Изобретение относится к радиолокации и может быть использовано для обнаружения, измерения координат, сопровождения и распознавания на малой и средней дальности (до 100 км) средств поражения, а также широкого класса воздушных объектов (ВО).
Известны современные зарубежные мобильные трехкоординатные радиолокационные обнаружители (РЛО) воздушных объектов, аналогичные по назначению, такие как радиолокационные станции (РЛС) AN/MPQ-64 и AN/UPS-3 (США), «Dagger» (Англия), Giraffe 50 AT (Швеция), RAC (Франция) [1], обеспечивающие обнаружение воздушных объектов (самолетов, вертолетов, беспилотных летательных аппаратов, крылатых ракет и других) с необходимыми дальностью обнаружения, точностью определения координат, темпом обновления информации, мобильностью и т.д.
Большинство этих радиолокационных средств работает в диапазоне частот более 2 ГГц, поэтому их эффективность при работе в непогоду (дождь, снег и др.) снижается из-за возрастания затухания радиоволн при распространении, приводящего к значительному уменьшению дальности обнаружения. Кроме того, в связи с тем, что большая часть имеющихся в настоящее время средств поражения, наводящихся на излучение, работает на частотах более 1,5 ГТц, существенно увеличивается вероятность поражения РЛС, работающих в этих же частотных диапазонах.
Другим существенным недостатком аналогов является то, что ни один из них не обеспечивает обзор пространства в угломестной плоскости в диапазоне больше чем от 0 до 55°, что при необходимости обнаружения воздушных объектов во всей верхней полусфере, в том числе на углах, близких к зенитным, ограничивает их применение.
Указанные выше недостатки устранены в мобильной трехкоординатной РЛС обнаружения [2], работающей на частотах длинноволновой части UHF диапазона и обеспечивающей обнаружение ВО в диапазоне углов места от 0 до 90°. Данная РЛС выбрана в качестве прототипа.
РЛС - прототип состоит из вращающейся в азимутальной плоскости активной фазированной антенной решетки (АФАР), установленной на опорно-поворотном устройстве (ОПУ), аппаратуры канала опознавания государственной принадлежности (ОГП), процессора (ПР), индикатора (ИНД), автоматической системы навигации (АСН) и угломестного привода (УП). Прототип размещен на подвижном наземном носителе и обеспечивает работу на марше.
Обзор пространства по азимуту осуществляется прототипом путем кругового вращения АФАР, а по углу места - путем механической установки АФАР на заданный угол угломестным приводом УП и электронного сканирования лучом по командам процессора ПР, обеспечивая угломестный обзор от 0 до 90°.
Недостатком прототипа является низкий темп обзора пространства, ограниченный максимальной скоростью вращения АФАР в азимутальной плоскости, которая для антенн UHF диапазона не превышает 1 оборота в секунду. Для средств поражения, имеющих скорость 1000 м/с и более, актуально повысить темп обзора пространства, обеспечив при этом необходимую вероятность обнаружения и завязки трассы.
Техническим результатом предлагаемого изобретения является повышение темпа обзора пространства всей полусферы.
Указанный технический результат достигается благодаря тому, что в известную РЛС, работающую на частотах длинноволновой части UHF диапазона и содержащую АФАР с возможностью сканирования лучом по углу места, ПР, АСН и ИНД, дополнительно введены три аналогичные АФАР, причем, каждая из четырех невращающихся АФАР работает на своей частоте указанного выше рабочего диапазона и обеспечивает электронное сканирование лучом как по углу места от 0 до 90°, так и по азимуту, совершая одновременный обзор в своем азимутальном секторе шириной 90°.
Дополнительным техническим результатом является повышенная надежность и скрытность РЛО, которые достигаются благодаря отсутствию механического вращения и наклона АФАР и полностью электронному сканированию.
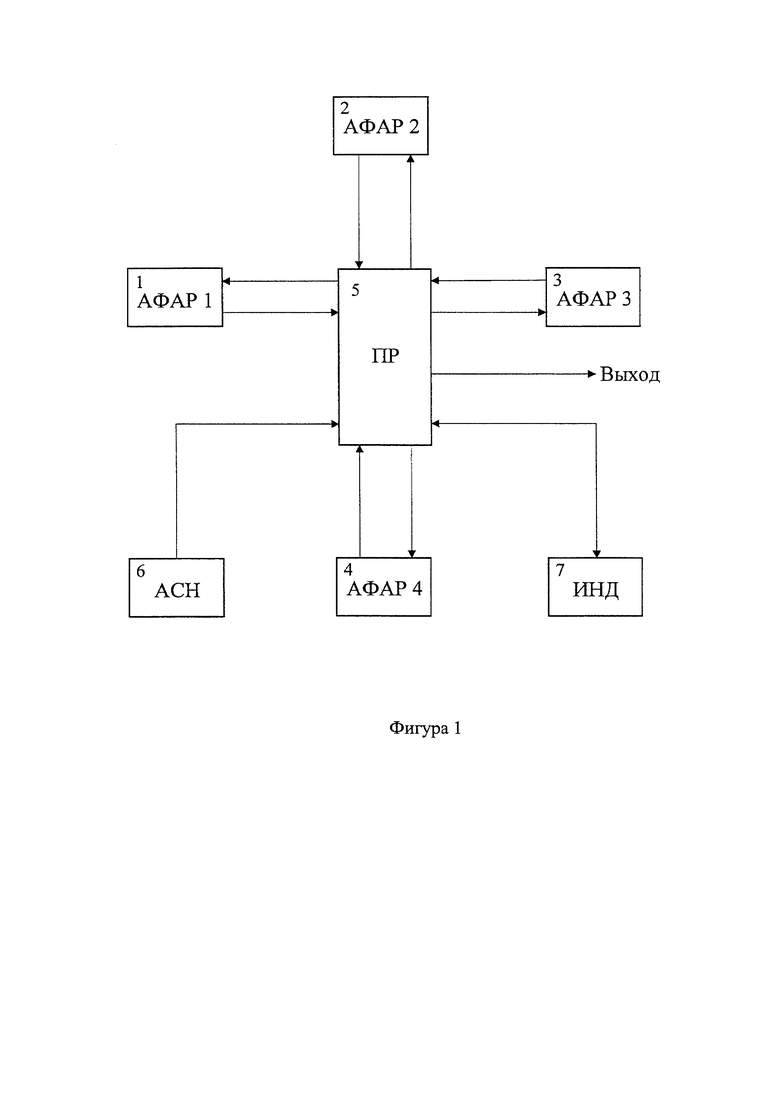
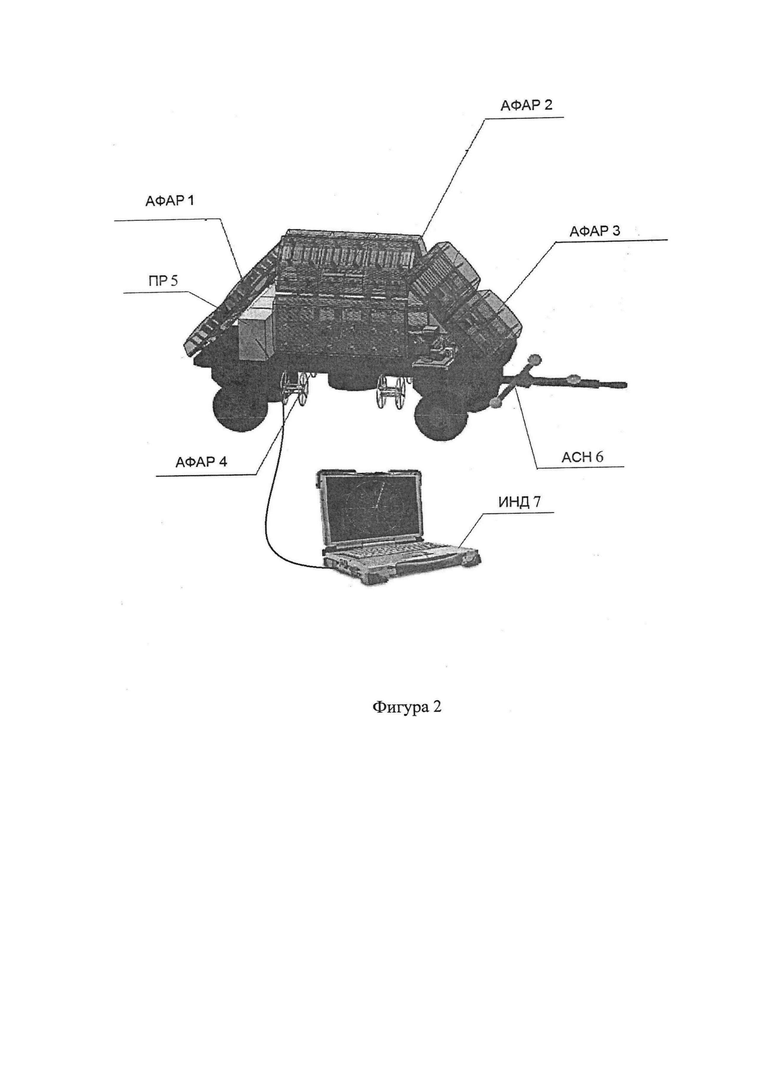
На фигуре 1 представлена структурная схема предлагаемого устройства, а на фигуре 2 - его общий вид, где обозначены:
1-4 - активные фазированные антенные решетки (АФАР 1 - АФАР 4);
5 - процессор (ПР);
6 - автоматическая система навигации (АСН);
7 - индикатор (ИНД).
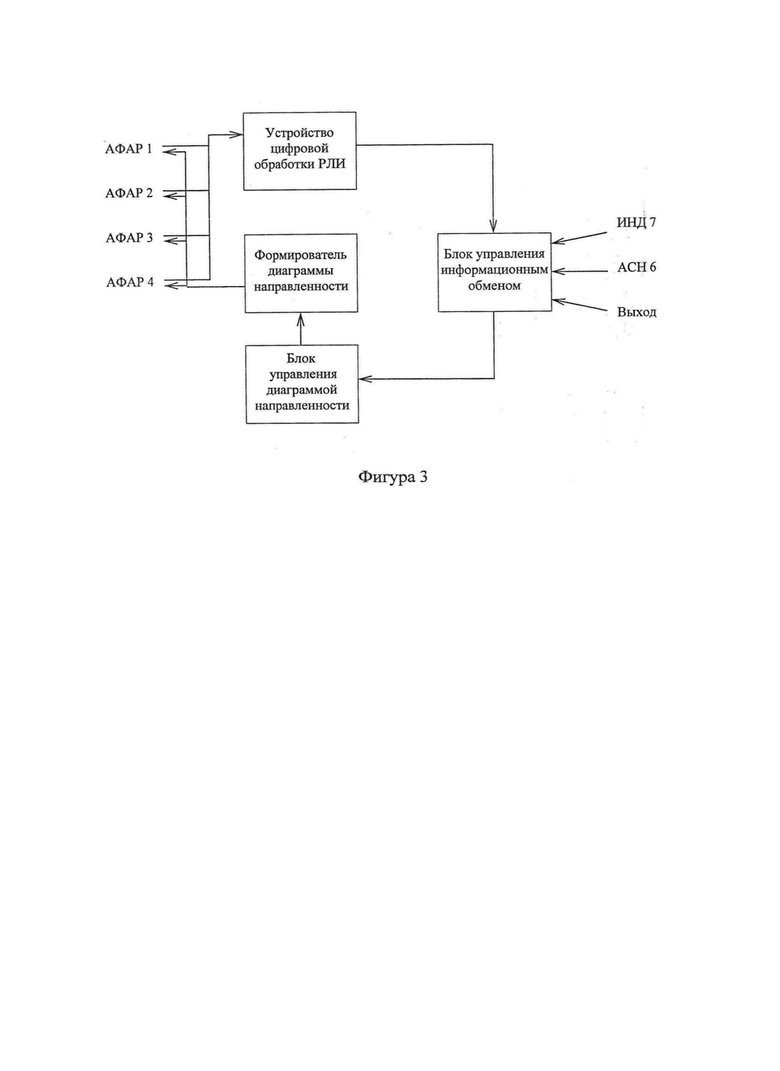
На фигуре 3 представлена упрощенная структурная схема ПР 5.
РЛО располагается на автомобильном прицепе и содержит четыре активных фазированных антенных решетки (АФАР 1 - АФАР 4) 1-4, процессор (ПР) 5, автоматическую систему навигации (АСН) 6 и индикатор (ИНД) 7. При этом, выход каждой из четырех АФАР соединен с соответствующими входами ПР 5, а выходы ПР 5, соответственно, соединены с входами АФАР 1-4. Другой (пятый) вход ПР 5 соединен с выходом АСН 6. Вход-выход ПР 5 соединен с входом-выходом ИНД 7, а другой (пятый) выход ПР 5 является выходом РЛО.
РЛО содержит также аппаратуру электроснабжения всех составных частей РЛО, аппаратуру жизнеобеспечения, контроля, синхронизации, опознавания и госпринадлежности и передачи данных потребителям, которая для упрощения понимания работы обнаружителя не показана на фигурах.
Каждая АФАР 1-4 представляет собой плоскую антенную решетку, аналогичную прототипу и содержащую n идентичных горизонтальных приемопередающих линеек вибраторов и блок приемопередающих модулей (ППМ).
Блок ППМ состоит из возбудителя, предварительного широкополосного усилителя мощности, делителя мощности на n, n аналого-цифровых преобразователей (АЦП) и n ППМ. Каждый ППМ содержит усилитель мощности, антенный переключатель и малошумящий усилитель, делитель мощности на m, m аналоговых фазовращателей и аттенюаторов (где m - число вибраторов в каждой линейке АФАР) и соединен с одной из приемопередающих линеек вибраторов.
ПР 5, показанный на фигуре 3, реализует цифровую обработку радиолокационной информации параллельно с каждой из четырех АФАР. В устройстве цифровой обработки РЛИ обеспечивается выделение полезного сигнала на фоне шумов и помех и обнаружение над порогом. Информация о целях поступает на блок управления информационным обменом, который в свою очередь осуществляет прием и передачу информации об обнаруженных целях и команды управления на ИНД 7. Также в ПР 5 осуществляется управление диаграммой направленности каждой из АФАР по командам, поступающим от блока управления диаграммой направленности. Формирование диаграммы направленности осуществляется путем подачи управляющих команд на аттенюаторы и фазовращатели в каждой АФАР. ПР 5 представляет собой вычислитель и может быть выполнен, например, на основе СЦВМ «СОЛО-25» [3].
АСН 6 состоит из антенны и вычислителя для ориентирования и топопривязки РЛО при его работе в стационарном положении и может быть выполнена, например, в виде многофункционального радионавигационного комплекса МРК-32 (УЭ2.517.020ТУ) [4]. Размещается на прицепе с РЛО.
ИНД 7 представляет собой рабочее место оператора, включающее устройство отображения информации и пульт управления работой РЛО и может быть выполнен на основе промышленного защищенного ноутбука TS Strong@Master 7020Т (ЕС-1866) [5].
При стационарной работе ИНД 7 вместе с оператором размещается в любом удобном для работы месте, а при работе на марше - в кабине водителя.
Так же, как РЛС-прототип, РЛО размещается на подвижном наземном носителе и обеспечивает работу как на марше, так и стационарно (см. фигура 2).
РЛО работает следующим образом.
Зондирующий импульс с требуемыми характеристиками формируется в каждой из 4-х АФАР на разных несущих частотах. По команде ПР 5 (поступающей на АФАР 1-4), управляющего зоной обзора РЛО в угломестной и азимутальной плоскостях, импульс, сформированный возбудителем и усиленный по мощности широкополосным усилителем блока ППМ, при помощи делителя мощности на n, и n аналоговых аттенюаторов и фазовращателей распределяется по величине и фазе между входами n ППМ, которые усиливают по мощности эти входные импульсы и через антенные переключатели и делитель на m подают их на m аттенюаторов и фазовращателей и далее - на m вибраторов каждой из линеек для излучения в пространство.
Эхо-сигналы, принятые линейками вибраторов каждой из 4-х АФАР, проходят через m аттенюаторов и фазовращателей, антенные переключатели и малошумящие усилители в каждом из ППМ и подаются на АЦП в ППМ, где аналоговые сигналы преобразуются в цифровую форму, и поступают на соответствующие данной АФАР n входов ПР 5. В режиме приема формирование диаграммы направленности по углу места и сканирование лучом происходит в результате цифровой обработки эхо-сигналов.
На ПР 5 поступает также информация с АСН 7 о курсе, крене и дифференте РЛО для его ориентирования и топопривязки при работе как в стационарном положении, так и на марше.
На основании полученных данных ПР 5 производит пространственно-временную обработку отраженных сигналов [6, с. 21-130], осуществляя защиту от пассивных и активных помех, обнаружение, опознавание и измерение координат ВО [6, с. 131-182], сопровождение траекторий ВО [6, с. 183-330] и распознавание типов ВО [6, с. 331-370], автоматическое управление работой РЛО [6, с. 371-405] и его устройств, а также выдачу необходимой информации на ИНД 7 и потребителям.
На ИНД 7 отображается информация, выдаваемая ПР 5. Пульт управления позволяет оператору управлять работой РЛО и его устройств через ПР 5.
Обзор пространства по азимуту осуществляется путем электронного сканирования лучами по азимуту в каждой из 4-х АФАР 1-4 в своем секторе 90°, а по углу места - путем электронного сканирования лучами в каждой из АФАР, по командам с ПР 5, обеспечивая обзор как по азимуту, так и по углу места. Время обзора каждой АФАР по азимуту составляет не более 0,2 с. Так как АФАР 1-4 осуществляют обзор одновременно, каждая на своей несущей частоте, время обзора пространства всей полусферы также не превышает 0,2 с.
Таким образом, применение в РЛО 4-х невращающихся АФАР, каждая из которых работает на своей частоте в своем азимутальном секторе одновременно и обеспечивает электронное сканирование лучом по азимуту на 90° и углу места от 0 до 90°, позволило уменьшить период обзора пространства всей полусферы, а также повысить надежность и скрытность.
Источники информации
1 Журнал JANE'S RADAR AND ELECTRONIC WARFARE SYSTEMS, 2002-2003, США.
2 Мобильная трехкоординатная РЛС обнаружения. Патент на полезную модель: RU 96664 U1. Опубл. 10.08.2010 г. Бюл. №22.
3 Руководство по эксплуатации ВИАМ.466226.015РЭ
4 http://ww.ts.ru/sm7020t.html
5 http://xn--glafsi.xn--plai/nav_mrc-32.html
6 С.З. Кузьмин Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000, - 428 с: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ обзора воздушного пространства импульсно-доплеровской радиолокационной станцией с активной фазированной антенной решеткой | 2022 |
|
RU2794466C1 |
| МОБИЛЬНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ СРЕДСТВ ПОРАЖЕНИЯ И ПРОТИВОДЕЙСТВИЯ ЭТИМ СРЕДСТВАМ | 2016 |
|
RU2658640C2 |
| АНТЕННО-ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2324950C1 |
| Способ построения радиолокационной станции | 2019 |
|
RU2723299C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА С РАСШИРЕННЫМИ УГЛАМИ СЕКТОРНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2352033C1 |
| ПЕРЕНОСНАЯ МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СЕКТОРНОГО ОБЗОРА ПРОСТРАНСТВА | 2024 |
|
RU2832851C1 |
| ДИРИЖАБЛЬ ДАЛЬНЕГО РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ | 2015 |
|
RU2604914C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ СКАНИРУЮЩАЯ АНТЕННА ДЛЯ МНОГОРЕЖИМНОГО КОСМИЧЕСКОГО РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2009 |
|
RU2392707C1 |
Изобретение относится к области радиолокации и может быть использовано для обнаружения, измерения координат, сопровождения и распознавания на малой и средней дальности (до 100 км) средств поражения, а также широкого класса воздушных объектов. Техническим результатом предлагаемого изобретения является повышение темпа обзора пространства всей полусферы. Для этого радиолокационная станция, работающая на частотах длинноволновой части UHF диапазона и содержащая активную фазированную антенную решетку (АФАР) с возможностью сканирования лучом по углу места, процессор, автоматическую систему навигации и индикатор, содержит еще три аналогичные АФАР. При этом каждая из четырех невращающихся АФАР работает на своей частоте указанного выше рабочего диапазона и обеспечивает электронное сканирования лучом как по углу места от 0 до 90°, так и по азимуту, совершая одновременный обзор в своем азимутальном секторе шириной 90°. Дополнительно обеспечивается повышенная надежность и скрытность радиолокационного обнаружителя, которые достигаются благодаря отсутствию механического вращения и наклона АФАР и полностью электронному сканированию. 3 ил.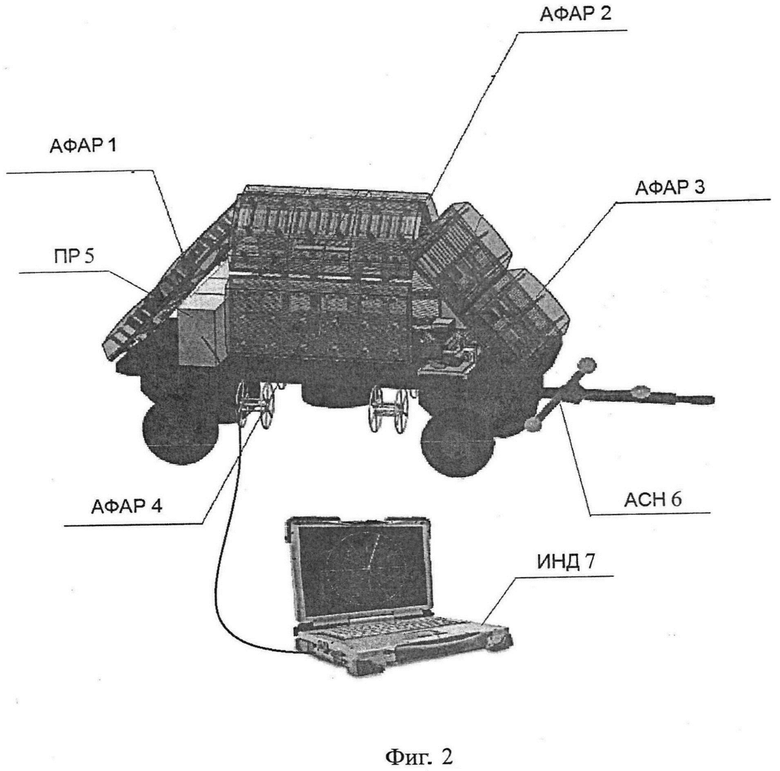
Наземный радиолокационный обнаружитель (РЛО), работающий на частотах длинноволновой части UHF диапазона, расположенный на подвижном наземном носителе и включающий первую активную фазированную антенную решетку (АФАР) с возможностью сканирования лучом по углу места от 0 до 90°, процессор (ПР), автоматическую систему навигации (АСН) и индикатор (ИНД), причем выход первой АФАР для реализации обработки радиолокационной информации соединен с первым входом ПР, первый выход которого соединен со входом АФАР для управления зоной обзора РЛО в угломестной плоскости, пятый вход - с выходом АСН для получения информации о курсе, крене и дифференте РЛО, вход-выход - со входом-выходом ИНД для отображения выходной информации и управления РЛО, а пятый выход является выходом РЛО, отличающийся тем, что в него дополнительно введены три АФАР, аналогичные первой АФАР, с возможностью каждой из четырех АФАР сканирования лучом по азимуту в пределах 90°, причем выходы дополнительных АФАР соединены с соответствующими входами ПР, а выходы ПР - со входами соответствующих АФАР для управления зоной обзора РЛО в азимутальной и угломестной плоскостях, кроме того, каждой из четырех невращающихся АФАР соответствует своя частота в пределах указанного рабочего диапазона и свой азимутальный сектор сканирования шириной 90°.
| Способ изготовления сосудов из регенерированной целлюлозы | 1952 |
|
SU96664A1 |
| Переносный станок для заточки дереворежущих инструментов | 1959 |
|
SU128728A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 7423934 B1, 09.09.2008 | |||
| US 20150301167 A1, 22.10.2015 | |||
| CN 104316925 A, 28.01.2015. | |||

