Предлагаемая платформа относится к медицинской технике, точнее к платформам с биологической обратной связью, которые применяются для восстановления функций постуральной системы, направленных на вертикализацию тела пациентов.
Известны платформы с визуальной биологической обратной связью, в которых сигналы, замеренные акселерометрами преобразуются в визуальный сигнал, который отображается на экране дисплея. Пациентам при этом предлагаются различные варианты работы с визуальными сигналами, направленными на отслеживание движущихся визуальных картин. К таким платформам относится, например платформа «Стабилон-01-2», описанная в сайте «www.rista.ru». Известны также платформы с акустической обратной связью, в которых по сигналам электроэнцефалограмм, формируется звуковой сигнал, которым воздействуют на пациента, смотри например Патент RU 2192777.
Любая система с биологической обратной связью направлена на формирование устойчивого ответа на формируемый сигнал, визуальный, акустический или сигнал, принимаемый другими постуральными входами. При этом система человек-платформа становится устойчивой только в том случае, если фазовое запаздываниеϕ между реакцией на сигнал и сигналом не превысит 180°. Условие Δϕ=180°-ϕ, определяемое в теории автоматического регулирования как « запас по фазе», может служить критерием эффективности восстановительных процедур с применением кибернетических платформ, оснащенных биологической обратной связью.
Наиболее близким предлагаемому устройству является стабилометрическая платформа «Стабилан-01-2». Это устройство содержит саму платформу и ПЭВМ. Корпус стабилоплатформы состоит из опорной плиты и поддона, соединяющихся между собой посредством датчиков опорных реакций. Пленочные тензодатчики резистивного типа выполнены в периферийных ребрах жесткости опорной плиты и свободными концами опираются на четыре ножки. Влияние неровностей пола при установке стабилоплатформы позволяет исключить одна регулируемая по высоте ±3 мм ножка. Ребра жесткости попарно объединяют датчики и крепятся к опорной плите винтами, прилегая к ней средней (нерабочей) частью. Тензорезисторы покрываются силиконовой пастой для защиты от внешних воздействий. В каждом датчике они объединяются в мостовые схемы, выходы которых подключены к дифференциальным входам усилителей электронного блока. Выход электронного блока соединен с устройством ввода аналоговой информации в ПЭВМ, которое имеет стандартный порт USB. Сигналы с тензодатчиков преобразуются в видеосигналы в ПЭВМ и видеосигналы регистрируются на мониторе компьютера в виде различных меток, за которыми пациенту предлагается следить и устанавливать эти метки, в задаваемое программой, место на экране монитора, путем перемещения центра масс. В процессе такой тренировки у пациента вырабатывается способность более правильно управлять своим центром масс при вертикализации.
Недостатком такой системы является отсутствие объективных численных данных об эффективности восстановительных процедур, которые необходимо получать в реальном масштабе времени. Также, поскольку в системе отсутствует наказание за неправильные движения, эффективность известной кибернетической системы человек-устройство падает. Наказание за неправильную пробу оставляет в памяти пациента эту пробу и в дальнейшем исключает эти пробы из процесса компенсации гравитационных составляющих сил или моментов.
Целью предлагаемого кибернетического устройства является расширение возможностей системы «человек - кибернетическое устройство» при восстановлении постуральной системы за счет введения наказания за неправильные движения и за счет получения в реальном масштабе времени информации о фазовом запаздывании.
Указанная цель в кибернетическом устройстве, содержащем качающуюся платформу с акселерометрами, выходы которых подключены к ПЭВМ, в которой сигналы датчиков преобразуются в визуальные сигналы, которые пациенту предлагается отслеживать, дополнительно оснащается двумя парами нагревательных элементов, например элементов Пельтье. Каждая пара элементов устанавливается в месте размещения стоп пациента, причем один из элементов пары в районе пятки, второй в районе носка. На каждом нагревательном элементе размещен датчик температуры, подключенный к регулятору температуры, который обеспечивает регулировку температуры так, что при наклоне в сторону датчика, на датчике повышается температура по гармоническому закону. Увеличение температуры заставляет пациента совершить отклонение центра масс такое, которое приведет к охлаждению этого нагревателя, но к нагреву нагревателя противоположно установленного. Тем самым кибернетическое устройство наказывает пациента за неправильные движения. Этот процесс можно сравнить с процессом проб и ошибок, которые совершает ребенок в раннем возрасте в процессе обучения вертикальной стойке, когда его падения приводят к болезненным ушибам. Именно боль стимулирует память пациента фиксировать неправильные пробы и в дальнейшем исключать их из арсенала проб и ошибок. Данное утверждение основано на том, что постуральная система, являясь многозвенной и обладающей многими входами, вырабатывает алгоритмы управления вертикализацией в процессе самообучения, причем самообучение ведется методом проб и ошибок. Регулятор температуры управляется сигналами с датчиков угловых перемещений платформы по следующему алгоритму:
- платформа находится в горизонтальном положении: t°=36°С поддерживается на всех элементах.
- платформа наклоняется влево: на левой стопе t°=50°, на правой t°=36°С
- платформа наклоняется вправо: на правой стопе t°=50°, на левой t°=36°
- платформа наклоняется вперед: в носовом элементе t°=50°, в пяточном t°=36°,
- платформа наклоняется назад: в носовом элементе t°=36°, в пяточном t°=50°,
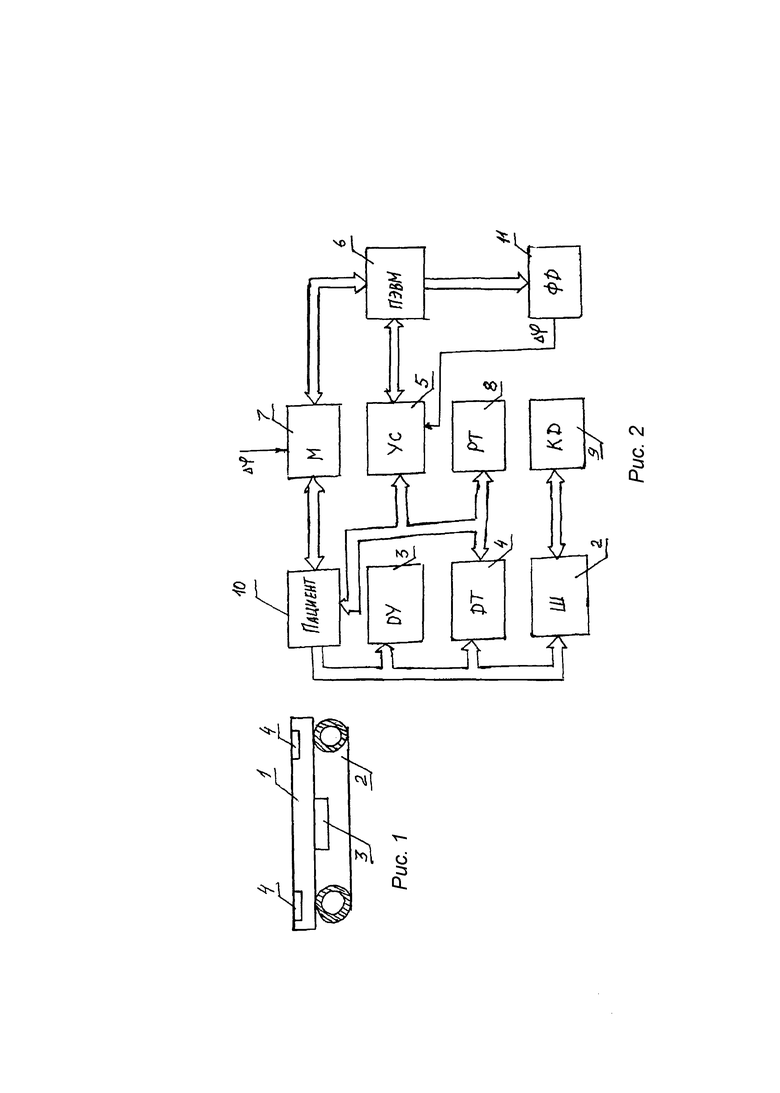
Предложенный алгоритм обеспечивает наказание не комфортной температурой за неправильные пробы в процессе самообучения вертикализации, что соответствует поддержанию платформы в горизонтальном состоянии. При этом дополнительно в компьютере в режиме реального времени фиксируется фазовое запаздывание между сигналами акселерометров и сигналами с датчиков температур на основной частоте колебаний сигналов этих датчиков, полученной разложением в ряд Фурье программой БПФ с помощью фазового детектора. Этот параметр используется медперсоналом для оценки эффективности восстановительного процесса. Чем больше запас по фазе, тем устойчивее система, тем эффективнее восстановительный процесс. Дополнительно платформа оснащается торообразной резиновой шиной, к которой подключен компрессор с регулятором давления в шине. Платформа, установленная на такой шине, является качающейся, но амплитуда и собственная частота качания платформы регулируется давлением в шине так, чтобы частота колебания центра масс пациента была удалена от собственной частоты платформы. На рисунке 1 представлена условно-конструктивная схема платформы.
На рисунке 2 представлена блок схема предлагаемой кибернетической системы- человек- платформа. На рисунке 1 обозначены:
1 - платформа,2 - резиновая шина, 3 - блок угловых датчиков или акселерометров,4 - нагревательные элементы с датчиками температур.
На рисунке 2 обозначены:
- 5 устройство связи аналоговой информации с ПЭВМ 6, 7 - экран или монитор, 8 -регулятор температуры нагревателей, 9 - компрессор с датчиком давлений, 10 - пациент, 11 - фазовый детектор
Общими элементами предложенной платформы и устройства прототипа являются:
- качающаяся платформа с датчиками угловых перемещений,, устройство сопряжения аналоговых сигналов с ПЭВМ и ПЭВМ с экраном, которые обеспечивают визуальную биологическую обратную связь.
- отличительными признаками являются введение дополнительной биологической обратной связи через стопы и введение в компьютер программы, позволяющей определять фазовое запаздывание в биологической обратной связи через стопы ног пациента. Эта обратная связь реализована введением двух пар нагревателей с датчиками температур, установленных на платформе в местах установки стоп и регулятора температуры.
За счет введения отличительных признаков появилась возможность оценки эффективности восстановительных процедур в реальном масштабе времени, а также наказанием за неправильные пробы тепловым воздействием на стопы пациента добиваются запоминания пациентом неправильных проб и их исключения из арсенала проб и ошибок. Тем самым ускоряется процесс восстановления.
Совместно с известными признаками в такой платформе реализованы два канала биологической обратной связи, что приближает кибернетическую систему к системе биологической, обладающей тремя главными входами или экзо входами: зрение, внутреннее ухо и стопы ног.
Данное устройство является эффективным средством в комплексной реабилитации при лечении различных постуральных синдромов. Раннее включение кибернетической платформы в реабилитационный процесс позволит не только увеличить вероятность достижения максимального результата при коррекции синдрома постурального дефицита, но и сократить курс восстановительного лечения и уменьшить количество проводимых курсов. Также использование данного устройства позволит уменьшить длительность периода временной нетрудоспособности и предупредить инвалидность. Кибернетическая платформа для восстановления постуральных дисфункций безопасна, проста в обращении и может применяться как в стационарных, так и амбулаторных условиях лечебно-профилактических и санаторно-курортных учреждений. Данное устройство окажет большую помощь во время реабилитации в хиропрактических центрах, при занятиях в залах ЛФК, фитнес и веллнес-центрах, массажных салонах, при подготовке спортсменов. Также данная кибернетическая платформа может использоваться в домашних условиях с учетом нозологии и особенностей клинического синдрома.
Изобретение относится к медицинской технике. Кибернетическая платформа для восстановления постуральных дисфункций содержит качающую платформу (1) с установленными на ней датчиками угловых перемещений (3) и устройство сопряжения (5) сигналов с датчиков со входом ПЭВМ (6), которая выполнена с возможностью преобразования информации с датчиков в визуальные сигналы для выведения на экран монитора (7) с целью отслеживания их пациентом и реализации обратной биологической связи через визуальный вход постуральной системы. Платформа дополнительно оснащена двумя парами нагревательных элементов (4) из элементов Пельтье с установленными на них датчиками температур и регулятором температур (8). Каждая пара нагревателей установлена на платформе в местах постановки стоп пациента. Нагреватели в паре установлены один в пяточной области стоп, второй в носке стоп. Регулятор температуры обеспечен таким алгоритмом нагрева элементов Пельтье, при котором пациент (10) вынужден изменять свой центр масс с целью обеспечения качающейся платформе горизонтальности положения. Платформа установлена на резиновой торообразной шине (2), давление в которой регулируется компрессором (9). Дополнительно измеряют фазовое запаздывание между сигналами, полученными в ПЭВМ путем обработки сигналов с выхода датчиков температур и угловых датчиков путем сравнения этих сигналов в фазовом детекторе (11). Достигается расширение возможностей системы «человек - кибернетическое устройство» при восстановлении постуральной системы за счет введения наказания за неправильные движения и за счет получения в реальном масштабе времени информации о фазовом запаздывании. Кроме того, использование изобретения позволит увеличить вероятность достижения максимального результата при коррекции синдрома постурального дефицита, сократить курс восстановительного лечения, уменьшить количество проводимых курсов, а также уменьшить длительность периода временной нетрудоспособности и предупредить инвалидность. 2 ил.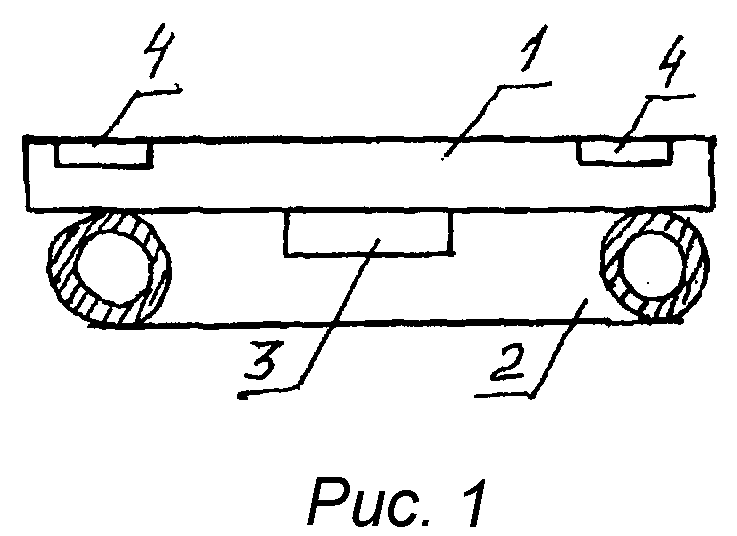
Кибернетическая платформа для восстановления постуральных дисфункций, содержащая качающую платформу с установленными на ней датчиками угловых перемещений, устройство сопряжения сигналов с этих датчиков со входом ПЭВМ, саму ПЭВМ с программным обеспечением, которое позволяет преобразовать информацию с датчиков в визуальные сигналы, которые выводятся на экран монитора с целью отслеживания их пациентом, которые реализуют обратную биологическую связь через визуальный вход постуральной системы, отличающаяся тем, что платформа дополнительно оснащается двумя парами нагревательных элементов из элементов Пельтье с установленными на них датчиками температур и регулятором температур, причем каждая пара нагревателей установлена на платформе в местах постановки стоп пациента, а нагреватели в паре установлены один в пяточной области стоп, второй в носке стоп, регулятор температуры обеспечен алгоритмом нагрева элементов Пельтье таким, при котором пациент вынужден изменять свой центр масс с целью обеспечения качающейся платформе горизонтальности положения, причем платформа установлена на резиновой торообразной шине, давление в которой регулируется компрессором, дополнительно измеряют фазовое запаздывание между сигналами, полученными в ПЭВМ путем обработки сигналов с выхода датчиков температур и угловых датчиков путем сравнения этих сигналов в фазовом детекторе.
| US 2019255388 A1, 22.08.2019 | |||
| WO 2013179230 A1, 05.12.2013 | |||
| KR 1020160065948 A, 09.06.2016 | |||
| СПОСОБ КОРРЕКЦИИ ПЛОСКОВАЛЬГУСНОЙ ДЕФОРМАЦИИ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2621120C2 |
| Компьютеризированный тренажер для обучения технике проведения силовых ручных воздействий на шейном отделе позвоночника | 2018 |
|
RU2679586C1 |

