Изобретение касается модульной системы штекерного соединителя по роду независимого п.1 формулы изобретения.
Кроме того, изобретение касается способа измерения по роду независимого п.13 формулы изобретения.
Такие модульные системы штекерного соединителя нужны для того, чтобы можно было гибко адаптировать штекерный соединитель, в частности тяжелый прямоугольный штекерный соединитель, к определенным требованиям в отношении передачи сигнала и энергии, напр., между двумя электрическими приборами.
Уровень техники
В уровне техники модульные системы штекерного соединителя с применением модульной рамы, известной также как удерживающая рама или рама модуля, раскрыты в многочисленных печатных изданиях и публикациях, показаны на выставках и применяются, в частности, в промышленной сфере в виде штекерных соединителей для больших нагрузок. Например, они описываются в печатных изданиях DE 10 2013 106 279 A1, DE 10 2012 110 907 A1, DE 10 2012 107 270 A1, DE 20 2013 103 611 U1, EP 2 510 590 A1, EP 2 510 589 A1, DE 20 2011 050 643 U1, EP 860 906 A2, DE 29 601 998 U1, EP 1 353 412 A2, DE 10 2015 104 562 A1, EP 3 067 993 A1, EP 1 026 788 A1, EP 2 979 326 A1, EP 2 917 974 A1. При этом, как правило, несколько одинаковых или разных модулей штекерного соединителя вместе удерживаются в одной модульной раме и встраиваются в корпус штекерного соединителя. То есть функционирование полученного при этом штекерного соединителя является очень гибким. В модульной системе штекерного соединителя могут, например, находить применение пневматические модули, оптические модули, модули для передачи электрической энергии и/или электрических аналоговых и/или цифровых сигналов. Все чаще модули штекерного соединителя выполняют также задачи технические измерительной и информационной техники.
Печатное издание WO 2015/149757 A2 раскрывает модульную систему штекерного соединителя, имеющую по меньшей мере один модуль штекерного соединителя, который имеет по меньшей мере один датчик, напр., датчик тока. Эта модульная система штекерного соединителя включает в себя электронику для аналитической обработки, имеющую управляющую электронику для шинной системы. Эта электроника для аналитической обработки может быть расположена в главном модуле модульной системы штекерного соединителя и через шинную систему электропроводящим образом соединена с указанным по меньшей мере одним датчиком. Модули штекерного соединителя могут иметь дополнительные средства контакта в виде штекерных («папа») и гнездовых («мама») контактов, с помощью которых они контактируют между собой. Благодаря этому возможно расположение множества модулей штекерного соединителя в ряд друг за другом. Так, линия шины данных может вестись через сколь угодно модулей штекерного соединителя, напр., в виде соединения от точки к точке, до главного модуля, при этом модули штекерного соединителя с электронной точки зрения соединены друг с другом последовательно. При этом геометрическое положение отдельных модулей штекерного соединителя в модульной системе штекерного соединителя может находиться путем последовательной самоконфигурации их так называемых ID («идентификационный номер»), напр., путем последовательной «нумерации по возрастанию», и сообщаться электронике для аналитической обработки. После этого электроника для аналитической обработки может соотносить данные датчиков с соответствующими им модулями штекерного соединителя.
Недостатком этого уровня техники является, что снабженные упомянутыми средствами контакта для взаимной связи модули штекерного соединителя в модульной раме должны присоединяться геометрически непосредственно друг к другу, чтобы создавать не имеющую прерываний линию передачи данных. Но на рынке уже существует множество обычных модулей штекерного соединителя, которые не имеют таких дополнительных средств контакта. Поэтому расположение модулей штекерного соединителя в модульной раме ограничено в том отношении, что при необходимости все обычные модули должны быть расположены друг за другом на удаленном от главного модуля конце модульной рамы. Кроме того, для передачи данных те модули штекерного соединителя, которые имеют упомянутые средства контакта, должны присоединяться непосредственно друг к другу, т.е. не разрешается оставлять между ними или занимать обычным модулем свободное место для вставления.
На практике оказалось, что этот недостаток гибкости может иногда создавать большие проблемы, например, когда определенная последовательность модулей штекерного соединителя задана определенной целью применения, напр., заданной конструкцией ответного штекера. В частности, это имеет место, когда также ответный штекер имеет такую модульную систему штекерного соединителя, имеющую подчиненные модули, которые подвержены сравнимым ограничениям их расположения. В частности, с этой точки зрения особенно проблематична необходимость размещения главного модуля на одном конце данной модульной рамы, а стандартных модулей штекерного соединителя на другом конце данной модульной рамы. По другому аспекту при определенных обстоятельствах может быть значительно затруднен поиск ошибок, так как таким образом сравнительно сложно отыскать из множества подчиненных модулей дефектный или только условно работоспособный подчиненный модуль.
Постановка задачи
Задача изобретения заключается в том, чтобы предложить модульную систему штекерного соединителя, имеющую шину данных, которая преодолеет вышеназванные проблемы, и является по возможности свободно конфигурируемой по геометрическому расположению своих модулей, в частности своих главного и подчиненных модулей.
Эта задача решается с помощью предмета независимых пунктов формулы изобретения.
Предпочтительные варианты осуществления изобретения указаны в зависимых пунктах формулы изобретения.
Предлагаемая изобретением модульная система штекерного соединителя имеет следующее:
a. модульную раму для прямоугольного штекерного соединителя, причем эта модульная рама имеет две противоположные длинные боковые части;
b. шинную систему, включающую в себя по меньшей мере одну шину данных, имеющую по меньшей мере одну проходящую по меньшей мере по одной из двух длинных боковых частей в продольном направлении проводящую дорожку для электронной передачи данных;
c. расположенный или располагаемый в модульной раме главный модуль, имеющий по меньшей мере один электрический шинный контакт для отправки запросов и для приема ответов через шину данных;
d. несколько расположенных или располагаемых в модульной раме подчиненных модулей, имеющих по меньшей мере по одному электрическому шинному контакту для приема запросов от главного модуля и для отправки ответов главному модулю;
при этом
e. главный модуль и подчиненные модули соединены друг с другом своим соответственно по меньшей мере одним шинным контактом электропроводящим образом через указанную по меньшей мере одну проводящую дорожку в виде параллельной схемы.
Предлагаемый изобретением способ измерения служит для измерения измеряемой величины по меньшей мере в одном подчиненном модуле модульной системы штекерного соединителя и для передачи соответствующих данных измерения от подчиненного модуля к главному модулю модульной системы штекерного соединителя и имеет следующие этапы:
A). главный модуль адресуется к нескольким подчиненным модулям в соответствии с положением вставления соответствующего подчиненного модуля в модульной раме;
B). главный модуль через шину данных требует от подчиненных модулей соответственно метку;
C). подчиненные модули передают соответственно свою метку через шину данных главному модулю;
D). главный модуль распознает вид соответствующего подчиненного модуля по его метке;
E). главный модуль загружает соответственно подходящую к виду подчиненного модуля программу программного обеспечения из внешнего источника;
F). главный модуль запоминает программы программного обеспечения в комбинированной памяти программ/данных;
G). главный модуль обеспечивает выполнение соответствующих программ программного обеспечения с помощью принадлежащего главному модулю микропроцессора, при этом он передает подчиненному модулю отдельные указания через шину данных;
– G1) главный модуль обеспечивает выполнение своим микропроцессором по меньшей мере одной программы программного обеспечения, которая дает команду по меньшей мере одному из подчиненных модулей измерять по меньшей мере одну измеряемую величину и сохранять соответствующие данные измерения;
H). главный модуль через шину данных запрашивает у соответствующего подчиненного модуля данные измерения;
I). соответствующий подчиненный модуль отправляет главному модулю запрошенные данные измерения;
J). главный модуль запоминает данные измерения, как относящиеся к указанному подчиненному модулю, в комбинированной памяти программ/данных.
Главный модуль и подчиненные модули обычно представляют собой специальные модули штекерного соединителя, которые отличаются своими соответствующими свойствами, напр., своими описанными выше в пункте c. и d. шинными контактами. Как правило, подчиненные модули имеют соответствующие контакты для вставного соединения, напр., для передачи электрической энергии и/или данных на ответный штекер, в частности на соответствующие модули ответного штекера. Кроме того, подчиненные модули могут иметь определенные датчики, такие как, напр., датчики тока, напряжения и/или температуры, напр., для контролирования электрического тока через эти вставные соединительные контакты и/или для измерения их температуры. В качестве других возможных датчиков могут быть предусмотрены, но не ограничиваясь ими: вибрационные датчики для измерения вибраций, напр., в железнодорожной области; датчики давления для измерения давления, напр., в пневматических модулях, которые предусмотрены, например, для передачи давления воздуха; световые датчики для контроля модулей световых волноводов, напр., путем измерения рассеянного света, а также энергетических модулей для измерения электрической энергии. Но некоторые подчиненные модули могут также представлять собой модули обработки данных, например, модули, которые содержат свитч данных.
Главный модуль может иметь средства для обработки данных и для управления потоком передачи данных на шине данных и для этого, в частности, иметь память данных и микропроцессор. Память данных может, разумеется, служить также для того, чтобы держать в ней программы программного обеспечения, так что в этом случае речь идет, строго говоря, о комбинированной памяти программ/данных. Но для ясности эта комбинированная память программ/данных называется также памятью данных, так как, разумеется, программные команды тоже имеются в виде цифровых данных.
Под термином «модули» далее могут пониматься те составные части модульной системы штекерного соединителя, имеющие корпус модуля, который соответствует по форме корпусу известных модулей штекерного соединителя, то есть может в той же форме механически вводиться и крепиться в указанной модульной раме или же в сравнимой модульной раме, напр., ответного штекера. То есть к ним, наряду с известными модулями штекерного соединителя и главными, а также подчиненными модулями, могут относиться, напр., также модули энергоснабжения и разделительные модули, причем последние предусмотрены для того, чтобы располагаться в ответном штекере, что далее еще будет поясняться подробнее.
Названная в пункте b. шина данных может представлять собой так называемую «главную/подчиненную шину», в частности так называемую «I2C–шину» (Inter–Integrated Circuit, англ. схема внутренней связи) и/или, напр., так называемую «SM–шину» (System Management Bus, шина системного управления).
При этом под главной/подчиненной шиной следует понимать шину данных, которая, как известно специалисту, имеет следующий принцип действия: один из участников является главным, все другие подчиненные. Главный единственный имеет право без требования получать доступ к общему ресурсу, в этом случае шине данных. Подчиненный не может сам по себе получать доступ к общему ресурсу; он должен ждать, пока он получит запрос от главного, или через проходящее через этот общий ресурс соединение показывать главному, что он хочет получить запрос.
Так как упомянутая в пункте a. модульная рама является составной частью прямоугольного штекерного соединителя, она имеет предпочтительно прямоугольную в поперечном сечении форму, имеющую две длинные и две короткие стороны. Длинные стороны относятся к выполненным, в частности, по существу плоско, упомянутым в пункте a. длинным боковым частям, которые в смонтированном состоянии могут быть также ориентированы по существу в направлении вставления. Если модульная рама представляет собой, например, так называемую «шарнирную раму», то боковые части для помещения модулей штекерного соединителя могут откидываться посредством шарнира. После вставления модулей в модульную раму боковые части снова захлопываются, чтобы удерживать между собой модули, в частности с применением средств стопорения.
Для окончательной фиксации с силовым замыканием модулей в шарнирной раме боковые части, напр., путем привертывания шарнирной рамы к какой–либо поверхности, напр., во внутренний фланец корпуса штекерного соединителя, снова фиксируются, будучи ориентированы в направлении вставления и вместе с тем параллельно друг другу. При этом модули штекерного соединителя могут по меньшей мере с силовым замыканием и, в частности, также по меньшей мере в отдельных областях с геометрическим замыканием и предпочтительно с особенно высокой удерживающей силой фиксироваться между боковыми частями в модульной раме.
В другой конструктивной форме боковые части модульной рамы могут иметь пружинящие области, напр., упругие щечные поверхности, которые, в частности, имеют лапки, предпочтительно снабженные средствами стопорения, причем эти пружинящие области предназначены для того, чтобы фиксировать модули в модульной раме. Тогда модули штекерного соединителя могут просто и предпочтительно также из направления присоединения кабеля и в направлении вставления вдвигаться в модульную раму и застопориваться на ней. Эта конструктивная форма имеет, в принципе, то преимущество, что модули могут вставляться и извлекаться по отдельности, без ухудшения этим крепления других модулей.
В частности, подчиненные модули могут быть соединены с главным модулем через шину данных с помощью структуры передачи данных в форме точки звезды, при этом главный модуль образует точку звезды.
Предпочтительно главный и подчиненные модули могут электрически контактировать с упомянутой в пункте b. проводящей дорожкой шины данных, имеющую соответствующие электрические шинные контакты, для взаимного двунаправленного обмена данными и при этом с электронной точки зрения включены параллельно друг другу. Наконец, шинные контакты соответствующего подчиненного модуля соединены при этом через шину данных электропроводящим образом и непосредственно с шинными контактами главного модуля. С информационно–технической точки зрения при этом создается существенная предпосылка для соединения главного модуля с подчиненными модулями в форме точки звезды, потому что при этом каждый подчиненный модуль имеет возможность непосредственно, то есть без обходного пути через другие подчиненные модули, поддерживать связь с главным модулем.
Кроме того, структура передачи данных в форме точки звезды может быть обеспечена, во–первых, за счет того, что главный модуль сам активно отправляет данные через шину данных одному из подчиненных модулей, напр., когда в определенный момент времени он посылает запрос одному из подчиненных модулей. Во–вторых, главный модуль заботится также о том, чтобы ему в каждый момент времени отвечал максимум только один единственный, в этом случае получивший запрос подчиненный модуль. Посредством протокола передачи, сохраненного в памяти данных главного модуля, и посредством принадлежащего главному модулю микропроцессора главный модуль устанавливает соответствующий протокол шины, в частности «протокол главной/подчиненной шины», напр., протокол I2C–шины, и тем самым заботится о том, чтобы всегда только один подчиненный модуль непосредственно поддерживал связь с главным модулем, в то время как другие подчиненные модули молчат. В частности, каждый подчиненный модуль отвечает исключительно на запросы главного модуля.
Кроме того, главный модуль различимым образом заканчивает свои запросы каждому подчиненному модулю и ждет со своим следующим запросом, пока подчиненный модуль не даст полный ответ. Разумеется, подчиненный модуль тоже отвечает только после того, как главный модуль различимым образом закончил свой запрос. Тем самым обеспечивается, что в какой–либо момент времени на шине данных разговаривает не больше одного участника, и каждый подчиненный модуль поддерживает связь исключительно непосредственно с главным модулем.
Благодаря этому разделению во времени сообщений на шине данных для собственной передачи данных теоретически достаточно одной единственной проводящей дорожки, что представляет собой очень предпочтительный вариант в связи с небольшой потребностью в площади для этой цели применения. С другой стороны, на практике оказалось чрезвычайно предпочтительным для механической прочности и гибкости передачи данных, когда шина данных имеет по меньшей мере две проводящие дорожки, при этом первая из этих двух проводящих дорожек предусмотрена для упомянутой передачи данных, а вторая проводящая дорожка для синхронизации («часы»).
Этот вид синхронизации позволяет, чтобы, например, подчиненное устройство, которому, напр., нужно больше времени для внутренних процессов, напр., процессов измерения, могло периодически снижать тактовую частоту с помощью так называемого «Clock Stretching» (англ. удержание тактовых импульсов), чтобы затормаживать главный модуль и вместе с тем ход выполнения процесса, не ставя при этом под вопрос основной принцип структуры шины данных, базирующейся на главном–подчиненном устройстве.
Модульная система штекерного соединителя может, кроме того, иметь две дополнительные проводящие дорожки для электроснабжения подчиненных модулей. Тогда, например, первая из этих двух дополнительных проводящих дорожек может быть постоянно токоведущей, напр., проводящей постоянный ток, и, таким образом, может служить для электрического энергоснабжения подчиненных модулей и/или главного модуля. Питающее напряжение этого энергоснабжения может составлять, напр., от 1 В до 6 В, предпочтительно от 2 В до 4,5 В и в частности, 3,3 В.
Вторая другая проводящая дорожка может, например, представлять собой линию массы для присоединения массы подчиненных модулей и/или главного модуля, так чтобы электроснабжение имело при этом соответствующий ему потенциал массы. Этот потенциал массы может также использоваться как опорный потенциал для других электронных схем и таким образом служить также, напр., опорным потенциалом для электрической передачи данных.
Кроме того, может быть предусмотрена по меньшей мере одна дополнительная проводящая дорожка, напр., по стандарту MS–шины, в качестве так называемой «линии прерываний», напр., чтобы обеспечивать возможность каждому подчиненному модулю как можно быстрее активно указывать главному модулю на наличие неисправного состояния, например, на возникновение кратковременного перенапряжения и/или кратковременно очень высокого тока и/или особенно высокой температуры и пр. по меньшей мере на одном из своих контактов штекерного соединителя. Так, сообщение главному модулю о неисправном состоянии может осуществляться, в частности, посредством так называемой функции тревоги («Alert»), при которой достаточно какого–либо электрического сигнала, напр., электрического импульса, на шине прерываний, чтобы инициировать прерывание главного устройства. При этом не важно, какой подчиненный модуль отправляет этот импульс, и отправляют ли, возможным образом, несколько подчиненных модулей этот импульс одновременно или по меньшей мере почти одновременно. Тогда программа программного обеспечения, выполняемая именно в этот момент времени главным модулем, наиболее быстрым возможным образом прерывается в том месте, именно в котором она находится, и вследствие тревоги прерывания сразу же переходит на предусмотренную для этого, так называемый «алгоритм прерываний». В настоящем случае этот алгоритм прерываний выполнен так, что он дает команду главному модулю через линию передачи данных считывать из каждого из подчиненных модулей соответственно принадлежащий ему так называемый «регистр сервиса прерываний», чтобы узнавать, каким подчиненным модулем была инициирована тревога прерывания и что инициировало это прерывание (напр., перенапряжение на контакте упомянутого подчиненного модуля). Регистр сервиса прерываний ранее при инициировании прерывания, напр., датчиком модуля, был снабжен соответствующей информацией о причине прерывания. Идентификация модуля, в отличие от этого, может вытекать, в частности, из положения модуля в модульной раме и присваиваться главным модулем путем электронной адресации, как это в качестве примера излагается далее.
Для идентификации геометрического положения данного подчиненного модуля в модульной раме в шинной системе может быть предусмотрена другая область контакта, в частности другой контактный столбик, который далее в соответствии с его функцией называется контактным столбиком сопротивления. Для этого в каждом месте вставления модуля расположено по электрическому сопротивлению и включено между контактным столбиком сопротивления и проводящей потенциал массы другой проводящей дорожкой. В частности, для этого электрическое сопротивление, напр., имеющееся в продаже угольное сопротивление или металлопленочное сопротивление, может быть своим первым разъемом электропроводящим образом соединено с контактным столбиком сопротивления, а своим вторым разъемом с линией массы, напр., припаяно. Величины электрических сопротивлений различных мест вставления модулей значительно отличаются друг от друга, чтобы таким образом обеспечивать возможность электронной идентификации положения вставления соответствующего подчиненного модуля. В частности, эти электрические сопротивления в лабораторных условиях представляют собой омические сопротивления, которые измеримым образом отличаются друг от друга по своей величине.
Таким образом, величина каждого электрического сопротивления выбрана в зависимости от положения. Это служит для обозначения этого положения в модульной раме с возможностью электронного считывания. Так каждый подчиненный модуль может подавать в данную область контакта, в частности на данный контактный столбик заданное электрическое напряжение и измерять соответствующий ток и, напр., передавать его величину по соответствующему запросу главному модулю, так чтобы главный модуль мог находить положение соответствующего подчиненного модуля по величине тока, т.е. косвенным образом по данному омическому сопротивлению. Например, первое место вставления модуля может иметь омическое сопротивление R1=100 Ом, второе место вставления модуля омическое сопротивление R2=200 Ом, третье место вставления модуля омическое сопротивление R3=400 Ом, и пр.
При подаче заданного электрического напряжения, например, 1 В, в первом месте вставления первого подчиненного модуля измерялся бы первый ток I1=0,01А. Это значение может оцифровываться первым подчиненным модулем и запрашиваться главным модулем. После этого главный модуль, напр., посредством заложенной в памяти данных таблицы, может присваивать этому подчиненному модулю на основании тока, т.е. на основании электрического сопротивления и вместе с тем на основании его геометрического положения, определенный идентификационный номер (ID), напр., в этом случае ID 1, который соответствует первому месту вставления модуля.
Другой подчиненный модуль может находиться, например, во втором месте вставления модуля. Тогда этот другой подчиненный модуль измерял бы второй ток I2=0,005 А, это значение по запросу передавалось бы главному модулю и таким же образом содержало бы ID 2.
Альтернативно этому второе место вставления модуля могло бы также оставаться свободным, то ест сначала не быть занято никаким подчиненным модулем. Другой подчиненный модуль мог бы вместо этого вставляться в какое–либо другое место вставления модуля, напр., в третье место вставления модуля модульной рамы. В этом случае он таким же образом получил бы принадлежащий третьему месту вставления модуля идентификационный номер, например, ID 3.
Тогда сравнимое относится, разумеется, и к другим подчиненным модулям, т.е. они измеряют значение электрического сопротивления, т.е. электрического тока при известном подаваемом напряжении, соответственно в своем месте вставления модуля и передают значащее для него значение главному модулю. Главный модуль с помощью своей заложенной в памяти таблицы присваивает соответствующему электрическому сопротивлению номер места вставления модуля, который одновременно служит основой ID данного подчиненного модуля.
Это имеет особое преимущество, потому что подчиненные модули таким образом могут распределяться в модульной раме практически любым образом. То есть они не должны геометрически непосредственно присоединяться друг к другу. При этом, например, одно или несколько мест вставления модулей между подчиненными модулями по меньшей мере периодически могут оставаться свободными, или между подчиненными модулями могут быть расположены также обычные (т.е. стандартные) модули, которые отличаются, в т.ч., тем, что они не имеют шинных контактов. Тем не менее, указанная адресация может производиться автоматически в зависимости от геометрического положения данных модулей и таким образом давать сведения о геометрическом положении данного подчиненного модуля.
Это особенно предпочтительно, когда как в штекерном соединителе, так и в ответном штекере имеется по соответствующей модульной системе штекерного соединителя. Наконец, на практике чаще всего подчиненные модули и обычные (стандартные) модули штекерного соединителя и ответного штекера находятся друг напротив друга и вставляются друг в друга. Поэтому на практике вряд ли возможно расположить в каждой модульной раме обычные (стандартные) модули на одном конце, а главный модуль на другом конце, а подчиненные модули между ними и непосредственно примыкая друг к другу и к главному модулю, что соответствовало бы ограничениям уровня техники.
Предпочтительно при этом также из уже укомплектованной модульной системы штекерного соединителя могут впоследствии выниматься модули и/или добавляться модули без изменения конфигурации модулей, остающихся в модульной раме. Первоначальное распределение указанных ID для них сохраняется и является также воспроизводимым, то есть, напр., при новом распределении, если это однажды становится необходимым по техническим причинам программного обеспечения, автоматически будет снова совпадать с первоначальным распределением, пока каждый из этих модулей остается в одном и том же месте вставления модуля.
В одном из предпочтительных вариантов осуществления главный модуль имеет электронику для аналитической обработки, имеющую управляющую электронику для регулирования передачи данных на шине данных, чтобы таким образом распознавать помещенные в модульной системе штекерного соединителя модули штекерного соединителя, присваивать их идентификационный номер их соответствующему геометрическому положению в модульной раме и также передавать и присваивать значения измерения от расположенных в модулях штекерного соединителя датчиков соответствующему модулю штекерного соединителя и соответственно обрабатывать.
При этом непосредственное и простое информационно–техническое отображение мест вставления модулей соответствующими идентификационными номерами (ID) имеет также особые преимущества для способности модульной системы штекерного соединителя к сетевой работе.
В частности, главный модуль имеет для этого внешний сетевой интерфейс, чтобы передавать через него во внешнюю сеть по меньшей мере некоторые из значений измерения и/или рассчитанные по ним величины в виде данных измерения.
Но, кроме того, в памяти данных главного модуля может быть также заложено соответствующее индивидуальное программное обеспечение подчиненных модулей. С помощью этого программного обеспечения может осуществляться управление, например, процессами измерения и/или режимом связи подчиненных модулей. Но программное обеспечение может также альтернативно или дополнительно быть связано со способностью подчиненных модулей к сетевой работе по отношению к внешней сети, как будет подробнее поясняться далее.
Индивидуальное программное обеспечение подчиненных модулей, которое, в частности, по меньшей мере частично имеется в виде так называемых «контейнеров программного обеспечения», может, напр., через сетевой интерфейс главного модуля, загружаться в память данных, как только соответствующий подчиненный модуль вставляется в модульную раму и распознается главным модулем. Для этого предпочтительно, когда модули имеют метку, из которой следует, какого вида данный подчиненный модуль и какое программное обеспечение должен загружать главный модуль. Например, подчиненный модуль может представлять собой модуль измерения тока, напряжения или температуры, каждому из которых соответствует другое программное обеспечение. Но речь может идти также об информационно–техническом модуле, который, например, содержит так называемый свитч данных, так что программное обеспечение этого вида модуля значительно отличается от вида модуля измерения тока, вида модуля измерения напряжения или вида модуля измерения температуры.
Эту метку главный модуль может запрашивать у соответствующих подчиненных модулей и сохранять в своей памяти данных, напр., в своей упомянутой таблице вместе с соответствующим ID как принадлежащую данному модулю. Кроме того, это индивидуальное программное обеспечение может также стираться из памяти данных, как только соответствующих подчиненный модуль удаляется из модульной рамы. Этот принцип допускает сколь угодно переконфигураций модульной системы штекерного соединителя, т.е. сколь угодно подчиненных модулей могут извлекаться из модульной системы штекерного соединителя и добавляться в нее без увеличения при этом потребности в памяти данных и/или превышения когда–либо при этом выполненной с подобающим размером емкости памяти данных, так как ненужное программное обеспечение автоматически стирается, а нужнее программное обеспечение автоматически догружается.
В одном из предпочтительных вариантов осуществления программное обеспечение двух однотипных модулей для экономии места в памяти может быть заложено в память данных только один раз. Тогда, несмотря на это, должны, разумеется, запоминаться особо индивидуальные данные каждого модуля.
Главный модуль может присваивать каждому подчиненному модулю для его способности к сетевой работе во внешней сети дополнительно к упомянутому принадлежащему ему ID другой виртуальный идентификационный номер для внешней сети, то есть дополнительно создавать возможность адресации к подчиненному модулю из внешней сети. Этот виртуальный ID главный модуль может присваивать в упомянутой таблице указанному ID модуля и/или закладывать в свою память данных вместе с индивидуальным программным обеспечением каждого модуля. Тогда с позиции сети каждый подчиненный модуль кажущимся образом непосредственно, но фактически в виде виртуального участника сети, обладает возможностью адресации и обращения, т.е. внешняя сеть поддерживает связь кажущимся образом непосредственно с этим виртуальным подчиненным модулем, а именно, с программным обеспечением данного подчиненного модуля, через его виртуальный ID. Таким образом внешняя сеть может непосредственно обмениваться данными, напр., данными измерения, с подчиненным модулем и/или управлять процессами, напр., процессами измерения подчиненного модуля, даже когда этот обмен данными, с физической точки зрения, сначала происходит только между внешней сетью и главным модулем. Другими словами, главный модуль может отображать по отношению к сети управляемые им подчиненные модули, так что сеть может без изменений или дополнительной информации получать доступ к подчиненным модулям.
Предпочтительно такой принцип, благодаря особенно ясной структуре выдачи указанных ID и их геометрического присвоения данным местам вставления модулей в модульной раме особенно прост в использовании. В частности, тот факт, что применительно к остающимся в модульной раме подчиненным модулям не происходят переструктурирования даже при извлечении других подчиненных модулей, имеет большое преимущество как для ясности программирования, так и для эксплуатационной надежности модульной системы штекерного соединителя, а также для возможности ручного обслуживания. При этом может значительно улучшаться соотношение между стоимостью изготовления и качеством модульной системы штекерного соединителя.
В одном из предпочтительных вариантов осуществления модульная система штекерного соединителя может иметь шинную систему, имеющую всего пять сплошных проводящих дорожек, а именно, две упомянутые проводящие дорожки для шины данных (данные, часы), две дополнительные проводящие дорожки для электроснабжения (питающее напряжение, потенциал массы), а также упомянутую дополнительную проводящую дорожку в качестве линии прерываний.
Но в других вариантах осуществления, в зависимости от данной цели применения или от определенных электронных концепций, для реализации описанной концепции шины может быть предусмотрено другое число проводящих дорожек. Во–первых, число сплошных проводящих дорожек определяется данной концепцией электроснабжения и замыкания на массу, во–вторых, данной концепцией шины данных. Под термином «сплошные проводящие дорожки» следует понимать проводящие дорожки, которые способны соединять расположенные в модульной раме подчиненные модули электропроводящим образом, т.е. главный модуль и каждый помещенный в модульную раму подчиненный модуль электрически контактирует со сплошной проводящей дорожкой своими шинными контактами.
Проводящие дорожки шинной системы могут быть при необходимости интегрированы в по меньшей мере одну печатную плату. Предпочтительно эта печатная плата может быть расположена с геометрическим замыканием в выемке боковой части модульной рамы и, в частности закреплена на ней путем приклеивания. Печатная плата может быть установлена в или на одной из двух длинных боковых частей модульной рамы так, чтобы ее передняя сторона указывала внутрь модульной рамы. Альтернативно или дополнительно все или некоторые из проводящих дорожек могут также интегрироваться в модульную раму по так называемой MID (Moulded Interconnection Device)–технологии, в частности когда модульная рама представляет собой пластмассовую удерживающую раму. Проводящие дорожки на направленной внутрь передней стороне для контактирования с каждым шинным контактом как каждого подчиненного модуля, так и главного модуля, могут иметь по меньшей мере по одной поверхности контактирования и/или по меньшей мере одной области контактирования.
Проводящие дорожки проходят предпочтительно в продольном направлении по существу по всей боковой части. Например, некоторые из проводящих дорожек могут проходить на передней стороне печатной платы, а другие на задней стороне печатной платы. При многослойной печатной плате поводящие дорожки могут также проходить внутри печатной платы. Кроме того, некоторые или все проводящие дорожки могут отдельными участками проходить на передней стороне печатной платы и/или отдельными участками на задней стороне печатной платы и/или отдельными участками внутри многослойной печатной платы. Например, какая–либо проводящая дорожка может быть на передней стороне прервана, однако в этой области быть перемкнута сегментом проводящей дорожки задней стороны, т.е. расположенные на передней стороне части проводящей дорожки соединяются друг с другом электропроводящим образом своим задним мостиком, так что вся проводящая дорожка может считаться сплошной. Альтернативно или дополнительно несколько, например, два контактных столбика могут быть на передней стороне соединены друг с другом короткой проводящей дорожкой на задней стороне в виде мостика. Таким образом для каждого подчиненного модуля одна или несколько областей контакта, в частности контактных столбиков, могут быть расположены рядом друг с другом в продольном направлении на печатной плате. Благодаря этому каждому подчиненному модулю могут предоставляться несколько сдвинутых друг относительно друга в продольном направлении областей контакта, в частности контактных столбиков, что значительно облегчает конструкцию модулей, в частности расположение шинных контактов на корпусе модуля. В частности, таким образом могут предоставляться несколько контактных столбиков для одной и той же функции геометрически особенно подходящим образом для гибкого контактирования с помощью различных и/или различно ориентированных модулей, в частности когда они перемкнуты на задней стороне печатной платы, т.е. соединены друг с другом электропроводящим образом сравнительно короткой проводящей дорожкой.
В большинстве случаев достаточно вставить главный и подчиненные модули в одинаковой ориентации в их соответствующую удерживающую раму. Когда таким образом комплектуются две модульные рамы, то одна из них может применяться для штекера, а другая для соответствующего ему ответного штекера.
Тогда при предписанном вставлении друг в друга штекера и ответного штекера обычно вставляемые лицевые части подчиненных модулей и модулей штекерного соединителя автоматически ориентируются друг к другу и так могут вставляться друг в друга, если их вставляемые лицевые части подходят друг к другу, напр., когда они выполнены как «папа» и «мама» и соответствуют одному и тому же стандарту штекерных соединителей, а также при необх. закодированы подходящим друг к другу образом, и пр. Под термином «модули» могут также пониматься, как уже упомянуто, в т.ч. главный и/или подчиненные модули, а также, напр., описанные далее энергетические и разделительные модули, которые в этом отношении имеют некоторые особенности.
Для определенных целей применения может быть, в частности, особенно предпочтительно, когда модули штекерного соединителя и модули ответного штекера во вставленном состоянии штекера и ответного штекера указывают в одинаковом направлении. Для этого по меньшей мере некоторые модули в одной из двух модульных рам должны располагаться, будучи ориентированы обратным образом.
Такая обратная ориентация двух вставляемых друг в друга модулей может быть целесообразна, напр., между главным модулем штекерного соединителя и модулем энергоснабжения ответного штекера. Такой модуль энергоснабжения служит, напр., для буферизации электрической энергии, напр., для перекрытия времени периода, в который модульная система штекерного соединителя не имеет кабельного энергоснабжения.
Другая цель применения обратной ориентации двух вставляемых друг в друга модулей может касаться главного модуля штекерного соединителя и разделительного модуля ответного штекера. Характерное применение такой комбинации главного и разделительного модуля заключается в том, что как штекерный соединитель, так и ответный штекер имеют модульную систему штекерного соединителя. Разумеется, тогда каждая из этих двух модульных систем штекерного соединителя могла бы иметь собственный главный модуль. Однако при сравнении это в высшей степени нерентабельно. Поэтому один из предпочтительных вариантов осуществления предусматривает, что только штекерный соединитель имеет главный модуль. В ответном штекере, в отличие от этого, предусмотрен вставляемый в главный модуль разделительный модуль, который предназначен для того, чтобы взаимодействовать с главным модулем штекерного соединителя и образовывать с ним, при совместном рассмотрении, один общий главный модуль для обеих модульных систем штекерного соединителя, и так объединять их в одну общую модульную систему штекерного соединителя. Для этого главный и разделительный модуль могут располагаться в соответствующих друг другу местах вставления данной удерживающей рамы штекерного соединителя и ответного штекера, так чтобы они при вставлении штекерного соединителя и ответного штекера могли информационно–технологически соединяться друг с другом, в частности через общий USB–интерфейс.
Кроме того, разделительный модуль имеет шинные контакты для электрического контактирования с шинной системой ответного штекера. В одном из предпочтительных вариантов осуществления разделительный модуль может осуществлять первичную обработку принятых данных и через общий интерфейс передавать главному модулю. Тогда главный модуль может принимать эти сигналы в виде другой шины данных, в частности посредством своего микропроцессора, и обрабатывать с помощью микропроцессора и заложенного в памяти данных другого шинного протокола. При этом идентификационные номера модулей ответного штекера могут соответственно обозначаться и/или изменяться, чтобы различимым образом отличать эти модули от модулей штекерного соединителя, в частности по отдельности, и/или маркировать в виде группы как принадлежащие к этому ответному штекеру. Альтернативно этому разделительный модуль может также просто передавать линии шинной системы ответного штекера главному модулю. Тогда главный модуль может электропроводящим образом соединять их с шинной системой штекерного соединителя, так что шинная система штекерного соединителя просто расширяется шинной системой ответного штекера. Главный модуль работает, как описано выше, и таким образом должен только управлять более высоким количеством подчиненных модулей, а именно, дополнительно подчиненными модулями ответного штекера. Для этого подчиненные модули могут быть либо надлежащим образом расположены в удерживающей раме – в одной из предпочтительных концепций каждый подчиненный модуль соединяется вставлением с обычным модулем – и/или на данных удерживающих рамах могут быть надлежащим образом расположены и/или выбраны сопротивления, и/или разделительный модуль модифицирует соответственно информацию, касающуюся данного идентификационного номера и, в частности, геометрического расположения модулей. Предпочтительно главный модуль может при этом отличать модули ответного штекера от модулей штекерного соединителя по отдельности и предпочтительно также в виде группы.
Как и при уже описанном вставлении нового подчиненного модуля, главный модуль может, таким образом, при вставлении друг в друга с разделительным модулем распознавать подчиненные модули ответного штекера и, если необходимо, напр., через внешнюю сеть затребовать и закладывать в свою память данных соответствующее каждому из них программное обеспечение. Таким образом главный модуль может дополнительно к подчиненным модулям штекерного соединителя управлять также подчиненными модулями ответного штекера.
При применении разделительного модуля можно особенно отчетливо понять преимущества предлагаемой изобретением возможности свободной конфигурации. В уровне техники, в частности, как в штекерном соединителе, так и в ответном штекере все подчиненные модули должны быть расположены в области главного и разделительного модуля, что не имеет технически ощутимой пользы для большинства целей применения. Наконец, как правило, мало смысла в том, чтобы присоединять друг к другу два модуля измерения тока. В отличие от этого, обычное применение заключается в том, чтобы присоединять модуль измерения тока к обычному (стандартному) модулю. Но для этого этот обычный модуль должен также находиться в соответствующем месте вставления модуля в модульной раме, что в уровне техники по вышеназванным причинам было бы по меньшей мере проблематично, но в соответствии с изобретением в упомянутой свободно конфигурируемой форме может осуществляться без затруднений.
По причинам унификации и стоимости изготовления особенно предпочтительно, для наибольшего возможного количества модулей, в частности для главного и разделительного модуля, а также для энергетического модуля и/или для подчиненных модулей, применять по существу одинаковую конструктивную форму корпуса. При этом термин «по существу» означает, что, напр., шинные контакты у некоторых конструктивных форм выполнены таким образом, что модули могут быть расположены в модульной раме в обратной ориентации относительно направления их вставления и в этой обратной ориентации к тому же способны электрически контактировать со своей шинной системой.
В частности, каждый корпус модуля имеет два стопорных выступа, которые расположены на противоположных друг другу торцевых поверхностях по существу имеющего форму прямоугольного параллелепипеда корпуса модуля. При этом модули могут застопориваться в соответствующих стопорных окошках боковых частей модульной рамы. В частности, эти два предпочтительно прямоугольных в поперечном сечении стопорных выступа отличаются друг от друга своей формой, в частности своим размером, напр., соответствующей длиной. Этими двумя различными стопорными выступами и соответствующими им стопорными окошками двух противоположных друг другу боковых частей задана ориентация модулей в модульной раме применительно к вращению вокруг продольной оси каждого их них.
Однако, как описано ранее, предпочтительно вставлять некоторые модули, напр., энергетические и разделительные модули, в их соответствующие модульные рамы, в этом случае в модульную раму ответного штекера в обратной ориентации применительно к направлению вставления. Эти модули далее называются обратно ориентированными модулями. Они отличаются от других модулей по существу положением их шинных контактов на одинаковом в остальных отношениях корпусе модуля, чтобы иметь возможность контактировать с шинной системой в обратной ориентации.
Для упрощения формулировок далее пусть сторона присоединения кабеля модуля штекерного соединителя, соответствующего корпуса модуля, а также модульной рамы будет считаться верхней, а противоположная соответствующая сторона вставления нижней.
Тогда шинная система на боковых частях модульной рамы предпочтительно расположена под стопорными окошками (со стороны вставления).
Соответственно этому шинные контакты находятся на расположенных в ней корпусах модулей тоже под их стопорными выступами. У обратно ориентированных модулей, в отличие от этого, шинные контакты должны находиться над стопорными выступами, чтобы в смонтированном состоянии можно было контактировать с шинной системой удерживающей рамы ответного штекера.
В соответствии с предшествующими рассуждениями о шинной системе каждый подчиненный модуль может, в частности, иметь шесть шинных контактов, а именно, два для двух линий передачи данных, два для электроснабжения, один для линии прерывания, а также другой для контактирования со столбиком сопротивления. Эти шинные контакты подчиненного модуля соответствуют их внутренней электронике, которая для разных подчиненных модулей, а также для обратно ориентированных модулей является практически одинаковой, и по причинам стоимости выполнены по возможности вместе, серийно на конструктивных элементах подложки схемы, которые изготавливаются предварительно, напр., в виде печатных плат.
Чтобы при изготовлении обратно ориентированных модулей существенные основные элементы электроники, в частности подложки схемы, могли также перениматься по возможности в аналогичной форме, на практике оказалось особенно предпочтительно, когда шинные контакты могут располагаться в горизонтальном направлении по возможности на одной и той же стороне корпуса модуля. Следовательно, положения контактных столбиков шинной системы для обратно ориентированных модулей в горизонтальном направлении должны были бы располагаться со сдвигом. Этому противоречит потребность в возможности располагать все модули в каждом желаемом месте модульной рамы и в возможности применения одной и той же модульной рамы для штекерного соединителя и ответного штекера.
Поэтому, чтобы всегда можно было применять одно и то же расположение проводящих дорожек и контактных столбиков на модульной раме и, в частности, на печатной плате, особенно предпочтительно предусмотреть в шинной системе несколько контактных столбиков для одной и той же функции. Например, для каждого места вставления модуля могут иметься два контактных столбика, которые создают соединение с линией массы. Точно так же при необходимости в каждом месте вставления модуля могут быть расположены несколько, напр., два контактных столбика сопротивления, из которых, в зависимости от ориентации, выборочно только один контактируется с соответствующим шинным контактом данного модуля. Эти два контактных столбика сопротивления могут быть перемкнуты, например, на задней стороне или во внутреннем слое печатной платы, т.е. соединены друг с другом электропроводящим образом, и вместе через соответствующее электрическое сопротивление присоединены к линии массы. Таким образом в одном из особенно предпочтительных вариантов осуществления одна единственная модульная рама может быть предназначена для контактирования с модулями обеих ориентаций.
В другом возможном варианте осуществления на обеих продольных сторонах модульной рамы может быть предусмотрено по полной или частичной шинной системе, и соответствующий модуль может тоже на двух противоположных друг другу торцевых сторонах иметь соответствующие шинные контакты. Тогда, напр., выборочно может применяться одна или другая шинная система, или могут также применяться обе шинные системы. Это решение хотя и является особенно удобным, однако сравнительно дорогим, и поэтому может считаться скорее нерентабельным.
В качестве обобщения и/или дополнения, предлагаемая изобретением модульная система штекерного соединителя имеет следующие преимущества по сравнению с уровнем техники.
Физическое положение модулей, в частности подчиненных модулей, соответствует их номерам ID. Благодаря этому неисправные модули могут легко локализироваться и таким образом, напр., также автоматически заменяться, напр., с помощью робота. Благодаря вышеописанной возможности автоматической самоконфигурации указанных ID и программного обеспечения модульной системы штекерного соединителя становится возможной автоматическая комплектация модульной рамы модулями, напр., подчиненными модулями, и/или автоматический ремонт дефектных и/или адаптация к измененным требованиям. Поиск ошибок дефектных или только условно работоспособных модулей значительно упрощается благодаря шинной структуре в форме точки звезды. К тому же поиск причины ошибки облегчается, в частности, способностью подчиненных модулей к работе в виртуальной сети.
Кроме того, с помощью изобретения уменьшаются или совсем предотвращаются ошибки, в частности ошибки передачи и/или ошибки электронного контактирования системы шины данных, по следующим причинам: расположенные в модульной раме модули, т.е. модули штекерного соединителя, подчиненные модули, главные модули и пр., имеют, как правило, некоторый так называемый «зазор», т.е. они часто удерживаются в модульной раме с определенным механическим допуском. Обычно это считается также желательным, так как по меньшей мере у модулей штекерного соединителя это служит для компенсации соответствующих допусков относительно ответного штекера при процессе вставления. Однако применительно к контактированию главных и подчиненных модулей с общей системой шины данных эти допуски проблематичны. В системе, которая соответствует уровню техники, это приводит в итоге к множеству последовательных возможных ошибок контактирования, каждая из которых, с позиции главного модуля, отделяет лежащие позади него подчиненные модули от шины данных.
В отличие от этого, предлагаемое изобретением решение имеет два существенных преимущества: во–первых, благодаря предлагаемой изобретением параллельной схеме главного и подчиненных модулей возможной ошибкой контактирования затрагивается только тот подчиненный модуль, у которого возникает эта ошибка. Во–вторых, такие ошибки в соответствии с изобретением не возникают, или возникают крайне редко, так как присоединительные столбики имеют достаточный размер, чтобы компенсировать такие механические допуски. Присоединительные столики могут быть составной частью печатной платы или упомянутого MID–покрытия пластмассовой рамы и, как уже описывалось, соединены электропроводящим образом с электрическими проводящими дорожками системы шины данных. При эксплуатации они непосредственно контактируются с шинными контактами расположенных в модульной раме главного и/или подчиненных модулей. Поэтому внутри заданной области, которая задана размером присоединительных столбиков, эти модули могут двигаться в модульной раме, при этом их шинные контакты одновременно поддерживают электрический контакт с присоединительными столбиками.
Другое преимущество заключается в том, что предлагаемая изобретением шинная система является совместимой с более ранними версиями, т.е. в модульной раме могут также применяться обычные модули штекерного соединителя в любом положении вставления, без прерывания потока обмена данными. При этом модульная система штекерного соединителя может свободно адаптироваться к какому угодно и/или как угодно укомплектованному ответному штекеру. В частности, как штекерный соединитель, так и его ответный штекер может иметь модульную систему штекерного соединителя, имеющую подчиненные модули, без возникновения отсюда проблем при их расположении в данной модульной раме.
Предусмотренные для этого модули могут также вставляться в модульную раму в обратной ориентации и присоединяться к шинной системе. Благодаря этому становится возможным, например, также применение разделительного модуля или других расширительных модулей, напр., энергетического модуля в ответном штекере вместе с главным модулем штекерного соединителя. В частности, главный модуль через такой разделительный модуль, как описано выше, может также управлять подчиненными модулями ответного штекера.
В другом предпочтительном варианте осуществления предусмотрено, что в каждом подчиненном модуле расположена, в частности энергонезависимая, память данных. В этой памяти данных заложена таблица, с помощью которой значение электрического сопротивления присвоено соответственно принадлежащему ему месту вставления в модульной раме. Благодаря этому каждый подчиненный модуль может сам распознавать свое собственное положение в модульной раме. В частности, подчиненный модуль может при этом сам выдавать себе соответствующий ID главному модулю, и предпочтительно поддерживать связь с ним по соответствующему запросу главному модулю. Таким образом описанная на этапе A.) способа адресация по этому предпочтительному варианту осуществления может происходить альтернативно или дополнительно к вышеописанному варианту.
Пример осуществления
Один из примеров осуществления изобретения изображен на чертежах и поясняется подробнее далее. Показано:
Фиг.1a, b: один из вариантов осуществления модульной системы штекерного соединителя, соответствующей уровню техники;
Фиг.2a: схематичное изображение расположения модулей в модульной раме, известного из уровня техники;
Фиг.2b: схематичное изображение расположения модулей в модульной раме, предлагаемого изобретением;
Фиг.3a, b: передняя сторона и задняя сторона печатной платы, имеющей проводящие дорожки и присоединительные столбики.
Фигуры содержат частично упрощенные, схематичные изображения. Отчасти для одинаковых, но в данном случае не идентичных элементов применяются идентичные ссылочные обозначения. Разные виды одинаковых элементов могут иметь различный масштаб.
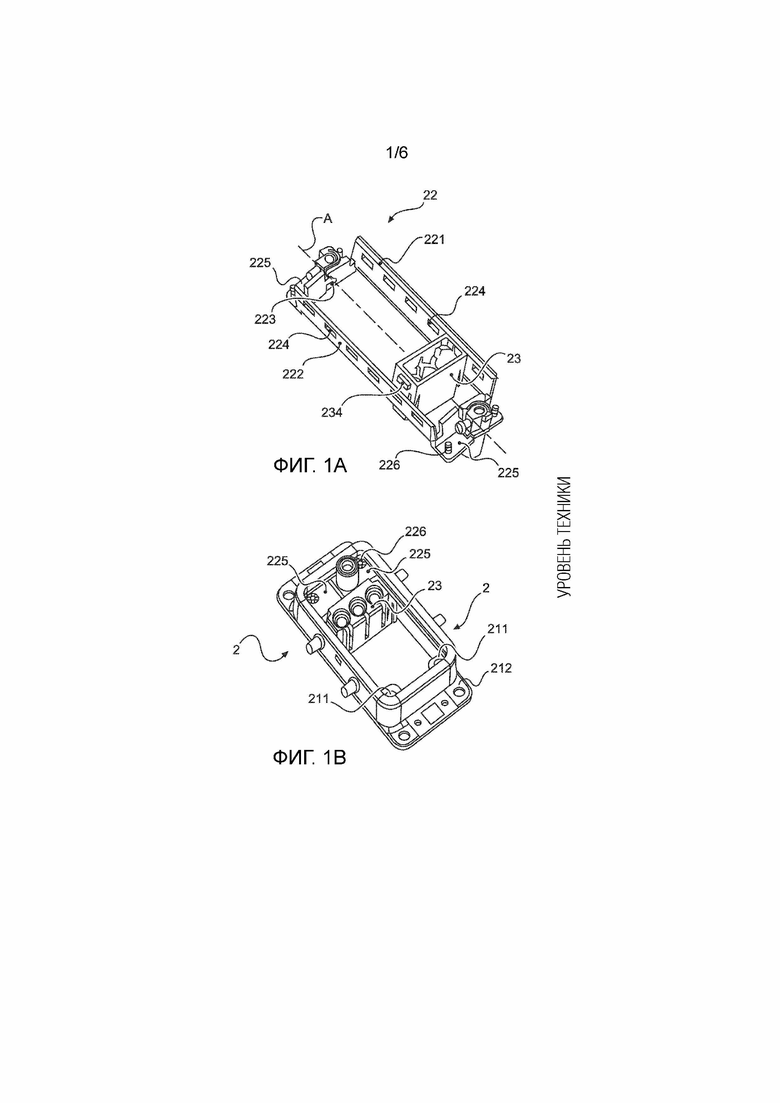
На фиг.1a и 1b, полноты ради, показана модульная система штекерного соединителя, соответствующая уровню техники, которая в качестве примера имеет модульную раму, выполненную в виде шарнирной рамы 22, которая известна в уровне техники из вышеназванной заявки на патент EP 0 860 906 A2.
Штекерный соединитель 2 включает в себя, таким образом, корпус 21 штекерного соединителя и упомянутую шарнирную раму 22.
Шарнирная рама 22 после вставления модулей, в уровне техники обычно стандартных модулей 23 штекерного соединителя, предназначена для встраивания в корпус 21 штекерного соединителя или для крепления через проем крепежной поверхности/монтажной стенки.
Шарнирная рама 22 состоит из двух соединенных с помощью шарниров 223 половин рамы, имеющих крепежные концы 225, которые снабжены крепежными винтами 226. При этом шарниры 223 предусмотрены на крепежных концах 225 шарнирной рамы, причем предусмотрена возможность наклона половин рамы поперек боковых частей 221, 222 шарнирной рамы 22.
Для образования шарниров 223 на каждом их крепежных концов 225 шарнирной рамы предусмотрены паззлоподобные формирования, которые вставляются в соответствующие выемки. При этом эти формирования путем смещения в сторону боковых частей вдвигаются в выемки, причем после этого боковые части могут наклоняться (могут вращаться) вокруг продольной оси A.
В боковых частях 221, 222 половин рамы предусмотрены окошки 224, в которые погружаются стопорные шипы 234 соответствующих модулей 23 при их вставлении в шарнирную раму 22.
Для вставления модулей 2 штекерного соединителя удерживающая рама 2 откидывается, т.е. открывается, причем половины 221, 222 рамы откидываются вокруг шарниров 223 настолько, чтобы могли вставляться модули 23.
Для фиксации половины рамы захлопываются, и обе боковые части 221, 222 при этом ориентируются параллельно друг другу, т.е. шарнирная рама 22 закрывается, причем соответствующие стопорные шипы 234 модулей штекерного соединителя попадают в окошки 224, и осуществляется надежное, с геометрическим замыканием удерживание модулей 23 в шарнирной раме 22.
Наконец, на фиг.2b показана такая модульная рама 22, вставленная в корпус 21 штекерного соединителя. При этом здесь выбран рассеченный вид модульной рамы 22, чтобы можно было лучше различить подробности. Путем привертывания модульной рамы 22 к лежащим в плоскости крепления крепежным проушинам 221 в углах корпуса окончательно фиксируется закрытое положение шарнирной рамы 22.
Этот вариант осуществления этой модульной системы штекерного соединителя и соответствующей модульной рамы упомянут в качестве примера. В других вариантах осуществления возможно также применение иначе выполненных модульных рам, которые крепят модули и таким образом выполняют сравнимую функцию для модульной системы штекерного соединителя.
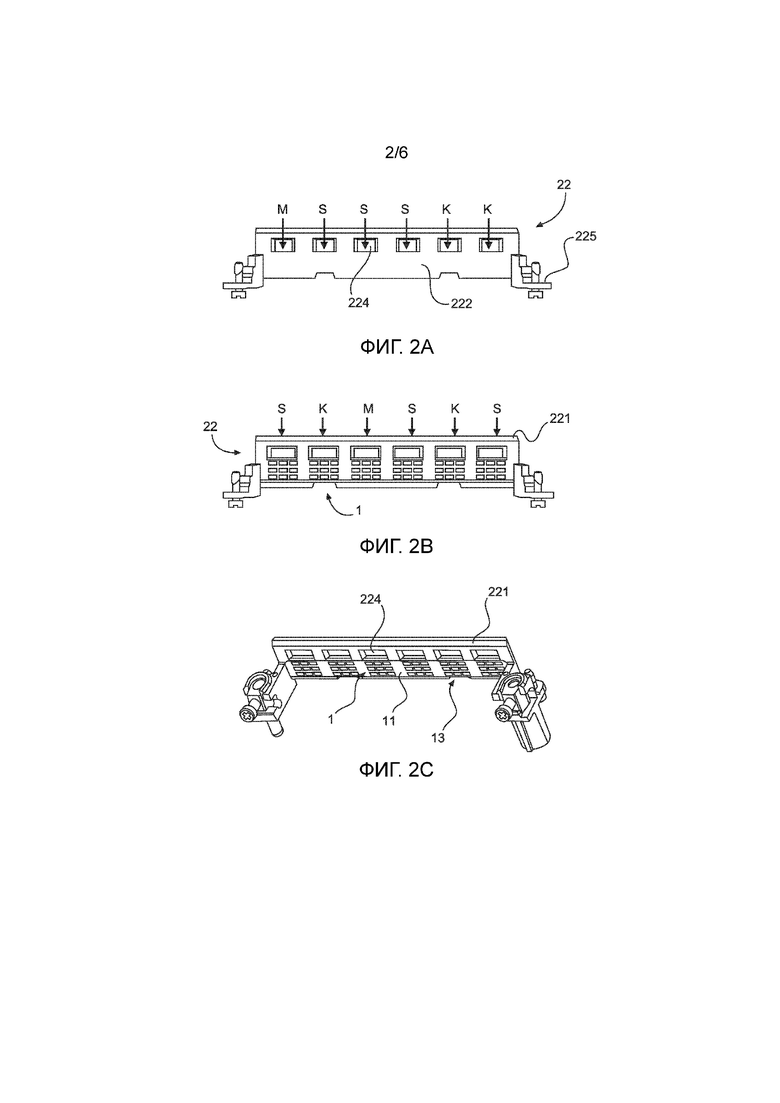
На фиг.2 показана модульная рама 22 штекерного соединителя или по меньшей мере ее части, причем эта модульная рама 22 на фиг.2a и 2b должна комплектоваться модулями, а именно, одним главным модулем M, тремя подчиненными модулями S и двумя обычными (т.е. «стандартными») модулями K. При этом применение обычных модулей K имеет большое экономическое значение, в частности, для совместимости с более ранними версиями такой модульной системы штекерного соединителя.
По уровню техники подчиненные модули S должны быть расположены непосредственно друг за другом и непосредственно присоединяться к главному модулю M, то есть в некотором порядке, который указан, напр., на фиг.2a, чтобы контактировать друг с другом и вместе с тем также с главным модулем. Поэтому стандартные модули вынужденно находятся на наружном конце модульной рамы 22 (здесь изображено справа). Но это условие часто ведет к проблемам с ненадлежащей занятостью ответного штекера, в частности, когда этот ответный штекер также имеет подчиненные модули S. Наконец, обычно они соединяются вставлением со стандартными модулями K штекерного соединителя, и поэтому в отношении их положения подвергаются соответствующим ограничениям их собственной модульной системы штекерного соединителя. Таким образом, в уровне техники у известной системы трудно применять главный модуль M штекерного соединителя также для управления подчиненными модулями S ответного штекера, так как они должны находиться на соответственно другом конце модульной рамы. Кроме того, при этом должно учитываться различие модулей «папа» (штыревые контакты) и «мама» (гнезда), в частности, при том условии, что штыревые контакты, как правило, не должны быть проводящими напряжение. При этом. при известных обстоятельствах, также не всегда можно, напр., переставлять подчиненные модули ответного штекера в модульную раму штекерного соединителя.
При этом ограничения, касающиеся занятости отдельных мест вставления модулей, в уровне техники могут приводить к значительным проблемам и к значительным дополнительным издержкам.
В отличие от этого, при этом желательно иметь возможность располагать модули в модульной раме в любой последовательности.
На фиг.2b показана предлагаемая изобретением модульная рама 22 в поперечном сечении с видом на внутреннюю сторону длинной боковой части 221, в которую интегрирована печатная плата 1, имеющая по меньшей мере одну шину данных. Эта шина данных имеет проходящую по длинной боковой части 221 в продольном направлении проводящую дорожку, а именно, особенно хорошо изображенную на фиг.3c проводящую дорожку 14´´´ для передачи данных для передачи электронных данных.
В соответствии с изобретением, благодаря этому модули, которые электрически контактируют с упомянутой проводящей дорожкой 14´´´ для передачи данных, могут располагаться свободно. Одновременно подчиненные модули S могут находиться с главным модулем M во взаимном обмене данными.
На фиг.2c показана соответствующая половина рамы, имеющая упомянутую боковую часть 221 и интегрированную в нее печатную плату 1 с видом на ее переднюю сторону 11 на 3D–виде. Для каждого места вставления модуля на печатной плате 1 предусмотрен набор присоединительных столбиков 13, который изображен на чертеже под окошком 224 боковой части 221.
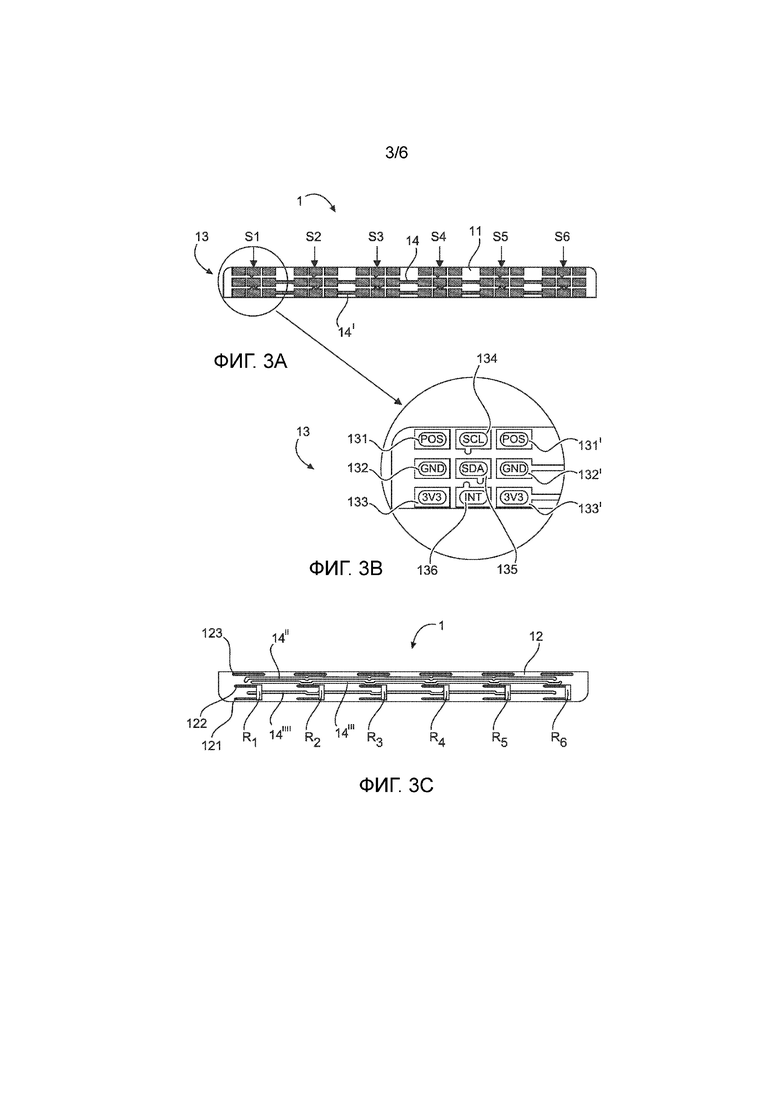
На фиг.3 показана печатная плата 1 с ее присоединительными столбиками 13 и проводящими дорожками 14.
На фиг.3a показана передняя сторона 11 печатной платы 1 с указанием разных мест S1, S2, S3, S4, S5, S6 вставления модулей, имеющих каждое принадлежащий ему набор контактных столбиков 13, из которых на фиг.3b в качестве примера подробно обозначен один набор присоединительных столбиков 13, представляющий все другие.
По два столбика 131, 131´ положения, два столбика 132, 132´ массы и два столбика 133, 133´ электроснабжения соединены друг с другом электропроводящим образом каждый принадлежащим ему, расположенным на задней стороне 12 печатной платы 1 мостиком 121, 122 и 123. При этом они имеются на передней стороне печатной платы 1 в нескольких экземплярах и так могут, например, особенно предпочтительно контактироваться с помощью обратно ориентированных модулей, как описано далее.
Столбики 131, 131´ положения допускают идентификацию каждого места вставления модуля с помощью поясняемой далее кодировки сопротивления. Столбики 132, 132´ массы допускают электропроводящее соединение с определенным потенциалом массы для электроснабжения, который, однако, может использоваться и для других целей применения, напр., в качестве референтного напряжения для сигнала передачи данных.
На фиг.3c показана задняя сторона 12 печатной платы 1, имеющая сплошную проводящую дорожку 14´´´ для передачи данных и соответствующую ей проводящую дорожку 14´´´´ синхронизации, которая предусмотрена для того, чтобы передавать так называемый «сигнал часов» для синхронизации передачи данных.
Печатная плата 1 повернута относительно двух предшествующих изображений на 180° вокруг горизонтальной оси. Поэтому предусмотренный для соединения столбиков 131, 131´ положения мостик 121 на чертеже расположен внизу. Предусмотренный для соединения столбиков 132, 132´ массы мостик 122 находится в середине, а предусмотренный для соединения столбиков 133, 133´ электроснабжения мостик 123 находится в области, изображенной вверху.
Благодаря двум последним названным мостикам 122,123 две другие, предусмотренные для электроснабжения проводящие дорожки 14, 14´ (сравн. фиг.3a) выполнены сплошными. Первая другая проводящая дорожка представляет собой проводящую дорожку 14´ электроснабжения. Вторая другая проводящая дорожка предусмотрена в качестве проводящей дорожки 14 массы и электропроводящим образом соединяет друг с другом столбики 132, 132´ массы разных мест S1, S2, S3, S4, S5, S6 вставления модулей.
В качестве дополнительной сплошной проводящей дорожки предусмотрена проводящая дорожка 14´´ прерывания. Кроме того, на каждом месте S1, S2, S3, S4, S5, S6 вставления модуля для упомянутой кодировки сопротивления электрическое сопротивление R1, R2, R3, R4, R5, R6 включено между столбиком сопротивления и мостиком массы, причем эти электрические сопротивления R1, R2, R3, R4, R5, R6 по своей величине значительно отличаются друг от друга, чтобы таким образом обеспечивать возможность электронной идентификации каждого места вставления модуля.
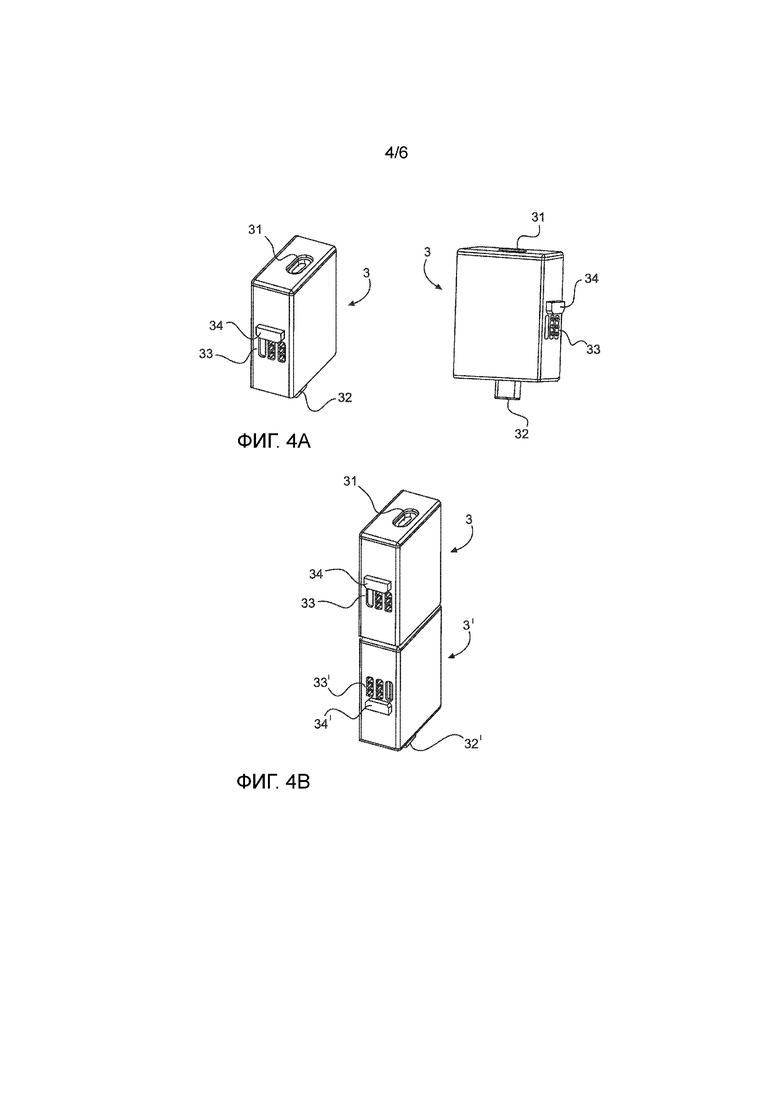
На фиг.4a показан главный модуль 3 на двух разных видах. Главный модуль 3 имеет на двух противоположных друг другу торцевых сторонах уже описанные стопорные выступы 34, из которых на чертеже виден только один. Кроме того, главный модуль 3 имеет со стороны присоединения кабеля USB–гнездо 31, а на противоположной стороне вставления USB–штекер. Со стороны вставления стопорных выступов, то есть на чертеже ниже, изображены шинные контакты 33. При этом можно заметить, что речь идет только о шести шинных контактах, расположенных по три в ряд, но при этом корпус серийно предусматривает другую выемку для такого ряда, то есть всего три ряда.
Это служит для того, чтобы при необходимости применять ту же самую конструктивную форму корпуса также для изображенного на фиг.4b обратно ориентированного модуля.
Этот модуль представляет собой уже упомянутый выше разделительный модуль 3´. Легко различить, что главный модуль 3 своим USB–штекером 32 вставлен в USB–гнездо разделительного модуля 3´. Таким же образом могли бы каскадироваться другие подчиненные модули.
Для этого разделительный модуль должен быть выполнен обратно ориентированным на стороне вставления и присоединения, т.е. шинные контакты 33´ находятся между стопорным выступом 33´(34´?) и не видимым на чертеже USB–гнездом разделительного модуля 3´. Рядом с двумя рядами контактов находится третий, неиспользуемый ряд. Он предусмотрен, чтобы, в зависимости от требования, располагать у определенных подчиненных модулей ряды контактов также на другой стороне, чтобы таким образом выполнять электронику по возможности идентично, чтобы применять по возможности одинаковые электронные конструктивные элементы. Однако у настоящего разделительного модуля 3´ это не является необходимым.
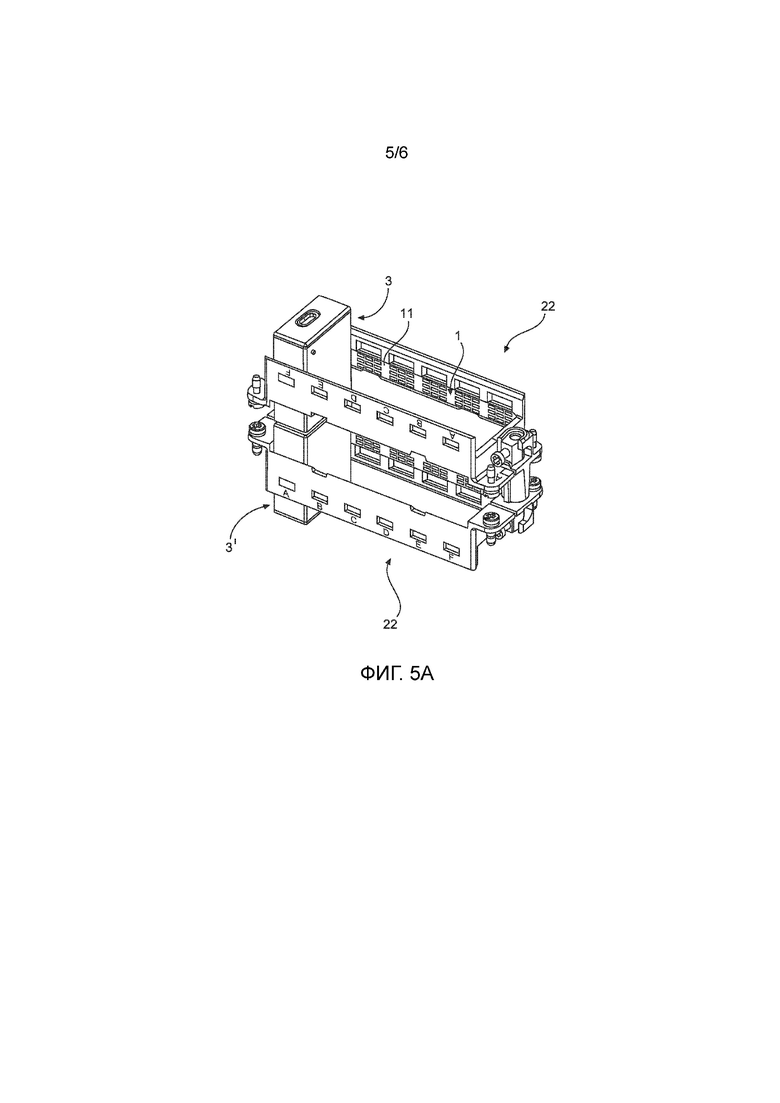
На фиг.5a эти два соединенных друг с другом вставлением главный модуль и модули 3, 3´ изображены вставленными каждый в свою модульную раму 22, причем эти две модульные рамы 22 выполнены одинаково и соединены друг с другом.
Используя предшествующее изображение (сравн. фиг.4b), легко видеть, что первый ряд шинных контактов 33, 33´ контактирует с одними и теми же столбиками 131, 132, 133 соответствующих шинных систем. Если бы шинные контакты 33 разделительного модуля 3´ по условиям конструктивной формы оставили свободным ряд контактов, изображенный слева, и вместо этого использовали контактное отверстие, изображенное справа, как это происходит в случае множества подчиненных модулей, то применялись бы соответственно другие из параллельно включенных пар столбиков 131´, 132´, 133´ данной шинной системы (сравн. фиг.3b). Печатная плата 1 в этом отношении является гибкой вследствие перемыкания нескольких присоединительных столбиков. Одновременно одни и те же модульные рамы 22 могут, независимо от этого, применяться как для штекерного соединителя, так и для ответного штекера.
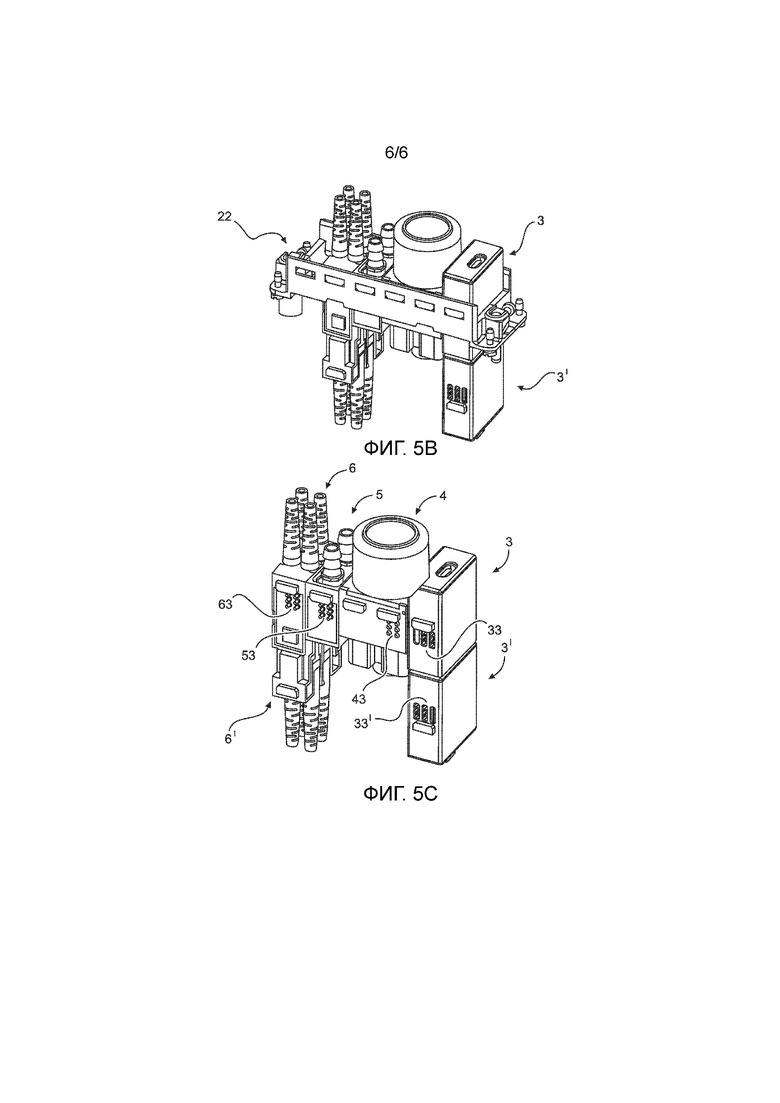
На фиг.5b и 5c показано расположение нескольких модулей 3, 3´, 4, 5, 6, 6´ в модульной системе штекерного соединителя с удерживающей рамой 22 и без.
В качестве модулей здесь находят применение: главный модуль 3, разделительный модуль 3´ для соединения главного модуля 3 с шинной системой не показанной здесь модульной рамы ответного штекера, силовой модуль 4 для измерения передаваемой электрической мощности, пневматический модуль («давления воздуха») 5 для контрольного измерения передаваемого им давления воздуха, а также оптический модуль 6 для измерения рассеянного света для соответствующего анализа ошибок с относящимся к нему стандартным оптическим ответным модулем 6´.
Подчиненные модули 4, 5, 6 своими шинными контактами 43, 53, 63 присоединены к шинной системе печатной платы 1 и через нее, будучи включены параллельно, присоединены к шинным контактам 33 главного модуля 3. Разделительный модуль 3´ своими шинными контактами 33´ присоединен к шинной системе ответного штекера. Главный модуль 3 получает соответствующие данные/сигналы через свой USB–штекер 32´ от вставленного в него разделительного модуля 3´.
Хотя на фигурах разные аспекты или признаки изобретения показаны в каждом случае в комбинации, для специалиста, если не указано иное, очевидно, что изображенные и рассмотренные комбинации не являются единственно возможными. В частности, соответствующие друг другу единицы или комплексы признаков из различных примеров осуществления могут меняться местами друг с другом.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Печатная плата
11 Передняя сторона печатной платы
12 Задняя сторона печатной платы
121 Мостик для столбиков положения
122 Мостик для столбиков массы
123 Мостик для столбиков электроснабжения
13 Набор присоединительных столбиков
131, 131´ Контактные столбики сопротивления
132, 132´ Столбики массы
133, 133´ Столбики электроснабжения
134 Столбик синхронизации (часы)
135 Столбик передачи данных
136 Столбик прерываний
14, 14´, 14´´, 14´´´, 14´´´´ Сплошные проводящие дорожки:
14 Проводящая дорожка массы
14´ Проводящая дорожка электроснабжения
14´´ Проводящая дорожка прерываний
14´´´ Проводящая дорожка передачи данных
14´´´´ Проводящая дорожка синхронизации (часы)
S1, S2, …, S6 Места вставления модулей
R1, R2, …, R6 Разные электрические сопротивления
M Главный модуль
S Подчиненный модуль
K Обычный («стандартный») модуль
2 Штекерный соединитель, имеющий модульную систему штекерного соединителя
21 Корпус штекерного соединителя
211 Крепежные проушины
212 Крепежный фланец
22 Модульная рама, шарнирная рама
221, 222 Боковые части
223 Шарнир
224 Окошко
225 Крепежные концы
226 Крепежные винты
23 Модуль штекерного соединителя
234 Стопорный шип модуля штекерного соединителя
A Продольная ось
3 Главный модуль
3´ Разделительный модуль
31, 31´ USB–гнездо
32, 32´ USB–штекер
33, 33´ Шинные контакты
34, 34´ Стопорные выступы
4 Силовой модуль
43 Шинные контакты силового модуля
5 Пневматический модуль
53 Шинные контакты пневматического модуля
6 Модуль светового волновода
63 Шинные контакты модуля светового волновода
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ ДЛЯ ЗАЩИТЫ ОТ ПЕРЕНАПРЯЖЕНИЙ ДЛЯ МОДУЛЬНОГО ШТЕКЕРНОГО СОЕДИНИТЕЛЯ | 2017 |
|
RU2719766C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ МЕЖДУ УСТРОЙСТВОМ УПРАВЛЕНИЯ И ПОЛЕВЫМИ ПРИБОРАМИ | 2021 |
|
RU2805325C1 |
| ШТЕКЕРНЫЙ БЛОК | 2015 |
|
RU2683239C2 |
| МОДУЛЬНЫЙ ШТЕКЕРНЫЙ СОЕДИНИТЕЛЬ | 2016 |
|
RU2679413C1 |
| ГИДРАВЛИЧЕСКИЙ КЛАПАН | 2016 |
|
RU2633215C2 |
| ИЗМЕРЕНИЕ ТОКА В ИЗОЛЯТОРЕ | 2017 |
|
RU2699762C1 |
| СОЕДИНИТЕЛЬ И УСТРОЙСТВО С ВРЕЗНЫМИ КОНТАКТАМИ ДЛЯ ТЕЛЕКОММУНИКАЦИОННОЙ И ИНФОРМАЦИОННОЙ ТЕХНИКИ | 2006 |
|
RU2391752C2 |
| ШТЕКЕР ДЛЯ ЭКРАНИРОВАННОГО КАБЕЛЯ ПЕРЕДАЧИ ДАННЫХ | 2006 |
|
RU2395880C2 |
| ПЕЧАТНАЯ ПЛАТА ДЛЯ ШТЕКЕРНЫХ РАЗЪЕМОВ | 1995 |
|
RU2150799C1 |
| УСТРОЙСТВО ДЛЯ ШТЕКЕРНОГО СОЕДИНЕНИЯ ПЕЧАТНЫХ ПЛАТ | 2005 |
|
RU2367070C2 |
Изобретение относится к модульным системам штекерного соединителя. Технический результат заключается в обеспечении обратной совместимости шинной системы, предотвращая ошибки передачи и контактирования системы шин данных. Система содержит модульную раму для прямоугольного штекерного соединителя, включающую две противоположные длинные боковые части, шинную систему, включающую в себя шину данных, имеющую одну проходящую по одной из двух длинных боковых частей в продольном направлении проводящую дорожку для электронной передачи данных, расположенный или располагаемый в модульной раме главный модуль, имеющий электрический шинный контакт, несколько расположенных или располагаемых в модульной раме подчиненных модулей, имеющих по одному электрическому шинному контакту, при этом главный модуль и подчиненные модули соединены друг с другом своим соответственно одним шинным контактом электропроводящим образом через указанную проводящую дорожку в виде параллельной схемы. 2 н. и 15 з.п. ф-лы, 13 ил.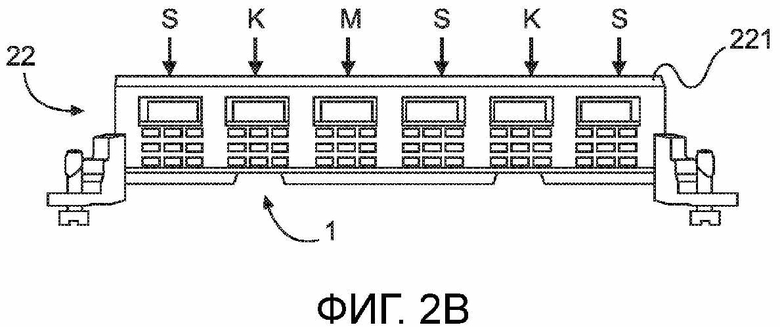
1. Модульная система штекерного соединителя, имеющая следующее:
a) модульную раму (22) для прямоугольного штекерного соединителя, причем модульная рама (22) имеет две противоположные длинные боковые части (221, 222);
b) шинную систему, включающую в себя по меньшей мере одну шину данных, имеющую по меньшей мере одну проходящую по меньшей мере по одной из двух длинных боковых частей в продольном направлении проводящую дорожку (14’’’) для электронной передачи данных;
c) расположенный или располагаемый в модульной раме (22) главный модуль (3), имеющий по меньшей мере один электрический шинный контакт (33) для отправки запросов и для приема ответов через шину данных;
d) несколько расположенных или располагаемых в модульной раме (22) подчиненных модулей (4, 5, 6), имеющих по меньшей мере по одному электрическому шинному контакту (43, 53, 63) для приема запросов от главного модуля (3) и для отправки ответов главному модулю (3);
при этом
e) главный модуль (3) и подчиненные модули (4, 5, 6) соединены друг с другом своим соответственно по меньшей мере одним шинным контактом (43, 53, 63) электропроводящим образом через указанную по меньшей мере одну проводящую дорожку (14’’’) в виде параллельной схемы.
2. Модульная система штекерного соединителя по п.1, при этом подчиненные модули (4, 5, 6) соединены с главным модулем (3) через шину данных с помощью структуры передачи данных в форме точки звезды, при этом главный модуль (3) образует точку звезды.
3. Модульная система штекерного соединителя по одному из пп.1–2, при этом упомянутая в пункте b шина данных имеет по меньшей мере две проводящие дорожки (14’’’, 14’’’’), причем первая из этих проводящих дорожек (14’’’) предусмотрена собственно для передачи данных, а вторая проводящая дорожка (14’’’’) для синхронизации («часы»).
4. Модульная система штекерного соединителя по одному из предыдущих пунктов, при этом шина данных представляет собой так называемую «главную/подчиненную шину».
5. Модульная система штекерного соединителя по одному из предыдущих пунктов, при этом главный модуль (3) имеет электронику для аналитической обработки, имеющую управляющую электронику для регулирования передачи данных на шине данных, чтобы таким образом распознавать расположенные в модульной системе штекерного соединителя подчиненные модули (4, 5, 6), присваивать их идентификационный номер (ID) их соответствующему геометрическому положению в модульной раме (22), а также передавать и присваивать значения измерения от расположенных в подчиненных модулях (4, 5, 6) датчиков соответствующему подчиненному модулю (4, 5, 6) и соответственно обрабатывать их.
6. Модульная система штекерного соединителя по п.5, при этом главный модуль (3) имеет также внешний сетевой интерфейс, чтобы передавать через него во внешнюю сеть по меньшей мере некоторые из значений измерения и/или рассчитанные по ним величины в виде данных измерения.
7. Модульная система штекерного соединителя по одному из предыдущих пунктов, при этом модульная система штекерного соединителя имеет также по меньшей мере две дополнительные проводящие дорожки (14, 14’) для электроснабжения подчиненных модулей (4, 5, 6) и/или главного модуля (3).
8. Модульная система штекерного соединителя по п.7, при этом одна из двух дополнительных проводящих дорожек (14’) при эксплуатации является токоведущей, а другая проводящая дорожка имеет потенциал (14) массы.
9. Модульная система штекерного соединителя по п.8, при этом в положении вставления каждого подчиненного модуля (4, 5, 6) расположено по электрическому сопротивлению (R1, R2, R3, R4, R5, R6), включенному между контактным столбиком (131, 131’) сопротивления и проводящей потенциал массы другой проводящей дорожкой (14), причем эти электрические сопротивления (R1, R2, R3, R4, R5, R6) значительно отличаются друг от друга, чтобы обеспечивать возможность электронной идентификации положения вставления соответствующего подчиненного модуля (4, 5, 6).
10. Модульная система штекерного соединителя по одному из предыдущих пунктов, при этом модульная система штекерного соединителя имеет, кроме того, по меньшей мере одну дополнительную проводящую дорожку (14’’) в качестве линии прерываний, чтобы обеспечить возможность каждому подчиненному модулю (4, 5, 6) наиболее быстрым и активным образом указывать главному модулю (3) на наличие состояния ошибки.
11. Модульная система штекерного соединителя по одному из предыдущих пунктов, при этом упомянутые проводящие дорожки (14, 14’, 14’’, 14’’’, 14’’’’) интегрированы по меньшей мере в одну печатную плату (1), при этом указанная по меньшей мере одна печатная плата (1) установлена в или на одной из двух или обеих длинных боковых частях (221) внутри модульной рамы (2), при этом каждая из упомянутых проводящих дорожек (14, 14’, 14’’, 14’’’, 14’’’’) для контактирования с шинными контактами (33, 33´, 43, 53, 63) как подчиненных модулей (4, 5, 6), так и главного модуля (3) имеет по меньшей мере по одному контактному столбику (131, 131’, 132, 132’, 133, 133’, 134, 135, 136) и/или области контактирования.
12. Модульная система штекерного соединителя по п.11, при этом печатная плата (1) расположена с геометрическим замыканием в выемке соответствующей боковой части (221).
13. Способ измерения для измерения измеряемой величины по меньшей мере в одном подчиненном модуле (4, 5, 6) модульной системы штекерного соединителя и для передачи соответствующих данных измерения от подчиненного модуля (4, 5, 6) к главному модулю (3) модульной системы штекерного соединителя, имеющий следующие этапы:
A) главный модуль (3) адресуется к нескольким подчиненным модулям (4, 5, 6) в соответствии с положением вставления соответствующего подчиненного модуля (4, 5, 6) в модульной раме (22);
B) главный модуль (3) через шину данных требует от подчиненных модулей (4, 5, 6) соответственно метку;
C) подчиненные модули (4, 5, 6) передают свою соответствующую метку через шину данных главному модулю (3);
D) главный модуль (3) распознает вид соответствующего подчиненного модуля (4, 5, 6) по его метке;
E) главный модуль (3) загружает соответственно подходящую к виду подчиненного модуля (4, 5, 6) программу программного обеспечения из внешнего источника;
F) главный модуль (3) запоминает программы программного обеспечения в комбинированной памяти программ/данных;
G) главный модуль (3) обеспечивает выполнение соответствующих программ программного обеспечения с помощью принадлежащего главному модулю (3) микропроцессора, при этом он передает подчиненному модулю (4, 5, 6) отдельные указания через шину данных;
– G1) главный модуль (3) обеспечивает выполнение своим микропроцессором по меньшей мере одной программы программного обеспечения, которая дает команду по меньшей мере одному из подчиненных модулей (4, 5, 6) измерять по меньшей мере одну измеряемую величину и сохранять соответствующие данные измерения;
H) главный модуль (3) через шину данных запрашивает у соответствующего подчиненного модуля (4, 5, 6) данные измерения;
I) соответствующий подчиненный модуль (4, 5, 6) отправляет главному модулю (3) запрошенные данные измерения;
J) главный модуль (3) запоминает данные измерения, как относящиеся к указанному подчиненному модулю (4, 5, 6), в комбинированной памяти программ/данных.
14. Способ измерения по п.13, при этом этап A имеет следующие подэтапы:
A1) подчиненные модули (4, 5, 6) своими шинными контактами (43, 53, 63) контактируют соответственно с одним расположенным в их соответствующем положении вставления электрическим сопротивлением (R1, R2, R3, R4, R5, R6), при этом электрические сопротивления (R1, R2, R3, R4, R5, R6) разных положений вставления значительно отличаются друг от друга;
A2) соответствующий подчиненный модуль (4, 5, 6) измеряет расположенное в его положении вставления электрическое сопротивление (R1, R2, R3, R4, R5, R6);
A3) главный модуль (3) через шину данных запрашивает у каждого подчиненного модуля (4, 5, 6) соответствующее значение измерения;
A4) главный модуль (3) присваивает подчиненным модулям (4, 5, 6) идентификационный номер (ID), соответствующий положению вставления каждого из них;
A5) главный модуль (3) запоминает идентификационный номер (ID), как принадлежащий соответствующему подчиненному модулю (4, 5, 6), в своей комбинированной памяти программ/данных.
15. Способ измерения по одному из пп.13–14, при этом главный модуль (3) посредством заложенного в его комбинированной памяти программ/данных протокола данных и своего микропроцессора управляет потоком передачи данных на шине данных следующим образом:
– главный модуль (3) через шину данных отправляет запрос соответственно одному из подчиненных модулей (4, 5, 6) и различимым образом заканчивает запрос;
– после этого запрошенный подчиненный модуль (4, 5, 6) через шину данных отправляет ответ главному модулю (3), в то время как все другие подчиненные модули (4, 5, 6) молчат.
16. Способ измерения по одному из пп.13–15, при этом упомянутый в пункте E внешний источник представляет собой внешнюю сеть, причем внешняя сеть поддерживает связь с подчиненными модулями (4, 5, 6) следующим образом:
– главный модуль (3) получает от внешней сети для каждого подчиненного модуля (4, 5, 6) внешний идентификационный номер;
– главный модуль (3) запоминает этот внешний идентификационный номер, как принадлежащий соответствующему подчиненному модулю (4, 5, 6), в своей комбинированной памяти программ/данных;
– внешняя сеть через внешний идентификационный номер поддерживает связь с программным обеспечением соответствующего подчиненного модуля (4, 5, 6), при этом
– главный модуль (3) имитирует внешнюю сеть по отношению к подчиненному модулю (4, 5, 6), в то время как физический обмен данными фактически происходит между внешней сетью и главным модулем (3).
17. Способ измерения по одному из пп.13–16, причем этот способ при возникновении состояния ошибки предусматривает следующие этапы:
– датчик подчиненного модуля (4, 5, 6) создает так называемое «прерывание» и закладывает связанную с ним информацию в предусмотренный для этого регистр сервиса прерываний;
– прерывание в виде электрического сигнала тревоги через предусмотренную специально для этого линию прерываний отправляется главному модулю (3);
– выполняемая главным модулем (3) именно в этот момент времени программа программного обеспечения благодаря этому наиболее быстрым возможным образом временно прерывается, и главный модуль (3) вместо этого выполняет сначала так называемую «алгоритм сервиса прерывания» (ISR, Interrupt–Service–Routine);
– в ISR главный модуль (3) через шину данных запрашивает регистр сервиса прерываний всех подчиненных модулей (4, 5, 6);
– таким образом главный модуль (3) находит неисправный подчиненный модуль (4, 5, 6) и узнает из регистра сервиса прерываний дальнейшую информацию о состоянии ошибки;
– главный модуль (3) в соответствии с его программой программного обеспечения предпринимает предусмотренные для соответствующего состояния ошибки дальнейшие шаги.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| ЭЛЕКТРИЧЕСКИЙ ШТЕКЕРНЫЙ РАЗЪЕМ СО СТОПОРНЫМ ПРИСПОСОБЛЕНИЕМ | 1999 |
|
RU2231185C2 |

