Изобретение относится к гидроакустической технике и может быть использовано при конструировании гидроакустических систем.
Определение рельефа морского дна при его картографировании и изучении геологической структуры является одной из задач океанографии. Появление и широкое распространение эхолотов позволило вести непрерывные замеры глубин во время движения судна и регистрировать профиль морского дна на больших протяжениях, т.е. сделало измерение глубин двумерным. В настоящее время при записи глубины океанского дна и его рельефа используются взаимно дополняющие друг друга устройства для гидролокационного картирования: двухчастотные эхолоты, установленные на надводных судах, у которых низкочастотный тракт обеспечивает быстрое, но «интегрирующее» широколучевое (300) зондирование, в то время как высокочастотный тракт за счет узкого луча (20) позволяет регистрировать гораздо более мелкие детали, а также глубоководное буксируемое устройство, предназначенное для работы на высоте (100-200) м над поверхностью дна, причем, его гидроакустические антенны облучают последнее под косыми углами специальным образом (основной лепесток излучения имеет «ножевидную» форму: широкую - в угломестной, но узкую - в азимутальной плоскостях соответственно. Метод бокового обзора дает еще более тонкие детали некоторых донных форм, так как осуществляется регистрация каждого из ультразвуковых эхосигналов от многочисленных элементов рельефа дна, находящихся на разных расстояниях, однако интерпретация и «расшифровка» полученных данных достаточно трудоемка.
Из уровня техники известен гидролокатор для обнаружения подводных препятствий и определения их координат [Авт. Свидетельство №187327 СССР: МПК G01C, G08F; заявл. 29.05.1963; опубл. 11.10.1966, Бюл №20.], содержащий генератор, импульсный модулятор, усилитель мощности, коммутатор, поворотное устройство, многоэлементную приемоизлучающую гидроакустическую антенну, усилитель, детектор, блок индикации, блок управления. В процессе эксплуатации устройства применяется специальная конструкция гидроакустической антенны, активный элемент которой состоит из четырех электроакустических преобразователей, имеющих различные пространственные характеристики направленности (ХН) излучения, акустические поля которых в результате суперпозиции колебательных процессов в среде лоцирования и создают желаемую форму результирующей характеристики направленности (ХН). Конструкция антенны выполнена следующим образом - на плоскую прямоугольную металлическую диафрагму размером (70×20) мм наклеены электроакустические преобразователи, сигнальные электроды которых загерметизированы, а режим одностороннего излучения обеспечен тем, что диафрагма является крышкой для воздухозаполненного корпуса антенны. При использовании рабочей частоты излучения 525 кГц и указанных геометрических размерах приемоизлучающая интерференционная антенна формирует акустическое поле со следующими характеристиками: в угломестной (θ) / азимутальной (ϕ) плоскостях - угловая ширина основного лепестка ХН по уровню 0,7 θ0,7(ƒ)=2°/ϕ0,7(ƒ)=7,2°, первые боковые лепестки в направлении θ1(БП)=3,5°/ϕ1(БП)=12° с уровнем Р1(БП)=(-13,3 дБ), вторые боковые лепестки в направлении θ2(БП)=5,8°/ϕ2(БП)=20° от горизонта с уровнем Р2(БП)=(-17,8 дБ), третий боковой лепесток в направлении θ3(БП)=8,2°/ϕ3(БП)=30° от горизонта с уровнем Р3(БП)=(-21 дБ).
К недостаткам описанной системы следует отнести то, что пространственная избирательность приемоизлучающей гидроакустической антенны оказывает существенное негативное влияние как на точность, так и на достоверность данных о подводной обстановке.
Признаки, совпадающие с заявляемым объектом: генератор, коммутатор, гидроакустическая антенна, усилитель, детектор, индикатор, блок управления.
Известна система подводного звуковидения с рабочей частотой 30 кГц, установленная на батискафе «Архимед» [К. Клей, Г. Медвин Акустическая океанография: основы и применения - М.: изд-во «Мир», 1980. - с. 171-176], подводных аппаратах «Циана» (Франция) и «Олвин» (США) [Дж. Р. Хейцлер, У.Б. Брайен. Дно океана в пределах срединно-атлантического рифта // Наука об океане / Пер. с англ.; Под ред. О.И. Мамаева. - М.: Прогресс, 1981. - с. 104-136], содержащая многоэлементную интерференционную антенну, которая снабжена отражателем, блок управления, блок индикации и приемоизлучающий тракт, включающий в себя генератор, приемник и коммутатор, причем, выходы блока управления соединены с управляющими входами блока индикации, приемника и генератора, выход генератора соединен через коммутатор со входом многоэлементной интерференционной антенны, второй выход коммутатора соединен с входом приемника, выход которого соединен с информационным входом блока индикации.
Недостатками данного устройства являются невозможность генерации в водной среде полигармонического зондирующего сигнала за счет нелинейных эффектов, потери при отражении акустических сигналов, а также вероятность искажения результирующей характеристики направленности за счет возбуждения собственных резонансных колебаний металлических элементов акустического экрана-отражателя сложной конструкции.
Признаки, совпадающие с заявляемым объектом: генератор, коммутатор, гидроакустическая антенна, усилитель, детектор, индикатор, блок управления.
Известен акустический эхо-импульсный локатор [авт. св. СССР №1228659 МКИ G01S 7/52, опубл. 20.12.1999, Бюл. №35], принятый за прототип, содержащий индикатор, блок управления, входовый сумматор, последовательно соединенные генератор радиоимпульсов, коммутатор, многоэлементную приемоизлучающую гидроакустическую антенну, цепочек из последовательно соединенных полосового фильтра с частотами пропускания, усилителя, детектора и аттенюатора, параллельно включенных таким образом, что входы фильтров объединены и подключены к коммутатору, а выходы аттенюаторов, управляющие входы которых подключены к блоку управления, соединены с входами сумматора, выход которого подключен к сигнальному входу индикатора.
Недостатками прототипа являются ограничение энергетического потенциала гидроакустической антенны величиной площади ее плоской апертуры; облучение участков с малой протяженностью полосы обзора при значительной «мертвой» зоне; вероятность регистрации недостоверных данных.
Задачей изобретения является расширение эксплуатационных возможностей гидролокатора бокового обзора, заключающееся в уменьшении мертвой зоны и увеличении протяженности обследуемой полосы донной поверхности в направлении эхопоиска, за счет использования нелинейного эффекта самовоздействия звуковых волн.
Техническим результатом изобретения является улучшение качества гидролокационного изображения подводных объектов за счет регистрации и визуализации рассеянных ими ультразвуковых полей кратных частот, формирующихся в водной среде вследствие нелинейного эффекта самовоздействия.
Технический результат достигается тем, что в многочастотном гидролокаторе бокового обзора, содержащем блок индикации, блок управления, n-входовый сумматор, последовательно соединенные генератор радиоимпульсов, коммутатор и многоэлементную приемоизлучающую интерференционную антенну, апертура антенны, состоящая из приемоизлучающих поверхностей электроакустических преобразователей, выполнена в виде выпуклого в направлении эхопоиска отсека цилиндрической поверхности радиусом кривизны R, у которого образующая  расположена в азимутальной плоскости и по длине на порядок больше, чем размер хорды α, стягивающей крайние симметричные относительно акустической оси точки дуги длиной L, стрела прогиба h, рабочий сектор α, длина дуги L, хорда α, связаны между собой соотношениями h=α×tg(α/4)/2=R[1-cos(α/2)]; L=0,01745 Rα; α=2R sin(α/2).
расположена в азимутальной плоскости и по длине на порядок больше, чем размер хорды α, стягивающей крайние симметричные относительно акустической оси точки дуги длиной L, стрела прогиба h, рабочий сектор α, длина дуги L, хорда α, связаны между собой соотношениями h=α×tg(α/4)/2=R[1-cos(α/2)]; L=0,01745 Rα; α=2R sin(α/2).
Коммутатор соединен через n цепочек, состоящих из последовательно соединенных полосовых фильтров, усилителей, детекторов и аттенюаторов, параллельно включенных таким образом, что входы полосовых фильтров с частотами пропускания ƒ, 2ƒ, 3ƒ, …, nƒ объединены и подключены к выходу коммутатора, а выходы аттенюаторов, управляющие входы которых подключены к блоку управления, соединены с n входами сумматора, выход которого подключен к сигнальному входу блока индикации.
Изобретение поясняется чертежами, где:
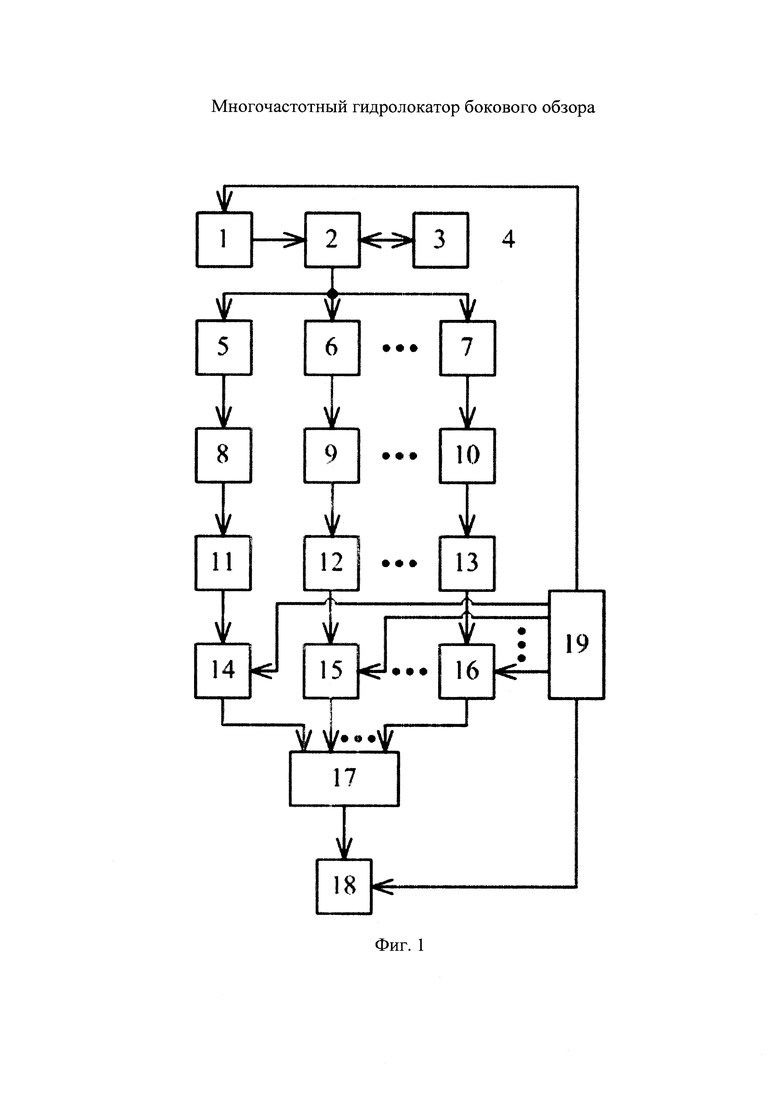
на фиг. 1 изображена структурная схема многочастотного гидролокатора бокового обзора с использованием нелинейного эффекта самовоздействия;
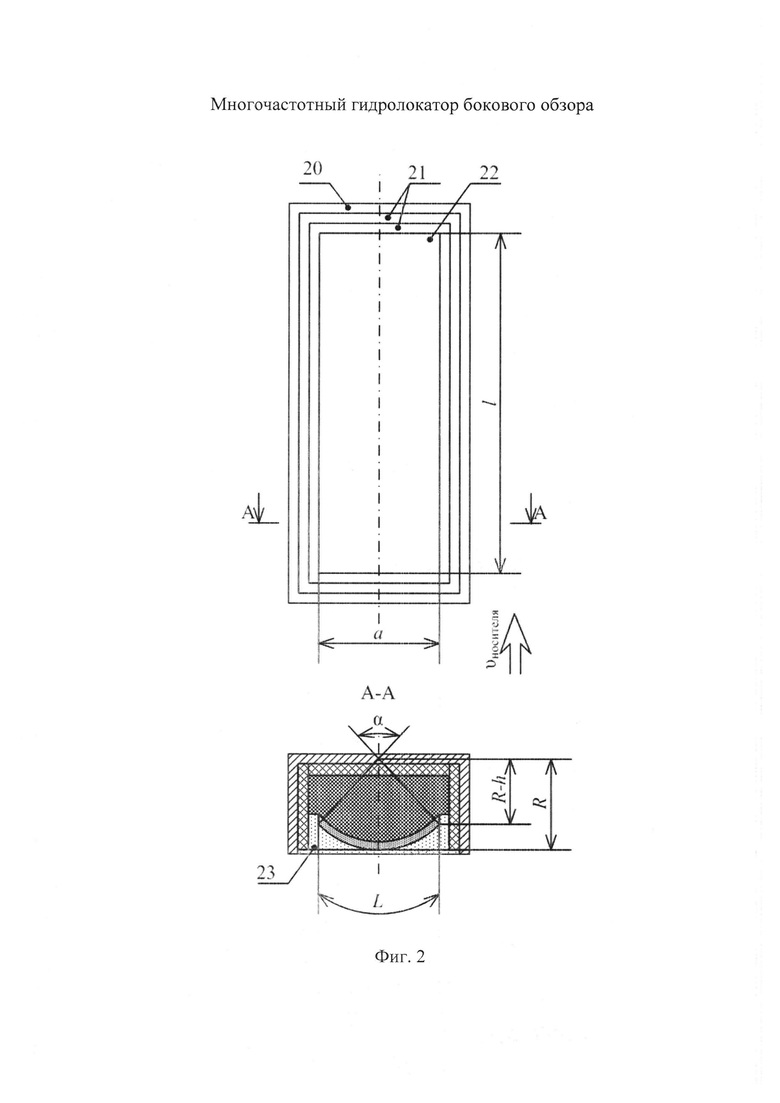
на фиг. 2 схематично показана конструкция многоэлементной приемоизлучающей интерференционной антенны гидролокатора;
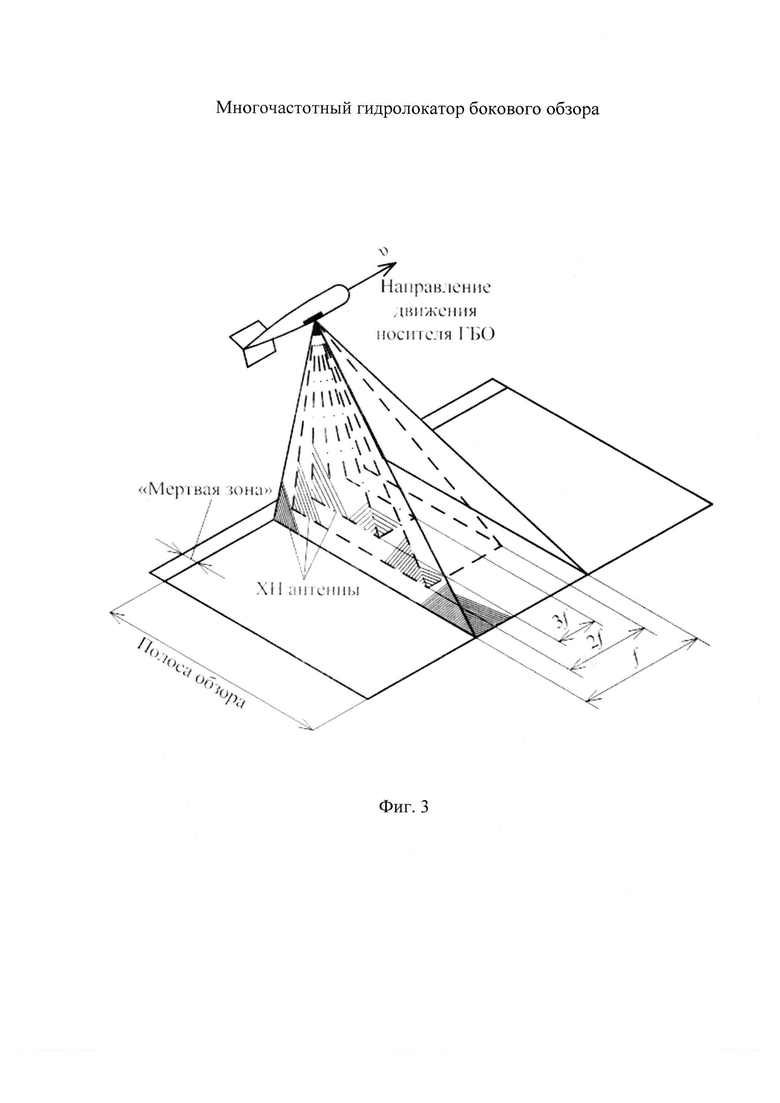
на фиг. 3 схематически изображено получение гидролокационного изображения морского дна с помощью многочастотного гидролокатора бокового обзора с использованием нелинейного эффекта самовоздействия.
Многочастотный гидролокатор бокового обзора с использованием нелинейного эффекта самовоздействия (фиг. 1) содержит блок индикации 18, блок управления 19, n-входовый сумматор 17, последовательно соединенные генератор радиоимпульсов 1, коммутатор 2, многоэлементную приемоизлучающую интерференционную антенну 3, имеющую возможность осуществления через нелинейную водную среду 4 акустического контакта с объектами, находящимися в области обзора. Выход антенны 3 через коммутатор 2 соединен через n цепочек из последовательно соединенных полосового фильтра (5, 6, …, 7), усилителя (8, 9, …10), детектора (11, 12, …13) и аттенюатора (14, 15, …, 16) параллельно включенных таким образом, что входы полосовых фильтров 5, 6, …7 с частотами пропускания ƒ, 2ƒ, 3ƒ, …, nƒ объединены и подключены к выходу коммутатора 2, а выходы аттенюаторов 14, 15, …, 16, управляющие входы которых подключены к блоку управления 19, соединены с n входами сумматора 17, выход которого подключен к сигнальному входу блока индикации 18.
Многоэлементная приемоизлучающая интерференционная антенна 3 (фиг. 2) гидролокатора бокового обзора состоит из корпуса 20, внутренние поверхности которого покрыты звукоизолирующими экранами 21, основания (на чертеже не показано) с укрепленными на нем электроакустическими преобразователями 22, имеющими резонансную частоту ƒ, и звукопрозрачного герметизирующего компаунда 23, заполняющего внутренний объем корпуса 20, причем, апертура антенны, состоящая из приемоизлучающих поверхностей электроакустических преобразователей 22, выполнена в виде выпуклого в направлении эхопоиска отсека цилиндрической поверхности радиусом кривизны R, у которого образующая расположена в азимутальной плоскости и по длине на порядок больше, чем размер хорды α, стягивающей крайние симметричные относительно акустической оси точки дуги длиной L, стрела прогиба h, рабочий сектор α, длина дуги L, хорда α, связаны между собой соотношениями h=α×tg(α/4)/2=R[1-cos(α/2)]; L=0,01745 Rα; α=2Rsin(α/2).
Функционирование многочастотного гидролокатора бокового обзора осуществляется следующим образом. С выхода генератора радиоимпульсов 1, управляющий вход которого соединен с выходом блока управления 19, радиоимпульс с частотой заполнения ƒ через коммутатор 2 поступает на многоэлементную приемоизлучающую интерференционную антенну 3. В силу пьезоэлектрических свойств электроакустические преобразователи 22 совершают колебания, которые через звукопрозрачный герметизирующий компаунд 23 передаются в водную среду 4 и распространяются в виде сгущений и разряжений, т.е. ультразвуковых волн достаточной интенсивности во всех направлениях, что создает в водном пространстве 4 от антенны ультразвуковое поле. При синфазном электрическом возбуждении всех электроакустических преобразователей 22, составляющих многоэлементную интерференционную антенну с приемоизлучающей апертурой в виде отсека цилиндрической поверхности, ее характеристика направленности в водной среде будет обусловлена интерференцией колебаний в каждой точке водной среды 4, проявляющейся в перераспределении ультразвуковой энергии в виде чередующихся минимумов и максимумов амплитуды результирующего колебания при изменении угла отклонения лучей от нормали к линии, соединяющей источники колебаний (поверхность звукопрозрачного герметизирующего компаунда 23). При эхолокации антенна преобразует подаваемые на нее импульсы электрической энергии и излучает мощные импульсы ультразвуковых колебаний необходимой длительности. В данных условиях начинает меняться роль гидроакустического канала как звукопроводящей среды - от «линейной» акустики, в рамках которой изменение плотности воды 4 еще линейно зависит от изменения звукового давления распространяющегося волнового процесса, что обусловливает выполнение принципа суперпозиции, до «нелинейной» акустики, где начинает проявляться нелинейность ее упругих свойств, вызывающая самовоздействие распространяющихся волн конечной амплитуды, приводя к генерации новых спектральных компонент с частотами ƒ, 2ƒ, 3ƒ, …, nƒ. Таким образом, при распространении в среде 4 акустический сигнал конечной амплитуды испытывает накапливающиеся искажения профиля ультразвуковой волны, что физически означает генерацию высших гармонических компонент 2ƒ, 3ƒ, …, nƒ излученного сигнала с частотой ƒ.
Акустические поля сигналов высших гармоник обладают важными для эхопоиска пространственными характеристиками. Так как на акустической оси антенны 3 изменение свойств водной среды 4 под действием мощной волны накачки с частотой ƒ происходит в наибольшей степени, то главный максимум излучения для каждой последующей гармоники с частотами ƒ, 2ƒ, 3ƒ, …, nƒ имеет более малую угловую ширину по уровню 0,7 как в угломестной (θ), так и в азимутальной (ϕ) плоскостях. В направлениях дополнительных максимумов излучения на основной частоте ƒ изменение свойств среды 4 происходит в гораздо меньшей степени, что приводит к снижению эффективности генерации гармоник в этих направлениях, т.е. уровень бокового поля для каждой последующей гармоники меньше, чем у предыдущей. Так, например, для одного из вариантов «трансформированной» модели многоэлементной приемоизлучающей интерференционной антенны в виде отсека цилиндрической поверхности (рабочий сектор α=45° в угломестной (θ) плоскости) в режиме излучения угловая ширина основного лепестка по уровню 0,7 и уровень бокового поля ХН составят: θ0,7(ƒ)ИЗЛ=32° и PИЗЛ(θ)1(БП,ƒ)=(-11) дБ; θ0,7(2ƒ)ИЗЛ=20° и PИЗЛ(θ)1(БП,2ƒ)=(-20) дБ; θ0,7(3ƒ)=18° и PИЗЛ(θ)1(БП,3ƒ)=(-27) дБ; θ0,7(4ƒ)=16.3° и PИЗЛ(θ)1(БП,4ƒ)=(-30) дБ; θ0,7(5ƒ)ИЗЛ=12,5° и PИЗЛ(θ)1(БП,ƒ)=(-30) дБ соответственно, а для режима приема на спектральных компонентах полигармонического сигнала - уровень бокового поля РПР(θ)1БП, ƒ. 2ƒ, 3ƒ, 4ƒ, 5ƒ)=(-12 дБ) и кратные (~1/n) величины угловой ширины по уровню 0,7 основных лепестков: θ0,7(ƒ)ПР=32° (100 кГц), θ0,7(2ƒ)ПР=16° (200 кГц), θ0,7(3ƒ)ПР=10,7° (300 кГц), θ0,7(4ƒ)ПР=8° (400 кГц), θ0,7(5ƒ)ПР=6,4° (500 кГц). Данное воздействие нелинейного эффекта самовоздействия может быть использовано для регулировки угловой разрешающей способности антенны предлагаемого устройства как в угломестной (θ), так и в азимутальной (ϕ) плоскостях на имеющихся спектральных компонентах с частотами ƒ, 2ƒ, 3ƒ, …nƒ, дает возможность расширить эксплуатационные возможности гидролокатора бокового обзора (фиг. 3). Импульс ультразвуковых колебаний кратных частот распространяется в водной среде 4 и при наличии на его пути объекта, волновое сопротивление которого отличается от волнового сопротивления воды, происходит отражение акустических колебаний от него, причем, некоторая часть энергии импульса распространяется в обратном направлении и достигает, пройдя через звукопрозрачный герметизирующий компаунд 23, электродов - рабочих поверхностей полуволновых электроакустических преобразователей 22, находящихся в режиме приема. Вторичное гидроакустическое «эхо-поле», образованное наложением колебаний основной частоты и его высших гармоник, воздействуя на электроды, передается пьезоэлектрическому материалу полуволновых электроакустических преобразователей 22, в результате чего на них вырабатываются соответствующие им электрические, поступающие через коммутатор 2 на входы n цепочек, каждая из которых состоит из последовательно соединенных полосового фильтра 5, 6, …7 с частотами пропускания ƒ, 2ƒ, 3ƒ, …nƒ, усилителя 8, 9, …10, детектора 11, 12, …13 и аттенюатора 14, 15, …, 16.
Отраженный полигармонический сигнал достигает многоэлементной интерференционной антенны 3, находящейся в режиме приема, которая вырабатывает электрические сигналы, соответствующие указанным выше спектральным компонентам с частотами ƒ, 2ƒ, 3ƒ, …, iƒ, …nƒ. Уровни каждого из электрических сигналов определяются амплитудными характеристиками направленности Rp.ƒ(ϕ,θ), Rp.2ƒ(ϕ,θ), Rp.3ƒ(ϕ,θ), Rp.iƒ(ϕ,θ), а также чувствительностями Yƒ, Y2ƒ, Y3ƒ, …, Yiƒ в режиме приема многоэлементной интерференционной антенны 3 для каждой из рассеянных границей раздела акустических волн с указанными выше частотами колебаний, где ϕ,θ - углы прихода рассеянных волн в азимутальной и угломестной плоскостях, отсчитываемые от нормали к апертуре антенны 3.
Эффективность направленного действия многоэлементной интерференционной антенны 3 в режиме приема эхосигналов в полосе частот, соответствующей указанному выше диапазону дискретных отраженных компонент сформировавшегося излучения, даже в предположении их некогерентности будет повышена, так как суммарная интенсивность есть результат энергетического суммирования интенсивностей отдельных спектральных составляющих. Рассмотрим параллельную обработку электрических колебаний с частотами ƒ, 2ƒ, 3ƒ, …, nƒ в n - канальном приемном тракте (фильтрация - блоки 5, 6, …7; усиление - блоки 8, 9, …10; детектирование - блоки 11, 12, …, 13), особенностью которой является приведение в аттенюаторах 14, 15, …, 16 амплитуд электрических сигналов к требуемым величинам перед обработкой их в n входовом сумматоре 17. Критерием подбора величин коэффициентов передачи аттенюаторов 14, 15, …, 16 является необходимость формирования равносигнальной формы основного лепестка характеристики направленности многоэлементной интерференционной антенны 3 в режиме приема, обеспечивающей равномерность гидролокационного изображения горизонтальных участков дна по координате «наклонная дальность» в пределах полосы обзора с помощью блока индикации 18. Если в пределах полосы пропускания приемного тракта дискретный спектр частотных составляющих является равномерным, то общая характеристика направленности по интенсивности  представляет собой среднее арифметическое их характеристик направленности
представляет собой среднее арифметическое их характеристик направленности  для многоэлементной интерференционной антенны 3 на отдельных частотных составляющих:
для многоэлементной интерференционной антенны 3 на отдельных частотных составляющих:
 ,
,
где RP⋅i(ϕ,θ) - характеристика направленности по давлению на i-той частоте дискретной составляющей спектра, n - общее число дискретных частотных составляющих спектра эхосигнала.
Заявляемое изобретение может найти широкое применение в области гидроакустики, в связи с расширением эксплуатационных возможностей гидролокатора бокового обзора, заключающегося в уменьшении мертвой зоны и увеличении протяженности обследуемой полосы донной поверхности в направлении эхопоиска, за счет использования нелинейного эффекта самовоздействия звуковых волн. При этом достигается улучшение качества гидролокационного изображения подводных объектов за счет регистрации и визуализации рассеянных ими ультразвуковых полей кратных частот, формирующихся в водной среде вследствие нелинейного эффекта самовоздействия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| МНОГОЧАСТОТНОЕ ПРИЕМОИЗЛУЧАЮЩЕЕ АНТЕННОЕ УСТРОЙСТВО | 2018 |
|
RU2700031C1 |
| Акустический способ и устройство измерения параметров морского волнения | 2019 |
|
RU2721307C1 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| Акустический способ измерения параметров движения слоистой морской среды на прибрежной акватории | 2023 |
|
RU2833473C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| МНОГОЧАСТОТНЫЙ КОРРЕЛЯЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЙ | 2022 |
|
RU2795577C1 |
| Акустический способ измерения параметров движения слоистой морской среды | 2022 |
|
RU2801053C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
Изобретение относится к гидроакустической технике и может быть использовано при конструировании гидроакустических систем. Многочастотный гидролокатор бокового обзора содержит блок индикации, блок управления, n-входовый сумматор, последовательно соединенные генератор радиоимпульсов, коммутатор и многоэлементную приемоизлучающую интерференционную антенну, отличается тем, что апертура антенны выполнена в виде выпуклого в направлении эхопоиска отсека цилиндрической поверхности радиусом кривизны R, у которого образующая l расположена в азимутальной плоскости и по длине на порядок больше, чем размер хорды α, стягивающей крайние симметричные относительно акустической оси точки дуги длиной L. Изобретение расширяет эксплуатационные возможности гидролокатора бокового обзора, уменьшая мертвую зону и увеличивая протяженность обследуемой полосы донной поверхности в направлении эхопоиска, за счет использования нелинейного эффекта самовоздействия звуковых волн. 2 з.п. ф-лы, 3 ил.
1. Многочастотный гидролокатор бокового обзора, содержащий блок индикации, блок управления, n-входовый сумматор, последовательно соединенные генератор радиоимпульсов, коммутатор и многоэлементную приемоизлучающую интерференционную антенну, отличающийся тем, что апертура антенны выполнена в виде выпуклого в направлении эхопоиска отсека цилиндрической поверхности радиусом кривизны R, у которого образующая l расположена в азимутальной плоскости и по длине на порядок больше, чем размер хорды а, стягивающей крайние симметричные относительно акустической оси точки дуги длиной L.
2. Многочастотный гидролокатор бокового обзора по п. 1, отличающийся тем, что стрела прогиба h, рабочий сектор α, длина дуги L, хорда а, связаны между собой соотношениями h=a×tg(α/4)/2=R[1-cos(α/2)]; L=0,01745Rα; а=2Rsin(α/2).
3. Многочастотный гидролокатор бокового обзора по п. 1, отличающийся тем, что коммутатор соединен через n цепочек, состоящих из последовательно соединенных полосовых фильтров, усилителей, детекторов и аттенюаторов, параллельно включенных таким образом, что входы полосовых фильтров с частотами пропускания ƒ, 2ƒ, 3ƒ, …, nƒ объединены и подключены к выходу коммутатора, а выходы аттенюаторов, управляющие входы которых подключены к блоку управления, соединены с n входами сумматора, выход которого подключен к сигнальному входу блока индикации.
| ГИДРОАКУСТИЧЕСКИЙ ПРИБОР ДЛЯ ОБНАРУЖЕНИЯ | 0 |
|
SU187327A1 |
| Устройство для отгонки ароматических углеводородов из промывного масла | 1926 |
|
SU31283A1 |
| ГИДРОАКУСТИЧЕСКАЯ ПРИЕМНАЯ МНОГОЭЛЕМЕНТНАЯ АНТЕННА ВЫПУКЛОЙ ФОРМЫ ДВОЙНОЙ КРИВИЗНЫ, РАЗМЕЩАЕМАЯ В НОСОВОЙ ОКОНЕЧНОСТИ НОСИТЕЛЯ | 2016 |
|
RU2626072C1 |
| 0 |
|
SU152944A1 | |
| ГИДРОАКУСТИЧЕСКАЯ МНОГОЭЛЕМЕНТНАЯ АНТЕННА ВЫПУКЛОЙ ФОРМЫ | 2004 |
|
RU2259643C1 |

