В целом, настоящее изобретение относится к пневматическим тормозным системам для железнодорожного транспорта
В частности, изобретение предлагает пневматическую тормозную систему, включающую в себя:
первый и второй тормозной привод, связанные с колесами соответствующей оси или соответствующей тележкой транспортного средства, и к которым подключены первый электропневматический блок управления и второй электропневматический блок управления соответственно, каждый из которых содержит впускной электромагнитный клапан и выпускной электромагнитный клапан, выполненные с возможностью увеличения и уменьшения соответственно пневматического давления, подаваемого на соответствующий тормозной привод, и
блок управления, выполненный с возможностью управления упомянутыми электропневматическими блоками управления в зависимости от целевого тормозного давления, так что упомянутые блоки вызывают применение соответствующих давлений к соответствующему тормозному приводу;
причем упомянутый блок управления выполнен с возможностью управления упомянутыми электропневматическими блоками управления, так что соответствующие значения тормозного давления, сумма которых, по меньшей мере, приблизительно равна значению целевого давления торможения, подаются на тормозной привод.
В пневматической тормозной системе этого типа, когда повышающееся пневматическое тормозное давление должно прикладываться к тормозным приводам, впускные электромагнитные клапаны упомянутых первого и второго электропневматических блоков управления активируются практически синхронно, через последовательные моменты времени, разделенные заданным интервалом или периодом, в соответствии с заранее заданными алгоритмами регулирования давления в замкнутом контуре, выполненными независимо для каждого тормозного привода, но в соответствии с общими уставками, чтобы вызвать последовательное увеличение давлений, приложенных к соответствующему тормозному приводу.
Аналогично, когда давление в тормозных приводах должно быть уменьшено, выпускные электромагнитные клапаны упомянутых первого и второго электропневматических блоков управления последовательно активируются, по существу, одновременно, через последовательные моменты времени, чтобы вызвать последовательные уменьшения давлений, приложенных к соответствующему тормозному приводу.
Как будет более полно видно далее, в системе такого типа электромагнитные клапаны электропневматических блоков управления подключаются и обесточиваются много раз, что, с одной стороны, ограничивает их полезный срок службы и, с другой стороны, требует более частых работ по техническому обслуживанию.
ЕР 2527183 А1 и GB 2401413 раскрывают известные примеры пневматических тормозных систем для железнодорожных транспортных средств.
В соответствии с ЕР 2527183 А1 блок сбора данных получает тормозное усилие, необходимое для каждого моторного вагона поезда, блок обнаружения тормозного усилия определяет электрическое тормозное усилие всего поезда, блок регулировки силы торможения распределяет воздух, так что колебания электрического тормозного усилия компенсируются силой пневматического торможения одного вагона, блок управления тормозным усилием посылает команду в устройство управления пневматическим тормозом в зависимости от значения команды, посылаемой блоком регулировки тормозного усилия, и устройство управления пневматическим тормозом управляет пневматическим торможением вагона в соответствии со значением команды.
В соответствии с GB 2401413 А система торможения железнодорожного транспорта с многоосными тележками содержит систему подачи сжатого воздуха, которая питает через первый и второй питающий трубопровод и через соответствующие впускной и выпускной клапаны соответствующие тормозные приводы. Питающие трубопроводы соединены друг с другом через соединительный канал и соединительный клапан, посредством чего каждая пара впускных и выпускных клапанов может избирательно управлять либо соответствующим тормозным приводом, либо двумя тормозными приводами, чтобы уменьшить общее количество операций клапана.
Следовательно, задачей настоящего изобретения является создание пневматической тормозной системы упомянутого типа, которая может преодолеть упомянутые недостатки известных систем.
Эта и другие задачи достигаются в соответствии с изобретением с помощью типа пневматической тормозной системы для железнодорожного транспорта, определенного первоначально, отличающегося тем, что упомянутый блок управления выполнен с возможностью управления, по меньшей мере, на заданный временной интервал, упомянутыми первым и вторым электропневматическими блоками управления поочередно, чтобы вызвать в последующие моменты времени, разделенные заданным интервалом, поочередное изменение (увеличение или уменьшение) значения давления, приложенного к первому тормозному приводу, и значения давления, приложенного ко второму тормозному приводу.
Как будет более очевидно далее, из-за этих характеристик в тормозной системе, в соответствии с настоящим изобретением, число активаций электромагнитных клапанов первого и второго электропневматического блока резко уменьшается.
Это приводит к значительному продлению срока службы указанных электромагнитных клапанов и удлинению интервала между последовательными операциями по их обслуживанию.
Другие характеристики и преимущества изобретения будут очевидны из следующего подробного описания, которое дается исключительно в виде неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
- Фигура 1 - схема, частично в блочном виде, части пневматической тормозной системы для железнодорожного транспорта;
- Фигура 2 - схема варианта осуществления изобретения;
- Фигура 3 - схематическое изображение пневматической тормозной системы для железнодорожного транспорта в соответствии с настоящим изобретением;
- На фигуре 4 показан вариант системы согласно фигуре 3;
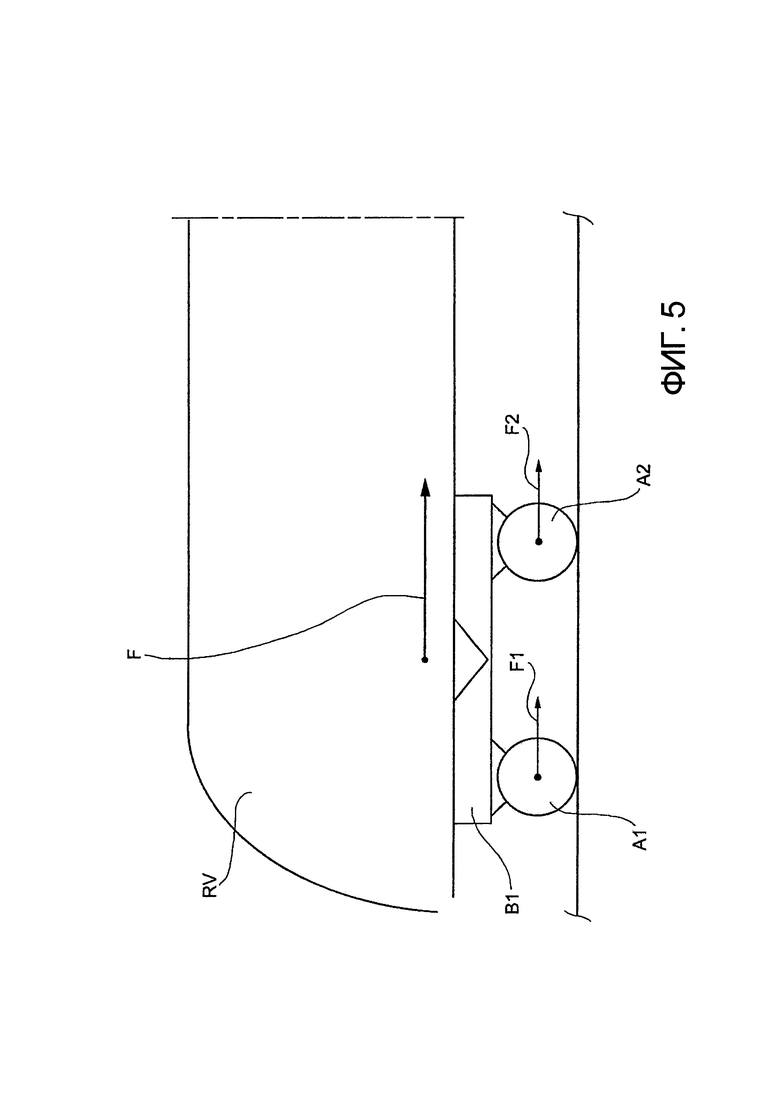
- Фигура 5 - частичное схематическое изображение железнодорожного транспортного средства;
- На фигуре 6 - график, показывающий в функциональной зависимости от времени t, отложенной на горизонтальной оси, примеры изменения давлений в пневматической тормозной системе в соответствии с известным уровнем техники;
- На фигуре 7 показан график, аналогичный, показанному на фигуре 6, и показан рабочий режим пневматической тормозной системы в соответствии с настоящим изобретением; а также
- на фигурах 8 и 9 показаны графики, аналогичные графику, показанному на фигуре 7, и показана динамика давления в двух разных режимах приведения в действие систем в соответствии с настоящим изобретением.
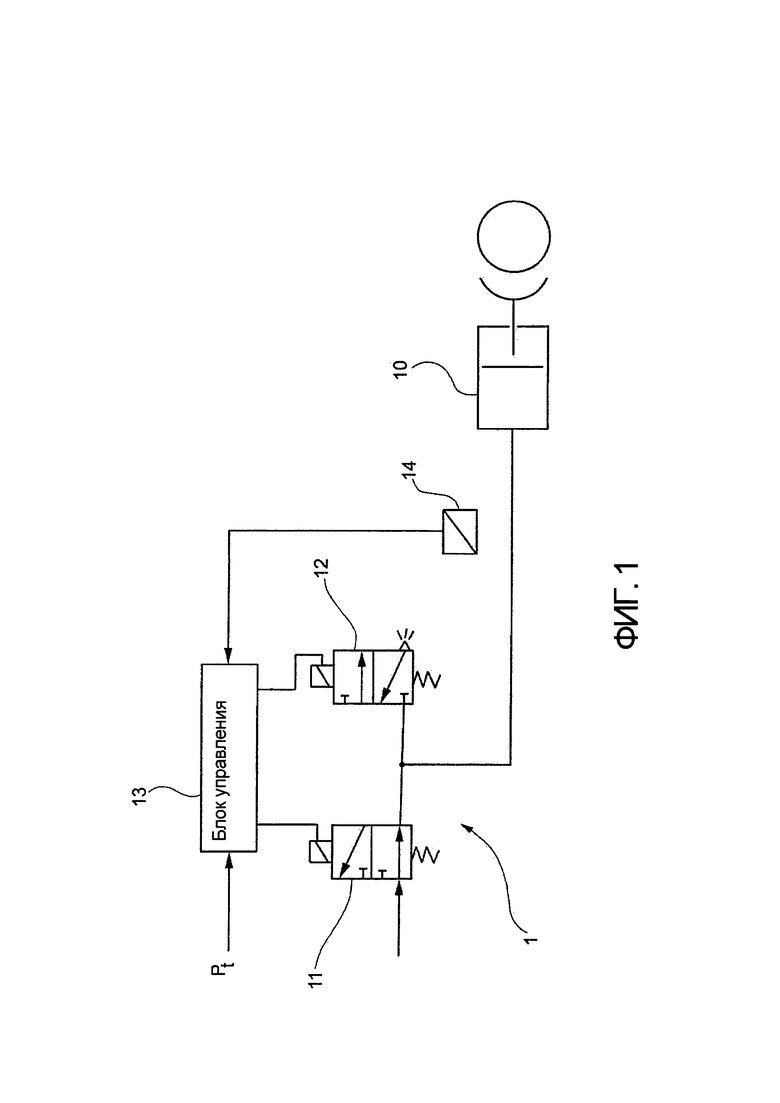
Фигура 1 является частичной иллюстрацией тормозной системы для железнодорожного транспорта.
На этом фигуре номером 1 обозначен электропневматический блок управления, связанный с тормозным приводом (тормозным цилиндром) 10.
Электропневматический блок 1 содержит впускной электромагнитный клапан 11 и выпускной электромагнитный клапан 12, также известные как наполнительный и сливной электромагнитные клапаны соответственно, управляемые электронным блоком (ECU) 13, чтобы вызвать увеличение и уменьшение соответственно пневматического тормозного давления, подаваемого на тормозной цилиндр 10.
Датчик давления 14, связанный с выпуском электромагнитного клапана 11 или с впускным отверстием тормозного цилиндра 10, подает блоку управления 13 сигнал, указывающий тормозное давление, приложенное к тормозному цилиндру 10.
Блок управления 13 принимает на своем входе сигнал, указывающий целевое тормозное давление Pt, в функциональной зависимости от которого этот блок управляет электромагнитными клапанами 11 и 12 в соответствии с заданными режимами.
Электромагнитные клапаны 11 и 12 - это клапаны трех-ходового, двух-позиционного типа, и с отключенным питанием они принимают условие, изображенное на фигуре 1: клапан 11 подает давление на тормозной цилиндр 10, когда клапан 12 закрыт.
На фигуре 2 показана другая частичная схема тормозной системы. На этой фигуре, частям и элементам, упомянутым ранее, были присвоены те же буквенно-цифровые обозначения, используемые ранее.
На схеме, изображенной на фигуре 2, выход впускного электромагнитного клапана 11 и входное отверстие выпускного электромагнитного клапана 12 (узловая точка 15) соединены с управляющей камерой 16 ускорительного клапана 17, который получает на своем входе пневматическое давление, которое на выходе модулируется давлением в камере 16, чтобы приложить модулированное тормозное давление к входу тормозного цилиндра 10.
На схемах обеих фигур 1 и 2 блок управления 13 управляет электромагнитными клапанами 11 и 12 в импульсным режиме с помощью соответствующего алгоритма управления замкнутым контуром, так что давление на входе в тормозной цилиндр 10 находится, по меньшей мере приблизительно равным значению целевого тормозного давления Pt.
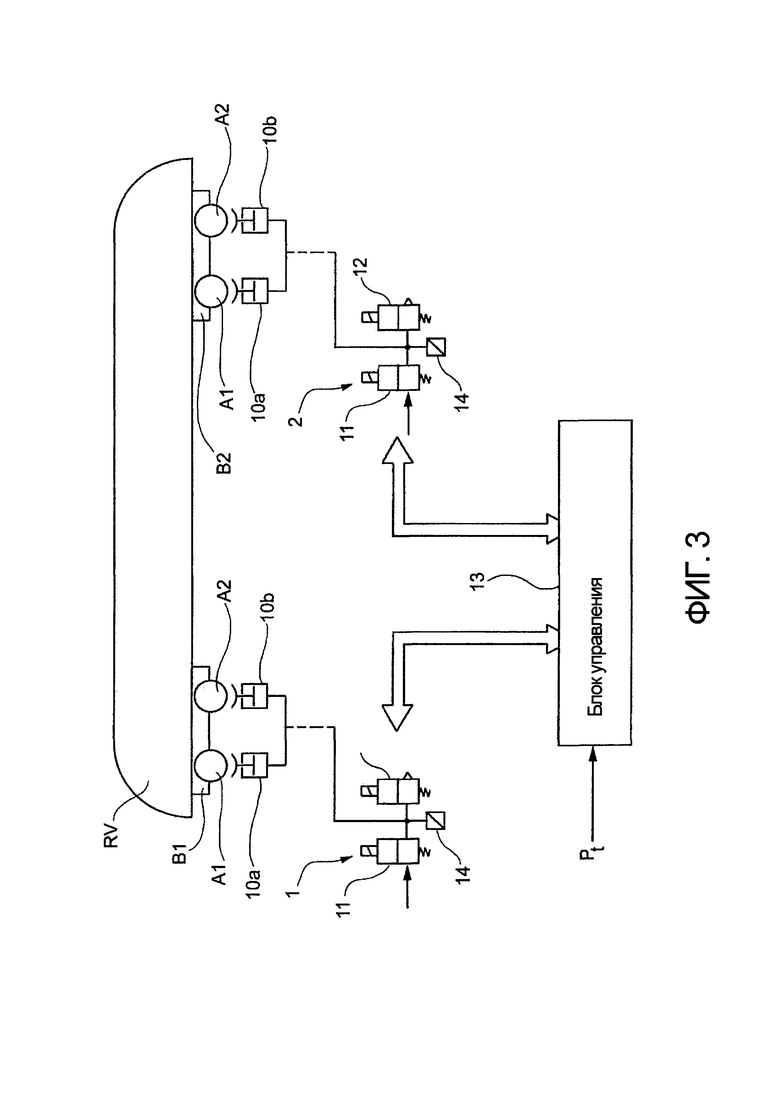
Простые схемы на фигурах 1 и 2 можно дополнить, чтобы создать пневматическую тормозную систему, в которой тормозное давление управляется тележка за тележкой, как показано на фигуре 3. На этом чертеже также частям и элементам описанным выше, были назначены те же обозначения, что и ранее.
На фигуре 3 схематически изображено железнодорожное транспортное средство RV, имеющее две тележки В1 и В2, каждая из которых содержит две оси А1 и А2, с которыми связаны соответствующие тормозные цилиндры 10а и 10b.
Тормозные цилиндры, связанные с осями тележки В1, управляются электропневматическим блоком управления 1, как описано выше, в то время как тормозные цилиндры, относящиеся к осям тележки В2, управляются эквивалентным, но независимым электропневматическим блоком 2.
Два электропневматических блока управления 1 и 2 управляются одним и тем же блоком управления 13 в зависимости от величины целевого тормозного давления Pt.
Согласно схеме фигуры 3, управление торможением «тележка за тележкой» реализовано без использования ускорительных клапанов, то есть в соответствии с принципиальной схемой, описанной выше со ссылкой на фигуру 1. Очевидно, что управление торможением также может быть реализовано в соответствии со схемой, предусматривающей использование двух ускорительных клапанов, управляемых электропневматическими блоками 1 и 2, в соответствии со схемой, описанной выше со ссылкой на фигуру 2.
Согласно схеме на фигуре 3 целевое тормозное давление Pt равно целевому тормозному усилию, которое должно одновременно прилагаться к каждой тележке В1 иВ2.
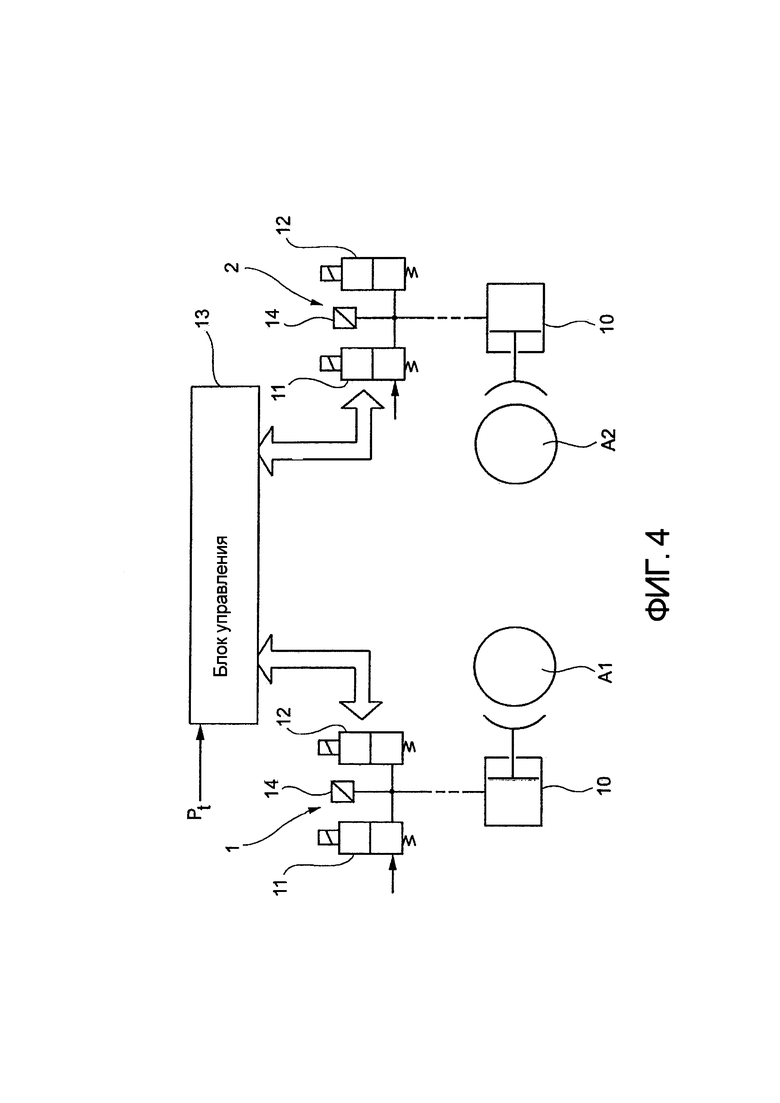
В качестве альтернативы конфигурации согласно фигуре 3 и как частично показано на фигуре 4, управление торможением может быть реализовано в режиме «ось за осью». В этом случае целевое тормозное давление Pt представляет собой запрос на тормозное усилие, применяемое к отдельной тележке.
На фигуре 4, частям и элементам, упомянутым ранее, были присвоены те же условные обозначения, используемые ранее.
Согласно схеме на фигуре 4 в заданной тележке, содержащей две оси А1 и А2, соответствующий тормозной элемент 10 связан с каждой осью, и приложенное к нему тормозное давление управляется посредством соответствующего электропневматического блока 1 или 2, как описано выше.
Блок управления 13, показанный на фигуре 4, выполнен с возможностью преобразования на основе заранее заданного алгоритма запроса целевого тормозного давления, которое должно быть приложено к соответствующей тележке, в значение давления, которое должно быть приложено к тормозным цилиндрам 10 двух осей А1 и А2 этой тележки. Это значение давления, как правило, одинаково для двух осей и обычно контролируется с помощью так называемой «зоны нечувствительности», необходимой для управления в замкнутом контуре, чтобы обеспечить стабильное управление, предотвращая непрерывные колебания целевого значения. Амплитуда так называемой «зоны нечувствительности» обычно выбирается равной или близкой к максимально допустимой ошибке в системе контроля давления.
Хотя по существу одно и то же значение тормозного давления должно применяться к обеим осям, электронный блок 13 управляет электропневматическими блоками управления 1 и 2 таким образом, чтобы управлять блоками 1 и 2 полностью независимым образом. Такой метод оправдывается необходимостью модулировать давление торможения независимо друг от друга между двумя осями, например, во время появления пробуксовки колеса, где происходит плохое сцепление колес с рельсами.
Можно показать, что, за исключением случая пробуксовки колес, для равных значений давления торможения, применяемого к осям, блок управления 13 управляет электромагнитными клапанами 11 и 12 двух электропневматических блоков 1 и 2 с одинаковым в среднем количеством импульсов возбуждения. Аналогичное рассмотрение имеет значение в случае системы, показанной на фигуре 3, когда объемы тормозных цилиндров, связанных с двумя тележками В1 и В2, равны, и когда давление торможения, которое должно применяться к двум тележкам В1 и В2, является одинаковым.
Как упомянуто во вводной части настоящего описания, изобретение предназначено для уменьшения количества импульсов подачи питания, подаваемых в электромагнитные клапаны электропневматических блоков 1 и 2, связанных с двумя тележками транспортного средства (как на схеме фигуры 3) или с двумя осями одной и той же тележки (как на схеме фигуры 4).
Это делается таким образом, который будет теперь подробно описан со ссылкой на фигуры 5-9.
Последующее описание относится к управлению «ось за осью», то есть управлению в соответствии со схемой, изображенной на фигуре 4. Однако последующее описание также верно, с необходимыми изменениями, для управления «тележка за тележкой».
Со ссылкой на фигура 5 тормозная сила F(t), передаваемая за время (t) от тележки В1 к транспортному средству RV, является результатом суммы двух тормозных сил Fl(t) и F2(t), вызываемых посредством отдельных осей А1 и А2 тележки в результате торможения, приложенного к ним соответствующими тормозными цилиндрами; то есть,

Чтобы получить определяемую тормозную силу F(t), не обязательно, чтобы выражение F1(t)=F2(t)=F(t) / 2 было постоянно истинным; то есть, нет необходимости, чтобы одно и то же значение тормозного давления было приложено к тормозным цилиндрам обеих осей тележки.
Вместо этого просто необходимо, чтобы уравнение (1), упомянутое выше, было верно для любого значения F1(t)≤F(t) при условии, что значение F1(t) не превышает значение силы сцепления, доступной для оси А1, в противном случае может произойти пробуксовка колес.
Аналогично, уравнение (1) справедливо для любого значения F2(t)≤F(t) при условии, что значение F2(t) не превышает значение силы сцепления, доступного для оси А2, по причине упомянутой выше.
Блок управления 13 выполнен с возможностью управления электропневматическими блоками 1 и 2, связанными с тормозными цилиндрами осей А1 и А2, посредством импульсов подачи питания, периодически подаваемых на электромагнитные клапаны этих блоков с периодом Т.
Если в ходе управления в данный момент времени, соответствующего (n+1) периоду Т, согласно заданному целевому тормозному давлению Pt, тележка В1 должна приложить к транспортному средству RV новое значение силы F(n+1)=F(n)+ΔF(n+1), где ΔF(n+1) - увеличение силы, применяемое относительно предыдущего значения силы F(n), нет необходимости использовать сбалансированный увеличение F1(n+1)=F2(n+1)=[F(n)+ΔF(n+1)] / 2; вместо этого все увеличение может просто применяться только к одной из двух осей, например оси А1, и в этом случае

или все увеличение может быть отнесено к оси А2, и в этом случае

Значение силы F(n) соответствует значению давления Р (n)⋅K, где K - постоянная, которая «суммирует» все механические параметры преобразования от силы к давлению, а именно площадь поверхности поршня тормозного цилиндра, отношение плеч рычага тормозного суппорта, коэффициент трения тормозных колодок и т.д.
Подставляя эквивалентные значения давления Р для силы F, уравнения (2) и (3) можно переписать следующим образом:

В тормозной системе, согласно изобретению, блок управления управляет поочередными изменениями ΔF(n+1), ΔF(n+2), …, ΔF(n+m), применяемыми к тележке, соответствующие последовательным изменениям давления ΔР(n+1), ΔР(n+2), ΔР(n+m), поочередно использующиеся в каждом вариационном уравнении (4) и уравнении (5), как показано выше, в соответствии со следующей последовательностью:
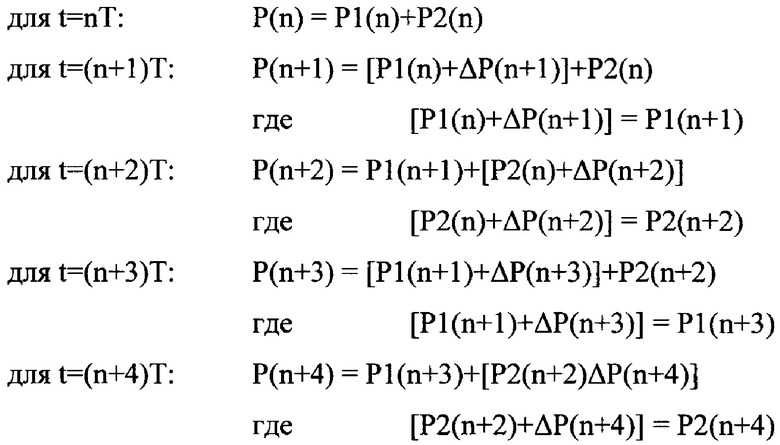
и так далее.
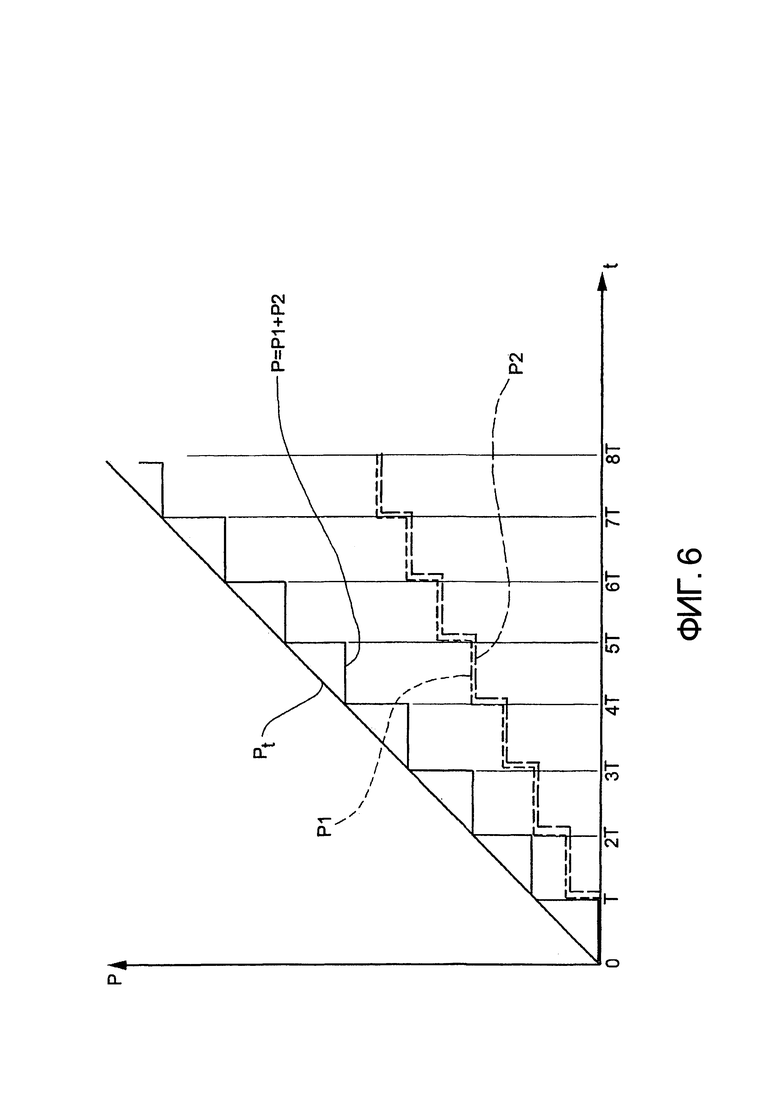
На фигуре 6 представлен график временной зависимости, показывающий тенденции изменения давления по вертикальной оси в зависимости от времени t, отложенной по горизонтальной оси.
На фигуре 6 показан режим управления для контроля электропневматических блоков управления, связанных с двумя осями тележки, в соответствии с известным уровнем техники.
На этом фигуре восходящая непрерывная линия Pt представляет заданное целевое тормозное давление, пропорциональное общей силе, которая должна быть приложена к тележке.
Пунктирная линия с короткими штрихами Р1 и пунктирная линия с длинными штрихами Р2 отображают тенденцию изменения целевых тормозных давлений, которые должны применяться к тормозным цилиндрам, связанным с осью А1 и осью А2 соответственно.
В каждый период обновления с длительностью Т эти давления увеличиваются на величину ΔР/2.
Непрерывная ступенчатая линия Р представляет собой сумму двух давлений Р1 и Р2 и равна значению целевого тормозного давления Pt в конце каждого периода обновления с длительностью Т.
Очевидно, что чем короче период обновления Т, тем ближе результирующее давление Р будет приближаться к тенденции изменения целевого давления Pt.
Однако, в соответствии с известным уровнем техники, показанному выше со ссылкой на Фигура 6, впускные электромагнитные клапаны двух электропневматических блоков одновременно включаются в каждый период обновления Т.
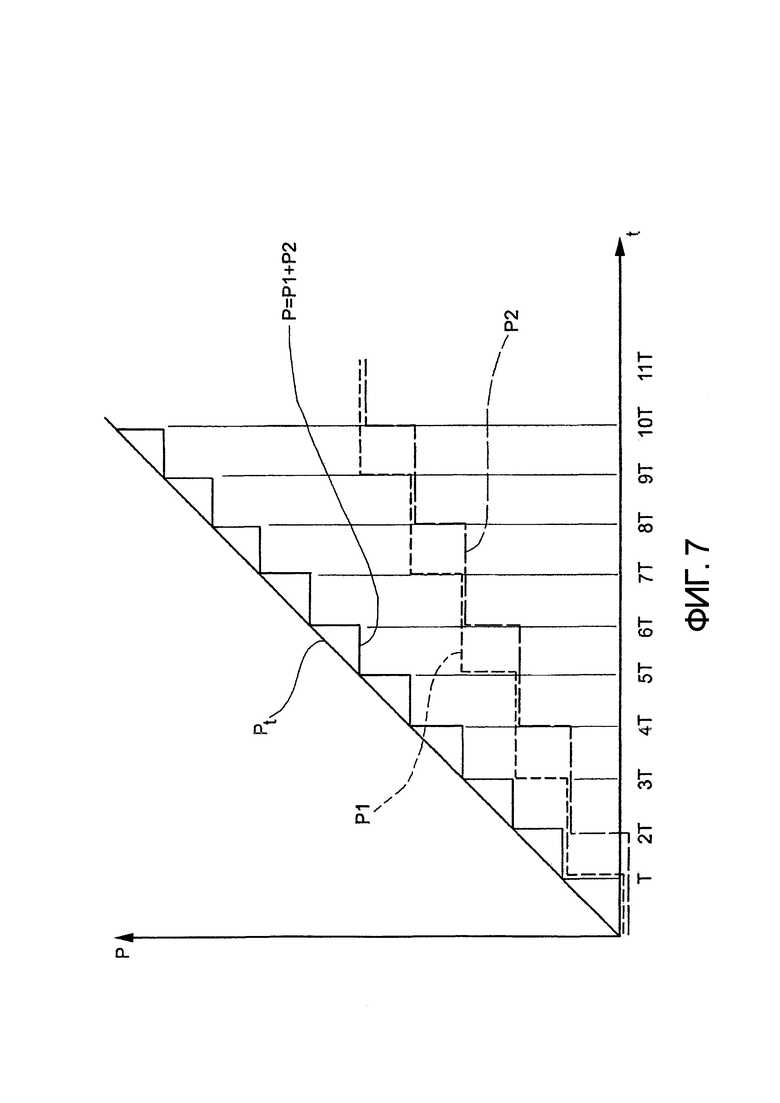
В тормозной системе, согласно изобретению, блок управления 13 выполнен с возможностью управления электромагнитными клапанами электропневматических блоков 1 и 2 способом, который будет описан ниже со ссылкой на фигуру 7. На этом фигуре символы Pt, Р, P1 и Р2 имеют те же значения, что и упомянутые выше в описании на фигуре 6.
Как можно видеть на фигуре 7, согласно изобретению, блок управления 13 в последовательных периодах обновления с продолжительностью Т попеременно активирует впускной электромагнитный клапан первого электропневматического блока 1 и впускной электромагнитный клапан второго электропневматического блока 2.
То есть, в общем обновленном интервале или периоде с длительностью Т торможение, связанное с одной осью тележки, сохраняется при предыдущем значении, тогда как значение давления торможения, приложенного к другой оси, увеличивается. Это можно выполнить путем поочередного изменения заданных значений давления для впускных электромагнитных клапанов двух электропневматических блоков 1 и 2.
Как видно из сравнения фигур 6 и 7, общее давление Р=P1+Р2 при управлении согласно фигуре 7 проявляет, по существу, ту же тенденцию, что и при управлении согласно фигуре 6, но количество возбуждений электромагнитных клапанов двух электропневматических блоков 1 и 2 по существу уменьшено вдвое.
Таким образом, срок службы указанных электромагнитных клапанов существенно удваивается, а интервалы между последовательными операциями по техническому обслуживанию существенно уменьшаются вдвое.
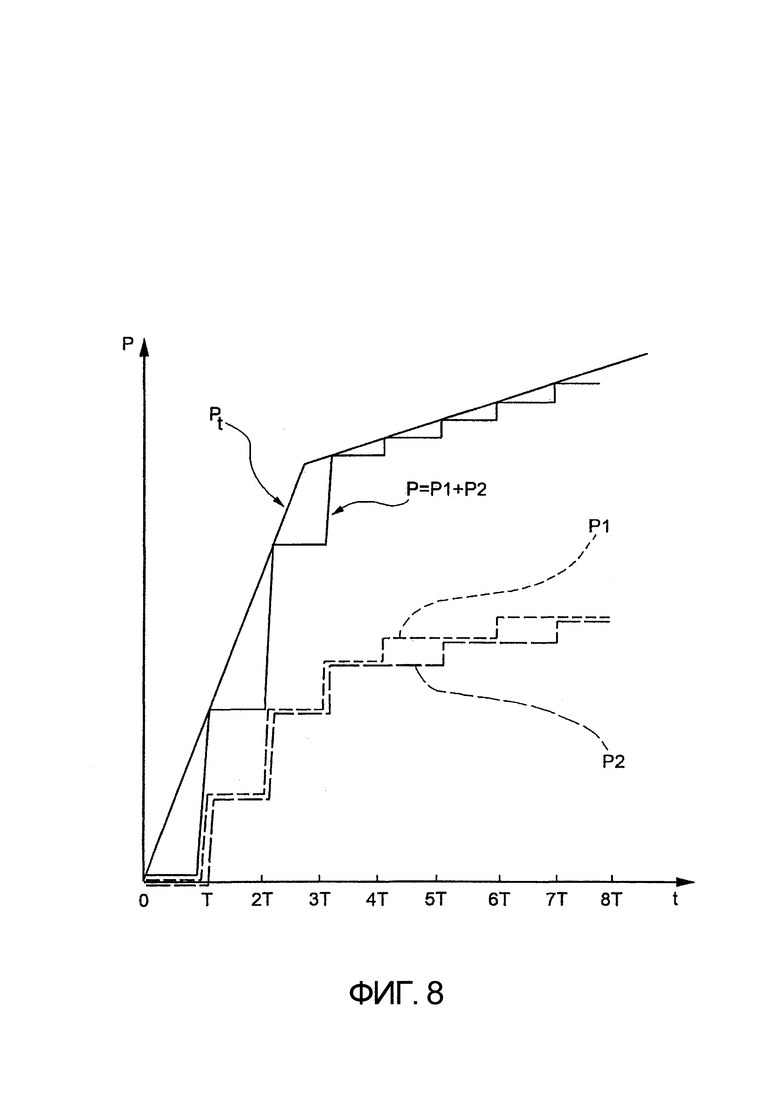
Когда направление целевого тормозного давления Pt имеет довольно высокий наклон, как и в исходной части фигуры 8, увеличение давления торможения ΔР, которое должно применяться в каждом интервале обновления или периоде с длительностью Т, может достигать довольно высоких значений. В каждый период Т приложение довольно высокого давления, которое увеличивается по одной оси тележки может вызвать чрезмерный дисбаланс сил, действующих продольно на тележку.
В такой ситуации, как показано на графиках фигуры 8, когда направление целевого давления Pt имеет довольно высокий наклон, превышающий заданное значение, блок управления 13 может по существу работать так, как описано выше со ссылкой на фигуру 6, с равным увеличением АР/2, сообщаемым одновременно тормозным элементам двух осей.
Когда наклон направления целевого давления Pt впоследствии падает ниже заданного значения, как показано в правой части фигуры 8, блок управления 13 реализует управление тормозными давлениями, как описано выше со ссылкой на фигуру 7, то есть путем поочередного применения повышения давления к тормозным элементам одной и другой оси.
В целом, даже в ситуации типа, показанной на фигуре 8, система в соответствии с изобретением может обеспечить значительное уменьшение количества возбуждений электромагнитных клапанов двух электропневматических блоков.
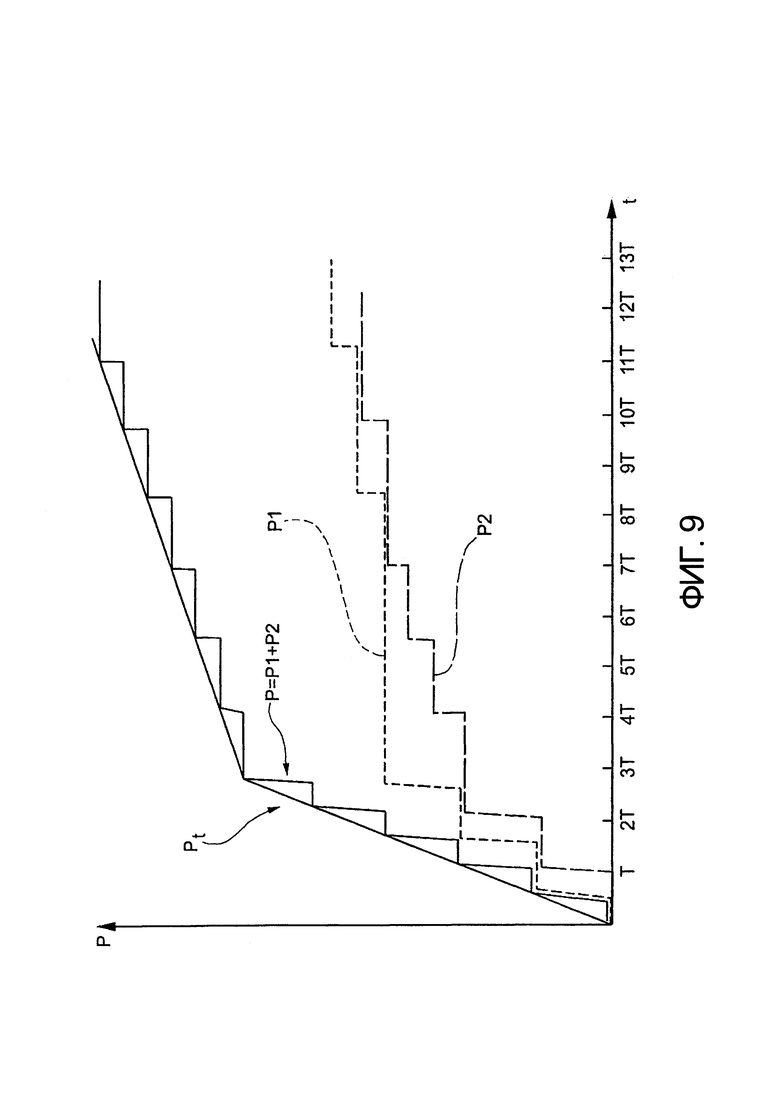
На фигуре 9 показаны направления изменения давления в альтернативном варианте, показанному на фигуре 8.
В варианте, показанном на фигуре 9, когда направление целевого тормозного давления Pt имеет наклон выше заданного значения, блок управления 13 все еще управляет попеременно электромагнитными клапанами двух электропневматических блоков 1 и 2, но с уменьшенным периодом обновления (равным Т/2 в примере на фигуре 9): соответственно увеличения давления, которые попеременно применяются к тормозным элементам двух осей уменьшаются.
Как только наклон целевого тормозного давления Pt падает ниже упомянутого заданного значения, блок управления 13 сохраняет более высокое давление (Р1 на фигуре 9) неизменным и, путем последовательного увеличения, доводит высокое давление (Р2) до значения, равного первому (Р1), с периодом обновления, равным или, если необходимо, большим, чем Т.
После того, как два давления Р1 и Р2 были уравнены друг с другом, блок управления 13 возобновляет попеременное управление двумя электропневматическими блоками управления 1 и 2, по существу, как описано со ссылкой на фигуру 7.
Очевидно, что приведенное выше описание применимо, с учетом соответствующих изменений, к случаю, когда целевое тормозное давление Pt уменьшается.
Очевидно, что при условии сохранения принципа изобретения, формы применения и варианты осуществления изобретения могут значительно отличаться от того, что описано и проиллюстрировано исключительно в качестве неограничивающего примера, не отходя тем самым от объема охраны изобретения, определенного в прилагаемой формуле изобретения.

Пневматическая тормозная система включает в себя первый и второй тормозные приводы (10), связанные с колесами соответствующей оси (A1, А2) или соответствующей тележкой (B1, В2) железнодорожного транспортного средства (RV) и к которым подключены первый и второй электропневматические блоки управления (1, 2), каждый из которых содержит впускной (11) и выпускной (12) электромагнитные клапаны, предназначенные для увеличения и уменьшения пневматического давления, подаваемого на тормозной привод (10), и блок управления (13), выполненный с возможностью управления электропневматическими блоками управления (1, 2) так, что соответствующие значения тормозного давления (P1, Р2) применяются к тормозным приводам (10), сумма этих давлений (Р) равна значению целевого давления (Pt), и так, что электропневматические блоки (1, 2) управляются поочередно, по меньшей мере, на заданный временной интервал, чтобы вызвать в последующие моменты времени, разделенные заданным интервалом (Т), поочередное изменение значения давления (Р1), применяемого к первому тормозному приводу, и значения (Р2) давления, приложенного ко второму тормозному приводу (10). Технический результат – продление срока службы электромагнитных клапанов и удлинение интервала между последовательными операциями по их обслуживанию. 3 з.п. ф-лы, 9 ил.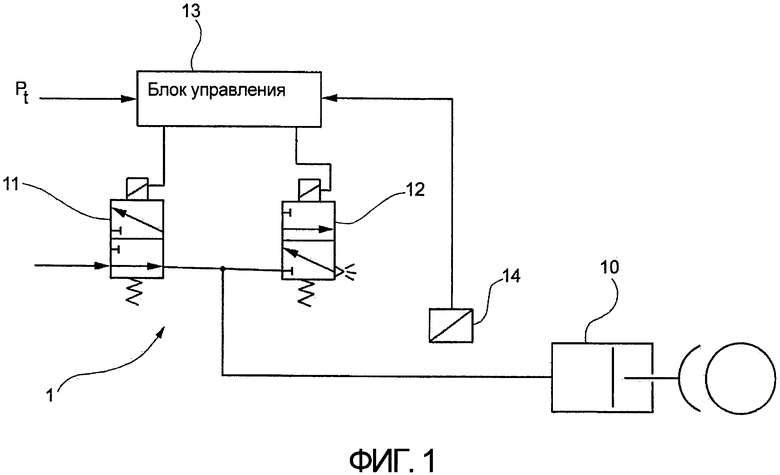
1. Пневматическая тормозная система для железнодорожного транспорта (RV), включающая в себя
первый и второй тормозные приводы (10), связанные с колесами соответствующей оси (A1, А2) или соответствующей тележкой (B1, В2) транспортного средства (RV) и к которым подключены первый и второй электропневматические блоки управления (1, 2) соответственно, каждый из которых независим друг от друга и содержит впускной электромагнитный клапан (11) и выпускной электромагнитный клапан (12), предназначенные для увеличения и уменьшения соответственно пневматического давления, подаваемого на соответствующий тормозной привод (10), и
блок управления (13), выполненный с возможностью управления упомянутыми первым и вторым электропневматическими блоками (1, 2) в зависимости от целевого тормозного давления (Pt) таким образом, чтобы упомянутые первый и второй электропневматические блоки управления (1, 2) вызывали применение соответствующих давлений (P1, Р2) к соответствующему первому или второму тормозному приводу (10);
упомянутый блок управления (13), выполненный с возможностью контроля указанных первого и второго электропневматических блоков управления (1, 2), так что соответствующие значения тормозного давления (P1, Р2), сумма (Р) которых практически равна значению целевого давления торможения (Pt), подаются на тормозной привод (10);
отличающаяся тем, что блок управления (13) выполнен с возможностью контроля, по меньшей мере, в течение заданного временного интервала первого и второго электропневматических блоков управления (1, 2) чередующимся образом, чтобы вызвать в последующие промежутки времени, разделенные заданным интервалом (Т), поочередные изменения значения давления (Р1), применяемого к первому тормозному приводу, и значения давления (Р2), применяемого ко второму тормозному приводу (10).
2. Пневматическая тормозная система по п. 1, в которой длительность заданного временного интервала (Т) является переменной в функциональной зависимости от скорости изменения целевого тормозного давления (Pt).
3. Пневматическая тормозная система по п. 1, в которой блок управления (13) выполнен с возможностью управления первым и вторым электропневматическими блоками управления (1, 2) синхронно, когда скорость изменения целевого тормозного давления (Pt) превышает заданное значение.
4. Пневматическая тормозная система по п. 1, в которой блок управления (13) выполнен с возможностью управления первым и вторым электропневматическими блоками управления (1, 2), чтобы существенно уравнять значения давлений (P1, Р2), применяемых к первому и второму тормозным приводам (10), когда скорость изменения целевого тормозного давления (Pt) ниже заданного значения.
| JP S5819102 A, 04.02.1983 | |||
| ПУЛЬСИРУЮЩИЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2006 |
|
RU2362034C2 |
| US 6682154 B1, 27.01.2004. | |||

