Изобретение относится к рыбному хозяйству и предназначено для использования в системах контроля и подсчета рыб при их проходе к местам нереста в мелководных реках.
Актуальность данного изобретения вызвана тем, что для определения квот вылова рыб, идущих на нерест, и в особенности ценных пород, таких как кета, горбуша, омуль и другие, заходящих на нерест в мелководные небольшие реки и ручьи Сахалина, Камчатки, Кавказа и других регионов, необходимо знать какое количество рыб прошло на нерест. Имеющиеся способы и аппаратурные реализации не позволяют выполнять такой подсчет в реках со сложной гидрологией:
- глубины в местах измерения от 10 до 100 см, изменяющиеся также в течение суток за счет дождей, неравномерного нагрева и таяния льда и снега;
- скорости течения воды в местах измерений различные, и также изменяются во времени;
- дно имеет сложную структуру с наличием перекатов, участков с различными освещенностями и цветовыми характеристиками;
- имеет место периодический случайный проход по реке бревен, веток и других объектов;
- места измерений труднодоступны и удалены от населенных пунктов.
Рассмотрим имеющуюся аппаратуру для подсчета рыб с точки зрения возможности ее применения в реках с данной гидрологией.
Имеются гидроакустические системы [1-3] выполняющие подсчет проходящей рыбы. Каждое такое устройство содержит, как правило, электронный приемо-излучающий блок, блоки обработки и индикации, гидроакустические антенны в количестве одна или больше, располагаемые в водной среде. В приемо-излучающем блоке периодически вырабатываются электрические зондирующие сигналы, поступающие на гидроакустические антенны, излучающие в водную среду акустические зондирующие сигналы. Эти сигналы распространяются в воде, отражаются от находящейся там рыбы, а также от дна или от границы раздела вода-воздух и принимаются теми же или другими антеннами. Электрические сигналы, соответствующие этим отраженным сигналам, с антенн поступают на вход приемного тракта, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоке «Временная автоматическая регулировка усиления (ВАРУ)», преобразование аналогового сигнала в цифровой и другие операции) [4]. С выхода приемного тракта сигналы поступают на блок обработки, где происходит выделение эхосигналов от рыб и подсчет их количества. Результаты подсчета выводятся на блок индикации и/или могут храниться в памяти блока обработки и передаваться по проводному или радиоканалу на внешний блок индикации.
Рассмотренные и другие имеющиеся гидроакустические системы не могут использоваться на мелких реках со сложным рельефом дна. Это объясняется тем, что все гидроакустические системы имеют, так называемую, мертвую зону, в которой невозможен процесс выделения эхосигналов от рыб. Ее величина соизмерима с глубинами данных рек и может достигать единиц-десятков сантиметров. Повышение частоты лоцирования уменьшает величину мертвой зоны, но одновременно уменьшает ширину контролируемой водной зоны [4]. При вертикальном лоцировании, когда гидроакустические антенны располагаются на дне, и выполняют лоцирование вверх, или располагаются в верхней части водной среды и выполняют лоцирование вниз в сторону дна, количество гидроакустических антенн для полного перекрытия зоны контроля, например, шириной 10 метров и диаметре преобразователя 4 см может достигать 200 штук.. При больших перепадах глубин размеры слоев воды перед каждой антенной могут быть разными и кроме того значительно меняться в течение суток, что значительно затрудняет формирование строба для выделения эхосигналов от рыб из всей последовательности отраженных сигналов. При наличии перекатов уровень воды будет претерпевать быстрые изменения, что еще больше усложнит задачу выделения эхосигналов от рыб. Каждая из антенн должна подключаться к своему приемо-излучающему каналу, и реализация гидроакустической системы с таким количеством каналов, с учетом ее траспортабельности, установки и долговременной эксплуатации с автономным электропитанием практически невозможна.
При лоцировании в горизонтальном направлении количество каналов может быть меньше, однако будут наблюдаться значительные отражения зондирующих акустических сигналов от неоднородностей дна, а также от границы раздела вода-воздух, что сделает невозможным процедуру выделения эхосигналов от рыбы.
Имеются также системы для подсчета рыб, работа которых основана на измерении изменений электрического сопротивления участков воды при прохождении через них рыб [5-6]. Они содержат, как правило, следующие основные блоки: источник питания, электродные датчики, блок измерения сопротивления участка воды между электродами, блоки обработки и счета. При прохождении рыбы около электродов, сопротивление участка воды между ними изменяется, это изменение регистрируется, и количество таких изменений подсчитывается как проход рыбы.
Недостатками таких и аналогичных систем является их малый радиус действия. Поэтому для рек с шириной порядка нескольких десятков метров количество электродов, и блоков измерения сопротивления может достигать нескольких сотен, что практически нереализуемо.
Имеются устройства для подсчета рыб, использующие оптические способы регистрации [7-12].
В патенте [7] предложено устройство, содержащее счетные каналы, через которые пропускают рыбу. В каждом счетном канале имеются несколько излучающих светодиодов, и расположенные напротив них фотоприемники. При прохождении рыбы происходит затенение фотоприемников, величина тока через них изменяется, и это изменение регистрируют как проход рыбы.
В патенте [8] предложено устройство аналогичное устройству, описанному в патенте [7], в котором дополнительно исключена возможность повторного счета рыб при их прохождении в разных направлениях, что повышает общую точность измерений. Также в устройстве дополнительно выполняют измерения длины проходящей рыбы.
В патенте [9] предложены способ и устройство для подсчета, измерения размеров, выделения и классификации движущихся объектов, в частности живой рыбы, например молодого лосося. Рыба в измерительном канале проходит мимо измерительных устройств, где пересекает один или несколько лучей света перпендикулярных направлению движения рыбы. Лучи света расположены на фиксированных расстояниях. Когда рыба проходит устройство и прерывает лучи света, измеряется время, необходимое рыбе для перемещения фиксированного расстояния между лучами света. Все измерительные данные вводятся в микрокомпьютер, подключенный к устройству. По результатам измерений выполняется подсчет рыбы и ее разделение на различные размерные группы.
В патенте [10] предложено счетное устройство для рыбы, представляющее собой трубу одним концом прикрепленную к сосуду, содержащему подсчитываемое количество рыб. В трубе создается поток воды, который к выходному концу этой трубы имеет более высокую скорость. Рыба плывет внутри этой трубы, проходит через устройство подсчета, которое может быть реализовано на основе пересечения ею оптических или акустических лучей.
В патенте [11] предложены способ и устройство для подсчета рыбы в садках, которые могут быть использованы и для подсчета рыбы проходящей в реках. Счетное устройство содержит надводную часть, в которой предусмотрены блок индикации и источник питания, а также подводную часть, состоящую из матрицы N излучателей и приемников, укрепляемых на рамке. Излучатели и приемники могут быть оптическими, акустическими или инфракрасными. Если на пути распространения используемых лучей появляется объект, например рыба, уровень принимаемого сигнала падает, и такое изменение уровня регистрируется, как прохождение рыбы и составит единицу ее счета.
В патенте [12] предложены способ регистрации и оценки веса рыбы, а также устройство для его осуществления. Рыба перекачивается или проплывает через трубчатый канал круглого или прямоугольного сечения, изготовленного из прозрачного материала. По наружному периметру канала установлены источники света и приемники света, представляющие собой линейку приборов с зарядовой связью - «ПЗС-датчики», подключенные к процессору оптического сигнала OSP, соединенного с блоком обработки данных SDP. Все блоки SDP подключены к коммуникационному блоку CU, соединенному также с компьютером. Прозрачная область трубы и датчики окружены кожухом, для защиты от наружного света. Каждый ПЗС-датчик имеет сектор записи, который перекрывает сектора записи соседних ПЗС-датчиков. Источник света представляет собой непрерывную цепь светодиодов, которые охватывают 1/8 часть окружности трубы.
По мере поступления одной рыбы в канал один из источников света начинает светиться в течение короткого периода времени, а противоположно расположенные ПЗС-датчики производят запись данных. После этого включают другой источник света и делают записи данных с других ПЗС-датчиков. Таким образом, запись продолжается последовательно по окружности трубчатого канала. При этом ПЗС-датчики регистрируют не только прошедший свет, но и свет, отраженный от рыбы.
Процессор ОСП управляет источниками света и ПЗС-датчиками, а также выполняет их активацию по мере записи информации о положении и профиле рыбы. Блоки SDP записывают и обрабатывают данные из OSP. Блок CU получает данные от всех блоков SDP для обработки. Данные далее передают в компьютер через сеть или через USB-порт. Компьютер обрабатывает данные для определения количества рыб, объема и скорости перемещения каждой рыбы или групп рыб и их веса.
Перечисленные оптические устройства подсчета рыб не могут использоваться на реках со сложной гидрологией, так все они предусматривают наличие измерительных каналов или рамок, через которые происходит прохождение рыбы. Такие каналы или рамки расположены в русле реки, в процессе работы могут быть забиты или повреждены проплывающими бревнами, ветками или другими объектами. При массовом ходе рыбы на нерест для ее пропуска необходимо значительное число каналов, что увеличивает общие габариты и массу всей системы. Причем, количество каналов также необходимо выбирать с учетом периодических изменений глубины реки. Их установка требует значительных временных и материальных затрат.
Имеются телевизионные системы [13-17], также выполняющие подсчет рыб в измерительных каналах или прозрачных трубах.
В патенте [13] предложено устройство для количественного учета молоди рыб, выпускаемой из выростных прудов, содержащее учетный канал, телевизионный датчик, анализатор геометрических параметров изображений на плоскости дна учетного канала и счетно-логический блок.
Анализатор геометрических параметров изображений объектов распознает изображение молоди рыб на плоскости учетного лотка среди изображений тех объектов, которые движутся в потоке воды вместе с молодью. В качестве признака распознавания молоди от нерыбных объектов используется различие геометрических параметров их изображений, параметров площадей, или коэффициентов формы изображений.
Молодь рыб, движется с потоком воды через учетный канал, поперечное сечение, которого в одном месте сканируется телевизионным датчиком, работающим в режиме однострочной развертки. Развертка изображений в продольном направлении осуществляется за счет движения молоди рыб и посторонних объектов с потоком воды. Видеоимпульсы с выхода телевизионного датчика поступают на вход анализатора геометрических параметров изображений, который определяет параметры изображений каждого объекта. Усредненные значения геометрических параметров, таких как площадь, периметр или коэффициент формы изображений молоди рыб и посторонних объектов отличаются друг от друга. Полученные параметры сравнивают с установленными заранее интервалами значений параметров изображений молоди рыб и по результатам сравнения выдают сигналы в блок счета, вырабатывающий импульсы счета, количество которых равно числу объектов, геометрические параметры которых соответствуют геометрическим параметрам изображений молоди рыб.
В патенте [14] предложено устройство для количественного учета молоди рыб, в котором по сравнению с устройством по патенту [13], выполняют дополнительную селекцию видов рыб. Для достижения указанной цели в устройство дополнительно введен анализатор моментных инвериантов изображений, подключенный к выходу телевизионного датчика и ко второму входу счетно-логической схемы.
В патенте [15] предложено устройство для количественного учета молоди рыб, в котором точность подсчета повышена по сравнению с устройством по патенту [13]. Для этого в устройство дополнительно установлены: датчик скорости потока воды и регулятор скорости потока, размещенные в учетном канале, при этом выход датчика скорости потока воды подключен к входам регулятора скорости потока и к телевизионному датчику. Датчик скорости потока воды измеряет величину скорости потока воды в учетном канале, и вырабатывает сигнал, поступающий на телевизионный датчик и изменяющий частоту сканирования. Кроме того, этот сигнал может быть подан на регулятор скорости потока, изменяющий расход потока воды через учетный канал.
В патенте [16] предложено устройство для счета и измерения размеров рыбы, переносимой водой в прозрачной трубе. Подсчет и измерение осуществляют с помощью видеокамеры, подсоединенной к компьютеру, выполняющему анализ изображений. Для устранения искажений объектов расположенных внутри трубы, толщина материала стенок трубы выполнена такой, что световой луч, направленный поперек трубы и касательный к внутренней стенке трубы, полностью отражается при попадании на внешнюю поверхность трубы. Эксперименты с камерой линейного сканирования показали хорошие результаты при измерении теневых областей на объектах, освещенных с противоположной стороны трубы.
В патенте [17] предложено устройство, подсчитывающее с высокой точностью популяции организмов таких, как креветки, рыба и другие объекты. Устройство имеет наклонные каналы, с протекающей в них водой. В секции подсчета, расположенной в середине наклонного канала, организмы регистрируются видеокамерой. На задней стороне поверхности подсчитывающего участка расположен осветительный механизм, который ортогонально облучает подсчитывающий участок белым рассеивающим светом. Сигналы с видеокамер поступают на блок обработки, где выполняется анализ полученных изображений и выделение изображений проходящих рыб, подсчитываемых в блоке счета.
В проспекте [18] представлена конструкция счетчика рыбы, использующего принципы технического зрения, и предназначенного для автоматического подсчета рыбы и ее биомассы, проходящей по трубопроводу, при сортировке и отгрузке на рыбоводных хозяйствах. Используется анализ видеоизображения с частотой 25 кадров в секунду. Счетчик реализован на современной аппаратной платформе DE1-SoC (FPGA+ARM) Altera. Счетчик выполняет подсчет с точностью до 98% и имеет пропускную способность до 10 рыб/с.
В работе [19] предложен видеосчетчик рыбы, выполняющий анализ двухмерных изображений с видеокамеры. Конструкция счетчика рыбы состоит из закрытого корпуса, в котором располагаются:
- прозрачная труба из оргстекла, в которой проходит рыба;
- блок светодиодной плоской равномерной подсветки;
- видеокамера, установленная в верхней части корпуса;
- вычислительный блок анализа видеоизображения;
- сенсорным дисплей, установленный в верхней части корпуса.
В случаях наличия в потоке рыбы, идущей друг на друге, предусмотрена установка резинового ограничителя на входе счетчика для того, чтобы снимать рыбу со «второго этажа». В качестве видеокамеры выбрана аналоговая купольная камера стандарта PAL с разрешением 720 × 576 пикселей. Большего разрешения не требуется, так как рыба на изображении имеет достаточно большой размер. Диаметр трубы может варьироваться от 160 до 200 мм в зависимости от требуемого диапазона размеров рыбы.
Из анализа экспериментальных видеозаписей сделан вывод о том, что используемая частота кадров 25 Гц обеспечит выделение рыбы на видеоизображении при ее прохождении со скоростью до 5-8 м/c. В основе алгоритма подсчета проходящей рыбы была заложена следующая последовательность операций: выделение пикселей по яркости, объединение пикселей в связные области, анализ и сопровождение связных областей. При подсчете, как только рыба отходит от левой границы кадра, происходит вычисление ее площади и длины, далее производится оценка количества рыбы в связной области в соответствии с ее площадью и длиной, и производится инкрементация счета. Ошибка подсчета рыбы составляет менее 1% при прохождении ее по трубе со скоростью не более чем 3 м/c и объемом до 5 рыб/c и с отклонением массы рыбы от среднего значения не более ±20%.
Устройства, предложенные в патентах [13-17] и работах [18, 19] используют телекамеру для подсчета количества рыб, а также для определения их параметров - размеров, веса и других. Телекамера, по сравнению с другими датчиками позволяет получать дополнительные данные о проходящей рыбе. Однако наличие в перечисленных устройствах измерительных каналов или прозрачных труб, по которым выполняется передвижение рыб, не позволяет использовать эти устройства на реках со сложной гидрологией.
Так как массовый ход рыбы на нерест происходит в течение длительного времени, например, для нерки с середины июля и до начала сентября [20], а эти каналы или рамки для измерений необходимо располагать в руслах рек, то в процессе работы они могут быть забиты или повреждены проплывающими бревнами, ветками или другими объектами. Численность проходящей за сутки рыбы может достигать 350 тыс. экземпляров [20], и для ее пропуска необходима установка значительного числа каналов, что увеличивает общие габариты и массу всей системы. Причем, количество каналов также необходимо выбирать с учетом периодических изменений глубины реки. Установка каналов для их долговременной надежной необслуживаемой работы требует значительных временных и материальных затрат.
Подсчет рыбы возможен и по фотографиям или видеозаписям, получаемым при аэроразведке рыбы [21-23]. Данный вид подсчета является бесконтактным, устройство получения информации - видеокамера располагается вне русла контролируемого водоема, что является преимуществом по сравнению с рассмотренными ранее устройствами. Анализ полученных видеоматериалов может выполняться в процессе или после окончания полета с использованием вычислительных устройств и специальных программных пакетов [24-25].
Однако аэроразведка рыбы может выполняться только периодически, ее результаты относятся только к ограниченным временным интервалам, и не могут выполнять постоянный мониторинг и подсчет проходящей рыбы. Стоимость одного часа полета в 2009 г. составляла порядка 90 тыс. руб. [23], что ограничивало количество часов аэроразведки. Кроме того в работе [21] отмечено, что для выполнения подсчета рыб при аэроразведке должны выполняться определенные погодные условия. Оптимальное время для наблюдений с 8-9 часов до 16-17 часов. Практически в большинстве случаев в августе и даже в первой половине сентября наблюдения возможны до 17-18 часов, после чего тени от берегов и прибрежной растительности резко ухудшают видимость рыбы. Благоприятными условиями погоды являются: горизонтальная видимость не менее 10 км, скорость ветра не более 10 м/сек., отсутствие облаков, или наличие 4-5-бальной облачности. При совершенно безоблачном небе аэровизуальным работам мешают солнечные блики на воде. Помехи в той или иной мере устраняются перемещением летательного аппарата по отношению к водоему и подбором соответствующего угла зрения относительно солнца и объекта наблюдений. Наблюдатель, не вооруженный оптическим прибором, обычно может хорошо различать с рабочей высоты полета предметы, размеры которых превышают 0,002 от высоты полета. В соответствии с этим максимальную высоту полетов над водной поверхностью выбирают не более 250 м для обнаружения рыб, например лососей длиной более 0.5 м. Видимость рыбы зависит не только от условий погоды, скорости и высоты полета, но и от состояния поверхности воды, ее прозрачности и цвета, рельефа дна водоема и его цвета, от характера растительности по берегам реки, от времени суток и от глубины, на которой находится рыба. Следовательно, наблюдения рыбы при аэроразведке возможны только периодически, при наличии определенной солнечной освещенности, при отсутствии значительного волнения, что ограничивает эксплуатационные возможности данного способа и реализующих его аппаратурных устройств.
В связи с этим является актуальной разработка устройства для долговременного непрерывного подсчета рыб проходящих на нерест в реках со сложной гидрологией, которыми является большинство рек Сахалина, Камчатки, Кавказа и других регионов.
Прототипом заявляемому устройству является устройство, для подсчета рыб, содержащее видеокамеру, расположенную над водой, и соединенную с последовательно соединенными блоками обработки и подсчета [21-23].
Перечисленные блоки и связи прототипа используются в заявляемом устройстве.
Основной задачей заявляемого изобретения является разработка устройства для долговременного непрерывного подсчета рыбы, проходящей на нерест в мелководных реках со сложной гидрологией. Причем, такое устройство должно работать автономно, без постоянного присутствия оператора.
Технический результат заявляемого изобретения заключается в возможности выполнения долговременного непрерывного подсчета рыбы, проходящей в мелководных реках со сложной гидрологией.
Технический результат достигается тем, что в известном устройстве для подсчета рыбы, содержащем видеокамеру, располагаемую над водой и соединенную с последовательно соединенными блоком обработки и блоком счета, дополнительно в пределах зоны видимости видеокамер поперек реки на дне расположена лента, цвет которой, контрастирует с цветом регистрируемых рыб и дна реки, лента содержит оптические излучающие элементы, соединенные с блоком обработки; количество видеокамер n выбирают таким, чтобы с их помощью можно было просматривать всю ширину реки.
Изобретение поясняется чертежами, на фиг. 1 показана функциональная схема заявляемого устройства в предпочтительном варианте, на фиг. 2 - вариант расположения видеокамер.
Устройство для подсчета рыбы содержит n видеокамер (1-1, 1-2…1-n), располагаемых над поверхностью воды 2 контролируемого участка реки; на дне реки 3 в пределах зоны видимости видеокамер, расположена лента 4 ориентированная поперек реки; цветовые характеристики ленты контрастируют с цветовыми параметрами регистрируемых рыб, а также, контрастируют с цветовыми параметрами дна реки; лента также содержит оптические излучающие элементы 5, соединенные с блоком обработки 6, который соединен также с блоком счета 7 и с видеокамерами (1-1, 1-2…1-n).
Количество видеокамер n выбирают таким, чтобы с их помощью можно было бы просматривать всю максимальную ширину L реки. Высоту расположения видеокамер над поверхностью воды H выбирают преимущественно в пределах 2-5 метров исходя из конструктивных соображений и параметров видеокамер. Чем выше расположены видеокамеры, тем больше будет у них ширина сектора обзора R, но тем меньше будут размеры наблюдаемых элементов в кадре. Одним из вариантов, как показано на фиг. 2, является укрепление видеокамер на поперечине 8, установленной на стойках 9, в качестве которых могут использоваться также и деревья, и элементы природного рельефа. Поперечина 8 может быть жесткой балкой или системой тросов, натянутых между стойками 9 или элементами горного рельефа берегов.
Рассмотрим вариант расчета количества видеокамер для контроля участка реки шириной L=10 м. Используем видеокамеры с размером матрицы А=1/3 дюйма и объективом с фокусным расстоянием F=4 мм. Ширина сектора обзора R будет равна [26]
R=H*A/F=2.116*H
При высоте расположения видеокамер Н = 3 м получим, R ≈ 6 м и необходимо использовать n = L/R = 1.67 камер. Округляем в большую сторону, и получаем число видеокамер n = 2 с перекрытием участков между камерами и с запасом по краям примерно по 1 м. При небольшой ширине реки может использоваться одна видеокамера.
Для долговременной нормальной эксплуатации устройства должна обеспечиваться защита видеокамер и остальных его элементов от атмосферных и несанкционированных воздействий.
Рассмотрим работу устройства для варианта, когда в нем отсутствует лента, располагаемая на дне реки в зоне контроля видеокамер. Проплывающая рыба в этом случае будет регистрироваться видеокамерами на фоне дна и после обработки видеокадров в блоке обработки 6 по алгоритмам, представленным, например, в работах [24-25], будет выполняться ее подсчет в блоке счета 7.
Как показано в работах [20-23] и в ряде других работ, полученные результаты, однако в значительной степени будут зависеть от параметров солнечного освещения, от погодных условий, а также от прозрачности воды, структуры дна, толщины меняющегося водного слоя. Анализ фотографий рыб разных пород, находящихся в водоемах с различными параметрами дна показал, что во многих случаях визуально рыба практически полностью сливается со структурой дна, и ее выделение на фоне донной поверхности связано со значительными сложностями.
Поэтому предлагается в зоне контроля видеокамер на дне 3 реки расположить ленту 5 пересекающую реку в поперечном направлении. Причем, цветовые характеристики ленты, контрастируют с цветовыми параметрами регистрируемых рыб, а также, контрастируют с цветовыми параметрами дна. Лента может быть сплошной или перфорированной, с наличием цветоконтрастных линий или отдельных областей с различными размерами и цветом. Лента может быть плоской или объемной, с гладкими поверхностями, или имеющая выступающие части различной окраски. В нижней части ленты могут располагаться заглубляющиеся элементы, удерживающие ленту, например, на песчаном или галечном дне. В структуре ленты также могут находиться карманы и полости, куда помещают искусственные или естественные утяжители: валуны, галька и другие. Крепление ленты на дне может выполняться также с помощью дополнительных элементов, не показанных на чертеже. Ширину ленты предпочтительно выбирают в пределах 30-80 см. Лента может быть изготовлена на основе пластмассы, синтетической ткани или может быть составной из набора элементов разного материала.
При прохождении рыбы над лентой она будет четко выделяться на ее фоне, что обеспечит безошибочную регистрацию рыб и подсчет ее количества.
Для обеспечения регистрации рыб при условии недостаточной освещенности, а также ночью в ленте располагают излучающие оптические элементы 5, в качестве которых могут использоваться, например, светодиоды, выполняющие излучение в инфракрасном, видимом или ультрафиолетовом спектральных диапазонах. Свечение элементов 5 может быть непрерывным или импульсным с различными частотами, длительностями импульсов и пауз. Параметры свечения оптических элементов 5 (спектр, интенсивность и другие) выбираются оператором или программно при предварительной настройке устройства после его установки на контролируемый участок реки. Они также могут периодически корректироваться в процессе эксплуатации. Оптические элементы 5 располагают в ленте предпочтительно в виде одной или более продольных полос с расстояниями между элементами в продольном направлении в пределах 10-50 см, так чтобы при проходе рыбы над лентой обеспечивалось последовательное затенение нескольких элементов. Зная расстояния между элементами, а также временные интервалы между их затенениями программно рассчитывают длину и другие параметры проходящей рыбы.
Для питания элементов заявляемого устройства в нем также предусмотрен блок электропитания (на фиг. 1 не показан), который является обязательным блоком для всех электронных устройств. Блок электропитания может быть реализован по различным функциональным схемам, достаточно полно описанным в многочисленной специальной литературе [27]. В качестве первичных источников тока могут использоваться аккумуляторы, солнечные батареи или проточные мини электростанции, располагаемые в реке [28].
Свечение оптических излучающих элементов 5 может выполняться постоянно, или они могут включаться только при недостаточной освещенности. Для этого блок обработки 6 может содержать датчик (фотодиод или другой), вырабатывающий сигнал, зависящий от уровня освещенности. Возможно также включение элементов 5 в ночное время, определяемое встроенными часами блока обработки 6.
Первичную настройку режимов работы устройства выполняют после его установки на контролируемый участок реки. Последовательно подают питающие напряжения на элементы 5, и корректируют параметры этих напряжений (уровень, частоту и длительность вспышек при импульсном питании), добиваясь их четкой регистрации видеокамерами. Затем выполняют проверку работоспособности всей системы, путем перемещения над лентой 4 контрольных макетов рыб при различных уровнях внешней освещенности, с зажженными и погашенными элементами 5 и с другими вариациями условий измерений.
Корректировка режимов работы устройства может выполняться в процессе ее работы программно, или периодически оператором.
Практическая реализация предложенной системы не представляет сложностей. В качестве видеокамер можно использовать стандартные камеры видеонаблюдения, а в качестве блоков обработки и счета - промышленные компьютерные системы [29] и программы обработки изображений, рассмотренные, например, в монографиях [24-25].
Источники информации
1. Патент RU 2291615 «Способ акустического учета рыб в потоке воды», МПК A01К 61/00, заявка 2005112848/12 от 28.04.2005, опубликован 20.01.2007.
2. Патент SU 1242083 «Устройство для подсчета рыб в потоке воды», МПК A01К 61/00, заявка 3841851/28-13 от 11.01.1985, опубликован 07.07.1986.
3. Патент RU 82357 «Гидроакустический высокочастотный многолучевой программно-технический комплекс по учету проходящих на нерест ценных видов рыб «NETCOR-3», МПК G06M 3/00, заявка 2008150916/22 от 22.12.2008, опубликован 20.04.2009.
4. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л. Судостроение, 1986. - 272 с.
5. Патент RU 884642 «Устройство для количественного учета рыб», МПК A01К 61/00, заявка 2899361/28-13 от 24.03.1980, опубликован 30.11.1981.
6. Патент RU 1104556 «Устройство для счета движущихся в воде объектов», МПК A01К 61/00, заявка 3575558 от 31.03.1983, опубликован 23.07.1984.
7. Патент RU 1755751 «Способ учета рыб в потоке воды», МПК A01К 61/00, заявка 4767711 от 12.12.1989, опубликован 23.08.1992.
8. Патент RU 1814412 «Устройство для учета рыбы в потоке воды», МПК A01К 61/00, заявка 4625785/25 от 26.12.1988, опубликован 20.02.1996.
9. Патент DE3811376, «Verfahren und Vorrichtung zum  zur
zur  Aussonderung und Klassifikation von beweglichen
Aussonderung und Klassifikation von beweglichen  », «Способ и устройство для подсчета, измерения размеров, выделения и классификации движущихся объектов», МПК A01K 61/00, A22C25/00, B07B13/00, B07C5/04, B65G 11/00, заявка от 01.04.1987 опубликован 29.12.1988
», «Способ и устройство для подсчета, измерения размеров, выделения и классификации движущихся объектов», МПК A01K 61/00, A22C25/00, B07B13/00, B07C5/04, B65G 11/00, заявка от 01.04.1987 опубликован 29.12.1988
10. Патент US 4743742, «Counting device for fish, especially smolt», «Счетное устройство для рыбы, преимущественно смолта», МПК G06M 11/00, заявка 899,423 от 05.09.1985, опубликован 10.05.1988
11. Патент WO 951903, «A method for countng fish, a device for inplementing ti-oe method and a method for countng fish in an enclosure», «Способ и устройство для подсчета рыбы в садках», МПК A01K 61/00, заявка PCT/N095/00008 от 09.01.1995, опубликован 20.07.95
12. Патент WO 2005025309, «Method and device for recording and determining the weight of fish», «Способ регистрации и оценки веса рыбы и устройство для его осуществления», МПК A01K 61/00, заявка PCT/N02004/000241 от 11.08.2004, опубликован 24.03.2005
13. Патент RU 847959 «Устройство для подсчета молоди рыб в потоке воды», МПК А01К 61/00, заявка 2833040/28-13 от 04.10.1979, опубликован 27.07.1981
14. Патент RU 938864 «Устройство для подсчета молоди рыб в потоке воды», МПК А01К 61/00, заявка 2957016/28-13 от 17.07.1980, опубликован 30.06.1982
15. Патент RU 995716 «Устройство для подсчета молоди рыб в потоке воды», МПК А01К 61/00, G06M 11/02, заявка 2979067 от 02.09.1980, опубликован 15.02.1983
16. Патент CA 2442073, (NO 20011619 от 29.03.2001), «A device for a transparent pipe intended for optical counting and measuring», «Устройство из прозрачной трубы для оптического счета и измерения», МПК G01B 11/04, G01N 15/02, заявка PCT/N002/00119 от 22.03.2002 опубликован 25.09.2003
17. Патент JP 2012212470, «Отдельные счетные устройства», МПК A01K 61/00, G06M 7/00, заявка от 06.05.2007 опубликован 20.07.2012
18. Счетчик рыбы на основе системы технического зрения. URL: http://ie.petrsu.ru/development/r/162/d/2097. (дата обращения 16.05.2019).
19. Семенцов А.Б., Талаев Ф.А., Вакуленко О.А. Видеосчетчик рыбы. // Современная техника и технологии. 2016, № 7 [Электронный ресурс]. URL: http://technology.snauka.ru/2016/07/10309 (дата обращения: 07.02.2019).
20. Дегтев А.И., Шевляков Е.А., Малых К.М., Дубынин В.А. «Опыт оценки численности молоди и производителей тихоокеанских лососей гидроакустическим методом на путях миграции в пресноводных водоемах». Известия ТИНРО, т. 170, с. 113-135, 2012
21. Бугаев В.Ф. Авиаучеты тихоокеанских лососей. URL https://www.proza.ru/2013/11/29/394. Свидетельство о публикации №213112900394, 2013.
22. Бугаев В.Ф. Авиаучет нерки реки Палана. URL https://www.proza.ru/2014/12/12/344. Свидетельство о публикации №214121200344, 2014.
23. Маслов А.В., Бугаев В.Ф. Полет над гнездом нерки // Петропавловск-Камчатский: Изд-во "Камчтпресс". - 72 с., 2011.
24. Визильтер Ю.В., Желтов С.Ю., Бондаренко А.В., Ососков М.В., Моржин А.В. Обработка и анализ изображений в задачах машинного зрения: Курс лекций и практические занятий. - М.: Физматкнига, 2010. - 672 с.
25. Хорн Б.К.П. Зрение роботов: Пер. с англ. - М.: Мир, 1989. - 487 с.
26. Угол обзора объектива камеры видеонаблюдения. URL http://nabludaykin.ru/ugol-obzora-obektiva-kamery-videonablyudeniya/
27. Кучеров Д.П., Куприянов А.А. Современные источники питания ПК и периферии. Полное руководство (+CD) - СПб.: Наука и Техника, 2007. - 352 с.
28. Микро ГЭС в России. URL https://tiu.ru/Mikro-ges.html
29. Промышленная автоматика. URL http://techpribor-kaliningrad.ru/wecon/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКТИВНОГО ОТБОРА ТОВАРНОЙ РЫБЫ | 2017 |
|
RU2667749C1 |
| РЫБОЗАЩИТНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2022 |
|
RU2802233C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА РЫБЫ В САДКАХ ПРЕДПРИЯТИЙ ИНДУСТРИАЛЬНОЙ АКВАКУЛЬТУРЫ | 2018 |
|
RU2697430C1 |
| УСТРОЙСТВО ЗАЩИТЫ ВОДНЫХ БИОРЕСУРСОВ | 2021 |
|
RU2785623C2 |
| СПОСОБ АКУСТИЧЕСКОГО УЧЕТА РЫБ В ПОТОКЕ ВОДЫ | 2005 |
|
RU2291615C1 |
| НЕРЕСТОВЫЙ КОМПЛЕКС ДЛЯ ВОСПРОИЗВОДСТВА РЕОФИЛЬНЫХ ВИДОВ РЫБ | 2006 |
|
RU2308571C1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2014 |
|
RU2558003C1 |
| ОРОСИТЕЛЬНО-РЫБОВОДНЫЙ КОМПЛЕКС НА БАЗЕ КАНАЛА И МАЛОЙ РЕКИ | 2018 |
|
RU2675539C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| СПОСОБ ИСКУССТВЕННОГО ВОСПРОИЗВОДСТВА РЫБЫ | 2011 |
|
RU2490884C2 |

Устройство включает располагаемую над водой видеокамеру, соединенную с последовательно соединенными блоком обработки и блоком счета. В пределах зоны видимости видеокамеры поперек реки на дне расположена лента, цвет которой контрастирует с цветом регистрируемых рыб и дна реки. Лента содержит оптические излучающие элементы, соединенные с блоком обработки. Количество видеокамер выбирают таким, чтобы с их помощью можно было просматривать всю ширину реки. Изобретение обеспечивает непрерывный подсчет рыбы, проходящей в мелководных реках. 2 ил. 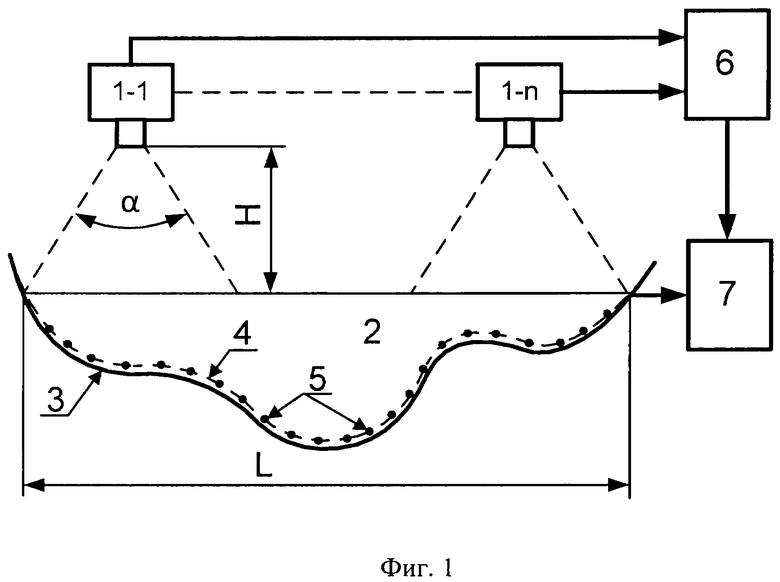
Устройство для подсчета рыбы, содержащее видеокамеру, располагаемую над водой и соединенную с последовательно соединенными блоком обработки и блоком счета, отличающееся тем, что в пределах зоны видимости видеокамеры поперек реки на дне расположена лента, цвет ленты контрастирует с цветом регистрируемых рыб и дна реки, лента содержит оптические излучающие элементы, соединенные с блоком обработки, количество видеокамер n выбирают таким, чтобы с их помощью можно было просматривать всю ширину реки.
| Устройство для подсчета молоди рыб в потоке воды | 1983 |
|
SU1125639A1 |
| CN 110114782 A, 09.08.2019 | |||
| УМЕНЬШЕНИЕ РОСТА ВОЛОС | 2002 |
|
RU2291691C2 |
| CN 104966122 A, 07.10.2015. | |||

