Изобретение относится к гидроакустической технике, в частности к области активной гидролокации, в том числе к измерителям расстояния для автономных необитаемых подводных аппаратов (АНПА), предназначенным для измерения дистанции от АНПА до препятствия. Изобретение может быть использовано для построения систем навигации АНПА.
В большинстве случаев [1-3], на морских судах, для определения дистанции до объекта применяют эхолот. В источниках [1-3] рассмотрены структуры эхолотов, предназначенных для обнаружения объектов по отраженному эхосигналу, и основные блоки, обеспечивающие измерение дистанции. Решение этой задачи на необитаемых подводных аппаратах имеет ряд особенностей. В частности измеритель дистанции должен обладать существенно меньшими массогабаритными характеристиками и при этом обеспечивать уверенное обнаружение препятствий на расстоянии нескольких десятков метров. Еще более жесткие требования предъявляются к ультразвуковому измерителю дистанции расположенному на АНПА, т.к. в данном случае оператор отсутствует. Основная информация об обстановке в окружающей среде поступает от гидроакустических приборов и аппарат сам, на основе заложенных в него алгоритмов, принимает решения о дальнейшем маневрировании. Конструктивно измеритель целиком и полностью должен быть расположен на аппарате.
Известны различные эхолоты, используемые для обнаружения объектов и измерения дистанции до них [1 – 6].
Эхолот [4] содержит электронно-вычислительную машину с устройством отображения информации (дисплеем), электроакустический преобразователь, передатчик, представляющий собой усилитель со ступенчатой регулировкой мощности, приемник, аналого-цифровой преобразователь, последовательный интерфейс, устройство согласования приемника и передатчика сигналов, включающее в себя коммутатор приема-передачи. Вход регулировки усиления приемника обеспечивает результирующую функцию регулировки усиления как произведения ступенчатой функции и функции, компенсирующей затухание сигнала по дистанции. Входы передатчика обеспечивают управление мощностью, а также ввод формы, вида и длительности излучаемого сигнала.
Эхолот [5] содержит последовательно соединенные микроконтроллер, передатчик, приемник и аналого-цифровой преобразователь, выход которого соединен с микроконтроллером, а также электроакустический преобразователь, подключенный к передатчику и приемнику, и дисплей, вход которого подключен к микроконтроллеру, и блок временной автоматической регулировки усиления, вход которого соединен с микроконтроллером, а передатчик выполнен со ступенчатой регулировкой мощности, вход регулировки которой подключен к микроконтроллеру, приемник выполнен с двумя входами регулировки усиления, первый вход регулировки, обеспечивающий ступенчатую регулировку усиления подключен к микроконтроллеру, а второй вход регулировки подключен к выходу блока временной автоматической регулировки усиления.
Наиболее близким по совокупности признаков к предлагаемому измерителю является "Эхолот для распознавания аномалий водной среды", описанный в патенте [6], который содержит дисплей, контроллер, блок временной автоматической регулировки, блок усреднения, квадратор, умножитель, блок цифровой фильтрации, аналогово-цифровой преобразователь, электроакустическую антенну, блок памяти, передатчик, коммутатор приема-передачи, блок двумерного усреднения, пульт задания режимов и параметров, блок сравнения с порогом и блок классификации аномалий.
Недостатком приведенных аналогов [4, 5] и прототипа [6] является невозможность их использования на автономных необитаемых подводных аппаратах. Известные эхолоты обладают значительными массогабаритными характеристиками, их функциональные блоки разнесены в пространстве на большие расстояния, а также для них необходимо наличие оператора.
Задачей изобретения является разработка малоразмерного ультразвукового измерителя расстояния функционирующего без участия оператора.
Техническим результатом изобретения является компактность, помехоустойчивость и автономность измерителя.
Поставленная задача и технический результат достигаются тем, что согласно изобретению в измеритель, содержащий микроконтроллер, аналогово-цифровой преобразователь, два полосовых фильтра, блок временной автоматической регулировки усиления, цифро-аналоговый преобразователь, управляемый источник напряжения, драйвер усилителя мощности, входной усилитель, усилитель мощности, коммутатор приема-передачи, стабилизатор питания, интерфейс приема-передачи и акустический датчик введены новые признаки, а именно:
1) в качестве зондирующего импульса использован сигнал с линейно-частотной модуляцией;
2) все функциональные блоки измерителя расположены в едином корпусе;
3) работа измерителя происходит согласно заложенному в него алгоритму без участия оператора;
4) малые массогабаритные характеристики.
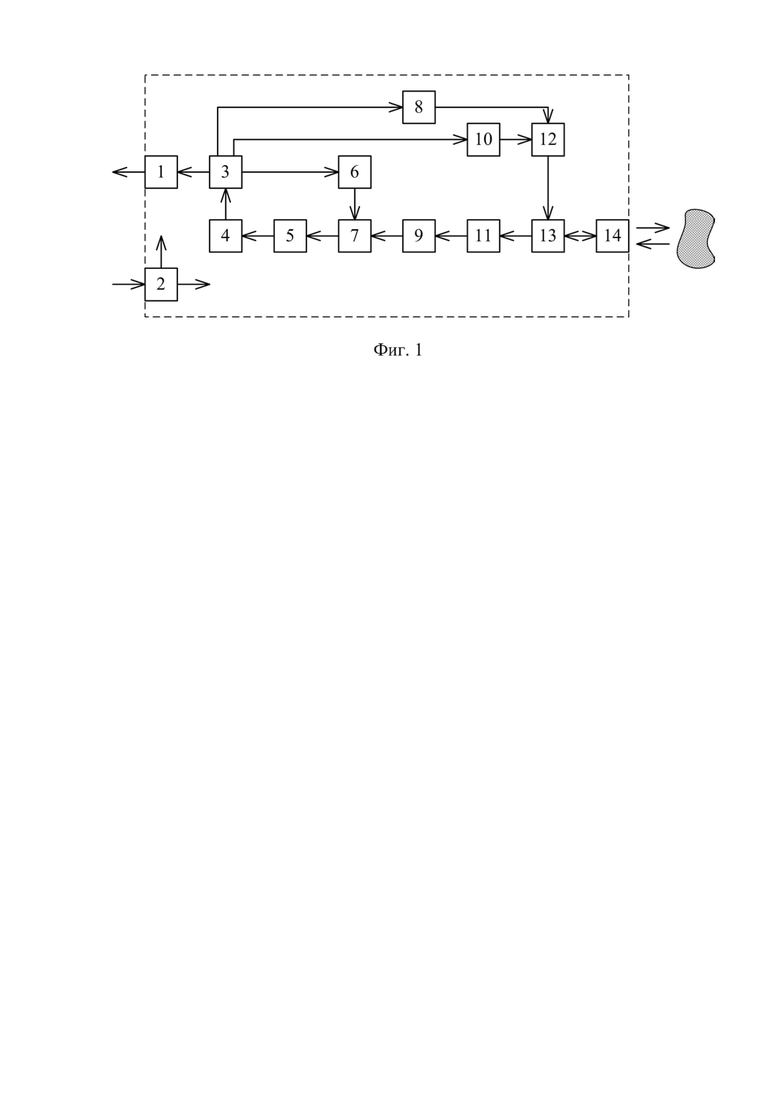
Сущность предлагаемого изобретения представлена на фиг.1, где:
1 – интерфейс приема-передачи;
2 – стабилизатор питания;
3 – микропроцессор;
4 – аналогово-цифровой преобразователь;
5 – второй полосовой фильтр;
6 – цифро-аналоговый преобразователь;
7 – блок временной автоматической регулировки усиления;
8 – управляемый источник напряжения;
9 – первый полосовой фильтр;
10 – драйвер усилителя мощности;
11 – входной усилитель;
12 – усилитель мощности;
13 – коммутатор приема-передачи;
14 – акустический датчик.
Известно, что ЛЧМ сигналы широко применяются в радиолокации [7] и некоторых областях гидроакустики [8]. Особенностью импульсных гидроакустических систем (ГАС) является то, что параметры излучаемого импульса всегда представляют собой компромисс между стремлением добиться наилучшего разрешения по дальности и желанием получить максимально возможную дальность обнаружения. Наилучшее разрешение достигается при наименьшей длительности импульса, в тоже время дальность обнаружения напрямую зависит от количества энергии в импульсе – чем длиннее импульс, тем больше он содержит энергии. Разрешение по дальности зависит не только от средней излучаемой мощности и длительности излучаемого импульса, но и от формы сигнала. Применение ЛЧМ сигнала при сохранении высокой разрешающей способности по дальности, позволяет увеличить дальность действия ГАС в несколько раз. Также использование ЛЧМ сигнала в качестве зондирующего импульса в сочетании с согласованной фильтрацией в приемном тракте ультразвукового измерителя позволяет повысить помехоустойчивость в десятки раз [7]. Для навигации АНПА не требуется большая дальность действия ГАС (до 50 м), однако отношение сигнал/шум является критически важным параметром в данном случае. Именно при большом отношении сигнал/шум возможно обнаружить в толще воды небольшие объекты с малой отражающей поверхностью, либо объекты у которых акустически мягкая граница раздела, вследствие чего большая часть акустической энергии поглощается.
Предлагаемый измеритель работает следующим образом.
Работой всего устройства управляет микропроцессор 3 на базе серии STM32F с функцией обработки сигнала. К его портам выходам подключаются все основные блоки. В частности, он задает режимы работы цифро-аналогового преобразователя 6 (ЦАП), драйвера 10 усилителя мощности 12 (УМ) и управляемого источника напряжения 8 (УИН). Микроконтроллер серии STM32F4 основан на ARM Cortex-M4 и обладает большой производительностью. Динамическое потребление питания позволяет снизить потребление тока при выполнении кода из флеш-памяти до 238 мкА/МГц. Микроконтроллер объединят в себе возможности управления им в реальном времени и производительностью обработки сигналов, характерной для сигнальных процессоров.
Управляющий сигнал с выхода микропроцессора 3 поступает на вход драйвера 10. Драйвер может быть реализован на микросхеме FAN3229 и используется для управления режимами работы УМ 12. Он подает различные уровни напряжения на транзисторы УМ, тем самым закрывая и открывая их. Драйвер обладает двумя дифференциальными входами (A и B) и предназначен для управления N-канальными МОП-транзисторами с улучшенными режимами работы, обеспечивая импульсы высокого пикового тока в течение коротких интервалов переключения. Внутренняя схема обеспечивает функцию блокировки пониженного напряжения, удерживая выходную мощность до тех пор, пока напряжение питания не окажется в рабочем диапазоне. Кроме того, драйверы поддерживают согласованные внутренние задержки распространения между каналами А и В.
Управляющий сигнал с выхода драйвера 10 поступает на вход УМ 12, который может быть реализован на сдвоенном ключевом транзисторе IRF7341 и трансформаторе. IRF7341 является МОП-транзистором с крайне низким сопротивлением всей площади микросхемы и высокой скоростью переключения. УМ предназначен для преобразования маломощного электрического сигнала на входе в сигнал большей мощности на выходе.
Управляющий сигнал с выхода микропроцессора 3 поступает на вход УИН 8, который может быть реализован на стабилизаторе с установкой выходного напряжения LM317MDT, цифровом потенциометре AD8402 и накопителе из конденсаторов. Напряжение стабилизации на стабилизаторе задается путем подачи напряжения смещения с потенциометра, включенного в цепь обратной связи. Меняя сопротивление потенциометра, можно управлять напряжением на выходе стабилизатора. Потенциометр управляется с микроконтроллера по интерфейсу ACPI. Стабилизатор представляет собой 3-контактный регулятор положительного напряжения, способный обеспечить ток более 500 мА в диапазоне выходного напряжения от 1,2 В до 37 В. Потенциометр обеспечивает двухканальное 256-позиционное цифровое управление переменным сопротивлением. Это устройство выполняет ту же функцию электронного регулирования, что и механический потенциометр или переменный резистор. Напряжение питания с выхода УИН 8 поступает на вход УМ 12.
Информационный сигнал с выхода УМ 12 поступает на вход коммутатора приема-передачи 13 (КПП), который предназначен для переключения акустического датчика 14 (АД) между режимами прима и излучения, а также для согласования сопротивления датчика с сопротивлениями УМ 12 и входного усилителя 11 (ВУ). КПП представляет собой диодный коммутатор, который может быть реализован на четырех диодах серии LL4148. Кремниевый диод обладает следующими параметрами: прямой ток – не менее 150 мА, обратное напряжение 100 В и высокая скорость переключения – не более 4 нс.
Информационный сигнал с выхода КПП 13 поступает на вход АД 14, который предназначен для преобразования электрической энергии в акустическую и обратно. Конструктивно датчик состоит из пьезоэлектрических элементов, диэлектрической подложки, акустического и электрического экранов и т.д. АД излучает информационный сигнал в водную среду, где сигнал распространяется, отражается от объекта и возвращается обратно на АД.
Информационный сигнал с выхода АД 14 поступает на вход КПП 13, с выхода которого, попадает на вход ВУ 11 и первого полосового фильтра 9 (ПФ). ВУ предназначен для предварительного повышения напряжения до практически приемлемого значения. ПФ предназначен для выделения необходимых компонент спектра электрического сигнала и подавления нежелательных, тем самым улучшая соотношение сигнал/шум. ВУ и ПФ могут быть реализованы на микросхеме ADA4940-1, являющейся полностью дифференциальным операционным усилителем (ПД ОУ) с низким шумом, малыми искажениями и очень низким энергопотреблением. ПД называют ОУ, имеющие дифференциальные (парафазные) входы и дифференциальные выходы. ДУ позволяют преобразовывать несимметричный или дифференциальный входной сигнал в дифференциальный выходной сигнал. Такие усилители имеют два отдельных контура обратной связи для управления дифференциальным и синфазным выходными напряжениями. Основное преимущество ПД ОУ заключается в том, что они позволяют увеличить динамический диапазон входного сигнала. Также будет меньше шумов напряжения из-за того, что сигнал передается по дифференциальной линии связи. ADA4940-1 оптимизирован для работы от батарейного источника питания, т.к. имеет низкий ток потребления порядка 1 мА. В схеме использованы две микросхемы ADA4940-1, чтобы увеличить крутизну спадания амплитудно-частотной характеристики полосового фильтра на частотах среза. Чем выше крутизна полосового фильтра, тем эффективнее происходит подавление помех и шумов, лежащих за пределами полосы пропускания.
Информационный сигнал с выхода ПФ 9 поступает на вход блока временной автоматической регулировки усиления 7 (ВАРУ). Также на вход ВАРУ поступает сигнал управления с входа ЦАПа 6. ВАРУ может быть реализован на микросхеме AD8338 и представляет собой дифференциальный усилитель с переменным коэффициентом усиления для устройств с полностью дифференциальным каналом сигналов, малой мощностью, низким уровнем шума и четко определенным коэффициент усиления по частоте. Также усилитель характеризуется большим диапазоном регулировки коэффициента усиления. Базовая функция усиления линейная в дБ и управляется напряжением, подаваемым с выхода ЦАПа. Диапазон номинального усиления можно смещать вверх или вниз.
Управляющий сигнал с выхода микропроцессора 3 поступает на вход ЦАПа 6, который предназначен для преобразования цифрового сигнала в аналоговый. ЦАП управляется микропроцессором по интерфейсу управления ACPI. ЦАП может быть реализован на одноканальной, малопотребляющей, 12-разрядной микросхеме AD5681R с буферизированным выходом напряжения. Микросхема содержит активный внутренний источник опорного напряжения 2,5 В и имеет режим пониженного энергопотребления с программно-управляемым выходным импедансом.
Информационный сигнал с выхода ВАРУ 7 поступает на вход второго ПФ 5, предназначенного для дополнительного подавления шумов. ПФ может быть реализован на микросхеме ADA4940-1.
Информационный сигнал с выхода второго ПФ 5 поступает на вход аналогово-цифрового преобразователя 4 (АЦП). АЦП может быть реализован на 16-разрядной микросхеме AD7985 последовательного приближения с быстродействием 2,5 MSPS. Микросхема обладает внутренней синхронизацией, внутренним источником опорного напряжения, схемой коррекции ошибок и универсальным последовательным интерфейсом. Отличительно чертой AD7985 является два режима работы. Первый режим характеризуется очень высокой частотой дискретизации (режим ТУРБО включен). Второй режим рассчитан для задач, в которых важно низкое энергопотребление (режим ТУРБО выключен). АЦП предназначен для преобразования аналогово сигнала в цифровой. Информационный сигнал с выхода АЦП 4 поступает на вход микропроцессора 3.
Информационный сигнал, после обработки, с выхода микропроцессора 3 поступает на вход интерфейса приема-передачи 1. Интерфейс может быть реализован на маломощной микросхеме MAX483. Микросхема имеет драйвера ограничивающие скорости нарастания выходного сигнала и уменьшающие электромагнитные помехи, что позволяет без ошибок передавать данные до 250 кбит/с. Трансиверы микросхемы потребляют ток от 120 до 500 мкА, когда они не нагружены или полностью загружены, но с отключенными драйверами. Микросхема преобразует уровни напряжения микроконтроллера в уровни напряжение необходимые для передачи информации по интерфейсу RS485.
Стабилизация питания 2 электронных блоков может быть реализована на трех линейных стабилизаторах напряжения – LM1117MPX-2.5, LD1117 и L78M05. Линейный регулятор с низким падением напряжения LM1117MPX-2.5 стабилизирует напряжение на выходе равное 2,5 В. Регулятор напряжения LD1117 стабилизирует напряжение на выходе равное 3,3 В. L78M05 стабилизирует напряжение на выходе равное 5 В.
Предлагаемый измеритель работает полностью автономно согласно заложенному в микроконтроллер алгоритму и не требует участия оператора. Все электронные компоненты (блоки 1 – 13) расположены на одной плате, которая находится в одном корпусе с акустическим датчиком 14. Тем самым обеспечивается компактность и малые массогабаритные характеристики изобретения.
Промышленная применимость изобретения определяется тем, что предлагаемый измеритель может быть изготовлен согласно приведенным описанию и чертежам с использованием известных и широко распространенных компонентов.
Малоразмерный ультразвуковой измеритель расстояния может быть использован как промерный эхолот, альтиметр, локатор препятствий, датчик в системе позиционирования или элемент системы подводной связи.
Литература
1. Хребтов А.А. и др. Судовые эхолоты. – Л.: Судостроение, 1982, – 232 с.
2. Морская навигационная техника. Справочник. Под. общ. ред. Е.Л. Смирнова. – СПб.: Элмор, 2002, – 224 с.
3. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. – СПб.: Наука, 2004, – 410 с.
4. Эхолот. Патент 2390796 RU от 2009.04.27, G01S 15/00.
5. Эхолот. Патент 2241242 RU от 2003.03.31, G01S 15/08, G01S 7/52.
6. Эхолот для распознавания аномалий водной среды. Патент 2348054 RU от 2007.08.27, G01S 15/00.
7. Ч. Кук, М. Бернфельд. Радиолокационные сигналы. Пер. с английского под ред. В.С. Кельзона. – М.: Изд-во "Советское радио", 1971 – 568 с.
8. Мосолов С.С., Скнаря А.В., Тутынин Е.В. Некоторые аспекты и перспективы применения сложных сигналов в гидроакустике // Сборник трудов IV Всероссийской конференции "Радиолокация и радиосвязь" – М.: ИРЭ РАН, 2010, С. 170–174.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления формой основного лепестка характеристики направленности излучающей параметрической антенны и устройство для его реализации | 2019 |
|
RU2700042C1 |
| Аварийный радиомаяк | 2019 |
|
RU2733264C1 |
| Устройство измерения составляющих вектора путевой скорости | 2019 |
|
RU2715740C1 |
| МНОГОЧАСТОТНЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2017 |
|
RU2689998C1 |
| ПОРТАТИВНАЯ ШИРОКОДИАПАЗОННАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2804517C1 |
| ПОРТАТИВНАЯ КОРОТКОВОЛНОВАЯ - УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2823629C1 |
| Частотно-импульсный модем для передачи данных по сетям электропитания | 2023 |
|
RU2815411C1 |
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ РЕГИСТРАТОР СИГНАЛОВ | 2016 |
|
RU2616346C1 |
| Носимая автоматизированная радиостанция диапазона КВ-УКВ | 2018 |
|
RU2696977C1 |
| ЭХОЛОТ ДЛЯ РАСПОЗНАВАНИЯ АНОМАЛИЙ ВОДНОЙ СРЕДЫ | 2007 |
|
RU2348054C1 |
Использование: для ультразвукового измерения расстояния. Сущность изобретения заключается в том, что малоразмерный ультразвуковой измеритель расстояния состоит из микроконтроллера, аналогово-цифрового преобразователя, двух полосовых фильтров, блока временной автоматической регулировки усиления, цифро-аналогового преобразователя, управляемого источника напряжения, драйвера усилителя мощности, входного усилителя, усилителя мощности, коммутатора приема-передачи, стабилизатора питания, интерфейса приема-передачи и акустического датчика, выходы микроконтроллера соединены с входами цифро-аналогового преобразователя, управляемого источника напряжения, драйвера усилителя мощности и интерфейса приема-передачи, выходы управляемого источника напряжения и драйвера усилителя мощности соединены с входами усилителя мощности, выход усилителя мощности соединен с входом коммутатора приема-передачи, выходы коммутатора соединены с входами входного усилителя и акустического датчика, выход акустического датчика соединен с входом коммутатора приема-передачи, выход входного усилителя соединен с входом первого полосового фильтра, выходы первого полосового фильтра и цифро-аналогового преобразователя соединены с входами блока временной автоматической регулировки усиления, выход блока временной автоматической регулировки усиления соединен с входом второго полосового фильтра, выход второго полосового фильтра соединен с входом аналогово-цифрового преобразователя, выход аналогово-цифрового преобразователя соединен с входом микроконтроллера, причем в качестве зондирующего импульса использован сигнал с линейно-частотной модуляцией, все функциональные блоки измерителя расположены в едином корпусе, а работа измерителя происходит согласно заложенному в него алгоритму без участия оператора. Технический результат: обеспечение возможности создания компактного, помехоустойчивого и автономного ультразвукового измерителя расстояния. 1 ил.
Малоразмерный ультразвуковой измеритель расстояния, характеризующийся тем, что состоит из микроконтроллера, аналогово-цифрового преобразователя, двух полосовых фильтров, блока временной автоматической регулировки усиления, цифро-аналогового преобразователя, управляемого источника напряжения, драйвера усилителя мощности, входного усилителя, усилителя мощности, коммутатора приема-передачи, стабилизатора питания, интерфейса приема-передачи и акустического датчика, выходы микроконтроллера соединены с входами цифро-аналогового преобразователя, управляемого источника напряжения, драйвера усилителя мощности и интерфейса приема-передачи, выходы управляемого источника напряжения и драйвера усилителя мощности соединены с входами усилителя мощности, выход усилителя мощности соединен с входом коммутатора приема-передачи, выходы коммутатора соединены с входами входного усилителя и акустического датчика, выход акустического датчика соединен с входом коммутатора приема-передачи, выход входного усилителя соединен с входом первого полосового фильтра, выходы первого полосового фильтра и цифро-аналогового преобразователя соединены с входами блока временной автоматической регулировки усиления, выход блока временной автоматической регулировки усиления соединен с входом второго полосового фильтра, выход второго полосового фильтра соединен с входом аналогово-цифрового преобразователя, выход аналогово-цифрового преобразователя соединен с входом микроконтроллера, причем в качестве зондирующего импульса использован сигнал с линейно-частотной модуляцией, все функциональные блоки измерителя расположены в едином корпусе, а работа измерителя происходит согласно заложенному в него алгоритму без участия оператора.
| Научный руководитель В.И | |||
| Каевицер, Отчет о научно-исследовательской работе по теме "Применение сложных сигналов в гидролокационной аппаратуре нового поколения для дистанционного акустического картирования дна водоемов", ФГБУИ Институт радиотехники и электроники им | |||
| В.А.Котельникова РАН Фрязинский филиал, |

