Изобретение относится к измерительной технике, в частности к сейсмометрии, и может быть использовано для сейсмического мониторинга.
Известен трехкомпонентный скважинный цифровой сейсмометр [1], содержащий блок сбора данных с основным источником питания, блок электроники, состоящий из аналого-цифрового преобразователя, соединенного с микропроцессором, трехкомпонентный акселерометрический датчик, соединенный с аналого-цифровым преобразователем, наклономер, трехкоординатный магнитометр и установленный в блоке электроники вторичный источник питания, при этом наклономер и трехкоординатный магнитометр соединены с микропроцессором, причем трехкомпонентный акселерометрический датчик, наклономер, трехкоординатный магнитометр и блок электроники соединены с вторичным источником питания и установлены в водонепроницаемом корпусе, выполненном из нержавеющей стали.
Этот сейсмометр не обеспечивает защиты от сейсмических помех и не обеспечивает изменения азимутальной ориентации в скважине.
Наиболее близким техническим решением к предлагаемому является трехкомпонентный скважинный сейсмометр KS-2000BH [2], [3], фирмы Geotech Instruments LLC. Сейсмометр содержит в герметичном корпусе блок арретирования, генератор, первый, второй и третий каналы приема сигналов, причем каждый канал включает маятник, интегратор, усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, усилитель-демодулятор, блок обратной связи и магнитоэлектрический преобразователь, и в каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом ко входу магнитоэлектрического преобразователя, усилитель и интегратор подключены к выходу усилителя-демодулятора а емкостный датчик перемещения и усилитель-демодулятор подключены к генератору.
Недостатком прототипа является отсутствие возможности изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Техническим результатом, обеспечиваемым заявляемым изобретением, является возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Технический результат достигается тем, что трехкомпонентный скважинный сейсмометр, содержащий в герметичном корпусе с подпружиненными стабилизаторами блок арретирования, генератор, первый и второй каналы приема горизонтальных составляющих сигналов и третий канал приема вертикальной составляющей сигналов, причем каждый канал включает маятник, первый усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, второй усилитель, первый демодулятор, блок обратной связи и магнитоэлектрический преобразователь, в каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом ко входу магнитоэлектрического преобразователя, первый усилитель подключен к выходу первого демодулятора, а второй вход первого демодулятора и емкостный датчик перемещения подключены к генератору, дополнительно содержит микропроцессор, цифро-аналоговый преобразователь (ЦАП), первый, второй и третий аналого-цифровые преобразователи (АЦП), датчик азимутального перемещения, гониометр, выполненный с размещенными на роторе, связанном с приводом ротора и энкодером, первой и второй взаимно перпендикулярными полевыми обмотками и с размещенными вокруг ротора неподвижными n парами взаимно перпендикулярных искательных обмоток, последовательно соединенные первый коммутатор, второй демодулятор, первый режекторный фильтр и четвертый АЦП, последовательно соединенные второй коммутатор, третий демодулятор, второй режекторный фильтр и пятый АЦП, причем первый и второй коммутаторы подключены к n парам искательных обмоток, второй и третий демодуляторы вторыми входами подключены к генератору, первая и вторая полевые обмотки подключены к выходам вторых усилителей, соответственно, первого и второго каналов приема сигналов, выходы первых усилителей первого, второго и третьего каналов приема сигналов подключены, соответственно, к первому, второму и третьему АЦП, все калибраторы подключены входами к ЦАП, привод ротора, энкодер, датчик азимутального перемещения, управляющие входы первого и второго коммутаторов, вход ЦАП и выходы всех АЦП подключены к микропроцессору, привод ротора выполнен цифровым, ЦАП выполнен трехканальным, а блок арретирования выполнен трехканальным и подключен к микропроцессору.
Такое выполнение трехкомпонентного скважинного сейсмометра обеспечивает возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
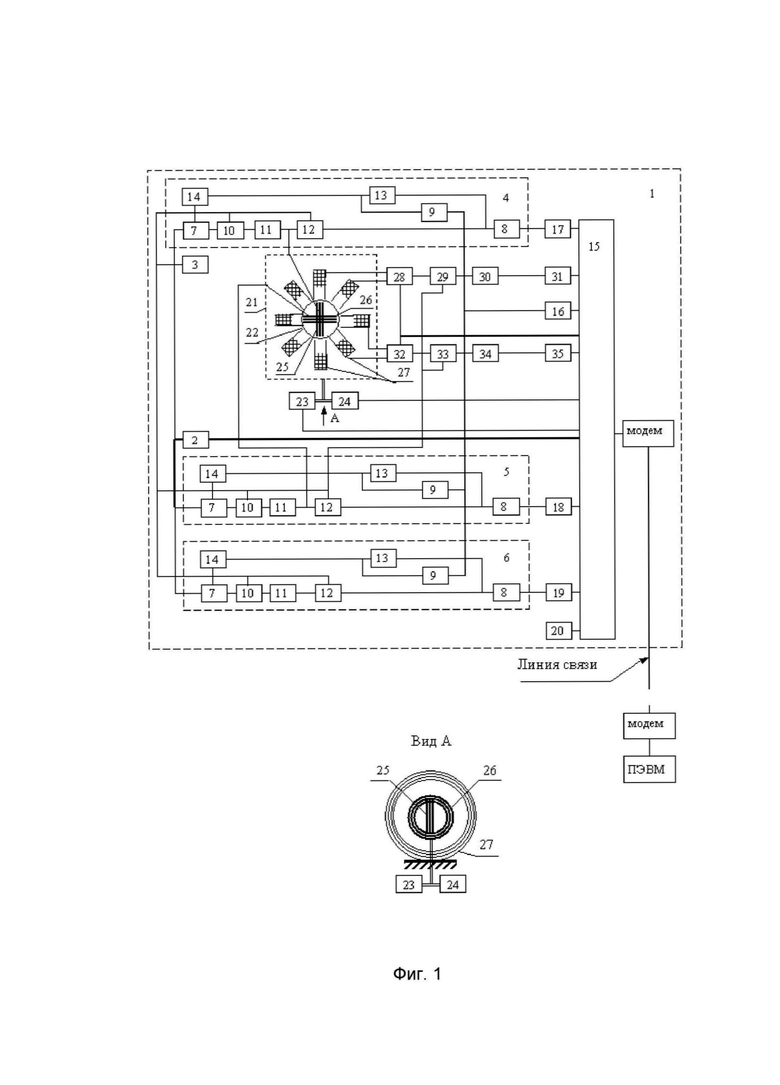
На фиг.1 представлена структурная схема трехкомпонентного скважинного сейсмометра.
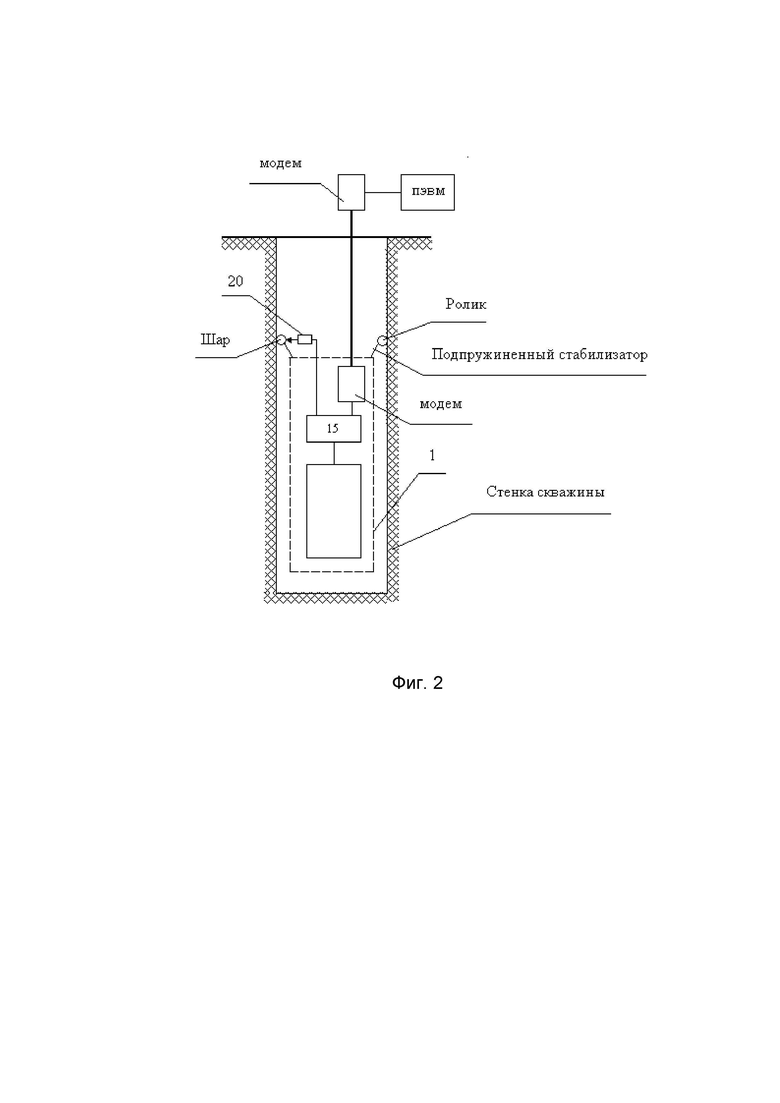
На фиг.2 представлена схема одного из возможных вариантов установки трехкомпонентного скважинного сейсмометра в скважине.
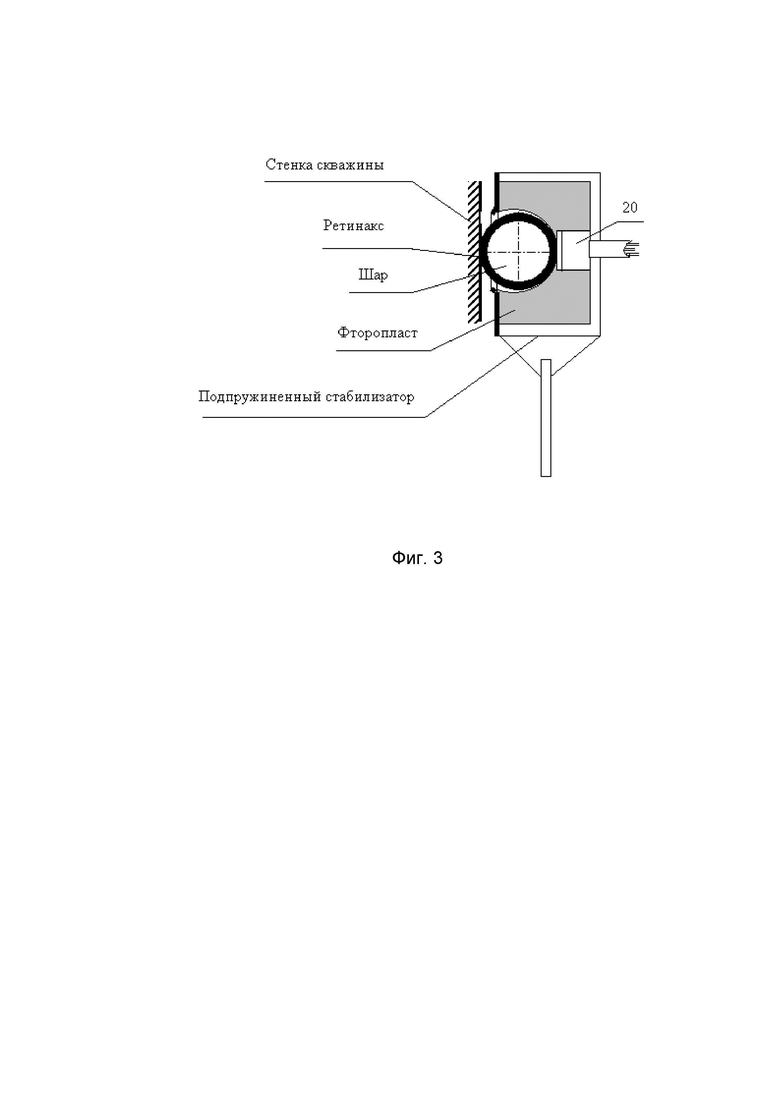
На фиг.3 представлена схема одного из возможных вариантов установки датчика азимутального перемещения на стандартном подпружиненном стабилизаторе путем замены ролика одного из стабилизаторов на шар.
Принятые обозначения:
1 – герметичный корпус, 2 – блок арретирования, 3 – генератор, 4 – первый канал приема сигналов, 5 – второй канал приема сигналов, 6 – третий канал приема сигналов, 7 – маятник, 8 – первый усилитель, 9 – калибратор, 10 – емкостный датчик перемещения, 11 – второй усилитель, 12 – первый демодулятор, 13 – блок обратной связи, 14 – магнитоэлектрический преобразователь, 15 – микропроцессор, 16 – цифро-аналоговый преобразователь (ЦАП), 17 – первый аналого-цифровой преобразователь (АЦП), 18 – второй АЦП, 19 – третий АЦП, 20 – датчик азимутального перемещения, 21 – гониометр, 22 – ротор гониометра, 23 – привод ротора, 24 – энкодер, 25 – первая полевая обмотка, 26 – вторая полевая обмотка, 27 – n пар искательных обмоток, 28 – первый коммутатор, 29 – второй демодулятор, 30 – первый режекторный фильтр, 31 – четвертый АЦП, 32 – второй коммутатор, 33 – третий демодулятор, 34 – второй режекторный фильтр, 35 – пятый АЦП.
Трехкомпонентный скважинный сейсмометр содержит в герметичном корпусе 1 с подпружиненными стабилизаторами блок 2 арретирования, генератор 3, первый и второй каналы 4, 5 приема горизонтальных составляющих сигналов и третий канал 6 приема вертикальной составляющей сигналов, причем каждый канал включает маятник 7, первый усилитель 8, калибратор 9, последовательно соединенные емкостный датчик 10 перемещения, второй усилитель 11, первый демодулятор 12, блок 13 обратной связи и магнитоэлектрический преобразователь 14, в каждом канале маятник 7 механически связан с емкостным датчиком 10 перемещения, с магнитоэлектрическим преобразователем 14 и блоком 2 арретирования, калибратор 9 подключен выходом ко входу магнитоэлектрического преобразователя 14, первый усилитель 8 подключен к выходу первого демодулятора 12, а второй вход первого демодулятора 12 и емкостный датчик 10 перемещения подключены к генератору 3, дополнительно содержит микропроцессор 15, цифро-аналоговый преобразователь (ЦАП) 16, первый, второй и третий аналого-цифровые преобразователи (АЦП) 17, 18, 19, датчик 20 азимутального перемещения, гониометр 21, выполненный с размещенными на роторе 22, связанном с приводом 23 ротора и энкодером 24, взаимно перпендикулярными первой и второй полевыми обмотками 25, 26 и с размещенными вокруг ротора неподвижными n парами взаимно перпендикулярных искательных обмоток 27, последовательно соединенные первый коммутатор 28, второй демодулятор 29, первый режекторный фильтр 30 и четвертый АЦП 31, последовательно соединенные второй коммутатор 32, третий демодулятор 33, второй режекторный фильтр 34 и пятый АЦП 35, причем первый и второй коммутаторы 28, 32 подключены к n парам искательных обмоток 27, второй и третий демодуляторы 29, 33 вторыми входами подключены к генератору 3, первая и вторая полевые обмотки 25, 26 подключены к выходам вторых усилителей 11, соответственно, первого и второго каналов 4, 5 приема сигналов, выходы первых усилителей 8 первого, второго и третьего каналов 4, 5, 6 приема сигналов подключены, соответственно, к первому, второму и третьему АЦП 17, 18, 19, все калибраторы подключены входами к ЦАП 16, привод 23 ротора, энкодер 24, датчик 20 азимутального перемещения, управляющие входы первого и второго коммутаторов 28, 32, вход ЦАП и выходы всех АЦП подключены к микропроцессору 15, привод 23 ротора выполнен цифровым, ЦАП 16 выполнен трехканальным, а блок арретирования 2 выполнен трехканальным и подключен к микропроцессору 15.
Трехкомпонентный скважинный сейсмометр работает следующим образом.
При появлении сейсмических воздействий происходит перемещение относительно герметичного корпуса 1 маятника 7 в первом канале 4 приема сигналов, что вызывает на выходе емкостного датчика 10 перемещения появление сигнала, который поступает на вход второго усилителя 11, усиливается, поступает на вход первого демодулятора 12, и выпрямляется с помощью опорных сигналов генератора 3, поступающих на емкостный датчик 10 перемещения и дополнительный вход первого демодулятора 12. Выходной сигнал первого демодулятора 12 усиливается первым усилителем 8 и поступает через первый АЦП 17 в микропроцессор 15 для передачи информации с помощью модемов через линию связи и дальнейшей обработки в ПЭВМ. Кроме того, выходной сигнал первого демодулятора 12 поступает через блок 13 обратной связи на магнитоэлектрический преобразователь 14, механически связанный с маятником 7 и реализующий отрицательную обратную связь в трехкомпонентном скважинном сейсмометре.
Аналогично при появлении сейсмических воздействий второй и третий каналы 5, 6 приема горизонтальной и вертикальной составляющих сигналов преобразуют и посылают сейсмические сигналы через второй и третий АЦП 18, 19 в микропроцессор 15 для передачи с помощью модема через линию связи и дальнейшей обработки в ПЭВМ. Контроль работоспособности трехкомпонентного скважинного сейсмометра осуществляется подачей из микропроцессора 15 калибровочных сигналов через ЦАП 16 и калибраторы 9 на входы магнитоэлектрических преобразователей 14. Для предотвращения механических повреждений опор маятников 7 при транспортировке и установке трехкомпонентного скважинного сейсмометра в скважину, маятники 7 фиксируются подачей соответствующих сигналов из микропроцессора 15 на блок 2 арретирования ( включающий, например, для каждого канала механизм арретирования, общие электродвигатель и ключ, связанный с микропроцессором). Перед установкой сейсмометр опускают в скважину в районе оголовка и поворачивают на заданный угол, считывая начальное и конечное показания датчика 20 азимутального перемещения для масштабирования смещений, выдаваемых датчиком на конкретной скважине. При установке в скважину трехкомпонентный скважинный сейсмометр ориентируют по азимуту на оголовке скважины, опускают на заданную глубину и фиксируют. При этом датчик 20 азимутального перемещения (например, аналог компьютерной мыши [ 4 ] ), установленный на подпружиненном стабилизаторе, формирует и передает через микропроцессор 15 в ПЭВМ информацию о величине и направлении смещения трехкомпонентного скважинного сейсмометра относительно первоначальной азимутальной ориентации. По полученным сигналам в ПЭВМ вычисляется угол, на который необходимо повернуть трехкомпонентный скважинный сейсмометр, чтобы восстановить ориентацию. В предложенном техническом решении трехкомпонентный скважинный сейсмометр остается неподвижным, реализуется поворот диаграмм направленности трехкомпонентного скважинного сейсмометра на любой заданный угол, что дает возможность получения требуемой ориентации или поиска положения с минимумом помех. Для этого сигналы с выходов вторых усилителей 11 первого канала 4 приема сигналов и второго канала 5 приема сигналов поступают в первую полевую обмотку 25 и во вторую полевую обмотку 26, где создают магнитное поле, подобное сейсмическому полю, принятому первым и вторым каналами 4, 5 приема сигналов. Третий канал 6 приема сигналов является вертикальным и в изменении ориентации не участвует. На n парах искательных обмоток 27, находящихся в этом магнитном поле, наводится ЭДС, зависящая от ориентации конкретной искательной обмотки относительно первой и второй полевых обмоток 25, 26. Поворот n-ой искательной обмотки 27 относительно первой и второй полевых обмоток 25, 26 приводит к повороту результирующей диаграммы направленности для пеленгации в пространстве. При размещении n пар искательных обмоток 27, повернутых относительно друг друга, эффект механического поворота достигается последовательным переключением n пар искательных обмоток 27 с помощью первого и второго коммутаторов 28, 32. Для этого на управляющие входы первого и второго коммутаторов 28, 32 из микропроцессора 15 подаются коды пары, содержащие номер искательной обмотки 27, подключенной к первому коммутатору 28 и номер перпендикулярной искательной обмотки 27, подключенной ко второму коммутатору 32. С выходов первого и второго коммутаторов 28, 32 сигналы поступают на второй и третий демодуляторы 29, 33, подключенные к генератору 3 несущей частоты, и далее, через первый и второй режекторные фильтры 30, 34, настроенные на несущую частоту генератора 3, поступают на входы четвертого и пятого АЦП 31, 35, подключенных выходами к микропроцессору 15. При последовательном изменении номеров подключаемых неподвижных n пар искательных обмоток 27 обеспечивается быстрый поворот результирующей диаграммы направленности, например, до достижения минимума сигнала помехи для относительно грубой пеленгации, точность которой зависит от числа n пар искательных обмоток 27 и угла смещения между ними. Для этого нет необходимости использовать привод ротора и энкодер, все обмотки гониометра остаются неподвижными. Если требуется более высокая точность и источник помехи не является кратковременным, то более точная подстройка осуществляется качанием на упругих опорах (без сухого трения) в небольших пределах (в пределах угла смещения искательных обмоток 27 относительно друг друга) ротора 22 вместе с первой и второй полевыми обмотками 25, 26 с помощью привода 23 ротора по сигналам из ПЭВМ, поступающим из микропроцессора 15. Направление на помеху определяется по номерам неподвижных искательных обмоток 27, подключенных к первому и второму коммутаторам 28, 32, плюс угол поворота ротора 22 гониометра 21, измеряемый с помощью энкодера 24, и полученный в зависимости от направления и числа шагов, поданных из ПЭВМ на привод 23 ротора, который может быть использован для точной подстройки минимума помехи. При этом на точность гониометра 21 существенно влияет ширина полевых и искательных обмоток, ухудшая точность на нижних частотах, где для обмоток требуется много витков. Для повышения точности на нижних частотах реализуется работа гониометра 21 не на частотах принимаемых сигналов, а на более высокой несущей частоте, где требуемая точность достижима, а также используются первый и второй режекторные фильтры 30, 34, защищающие выходные цепи от проникновения помехи на несущей частоте.
Таким образом, достигается заявленный результат и предлагаемый трехкомпонентный скважинный сейсмометр обеспечивает возможность изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину.
Источники информации.
1. Скважинный трехкомпонентный цифровой акселерометр (патент РФ № 2488849 С1, МПК7: G01V1/16, 2012 г., опубл. 27.07.2013 г.)
2. Broadband Seismometer – Models KS-2000 and KS-2000M, Operation Manual, руководство по эксплуатации, GEOTECH INSTRUMENTS, LLC, Copyright © 2000-2002, http://www.geoinstr.com/pub/manuals/ks-2000m.pdf
3. Broadband Seismometer, Model KS-2000M, Rev. 2, Model KS-2000BH, Datasheets, Справочные данные, GEOTECH INSTRUMENTS, LLC, OCTOBER 2012, http://www.geoinstr.com/ds-ks2000m.pdf
4. Anatoly Besplemennov, Измерение угловых или линейных перемещений с помощью оптического датчика мыши, журнал РАДИОЛОЦМАН, май 2015,
https://www.rlocman.ru/book/book.html?di=160368.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехкомпонентный скважинный сейсмометр | 2019 |
|
RU2719625C1 |
| Трехкомпонентный скважинный сейсмометр | 2020 |
|
RU2738734C1 |
| Сейсмометр | 2019 |
|
RU2717168C1 |
| Сейсмометр | 2020 |
|
RU2738732C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2545523C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2544879C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2545186C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2541358C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2547236C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК СИГНАЛА | 2013 |
|
RU2559746C2 |
Изобретение относится к измерительной технике, в частности к сейсмометрии, и может быть использовано для сейсмического мониторинга. Заявлен трехкомпонентный скважинный сейсмометр, содержащий в герметичном корпусе с подпружиненными стабилизаторами блок арретирования, генератор, первый и второй каналы приема горизонтальных составляющих сигналов и третий канал приема вертикальной составляющей сигналов. Причем каждый канал включает маятник, первый усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, второй усилитель, первый демодулятор, блок обратной связи и магнитоэлектрический преобразователь. В каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования. Калибратор подключен выходом к входу магнитоэлектрического преобразователя, первый усилитель подключен к выходу первого демодулятора, а второй вход первого демодулятора и емкостный датчик перемещения подключены к генератору. Дополнительно содержится микропроцессор, цифроаналоговый преобразователь (ЦАП), первый, второй и третий аналого-цифровые преобразователи (АЦП), датчик азимутального перемещения, гониометр, выполненный с размещенными на роторе, связанном с приводом ротора и энкодером, первой и второй взаимно перпендикулярными полевыми обмотками и с размещенными вокруг ротора неподвижными n парами взаимно перпендикулярных искательных обмоток, последовательно соединенные первый коммутатор, второй демодулятор, первый режекторный фильтр и четвертый АЦП, последовательно соединенные второй коммутатор, третий демодулятор, второй режекторный фильтр и пятый АЦП. Вход ЦАП и выходы всех АЦП подключены к микропроцессору, привод ротора выполнен цифровым, ЦАП выполнен трехканальным, а блок арретирования выполнен трехканальным и подключен к микропроцессору. Технический результат - обеспечение возможности изменения азимутальной ориентации диаграмм направленности трехкомпонентного скважинного сейсмометра после установки в скважину. 3 ил.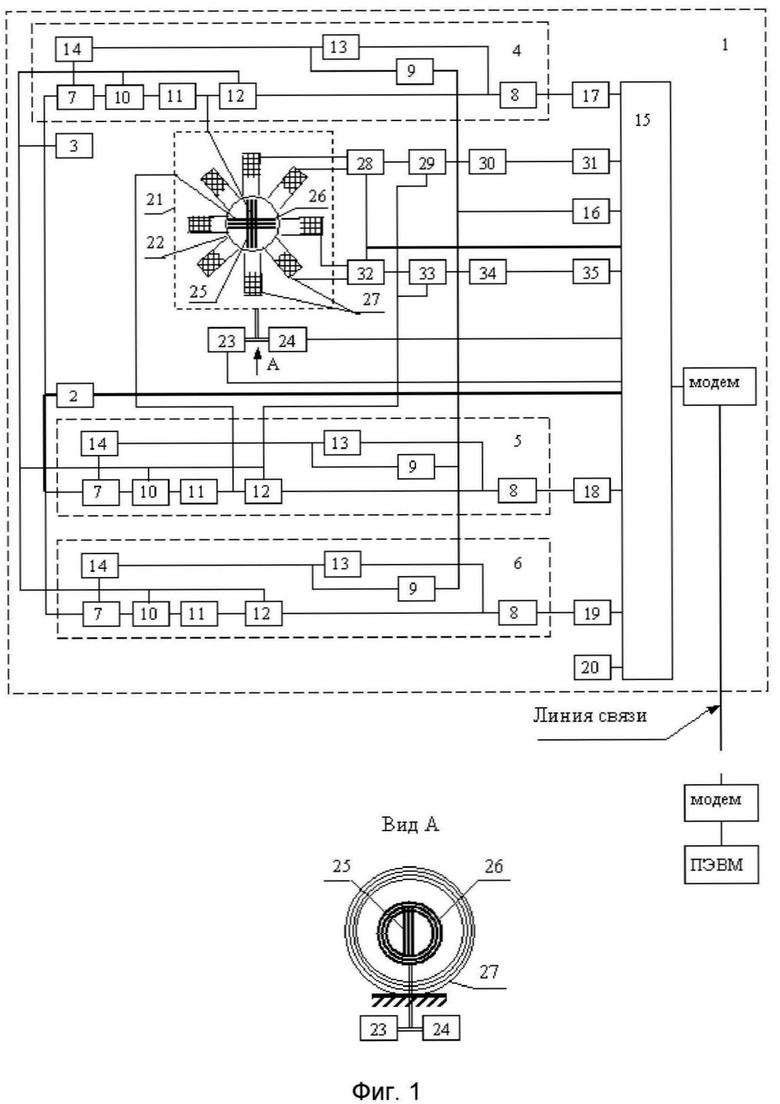
Трехкомпонентный скважинный сейсмометр, содержащий в герметичном корпусе с подпружиненными стабилизаторами блок арретирования, генератор, первый и второй каналы приема горизонтальных составляющих сигналов и третий канал приема вертикальной составляющей сигналов, причем каждый канал включает маятник, первый усилитель, калибратор, последовательно соединенные емкостный датчик перемещения, второй усилитель, первый демодулятор, блок обратной связи и магнитоэлектрический преобразователь, в каждом канале маятник механически связан с емкостным датчиком перемещения, с магнитоэлектрическим преобразователем и блоком арретирования, калибратор подключен выходом к входу магнитоэлектрического преобразователя, первый усилитель подключен к выходу первого демодулятора, а второй вход первого демодулятора и емкостный датчик перемещения подключены к генератору, отличающийся тем, что дополнительно содержит микропроцессор, цифроаналоговый преобразователь (ЦАП), первый, второй и третий аналого-цифровые преобразователи (АЦП), датчик азимутального перемещения, гониометр, выполненный с размещенными на роторе, связанном с приводом ротора и энкодером, первой и второй взаимно перпендикулярными полевыми обмотками и с размещенными вокруг ротора неподвижными n парами взаимно перпендикулярных искательных обмоток, последовательно соединенные первый коммутатор, второй демодулятор, первый режекторный фильтр и четвертый АЦП, последовательно соединенные второй коммутатор, третий демодулятор, второй режекторный фильтр и пятый АЦП, причем первый и второй коммутаторы подключены к n парам искательных обмоток, второй и третий демодуляторы вторыми входами подключены к генератору, первая и вторая полевые обмотки подключены к выходам вторых усилителей, соответственно, первого и второго каналов приема сигналов, выходы первых усилителей первого, второго и третьего каналов приема сигналов подключены, соответственно, к первому, второму и третьему АЦП, все калибраторы подключены входами к ЦАП, привод ротора, энкодер, датчик азимутального перемещения, управляющие входы первого и второго коммутаторов, вход ЦАП и выходы всех АЦП подключены к микропроцессору, привод ротора выполнен цифровым, ЦАП выполнен трехканальным, а блок арретирования выполнен трехканальным и подключен к микропроцессору.
| "Broadband Seismometer", Model KS-2000M, Rev | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| СКВАЖИННЫЙ ТРЕХКОМПОНЕНТНЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2488849C1 |
| Профилешлифовальный прецизионный станок | 1960 |
|
SU145461A1 |
| СЕЙСМОГРАФ | 2003 |
|
RU2236025C1 |
| US 20170205519 A1 20.07.2017 | |||
| US 7986589 B2 26.07.2011. | |||

