Изобретение относится к научной гидроакустической рыбопоисковой аппаратуре и предназначено для использования на судах рыболовного и научно-исследовательского флота для поиска и подсчета количества рыбы.
Известны рыбопоисковые эхолоты, «Сарган», «Лещ» и другие, характеристики которых приведены в работах [1 с.20-21, 2 с.44-45], содержащие блок управления, выход которого соединен с управляющими входами генераторного тракта, приемного тракта, блока обработки и блока индикации; выход генераторного тракта и вход приемного тракта соединены с акустической антенной, а выход приемного тракта соединен через блок обработки с входом блока индикации.
Блок управления вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт и разрешающие выработку в нем зондирующего радиоимпульса, поступающего на акустическую антенну, излучающую в водную среду акустический зондирующий сигнал. Этот сигнал распространяется в среде лоцирования (воде), отражается от дна и от объектов, находящихся в канале лоцирования. Отраженные эхоимпульсы принимаются той же акустической антенной, и соответствующие им электрические сигналы поступают на вход приемного тракта, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоках «Отсечка», «Временная автоматическая регулировка усиления «ВАРУ», детектирование и др.) [1]. С выхода приемного тракта сигнал поступает на блок обработки, где выделяются эхосигналы от отдельных рыб, а затем на блок индикации, выдающий информацию о наличии и о примерном количестве рыбы. В эхолотах, установленных на судах промысловой разведки, к выходу блока управления и к приемному тракту дополнительно может подключаться интегратор, выдающий оценку величины обнаруженных запасов водных биоресурсов (ВБР) за определенный временной интервал или на определенной величине пути перемещающегося судна [2 с. 15-23, 60-85, 3 с. 136-150]. Имеются эхолоты с встроенным интегратором, например эхолот FQ-50 фирмы «Фуруно» [2 с. 22]. У таких эхолотов блок индикации показывает как наличие рыбы в канале лоцирования, так и ее интегральную величину на определенной дистанции лоцирования. В современных эхолотах с микропроцессорной обработкой эхосигналов интегратора как отдельного блока может и не быть, а интегральную величину количества рыбы определяют программным способом.
Причинами, препятствующими достижению технического результата, являются ограниченные эксплуатационные возможности данных устройств, заключающиеся в следующем.
Эхолоты не позволяют получать достоверные значения плотности обследованных скоплений рыбы [3 с. 142-143]. В частности, при оценке приповерхностных концентраций подвижных рыб, которые сильно распугиваются судном, получаются заниженные значения плотности и численности рыб. Это объясняется тем, что эхолоты просматривают участки водной среды, расположенные в основном под судном. Явление распугивания рыбы в приповерхностных слоях характерно для таких рыб, как лососевые, ставрида, скумбрия, сельдь и другой пелагической рыбы, причем постоянная работа рыболовного флота не вызывает ее адаптацию к шумам судна. Подводные наблюдения с применением разных технических средств показали, что стаи многих видов пелагических рыб на глубинах до 50 м и с дистанций до судна 100-150 м четко реагируют на шум судна и уходят в сторону от судна. По мере приближения судна скорость ухода рыбы растет, что приводит к уменьшению плотности концентрации рыбы в участках водной среды, расположенных вблизи судна. Результаты наблюдения за стаями сельди на глубинах 30-60 м показали, например, что при прохождении судна над рыбой ее концентрация уменьшается в среднем на 70-80% [5]. Особенно это актуально для лососевых разреженных рыб, которые до глубин порядка 20 м имеют максимальную концентрацию, для глубин 20-40 м - среднюю, а на глубинах более 100 м практически отсутствуют [11-13].
Кроме того, использование эхолота позволяет исследовать только узкую полосу водного пространства, расположенную непосредственно под судном, что приводит к необходимости уменьшения расстояний между галсами судна при разведке рыбы. В реальных условиях, при поиске рыбы судно подвергается качке и при своем движении выполняет рысканье в некотором угловом диапазоне. В результате этого прием эхосигналов осуществляется только с части озвученного зондирующим сигналом участка водной среды, что приводит к дополнительным погрешностям определения количества обнаруженных рыб. Кроме того, отдельные объемы водной среды лоцируются по несколько раз и рыба, находящаяся в этих объемах, подсчитывается также несколько раз, что также приводит к дополнительным погрешностям при подсчете рыбы.
Признаки, совпадающие с заявляемым объектом: блок управления, выход которого соединен с управляющими входами генераторного тракта, приемного тракта и блоков обработки и индикации, выход генераторного тракта и вход приемного тракта соединены с акустической антенной, а выход приемного тракта соединен через блок обработки с блоком индикации.
В патенте [5] предложен локатор, акустическая антенна которого выполнена в виде n-го количества эхолокационных датчиков вертикального зондирования, расположенных на поперечных усах, имеющих на концах углубители и компенсирующие подъемные средства, регулирующие величину развода усов отводителей. Концы усов соединены с судном посредством траловых ваеров. Такая конструкция антенны позволяет “расширить зону и повысить эффективности обнаружения рыб и других объектов лова”, однако данное устройство просматривает участок водной акватории только между акустической антенной и дном шириной, определяемой угловым раскрывом одной антенны эхолота (от единиц до нескольких десятков метров), что не решает вопрос о реальном расширении зоны обзора. При этом отдельные объемы водной среды, как и при использовании обычных рыбопоисковых эхолотов, лоцируются по несколько раз и рыба, находящаяся в этих объемах, подсчитывается также несколько раз, что приводит к дополнительным погрешностям при подсчете рыбы.
Кроме того, при использовании такой буксируемой акустической антенны значительно усложняется процесс эксплуатации локационного устройства, что не позволяет проводить одновременное траловое обследование концентрации рыбных скоплений. При последовательной работе отдельных преобразователей акустической системы значительно увеличивается время одного просмотра контролируемого участка водной среды, а при их одновременной работе - увеличивается зона обзора локатора в направлении, перпендикулярном курсу судна, при этом появляются ошибки, связанные с взаимным влиянием акустических трактов соседних преобразователей [1].
В патенте [6] предложено устройство для оценки размеров рыб в процессе их поиска, содержащее блок управления, выход которого соединен с управляющими входами генераторного тракта, приемного тракта, блока обработки и блока индикации, акустическую антенну, соединенную с блоком поворота характеристики направленности антенны, с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком обработки и блоком индикации.
При лоцировании излучение зондирующего сигнала производят в каком-либо одном направлении в пределах сектора, расположенного в плоскости, перпендикулярной направлению движения судна. Эхоимпульсы, отраженные от дна и от объектов, расположенных в канале лоцирования, принимаются той же акустической антенной, и соответствующие им электрические сигналы поступают на вход приемного тракта, где осуществляется их обработка по заданному алгоритму. С выхода приемного тракта сигналы поступают на блок обработки, где выделяются последовательности эхоимпульсов от отдельных рыб, а затем на блок индикации, с которого осуществляется получение информации о наличии и о количестве рыб. После данного цикла лоцирования происходит поворот характеристики направленности антенны на некоторый угол в пределах заданного сектора обзора и начинается новый цикл лоцирования.
Причинами, препятствующими достижению технического результата, являются ограниченные эксплуатационные возможности устройства, заключающиеся в следующем: устройство просматривает участок водной акватории в узком секторе между акустической антенной и дном. Приповерхностные и боковые участки зоны поиска не просматриваются. В контролируемой зоне, располагаемой под судном, получают заниженные значения плотности рыбы за счет ее ухода из участков, прилегающих к курсу судна [3 с. 142-143]. Время лоцирования всего сектора велико и возможны неучтенные пропуски водного пространства. Судно при поиске рыбы подвергается качке и выполняет рысканье в некотором угловом диапазоне, в результате чего прием эхосигналов осуществляется только с части озвученного зондирующим сигналом участка водной среды, что приводит к заниженным значениям количества обнаруженной рыбы. Кроме того, отдельные объемы водной среды лоцируются по несколько раз и рыба, находящаяся в этих объемах, подсчитывается также несколько раз, что приводит к дополнительным погрешностям при подсчете рыбы.
Признаки, совпадающие с заявляемым объектом: блок управления, выход которого соединен с управляющими входами генераторного тракта, приемного тракта, блока обработки и блока индикации, выход генераторного тракта и вход приемного тракта соединены с акустической антенной, а выход приемного тракта через блок обработки соединен с входом блока индикации.
В патенте [14] предложено устройство для поиска и подсчета рыбы, содержащее блок управления, соединенный с управляющими входами генераторного тракта, приемного тракта, блока формирования веера характеристик направленности, блока обработки и блока индикации, акустическую антенну, соединенную с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации; с дополнительными входами блока обработки и блока управления соединен выход блока расчета коэффициента уменьшения зоны обзора «Кузо», вход которого соединен с выходом блока определения положения судна.
Блок управления вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт и разрешающие выработку в нем зондирующего радиоимпульса, поступающего на акустическую антенну, которая может состоять из одной или из нескольких активных поверхностей, излучающую в водную среду акустический зондирующий сигнал. Этот сигнал распространяется в среде лоцирования (воде), отражается от дна и от объектов, находящихся в канале лоцирования. Отраженные эхоимпульсы принимаются элементами акустической антенны, и соответствующие им электрические сигналы поступают на вход приемного тракта, который может быть многоканальным, где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоках «Отсечка», «Временная автоматическая регулировка усиления «ВАРУ», детектирование и др.) [1]. С выхода приемного тракта сигналы поступают на блок формирования веера характеристик направленности, где выполняется формирование N направлений приема эхосигналов, распределенных в секторе излучения. Эхосигналы, соответствующие каждому из N направлений, поступают на вход блока обработки, где выделяются последовательности эхоимпульсов от отдельных рыб, а затем на блок индикации, с которого осуществляется получение информации о наличии и о количестве рыбы.
До прихода судна в некоторую точку пространства в объеме водной среды концентрация рыб подчиняется некоторому закону распределения «F1». При приближении судна рыба реагирует на шум и уходит в сторону от судна. По мере приближения судна скорость ухода рыбы растет, что приводит к уменьшению плотности распределения рыбы на расстояниях от судна порядка нескольких десятков метров и увеличению ее концентрации на границе зоны испуга. На расстояниях, больших дистанции испуга, плотность рыбы не меняется, и общий закон плотности распределения рыбы будет характеризоваться зависимостью «F2». Причем, для разных направлений лоцирования может существовать свой закон распределения «F2-i». Перераспределение рыбы в пространстве не меняет ее общего количества в объеме водной среды, представляющем собой полуцилиндр с осью, совпадающей с курсом судна, и с радиусом, большим расстояния до границы зоны испуга рыбы R1. Поэтому при проведении лоцирования и подсчете количества рыбы до расстояний Rлоц, больших, чем дистанция испуга рыбы R1, ошибка, возникающая за счет ее ухода от судна, в данном устройстве устранена.
В результате того, что судно при поиске рыбы перемещается с некоторой скоростью, подвергается качке и выполняет рысканье в некотором угловом диапазоне, прием эхосигналов осуществляется только с части озвученного зондирующим сигналом участка водной среды, что приводит к заниженным значениям количества обнаруженных рыб. Для устранения этой погрешности в устройстве предусмотрен блок определения положения судна, который определяет значения скорости судна, величину его крена, дифферента, а также угловую скорость рысканья. Эти величины подаются в блок расчета коэффициента уменьшения зоны обзора Кузо, где постоянно рассчитывается поправочный коэффициент уменьшения зоны обзора Кузо, поступающий на дополнительный вход блока обработки, в котором обнаруженное за цикл лоцирования количество рыб корректируется в соответствии со значением этого коэффициента, а также поступающий на вход блока управления и изменяющий параметры лоцирования (период лоцирования, количество и длительность зондирующих сигналов, ширину характеристики направленности антенны и др.) таким образом, чтобы минимизировать ошибку в количестве обнаруженной рыбы.
В данном устройстве, однако, как и в других аналогичных рыбопоисковых системах, отдельные объемы водной среды лоцируются по несколько раз и рыба, находящаяся в этих объемах, подсчитывается также несколько раз, что приводит к появлению дополнительных погрешностей при подсчете рыбы, ограничивающих эксплуатационные возможности устройства.
Признаки, совпадающие с заявляемым объектом: блок управления, соединенный с управляющими входами генераторного тракта, приемного тракта, блока формирования веера характеристик направленности, блока обработки и блока индикации, акустическая антенна, соединенная с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации; с дополнительными входами блока обработки и блока управления соединен выход блока расчета коэффициента уменьшения зоны обзора «Кузо», вход которого соединен с выходом блока определения положения судна.
Задачей изобретения является расширение эксплуатационных возможностей устройства.
Для этого в устройство для поиска и подсчета рыбы, содержащее блок управления, соединенный с управляющими входами генераторного тракта, приемного тракта, блока формирования веера характеристик направленности, блока обработки и блока индикации, акустическую антенну, соединенную с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации; с дополнительными входами блока обработки и блока управления соединен выход блока расчета коэффициента уменьшения зоны обзора «Кузо», вход которого соединен с выходом блока определения положения судна, дополнительно введен блок определения пространственного положения зон повторного лоцирования, входы которого соединены с выходами блока управления и блока определения положения судна, а выход соединен с входом блока обработки.
Изобретение поясняется чертежами. На фиг. 1 показана функциональная схема заявляемого устройства, на фиг. 2 - изображение зоны приема эхосигналов в плоскости, перпендикулярной диаметральной плоскости судна, на фиг. 3 - распределение зон кратности обзора пространства в плоскости, совпадающей с диаметральной плоскостью судна, на фиг. 4 приведены рассчитанные зависимости вероятности попадания рыбы в зону с соответствующей кратностью обзора пространства, на фиг. 5 - траектория движения направляющего вектора характеристики направленности антенны по дну при отсутствии качки, на фиг. 6 - траектория движения направляющего вектора характеристики направленности антенны по дну при боковой качке судна, на фиг. 7 - результаты численного эксперимента для случая наличия всех видов качки при разной скорости движении судна.
Предлагаемое устройство для поиска и подсчета рыбы содержит блок управления 1 (фиг. 1), соединенный с управляющими входами генераторного тракта 2, приемного тракта 3, блока формирования веера характеристик направленности 4, блока обработки 5, блока индикации 6 и блока определения пространственного положения зон повторного лоцирования 7, акустическую антенну 8, соединенную с выходом генераторного тракта 2 и с входом приемного тракта 3, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности 4, блоком обработки 5 и блоком индикации 6; выход блока определения положения судна 9 соединен с блоком расчета коэффициента уменьшения зоны обзора «Кузо» 10, выход которого соединен с дополнительным входом блока обработки 5 и с входом блока управления 1; второй выход блока определения положения судна 9 соединен с входом блока определения пространственного положения зон повторного лоцирования 7, выход которого соединен со вторым дополнительным входом блока обработки 5.
Рассмотрим работу предлагаемого устройства.
Блок управления 1 вырабатывает периодически повторяющиеся синхроимпульсы, поступающие в генераторный тракт 2 и разрешающие выработку в нем зондирующего радиоимпульса, поступающего на акустическую антенну 8, которая может состоять из одной или из нескольких активных поверхностей, излучающую в водную среду акустический зондирующий сигнал. Этот сигнал распространяется в среде лоцирования (воде), отражается от дна и от объектов, находящихся в канале лоцирования. Отраженные эхоимпульсы принимаются элементами акустической антенны 8, и соответствующие им электрические сигналы поступают на вход приемного тракта 3 (который может быть многоканальным), где осуществляется их обработка по заданному алгоритму (усиление, частотная фильтрация, изменение амплитудных соотношений в блоках «Отсечка», «Временная автоматическая регулировка усиления «ВАРУ», детектирование и др.) [1]. С выхода приемного тракта 3 сигналы поступают на блок формирования веера характеристик направленности, где выполняется формирование N направлений приема эхосигналов, распределенных в секторе излучения. Эхосигналы, соответствующие каждому из N направлений, поступают на вход блока обработки 5, где выделяются последовательности эхоимпульсов от отдельных рыб и выполняется подсчет количества обнаруженных рыб, а затем на блок индикации 6, с которого осуществляется получение информации о наличии и о количестве рыбы. Возможна реализация заявляемого устройства и без блока 4. В этом случае прием эхосигналов выполняется по всему сектору, определяемому диаграммой направленности акустической антенны 8. Коммутатор, который обычно присутствует в эхоимпульсных лоцирующих системах [1 с. 181], на функциональной схеме фиг. 1 в виде отдельного блока не выделен, а его элементы являются составными частями генераторного 2 и приемного 3 трактов.
При использовании средств лоцирования за счет движения судна, а также за счет его качки и рысканья, происходит уменьшение объема водной среды, из которого происходит прием эхосигналов, по сравнению с озвученным объемом, в котором распространяется зондирующий сигнал, что приводит к обнаружению рыбы только из части озвученного объема и, соответственно, к заниженным значениям плотности распределения рыбы. На фиг.2 схематично показано уменьшение угла приема эхосигналов на угол А1O1А2 [8] по сравнению с углом излучения. Этот угол в общем случае равен

где Vc - скорость судна; R - диапазон дальности (максимальная дальность действия); с - скорость звука в среде; αизл - ширина характеристики направленности антенны (ХН) при излучении; αпр - ширина ХН при приеме.
Для учета эффекта перекрытия лоцируемых объемов для каждого цикла лоцирования рассчитывают коэффициент уменьшения зоны обзора «Кузо», являющийся отношением объема водной среды, из которого могут быть приняты эхосигналы к объему, в котором распространяется зондирующий сигнал до максимальной дистанции лоцирования Rлоц. Этот расчет выполняют в блоке 10 в соответствии с данными о максимальной дальности лоцирования для данного цикла лоцирования, скорости судна, величинах его крена и рысканья, поступающими с блока определения положения судна 9. Определив коэффициент «Кузо», в блоке обработки 5 корректируют количество обнаруженной рыбы, разделив ее значение на коэффициент «Кузо», а в блоке управления 1 изменяют параметры лоцирования (период лоцирования, количество и длительность зондирующих сигналов, ширину характеристики направленности антенны θ и др.) таким образом, чтобы минимизировать ошибку в количестве обнаруженных рыб. Подробно методика расчета коэффициента Кузо рассмотрена в патенте [14].
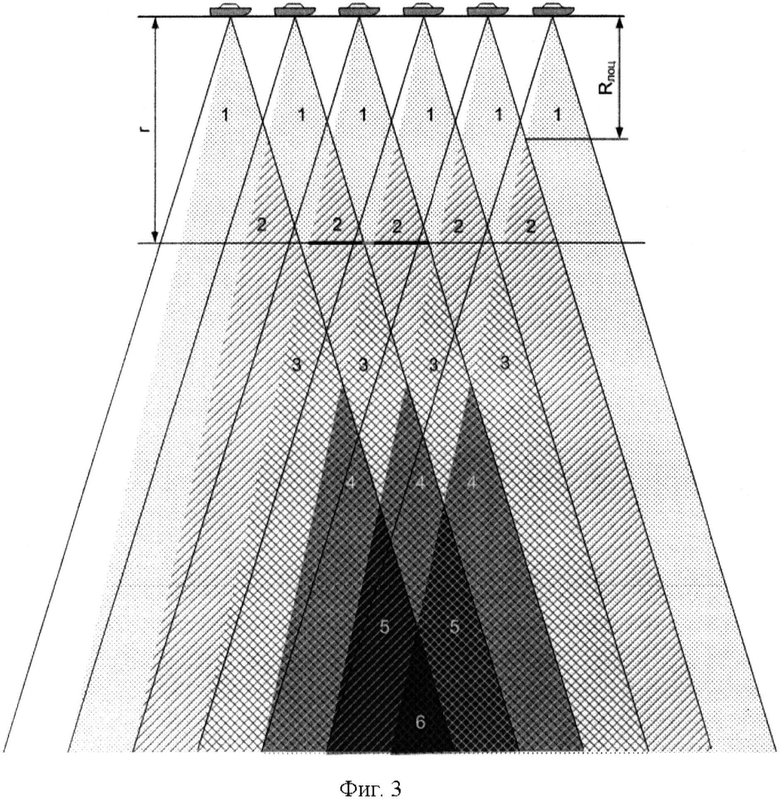
При перемещении судна часть участков среды будет лоцироваться несколько раз, и при наличии в них различных объектов (рыбы и других морепродуктов) эхосигналы от этих объектов будут приняты также несколько раз, что вызовет ошибки при конечном подсчете количества обнаруженной рыбы. На фиг. 3 показан пример распределение зон кратности обзора пространства для рыбопоискового эхолота в плоскости, совпадающей с диаметральной плоскостью судна. Из фиг. видно, что до расстояний равных Rлоц, все обнаруженные объекты будут посчитаны однократно. С увеличением расстояния часть объектов будет подсчитана один раз, а часть объектов - два раза, затем - два и три раза и так далее. Задавая закон распределения рыб по сечениям горизонтов, можно рассчитать в зависимости от параметров лоцирования вероятность повторных учетов объектов для каждых расстояний лоцирования и ввести соответствующие поправочные коэффициенты для определения истинного количества обнаруженных объектов.
На фиг. 4 приведен график вероятностей попадания рыбы в зоны с различными значениями кратности обзора пространства в зависимости от относительного расстояния (глубины) r/Rлоц и при отсутствии качки и рысканья судна.
В общем случае при наличии качки и рысканья судна задача определения кратности обнаружения цели решается при известных законах перемещения судна в декартовой системе пространственных координат х0=f1(t); y0=f2(t); z0=f3(t) и углов между вертикальной осью судна и осями координат x, y, z соответственно А=f4(t); В=f5(t); Г=f6(t). В этом случае область уверенного приема может быть представлена как пересечение двух конусов, уравнение которых можно записать как:

где x0, y0, z0 - координаты вершины конуса (центра антенны); x1, y1, z1 - координаты центра основания конуса (направление поворота оси антенны); x, y, z - координаты точек, образующих поверхность конуса; 


При известных параметрах качки α=f7(t); β=f8(t); γ=f9(t); Z=f10(t) бортовой, килевой, рыскания и вертикальной качек соответственно координаты центров оснований конусов x1, y1, z1 можно определить, используя матрицу поворота - матрицу направляющих косинусов. Для этого определяются:
- матрица поворота вокруг оси Z в плоскости XOY:

- матрица поворота вокруг оси Y в плоскости XOZ:
- матрица поворота вокруг оси X в плоскости ZOY:

Полная матрица поворота равна:

Координаты центра основания конуса x1, y1, z1 определяются с помощью аффинного преобразования

Используя систему уравнений (2)-(7), можно с заранее указанной точностью описать рассматриваемую геометрическую задачу с учетом всех перемещений судна. На фиг. 5 показана траектория движения направляющего вектора характеристики направленности антенны по дну при отсутствии качки, а на фиг. 6 - при боковой качке судна.
В общем случае для определения кратности попадания рассматриваемой точки пространства в области уверенного приема необходимо рассчитать максимальное количество посылок, в которых рассматриваемая точка пространства будет принадлежать области пересечения двух областей озвучивания (областей, соответствующих двум разным циклам излучения-приема), определенных по выражениям (2)-(7).
Для оценки количества обнаруженных целей предлагается использовать число эхоконтактов с областью уверенного приема, в которой была обнаружена цель, как некий нормирующий коэффициент, позволяющий вычислять количество многократно обнаруженных целей. Это число назовем коэффициентом кратности обзора пространства - Ккоп. Тогда количество обнаруженных целей можно будет оценить как
здесь i - индекс (номер) обнаруженного эхосигнала от цели.
Апробирование предлагаемого метода оценки количества обнаруженных рыб проводилось на стенде комплексной отладки (СКО) - имитаторе сигналов для многолучевых гидролокаторов ОКР «Сектор» и «СЧ ОКР Акватория-Веер-ПО ПУИ» при разных значениях (близких к реальным) условий лоцирования.
Алгоритм оценки количества обнаруженных целей реализовывался в виде пошагового выполнения следующих действий:
Шаг 1. В текущем цикле g излучения-приема считается количество рыб, попавших в зону уверенного приема (NFg).
Шаг 2. Для каждой i-й принятой в шаге 1 рыбы вычисляется относительный коэффициент подсчета рыб 
Шаг 3. Общее количество обнаруженных рыб Sum вычисляется прибавлением к нему посчитанного на шаге 2 коэффициента NR: Sumg=Sumg-1+ΣiNRi,g (в начале работы алгоритма счетчик Sum0=0). При выводе текущей величины Sum ее следует округлять в большую сторону (рыб должно быть целое количество).
В результате выполнения данного алгоритма получалась динамически изменяемая во времени величина оценки количества обнаруженных рыб.
Приведенный выше алгоритм был реализован в виде интегрированного модуля СКО и использовался при проведении численных экспериментов, проводимых для разных значений качек, рысканья и скоростей судна. Для полученных результатов относительная погрешность составила ~1÷2%, при вероятности правильного определения количества обнаруженных целей до 90%.
На фиг. 7 приведены результаты численного эксперимента для случая наличия всех видов качки при разной скорости движении судна (скорость изменялась от 1 до 10 узлов). Видно, что относительная погрешность измерений не превышает 2%. Доверительный интервал увеличивается с увеличением скорости, что хорошо согласуется с теоретическими результатами. Увеличение скорости судна равносильно изменению глубины (при увеличении скорости путь D, проходимый судном, увеличивается и тем самым увеличивается глубина области пересечения, см. фиг. 2).
Таким образом, экспериментальная проверка показала принципиальную возможность использования предложенного устройства и разработанных алгоритмов для оценки количества обнаруженных рыб с достаточной точностью.
Реализация предложенного устройства не представляет сложностей. Текущие параметры положения судна определяются многочисленными стандартными датчиками [8, 9], подсоединенными к ЭВМ, рассчитывающей коэффициенты «Кузо» и Ккоп и выполняющей корректировку количества обнаруженной рыбы. Излучение зондирующего сигнала, прием эхосигналов по заданным направлениям, их обработка выполняются устройствами, составные части которых рассмотрены в работах [1, 9-11 и других].
Источники информации
1. Кобяков Ю.С., Кудрявцев Н.Н., Тимошенко В.И. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986. - 272 с.
2. Юданов К.И., Калихман И.Л., Теслер В.Д. Руководство по проведению гидроакустических съемок. - М.: ВНИРО, 1984. - 124 с.
3. Юданов К.И. Гидроакустическая разведка рыбы. - СПб.: Судостроение, 1992. - 192 с.
4. Olsen К. Fish behavior and acoustic sampling. //Intern, symp. on fish, acoust., 1987, Seattle, USA, 28 p.
5. Патент RU 2229226, МПК A01K 79.00, опубл. 27.05.2004. «Устройство для поиска рыбы».
6. Патент RU 2367151, МПК A01K 61.00, опубл. 20.09.2009. «Устройство для оценки размеров рыб в процессе их поиска».
7. Букатый В.М., Дмитриев В.И. Гидроакустические лаги. - М.: Пищевая промышленность, 1980. - 176 с.
8. Проектирование датчиков для измерения механических величин. Под ред. Е.П. Осадчего. - М.: Машиностроение, 1979. - 480 с.
9. Самойлов Л.К. Электронное управление характеристик направленности антенн. - Л.: Судостроение, 1987. - 280 с.
10. Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. - Л.: Судостроение, 1984. - 300 с.
11. Шунтов В.П. О некоторых нерешенных научных и прикладных вопросах изучения тихоокеанских лососей в ближайшие годы. Владивосток, 2006, ТИНРО-центр. Бюллетень №1 реализации «Концепции дальневосточной бассейновой программы изучения тихоокеанских лососей», с. 3-11.
12. Кузнецов М.Ю. Опыт использования научного эхолота ЕК-500 для исследования распределения и количественных оценок тихоокеанских лососей в Беринговом море в летне-осенний период. Владивосток. 2004. Изв. ТИНРО, т. 139, с. 404-417.
13. Николаев А.В., Кузнецов М.Ю., Сыроваткин Е.В. Гидроакустические исследования тихоокеанских лососей в северной части Тихого океана. Владивосток. 2007. Изв. ТИНРО, т. 150, с. 27-47.
14. Патент RU 2421755, МПК G01S 15/96, опубл. 20.06.2011. «Способ и устройство для поиска и подсчета рыбы».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА РЫБЫ В САДКАХ ПРЕДПРИЯТИЙ ИНДУСТРИАЛЬНОЙ АКВАКУЛЬТУРЫ | 2018 |
|
RU2697430C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ РАЗМЕРОВ РЫБ В ПРОЦЕССЕ ИХ ПОИСКА | 2008 |
|
RU2367151C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЗВЕШЕННЫХ В ВОДЕ ЧАСТИЦ | 2012 |
|
RU2524560C1 |
| ПАРАМЕТРИЧЕСКИЙ ПРОФИЛОГРАФ | 2013 |
|
RU2541733C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ КАЛИБРОВКИ (ГРАДУИРОВКИ) ГИДРОАКУСТИЧЕСКОЙ ИЗМЕРИТЕЛЬНОЙ АППАРАТУРЫ ПРИ ОЦЕНКЕ РЫБНЫХ ЗАПАСОВ С ПОМОЩЬЮ ТЕЛЕВИЗИОННОЙ АППАРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260817C2 |
| УСТРОЙСТВО ДЛЯ ПОДСЧЕТА РЫБЫ | 2019 |
|
RU2716418C1 |
| ГИДРОАКУСТИЧЕСКИЙ ПРИЕМОИЗЛУЧАЮЩИЙ ТРАКТ | 2010 |
|
RU2453861C1 |

Изобретение относится к области гидроакустических измерений и предназначено, в частности, для поиска скоплений рыб. Устройство содержит блок управления, соединенный с управляющими входами генераторного тракта, приемного тракта, блока формирования веера характеристик направленности, блока обработки, блока индикации и блока определения пространственного положения зон повторного лоцирования. Также устройство содержит акустическую антенну, соединенную с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации. При этом выход блока определения положения судна соединен с блоком расчета коэффициента уменьшения зоны обзора, выход которого соединен с дополнительным входом блока обработки и с входом блока управления; второй выход блока определения положения судна соединен с входом блока определения пространственного положения зон повторного лоцирования, выход которого соединен со вторым дополнительным входом блока обработки. Технический результат - повышение точности измерений. 7 ил.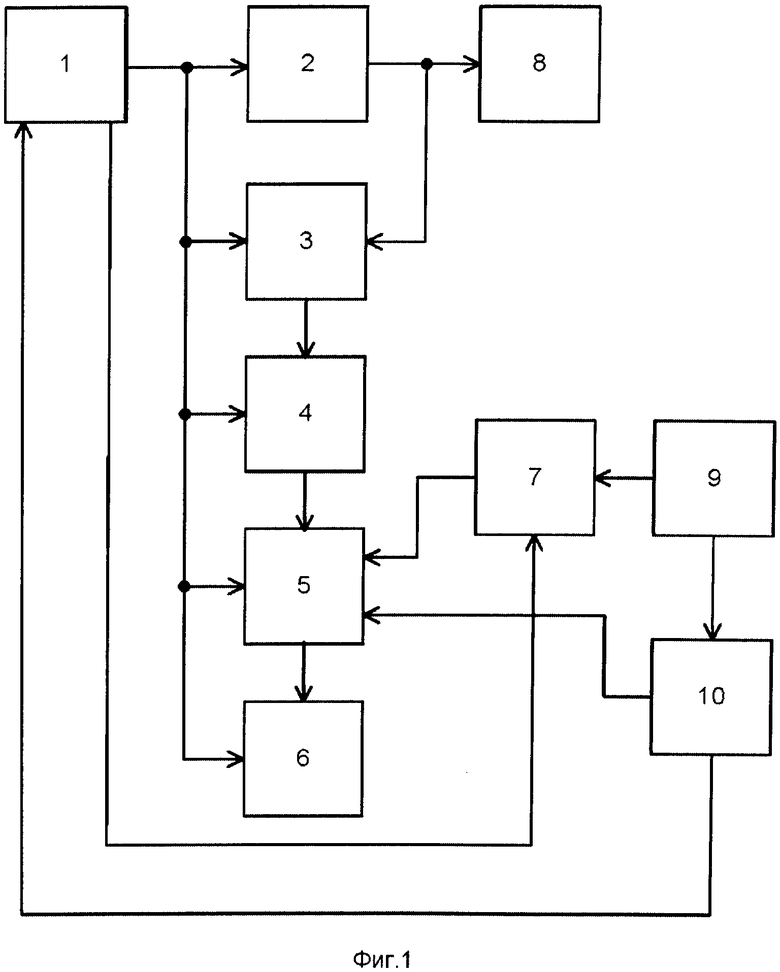
Устройство для поиска и подсчета рыбы, содержащее блок управления, соединенный с управляющими входами генераторного тракта, приемного тракта, блока формирования веера характеристик направленности, блока обработки и блока индикации, акустическую антенну, соединенную с выходом генераторного тракта и с входом приемного тракта, выход которого соединен с последовательно соединенными блоком формирования веера характеристик направленности, блоком обработки и блоком индикации; с дополнительными входами блока обработки и блока управления соединен выход блока расчета коэффициента уменьшения зоны обзора, вход которого соединен с выходом блока определения положения судна, отличающееся тем, что в него дополнительно введен блок определения пространственного положения зон повторного лоцирования, входы которого соединены с выходами блока управления и блока определения положения судна, а выход соединен с входом блока обработки.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА И ПОДСЧЁТА РЫБЫ | 2010 |
|
RU2421755C1 |
| ДОЛГОВ А | |||
| Н | |||
| РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ АЛГОРИТМОВ ВТОРИЧНОЙ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ МНОГОЛУЧЕВОГО ГИДРОЛОКАТОРА СЕКТОРНОГО ОБЗОРА ДЛЯ ПОДСЧЕТА ОДИНОЧНЫХ РЫБ И ОЦЕНКИ ПАРАМЕТРОВ КОСЯКОВ РЫБ // ИЗВЕСТИЯ ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА | |||
| ТЕХНИЧЕСКИЕ НАУКИ, N 9, 2013 | |||
| JP 2009180575 A, 13.08.2009; | |||
| US 6980484 B2, 27.12.2005; | |||
| WO 2001042992 A1, 14.06.2001 | |||

