находиться под напряжением, следствием чего запуск этого дизеля с первой попытки не будет гарантирован.
Технической задачей, на решение которой направлено заявляемое изобретение, является устранение перечисленных эксплуатационных недостатков известного способа-прототипа, а именно: а) повышение надежности ТЭНА с комбинированным турбоэлектрическим приводом, его ресурса до первого ремонта и срока службы; б) дальнейшее улучшение приемистости синхронного ДГ в переходных режимах с целью улучшения динамических показателей процесса регулирования частоты напряжения в электрической сети потребителей, т.е. качества электроэнергии; в) снижение трудоемкости обслуживания ТЭНА и его эксплуатационных расходов; г) обеспечение возможности синхронизированного с запуском дизель-генера-тора включения и разгона его турбокомпрессора наддува, снабженного комбинированным турбоэлектрическим приводом, даже при отсутствии напряжения в электросети объекта; д) исключение опасности возникновения температурных перенапряжений рабочих колес ТЭНА в периоды нормальных и аварийных остановок синхронного ДГ, не вызывающих помпажа его турбокомпрессора наддува.
Поставленная техническая задача достигается тем, что в известном способе адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, заключающегося в том, что при запуске синхронного дизель-генератора посредством его пусковоздушной системы по сигналам его подсистемы дистанционного автоматизированного управления разгоняют одновременно и его турбоэлектронаддувочный агрегат, содержащий утилизационную газовую турбину и турбокомпрессор наддува, посредством бустерной обратимой синхронной электрической машины, соединенной электрически с шинами главного распределительного щита посредством автоматического выключателя и статического полупроводникового преобразователя данной бустерной обратимой синхронной электрической машины, включаемой в режим приводного электродвигателя посредством ее статического полупроводникового преобразователя, при номинальном токе возбуждения, а после завершения процесса запуска синхронного дизель-гененратора нагружают его типовым способом статической активной мощностью. В рабочем режиме с увеличением статической нагрузки на включенном синхронном дизель-генераторе по мере ее приема и соответственно непрерывном возрастании вращающего момента, развиваемого утилизационной газовой турбиной турбокомпрессора наддува, электромагнитный двигательный момент бустерной обратимой синхронной электрической машины, работающей приводным электродвигателем, адекватно снижают путем уменьшения напряжения статического полупроводникового преобразователя по сигналу, формируемому трехимпульсным электронным пропорционально-интегрально-дифференциальным регулятором подачи топлива и наддувчного воздуха. При этом в период работы данного синхронного дизель-генератора в статических режимах и возрастании его нагрузки измеряют посредством данного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха сигнал статического приращения этой мощности, воздействуют этим статическим сигналом приращения как на увеличение подачи топлива посредством серводвигателя одноимпульсного механогидравлического центробежного регулятора угловой скорости, так и давления наддувочного воздуха первичного двигателя синхронного генератора посредством бустерной обратимой синхронной электрической машины и системы управления ее статическим полупроводниковым преобразователем, снижая при этом напряжение на клеммах бустерной обратимой синхронной электрической машины, ее якорный ток и электромагнитный двигательный момент обратно пропорционально возрастающей статической нагрузке синхронного дизель-генератора. Причем одновременно с возрастанием вращающего момента, развиваемого утилизационной турбиной турбокомпрессора наддува, контролируют посредством датчика холостого хода и направления мощности бустерной обратимой синхронной электрической машины момент ее перехода в режим холостого хода, соответствующий возросшей нагрузке синхронного дизель-генератора до значения, равного 35% номинальной, воздействуют нулевым сигналом данного датчика холостого хода и направления мощности на систему управления статическим полупроводниковым преобразователем, обращая бустерную обратимую синхронную электрическую машину в данный момент в генераторный режим холостого хода, которая, управляя данной машиной и ее режимами, осуществляет программные изменения знака электромагнитного момента на валу машины. Затем в период работы синхронного дизель-генератора со статической активной нагрузкой более 35% номинальной увеличивают тормозной электромагнитный момент бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата, переведенной в генераторный режим, посредством системы управления полупроводниковым преобразователем-возбудителем, утилизируя все возрастающий избыток энергии теплоты отработавших газов синхронного дизель-генератора в электрическую энергию и направляя ее в электрическую сеть по цепи питания. При работе синхронного дизель-генератора в диапазоне статических активных нагрузок выше 35% номинальной и набросе мощности измеряют посредством трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха сигналы статического и динамического приращения этой мощности, согласованно и синхронно увеличивают этими сигналами подачу топлива и давление наддувочного воздуха путем того, что статическим сигналом приращения воздействуют на серводвигатель одноимпульсного механогидравлического центробежного регулятора угловой скорости и увеличивают подачу топлива, а динамическим - на систему управления статическим полупроводниковым преобразователем бустерной обратимой синхронной электрической машины, чем понижают на этом этапе переходного процесса якорный ток и тормозной электромагнитный момент обратимой синхронной электрической машины, работающей генератором, а при сбросе мощности в этом же диапазоне статических нагрузок синхронного дизель-генератора подачу топлива изложенным путем и теми же средствами понижают, а давление наддува синхронного дизель-генератора одновременно и согласованно теми же средствами дефорсируют путем увеличения на этом этапе переходного процесса якорного тока и электромагнитного тормозного момента бустерной обратимой синхронной электрической машины, в отличие от него, бустерную обратимую синхронную электрическую машину заявляемого высокооборотного - свыше 50⋅103 мин-1 -турбоэлектронаддувочного агрегата, выполненного с воздушными подшипниками без жидкостной смазки, возбуждают постоянными магнитами, расположенными на полюсах ротора данной бустерной обратимой синхронной электрической машины, а магнитный поток в ее воздушном зазоре независимо от текущего генераторного или электродвигательного режимов поддерживают неизменным и равным номинальному значению. Саму бустерную обратимую синхронную электрическую машину, которую выполняют встроенной в приемную полость турбокомпрессора наддува на его валу, охлаждают потоком всасываемого воздуха данного турбокомпрессора. А вышеназванным статическим полупроводниковым преобразователем, состоящим из двух одинаковых обратимых полупроводниковых преобразователей, а именно электромашинного и сетевого, и содержащим звено постоянного тока, управляют посредством его системы управления, состоящей из независимых подсистем управления указанными обратимыми соответственно электромашинным и сетевым полупроводниковыми преобразователями, при этом командные сигналы и напряжения управления в процессе регулирования параметров наддувочного воздуха на данные независимые подсистемы управления обратимыми соответственно электромашинным и сетевым полупроводниковыми преобразователями формируют посредством блока логического управления бустерной обратимой синхронной электрической машиной, в состав которого входят сумматор входных управляющих сигналов, субблоки соответственно пуска, задания режимов, управления двигательным, управления генераторным режимами и субблок торможения, причем синхронизирующие напряжения при работе всех данных подсистем управления подают на их синхронизирующие входы посредством соответствующих трансформаторов и датчика положения ротора бустерной обратимой синхронной электрической машины. При этом упомянутые выше программные изменения знака электромагнитного момента на валу бустерной обратимой синхронной электрической машины, управляющие ее режимами, и саму корректировку значения последнего по абсолютной величине в процессе осуществления регулирования давления наддувочного воздуха синхронного дизель-генератора, связанного с изменением его текущих статических и динамических нагрузочных режимов, производят по цепям данных подсистем управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины путем воздействия на углы управления их полупроводниковых приборов по сигналам трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха, взаимодействующего согласованно и синхронно с указанным блоком логического управления бустерной обратимой синхронной электрической машиной турбоэлектронаддувочного агрегата. В период работы синхронного дизель-генератора в диапазоне статических активных нагрузок выше 35% номинальной и набросе мощности, наряду с воздействием на увеличение подачи топлива, посредством вышеназванного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора, статическим сигналом приращения через серводвигатель одноимпульсного механогидравлического центробежного регулятора угловой скорости, динамическим сигналом соответствующего увеличения мощности от данного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора воздействуют на блок логического управления бустерной обратимой синхронной электрической машиной турбоэлектронаддувочного агрегата и, посредством реверсивных сигналов, посылаемых его субблоком задания режимов на субблоки управления соответственно двигательным и генераторным режимами, воздействуют последними на подсистемы управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического полупроводникового преобразователя, переключая бустерную обратимую синхронную электрическую машину, работающую генератором, на первом этапе этого переходного процесса из генераторного в двигательный номинальный режим и, соответственно, с последующим ее возвратом в предшествующий генераторный режим и дальнейшим увеличением ее якорного тока и тормозного электромагнитного момента на втором этапе данного переходного процесса по сигналам обратной связи пропорционально возросшей статической нагрузке синхронного дизель-генератора. В период работы синхронного дизель-генератора в статическом режиме в этом же диапазоне нагрузок и сбросе части его нагрузки, наряду с воздействием, посредством трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора, статическим сигналом изменения на уменьшение подачи топлива синхронного дизель-генератора, динамическим сигналом соответствующего уменьшения мощности, формируемым этим же регулятором и посылаемым на блок логического управления бустерной обратимой синхронной электрической машиной, воздействуют на субблок задания режимов этого блока логического управления, блокируя переключение бустерной обратимой синхронной электрической машины из генераторного в двигательный режим, причем тем же динамическим сигналом, направляемым через сумматор блока логического управления на субблок управления генераторным режимом данной электрической машины, воздействуют на подсистемы управления соответственно электромашинным и сетевым обратимыми полупроводниковыми преобразователями бустерной обратимой синхронной электрической машины, увеличивая скачком ее генерирующую мощность для повышения на первом этапе переходного процесса эффективности притормаживания турбоэлектронаддувочного агрегата посредством данной бустерной обратимой синхронной электрической машины, работающей в генераторном режиме, с целью более быстрого снижения параметров наддувочного воздуха, при этом измеряют ток нагрузки в цепи постоянного тока статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины посредством встроенного в нее шунта, сравнивают, посредством субблока торможения, сигнал измеренного значения тока с программно-заданным в нем номинальным значением, и, если измеренное значение сигнала окажется меньше заданного, включают по сигналу данного субблока торможения в цепь постоянного тока статического полупроводникового преобразователя, параллельно его обратимым сетевому и электромашинному полупроводниковым преобразователям, резистор динамического торможения, который отключают тем же субблоком торможения с началом второго этапа переходного процесса, при котором с его началом возвращают бустерную обратимую синхронную электрическую машину в предшествующий генераторный режим субблоком управления генраторным режимом по сигналу обратной связи от датчика давления воздуха в воздушном коллекторе турбоэлектронаддувочного агрегата с последующим уменьшением в данном режиме тока и электромагнитного тормозного момента бустерной обратимой синхронной электрической машины на втором этапе таким же путем, как изложено выше при набросе нагрузки. А в период нормальных и аварийных остановок синхронного дизель-генератора, не вызывающих помпажа его образованного турбоэлектрокомпрессора наддува, процедуру принудительной остановки последнего методом электрического торможения, посредством бустерной обратимой синхронной электрического машины, блокируют, сохраняя ее для случая защиты первичного двигателя от предельной частоты вращения - «разноса».
В частном случае, при вводе резервного синхронного дизель-генератора в действие при обесточенной электрической сети разгон бустерной обратимой синхронной электрической машины его турбоэлектронаддувочного агрегата, синхронизированный с запуском первично го двигателя и гарантирующий переход последнего на топливо с первой попытки его впрыска, осуществляют в ее режиме приводного синхронного электродвигателя с частотным управлением посредством резервного пуско-зарядного устройства, состоящего из независимой стартерной аккумуляторной батареи, автономного независимого обратимого полупроводникового инвертора, независимого согласующего трансформатора, подсистемы управления данным инвертором, трансформатора синхронизации, вспомогаптельного контактора и датчика напряжения данной аккумуляторной батареи, при котором посылают пусковой сигнал с выхода подсистемы дистанционного автоматизированного управления резервным синхронным дизель-генератором на вход субблока пуска блока логического управления, на другом входе которого наличествует нулевой сигнал датчика напряжения электросети об отсутствии напряжения на ее шинах данной электрической сети, а с выхода данного субблока пуска, дублируя команду на пуск бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата, направляют этот пусковой сигнал на вход подсистемы управления названным автономным независимым обратимым полупроводниковым инвертором, по команде которой, посредством этого инвертора, производят программное преобразование напряжения постоянного тока на клеммах данной аккумуляторной батареи в напряжение переменного тока нарастающей частоты с программно заданной в указанной подсистеме управления автономным независимым обратимым полупроводниковым инвертором скоростью, повышают это напряжение посредством упомянутого независимого согласующего трансформатора и подают его на клеммы бустерной обратимой синхронной электрической машины, запуская и разгоняя ее по мере нарастания частоты ƒвых выходного напряжения ~U1вых независимого обратимого полупроводникового инвертора, чем повышают и его действующее значение напряжение ~U2вых на клеммах бустерной обратимой синхронной электрической машины, согласно закону частотного регулирования для механизма с вентиляторной нагрузкой, по соотношению:
 ,
,
где U2вых и ƒ - переменное выходное напряжение и его частота на клеммах бустерной обратимой синхронной электрической машины.
Тем самым производят частотный разгон бустерной обратимой электрической машины турбоэлектронаддувочного агрегата в режиме приводного синхронного электродвигателя, а заодно и его турбоэлектрокомпрессора, которые конструктивно исполнены на одном валу. При этом одновременно разгоняют и первичный двигатель резервного синхронного дизель-генератора, посредством его пуско-воздушной системы, по сигналу, приходящему в данный момент на ее вход с выхода подсистемы дистанционного автоматизированного управления (не показано) с контролем при этом разгона первичного двигателя и его турбоэлектронаддувочного агрегата соответствующими датчиками частоты вращения, по сигналам которых осуществляют подачу с выхода блока впрыска топлива сигнал «Впрыск топлива» на вход пуско-воздушной системы первичного двигателя резервного синхронного дизель-генератора, запуская его в данном частном случае. Причем по завершении данного запуска резервного синхронного дизель-генератора и после его подключения к электрической сети, по сигналу о восстановлении напряжения, формируемому датчиком напряжения электрической сети, осуществляют дальнейшую работу бустерной обратимой синхронной электрической машины в режиме приводного вентильного электродвигателя посредством ввода в действие субблоком пуска блока логическогоуправления и статическим полупроводниковым преобразователем данной машины, а синхронно с включением данного статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины переводят автономный независимый обратимый полупроводниковый инвертор резервного пуско-зарядного устройства, посредством его подсистемы управления и контактов вспомогательного контактора, по сигналу датчика напряжения независимой стартерной аккумуляторной батареи в выпрямительный режим для автоматической подзарядки этой батареи.
В частном случае, электромашинный и сетевой обратимые полупроводниковые преобразователи выполняют на силовых транзисторах типа IGBT.
В частном случае, автономный независимый обратимый полупроводниковый инвертор резервного пуско-зарядного устройства бустерной обратимой синхронной электрической машины выполняют на силовых транзисторах типа IGBT.
Ограничительные и отличительные признаки заявляемого изобретения обеспечивают в совокупности для синхронного дизель-генератора (ДГ) решение поставленной задачи с получением следующих результатов: 1) повышение надежности турбоэлектронаддувочного агрегата (ТЭНА), снабженного комбинированным турбоэлектрическим приводом, его ресурса до первого ремонта, срока службы и коэффициента полезного действия (КПД); 2) дальнейшее улучшение приемистости синхронного ДГ в переходных режимах с целью улучшения динамических показателей процесса регулирования частоты напряжения в электрической сети потребителей, т.е. качества электроэнергии; 3) снижение трудоемкости обслуживания ТЭНА и его эксплуатационных расходов; 4) обеспечение возможности включения и разгона турбоэлектроприводного компрессора наддува, совмещаемых с запуском синхронного ДГ, даже при отсутствии напряжения в электросети объекта, и повышение за счет этого гарантии запуска резервного синхронного ДГ с первой попытки, а следовательно, сокращение продолжительности режима блэкаута.
I. В способе-прототипе автоматизированного управления синхронным дизель-генерато-ром электрический привод ТЭНА умеренной быстроходности (10-20⋅103 мин-1) осуществляют посредством БОСЭМ с электромагнитным возбуждением в бесщеточном исполнении, а его подшипники снабжены жидкостной системой смазки. Благодаря последней ресурс до первого ремонта ТЭНА сравнительно невелик, а эксплуатационные расходы на ее содержание весьма заметны. В то же время наличие на роторе бесщеточной БОСЭМ ее обмотки возбуждения, якорной обмотки электромашинного возбудителя с вращающимся выпрямителем, постоянных магнитов электромашинного подвозбудителя и крылатки самовентиляции, с одной стороны, усложняют конструкцию БОСЭМ и ТЭНА в целом, снижая их надежность, и требуют затрат энергии на возбуждение, смазку и охлаждение этой электромашины. Потери энергии на трение в подшипниках, на возбуждение и охлаждение снижают, в конечном счете, КПД ТЭНА. С другой стороны, эти конструктивные особенности БОСЭМ увеличивают ее массу и размеры, а следовательно, и инерционность ТЭНА в переходных процессах. Дополнительно к этому, принудительное электрическое торможение и остановки ТЭНА в период нормальных и аварийных остановок первичного двигателя синхронного ДГ, обусловленное падением давления в системе жидкостной смазки ТЭНА после остановки навешенного масляного насоса, создавая перенапряжения в металле лопаток рабочих колес и корпуса ТЭНА из-за резкого перепада температур, также снижают его надежность.
В заявляемом способе адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, согласно совокупности признаков - «… бустерную обратимую синхронную электрическую машину заявленного высокооборотного турбоэлектронаддувочного агрегата, выполненного с воздушными подшипниками без жидкостной смазки, возбуждают постоянными магнитами, расположенными на полюсах ротора данной бустерной обратимой синхронной электрической машины. А магнитный поток в ее воздушном зазоре независимо от текущего генераторного или электродвигательного режима поддерживают неизменным и равным номинальному значению. Саму бустерную обратимую синхронную электрическую машину, встроенную в приемную полость турбокомпрессора наддува на его валу (т.е. с образованием турбоэлектрокомпрессора) (и без вентиляционной крылатки, она ее не имеет), охлаждают потоком всасывемого воздуха данного турбокомпрессора …» - следует, что 1) благодаря высокооборотному до 50⋅103 мин-1 и выше исполнению ТЭНА (см. Микротурбины Capstone [Электронный ресурс]: bpcenergy.ru>imgcompany/bpcener-gy/doc/Capstone_broshure5.pdf.) между вращающимися обоймами его подшипников образуется при быстром вращении, за счет возрастающего под обоймами подшипников давления, изолирующая воздушная прослойка по всей их окружности, резко понижающая коэффициент трения и исключающая необходимость применения жидкостной системы охлаждения и смазки. Вследствие упрощения конструкции подшипниковых узлов и исключения системы их жидкостной смазки существенно повышается надежность, увеличивается ресурс ТЭНА, снижаются его первоначальная стоимость и эксплуатационные затраты, включающие расход энергии на смазку, уход, ремонт и замену подшипников (С.А. Лицкевич. Оценка надежности микротурбинных генераторов при использовании их на береговых объектах морского транспорта // Наука и транспорт. Морской и речной транспорт. - №2, 2012. - С. 66-68); 2) благодаря отказу от электромагнитного способа возбуждения у БОСЭМ через электромашинные подвозбудитель и возбудитель, вращающийся выпрямитель, а также через систему регулирования напряжения и замене этого способа на возбуждение от постоянных магнитов, получают существенное упрощение конструкции и повышение надежности самой БОСЭМ, а вместе с этим добиваются снижения ее первоначальной стоимости и эксплуатационных расходов на возбуждение и обслуживание; 3) благодаря тому, что упрощенную конструктивно малогабаритную БОСЭМ встраивают в приемную полость быстроходного турбокомпрессора на оконечности его вала, т.е. рассчитывают на ту же частоту вращения, что и сам турбокомпрессор, и располагают ее в потоке холодного всасываемого воздуха этого турбокомпрессора, становится возможным существенно уменьшить размеры и массу высокооборотного БОСЭМ, избежать применения согласующей зубчатой передачи и соединительной муфты между ними, а также упразднить на роторе БОСЭМ собственную вентиляционную крылатку, что, во-первых, позволяет исполнить турбоэлектронаддувочный агрегат в целом более простым, компактным, надежным и с меньшей стоимостью, а, во-вторых, снизить дополнительные потери на охлаждение БОСЭМ.
Далее, согласно совокупности признаков - «… А в период нормальных и аварийных остановок синхронного дизель-генератора, не вызывающих помпажа турбокомпрессора наддува, процедуру принудительной остановки последнего методом электрического торможения посредством бустерной обратимой синхронной электрической машины блокируют, сохраняя ее для случая защиты первичного двигателя от предельной частоты вращения - «разноса», - следует, что в режимах нормальных и нештатных (аварийных) остановок синхронного ДГ, выполняемых прекращением подачи топлива и не вызывающих необходимости прекращения подачи воздуха, опасного возникновением помпажа турбокомпрессора наддува, технологию принудительного электрического торможения БОСЭМ не используют, предоставляя быстроходному ТЭНА возможность остановиться в режиме свободного выбега, поскольку наличие воздушных подшипников у последнего допускает такой режим и без работы навешенного масляного насоса на первичном двигателе. В режиме свободного выбега нагретые до сотен градусов рабочие колеса ТЭНА охлаждаются плавно-замедленно, без резкого перепада температур, за счет конвективного обмена с набегающим при вращении ротора потоком холодного воздуха.
Следовательно, благодаря тому, что у высокооборотного ТЭНА используют воздушные подшипники, а у его БОСЭМ - постоянные магниты на роторе, а также вследствие расположения самой БОСЭМ в приемной полости турбокомпрессора и исключения режимов принудительного электрического торможения ТЭНА в периоды остановок синхронного ДГ, добиваются повышения надежности этого ТЭНА в целом, увеличения его ресурса до первого ремонта и срока службы.
II. Использование в способе-прототипе автоматизированного управления дизель-генера-тором комбинированного турбоэлектрического привода у его компрессора наддува существенно улучшает приемистость первичного двигателя генератора в переходных режимах, благодаря созданию лучших условий сгорания топлива. В то же время степень этого улучшения следует признать еще недостаточной, вследствие того, что:
а) использование БОСЭМ с электромагнитным возбуждением увеличивает массу и размеры этой машины, добавляет турбоэлектронаддувочному агрегату дополнительную инерционность и сохраняет по этой причине, хотя и в меньшей степени, запаздывание регулирования давления наддувочного воздуха в камерах сгорания первичного двигателя при внезапных набросах и сбросах его нагрузки по отношению к изменению подачи топлива;
б) известная доля запаздывания создается и тем, что в динамических режимах работы синхронного ДГ воздействие сигналами изменений его нагрузки на электромагнитный момент БОСЭМ в периоды ее работы в генераторном режиме производят по цепи электромагнитного возбуждения, переходные процессы в которой, как известно, также характеризуются значительной инерционностью и запаздыванием.
В заявляемом способе адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, из следующей совокупности признаков «… бустерную обратимую синхронную электрическую машину заявляемого высокооборотного турбоэлектронаддувочного агрегата … возбуждают постоянными магнитами, расположенными на полюсах ротора данной БОСЭМ …» и «… а магнитный поток в ее воздушном зазоре независимо от текущего генераторного или электродвигательного режима поддерживают неизменным и равным номинальному значению, …» очевидно следует, что ротор БОСЭМ с постоянными магнитами на его полюсах, лишенный обмотки возбуждения самой этой машины, якорной обмотки ее возбудителя, вращающегося выпрямителя и постоянных магнитов подвозбудителя, обладает меньшей массой, размерами и инерционностью, а следовательно, и меньшим запаздыванием. А благодаря другой совокупности признаков -: «… а упомянутые выше программные изменения знака (т.е. реверсирование) электромагнитного момента на валу бустерной обратимой синхронной электрической машины, управляющие ее режимами, и саму корректировку значения последнего по абсолютной величине в процессе осуществления регулирования давления наддувочного воздуха синхронного дизель-генератора, связанного с изменением его текущих статических и динамических нагрузочных режимов, производят по цепям данных подсистем управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического преобразователя бустерной обратимой синхронной электрической машины путем воздействия на углы управления их полупроводниковых приборов по сигналам трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха, взаимодействующего согласованно и синхронно с указанным блоком логического управления бустерной обратимой синхронной электрической машиной турбоэлектронаддувочного агрегата …» - устраняется запаздывание, обусловленное инерционностью процессов изменения магнитного поля в обмотке возбуждения, так как известно, что переходные процессы в цепях полупроводниковых преобразователей относятся к классу безинерционных. Также и следующая совокупность признаков - «… в период работы синхронного дизель-генератора в диапазоне статических активных нагрузок выше 35% номинальной и набросе мощности, наряду с воздействием на увеличение подачи топлива, посредством вышеназванного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора, статическим сигналом приращения через серводвигатель одноимпулъсного механогидравлического центробежного регулятора угловой скорости, динамическим сигналом соответствующего увеличения мощности данного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора воздействуют на блок логического управления бустерной обратимой синхронной электрической машиной трбоэлектронаддувочного агрегата, и, посредством реверсивных сигналов, посылаемых его субблоком задания режимов на субблоки управления соответственно двигательным и генераторным режимами, воздействуют последними на подсистемы управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического полупроводникового преобразователя, чем переключают бустерную обратимую синхронную электрическую машину, работающую генератором, на первом этапе этого переходного процесса из генераторного в двигательный номинальный режим, и соответственно с последующим ее возвратом в предшествующий генераторный режим и дальнейшим увеличением ее якорного тока и тормозного электромагнитного момента на втором этапе данного переходного процесса по сигналам обратной связи пропорционально возросшей статической нагрузке синхронного дизель-генератора …» - направлен на устранение запаздывания изменения давления наддувочного воздуха дизеля при набросе нагрузки путем быстрых и энергичных двухэтапных программных воздействий на электромагнитный момент БОСЭМ турбоэлектронаддувочного агрегата и адекватного изменения производительности его компрессора. Также и другая совокупность признаков - «… в период работы синхронного дизель-генератора в статическом режиме в этом же диапазоне нагрузок и сбросе части его нагрузки, наряду с воздействием, посредством трехимпульсного электронного пропорционально-интегрально-дифференци-ального регулятора, статическим сигналом изменения на уменьшение подачи топлива синхронного дизель-генератора, динамическим сигналом соответствующего уменьшения мощности, формируемым этим же регулятором и посылаемым на блок логического управления бустерной обратимой синхронной электрической машиной, воздействуют на субблок задания режимов этого блока логического управления, блокируя переключение бустерной обратимой синхронной электрической машины из генераторного в двигательный режим, причем тем же динамическим сигналом, направляемым через сумматор блока логического управления на субблок управления генераторным режимом данной электрической машины, воздействуют на подсистемы управления соответственно электромашинным и сетевым обратимыми полупроводниковыми преобразователями бустерной обратимой синхронной электрической машины, увеличивая скачком ее генерирующую мощность для повышения на первом этапе переходного процесса эффективности притормаживания турбоэлектронаддувочного агрегата посредством данной бустерной обратимой синхронной электрической машины, работающей в генераторном режиме, с целью более быстрого снижения параметров наддувочного воздуха, при этом измеряют ток нагрузки в цепи постоянного тока статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины посредством встроенного в нее шунта, сравнивают, посредством субблока торможения, сигнал измеренного значения тока с программно-заданным в нем номинальным значением, и, если измеренное значение сигнала окажется меньше заданного, включают по сигналу данного субблока торможения в цепь постоянного тока статического полупроводникового преобразователя, параллельно его обратимым сетевому и электромашинному полупроводниковым преобразователям, резистор динамического торможения, который отключают тем же субблоком торможения с началом второго этапа переходного процесса, при котором с его началом возвращают бустерную обратимую синхронную электрическую машину в предшествующий генераторный режим субблоком управления генераторным режимом по сигналу обратной связи от датчика давления воздуха в воздушном коллекторе турбоэлектронаддувочного агрегата с последующим уменьшением в данном режиме тока и электромагнитного тормозного момента бустерной обратимой синхронной электрической машины на втором этапе таким же путем, как изложено выше при набросе нагрузки. …» - направлен на погашение инерционности вращающихся частей ТЭНА в период снижения их частоты вращения за счет тех же быстрых и энергичных двухэтапных программных воздействий на электромагнитный момент БОСЭМ с целью повышения эффективности электрического торможения им ТЭНА, за счет ее переключения в режим комбинированного - генераторно-динамического - торможения.
Следовательно, благодаря тому, что а) у БОСЭМ с постоянными магнитами на роторе меньше масса, размеры и инерционность этого ротора, б) ее электромагнитный момент регулируют только по цепям управления безинерционными обратимыми сетевым и электромашинным полупроводниковыми преобразователями, в) активно воздействуют в переходных режимах программными средствами на электромагнитный момент БОСЭМ и г) в определенных случаях используют режим динамического торможения БОСЭМ, достигается дальнейшее улучшение приемистости синхронного ДГ при внезапных изменениях его нагрузки, а следовательно, и качество электроэнергии в электрической сети потребителей.
III. Использование в способе-прототипе автоматизированного управления синхронным ДГ умеренного по быстроходности (10-20⋅103 мин-1) турбоэлектироприводного компрессора наддува, содержащего жидкостную систему смазки у его подшипников и у БОСЭМ, а также и электромагнитное возбуждение у последней от бесщеточной системы, содержащей обмотку возбуждения на магнитных полюсах ротора, электромашинный возбудитель с вращающимся выпрямителем, подвозбудитель и автоматический регулятор напряжения на статоре, вызывает, в итоге, дополнительные эксплуатационные расходы, связанные, во-первых, с затратами энергии на смазку подшипников, возбуждение и самовентиляцию БОСЭМ, а во-вторых, - с их периодическим техническим обслуживанием, обусловленным пониженным ресурсом и сроком службы.
В заявляемом способе адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, из совокупности его признаков - «...бустерную обратимую синхронную электрическую машину заявленного высокооборотного турбоэлектронаддувочного агрегата, выполненного с воздушными подшипниками без жидкостной смазки, возбуждают постоянными магнитами, расположенными на полюсах ротора данной бустерной обратимой синхронной электрической машины. А магнитный поток в ее воздушном зазоре независимо от текущего генераторного или электродвигательного режима поддерживают неизменным и равным номинальному значению. Саму бустерную обратимую синхронную электрическую машину, встроенную в приемную полость турбокомпрессора наддува на его валу, охлаждают потоком всасываемого воздуха турбокомпрессора …» - очевидно следует, что жидкостная система смазки у ТЭНА, как и собственная крылатка самовентиляции у БОСЭМ отсутствуют, благодаря применению воздушных подшипников и расположению БОСЭМ в приемной полости турбокомпрессора, а электромагнитная система возбуждения БОСЭМ заменена на возбуждение от постоянных магнитов, расположенных на роторе.
Следовательно, благодаря тому, что у БОСЭМ турбоэлектронаддувочного агрегата на роторе отсутствуют обмотка возбуждения на магнитных полюсах, якорная обмотка электромашинного возбудителя с вращающимся выпрямителем, подвозбудитель и автоматический регулятор напряжения на статоре, а у высокооборотного, до 50⋅103 мин-1 и выше, ТЭНА система жидкостной смазки заменена на воздушную «смазку», и что встроенную в приемную полость БОСЭМ охлаждают всасываемым воздухом турбокомпрессора, достигается снижение эксплуатационных расходов ТЭНА синхронного дизель-генератора и трудоемкости его технического обслуживания. Существенно то, что вследствие отсутствия на высокооборотном ТЭНА синхронного дизель-генератора, содержащем БОСЭМ на постоянных магнитах, указанных вспомогательных систем, снижается также и его первоначальная стоимость по сравнению с прототипом.
IV. В способе-прототипе автоматизированного управления синхронным ДГ включение в работу и первоначальный разгон его ТЭНА, выполняемые посредством БОСЭМ одновременно с запуском его первичного двигателя, возможны только при условии, что электрическая сеть объекта энергоснабжения, как это и распространено в отраслях техники, находится под напряжением. В противном случае разогнать ТЭНА одновременно с запуском первичного двигателя еще до начала впрыска топлива в камеры сгорания последнего не представляется возможным, и поэтому несоответствие коэффициента избытка воздуха в этот ответственный момент запуска первичного двигателя может привести к тому, что последний с первой попытки не запустится.
В частном решении заявляемого способа адаптивного регулирования давления наддувочного воздуха дизель-генератора, из совокупности его признаков - «… при вводе резервного синхронного дизель-генератора в действие при обесточенной электрической сети разгон бустерной обратимой синхронной электрической машины его турбоэлектронаддувочного агрегата, синхронизированный с запуском первичного двигателя и гарантирующий переход последнего на топливо с первой попытки его впрыска, осуществляют в ее режиме приводного синхронного электродвигателя с частотным управлением посредством резервного пуско-зарядного устройства, состоящего из независимой стартерной аккумуляторной батареи, автономного независимого обратимого полупроводникового инвертора, независимого согласующего трансформатора, подсистемы управления данным инвертором, трансформатора синхронизации, вспомогаптельного контактора и датчика напряжения данной аккумуляторной батареи, при котором посылают пусковой сигнал с выхода подсистемы дистанционного автоматизированного управления резервным синхронным дизель-генератором на вход субблока пуска блока логического управления, на другом входе которого наличествует нулевой сигнал датчика напряжения электросети об отсутствии напряжения на ее шинах, а с выхода данного субблока пуска, дублируя команду на пуск бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата, направляют этот пусковой сигнал на вход подсистемы управления названным автономным независимым обратимым полупроводниковым инвертором, по команде которой, посредством этого инвертора, производят программное преобразование напряжения постоянного тока на клеммах данной аккумуляторной батареи в напряжение переменного тока нарастающей частоты с программно заданной в указанной подсистеме управления автономным независимым обратимым полупроводниковым инвертором скоростью, повышают это напряжение посредством упомянутого независимого согласующего трансформатора и подают его на клеммы бустерной обратимой синхронной электрической машины, запуская и разгоняя ее по мере нарастания частоты ƒвых выходного напряжения ~U1вых независимого обратимого полупроводникового инвертора, чем повышают и его действующее значение напряжение ~U2вых на клеммах бустерной обратимой синхронной электрической машины, согласно закону частотного регулирования для механизма с вентиляторной нагрузкой, по соотношению:
 ,
,
где U2выx и ƒ - переменное выходное напряжение и его частота на клеммах бустерной обратимой синхронной электрической машины.
Тем самым производят частотный разгон бустерной обратимой электрической машины турбоэлектронаддувочного агрегата в режиме приводного синхронного электродвигателя, а заодно и его турбоэлектрокомпрессора, которые конструктивно исполнены на одном валу. При этом одновременно разгоняют и первичный двигатель резервного синхронного дизель-генератора, посредством его пуско-воздушной системы, по сигналу, приходящему в данный момент на ее вход с выхода подсистемы дистанционного автоматизированного управления (не показано) с контролем при этом разгона первичного двигателя и его турбоэлектронаддувочного агрегата соответствующими датчиками частоты вращения, по сигналам которых осуществляют подачу с выхода блока впрыска топлива сигнал «Впрыск топлива» на вход пуско-воздушной системы первичного двигателя резервного синхронного дизель-генератора, запуская его в данном частном случае. Причем по завершении данного запуска резервного синхронного дизель-генератора и после его подключения к электрической сети, по сигналу о восстановлении напряжения, формируемому датчиком напряжения электрической сети, осуществляют дальнейшую работу бустерной обратимой синхронной электрической машины в режиме приводного вентильного электродвигателя посредством ввода в действие субблоком пуска блока логическогоуправления и статическим полупроводниковым преобразователем данной машины, а синхронно с включением данного статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины переводят автономный независимый обратимый полупроводниковый инвертор резервного пуско-зарядного устройства, посредством его подсистемы управления и контактов вспомогательного контактора, по сигналу датчика напряжения независимой стартерной аккумуляторной батареи в выпрямительный режим для автоматической подзарядки этой батареи. …» - следует, что, если ввод в действие резервного синхронного ДГ выполняют по причине и в период блэкаута в электрической сети, то синхронизированное с запуском первичного двигателя включение и разгон его ТЭНА посредством БОСЭМ производят, используя накопленную энергию независимой стартерной аккумуляторной батареи, так что к моменту впрыска первых порций топлива в камеры сгорания первичного двигателя коэффициент избытка наддувочного воздуха в них будет соответствовать оптимальному значению, гарантирующему надежное воспламенение паров горючей смеси с первой попытки и их устойчивое полное сгорание без образования сажи и вредных продуктов в отработавших газах.
Следовательно, благодаря тому, что в период блэкаута электрической сети первичный разгон ТЭНА посредством БОСЭМ одновременно с запуском первичного двигателя резервного синхронного ДГ производят за счет резервного пуско-зарядного устройства и энергии его независимой стартерной аккумуляторной батареи, достигают гарантированного запуска резервного синхронного ДГ с первой попытки и, в частности, при отсутствии напряжения в электрической сети объекта, что так важно для обеспечения его бесперебойного электроснабжения.
Таким образом достигается поставленная техническая задача.
Заявляемый способ адаптивного автоматического регулирования давления наддувочного воздуха ДГ иллюстрируется следующими графическими материалами. Фиг. 1 демонстрирует функциональную схему систем регулирования подачи топлива и адаптивного регулирования давления наддувочного воздуха дизель-генератора; фиг. 2 - функциональные схемы статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины и блока логического управления ими; фиг. 3 - временные диаграммы переходных процессов включения, разгона и нагружения дизель-генератора и его турбоэлектронаддувочного агрегата от сетевого источника питания; фиг. 4 - то же от резервного пуско-зарядного устройства; фиг. 5 - временные диаграммы переходных процессов дизель-генератора, нагруженного более чем на 35% номинальной мощности, и его турбоэлектрокомпрессора наддува при внезапном набросе активной нагрузки; фиг. 6 -временные диаграммы переходных процессов дизель-генератора, нагруженного более чем на 35% номинальной мощности, и его турбоэлектрокомпрессора наддува при внезапном сбросе активной нагрузки; фиг. 7 - временные диаграммы переходных процессов дизель-генератора и его турбоэлектрокомпрессора наддува при выводе из параллельной работы; фиг. 8 - временные диаграммы переходных процессов дизель-генератора и его турбоэлектрокомпрессора наддува при защите от «разноса»; фиг. 9 (на двух листах: фиг. 9.а и фиг. 9.б) - таблицу наименований позиций, показанных на фигурах.
Способ адаптивного автоматического регулирования давления наддувочного воздуха ДГ осуществляют посредством следующей системы
Реализующая заявляемый способ система адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, состоящего, в частности, из синхронного генератора 1 (фиг. 1), приводимого во вращение первичным двигателем (дизелем) 2 и подключенного к шинам 3 главного распределительного щита - ГРЩ (не показан) посредством автоматического выключателя 4 (QF1), содержит одноимпульсный механогидравлический центробежный регулятор 5 угловой скорости (МЦРУС) с встроенными в него серводвигателем 6, топливной рейкой 7 и потенциометром 8; турбоэлектронаддувочный агрегат в составе турбокомпрессора 9 наддувочного воздуха и утилизационной газовой турбины 10, приводимой во вращение энергией теплоты отработавших газов первичного двигателя (дизеля) 2. Причем с валом 11 турбокомпрессора 9 сочленен кинематически и соосно вал бустерной обратимой электрической машины 12, в частности, синхронной, встроенной в приемную полость (не показано) турбокомпрессора 9, образуя турбокоэлектромпрессор, и соединенной электрически с шинами 3 ГРЩ посредством автоматического выключателя 13 (QF2) и статического полупроводникового преобразователя (СПП) 14, содержащего звено постоянного тока. Данный СПП состоит из двух одинаковых обратимых полупроводниковых преобразователей: электромашинного 15 (UZ1) и сетевого 16 (UZ2), выполненных, в частности, на силовых транзисторах типа IGBT, каждый из которых снабжен независимой подсистемой управления 17 (ПСУ 1) и 18 (ПСУ2) соответственно, образующих в совокупности систему управления СПП 14. Бустерная обратимая синхронная электрическая машина (БОСЭМ) 12 снабжена для ее возбуждения вместо обмотки возбуждения постоянными магнитами 19, расположенными концентрически на поверхности неявнополюсного ротора 20, при этом магнитный поток самой БОСЭМ в ее воздушном зазоре (не показан) поддерживают в период работы неизменным и равным номинальному значению независимо от текущего генераторного или электродвигательного режима. В одном корпусе с СПП 14 размещено также резервное пуско-зарядное устройство 21 бустерной обратимой синхронной электрической машины 12, необходимое в частном случае заявляемого способа, содержащее независимую стартерную аккумуляторную батарею 22, подключенную через автономный независимый обратимый полупроводниковый инвертор 23 (UZ3), выполненный также на силовых транзисторах типа IGBT, и через независимый согласующий трансформатор 24 к клеммам бустерной обратимой синхронной электрической машины 12. Для управления независимым обратимым полупроводниковым инвертором 23 служит подсистема 25 управления (ПСУ3), выход «1» которой подключен к базовым цепям (не показано) силовых транзисторов (не показано), а вход «3» - к выходу датчика 26 напряжения независимой стартерной аккумуляторной батареи 22.
Командные сигналы и напряжения управления для подсистем 17, 18 и в частном случае 25 управления соответственно электромашинным 15, сетевым 16 полупроводниковыми преобразователями и в данном частном случае независимым обратимым полупроводниковым инвертором 23 формируют посредством блока 27 логического управления статическим полупроводниковым преобразователем 14 бустерной обратимой синхронной электрической машины 12 и датчиком 28 напряжения на шинах 3 ГРЩ, выходы «1» и «2» которого в данном частном случае соединены соответственно с входом «4» подсистемы 25 управления независимым обратимым полупроводниковым инвертором 23 и входом «v» блока 27 логического управления.
В состав блока логического управления 27 бустерной обратимой синхронной электрической машиной 12 входят следующие функциональные узлы (фиг. 1 и фиг. 2): сумматор 29 (Q входных управляющих сигналов, субблоки: пуска 30 (СБП), задания режима 31 (СБЗР), управления двигательным режимом 32 (СБУД), управления генераторным режимом 33 (СБУГ) и торможения 34 (СБТ). Синхронизирующие напряжения, необходимые для работы подсистем 17, 18 и 25 управления, подаются на их синхронизирующие входы «1» посредством синхронизирующих трансформаторов соответственно 35, 36 и 37.
Блок 27 логического управления, как и одноимпульсный механогидравлический центробежный регулятор 5 угловой скорости, функционируют по сигналам, формируемым информационным блоком (не показан), состоящим из:
1) трехимпульсного электронного пропорционально-интегрально-дифференциального (ПИД) регулятора 38 подачи топлива и наддувочного воздуха, соединенного своим выходом «dP/dt» с первым входом сумматора 29 (С) и входом «5» субблока 31 задания режима бустерной обратимой синхронной электрической машины 12, выходом «ΔР» - с входом серводвигателя 6 одноимпульсного механогидравлического центробежного регулятора 5 угловой скорости, а выходом «Р» - с входами «6» субблоков 32 и 33 управления двигательным и генераторным режимами бустерной обратимой синхронной электрической машины 12, входом «6» субблока задания режима 31 и входом «5» подсистемы 39 дистанционного автоматизированного управления (ДАУ) синхронным дизель-генератором 1-2;
2) потенциометра 8 того же одноимпульсного МЦРУС 5, соединенного со вторым входом сумматора 29 (С);
3) датчика 40 обратной связи по давлению наддувочного воздуха в воздушном коллекторе (не показан), соединенного своим выходом с входом «1» субблока 31 задания режима, а также с входами «1» субблоков управления двигательным 32 и генераторным 33 режимами БОСЭМ 12;
4) датчика 41 обратной связи по частоте вращения турбоэлектрокомпрессора 9 наддува, соединенного своим выходом с входом «1» блока 42 впрыска топлива (БВТ), входами «2» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12, входами «1» и «2» соответственно субблоков 30 пуска и 31 задания режима БОСЭМ 12, а также с входом «2» субблока 34 торможения той же БОСЭМ 12;
5) датчика 43 обратной связи по частоте вращения синхронного дизель-генератора 1-2, соединенного своим выходом с входом «2» блока 42 (БВТ) впрыска топлива и входом «2» подсистемы 25 (ПСУ3) управления автономным независимым обратимым полупроводниковым инвертором 23 резервного пуско-зарядного устройства 21 в частном случае заявляемого способа;
6) датчика 44 холостого хода (он же датчик направления мощности) бустерной обратимой синхронной электрической машины 12, соединенного своими выходом с входом «3» субблока 31 задания режима блока 27 логического управления БОСЭМ 12.
Подсистема 39 дистанционного автоматизированного управления синхронным дизель-гененратором 1-2 соединена своими входами «1» с датчиками (не показаны), расположенными на первичном двигателе 2, а выходами «1, 2, 3, 4» - соответственно с его исполнительными органами (не показаны), входом «1» пуско-воздушной системы 45 первичного двигателя 2 и входами «1» и «2» соответственно субблоков 34 торможения и 30 пуска блока 27 логического управления БОСЭМ 12. Выходы «1, 2, 3, 4» блока торможения 34 соединены соответственно с тормозными входами «2» подсистем 17 и 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями, первым (не показан) входом автоматического выключателя 13 и катушкой (не показана) вспомогательного контактора динамического торможения (не показан), замыкающий контакт 46 которого установлен в цепи резистора 47 динамического торможения, входящего в состав статического полупроводникового преобразователя 14 и соединенного параллельно клеммам (не показаны) обратимых сетевого 16 и электромашинного 15 полупроводниковых преобразователей СПП 14. Выходы «1» и «2» субблока 30 пуска блока 27 логического управления БОСЭМ 12 соединены соответственно с пусковыми входами «3» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12, выход «5» соединен со вторым (не показан) входом автоматического выключателя 13, установленного в цепи питания БОСЭМ 12, выход «3» субблока 30 пуска соединен со входом «4» субблока 31 задания режима, а в частном случае (при запуске на обесточенную сеть) выход «4» субблока 30 используют для соединения со входом «5» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23 резервного пуско-зарядного устройства 21, а входы «3» и «4» самой подсистемы 25 управления связаны (как изложено) с выходами соответственно датчика 26 напряжения независимой стартерной аккумуляторной батареи 22 и датчика 28 напряжения на шинах 3 ГРЩ. Выход сумматора 29 (в обычном общем случае) подключен параллельно к управляющим входам «4» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12, а в данном частном случае используют для подсоединения ко входу «б» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23. Вход «2» пусковоздушной системы 45 первичного двигателя 2 синхронного дизель-генератора 1-2 в общем случае соединен единен со выходом блока 42 впрыска топлива (БВТ), у которого входы «1» и «2» подключены, как описано выше, к выходам датчиков 41 и 43 частоты вращения соответственно турбоэлектрокомпрессора 9 и первичного двигателя 2.
Автоматический генераторный выключатель 4 (QF1) синхронного дизель-генератора 1-2 снабжен замыкающим блок-контактом 48 и размыкающим блок-контактом 49, соединяющими источник единичных сигналов соответственно с входом (показан пунктиром) трехимпульсного электронного пропорционально-интегрально-дифференциального (ПИД) регулятора 38 и входом «6» (по стрелке Б) подсистемы 39 ДАУ синхронным дизель-генератором 1-2. Синхроимпульсы, управляющие коммутационными процессами обратимого электромашинного полупроводникового преобразователя 15 в период работы БОСЭМ 12 в режиме приводного вентильного двигателя, поступают на вход «5» его подсистемы 17 управления с выхода датчика 50 положения ротора 20 БОСЭМ 12. В периоды заряда и подзаряда независимой стартерной аккумуляторной батареи 22 упомянутого частного случая питание На автономный независимый обратимый полупроводниковый инвертор 23 переключают посредством его подсистемы 25 управления, катушки и контактов (не показаны) вспомогательного контактора 51 с выходных клемм статического полупроводникового преобразователя 14 на выходные клеммы автоматического выключателя 13. В периоды работы БОСЭМ 12 ток в цепи постоянного тока статического полупроводникового преобразователя 14 измеряют шунтом 52, а измеренный им сигнал посылают с него на вход «4» субблока 34 торможения БОСЭМ 12.
Способ адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора 1-2 в статических и динамических режимах осуществляют следующим образом.
1 Предварительная информация
Оснащение традиционного (с номинальной частотой вращения согласно документации до 20⋅10-3 мин-1) турбонаддувочного агрегата 9-10 (фиг. 1) дополнительным приводом от бустерной обратимой электрической машины 12, например, синхронной бесщеточной с электромагнитным возбуждением и с зубчатой передачей, вызывает (как замечено в критической характеристике известного способа-прототипа), увеличение его размеров, маховой массы и запасаемой этим агрегатом кинетической энергии в периоды его разгона и переходов от одного скоростного уровня к другому. По этой причине в динамических режимах работы синхронного дизель-генератора 1-2, связанных с внезапным набросом или сбросом его нагрузки, переход всего турбоэлектрического наддувочного агрегата (ТЭНА) 9-12 к новому установившемуся режиму происходит с еще большим, до нескольких секунд, запаздыванием (по отношению к изменению подачи топлива в камерах сгорания дизеля), чем в случае, когда синхронный дизель-генератор оборудован традиционным турбонаддувочным агрегатом 9-10 со свободным (чистым) наддувом.
Помимо этого, используемая в способе-прототипе серийная бустерная обратимая синхронная электрическая машина (БОСЭМ) с электромагнитным возбуждением в бесщеточном исполнении (другое исполнение - с щеточно-кольцевым аппаратом - исключается, вследствие проблематичной работы последнего при столь высоких частотах вращения), как известно, достаточно сложна, так как в ее общий корпус встроены дополнительно электромашинные возбудитель и подвозбудитель, а ее ротор содержит, кроме штатной обмотки возбуждения БОСЭМ 12, еще и якорную обмотку ее возбудителя, вращающийся выпрямитель и постоянные магниты подвозбудителя. Для охлаждения пристроенной посредством зубчатой передачи и соединительной муфты синхронной электромашины ее ротор снабжают вентиляционной крылаткой, а подшипники - жидкостной системой смазки, объединенной с системой смазки ТЭНА и дизель-генератора в целом. Такая усложненная конструкция известной БОСЭМ 12 повышает ее первоначальную стоимость, снижает надежность, ресурс до первого ремонта и срок службы, увеличивает инерционность, эксплуатационные расходы и трудоемкость обслуживания.
В то же время, присутствие БОСЭМ 12 на валу 11 ТЭНА 9-12 позволяет, используя ее как дополнительное и активное средство регулирования частоты вращения турбоэлектрокомпрессора 9 и воздействуя безинерционными полупроводниковыми управляющими средствами, причем с поддержанием номинального значения магнитного потока в ее воздушном зазоре, на режимы работы и электромагнитный момент этой БОСЭМ 12, компенсировать негативное действие суммарных инерционных сил всего ТЭНА 9-12 в целом и повысить его быстродействие до 1-2 секунд, т.е. в разы. Такое быстродействие ТЭНА дает вполне удовлетворительные результаты работы синхронного ДГ по экономическим и экологическим показателям - полноте сгорания топлива, дымности и токсичным выбросам в атмосферу - преимущественно в его статических режимах. Однако для радикального улучшения приемистости первичного двигателя и качества электроэнергии, вырабатываемой синхронным дизель-генератором в динамических режимах - амплитуды колебаний (размаха) частоты напряжения генератора 1 и времени ее восстановления, - этого быстродействия недостаточно.
Требуемой степени улучшения приемистости первичного двигателя 2 в заявляемом способе адаптивного автоматического регулирования давления наддувочного воздуха синхронного ДГ 1-2 достигают за счет совокупности мер конструктивно-технологического и программно-управленческого характера, изложенных ниже.
Конструктивно-технологические основы решения технической задачи. В заявляемом способе номинальную частоту вращения всего ТЭНА 9-12 в целом повышают до 50⋅10-3 мин-1 и более и, уменьшив за счет этого размеры и массу его составных элементов, в том числе и БОСЭМ 12, возбуждаемую от постоянных магнитов 19, встраивают ее, добившись «миниатюрных» размеров, в приемную полость (не показана) турбокомпрессора 9, разместив ее ротор 20 консольно на его валу 11 и исключив при этом из кинематической схемы малонадежную и нуждающуюся в уходе зубчатую передачу и соединительную муфту. Благодаря такому компактно-миниатюрному исполнению ТЭНА 9-12 понижают инерционность его вращающихся частей, чем увеличивают быстродействие агрегата в переходных режимах. И тогда в периоды внезапных изменений нагрузки на синхронный ДГ 1-2 реакция турбоэлектрического компрессора 9, выступающего регулятором давления наддувочного воздуха, и реакция одноимпульсного МЦРУС 5, являющегося регулятором подачи топлива, совпадают по фазе, чем и обеспечивают оптимальное для полноты сгорания топлива соотношение топливно-воздушной смеси в камерах сгорания первичного двигателя 2, высвобождение и превращение в механическую энергию всей, без остатка химической энергии сгораемого топлива и адекватное изменение вращающего момента на его коленчатом валу, т.е. его приемистость.
Таким образом, упростив конструкцию БОСЭМ 12 благодаря использованию постоянных магнитов 19 на роторе 20, встроив ее в приемную полость турбокомпрессора 9, т.е. в поток всасываемого воздуха этого турбокомпрессора, без промежуточной зубчатой передачи, без соединительной муфты и без вентиляционной крылатки, уменьшив размеры и массу всего ТЭНА 9-12 в целом благодаря повышению частоты вращения и размещению его отдельных элементов на одном валу-роторе, существенно снижают инерционность турбоэлектрокомпрессора 9 и повышают его быстродействие в динамических режимах, т.е. приемистость.
Но это еще не все. Размещение БОСЭМ 12 в приемной полости турбокомпрессора 9 на общем валу 11 и более чем двукратное повышение оборотов агрегата делают возможным заменить 4-6 подшипника скольжения, используемые в способе-прототипе, на два воздушных подшипника, многократно повысив их ресурс, снизив коэффициент трения и отказавшись полностью от жидкостной системы смазки ТЭНА 9-12. А это, в свою очередь, повышает надежность подшипниковых узлов, позволяет уменьшить трудоемкость их ухода и эксплуатационные затраты на их охлаждение и смазку. Кроме того, размещение статора и ротора БОСЭМ 12 в приемной полости турбокомпрессора 9 ТЭНА, т.е. в потоке всасываемого им отфильтрованного воздуха, позволяет использовать этот поток для охлаждения статора БОСЭМ 12, а следовательно, делает ненужной вентиляционную крылатку на ее роторе. Это, в свою очередь, еще более упрощает конструкцию ТЭНА 9-12, дополнительно снижает размеры, массу и инерционность его вращающихся частей, в большей степени повышает его надежность и уменьшает эксплуатационные расходы на охлаждение БОСЭМ 12.
Сущность программно-управленческого воздействия на турбоэлектроприводной компрессор наддува. Заменяя обмотку возбуждения на роторе БОСЭМ 12 на постоянные магниты 19, с одной стороны, сокращают у нее количество исполнительных органов, и вынуждают поэтому осуществлять программные воздействия на режимы этой электромашины и значения ее электромагнитного момента однозначно только по цепям управления обратимыми электромашинным 15 и сетевым 16 полупроводниковыми преобразователями ее статического полупроводникового преобразователя 14. Но, с другой стороны, такой способ управления названными параметрами БОСЭМ 12 по сравнению с воздействием по ее цепи возбуждения, используемым в способе-прототипе, отличает, как очевидно, значительно более высокое быстродействие вследствие безинерционности указанных полупроводниковых преобразователей. Иными словами, он таит в себе дополнительные резервы повышения быстродействия регулирования давления наддувочного воздуха синхронного ДГ в динамических режимах наброса / сброса его нагрузки. Чтобы в периоды внезапного изменения нагрузки синхронного ДГ 1-2 вовлечь эти резервы в действие для достижения конечного результата - еще большего быстродействия изменения производительности ТЭНА 9-12, - в заявляемом способе адаптивного регулирования давления наддува организуют, используя безинерционные свойства СПП 14, двухэтапные по времени программные воздействия на двигательно-генераторные режимы БОСЭМ 12 и ее электромагнитный момент по абсолютному значению.
На первом этапе наброса / сброса нагрузки на синхронный ДГ 1-2 одновременно с посылкой команд на изменение подачи топлива меняют и режим БОСЭМ 12, как быстродействующего регулятора воздухоподачи, устанавливая при этом предельные (номинальные) параметры измененного режима.
На втором этапе переходного процесса, используя сигналы обратных связей, восстанавливают предшествующий режим БОСЭМ 12, после чего теми же сигналами обратных связей корректируют значение ее электромагнитного момента в соответствии с новым статическим нагрузочным режимом синхронного ДГ 1-2.
В комплексе этими процессами управляют в разных режимах синхронного ДГ 1-2 в следующей последовательности.
2 Ввод в действие резервного синхронного дизель-генератора.
В режиме пуска синхронного ДГ 1-2, для обеспечения 100%-ной гарантии запуска его первичного двигателя 2 с первой попытки, очень важно к моменту впрыска первых порций топлива в его камеры сгорания подать в них воздух с оптимальными значениями давления и коэффициентом его избытка.
Поэтому когда на вход «3» подсистемы 39 (фиг. 1, фиг. 2) дистанционного автоматизированного управления резервным синхронным дизель-генератором 1-2 подают команду на его запуск, с выхода «4» этой подсистемы на вход «2» субблока 30 (СБП) пуска блока 27 логического управления БОСЭМ 12 направляют одновременно команду на разгон турбоэлектронаддувочного агрегата 9-12 за счет включения этой БОСЭМ 12 в режим приводного электродвигателя. В зависимости от того, имеется ли напряжение в электрической сети объекта в момент поступления команды на запуск синхронного ДГ 1-2, включение и разгон его БОСЭМ 12 производят от разных источников питания и разными методами:
1) если электросеть находится под напряжением (в обычныхусловиях), БОСЭМ 12 запускают от сетевого источника (не показан), подавая напряжение на ее клеммы (не показаны) по основной линии питания через автоматический выключатель 13 (QF2) и статический полупроводниковый преобразователь 14 и разгоняя ее в известном режиме приводного вентильного электродвигателя (Бут Д.А. Бесконтактные электрические машины. М.: Высш. шк., 1990. - 416 с.);
2) если, в частном случае, электросеть обесточена, БОСЭМ 12 запускают энергией независимой стартерной аккумуляторной батареи 22 резервного пуско-зарядного устройства 21, разгоняя ее в режиме синхронного электродвигателя известным методом частотного пуска.
2.1 Включение и разгон БОСЭМ от сетевого источника питания
Информацию о наличии напряжения в электросети объекта, т.е. на шинах 3 ГРЩ, на вход «v» блока 27 логического управления БОСЭМ 12 посылают датчиком 28 напряжения и направляют затем на вход «3» субблока 30 пуска. При наличии единичных сигналов одновременно на обоих входах: «2» (от подсистемы ДАУ) и «3» этого субблока, последний формирует на своем выходе «4» блокирующий сигнал (необходимый в частном случае исполнения), а на выходах «5» и «3» - пусковые сигналы. Блокирующим сигналом, направляемым в частном случае на вход «5» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23, блокируют работу последнего и в целом всего резервного пуско-зарядного устройства 21.
В обычных условиях пусковыми сигналами субблока 30 пуска с его выхода «5» замыкают автоматический выключатель 13 (QF2) и подают питающее напряжение на сетевой обратимый полупроводниковый преобразователь 16 (UZ2), а с выхода «3» устанавливают через посредство субблока 31 (СБЗР) задания режима для БОСЭМ 12 режим ее работы приводным вентильным электродвигателем. (Такое название синхронные машины с электромашинным полупроводниковым преобразователем на входе получили потому, что входящие в них полупроводниковые приборы часто называют полупроводниковыми вентилями. Синхронная машина 12 работает в режиме вентильного электродвигателя, когда для естественной коммутация полупроводниковых вентилей (не показаны) ее электромашинного преобразователя 15, включаемого в режим зависимого инвертора, используют электродвижущую силу, наводимую в якорной обмотке (не показана) этой машины 12, а синхронизирующие импульсы на систему управления 17 данным электромашинным преобразователем 15 посылают посредством датчика 50 положения ротора 20).
Для включения БОСЭМ в режим приводного вентильного электродвигателя, реверсивными сигналами с выходов «1» и «2» субблока 31 (СБЗР) воздействуют на входы «5» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12. Этими сигналами блокируют работу субблока 33 управления генераторным режимом и передают управление БОСЭМ 12 субблоку 32 управления двигательным режимом. Сигналом с выхода «1» последнего субблока, направляемым на подсистему 18 управления сетевым обратимым полупроводниковым преобразователем 16, задают последнему режим работы управляемым выпрямителем. Одновременно с этим электромашинному обратимому полупроводниковому преобразователю 15 (UZ1) сигналом с выхода «2» субблока 32 управления двигательным режимом задают режим работы зависимым инвертором, ведомым электродвижущей силой, наведенной в якорной обмотке вентильной БОСЭМ 12, который реализуют посредством подсистемы 17 управления через ее вход «3». Для работы сетевого обратимого полупроводникового преобразователя 16 в указанном для него режиме синхронизирующие импульсы на вход «1» его подсистемы 18 управления посылают посредством синхронизирующего трансформатора 36. А такие же сигналы на вход «5» подсистемы 17 управления электромашинным обратимым полупроводниковым преобразователем 15 (UZ1) посылают датчиком 50 положения ротора 20 вентильной БОСЭМ 12, включенной в режим приводного вентильного электродвигателя.
Выпрямленное напряжение Ud сетевого обратимого полупроводникового преобразователя 16 подводят к входным клеммам (не показаны) электромашинного обратимого полупроводникового преобразователя 15 (UZ1) и преобразуют его, по сигналам подсистемы 17 управления, в переменное напряжение с частотой электродвижущей силы (ЭДС), наводимой в якорной обмотке приводного вентильного электродвигателя - БОСЭМ 12. Значение электромагнитного момента БОСЭМ 12, включенной на режим работы приводным вентильным электродвигателем, и ее частоту вращения регулируют, как известно, посредством изменения выпрямленного напряжения Ud в цепи постоянного тока СПП 14, которое согласно выражению для выпрямителя, собранного по трехфазной мостовой схеме, как в частности ранее отмечено, равно:
Ud=kв⋅Uвх⋅cos α,
(где Ud - выпрямленное напряжение сетевого преобразователя-выпрямителя 16;
Uвх - напряжение питания на входе выпрямителя 16;
kв - коэффициент выпрямления выпрямителя 16;
α - угол управления в данном частном случае силовыми транзисторами выпрямителя 16) и зависит от угла управления α силовыми транзисторами управляемого выпрямителя 16. Уменьшая с программно заданной (в субблоке 32 управления двигательным режимом) скоростью угол управления α, повышают напряжение Ud цепи постоянного тока СПП 14, увеличивают электромагнитный момент приводного вентильного электродвигателя - БОСЭМ 12 - и разгоняют ТЭНА 9-12 синхронно с разгоном первичного двигателя 2 его пуско-воздушной системой 45.
Если обратимые сетевой 16 и электромашинный 15 полупроводниковые преобразователи будут собраны не на силовых транзисторах типа IGBT, как в данном заявляемом изложенном частном случае, а на тиристорах, как в другом частном случае, то и в этом случае первоначальный разгон БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12 в промежутке времени t0 - t1 (фиг. 3, где обозначены: Рс, РРДГ, РБОСЭМ - мощности, развиваемые соответственно сетевым (работающим) источником, резервным (запускаемым) дизель-генератором и бустерной обратимой электрической машиной; Рн - номинальная мощность РДГ; nд, nк - частоты вращения соответственно РДГ и турбоэлектрокомпрессора) до начальной частоты вращения nк нач, примерно равной 5% номинальной, производят в режиме приводного синхронного электродвигателя известным способом частотного пуска, реализуемым посредством подсистемы 17 управления (фиг. 1) электромашинным полупроводниковым преобразователем 15, работающим в период запуска в указанном промежутке времени в режиме автономного инвертора при отключенных синхронизирующем трансформаторе 35 и датчике 50 положения ротора 20 БОСЭМ 12. Процесс разгона БОСЭМ 12 также контролируют датчиком 41 частоты вращения ТЭНА 9-12, сигналы которого nк приходят на вход «1» субблока 30 пуска (фиг. 1, фиг. 2). При частоте вращения nк нач в момент времени t1 (фиг. 3) на выходах «1» и «2» субблока 30 пуска (фиг. 1, фиг. 2) устанавливают единичные сигналы, которыми воздействуют на входы «3» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12. Субблок 32 управления, в свою очередь, своими сигналами на выходах «1» и 2» переключает БОСЭМ 12 посредством подсистем 18 к 17 управления соответственно сетевым 16 и электромашинным 15 обратимыми полупроводниковыми преобразователями на продолжение его разгона в известном режиме приводного вентильного электродвигателя. Электромашинный обратимый полупроводниковый преобразователь 15, как отмечено выше, переключают при этом в режим зависимого инвертора посредством подачи синхроимпульсов на вход «5» подсистемы 17 управления с выхода датчика 50 положения ротора 20 БОСЭМ 12.
К моменту t3 (фиг. 3) ТЭНА 9-12 (фиг. 1) разгоняют до частоты вращения nк1, при которой турбоэлектрокомпрессором 9 ТЭНА 9-12 развивают производительность, которая обеспечивает оптимальные значения давления и коэффициента избытка воздуха в заранее прогретых (в известном предшествующем режиме дежурной готовности) камерах сгорания первичного двигателя 2, гарантирующие со стопроцентной вероятностью устойчивое воспламенение первых порций впрыскиваемого топлива. Впрыск топлива в камеры сгорания в момент t3 производят посредством пусковоздушной системы 45 по сигналу, формируемому на выходе блока 42 (БВТ) впрыска топлива, когда оба его входа «1» и «2» будут заняты одновременно сигналами соответственно nк1 и nд min (фиг. 3, здесь nд min - это наименьшая частота вращения коленвала первичного двигателя 2, при которой он может устойчиво работать на топливе), посылаемыми датчиками 41 и 43 частоты вращения (фиг. 1) соответственно турбоэлектрокомпрессора 9 и первичного двигателя 2.
С переходом первичного двигателя 2 на топливо и его дальнейшим разгоном в промежутке t3-t4 (фиг. 3) за счет автоматического увеличения его подачи посредством одноимпульсного МЦРУС 5 и его топливной рейки 7 (фиг. 1) продолжают и программный разгон БОСЭМ 12 и турбоэлектрокомпрессора 9 сигналами, пропорциональными возрастающей подаче топлива gт и посылаемыми потенциометром 8 топливной рейки 7 через сумматор 29 блока логического управления 27 на вход «4» субблока 32 управления двигательным режимом (фиг. 1, фиг. 2) БОСЭМ 12. Существенно, что с переходом дизеля 2 на топливо к вращению турбоэлектрокомпрессора 9 подключают автоматически и утилизационную газовую турбину 10, на лопатки которой (не показаны) направляют в нарастающем количестве отработавшие газы дизеля 2. После достижения последним в момент времени t4 номинальной частоты вращения nдн (фиг. 3), изменение (увеличение) подачи топлива посредством одноимпульсного МЦРУС 5 (фиг. 1) и синхронное с ним изменение сигнала gт на потенциометре 8, направляемого тем же путем на входы «4» того же субблока 32 управления двигательным режимом, по сигналу датчика 43 прекращают, как и разгон БОСЭМ 12, при такой частоте вращения nк хх (фиг. 3) турбоэлектронаддувочного агрегата 9-12 (фиг. 1), при которой его турбоэлектрокомпрессором 9 развивают оптимальную производительность уже для режима холостого хода синхронного дизель-генератора 1-2.
Так, с установлением на запускаемом синхронном ДГ 1-2 номинальной частоты вращения, ее сигнал nд н (фиг. 3, фиг. 1) с выхода датчика 43 его частоты вращения приходит на вход «2» подсистемы 39 ДАУ указанным синхронным ДГ. По этому сигналу приступают в промежутке t4-t5 к выполнению посредством данной подсистемы ДАУ известной подпрограммы синхронизации синхронного генератора 1 с сетевым источником питания (не показан), и завершают эту подпрограмму замыканием в момент t5 генераторного автоматического выключателя 4 (QF1), посылая сигнал его включения с выхода «5» подсистемы 39 ДАУ.
Замыкающим блок-контактом 48 данного автоматического выключателя 4 (QF1) воздействуют на трехимпульсный электронный ПИД-регулятор 38 подачи топлива и запускают им известную (по способу-прототипу) подпрограмму плавно-замедленного автоматического выравнивания нагрузок между сетевым (не показан) и резервным (вводимым) 1-2 генераторными агрегатами. По этой подпрограмме в промежутке t5-t8 (фиг. 3) синхронно увеличивают подачу топлива у подключенного резервного синхронного ДГ 1-2 (кривая РРДГ) и уменьшают ее на работающем, сетевом генераторном агрегате (кривая Рс). Плавное замедленное программное увеличение нагрузки на синхронном дизель-генераторе 1-2 производят трехимпульсным электронным ПИД-регулятором 38 (фиг. 1), на выходе «ΔР» которого формируют сигнал приращения статической нагрузки, направляемый на серводвигатель 6 одноимпульсного МЦРУС 5 с целью увеличения подачи топлива в камеры сгорания первичного двигателя 2. Тем же ПИД-регулятором 38 измеряют фактическое значение «Р» возрастающей активной нагрузки на синхронном ДГ 1-2, а также и ее производной «dP/dt». Причем сигнал динамического приращения (производной изменения нагрузки), измеряемый на выходе «dP/dt» трехимпульсного электронного ПИД-регулятора 38, при сравнительно медленном приеме нагрузки практически равен нулю, и воздействия на состояние субблоков блока 27 логического управления БОСЭМ 12 он в этом режиме не оказывает.
Серводвигателем 6 одноимпульсного механогидравлического центробежного регулятора 5 угловой скорости, принявшим сигнал приращения статической нагрузки «ΔР» с выхода трехимпульсного электронного ПИД-регулятора 38, перемещают топливную рейку 7 и связанный с ней ползунок (не показан) потенциометра 8, увеличивая в этот период t5-t8 подачу топлива в цилиндры резервного синхронного ДГ 1-2 и его статическую нагрузку Рдг (фиг. 3). Сигнал gт о возрастающей подаче топлива синхронного ДГ 1-2 (фиг. 1), снимаемый с потенциометра 8, направляют на вход «2» сумматора 29 блока 27 логического управления БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12, выполняющего функцию регулятора давления наддувочного воздуха синхронного ДГ 1-2.
Так, с выхода сумматора 29 сигнал подачи топлива посылают на вход «4» субблока 32 управления двигательным режимом БОСЭМ 12 (фиг. 2, фиг. 1). Его сигналом на выходе «1» воздействуют на подсистему 18 управления сетевым обратимым полупроводниковым преобразователем 16, посредством которой уменьшают согласно вышеприведенному выражению угол α управления его силовыми транзисторами и увеличивают в промежутке t5-t6 (фиг. 3) напряжение Ud в цепи постоянного тока СПП 14 прямо пропорционально возрастающей нагрузке синхронного ДГ 1-2, а также ток, электромагнитный момент и мощность (кривая РБОСЭМ), развиваемые вентильной БОСЭМ 12, чтобы с повышением подачи топлива на резервный синхронный ДГ 1-2 (фиг. 1) увеличить одновременно и производительность его турбоэлектрокомпрессора 9, а следовательно, расход и давление наддувочного воздуха в камерах сгорания нагружаемого первичного двигателя 2. Причем, возрастающего вращающего момента, развиваемого утилизационной газовой турбиной 10 турбоэлектронаддувочного агрегата 9-12 в этом диапазоне нагрузок и параметрах выхлопных газов первичного двигателя 2, все еще недостаточно.
Но по мере дальнейшего возрастания статической нагрузки на резервном синхронном ДГ 1-2 увеличиваются и параметры его отработавших выхлопных газов - масса, температура, давление, - направляемых на лопатки утилизационной газовой турбины 10. Вследствие этого наращивают развиваемый ею на общем валу 11 вращающий момент, суммируемый с электромагнитным двигательным моментом БОСЭМ 12. Чтобы при этом не допустить перерегулирования давления наддувочного воздуха, нагнетаемого турбоэлектрокомпрессором 9 в камеры сгорания первичного двигателя 2, в промежутке t6-t7 (фиг. 3) приступают к снижению вращающего электромагнитного момента, развиваемого БОСЭМ 12 в режиме приводного вентильного электродвигателя, и потребляемой ею мощности (кривая РБОСЭМ) обратно пропорционально возрастающей статической нагрузке на резервном синхронном дизель-генера-торе 1-2. Это производят следующим образом.
Когда, при нагрузке «РРДГ» резервного синхронного ДГ 1-2, примерно равной 15% номинальной (момент времени t6), нарастающее давление наддувочного воздуха в воздушном коллекторе, измеряемое датчиком 40 (фиг. 1) и непрерывно посылаемое на вход «1» субблока 32 управления двигательным режимом БОСЭМ 12 (фиг. 2), превысит оптимальное (программно заданное) значение, хранимое в памяти того же субблока 32 для текущей нагрузки резервного синхронного ДГ 1-2, и информацию «Р» о которой с одноименного выхода трехимпульсного электронного ПИД-регулятора принимают на вход «6» все того же субблока 32, то сигналом перерегулирования давления воздуха, формируемым на выходе «1» данного субблока 32 управления двигательным режимом, снижают тем же путем - посредством увеличения угла α управления силовыми транзисторами - в промежутке t6-t7 (фиг. 3) напряжение Ud в цепи постоянного тока СПП 14 (фиг. 1), а также ток, электромагнитный двигательный момент и мощность, развиваемые вентильной БОСЭМ 12, и устанавливают посредством этого в каждый последующий момент времени оптимальные для текущих значений нагрузки резервного синхронного ДГ1-2 значения частоты вращения и производительности турбэлектрокомпрессора 9, а следовательно, расхода, давления и коэффициента избытка наддувочного воздуха в камерах сгорания нагружаемого первичного двигателя 2. При нагрузке резервного синхронного ДГ1-2, примерно равной 35% номинальной (момент времени t7 на фиг. 3), утилизационная газовая турбина 10 (фиг. 1) способна самостоятельно, без поддержки БОСЭМ 12 обеспечить требуемую производительность турбоэлектрокомпрессора 9. Поэтому в данном нагрузочном режиме резервного синхронного дизель-генератора 1-2 в момент t7 его БОСЭМ 12 этим же путем автоматически переводят уже в режим холостого хода. Так, в момент t7, когда ток нагрузки БОСЭМ 12 станет равным нулю, сигнал на выходе датчика 44 холостого хода и направления мощности (фиг. 2, фиг. 1) меняется на противоположный. Этим сигналом, посылаемым в данный момент на вход «3» сублока 31 задания режима блока 27 логического управления статическим полупроводниковым преобразователем 14 БОСЭМ 12, который управляет данной машиной и ее режимами, осуществляя программные изменения знака электромагнитного момента на ее валу, последнюю переводят в генераторный режим холостого хода. Это производят реверсивными сигналами, формируемыми на выходах «1» и «2» субблока 31 задания режима БОСЭМ 12 и посылаемыми на входы «5» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12. По командному сигналу на входе «5» субблока 32 управления двигательным режимом его работу блокируют, и управление БОСЭМ 12 передают субблоку 33 управления генераторным режимом. Сигналами на выходах «1» и «2» последнего воздействуют на входы «4» подсистем соответственно 18 и 17 управления, и обращают соответственно сетевой обратимый полупроводниковый преобразователь 16 в режим зависимого инвертора, ведомого сетью, а электромашинный обратимый полупроводниковый преобразователь 15 - в режим управляемого выпрямителя. Синхронизирующие сигналы для работы подсистемы 18 и 17 управления этими полупроводниковыми преобразователями в названных режимах посылают посредством синхронизирующих трансформаторов 36 и 35 соответственно. Причем, что существенно, углы α управления силовыми транзисторами этих преобразователей в данном генераторном режиме работы БОСЭМ 12 на холостом ходу устанавливают равными таким значениям, чтобы выпрямленное напряжение Ud в цепи постоянного тока СПП 14 было равно нулю. Так, если полупроводниковые преобразователи выполнены по трехфазной мостовой схеме выпрямления, как в данном частном случае, то углы α управления обоих преобразователей в режиме холостого хода должны быть равны αв xx=αи хх=90° электрических, так как выпрямленное напряжение Ud 15 выпрямителя 15, определяемое согласно приведенному выражению как
Ud 15=kв⋅Uвx⋅cos αв
и напряжение Ud 16 на входе сетевого полупроводникового инвертора 16, рассчитываемое как
Ud 16=kв⋅Uвx⋅cos (180-αи),
будут при этих углах управления αв и αи иметь нулевые значения.
При дальнейшем увеличении статической нагрузки на резервном синхронном ДГ 1-2, свыше 35% номинальной, возрастающая располагаемая мощность утилизационной газовой турбины 10 и производительность вращаемого ею турбоэлектрокомпрессора 9 становятся избыточными. Чтобы и в этих условиях избежать перерегулирование параметров наддувочного воздуха в камерах сгорания первичного двигателя 2, вал 11 турбоэлектрокомпрессора 9 подтормаживают за счет увеличения в промежутке t7-t8 (фиг. 3, кривая РБОСЭМ) электромагнитного тормозного момента БОСЭМ 12 (фиг. 1), переведенной в указанный момент t7 в генераторный режим. В способе-прототипе эту операцию выполняют посредством увеличения напряжения и тока возбуждения БОСЭМ, снабженной обмоткой возбуждения на роторе. В заявляемом способе адаптивного регулирования давления наддувочного воздуха первичного двигателя 2 это сделать невозможно, так как БОСЭМ 12 возбуждают постоянными магнитами 19, т е. ее магнитный поток в воздушном зазоре во всех режимах поддерживают неизменным (номинальным). Поэтому якорный ток, электромагнитный (тормозной) момент и мощность БОСЭМ 12 по заявляемому способу увеличивают путем согласованного уменьшения в обоих приведенных выражениях углов αвi и αиi управления силовыми транзисторами соответственно для управляемого выпрямителя 15 и зависимого инвертора 16 посредством их подсистем соответственно 17 и 18 управления по сигналу увеличения подачи топлива gт, который снимают с потенциометра 8 и посылают через сумматор 29 на вход «4» субблока 33 управления генераторным режимом БОСЭМ 12, а с выходов «1» и «2» этого субблока 33 - уже на входы «4» указанных подсистем 17 и 18 управления. Причем, переходные процессы в БОСЭМ 12, вызванные управленческими воздействиями на безинерционные элементы СПП 14, протекают в разы быстрее, нежели при воздействии на ее инерционную цепь возбуждения (в способе-прототипе). В этом и заключается одно из преимуществ заявляемого способа адаптивного управления давлением наддувочного воздуха первичного двигателя 2 резервного синхронного дизель-генератора 1-2.
Переходный процесс выравнивания нагрузок между обоими генераторными агрегатами завершают автоматически в момент времени t8 (фиг. 3), когда их нагрузки РРДГ и Рс будут равны, и сигналы изменений нагрузок - динамических «dP/dt» и статических «ΔР» - на выходах трехимпульсных электронных ПИД-регуляторов 38 (фиг. 1) обоих генераторных агрегатов принимают нулевые значения. На этом ввод в действие резервного синхронного ДГ 1-2 на параллельную работу с сетевым генераторным агрегатом, сопровождаемый включением и разгоном его БОСЭМ 12 от сетевого же генератора, завершают.
2.2 Включение и разгон БОСЭМ при запуске резервного ДГ в частном случае от резервного источника
При внезапном исчезновении питания в электрической сети потребителя, именуемом «блэкаутом», запуск резервного синхронного ДГ 1-2 (фиг. 1) по способу-прототипу производят при почти неподвижном ТЭНА 9-10. Поэтому впрыск в нем первых порций топлива в камеры сгорания дизеля производят при заниженном давлении и коэффициенте избытка воздуха, что может привести к его незапуску с первой попытки, затягиванию продолжительности «блэкаута» и усугублению нештатной ситуации на объекте электроснабжения.
В этой ситуации в заявленном способе адаптивного автоматического регулирования давления наддувочного воздуха запускаемого первичного двигателя 2 в частном случае включение и разгон БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12 в период «блэкаута» производят энергией независимой стартерной аккумуляторной батареи 22 резервного пуско-зарядного устройства 21 по следующему методу.
С появлением в момент t0 (фиг. 4) на входе «3» подсистемы 39 ДАУ (фиг. 1, фиг. 2) команды «Пуск» резервного синхронного ДГ 1-2 при обесточенной электрической сети аналогичную команду, как сказано выше, посылают с выхода «4» этой подсистемы ДАУ на вход «2» субблока 30 пуска блока 27 логического управления БОСЭМ 12. Вход «3» этого субблока 30 в рассматриваемой ситуации занят нулевым сигналом, поступающим с выхода «2» датчика 28 сетевого напряжения, подключенного к шинам 3 ГРЩ, которые в данный момент обесточены. В этом случае команду «Пуск» БОСЭМ 12 дублируют на выходе «4» субблока 30 пуска и направляют ее на вход «5» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23 резервного пуско-зарядного устройства 21. По этой команде посредством данного автономного независимого обратимого полупроводникового инвертора 23 и под управлением его подсистемы 25 управления производят им программное преобразование напряжения ±Uвх постоянного тока независимой стартерной батареи 22, равное, в частности, 24 В, в напряжение ~U1вых переменного тока нарастающей частоты ƒвых с программно заданной в подсистеме 25 управления скоростью dƒ/dt, повышают это напряжение посредством независимого согласующего трансформатора 24 до значения ~ U2вых и направляют его на клеммы БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12. Разгоняя ее по мере увеличения частоты ƒвых выходного напряжения ~U1вых независимого обратимого полупроводникового инвертора 23, повышают и его действующее значение напряжение ~U2вых на клеммах БОСЭМ 12, согласно закону частотного регулирования для механизма с вентиляторной нагрузкой, по соотношению:
 ,
,
где U2вых, ƒ - переменное выходное напряжение и его частота на клеммах БОСЭМ.
Тем самым производят известный частотный разгон БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12 в режиме приводного синхронного электродвигателя по кривой nк (фиг. 4), а заодно и его турбоэлектрокомпрессора 9, которые конструктивно, как заявлено, исполнены на одном валу 11. Одновременно с этим разгоняют и первичный двигатель 2 резервного синхронного ДГ 1-2 по кривой nд посредством его пусковоздушной системы 45 (фиг. 1) по сигналу, приходящему на ее вход «1» с выхода «2» подсистемы 39 ДАУ. Разгон первичного двигателя 2 и его турбоэлектронаддувочного агрегата 9-12 контролируют соответственно датчиками 43 и 41 частоты вращения. Когда в момент (фиг. 4) входы «1» и «2» блока 42 (фиг. 1) впрыска топлива занимают одновременно единичные сигналы nд min и nк1 этих датчиков, с его выхода посылают сигнал «Впрыск топлива» на вход «2» пусковоздушной системы 45 первичного двигателя 2 резервного синхронного ДГ 1-2. Разгоняют первичный двигатель на топливе. При достижении в момент t2 частоты вращения nк1 турбоэлектрокомпрессора 9 его производительность соответствует оптимальным значениям давления и коэффициента избытка воздуха в камерах сгорания запускаемого первичного двигателя 2 для режима первичного воспламенения топлива, поэтому последний с первой попытки впрыска топлива в данный момент сразу переходит на его устойчивое воспламенение, и разгон первичного двигателя 2 в промежутке t2-t3 (фиг. 4) до частоты вращения nд н продолжают на топливе в режиме автоматического увеличения его подачи посредством одноимпульсного МЦРУС 5 (фиг. 1), перемещающего топливную рейку 7 и ползунок потенциометра 8. При этом сигнал gт увеличения подачи топлива, снимаемый с потенциометра 8, направляют в сумматор 29 блока 27 логического управления БОСЭМ 12, а выходным сигналом этого сумматора воздействуют на вход «6» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23. По этому сигналу ее независимым обратимым полупроводниковым инвертором 23 продолжают разгон БОСЭМ 12 турбоэлектронаддувочного агрегата 9-12 по кривой nк (фиг. 4) тем же частотным методом до частоты вращения nк хх турбоэлектрокомпрессора 9, при которой его производительность соответствует оптимальным значениям давления и коэффициента избытка воздуха в камерах сгорания первичного двигателя 2 теперь уже для режима холостого хода последнего.
При этом сигнал nд н о состоявшемся запуске первичного двигателя 2 с выхода датчика 43 частоты вращения (фиг. 1) посылают на вход «2» его подсистемы 39 ДАУ, а с клемм (не показано) синхронного генератора 1 - и сигнал на нее о его возбуждении до напряжения 85% номинального. При совпадении поступления в подсистему 39 ДАУ этих сигналов в момент времени t4 (фиг. 4) с выхода «5» подсистемы 39 ДАУ (фиг. 1) посылают команду включения генераторного автоматического выключателя 4 (QF1), посредством которого напряжение синхронного генератора 1 подают на шины 3 ГРЩ. О появлении на этих шинах напряжения датчиком 28 напряжения с его выхода «2» информируют субблок 30 пуска блока 27 логического управления сигналом на его входе «3» (фиг. 2) и с выхода «1» подсистему 25 управления (фиг. 1) автономным независимым обратимым полупроводниковым инвертором 23 резервного пуско-зарядного устройства 21 - сигналом на ее входе «4».
С выхода «5» субблока 30 пуска посылают единичный командный сигнал на включение автоматического выключателя 13 (QF2), и после его замыкания подают питание на силовую и управляющие цепи статического полупроводникового преобразователя 14 БОСЭМ 12. Одновременно с выходов «3, 1 и 2» субблока 30 пуска посылают сигналы на ввод в действие соответственно субблоков: 31 задания режима, 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12 блока 27 логического управления последней. При этом нулевым сигналом на выходе «4» субблока 30 пуска, посылаемом на вход «5» подсистемы 25 управления автономным независимым обратимым полупроводниковым инвертором 23, блокируют за ненадобностью работу последнего в инверторном режиме.
Сигналом, пришедшим на вход «4» субблока 31 задания режима и переданным последним на реверсивные входы «5» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12, устанавливают под воздействие какого из этих субблоков передать дальнейшее управление БОСЭМ 12. Для этого сигналом, посылаемым на вход «5» субблока 33 управления генераторным режимом, его работу блокируют, а сигналом, посылаемым на аналогичный вход субблока 32 управления двигательным режимом, БОСЭМ 12 передают под управление данного субблока 32.
С появлением после замыкания автоматического выключателя 13 (QF2) питающего напряжения на всех цепях статического полупроводникового преобразователя 14 и направлением сигналов управления с выходов «1» и «2» субблока 32 управления двигательным режимом БОСЭМ 12 на входы «3» подсистем 18 и 17 управления соответственно сетевым 16 и электромашинным 15 обратимыми полупроводниковыми преобразователями, переключают БОСЭМ 12 с режима частотноуправляемого приводного синхронного электродвигателя в режим приводного вентильного электродвигателя с питанием ее по основной линии через СПП 14. При этом, для работы БОСЭМ 12 в режиме приводного вентильного электродвигателя, сетевой обратимый полупроводниковый преобразователь 16 включают посредством его подсистемы 18 управления в режим управляемого выпрямителя, а электромашинный обратимый полупроводниковый преобразователь 15 включают посредством его подсистемы 17 управления в режим зависимого инвертора с направлением синхронизирующих импульсов на ее вход «5» от датчика 50 положения ротора 20 БОСЭМ 12. Далее одиночно работающий резервный синхронный дизель-генератор 1-2, подключенный к шинам 3 ГРЩ посредством его автоматического выключателя 4 (QF1), нагружают за счет поочередного включения в работу электрических приемников (не показаны) объекта с учетом их приоритета. При этом ступенчатый характер изменения мощности РРДГ нагружаемого резервного синхронного ДГ 1-2 и мощности РБОСЭМ его бустерной обратимой синхронной электрической машины 12, а также частот вращения nд первичного двигателя 2 и nк турбоэлектрокомпрессора 9 проиллюстрированы на фиг. 4.
Если, после получения подсистемой 25 управления автономным независимым обратимым полупроводниковым инвертором 23 единичного сигнала на входе «4» о появлении напряжения на шинах 3 ГРЩ, такой же единичный сигнал поступит и на ее вход «3» с выхода датчика 26, сигнализирующий о нормальном рабочем значении напряжения на клеммах независимой стартерной аккумуляторной батареи 22, то работу подсистемы 25 управления прекращают, блокируя, как отмечено, формирование на ее выходе импульсов управления силовыми транзисторами (не показаны) автономного независимого обратимого полупроводникового инвертора 23.
Если же напряжение на клеммах независимой стартерной аккумуляторной батареи 22 за время пуска БОСЭМ 12 снизится ниже допустимого уровня, контролируемого датчиком 26 напряжения независимой стартерной аккумуляторной батареи, на вход «3» подсистемы 25 управления посылают с выхода этого датчика сигнал ноль. Тогда, после установления единичного сигнала на ее входе «4», посылаемого датчиком 28 напряжения электросети, автономный независимый обратимый полупроводниковый инвертор 23 переключают, посредством этой подсистемы 25 управления, в режим выпрямителя с целью автоматического подзаряда независимой стартерной аккумуляторной батареи 22 одним из известных методов заряда. Одновременно с этим сигналом с выхода «2» подсистемы 25 управления подают питание на катушку 51 вспомогательного контактора, контактами которого (не показано) переключают цепь питания обращенного в выпрямитель автономно независимого обратимого полупроводникового инвертора 23 с выходных клемм СПП 14 на выходные клеммы автоматического выключателя 13 (QF2). Синхроимпульсы, требуемые для работы независимого обратимого инвертора 23 в данном режиме выпрямителя, посылают на вход «1» подсистемы 25 управления посредством синхронизирующего трансформатора 37. Когда независимую стартерную аккумуляторную батарею 22 зарядят до номинального напряжения, датчик 26 напряжения сменит значение своего выходного сигнала на единицу. Этим сигналом, посылаемым на вход «3» подсистемы 25 управления, блокируют формирование подсистемой 25 импульсов управления силовыми транзисторами автономного независимого обратимого полупроводникового инвертора/выпрямителя 23, снимают питание с катушки 51 вспомогательного контактора, прекращают работу всего резервного пуско-зарядного устройства 21.
2.3 Работа ДГ в статических режимах
Как известно, в диапазоне статических нагрузок дизель-генератора, снабженного турбокомпрессором со свободным наддувом, менее 35% номинальной, давление и расход отработавших газов дизеля недостаточны для того, чтобы он (турбокомпрессор) самостоятельно поддерживал в камерах сгорания оптимальные значения давления и коэффициента избытка воздуха. Следствием этого является повышение удельного расхода топлива из-за его неполного сгорания в условиях недостатка кислорода, образование сажи на стенках камер сгорания и выхлопного тракта, а также вредных продуктов неполного сгорания в отработавших выхлопных газах.
Но в турбоэлектроприводном наддувочном агрегате 9-12 (фиг. 1) недостающий вращающий момент для поддержания необходимых угловых скоростей и производительности турбоэлектрокомпрессора 9 наддува после запуска ДГ 1-2 на параллельную работу и приема нагрузки в период t5-t7 (фиг. 3) создают за счет продолжения работы вентильной БОСЭМ 12 в двигательном режиме, как это выполнено и в известном способе-прототипе. При этом в промежутке t5-t6 работы ДГ с малыми нагрузками, не превышающими 15-20% номинальной, БОСЭМ 12 развивает возрастающий электромагнитный двигательный момент и потребляет нарастающую мощность РБОСЭМ, которые увеличивают прямо пропорционально сигналам увеличения подачи топлива на ДГ 1-2, поступающим с потенциометра 8.
Но по мере дальнейшего увеличения статической нагрузки на синхронный ДГ 1-2 растут, как замечено, давление, температура и расход отработавших выхлопных газов дизеля 2, а следовательно, и вращающий момент, развиваемый утилизационной газовой турбиной 10 турбоэлектрокомпрессора 9-12 наддува и приводящий в промежутке t6-t7 к чрезмерному росту его частоты вращения. Чтобы в этих условиях не допустить перерегулирования давления наддувочного воздуха, электромагнитный двигательный момент и мощность РБОСЭМ вентильной БОСЭМ 12 в заявленном решении по сигналам обратной связи, посылаемым датчиком 40 давления наддувочного воздуха на вход «1» субблока 32 управления двигательным режимом (фиг. 2), уменьшают на его валу обратно пропорционально сигналам увеличения подачи топлива на ДГ 1-2, поступающим в блок 27 логического управления БОСЭМ 12 с потенциометра 8.
При загрузке синхронного дизель-генератора 1-2 мощностью, равной 35% номинальной (момент времени t7 на фиг. 3), когда утилизационная газовая турбина 10 турбоэлектрокомпрессора 9 наддува способна самостоятельно создавать в камерах сгорания дизеля 2 оптимальные значения давления и коэффициента избытка воздуха, вентильная БОСЭМ 12 уже работает в режиме холостого хода. А при загрузке дизель-генератора 1-2 свыше 35% номинальной (промежуток t7-t8 и далее) ее переводят по сигналу датчика 44 холостого хода и направления мощности, посылаемому на вход «3» субблока 31 задания режима (фиг. 1, фиг. 2), в генераторный режим. Этот перевод осуществляют следующим образом. Выходными сигналами, посылаемыми данным субблоком 31 со своих реверсивных выходов «1» и «2» на входы «5» субблоков 32 и 33 управления соответственно двигательным и генераторным режимами, последние переключают, посредством подсистем 18 и 17 управления, сетевой полупроводниковый преобразователь 16 в режим зависимого инвертора, а электромашинный полупроводниковый преобразователь 15 - в режим управляемого выпрямителя. Синхронизирующие импульсы для работы последнего в выпрямительном режиме посылают на вход «1» его подсистемы управления 17 посредством синхронизирующего трансформатора 35.
Посредством БОСЭМ 12, развивающей в данном генераторном режиме тормозной электромагнитный момент, притормаживают вращение турбоэлектрокомпрессора 9 до частот, создающих в камерах сгорания вводимого дизеля 2 оптимальные значения давления и коэффициента избытка наддувочного воздуха для текущего уровня нагрузки синхронного ДГ 1-2. В генераторном режиме БОСЭМ 12 развивает тем большую мощность (кривая РБОСЭМ на фиг. 3), чем выше нагрузка синхронного ДГ 1-2, т.е. чем выше параметры отработавших выхлопных газов, подаваемых на утилизационную газовую турбину 10. Эту мощность направляют посредством обратимого статического полупроводникового преобразователя 14 по линии питания БОСЭМ 12 через автоматический выключатель 13 (QF2) в электрическую сеть потребителя, и в номинальном режиме ДГ 1-2 она составляет примерно 5% номинальной мощности дизеля.
3 Регулирование давления наддувочного воздуха в динамических режимах дизель-генератора, нагруженного выше 35% номинальной мощности
Продолжительность работы дизель-генераторов электростанции в режимах со статической нагрузкой выше 35% номинальной в эксплуатации является преобладающей. По этой причине понятно стремление оптимизировать их работу именно в этих режимах. Существенно то, что у дизель-генераторов, работающих в составе автономных электростанций, динамические режимы, являются не единичными, от случая к случаю возникающими событиями, а часто повторяющимися переходными процессами, сопровождающими, в частности, включение и отключение каждого электроприемника. В результате, работа синхронных ДГ в динамических режимах оказывает существенное влияние на эксплуатационные показатели всей электростанции - экономические, экологические, качество электроэнергии и др.
Как заявлено, в диапазоне нагрузок синхронного дизель-генератора выше 35% номинальной БОСЭМ 12 его туроэлектронаддувочного агрегата 9-12 (фиг. 1) работает в генераторном режиме, утилизируя избыток энергии теплоты отработавших выхлопных газов в электрическую энергию (фиг. 5, б; кривая Рм мощности БОСЭМ). При этом электромашинный обратимый полупроводниковый преобразователь 15 (фиг. 1) ее статического полупроводникового преобразователя 14 работает, как описано, в режиме управляемого выпрямителя, а сетевой обратимый полупроводниковый преобразователь 16 того же СПП 14 - в режиме зависимого (ведомого сетью) инвертора. В отличие от генераторного режима БОСЭМ, представленного в способе-прототипе, в предлагаемом способе эта машина во всех нагрузочных режимах работает, как замечено выше, с постоянным (номинальным) потоком возбуждения, в чем и заключается принципиальное отличие предлагаемого способа. Регулирование электромагнитного момента и мощности БОСЭМ 12 в генераторном режиме производят исключительно за счет изменения углов управления силовыми транзисторами (не показаны) безинерционных сетевого 16 и электромашинного 15 обратимых полупроводниковых преобразователей СПП 14. За счет этого удается повысить быстродействие системы регулирования давления наддувочного воздуха в камерах сгорания первичного двигателя 2, приблизив его к быстродействию подачи топлива.
Информацию о том, что условия для работы БОСЭМ 12 в генераторном режиме созданы, посылают, как изложено, в виде единичного сигнала с выхода датчика 44 холостого хода и направления мощности на вход «3» субблока 31 задания режима блока 27 логического управления БОСЭМ 12. Причем, в период работы БОСЭМ 12 в двигательном режиме, т.е. когда синхронный ДГ 1-2 загружен статической мощностью менее 35% номинальной, значение сигнала на выходе «1» датчика 44 холостого хода и направления мощности будет противоположным, т.е. нулевым.
В зависимости от значения сигнала на входе «3» субблока 31 задания режима, последним по разному реагируют на сигналы производной наброса и сброса нагрузки на синхронный ДГ 1-2, посылаемые трехимпульсным электронным ПИД-регулятором 38 на его вход «5». Ниже описана работа системы регулирования давления наддувочного воздуха первичного двигателя 2 в динамических режимах наброса и сброса нагрузки, когда синхронный дизель-генератор 1-2 загружен статической мощностью более 35% номинальной.
3.1 Внезапный наброс нагрузки на синхронный дизель-генератор
При внезапном набросе активной мощности +ΔРG в момент времени t1 (фиг. 5, а; кривая PG мощности синхронного дизель-генератора) сигнал ее динамического приращения «dP/dt», формируемый трехимпульсным электронным ПИД-регулятором 38 (фиг. 1), с незначительным упреждением (по отношению к началу фактической подачи топлива) направляют на вход «b» блока 27 логического управления БОСЭМ 12, т.е. на регулятор давления наддувочного воздуха, и далее - на вход «5» субблока 31 задания режима (фиг. 2, фиг. 1). При появлении этого сигнала и при наличии единичного сигнала на его входе «3», данным субблоком задания режима 31 воздействуют реверсивными сигналами с его выходов «1» и «2» на входы «5» субблоков 33 и 32 управления генераторным и двигательным режимами БОСЭМ 12, блокируют тем самым работу субблока 33 управления генераторным режимом и передают БОСЭМ 12 под управление субблока 32 управления двигательным режимом. Последний своими сигналами на выходах «1» и «2» переводит БОСЭМ 12, посредством подсистем управления 18 к 17 управления соответственно сетевым 16 и электромашинным 15 обратимыми полупроводниковыми преобразователями СПП 14, практически мгновенно из генераторного в номинальный режим приводного вентильного электродвигателя (фиг. 5.б; кривая Рм). То есть сетевой обратимый полупроводниковый преобразователь 16 (фиг. 1, фиг. 2) сигналом с выхода «1» субблока 32 управления двигательным режимом переводят в режим управляемого выпрямителя, а электромашинный обратимый полупроводниковый преобразователь 15 сигналом с выхода «2» того же субблока 32 переводят в режим зависимого инвертора, ведомого сигналами датчика 50 положения ротора 20 БОСЭМ 12.
Выходной сигнал статического приращения мощности «ΔР» того же трехимпульсного электронного ПИД-регулятора 38 посылают на серводвигатель 6 одноимпульсного механогидравлического центробежного регулятора угловой скорости 5 для увеличения подачи gт топлива посредством перемещения топливной рейки 7 и ползунка потенциометра 8 с незначительной задержкой его подачи τз т (фиг. 5, а; кривая gт). Указанная задержка τз т вызвана инерционностью серводвигателя 6 и самого одноимпульсного МЦРУС 5. С увеличением подачи топлива восстанавливают за время tв2 (фиг.5, в) «просевшую» частоту вращения первичного двигателя 2 и, соответственно, частоту напряжения ƒ в электрической сети потребителя. Наряду с этим, под действием возросших параметров отработавшихлопных газов первичного двигателя 2 увеличивают вращающий момент, развиваемый утилизационной газовой турбиной 10.
Сигнал gт изменения подачи топлива, снимаемый с потенциометра 8 (фиг. 1), направляют на другой вход «а» блока 27 логического управления. Оба сигнала приращения - динамического «dP/dt» и статического «ΔР», преобразованного в сигнал gт, - суммируют посредством сумматора 29 (С) и направляют с его выхода на вход «4» субблока 32 управления двигательным режимом (фиг. 2) БОСЭМ 12. Этим сигналом, посланным на вход «4», посредством субблока 32 управления, уже обратившим к этому моменту времени БОСЭМ 12 в двигательный режим, устанавливают ее якорный ток и электромагнитный момент в промежутке t1-t2 (фиг. 5, б; кривая Рм) на уровне номинальных значений. Этого достигают тем, что посредством подсистем 18 и. 17 управления (фиг. 1) устанавливают углы а управления силовыми транзисторами обратимых полупроводниковых преобразователей 16 и 15 статического полупроводникового преобразователя 14 равными нулю, при которых напряжение Ud выпрямителя и инвертора в цепи постоянного тока последнего станет равным, согласно вышеприведенным выражениям для выпрямленных напряжений преобразователей, номинальному значению Udн.
Под согласованным действием двух возросших вращающих моментов, приложенных к валу 11 ТЭНА 9-12 (газовой турбины 10 и электромагнитного двигательного момента, развиваемого БОСЭМ 12), быстро увеличивают в промежутке t1-t3 частоту вращения nк (фиг. 5, б; кривая nк) и производительность турбоэлектрокомпрессора 9 (фиг. 1). Тем самым, практически синхронно с увеличением подачи топлива поднимают и давление наддувочного воздуха в цилиндрах первичного двигателя 2 (фиг. 5, б; кривая рв). Значения этого давления и частоты вращения турбоэлектрокомпрессора 9 (фиг. 1) измеряют соответственно датчиком 40 давления и датчиком 41 частоты вращения. Сигнал датчика 41 частоты вращения направляют на вход «2» субблока 33 управления генераторным режимом блока 27 логического управления, а сигнал датчика 40 давления воздуха направляют на входы «1» его субблока 31 задания режима (фиг. 2) и субблоков 32 и 33 управления соответственно двигательным и генераторным режимами БОСЭМ 12. В момент времени t2 (фиг. 5), когда возрастающий сигнал давления воздуха становится равным оптимальному значению ропт2 (фиг. 5, б; кривая рв), хранимому в памяти этих субблоков для нового нагрузочного режима синхронного ДГ 1-2, информацию о котором в данный момент с выхода «Р» трехимпульсного электронного ПИД-регулятора 38 посылают на входы «6» данных субблоков 31, 32 и 33 блока 27 управления БОСЭМ 12, реверсивными сигналами субблока 31 задания режима блокируют работу субблока 32 управления двигательным режимом, а управление БОСЭМ 12 передают субблоку 33 управления генераторным режимом. Последний, воздействуя своим сигналом с выхода «2» на вход «4» подсистемы 17 управления, возвращает электромашинный обратимый полупроводниковый преобразователь 15 в предшествующий режим управляемого выпрямителя, а воздействуя своим сигналом с выхода «1» на вход «4» подсистемы 18 управления, возвращает сетевой обратимый полупроводниковый преобразователь 16 в предшествующий режим зависимого (ведомого сетью) инвертора. Этими операциями, в итоге, в момент времени t2 (фиг. 5, б; кривая Рм) возвращают БОСЭМ 12 в предшествующий генераторный режим с генерируемой мощностью Рм1.
В процессе данного перехода на более высокий уровень частоты вращения nк, турбо-электрокомпрессор 9 запасает дополнительную кинетическую энергию, вследствие чего под ее действием ТЭНА 9-12 в промежутке t3-t4 попадает по инерции в область перерегулирования частоты вращения турбоэлектрокомпрессора 9 и давления наддувочного воздуха. Сигналами перерегулирования этих параметров, формируемыми на выходах «1» и «2» субблока 33, как обратными связями, воздействуют на входы подсистем 17 и 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями, возвратившимися в исходные (до наброса нагрузки) режимы, регулируя их углы α управления. Тем самым, посредством изменения углов α управления силовыми транзисторами этих преобразователей, увеличивают напряжение Ud в цепи постоянного тока, генерируемую мощность БОСЭМ 12 до ее значения Рм2 (фиг. 5,б; кривая Рм), ее якорный ток и электромагнитный тормозной момент на общем валу 11 ТЭНА 9-12 пропорционально возросшей статической нагрузке дизель-генератора (фиг. 1). За счет возросшего тормозного момента вал 11 турбоэлектрокомпрессора 10 притормаживают до значения nк oпт2 (фиг. 5, б; кривая nк), и соответственно давление наддувочного воздуха понижают до требуемой оптимальной величины рв опт2 (фиг. 5, б; кривая рв) для нового нагрузочного режима синхронного ДГ 1-2.
На этом переходный процесс наброса активной мощности на синхронный ДГ 1-2, работающий в диапазоне статических нагрузок свыше 35% номинальной, завершают.
3.1 Внезапный сброс нагрузки с синхронного дизель-генератора
При внезапном сбросе активной мощности -ΔPG (фиг. 6, а) в момент t1, например, при отключении крупного электропривода, на валу синхронного ДГ 1-2 (фиг. 1) кратковременно образуется избыток вращающего момента, под действием которого происходит всплеск частоты вращения +Δn (не показано) генератора 1 и частоты напряжения +Δƒ (фиг. 6, в) в электросети потребителя. В этих условиях необходимо быстро ограничить подачу топлива и по возможности синхронно, учитывая инерционность ТЭНА 9-12, уменьшить давление наддувочного воздуха за счет сброса частоты вращения и производительности турбоэлектрокомпрессора 9, для чего скачком увеличивают на первом этапе (период t1-t3) переходного процесса тормозной электромагнитный момент БОСЭМ 12 до наибольшего (располагаемого) на текущий момент значения Рм рас (фиг. 6, б; кривая Рм), определяемого текущей частотой вращения этой машины.
Для этого в момент t1 сброса нагрузки (фиг. 6, а; кривая РG мощности синхронного ДГ) сигнал «-dP/dt» производной уменьшения мощности с отрицательным знаком, формируемый трехимпульсным электронным ПИД-регулятором 38 (фиг. 1, фиг. 2) и посылаемый в блок 27 логического управления, направляют, как и при набросе нагрузки, на вход «5» субблока 31 задания режима. Однако при единичном сигнале, посылаемом на вход «3» субблока 31 задания режима с выхода датчика 44 холостого хода и направления мощности БОСЭМ 12 в период загрузки синхронного ДГ 1-2 мощностью, превышающей значение 35% номинальной, действие сигнала «-dP/dt» отрицательной полярности используют для сохранения ее предшествующего, т.е. генераторного, режима работы. А тем же сигналом производной «-dP/dt», направленным через сумматор 29 на вход «4» субблока 33 управления генераторным режимом БОСЭМ 12, в момент времени увеличивают скачком ее мощность (и электромагнитный тормозной момент на общем валу 11 ТЭНА 9-12) со значения Рм1 до располагаемого значения Рм рас (фиг. 6, б; кривая Рм мощности), определяемого текущей частотой вращения nк1. Для этого субблоком 33 управления генераторным режимом БОСЭМ 12 (фиг. 1, фиг. 2), в данный момент сигналами с его выходов «2» и «1», скачком изменяют напряжения управления на входах «4» подсистем 17 и 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями, и также скачком увеличивают, за счет изменения углов а управления силовыми транзисторами последних, напряжение Ud в цепи постоянного тока СПП 14, а следовательно, и якорный ток БОСЭМ 12. При этом в этот же момент посредством встроенного в нее шунта 52 измеряют значение постоянного тока в цепи СПП 14, и посылают с него пропорциональный этому току сигнал на вход «4» субблока 34 торможения блока 27 логического управление БОСЭМ 12, в котором сравнивают его с программно заданным в нем значением (номинальным) тока Id н. Если измеренное значение сигнала окажется менее заданного, на выходе «4» субблока 34 торможения формируют сигнал включения вспомогательного контактора динамического торможения (не показан), и его замыкающим контактом 46 включают в цепь постоянного тока СПП 14 параллельно его обратимым электромашинному и сетевому полупроводниковым преобразователям 15 и 16 резистор 47 динамического торможения. Включением резистора 47 динамического торможения увеличивают до номинальных значений якорный ток БОСЭМ 12 и тормозной электромагнитный момент, развиваемый ею на общем валу 11 ТЭНА 9-12.
Вслед за этим статическим сигналом приращения «-ΔР», посылаемым трехимпульсным электронным ПИД-регулятором на серводвигатель 6 одноимпульсного МЦРУС 5, уменьшают посредством топливной рейки 7 подачу топлива и, вызывая при этом перемещение ползунка потенциометра 8, преобразуют его в сигнал gт уменьшения подачи топлива, благодаря чему восстанавливают за время tв (фиг. 6, в) частоту вращения nд синхронного ДГ 1-2 и частоту напряжения ƒ в электросети до предшествующих, номинальных значений. Воздействуют сигналом gт изменения подачи топлива через другой вход сумматора 29 (фиг. 1, фиг. 2) на тот же вход «4» субблока 33 управления генераторным режимом БОСЭМ 12 и сохраняют на первом этапе переходного процесса (в промежутке t1-t3) тормозной характер и значение его электромагнитного момента, установленного сигналом производной «-dP/dt».
Вследствие возросшего скачком тормозного электромагнитного момента БОСЭМ 12 и снижения вращающего момента, развиваемого утилизационной турбиной 10 по причине уменьшения расхода и параметров отработавших газов первичного двигателя 2, обусловленных уменьшением подачи топлива в его камеры сгорания, затормаживают на первом этапе переходного процесса вал 11 ТЭНА 9-12 (фиг. 6, б; кривая nк), снижают производительность турбэлектрокомпрессора 9 и сбрасывают давление наддувочного воздуха (фиг. 6, б; кривая рв) в камерах сгорания дизеля 2 практически синхронно с уменьшением подачи топлива gт (фиг. 6, а; кривая gт). А высвобождающуюся при этом часть кинетической энергии, накопленной вращающимся ротором ТЭНА 9-12 (фиг. 1) при прежней частоте вращения nк1, преобразуют в электрическую энергию и направляют по цепи питания БОСЭМ 12 через автоматический выключатель 13 в электрическую сеть потребителя.
Измеряют понижающиеся значения частоты вращения nк турбоэлектрокомпрессора 9 (фиг. 6, б; фиг. 1) и давления наддувочного воздуха рв в воздушном коллекторе соответственно датчиком 41 частоты вращения и датчиком 40 давления. Измеренный сигнал частоты вращения турбоэлектрокомпрессора посылают на вход «2» субблока 34 торможения. Также посылают данные измеренные сигналы частоты вращения турбоэлектрокомпрессора и давления наддувочного воздуха соответственно на входы «2» и «1» сублока 33 управления (фиг. 2) генераторным режимом БОСЭМ 12, посредством которого сравнивают текущие значения этих измеренных сигналов с их оптимальными значениями, хранимыми в памяти указанного субблока 33 для нового статического нагрузочного режима ДГ 1-2, информацию о котором предварительно посылают, как изложено, на вход «б» того же субблока 33 с выхода «Р» трехимпульсного электронного ПИД-регулятора 38. В момент времени t3 (фиг. 6, б; кривая рв), когда измеренное понизившееся значение сигнала давления наддувочного воздуха рв становится в воздушном коллекторе равным оптимальному рв опт2, на выходах «1» и «2» субблока 33 управления генераторным режимом (фиг. 2) формируют сигналы возврата БОСЭМ 12 в предшествующий генераторный режим с прежней генерируемой мощностью Рм1 (фиг. 6, б; кривая Рм) и посылают эти сигналы на входы «4» подсистем 17 и 18 управления (фиг. 2, фиг. 1) соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями. Подсистемами 17 и 18 управления устанавливают прежние значения углов α управления силовыми транзисторами данных обратимых полупроводниковых преобразователей и соответственно прежнее значение напряжения Ud в цепи постоянного тока СПП 14. А в тот же момент времени t3, когда измеренное значение сигнала частоты вращения nк турбоэлектрокомпрессора 9, посылаемого, как отмечено, на вход «2» субблока 34 торможения (фиг. 6, б; кривая nк, фиг. 2), становится равным оптимальному nк опт2, с выхода «4» данного субблока 34 посылают сигнал размыкания контакта 46 вспомогательного контактора.
В период сброса частоты вращения ТЭНА 9-12 на первом этапе переходного процесса накапливают его вращающимся ротором кинетическую энергию замедления, и по инерции попадают в следующий промежутке времени t3-t4 (фиг. 6, б; кривые nк и рв) в область перерегулирования контролируемых параметров турбоэлектрокомпрессора 9 (фиг. 1), а именно: частоты вращения nк и давления наддувочного воздуха рв в воздушном коллекторе ТЭНА 9-12. Тогда, на втором этапе переходного процесса сигналами перерегулирования давления наддувочного воздуха (pв<pв опт2), формируемыми на выходах «2» и «1» (фиг. 2) субблока 33 управления генераторным режимом БОСЭМ 12, воздействуют соответственно на подсистемы 17 и 18 управления соответственно электромашинным 15 и сетевым 16 полупроводниковыми преобразователями преобразователями, регулируя их углы α управления, и понижают напряжение Ud в цепи постоянного тока СПП 14, генерируемую мощность Рм БОСЭМ 12 (фиг. 6, б; кривая Рм) и ее тормозной электромагнитный момент до тех пор, пока частота вращения nк турбоэлектрокомпрессора 9 и давление наддувочного воздуха рв не примут оптимальные значения соответственно nк опт2 и pв опт2 (фиг. 6, б; кривые nк и рв) для нового статического нагрузочного режима синхронного ДГ 1-2. При этом новое значение генерируемой мощности Рм2 в установившемся режиме (t>t4) устанавливают меньше мощности Pм1 предшествующего режима, так как расход и параметры отработавших выхлопных газов дизеля (давление, температура), направляемые на лопатки утилизационной газовой турбины 10 (фиг. 1), как и энергия их теплоты, после сброса нагрузки и уменьшения подачи топлива в первичный двигатель 2 снижаются по окончании перехода синхронного ДГ 1-2 в новый установившийся режим.
На этом переходный процесс при сбросе активной мощности на синхронный дизель-генератор 1-2, работающий в диапазоне статических нагрузок свыше 35% номинальной, завершают.
4 Управление давлением наддува по программе вывода синхронного дизель-генератора из работы
Предварительные пояснения. При выполнении подсистемой 39 ДАУ (фиг. 1) подпрограммы нормальной остановки синхронного дизель-генератора по способу-прототипу, на предварительно разгруженный и отключенный от шин 3 ГРЩ синхронный ДГ 1-2 после его непродолжительной работы на холостом ходу посылают на его подсистему 39 ДАУ команду «Стоп». По этой команде на первичном двигателе 2 по известному решению прекращают подачу топлива в камеры сгорания и одновременно останавливают ТЭНА 9-12 за счет перевода его БОСЭМ 12 в режим электрического торможения: сначала генераторного (рекуперативного), а затем и динамического. Необходимость остановка ТЭНА 9-12, выполняемой синхронно с остановкой первичного двигателя 2, вызывается в способе-прототипе соображениями безаварийной эксплуатации его подшипников, оборудованных, как известно из способа-прототипа, жидкостной смазкой, объединенной с системой смазки самого первичного двигателя 2 синхронного ДГ 1-2. Поэтому после остановки такого первичного двигателя 2 и его навешенного масляного насоса (не показан), ТЭНА 9-12, накопивший при своем вращении значительное количество кинетической энергии, еще долгое время продолжает вращаться по инерции при резко снизившемся давлении в системе смазки.
Но, с другой стороны, синхронная остановка дизель-генератора и его БОСЭМ 12 по способу-прототипу вызывает на разогретых до сотен градусов Цельсия лопатках остановленной утилизационной газовой турбины 10 резкий перепад температур, способный вызвать в них опасные температурные перенапряжения.
Заявляемый способ основан, как описано, на использовании в конструкции быстроходного ТЭНА 9-12 воздушных подшипников, в жидкостной смазке не нуждающихся. Поэтому при нормальных остановках синхронного дизель-генератора 1-2 необходимость в остановке агрегата наддува, синхронизированной с остановкой первичного двигателя 2, отпадает, тогда как его относительно продолжительный инерционный выбег способствует плавно-замедленному охлаждению лопаток за счет их трения о воздух, исключающий возникновение в их материале температурных перенапряжений. Ниже рассмотрены предлагаемые способы остановок синхронного ДГ 1-2 в двух режимах: а) при штатном выводе из параллельной работы и нормальной остановке одного из генераторных агрегатов; и б) при аварийной остановке синхронного дизель-генератора в случае превышения его первичным двигателем 2 предельно допустимой частоты вращения.
4.1 Вывод дизель-генератора из параллельной работы с нормальной остановкой
Нормальную остановку синхронного ДГ 1-2 (фиг. 1) в период его параллельной работы производят по команде «Стоп ДГ», подаваемой на вход «4» подсистемы 39 ДАУ данным дизель-генератором в момент времени t0 (фиг. 7, принятые здесь обозначения означают: Рс, РДГ, РБОСЭМ - мощности, развиваемые соответственно сетевым источником, выводимым из работы дизель-генератором и его бустерной обратимой синхронной электрической машиной; Рн - номинальная мощность выводимого из работы синхронного ДГ; nд, nк - частоты вращения соответственно выводимого синхронного ДГ и его турбоэлектрокомпрессора). Программой нормальной остановки дизель-генератора предусматривают, как известно, плавный перевод нагрузки с выводимого из работы синхронного ДГ 1-2 (фиг. 1) на остающийся в работе сетевой генераторный агрегат (не показан), нагруженных предварительно равными мощностями Рдг и Рс (например, 45% номинальной, на фиг. 7), при которых БОСЭМ 12 турбоэлектронаддувочных агрегатов обоих первичных двигателей работают, как показано выше, в этом случае в генераторных режимах. Для этого по сигналу согласно данной программе подсистемы 39 ДАУ выводимым синхронным ДГ1-2, посылаемому с ее выхода «1» в его трехимпульсный электронный ПИД-регулятор 38 подачи топлива (не показано), на выходе «ΔР» последнего формируют непрерывный сигнал «- ΔР» понижения подачи топлива, монотонно убывающий одновременно со снижением нагрузки на выводимом из работы синхронном ДГ 1-2, который направляют, во-первых, на серводвигатель 6 одноимпульсного механогидравлического центробежного регулятора 5 угловой скорости первичного двигателя 2, посредством которого перемещают замедленно топливную рейку 7 и потенциометр 8 и уменьшают замедленно подачу топлива gт на синхронном ДГ 1-2, а вместе с этим и развиваемую им мощность (фиг. 7, кривая Рдг) при сохранении неизменной его частоты вращения nд н (фиг. 7, кривая nд). При этом сигнал «dP/dt» на другом выходе трехимпульсного электронного ПИД-регулятора 38 (фиг. 1) при замедленном снижении нагрузки на выводимом из работы синхронном ДГ 1-2 согласно данной программе не формируют, и в блок 27 логического управления БОСЭМ 12 он не поступает.
По мере плавно-замедленного уменьшения мощности Рдг, развиваемой выводимом из работы синхронным ДГ 1-2, снижают расход и параметры его отработавших газов, а следовательно, и вращающий момент, развиваемый его утилизационной газовой турбиной 10. Чтобы «погасить» кинетическую энергию, накопленную вращающимся ротором ТЭНА 9-12, преобразовать ее в электрическую энергию и направить в сеть потребителя через СПП 14 и автоматический выключатель 13, используют данный сигнал «- ΔР» трехимпульсного электронного ПИД-регулятора 38, преобразованный на потенциометре 8 в сигнал gт снижения подачи топлива и посылаемый на сумматор 29 блока 27 логического управления БОСЭМ 12. Сигналом, формируемым на выходе сумматора 29, воздействуют на вход «4» субблока 33 управления генераторным режимом (фиг. 2) выводимого дизель-генератора, работающего при данной достаточно высокой мощности, того же блока 27 логического управления, сохраняя работу БОСЭМ 12 в промежутке времени t0-t1 (фиг. 7) в тормозном режиме при номинальном потоке возбуждения, создаваемом в нем постоянными магнитами 19 (фиг. 1). Благодаря этому уменьшают частоту вращения турбоэлектрокомпрессора 9 (фиг. 7, кривая nк), его производительность, расход и давление наддувочного воздуха практически синхронно с уменьшением подачи топлива, т.е. без запаздывания.
По мере снижения частоты вращения nк, пропорционально ей уменьшают и развиваемую БОСЭМ 12 мощность РБОСЭМ, так что в момент времени t1 (фиг. 7), когда мощность самого выводимого синхронного ДГ 1-2 становится равной и меньше 35% номинальной, т.е. когда утилизационная газовая турбина 10 (фиг. 1) самостоятельно уже не в состоянии обеспечить производительность турбоэлектрокомпрессора 9 для подачи наддувочного воздуха с оптимальными значениями расхода и давления, БОСЭМ 12 в этот момент времени переводят, ранее описанным путем, из генераторного режима в режим приводного вентильного электродвигателя по сигналу, инвертируемому на выходе датчика 44 холостого хода и направления мощности машины из единичного значения в нулевое, который посылают на вход «5» субблока 31 задания режима (фиг. 2) данной БОСЭМ 12.
В промежутке времени t1-t2 (фиг. 7, кривая РБОСЭМ), для поддержания оптимальных значений производительности турбоэлектрокомпрессора 9 при малых значениях нагрузки на выводимом синхронном ДГ 1-2, соответствующих диапазону 35-15% номинальной, мощность БОСЭМ 12 и развиваемый ею двигательный электромагнитный момент увеличивают обратно пропорционально текущим значениям сигнала «Р» фактической, понижающейся мощности на выводимом синхронном ДГ 1-2, посылаемого трехимпульсным электронным ПИД-регулятором 38 (фиг. 1) на вход «6» субблока 32 управления двигательным режимом (фиг. 2) БОСЭМ 12, увеличивающего данный двигательный электромагнитный момент.
Кода же в промежутке времени t2-t3 (фиг. 7, кривая РДГ) понижающаяся мощность выводимого синхронного ДГ 1-2 снизится до 15% номинальной и ниже, то, чтобы сохранить значения производительности турбоэлектрокомпрессора 9 (фиг. 1, фиг. 2) оптимальными и в этом диапазоне нагрузок на выводимом синхронном ДГ 1-2, двигательный электромагнитный момент его БОСЭМ 12 по сигналу обратной связи, формируемому датчиком 40 давления наддувочного воздуха и направляемому на вход «1» субблока 32 управления двигательным режимом БОСЭМ 12, изменяют (уменьшают) прямо пропорционально сигналу «Р» убывающей фактической мощности РДГ выводимого из работы синхронного дизель-генератора 1-2, формируемому трехимпульсным электронным ПИД-регулятором 38 и посылаемому на тот же вход «6» субблока 32 управления двигательным режимом, уменьшающего данный двигательный электромагнитный момент БОСЭМ.
В момент времени t3 (фиг. 7), когда нагрузка на выводимом синхронном ДГ 1-2 становится равной нулю, на выходе «Р» его трехимпульсного электронного ПИД-регулятора 38 (фиг. 1) формируют сигнал ноль, который посылают по стрелке «А» на вход «5» подсистемы 39 ДАУ синхронным ДГ 1-2. По этому сигналу на выходе «5» подсистемы 39 ДАУ в данный момент t3 формируют команду выключения генераторного автоматического выключателя 4 и исполняют ее. Сигнал выключения генераторного автоматического выключателя 4 через его замыкающий блок-контакт 49 посылают по стрелке «Б» на вход «6» той же подсистемы 39 ДАУ. Последняя на своем выходе «1» формирует команду понижения частоты вращения у первичного двигателя 2 до значения холостого хода nд хх, равного 90% номинального, а с выхода «6» подсистемы - сигнал «Торможение» БОСЭМ 12. Первую команду посылают (не показано) на серводвигатель 6 его одноимпульсного МЦРУС 5. Перемещают серводвигателем 6 топливную рейку 7 и ползунок потенциометра 8, чем дополнительно уменьшают подачу топлива отключенного синхронного ДГ 1-2 и устанавливают частоту вращения его первичного двигателя 2 на уровне холостого хода nд хх (фиг. 7, кривая nд). Второй сигнал - «Торможение» - посылают на вход «3» субблока 34 торможения БОСЭМ 12 (фиг. 1, фиг. 2), воздействуют его сигналами на выходах «1» и «2» на входы «2» подсистем 17 и 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями СПП 14, чем переводят в данный момент времени t3 БОСЭМ 12 известным путем в генераторный режим при наибольшей располагаемой мощности для ее текущей частоты вращения. Последнюю операцию выполняют, чтобы, притормозив вал 11 ТЭНА 9-12, привести снижающуюся частоту вращения nк турбоэлектрокомпрессора 9, его производительность и параметры наддувочного воздуха в соответствие с понижаемой до значения холостого хода nд хх подачей топлива в камеры сгорания первичного двигателя 2.
Измеряют понижающиеся до значения холостого хода частоты вращения выводимого из работы синхронного ДГ 1-2 и турбоэлектрокомпрессора 9 датчиками соответственно 43 и 41 частоты вращения. По сигналу nд хх датчика 43, приходящему на вход «7» подсистемы 39 ДАУ, дальнейшее снижение частоты вращения первичного двигателя 2 прекращают, а сигналом nк хх датчика 41, посылаемым на вход «2» субблока 34 торможения (фиг. 2) и пересылаемым последним на входы «2» подсистем 17 к 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями, возвращают в момент времени t4 (фиг. 7) описанным выше путем БОСЭМ 12 в предшествующий режим приводного вентильного электродвигателя (кривая РБОСЭМ), но уже с частотой вращения nк хх. А сигналом gт (фиг. 1, фиг. 2) подачи топлива в режиме холостого хода выводимого синхронного ДГ 1-2, снимаемым с потенциометра 8 и направляемым через сумматор 29 на вход «4» субблока 32 управления двигательным режимом БОСЭМ 12, устанавливают конкретные значения углов α управления силовыми транзисторами названных электромашинного 15 и сетевого 16 обратимых полупроводниковых преобразователей, которые создают потребный для режима холостого хода выводимого из работы синхронного ДГ 1-2 двигательный электромагнитный момент БОСЭМ 12 и частоту вращения ТЭНА 9-12, соответствующую полноценному воздухоснабжению в этом режиме. Расход, давление и коэффициент избытка наддувочного воздуха при частоте вращения турбоэлектрокомпрессора 9, равной nк хх, соответствуют оптимальным значениям для данного режима холостого хода первичного двигателя 2, гарантирующим полное, без дымления сгорание топлива. По этой причине продолжительность периода t4-t5 (фиг. 7) работы последнего в данном режиме холостого хода может быть многократно большей, чем рекомендована для первичного двигателя 2 с традиционным ТКСН, а следовательно, будет более замедленным процесс понижения температур нагретых деталей выводимого из работы синхронного ДГ 1-2, как условие для продления его срока службы.
В промежутке времени t4-t5 выводимый из работы синхронный ДГ 1-2, отключенный от шин 3 ГРЩ, работает на холостом ходу при пониженных оборотах nд хх, а его ТЭНА 9-12 вращается при частоте nк хх, поддерживаемой, в основном, за счет работы БОСЭМ 12 в режиме приводного вентильного электродвигателя. В момент времени t5 посредством подсистемы 39 ДАУ синхронным дизель-генератором 1-2 (фиг. 1) посылают, согласно программе, с ее того же выхода «1» сигнал остановки на электромагнит (не показан) остановки, которым прекращают подачу топлива, и первичный двигатель 2 останавливают к моменту времени t6 (фиг. 7, фиг. 1). Одновременно, согласно нее же, в момент времени t5 с выхода «7» подсистемы 39 ДАУ выводимым из работы синхронным дизель-генератором 1-2 посылают сигнал выключения автоматического выключателя 13, снимая питание со всех цепей СПП 14 и устанавливая мощность РБОСЭМ и электромагнитный момент БОСЭМ 12 на нулевом уровне. После этого в промежутке t5-t7 турбоэлектронаддувочный агрегат 9-12 оставляют вращаться в режиме свободного выбега, чтобы, как указано выше, обеспечить плавно-замедленное понижение температуры рабочих колес утилизационной турбины 10 и турбоэлектрокомпрессора 9, исключающее возникновение температурных перенапряжений.
На этом вывод синхронного ДГ 1-2 из параллельной работы с нормальной остановкой заканчивают. Таким образом осуществляется при нормальной его остановке режим свободного выбега, исключающего возникновение, что существенно, температурных перенапряжений.
4.2 Программа экстренной остановки синхронного дизель-генератора в нештатной ситуации
При выполнении подпрограммы защиты от превышения частоты вращения (разноса) дизеля (сверхкритическая неисправность), в известных способах его экстренных остановок одновременно с прекращением подачи топлива прекращают и подачу наддувочного воздуха в камеры сгорания посредством известной воздушной заслонки, установленной во впускной полости турбокомпрессора наддува, в том числе и в заявляемом способе (не показана). Такие действия, как правило, вызывают явление помпажа турбокомпрессора -режима, опасного для всего турбонаддувочного агрегата. В заявляемом способе адаптивного автоматического регулирования давления наддувочного воздуха в этой нештатной ситуации немедленную остановку агрегата наддува, как защитное мероприятие от его помпажа, выполняют по тому же методу, что и в способе-прототипе, а именно путем экстренного электрического торможения.
Метод экстренной остановки синхронного ДГ 1-2 с данным электрическим торможением ТЭНА 9-12 осуществляют процедурой со следующей последовательностью.
При поступлении в момент времени t0 (фиг. 8) на вход «1» подсистемы 39 ДАУ (фиг. 1) синхронным дизель-генератором 1-2 сверхкритического сигнала о превышении допустимой частоты его вращения («Разнос дизеля»), с ее выхода «5» посылают без выдержки времени сигнал отключения от шин 3 синхронного генератора 1, оказавшегося в аварийном режиме, посредством автоматического выключателя 4 без его предварительной разгрузки. После выключения последнего через его размыкающий блок- контакт 49 посылают по стрелке «Б» в подсистему 39 ДАУ сигнал, по которому посредством этой подсистемы с ее выхода «1» воздействуют одновременно и без выдержки времени на электромагнит остановки (не показан) первичного двигателя 2, чем прекращают подачу топлива в камеры сгорания этого двигателя, а также и на воздушную заслонку (не показана), установленную во впускной полости турбоэлектрокомпрессора 9, и перекрывают этим поступление воздуха в те же камеры сгорания первичного двигателя 2. За счет этого дизель 2 немедленно останавливают (фиг. 8, а, б), и подачу потока выхлопных газов к утилизационной газовой турбине 10 прекращают.
Во избежание попадания турбоэлектрокомпрессора 9, продолжающего вращаться по инерции, в режим помпажа из-за резкого перепада давлений воздуха на его входе и выходе (из-за закрытия воздушной заслонки), одновременно с принятыми мерами по остановке синхронного ДГ 1-2 с выхода «3» той же подсистемы 39 ДАУ посылают в данный момент сигнал торможения на вход «1» (фиг. 2, фиг 1) субблока 34 (СБТ) торможения блока 27 логического управления БОСЭМ 12, а выходными сигналами с выходов «2» и «1» данного субблока 34 (СБТ) торможения воздействуют непосредственно на входы «2» подсистем 17 и 18 управления соответственно электромашинным 15 и сетевым 16 обратимыми полупроводниковыми преобразователями СПП 14. При этом у отключенного от шин 3 ГРЩ и остановленного синхронного ДГ 1-2 переводят в данный момент его БОСЭМ 12, посредством этих подсистем 17 и 18, тем же путем, что описан выше, в режим генераторного (т.е. рекуперативного) торможения (фиг. 8, в) при номинальном значении магнитного потока возбуждения, создаваемого постоянными магнитами 19, и напряжении БОСЭМ 12, пропорциональном текущей частоте вращения ТЭНА 9-12. Поэтому на валу 11 последнего создают тормозной электромагнитный момент Мм г, располагаемое значение которого зависит от текущей частоты вращения и мощности Рм рас БОСЭМ 12. Под действием этого тормозного электромагнитного момента Мы г частота вращения nк ТЭНА 9-12 (фиг. 8. г), которую измеряют датчиком 41 частоты вращения, в промежутке t0 - t1=τм г быстро падает. Сигнал этой частоты вращения непрерывно посылают на вход «2» субблока 34 (СБТ) торможения (фиг. 2, фиг. 1).
По мере данного снижения частоты nк вращения ТЭНА 9-12, а также и БОСЭМ 12 (фиг. 8, г), в данном промежутке быстро снижается генерируемая мощность Рм г последней (фиг. 8, в) и ее тормозной электромагнитный момент Мм г, который вскоре становится малоэффективным. Поэтому при снижении частоты вращения nк. ТЭНА 9-12, сигнал которой посылают в субблок 34 торможения (СБТ), до программно заданного в этом же субблоке 34 торможения значения nк дин (фиг. 8, г), соответствующего началу динамического торможения БОСЭМ 12, сигналом с выхода «4» данного субблока 34 замыкают в момент времени t1 замыкающий контакт 46 вспомогательного контактора (не показан) динамического торможения, и включают в цепь постоянного тока СПП 14 динамический резистор 47. Одновременно с этим, сигналом с выхода «2» субблока торможения 34, прекращают генерацию управляющих импульсов (не показано) подсистемой 18 для силовых транзисторов сетевого обратимого преобразователя 16 (UZ2). Этими действиями увеличивают ток в цепи постоянного тока СПП 14 и соответственно действующий динамический тормозной момент Мм дин БОСЭМ 12, так что с момента t1 в промежутке времени τм д (фиг. 8, в, г) ее остановку продолжают уже в режиме установленного динамического торможения. Когда сигнал снижающейся частоты вращения nк турбоэлектронаддувочного агрегата 9-12, непрерывно посылаемый на вход «2» субблока 34 (СБТ) торможения, станет равным нулю, то нулевым же сигналом на выходе «4» этого субблока 34 (СБТ) размыкают упомянутый контакт 46 вспомогательного контактора, а единичным сигналом на его выходе «3» того же субблока 34 (СБТ) - и автоматический выключатель 13 (QF2), снимая питание со всех цепей БОСЭМ 12.
На этом программу защиты синхронного ДГ 1-2 от «разноса» с экстренной остановкой первичного двигателя 2 и принудительным торможением турбоэлектронаддувочного агрегата 9-12 заканчивают.
Аварийную остановку синхронного ДГ 1-2 по другим сигналам критических неисправностей, например, при предельно низком снижении давления в его системе смазки (более распространенной неисправности), также выполняют без предварительной разгрузки генератора путем выключения без задержки генераторного автоматического выключателя 4 и прекращения известным путем, тоже без задержки подачи топлива в камеры сгорания первичного двигателя 2. Однако перекрытие подачи наддувочного воздуха воздушной заслонкой и указанную процедуру принудительной остановки последнего методом электрического торможения, посредством бустерной обратимой синхронной электрической машины, в алгоритме аварийной остановки синхронного ДГ 1-2 в этом случае блокируют, не предусматривают, сохраняя ее лишь для случая защиты первичного двигателя от предельной частоты вращения - «разноса», так что опасности возникновения помпажа ТЭНА 9-12 это не вызывает. Поэтому быстрая остановка последнего в этом нештатном режиме не требуется. Его останавливают, как и при нормальной остановке, в режиме свободного выбега, исключающего возникновение температурных перенапряжений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ НАПРЯЖЕНИЯ, ПРОГРАММИРОВАНИЯ И РАСПРЕДЕЛЕНИЯ АКТИВНОЙ НАГРУЗКИ МЕЖДУ РАЗНОТИПНЫМИ ИСТОЧНИКАМИ ЭЛЕКТРОЭНЕРГИИ СУДНА | 2019 |
|
RU2753704C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2013 |
|
RU2535768C1 |
| Способ повышения эффективности судовой электростанции | 2022 |
|
RU2784445C1 |
| Управляющее устройство для двигателя внутреннего сгорания с турбокомпрессором | 1985 |
|
SU1382408A3 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2493047C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2011 |
|
RU2483972C1 |
| СПОСОБ РАЗГОНА ГЛИССИРУЮЩЕГО СУДНА | 2019 |
|
RU2716514C1 |
| АВТОНОМНАЯ СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОСНАБЖЕНИЯ, ИСПОЛЬЗУЮЩАЯ ВОЗОБНОВЛЯЕМЫЙ ИСТОЧНИК ЭНЕРГИИ | 2004 |
|
RU2262790C1 |
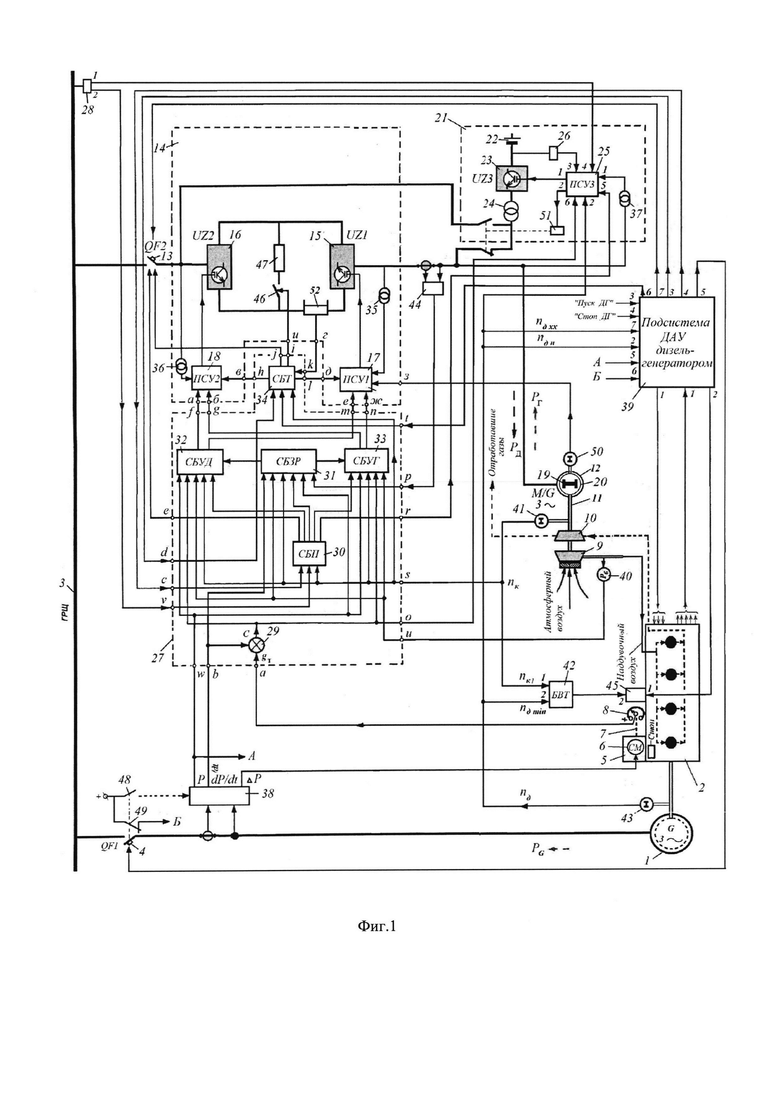
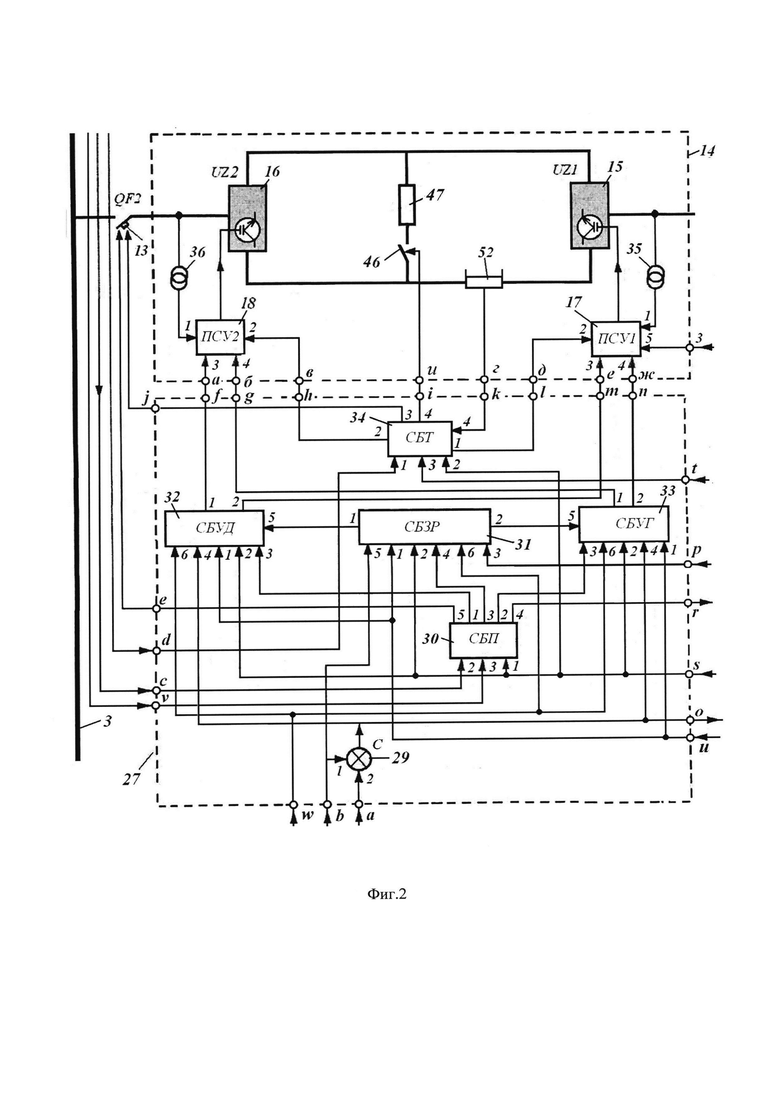
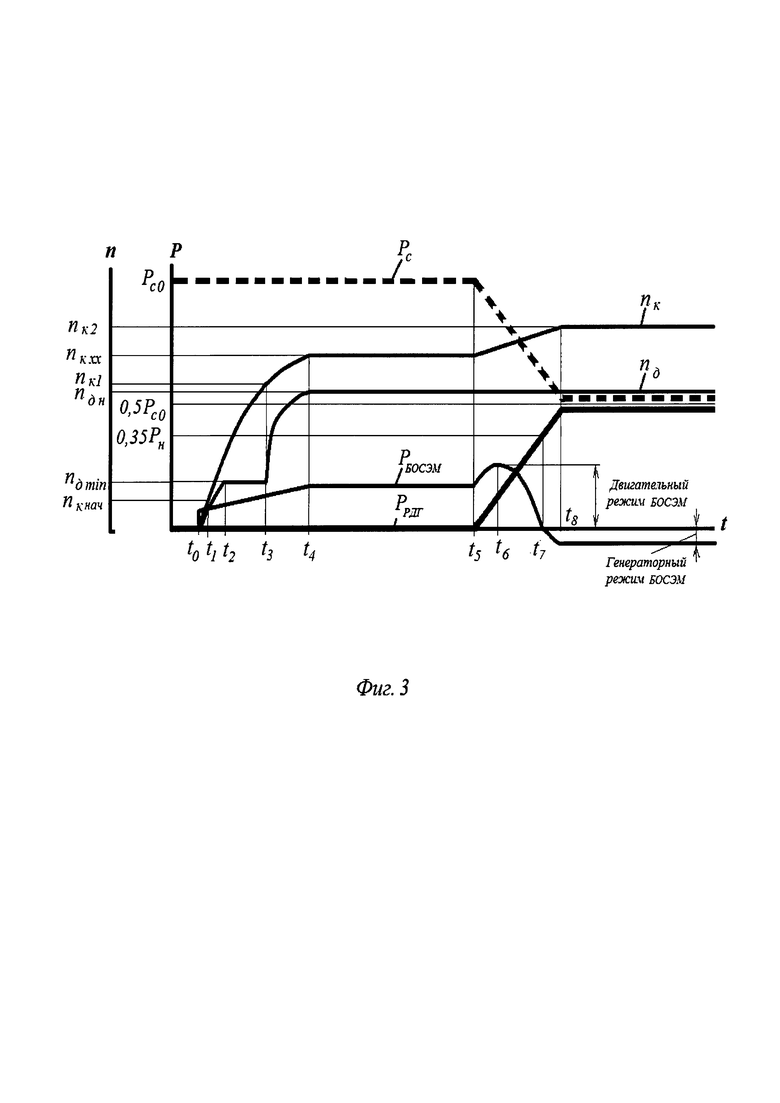
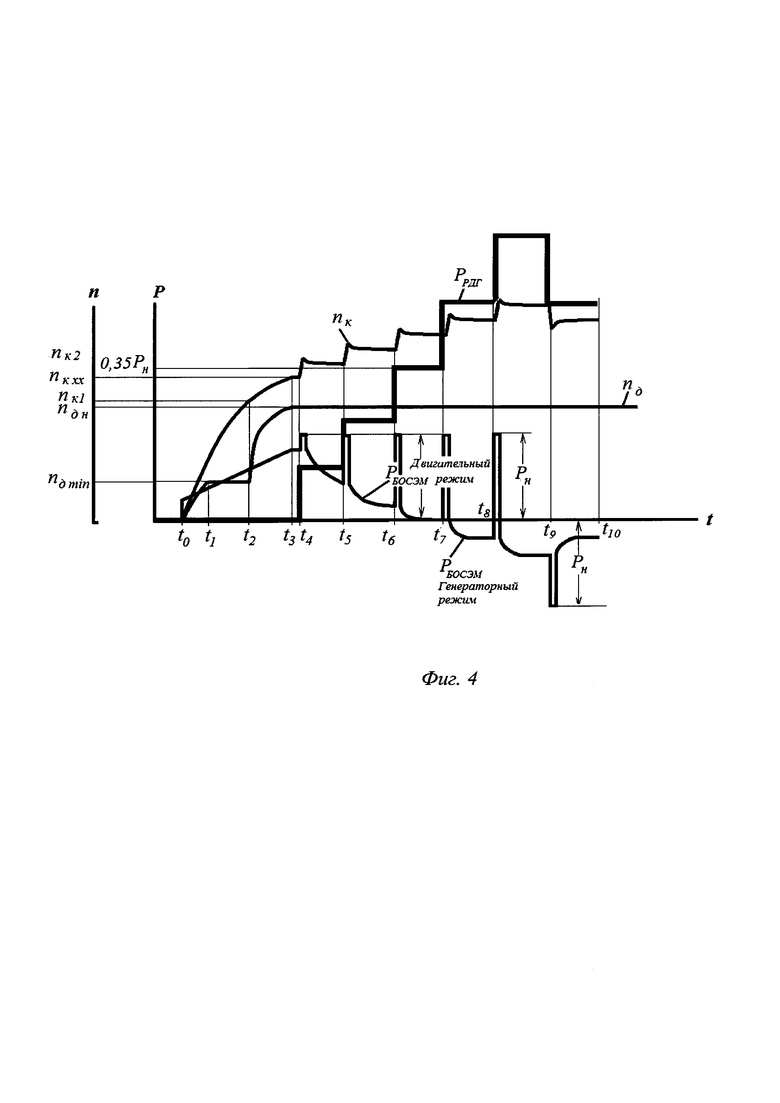
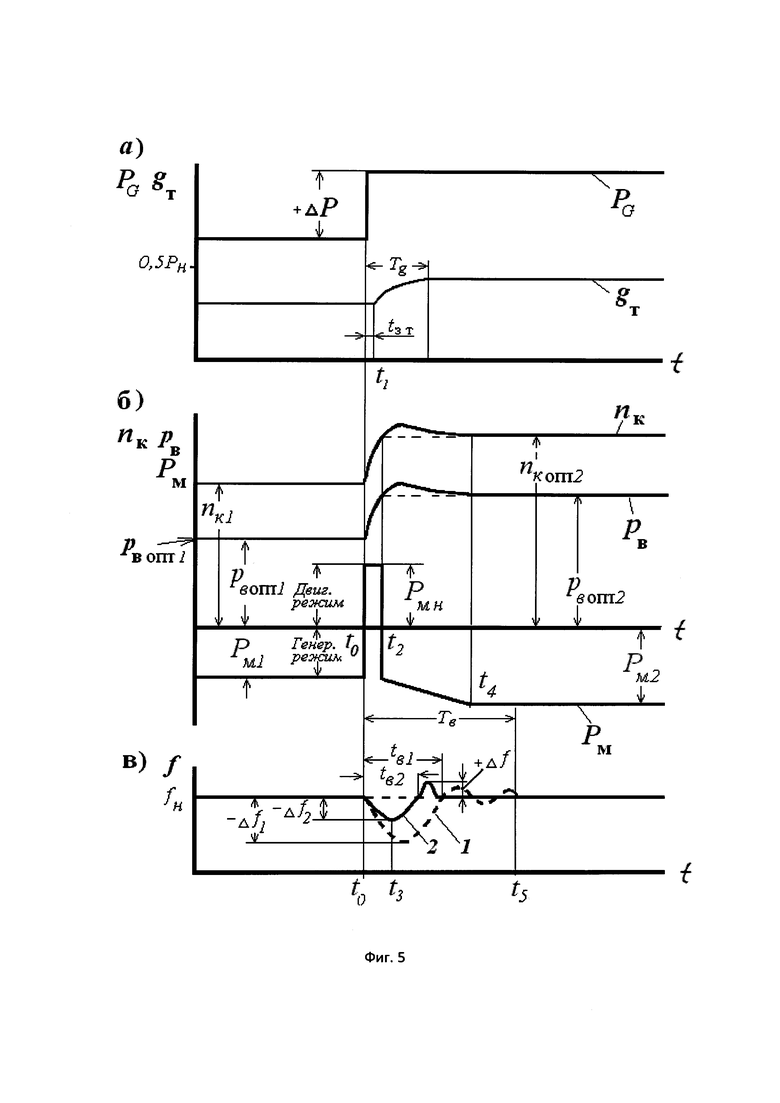
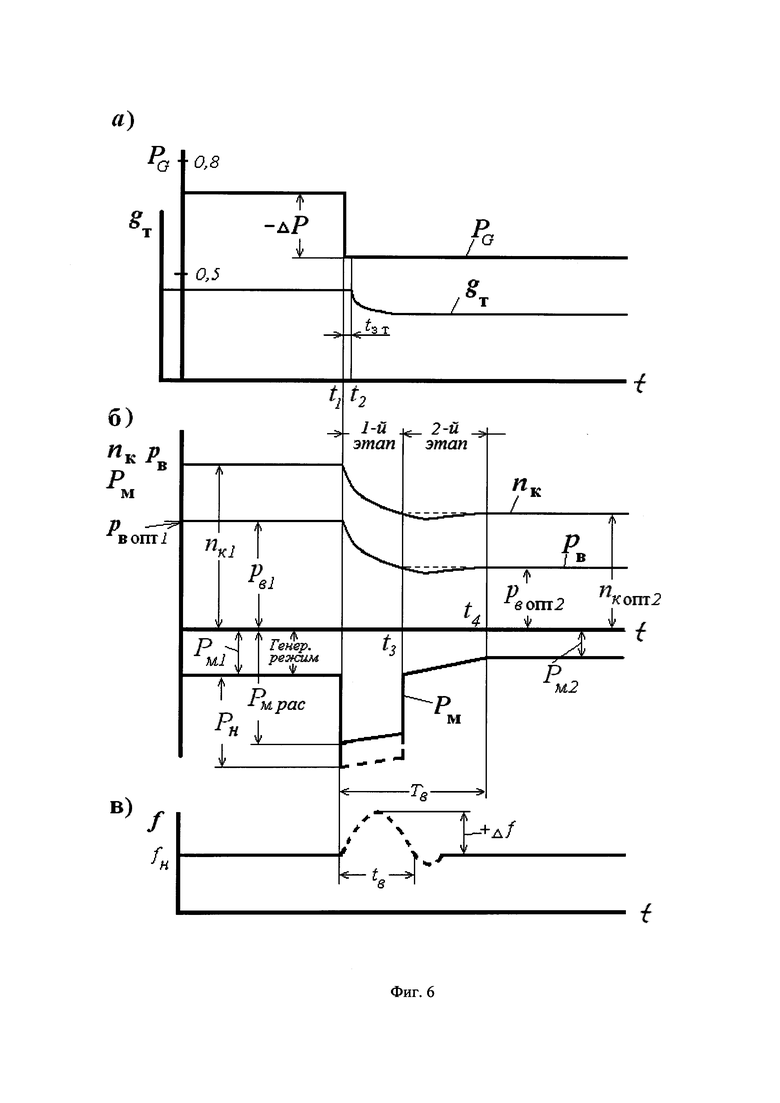
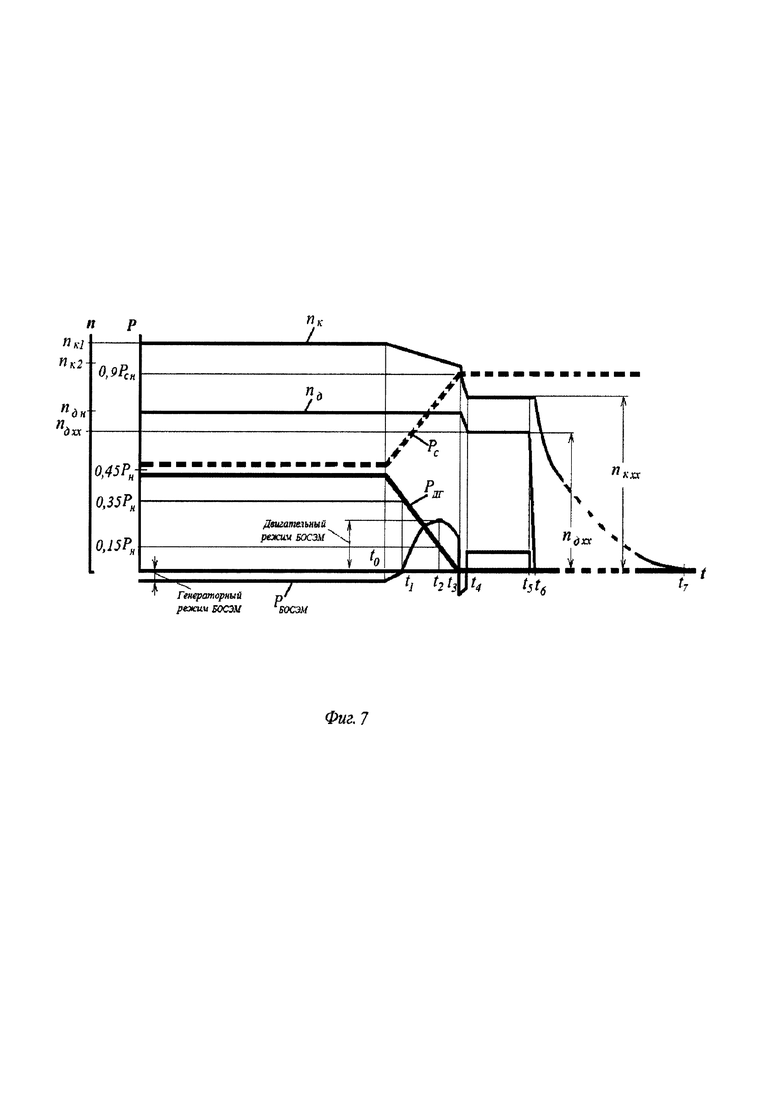
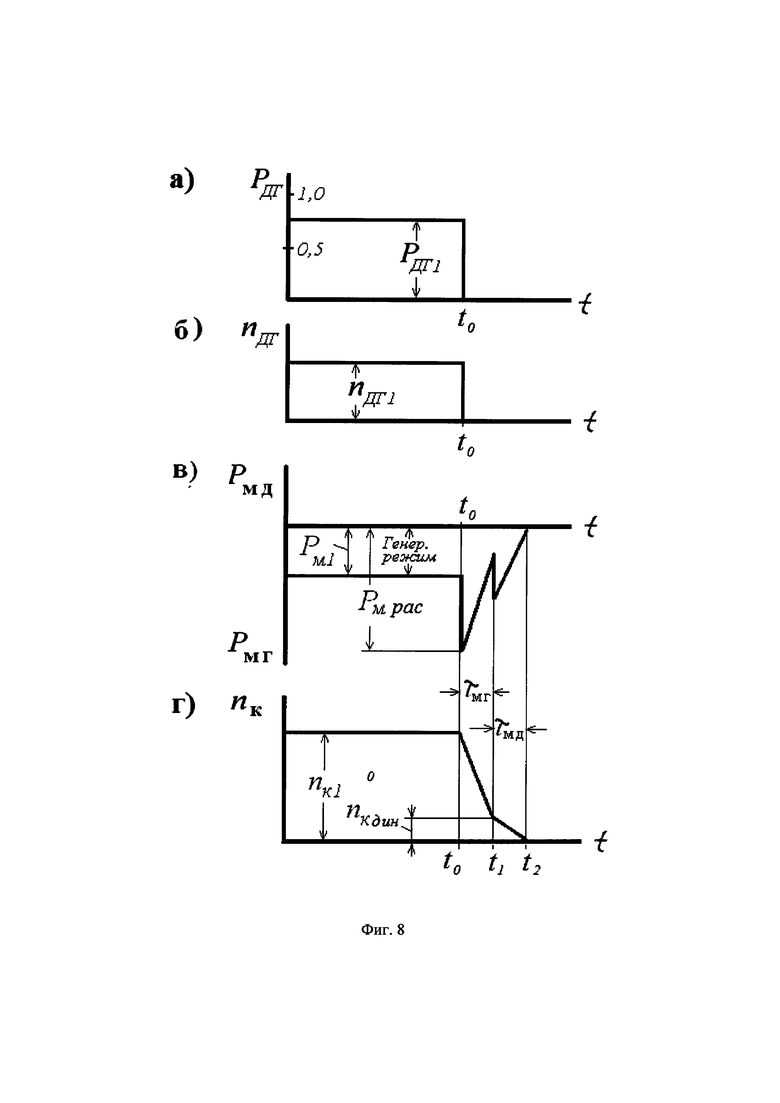
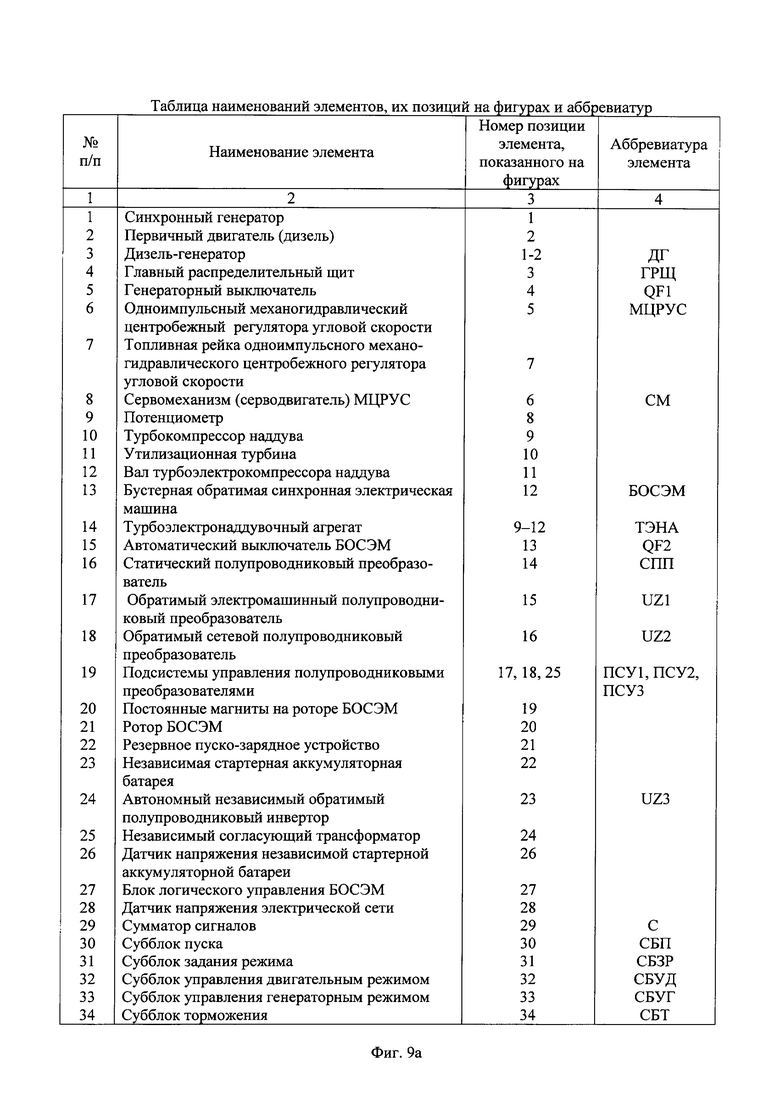
Предложен способ адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора (ДГ). Использование: дизельные электростанции. Технический результат: повышение надежности и ресурса турбонаддувочного агрегата (ТНА) ДГ; улучшение приемистости ДГ и др. Сущность: для наддува ДГ (1-2) используют ТНА (9-12) с воздушными подшипниками и бустерной электрической машиной - БЭМ (12), встроенной в приемную полость турбокомпрессора (9) и возбуждаемой постоянными магнитами (19); при резком изменении нагрузки на ДГ (1-2) производят по сигналам ПИД-регулятора (38) изменение подачи топлива посредством регулятора (5) и двухэтапное по времени адаптивное воздействие на электромагнитный момент БЭМ (12): на 1-м этапе скачком изменяют его значение либо знак, воздействуя на блок (27) логического управления БЭМ (12), на втором этапе возвращают ее в предшествующий режим с последующей корректировкой электромагнитного момента сигналом обратной связи по давлению воздуха, посылаемому датчиком (40). 3 з.п. ф-лы, 9 ил.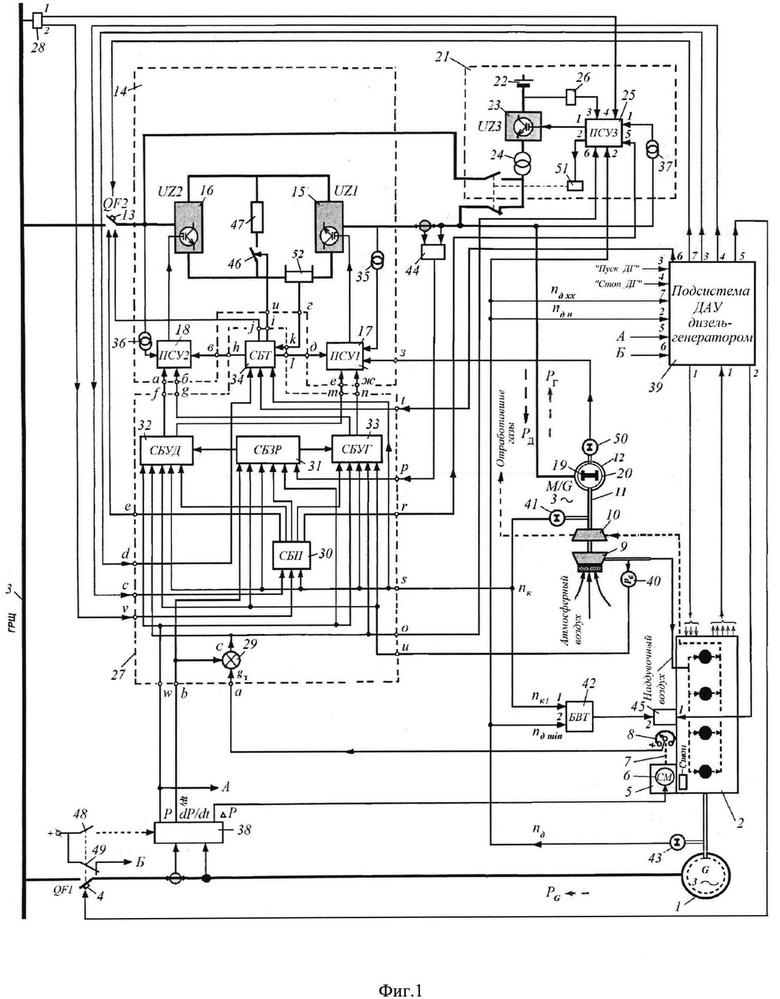
1. Способ адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора, заключающегося в том, что при запуске синхронного дизель-генератора посредством его пусковоздушной системы по сигналам его подсистемы дистанционного автоматизированного управления разгоняют одновременно и его турбоэлектронаддувочный агрегат, содержащий утилизационную газовую турбину и турбокомпрессор наддува, посредством бустерной обратимой синхронной электрической машины, соединенной электрически с шинами главного распределительного щита посредством автоматического выключателя и статического полупроводникового преобразователя данной бустерной обратимой синхронной электрической машины, включаемой в режим приводного электродвигателя посредством ее статического полупроводникового преобразователя, при номинальном токе возбуждения, а после завершения процесса запуска синхронного дизель-генератора нагружают его типовым способом статической активной мощностью; в рабочем режиме с увеличением статической нагрузки на включенном синхронном дизель-генераторе по мере ее приема и соответственно непрерывном возрастании вращающего момента, развиваемого утилизационной газовой турбиной турбокомпрессора наддува, электромагнитный двигательный момент бустерной обратимой синхронной электрической машины, работающей приводным электродвигателем, адекватно снижают путем уменьшения напряжения статического полупроводникового преобразователя по сигналу, формируемому трехимпульсным электронным пропорционально-интегрально-дифференциальным регулятором подачи топлива и наддувочного воздуха; при этом в период работы данного синхронного дизель-генератора в статических режимах и возрастании его нагрузки измеряют посредством данного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха сигнал статического приращения этой мощности, воздействуют этим статическим сигналом приращения как на увеличение подачи топлива посредством серводвигателя одноимпульсного механогидравлического центробежного регулятора угловой скорости, так и увеличение давления наддувочного воздуха первичного двигателя синхронного генератора посредством бустерной обратимой синхронной электрической машины и системы управления ее статическим полупроводниковым преобразователем, снижая при этом напряжение на клеммах бустерной обратимой синхронной электрической машины, ее якорный ток и электромагнитный двигательный момент обратно пропорционально возрастающей статической нагрузке синхронного дизель-генератора; причем одновременно с возрастанием вращающего момента, развиваемого утилизационной турбиной турбокомпрессора наддува, контролируют посредством датчика холостого хода и направления мощности бустерной обратимой синхронной электрической машины момент ее перехода в режим холостого хода, соответствующий возросшей нагрузке синхронного дизель-генератора до значения, равного 35% номинальной, воздействуют нулевым сигналом данного датчика холостого хода и направления мощности на систему управления статическим полупроводниковым преобразователем, обращая бустерную обратимую синхронную электрическую машину в данный момент в генераторный режим холостого хода, которая, управляя данной машиной и ее режимами, осуществляет программные изменения знака электромагнитного момента на валу машины, затем в период работы синхронного дизель-генератора со статической активной нагрузкой более 35% номинальной увеличивают тормозной электромагнитный момент бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата, переведенной в генераторный режим, посредством системы управления полупроводниковым преобразователем-возбудителем, утилизируя все возрастающий избыток энергии теплоты отработавших газов синхронного дизель-генератора в электрическую энергию и направляя ее в электрическую сеть по цепи питания; при работе синхронного дизель-генератора в диапазоне статических активных нагрузок выше 35% номинальной и набросе мощности измеряют посредством трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха сигналы статического и динамического приращения этой мощности, согласованно и синхронно увеличивают этими сигналами подачу топлива и давление наддувочного воздуха путем того, что статическим сигналом приращения воздействуют на серводвигатель одноимпульсного механогидравлического центробежного регулятора угловой скорости и увеличивают подачу топлива, а динамическим - на систему управления статическим полупроводниковым преобразователем бустерной обратимой синхронной электрической машины, чем понижают на этом этапе переходного процесса якорный ток и тормозной электромагнитный момент обратимой синхронной электрической машины, работающей генератором, а при сбросе мощности в этом же диапазоне статических нагрузок синхронного дизель-генератора подачу топлива изложенным путем и теми же средствами понижают, а давление наддува синхронного дизель-генератора одновременно и согласованно теми же средствами дефорсируют путем увеличения на этом этапе переходного процесса якорного тока и электромагнитного тормозного момента бустерной обратимой синхронной электрической машины, отличающийся тем, что бустерную обратимую синхронную электрическую машину заявляемого высокооборотного - свыше 50⋅103 мин-1 - турбоэлектронаддувочного агрегата, выполненного с воздушными подшипниками без жидкостной смазки, возбуждают постоянными магнитами, расположенными на полюсах ротора данной бустерной обратимой синхронной электрической машины, а магнитный поток в ее воздушном зазоре независимо от текущего генераторного или электродвигательного режимов поддерживают неизменным и равным номинальному значению; саму бустерную обратимую синхронную электрическую машину, которую выполняют встроенной в приемную полость турбокомпрессора наддува на его валу, охлаждают потоком всасываемого воздуха данного турбокомпрессора, а вышеназванным статическим полупроводниковым преобразователем, состоящим из двух одинаковых обратимых полупроводниковых преобразователей, а именно электромашинного и сетевого, и содержащим звено постоянного тока, управляют посредством его системы управления, состоящей из независимых подсистем управления указанными обратимыми соответственно электромашинным и сетевым полупроводниковыми преобразователями, при этом командные сигналы и напряжения управления в процессе регулирования параметров наддувочного воздуха на данные независимые подсистемы управления обратимыми соответственно электромашинным и сетевым полупроводниковыми преобразователями формируют посредством блока логического управления бустерной обратимой синхронной электрической машиной, в состав которого входят сумматор входных управляющих сигналов, субблоки соответственно пуска, задания режимов, управления двигательным, управления генераторным режимами и субблок торможения, причем синхронизирующие напряжения при работе всех данных подсистем управления подают на их синхронизирующие входы посредством соответствующих трансформаторов и датчика положения ротора бустерной обратимой синхронной электрической машины; при этом упомянутые выше программные изменения знака электромагнитного момента на валу бустерной обратимой синхронной электрической машины, управляющие ее режимами, и саму корректировку значения последнего по абсолютной величине в процессе осуществления регулирования давления наддувочного воздуха синхронного дизель-генератора, связанного с изменением его текущих статических и динамических нагрузочных режимов, производят по цепям данных подсистем управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины путем воздействия на углы управления их полупроводниковых приборов по сигналам трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора подачи топлива и давления наддувочного воздуха, взаимодействующего согласованно и синхронно с указанным блоком логического управления бустерной обратимой синхронной электрической машиной турбоэлектронаддувочного агрегата; в период работы синхронного дизель-генератора в диапазоне статических активных нагрузок выше 35% номинальной и набросе мощности, наряду с воздействием на увеличение подачи топлива, посредством вышеназванного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора, статическим сигналом приращения через серводвигатель одноимпульсного механогидравлического центробежного регулятора угловой скорости, динамическим сигналом соответствующего увеличения мощности от данного трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора воздействуют на блок логического управления бустерной обратимой синхронной электрической машиной турбоэлектронаддувочного агрегата и, посредством реверсивных сигналов, посылаемых его субблоком задания режимов на субблоки управления соответственно двигательным и генераторным режимами, воздействуют последними на подсистемы управления обратимыми сетевым и электромашинным полупроводниковыми преобразователями статического полупроводникового преобразователя, переключая бустерную обратимую синхронную электрическую машину, работающую генератором, на первом этапе этого переходного процесса из генераторного в двигательный номинальный режим и, соответственно, с последующим ее возвратом в предшествующий генераторный режим и дальнейшим увеличением ее якорного тока и тормозного электромагнитного момента на втором этапе данного переходного процесса по сигналам обратной связи пропорционально возросшей статической нагрузке синхронного дизель-генератора; в период работы синхронного дизель-генератора в статическом режиме в этом же диапазоне нагрузок и сбросе части его нагрузки, наряду с воздействием, посредством трехимпульсного электронного пропорционально-интегрально-дифференциального регулятора, статическим сигналом изменения на уменьшение подачи топлива синхронного дизель-генератора, динамическим сигналом соответствующего уменьшения мощности, формируемым этим же регулятором и посылаемым на блок логического управления бустерной обратимой синхронной электрической машиной, воздействуют на субблок задания режимов этого блока логического управления, блокируя переключение бустерной обратимой синхронной электрической машины из генераторного в двигательный режим, причем тем же динамическим сигналом, направляемым через сумматор блока логического управления на субблок управления генераторным режимом данной электрической машины, воздействуют на подсистемы управления соответственно электромашинным и сетевым обратимыми полупроводниковыми преобразователями бустерной обратимой синхронной электрической машины, увеличивая скачком ее генерирующую мощность для повышения на первом этапе переходного процесса эффективности притормаживания турбоэлектронаддувочного агрегата посредством данной бустерной обратимой синхронной электрической машины, работающей в генераторном режиме, с целью более быстрого снижения параметров наддувочного воздуха, при этом измеряют ток нагрузки в цепи постоянного тока статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины посредством встроенного в нее шунта, сравнивают, посредством субблока торможения, сигнал измеренного значения тока с программно-заданным в нем номинальным значением и, если измеренное значение сигнала окажется меньше заданного, включают по сигналу данного субблока торможения в цепь постоянного тока статического полупроводникового преобразователя, параллельно его обратимым сетевому и электромашинному полупроводниковым преобразователям, резистор динамического торможения, который отключают тем же субблоком торможения с началом второго этапа переходного процесса, при котором с его началом возвращают бустерную обратимую синхронную электрическую машину в предшествующий генераторный режим тем же субблоком торможения по сигналу обратной связи от датчика давления воздуха в воздушном коллекторе турбоэлектронаддувочного агрегата с последующим уменьшением в данном режиме тока и электромагнитного тормозного момента бустерной обратимой синхронной электрической машины на втором этапе таким же путем, как изложено выше при его повышении; а в период нормальных и аварийных остановок синхронного дизель-генератора, не вызывающих помпажа его образованного турбоэлектрокомпрессора наддува, процедуру принудительной остановки последнего методом электрического торможения, посредством бустерной обратимой синхронной электрической машины, блокируют, сохраняя ее для случая защиты первичного двигателя от предельной частоты вращения - «разноса».
2. Способ адаптивного автоматического регулирования давления наддувочного воздуха дизель-генератора по п. 1, отличающийся тем, что при обесточенной электрической сети разгон бустерной обратимой синхронной электрической машины его турбоэлектронаддувочного агрегата, синхронизированный с запуском первичного двигателя и гарантирующий переход последнего на топливо с первой попытки его впрыска, осуществляют в ее режиме приводного синхронного электродвигателя с частотным управлением посредством резервного пуско-зарядного устройства, состоящего из независимой стартерной аккумуляторной батареи, автономного независимого обратимого полупроводникового инвертора, независимого согласующего трансформатора, подсистемы управления данным инвертором, трансформатора синхронизации, вспомогательного контактора и датчика напряжения данной аккумуляторной батареи, при котором посылают пусковой сигнал с выхода подсистемы дистанционного автоматизированного управления резервным синхронным дизель-генератором на вход субблока пуска блока логического управления, на другом входе которого наличествует нулевой сигнал датчика напряжения электросети об отсутствии напряжения на ее шинах, а с выхода данного субблока пуска, дублируя команду на пуск бустерной обратимой синхронной электрической машины турбоэлектронаддувочного агрегата, направляют этот пусковой сигнал на вход подсистемы управления названным автономным независимым обратимым полупроводниковым инвертором, по команде которой, посредством этого инвертора, производят программное преобразование напряжения постоянного тока на клеммах данной аккумуляторной батареи в напряжение переменного тока нарастающей частоты с программно заданной в указанной подсистеме управления автономным независимым обратимым полупроводниковым инвертором скоростью, повышают это напряжение посредством упомянутого независимого согласующего трансформатора и подают его на клеммы бустерной обратимой синхронной электрической машины, запуская и разгоняя ее по мере нарастания частоты ƒвых выходного напряжения ~U1вых независимого обратимого полупроводникового инвертора, чем повышают и его действующее значение напряжение ~U2вых на клеммах бустерной обратимой синхронной электрической машины, согласно закону частотного регулирования для механизма с вентиляторной нагрузкой, по соотношению:
где U2вых и ƒ - переменное выходное напряжение и его частота на клеммах бустерной обратимой синхронной электрической машины; тем самым производят частотный разгон бустерной обратимой электрической машины турбоэлектронаддувочного агрегата в режиме приводного синхронного электродвигателя, а заодно и его турбоэлектрокомпрессора, которые конструктивно исполнены на одном валу; при этом одновременно разгоняют и первичный двигатель резервного синхронного дизель-генератора, посредством его пуско-воздушной системы, по сигналу, приходящему в данный момент на ее вход с выхода подсистемы дистанционного автоматизированного управления, с контролем при этом разгона первичного двигателя и его турбоэлектронаддувочного агрегата соответствующими датчиками частоты вращения, по сигналам которых осуществляют подачу с выхода блока впрыска топлива сигнала «Впрыск топлива» на вход пуско-воздушной системы первичного двигателя резервного синхронного дизель-генератора, запуская его в данном частном случае; причем по завершении данного запуска резервного синхронного дизель-генератора и после его подключения к электрической сети, по сигналу о восстановлении напряжения, формируемому датчиком напряжения электрической сети, осуществляют дальнейшую работу бустерной обратимой синхронной электрической машины в режиме приводного вентильного электродвигателя посредством ввода в действие субблоком пуска блока логического управления и статическим полупроводниковым преобразователем данной машины, а синхронно с включением данного статического полупроводникового преобразователя бустерной обратимой синхронной электрической машины переводят автономный независимый обратимый полупроводниковый инвертор резервного пуско-зарядного устройства, посредством его подсистемы управления и контактов вспомогательного контактора, по сигналу датчика напряжения независимой стартерной аккумуляторной батареи в выпрямительный режим для автоматической подзарядки этой батареи.
3. Способ адаптивного автоматического регулирования давления по п. 1, отличающийся тем, что электромашинный и сетевой обратимые полупроводниковые преобразователи выполняют на силовых транзисторах типа IGBT.
4. Способ адаптивного автоматического регулирования давления по п. 2, отличающийся тем, что автономный независимый обратимый полупроводниковый инвертор резервного пуско-зарядного устройства бустерной обратимой синхронной электрической машины выполняют на силовых транзисторах типа IGBT.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| СПОСОБ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ДАВЛЕНИЙ НАДДУВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С ПРИВОДНЫМ КОМПРЕССОРОМ И СИСТЕМОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2338913C1 |
| Способ оценки плодовитости свиней пород ландрас и крупная белая | 2015 |
|
RU2634404C2 |
| US 20110172894 A1, 14.07.2011. | |||

