Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к анализу и обнаружению тканей тела с помощью ядерного магнитного резонанса (ЯМР).
Предпосылки к созданию настоящего изобретения
Ядерный магнитный резонанс представляет собой неинвазивный способ, который применяют в целях магнитно-резонансной томографии (МРТ). Его эффективно применяют в радионуклидной диагностике из-за его способности различать разные виды тканей на основании разных откликов воды в ткани на последовательные ВЧ-импульсы. В частности, контрастные области на MP-изображениях образуются в результате разности времени релаксации ткани после ВЧ-возбуждения, а именно Т1 и Т2.
В документе US 2015/0018638 раскрываются методы неинвазивного измерения параметров крови с помощью методов ЯМР-релаксации (ядра), выполняемых с использованием относительно низкого постоянного магнитного поля с индукцией в диапазоне 0,15-0,5 Тл. На живую ткань, помещенную в магнитное поле, воздействуют множеством последовательностей импульсов электромагнитного возбуждения с относительно низкими частотами и с помощью множества сигналов ядерного спинового эха, полученных от ткани в ответ на действующие последовательности импульсов возбуждения, определяют связанные с кровью параметры исследуемого субъекта, как следствие способствуя повышению точности полученных сигналов и по существу уменьшая продолжительность процесса.
Устройство, описанное в документе US 2015/0018638, по сути представляет собой установку ЯМР меньшего размера, предназначенную для определения параметров не всего тела, а только одной конечности пациента, для чего конечность необходимо поместить в камеру, вокруг которой установлена пара постоянных магнитов.
В документе US 20050040823 раскрывается ЯМР-зонд производства компании Dune Medical Devices Ltd., Кесария, Израиль. По меньшей мере один магнит возбуждает постоянное стационарное поле поляризации В0 в анализируемом материале и токопроводниках, образующих контур ВЧ-колебаний для возбуждения импульсного радиочастотного магнитного поля возбуждения В1, которое накладывается на поле поляризации N0 в материале. Проводники в контуре возбуждают смежные поля возбуждения, которые находятся друг от друга на расстоянии, создающем в анализируемом материале определенную глубину проникновения, и эха которого образуют результаты измерения, описывающие анализируемый материал. Во время эксплуатации хирург использует на образце зонд, и посредством частнотно-избирательной поверхности (FFS) определяет мельчайшие отличия в биоэлектрических свойствах, что позволяет ему точно зафиксировать форму электромагнитной волны ткани (здоровой или опухолевой).
Профилирование по глубине также описано в документе Blumich В. et al: "Mobile single-sided NMR", Progress in Nuclear Magnetic Resonance Spectroscopy, Pergamon Press, Oxford, GB, vol. 52, no. 4, 1 May 2008, стр. 197 - 269, XP 022589395. В этой публикации также описано применение изображений для параметров Т1 и Т2 в целях установления различия между мышечной тканью, костью и костным мозгом.
В документе US 2007/222433 описывается массив датчиков, установленный на корпусе зонда, дистальную часть которого можно ввести через отверстие с минимально возможным размером для инвазивного вмешательства в целях ЯМР-картирования тканей тела.
Также упоминается статья под названием "NMR Properties of Human Median Nerve at 3 T: Proton Density, T1, T2, and Magnetization Transfer" из журнала о магнитно-резонансной томографии 29: 982-986 (2009) под авторством Giulio Gambarota et al. В этой статье описано измерение связанных с МРТ свойств, таких как протонная плотность (PD), время релаксации Т1 и Т2 и перенос намагниченности (МТ) в срединном нерве человека при напряженности 3 Тл для установления отличия между нервной мышечной тканью. Авторы делают вывод, что установление отличия между нервной и мышечной тканью срединного нерва является сложной задачей.
Существует необходимость в портативном зонде, позволяющем определять в режиме реального времени во время хирургической операции вид ткани. Такой зонд должен обеспечивать возможность устанавливать различие между тканями тела, такими как, с одной стороны, мышцы, сухожилия и т.п., которые можно безопасно разрезать во время хирургической операции ввиду их последующего заживления, и, с другой стороны, нервы, которые должны остаться неповрежденными во время хирургической операции, поскольку их непреднамеренное повреждение может быть необратимым. В уровне техники не было предложено решение этой задачи.
Краткое раскрытие настоящего изобретения
Таким образом, целью настоящего изобретения является предоставление портативного зонда для определения в режиме реального времени во время хирургической операции вида ткани.
Эта цель достигается за счет системы и зонда в соответствии с настоящим изобретением, признаки которых приведены в соответствующих независимых пунктах формулы изобретения.
Система в соответствии с настоящим изобретением предназначена для установления различия между нервной тканью и другими видами ткани, например мышечной и т.п., на основании записи и анализа кривых релаксации Т1 и Т2. С этой целью система содержит зонд, содержащий постоянный магнит и РЧ-катушку, создающую на поверхности зонда магнитное поле в диапазоне 0,05-0,5 Тл. Зонд размещают на ткани и записывают полные кривые релаксации Т1 и Т2, а также коэффициенты переноса намагниченности. Данные кривой релаксации позволяют устанавливать различие между мышечной и нервной тканью в режиме реального времени, что невозможно при использовании томографии. В частности, наилучшее соответствие кривых релаксации соответствующим одно- и многоэкспоненциальным функциям для Т1 и Т2 соответственно определяют с использованием статистической обработки. Полученные в результате временные постоянные и весовые коэффициенты для различных экспонент затем анализируют на основании постоянно пополняющейся базы данных, накапливаемых в ходе текущей эксплуатации, и новейших алгоритмов кластеризации.
Краткое описание фигур
Для более полного понимания настоящего изобретения варианты его применения на практике будут описаны далее исключительно в качестве примера и со ссылками на сопутствующие фигуры, на которых:
на фиг. 1 показана принципиальная блок-схема, демонстрирующая функциональные возможности системы в соответствии с настоящим изобретением;
на фиг. 2а, 2b и 2 с представлены графические изображения, используемые при объяснении принципа работы системы;
на фиг. 3 показано изображение зонда, используемого в системе, показанной на фиг. 1;
на фиг. 4 показан детальный вид источника магнитного поля зонда, показанного на фиг. 2; и
на фиг. 5a-5f показаны схематические изображения источников магнитного поля с разными геометрическими формами.
Подробное раскрытие вариантов осуществления
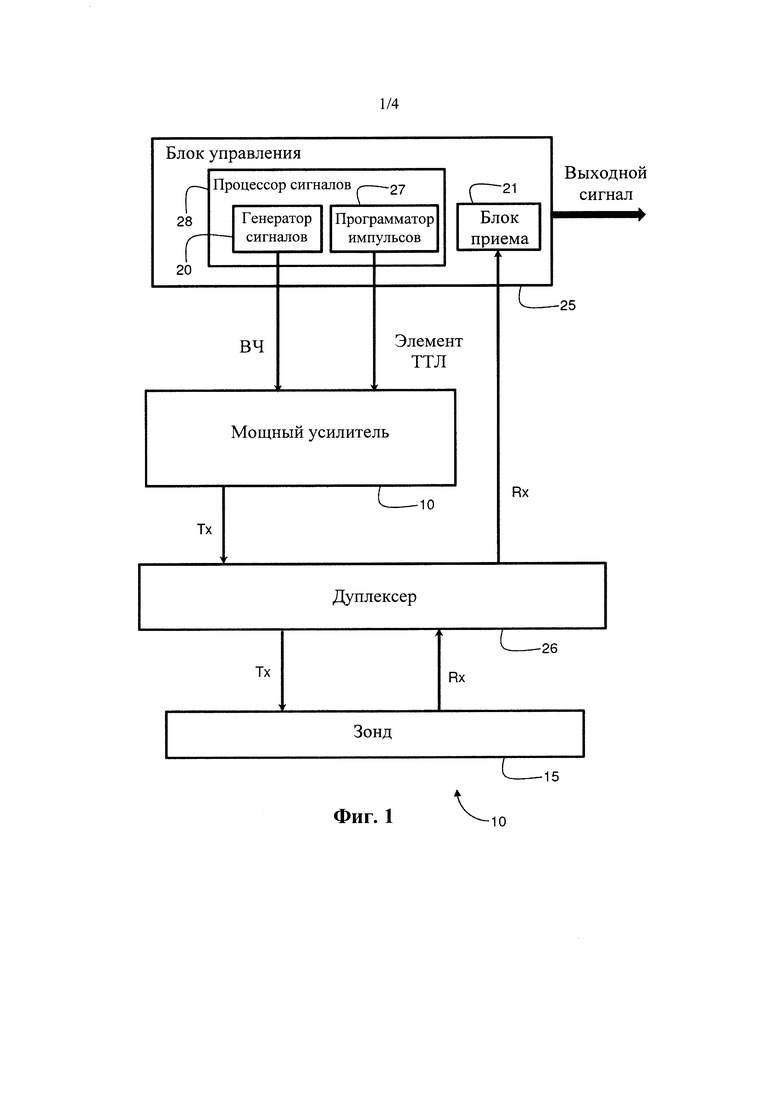
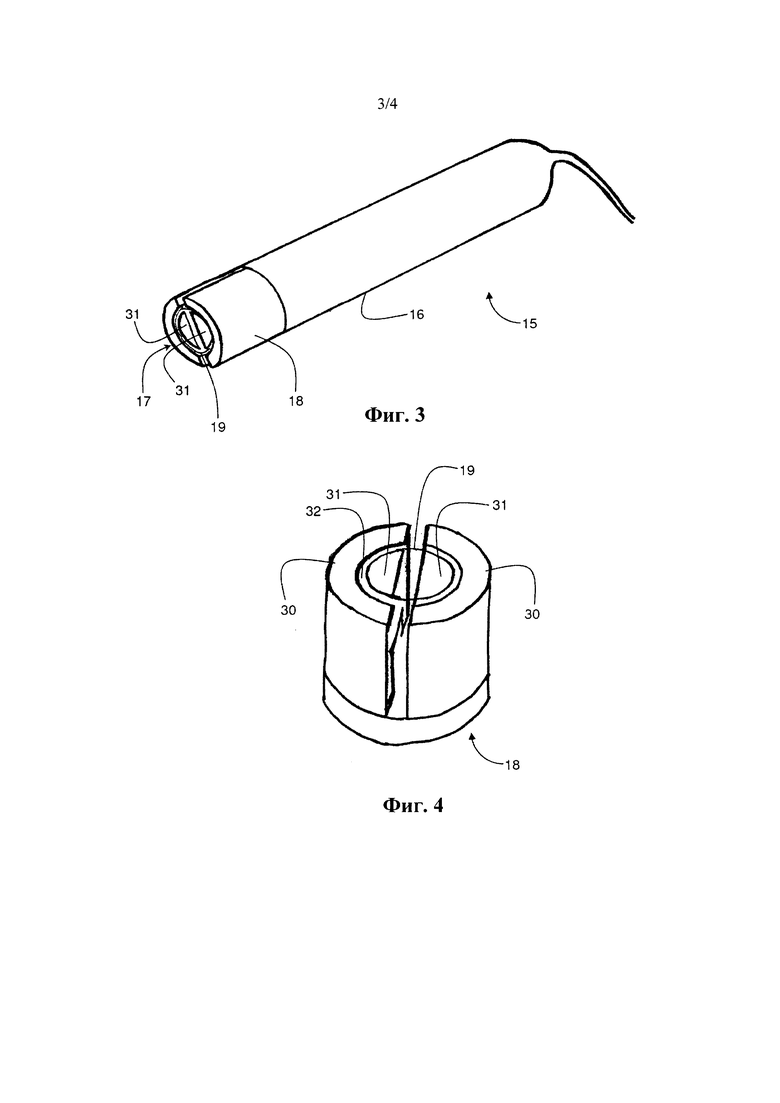
На фиг. 1 показана принципиальная блок-схема, демонстрирующая функциональные возможности системы 10 в соответствии с настоящим изобретением для неинвазивного анализа ткани исследуемого субъекта, предназначенной для установления различия между разными видами ткани. Система 10 содержит ручной зонд 15, условно показанный на фиг. 3 и 4, который содержит корпус 16, выполненный из неферромагнитного материала, и рабочий конец 17 которого характеризуется заданным поперечным сечением. Источник 18 магнитного поля, расположенный внутри корпуса, выполнен с возможностью возбуждения по существу однородного неизменяемого во времени магнитного поля в пределах объема ткани, характеризующегося поперечным сечением, равным поперечному сечению корпуса на рабочем конце 17, и характеризующегося напряженностью магнитного поля в диапазоне 0,05-0,5 Тл. Внутри источника 18 магнитного поля расположена по меньшей мере одна катушка 19 индуктивности, выполненная с возможностью приема сигналов ВЧ-возбуждения в конкретном диапазоне частот, как правило, составляющем 2-20 МГц, причем частота возбуждения связана с напряженностью магнитного поля следующим образом: на каждую единицу тесла напряженности магнитного поля величина частоты сигнала ВЧ-возбуждения составляет 42 МГц. В ответ на магнитное поле и сигналы ВЧ-возбуждения катушка индуктивности генерирует сигналы электромагнитного возбуждения в направлении, по существу перпендикулярном направлению линий магнитного поля, чтобы, таким образом, намагнитить срез живой ткани. Срез характеризуется глубиной и толщиной, которые представляют собой заданную функцию напряженности магнитного поля, в силу чего только живая ткань в таким способом возбужденном срезе генерирует электромагнитный отклик на сигналы ядерного спинового эха.
Генератор 20 сигналов соединен с катушкой 19 индуктивности и выполнен с возможностью генерирования частоты ВЧ-возбуждения, представляющей функцию соответствующего электромагнитного отклика среза ткани, возбужденного зондом 10. Аналогично блок 21 приема соединен с катушкой 19 индуктивности и выполнен с возможностью приема от нее электромагнитного отклика и генерирования характеризующих его данных измерения. Блок 25 управления соединен с генератором 20 сигналов или содержит его для генерирования заданных временных шаблонов сигналов ВЧ-возбуждения, причем блок 25 управления также соединен с блоком 21 приема и в ответ на электромагнитный отклик обрабатывает данные измерения и получает от живой ткани данные, характеризующие сигналы ядерного спинового эха, для определения времени релаксации и определения на их основании вида ткани, возбужденной зондом.
В некоторых вариантах осуществления катушка 19 индуктивности обычно соединена с генератором 20 сигналов и блоком 21 приема посредством дуплексера 26, вследствие чего по меньшей мере одна катушка индуктивности генерирует частоту ВЧ-возбуждения и принимает отклик в различные интервалы времени.
Согласно некоторым вариантам осуществления поперечное сечение на рабочем конце 17 корпуса 16 является цилиндрическим, а его диаметр составляет 2-30 мм. В прототипе, уменьшенном для применения на практике, диаметр корпуса 16 на рабочем конце 17 составлял 20 мм, что позволило провести анализ ткани на глубине в диапазоне 3,2-9,5 мм при напряженности магнитного поля В0, составляющей 42-62 мТл.
Для возбуждения и приема сигналов отклика от множества срезов на последовательных значениях глубины ткани тела можно использовать два разных подхода, которые могут взаимно дополнять друг друга или использоваться в комбинации. Оба подхода основаны на генерировании и подаче посредством зонда 15 сигналов с разной частотой, каждая из которых подходит для намагничивания различных срезов ткани, глубина и толщина которых представляет собой заданную функцию напряженности магнитного поля. Согласно одному подходу предлагается использовать несколько катушек индуктивности, каждая из которых выполнена с возможностью приема соответствующих сигналов ВЧ-возбуждения в различных, но взаимодополняющих диапазонах частот, вследствие чего различные срезы ткани возбуждаются одновременно. Согласно другому подходу генератор 20 сигналов генерирует переменные во времени сигналы возбуждения, которые последовательно подаются на одну и ту же катушку индуктивности. Аналогичным образом, хотя на фиг. 1 одна катушка индуктивности используется как для подачи сигнала возбуждения, так и для приема сигнала отклика, дуплексер 26 предназначен для соответствующего направления потока сигналов, причем альтернативно может использоваться множество катушек индуктивности: одна для передачи и одна для приема, что, таким образом, исключает необходимость в использовании дуплексера 26. Согласно любому из подходов, блок 25 управления содержит программатор 27 импульсов, соединенный с генератором 20 сигналов для получения соответствующих переменных во времени сигналов возбуждения, как описано ниже со ссылкой на фиг. 2а-2с. Генератор 20 сигналов и программатор 27 импульсов вместе составляют процессор 28 сигналов.
На фиг. 3 и 4 показан вариант осуществления источника 18 магнитного поля, который содержит пару внешних дугообразных участков 30, каждый из которых характеризуется первой магнитной полярностью, и пару внутренних участков 31, каждый из которых характеризуется второй магнитной полярностью, противоположной первой магнитной полярности, которые образуют кольцевой зазор 32. По меньшей мере одна катушка 19 индуктивности расположена в кольцевом зазоре 32 между внешними и внутренними участками. Внешние и внутренние участки 30, 31 характеризуются наличием соответствующих контуров, расположенных на окружностях с разными радиусами, причем радиус внешних участков предпочтительно составляет менее 10 мм. Внутренние участки 31 могут быть ниже, чем внешние участки 30, причем в этом случае они могут поддерживаться таким образом, что соответствующие торцевые поверхности внутренних и внешних участков лежат в одной плоскости. В варианте с множеством катушек они могут быть расположены друг над другом в кольцевом зазоре 32 между внутренними и внешними участками.
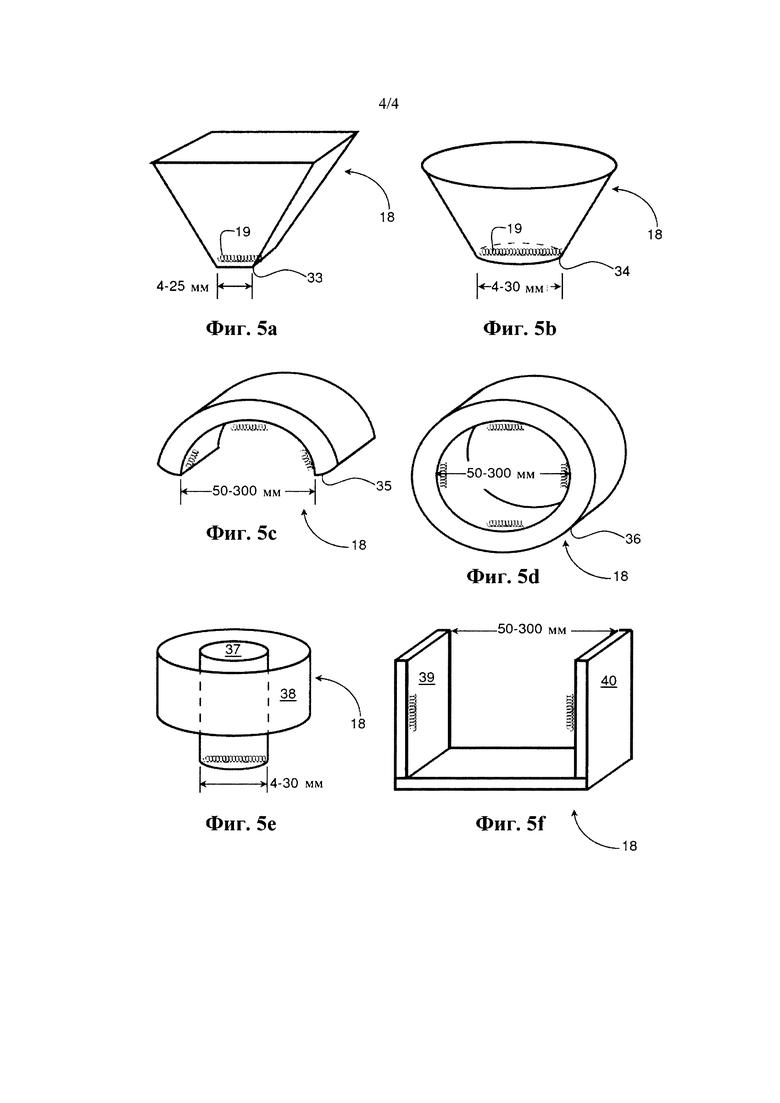
На фиг. 5a-5f показаны схематические изображения источников 18 магнитного поля с разными геометрическими формами. В любом из вариантов одна или более катушек установлена на рабочем конце источника 18 магнитного поля, который удерживается напротив ткани пациента, или, в некоторых случаях, в который вводят ткань пациента. Таким образом, на фиг.5а показан источник 18 магнитного поля в целом пирамидальной формы с вершиной 33 с размером в диапазоне 4-25 мм, причем на вершине 33 расположена катушка 19. На фиг. 5b показан источник 18 магнитного поля конической формы с катушкой 19, расположенной на усеченном конце 34 с диаметром в диапазоне 4-30 мм. Любой из этих источников 18 магнитного поля устанавливается вместо головки зонда, показанного на фиг. 3. На фиг. 5с показан источник 18 магнитного поля, характеризующийся в целом изогнутой формой 35, в центре и на противоположных концах которой расположены соответствующие катушки 19. Расстояние от одного конца до другого находится в диапазоне 50-300 мм. На фиг. 5d показан источник 18 магнитного поля, характеризующийся общей формой полого тороида 36, вдоль внутренних поверхностей которого расположены соответствующие катушки 19, причем показаны четыре такие катушки, каждая из которых находится на противоположном конце взаимно перпендикулярных внутренних диаметров тороиода с размерами в диапазоне 50-300 мм. На фиг. 5е показан источник 18 магнитного поля, содержащий внутренний и внешний цилиндры 37 и 38 соответственно, причем катушка 19 установлена на конце внутреннего цилиндра 37 с диаметром в диапазоне 4-30 мм. На фиг. 5f показан источник 18 магнитного поля, содержащий противоположные боковые стенки 39 и 40, разнесенные на расстояние в диапазоне 50-300 мм, на каждой из которых размещены катушки 19 и между которыми можно ввести конечность пациента. Во всех случаях для наглядности показана одна катушка 19, но следует понимать, что на практике можно использовать множество катушек.
В системе 10 может использоваться множество зондов 15, каждый из которых предназначен для возбуждения разных частей ткани тела.
После описания элементов системы 10 и зонда 15 далее будет вкратце описан способ измерения и анализа, осуществляемый блоком 25 управления, с конкретной ссылкой на фиг. 2а-2с.
Согласно одному варианту осуществления настоящего изобретения блок 25 управления выполнен с возможностью осуществления в режиме реального времени выборки заданных данных, характеризующих множество групп кривых релаксации, причем каждая группа образует по меньшей мере две характеристические кривые, соответствующие специфичному известному виду ткани и экспоненциально спадающие при соответствующих заданных временных постоянных Т1 и Т2, а также анализа данных измерения в режиме реального времени для определения того, какой группе кривых релаксации лучше всего соответствуют данные измерения, для идентификации вида ткани, соответствующего данным измерения.
Под отклонением временных постоянных Т1 и Т2, описанных ниже, следует понимать, что характеристические кривые имеют разные временные постоянные Т1 и Т2, которые характерны для специфичного вида ткани тела. Кривые релаксации для каждого из разных видов ткани тела определяются независимо друг от друга, причем данные, характерные для временных постоянных Т1 и Т2, хранятся в памяти блока 25 управления и подвергаются статистической обработке. Во время фактического измерения определяют наилучшее соответствие сигналов отклика, возвращающихся от каждого среза ткани к зонду, подходящей экспоненциальной функции, результатом чего является оценка временной постоянной, вследствие чего можно установить, какой вид ткани соответствует временной постоянной, полученной путем определения соответствия для измеряемого среза.
Следует отметить, что одновременное сопоставление двух или более кривых релаксации, каждая из которых характеризуется заданными временными постоянными, которые хранятся в памяти блока 25 управления, ускоряет нахождение сходимости в процессе определения наилучшего соответствия. По этой причине существует большое количество областей хирургического вмешательства, в которых важно использовать две или более кривых релаксации. Во многих из таких процедур время является жизненно важным фактором, поэтому использование двух или более кривых релаксации позволяет определить вид ткани менее, чем за 5 секунд. Но существуют области применения, в которых значение времени менее критично. Например, зонд можно использовать в процедурах неинвазивной диагностики, в которых специалист по диагностике может позволить себе подождать значительно дольше, даже минуту или более. В таких областях применения может быть не так важно определять наилучшее соответствие измеренного отклика для обеих кривых, а также может использоваться характеристика Т1 сама по себе, поскольку, хотя она медленнее, чем сопоставление с характеристикой Т2, последней может быть недостаточно для идентификации вида ткани, хотя Т2 сама по себе быстрее.
А. Измерение Т1 путем инверсии импульсов
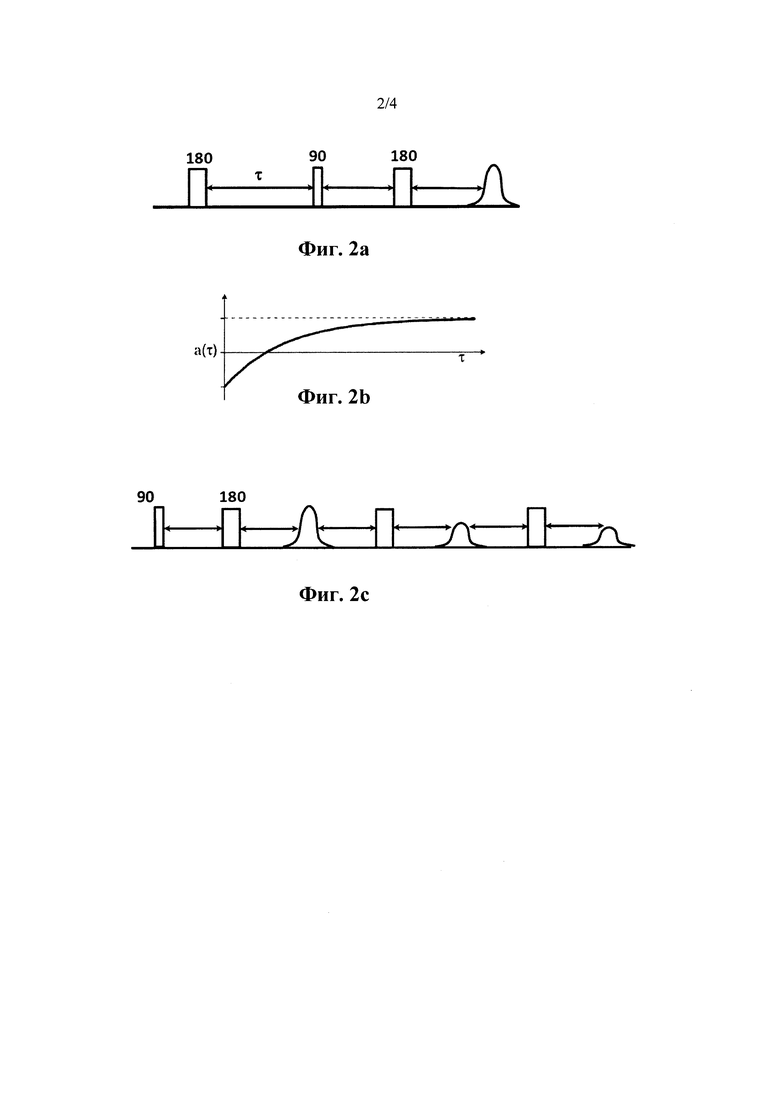
Целью измерения является количественное измерение времени спиновой релаксации Т1 материала. В начале измерения, перед подачей импульсов, система находится в состоянии теплового равновесия, в котором вектор намагниченности совпадает с направлением линий внешнего магнитного поля, обозначенного как В0. Первый импульс предназначен для смены направления вектора намагниченности таким образом, чтобы он совпадал с направлением, противоположным направлению линий магнитного поля. В результате, система стремится вернуться в состояние равновесия, при этом время, за которое система возвращается в состояние равновесия, обозначено как Т1. Назначение второго и третьего импульсов заключается в измерении состояния намагниченности в момент времени t, следующий за первым импульсом. Измерение осуществляют с помощью эхо-сигнала, генерируемого за счет комбинации из импульсов под углом 90° и 180°. За счет повторной подачи этой последовательности импульсов с различными значениями t получают кривую, показанную на фиг. 2, из которой можно вывести временную постоянную Т1.
В. Измерение Т2 при помощи последовательности импульсов под углом 180°
Целью этого измерения является количественное измерение времени затухания сигнала магнитного резонанса, известного как Т2. Это затухание является результатом локальных магнитных полей и спинов в материале, образующих рассеяние в частотах прецессии и вызывающих затухание сигнала. Это измерение можно проводить однократно, без необходимости в ряде операций, с использованием последовательности импульсов, показанной на фиг. 2с. Подходящий алгоритм раскрыт авторами S. Meiboom и D. Gil в документе "Modified spin-echo method for measuring nuclear relaxation times''' Rev. Sci. Instrum. 29, 688 (1958). Эта последовательность начинается с импульса под углом 90°, которые смещает вектор намагниченности перпендикулярно направлению линий внешнего поля. Вектор намагниченности поворачивается (подвергается прецессии) вокруг оси внешнего поля. Чтобы избежать воздействия неоднородности внешнего поля используют импульс под углом 180°, известный как эхо-сигнал, с началом подачи которого исключается рассеяние частоты в результате недостатка однородности внешнего поля, и все спины выравниваются и образуют сильный сигнал. С использованием последовательности импульсов под углом 180° можно сгенерировать последовательность эхо-сигналов, чтобы, таким образом, получить, на основании измерения сигналов в начале эхо-сигнала в течение прохождения эхо-импульсов, кривую затухания, показанную на фиг. 2b, в которой временная постоянная затухания обозначена как Т2.
Блок управления в соответствии с настоящим изобретением может представлять собой подходящим образом запрограммированный компьютер. Аналогично настоящее изобретение предполагает использование компьютерной программы, выполненной с возможностью считывания компьютером для выполнения способа согласно настоящему изобретению. Настоящее изобретение также предполагает использование машиночитаемой памяти, на которой в материальном виде реализована программа, содержащая команды, исполняемые машиной для выполнения способа согласно настоящему изобретению.
Признаки, которые описаны со ссылкой на один или несколько вариантов осуществления, приведены исключительно для примера, а не для ограничения этими вариантами осуществления. Таким образом, если не указано иное, или если очевидно, что конкретные комбинации невозможны, предполагается, что необязательные признаки, которые описаны со ссылкой только на некоторые варианты осуществления, могут аналогичным образом применяться ко всем другим вариантам осуществления.
Группа изобретений относится к анализу и обнаружению тканей тела с помощью ядерного магнитного резонанса (ЯМР). Система для неинвазивного анализа ткани содержит неферромагнитный ручной зонд, выполненный с возможностью установления различия между нервами, мышцами и кровеносными сосудами. Источник магнитного поля в зонде возбуждает однородное неизменяемое во времени магнитное поле в пределах объема ткани и содержит катушку индуктивности, которая принимает сигналы ВЧ-возбуждения в конкретном диапазоне частот, относящемся к напряженности магнитного поля, таким образом генерируя сигналы возбуждения, проходящие перпендикулярно направлению линий магнитного поля, и намагничивая срез живой ткани, характеризующийся глубиной и толщиной, обусловленными напряженностью поля, при этом только живая ткань в каждом срезе генерирует отклик на сигналы ядерного спинового эха. Блок управления генерирует временные шаблоны сигналов возбуждения и получает данные, характеризующие сигналы ядерного спинового эха, от живой ткани, определяет кривые релаксации, характеризующиеся временными постоянными T1, Т2, и выполняет статистическую обработку кривых релаксации для определения вида ткани, возбужденной зондом. Технический результат – портативность зонда для определения в режиме реального времени во время хирургической операции вида ткани. 2 н. и 29 з.п. ф-лы, 5 ил.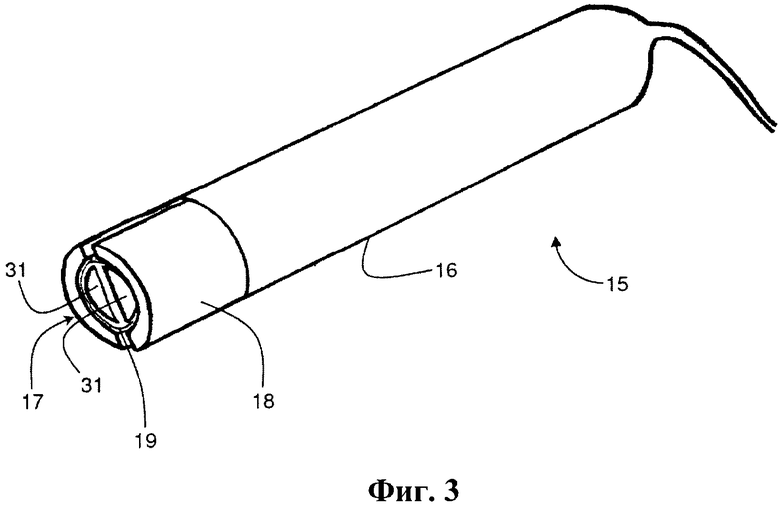
1. Система (10) для неинвазивного анализа ткани исследуемого субъекта для установления различия между разными видами ткани, включая нервы, мышцы и кровеносные сосуды, причем система содержит:
ручной зонд (15), содержащий корпус (16), выполненный из неферромагнитного материала и содержащий рабочий конец (17);
источник (18) магнитного поля, расположенный внутри корпуса и выполненный с возможностью возбуждения по существу однородного неизменяемого во времени магнитного поля в пределах объема ткани, характеризующегося напряженностью магнитного поля в диапазоне 0,02-0,75 Тл в пределах указанного объема ткани; и
по меньшей мере одну катушку (19) индуктивности, расположенную внутри источника магнитного поля и выполненную с возможностью приема сигналов ВЧ-возбуждения в конкретном диапазоне частот, относящемся к напряженности магнитного поля, причем указанная по меньшей мере одна катушка индуктивности в ответ на магнитное поле и сигналы ВЧ-возбуждения генерирует сигналы электромагнитного возбуждения в направлении, по существу перпендикулярном направлению линий указанного магнитного поля, чтобы, таким образом, намагнитить срез живой ткани, причем указанный срез характеризуется глубиной и толщиной, которые представляют собой заданную функцию напряженности магнитного поля, при этом только живая ткань в указанном срезе генерирует электромагнитный отклик на сигналы ядерного спинового эха;
генератор (20) сигналов, соединенный по меньшей мере с одной катушкой индуктивности и выполненный с возможностью генерирования частоты ВЧ-возбуждения, которая представляет собой функцию соответствующего электромагнитного отклика каждого среза;
блок (21) приема, соединенный по меньшей мере с одной катушкой индуктивности и выполненный с возможностью приема от нее электромагнитного отклика и генерирования данных измерения, характеризующих его; и
блок (25) управления, соединенный с генератором сигналов для генерирования заданных временных шаблонов сигналов ВЧ-возбуждения, причем блок управления также соединен с блоком приема и в ответ на электромагнитный отклик обрабатывает данные измерения и получает от живой ткани данные, характеризующие сигналы ядерного спинового эха, для определения кривых релаксации, характеризующихся временными постоянными Т1 и Т2, статистической обработки кривых релаксации для определения на их основании вида ткани, возбужденной зондом;
отличающаяся тем, что:
предусмотрена более чем одна катушка индуктивности, и генератор (20) сигналов выполнен с возможностью подачи на каждую катушку индуктивности соответствующего сигнала ВЧ-возбуждения в различных, но взаимодополняющих диапазонах частот для одновременного возбуждения множества срезов на последовательных значениях глубины ткани тела, и
блок (25) управления в ответ на электромагнитные отклики, принятые от указанного множества срезов, определяет кривые релаксации для каждого среза и определяет на их основании, какой вид ткани возбужден зондом в каждом срезе из группы, состоящей из нервов, мышц и кровеносных сосудов.
2. Система по п. 1, в которой блок управления выполнен с возможностью осуществления в режиме реального времени выборки заданных данных, характеризующих множество групп кривых релаксации, причем каждая группа образует по меньшей мере одну характеристическую кривую, соответствующую специфичному известному виду ткани и экспоненциально спадающую при соответствующей заданной временной постоянной Т2, а также анализа данных измерения в режиме реального времени для определения того, какой группе кривых релаксации лучше всего соответствуют данные измерения, для идентификации вида ткани, соответствующего данным измерения.
3. Система по п. 1 или 2, в которой блок управления выполнен с возможностью осуществления в режиме реального времени выборки заданных данных, характеризующих множество групп кривых релаксации, причем каждая группа образует по меньшей мере две характеристические кривые, соответствующие специфичному известному виду ткани и имеющие заданные временные постоянные Т1 и Т2, а также анализа данных измерения в режиме реального времени для определения того, какой группе кривых релаксации лучше всего соответствуют данные измерения, для идентификации вида ткани, соответствующего данным измерения.
4. Система по п. 2 или 3, в которой блок управления выполнен с возможностью пополнения указанных заданных данных временными постоянными и весовыми коэффициентами для различных экспонент, определенных из данных измерения, для обеспечения анализа последующих измерений на основании постоянно пополняющейся базы данных, накапливаемых в ходе текущей эксплуатации, и, таким образом, уменьшения времени обработки.
5. Система по п. 4, в которой блок управления выполнен с возможностью определения того, какой группе кривых релаксации лучше всего соответствуют данные измерения менее чем через 5 секунд после начала измерения.
6. Система по любому из пп. 2-5, в которой перед применением зонд откалиброван для получения и хранения указанных кривых релаксации.
7. Система по любому из предыдущих пунктов, в которой рабочий конец (17) корпуса (16) имеет цилиндрическое поперечное сечение.
8. Система по п. 7, в которой диаметр рабочего конца корпуса находится в диапазоне 2-30 мм.
9. Система по любому из предыдущих пунктов, в которой частота ВЧ-возбуждения находится в диапазоне 2-20 МГц.
10. Система по любому из пп. 1-9, в которой по меньшей мере одна из указанных катушек (19) индуктивности обычно соединена с генератором (20) сигналов и блоком (21) приема посредством дуплексера (26), вследствие чего по меньшей мере одна катушка индуктивности генерирует частоту ВЧ-возбуждения и принимает отклик в различные интервалы времени.
11. Система по любому из пп. 1-9, содержащая множество катушек индуктивности, причем по меньшей мере одна первая катушка индуктивности соединена с генератором сигналов и по меньшей мере одна вторая катушка индуктивности соединена с блоком приема, причем указанные первая и вторая катушки индуктивности задействуются во время разных интервалов времени для генерирования частоты ВЧ-возбуждения и приема отклика.
12. Система по любому из пп. 1-11, в которой источник (18) магнитного поля содержит пару внешних дугообразных участков (30), каждый из которых характеризуется первой магнитной полярностью, и пару внутренних участков (31), каждый из которых характеризуется второй магнитной полярностью, противоположной первой магнитной полярности, причем по меньшей мере одна катушка индуктивности расположена в кольцевом зазоре (32) между внешними и внутренними участками.
13. Система по п. 12, в которой внешние и внутренние участки характеризуются наличием соответствующих контуров, расположенных на окружностях с разными радиусами.
14. Система по п. 13, в которой соответствующий радиус внешних участков составляет менее 10 мм.
15. Система по любому из пп. 12-14, в которой внутренние участки (31) ниже, чем внешние участки (30), и поддерживаются таким образом, что соответствующие торцевые поверхности внутренних и внешних участков лежат в одной плоскости.
16. Система по любому из предыдущих пунктов, в которой множество катушек расположены друг над другом в кольцевом зазоре между внутренними и внешними участками.
17. Система по любому из предыдущих пунктов, содержащая множество зондов, каждый из которых предназначен для возбуждения разных частей ткани тела.
18. Ручной зонд (15) для неинвазивного анализа ткани исследуемого субъекта для установления различия между разными видами ткани, включая нервы, мышцы и кровеносные сосуды, причем ручной зонд содержит:
корпус (16), выполненный из неферромагнитного материала и содержащий рабочий конец;
источник (18) магнитного поля, расположенный внутри корпуса и выполненный с возможностью возбуждения по существу однородного неизменяемого во времени магнитного поля в пределах объема ткани, характеризующегося напряженностью магнитного поля в диапазоне 0,02-0,75 Тл в пределах указанного объема ткани; и
по меньшей мере одну катушку (19) индуктивности, расположенную внутри источника магнитного поля и выполненную с возможностью приема сигналов ВЧ-возбуждения в конкретном диапазоне частот, относящемся к напряженности магнитного поля, причем указанная по меньшей мере одна катушка индуктивности в ответ на магнитное поле и сигналы ВЧ-возбуждения генерирует сигналы электромагнитного возбуждения в направлении, по существу перпендикулярном направлению линий указанного магнитного поля, чтобы, таким образом, намагнитить срез живой ткани, причем указанный срез характеризуется глубиной и толщиной, которые представляют собой заданную функцию напряженности магнитного поля, при этом только живая ткань в указанном срезе генерирует электромагнитный отклик на сигналы ядерного спинового эха;
причем по меньшей мере одна катушка индуктивности выполнена с возможностью приема частоты ВЧ-возбуждения, которая представляет собой функцию соответствующего электромагнитного отклика каждого среза, и направления частоты ВЧ-возбуждения на ткань тела указанного субъекта; и
причем по меньшей мере одна катушка индуктивности дополнительно выполнена с возможностью приема электромагнитного отклика от ткани тела и передачи электромагнитного отклика на внешний блок для последующего анализа;
отличающийся тем, что:
источник (18) магнитного поля содержит пару внешних дугообразных участков (30), каждый из которых характеризуется первой магнитной полярностью, и пару внутренних участков (31), каждый из которых характеризуется второй магнитной полярностью, противоположной первой магнитной полярности, причем по меньшей мере одна катушка индуктивности расположена в кольцевом зазоре (32) между внешними и внутренними участками.
19. Зонд по п. 18, в котором рабочий конец (17) корпуса (16) имеет цилиндрическое поперечное сечение.
20. Зонд по п. 19, в котором диаметр рабочего конца корпуса находится в диапазоне 3-8 мм.
21. Зонд по любому из пп. 18-20, в котором внешние и внутренние участки характеризуются наличием соответствующих контуров, расположенных на окружностях с разными радиусами.
22. Зонд по п. 21, в котором соответствующий радиус внешних участков составляет менее 10 мм.
23. Зонд по любому из пп. 18-22, в котором внутренние участки (31) ниже, чем внешние участки (30), и поддерживаются таким образом, что соответствующие торцевые поверхности внутренних и внешних участков лежат в одной плоскости.
24. Зонд по любому из пп. 18-23, в котором множество катушек расположены друг над другом в кольцевом зазоре между внутренними и внешними участками.
25. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля имеет в целом пирамидальную форму с вершиной (33), причем по меньшей мере одна катушка (19) расположена на вершине.
26. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля имеет форму усеченного конуса с концом (34), причем по меньшей мере одна катушка (19) расположена на этом конце.
27. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля характеризуется в целом изогнутой формой (35), в центре и на противоположных концах которой расположены соответствующие катушки (19).
28. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля имеет в целом форму полого тороида (36), вдоль внутренних поверхностей которого расположены соответствующие катушки (19).
29. Зонд по п. 28, содержащий по меньшей мере четыре катушки, каждая из которых находится на противоположном конце взаимно перпендикулярных внутренних диаметров тороида.
30. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля содержит внутренний цилиндр (37) и внешний цилиндр (38), причем по меньшей мере одна катушка (19) установлена на конце внутреннего цилиндра (37).
31. Зонд по любому из пп. 18-24, в котором источник (18) магнитного поля содержит противоположные боковые стенки (39, 40), на каждой из которых размещены катушки (19) и которые имеют надлежащие размеры для введения конечности пациента.
| US 2005021019 A1, 27.01.2005 | |||
| WO 2009090609 A1, 23.07.2009 | |||
| US 5390673 A, 21.02.1995 | |||
| МНОГОКАНАЛЬНЫЕ ЭНДОРЕКТАЛЬНЫЕ КАТУШКИ И ИНТЕРФЕЙСНЫЕ УСТРОЙСТВА ДЛЯ НИХ | 2011 |
|
RU2528034C2 |

