Изобретение относится к области возобновляемых источников энергии и предназначено для использования в ветроэнергетике.
В настоящее время в ветроэнергетике доминируют ветротурбины с горизонтальной осью вращения. Несмотря на то, что для усовершенствования этих турбин были затрачены весьма значительные средства, они имеют ряд принципиальных недостатков, которые не могут быть устранены, так как они присущи аэромеханической схеме этих ветротурбин.
Известно, что участок лопасти вблизи комля (около 20% длины лопасти) не вносит сколько-нибудь существенный вклад в преобразование энергии ветра. Ветротурбины требуют установки на достаточно высоких колоннах, причем тяжёлые электрогенераторы и редукторы располагаются на верхнем конце колонны, что вызывает необходимость увеличения изгибной жесткости (следовательно, и веса) колонны. Сила аэродинамического сопротивления ротора ветротурбины создаёт значительный изгибающий момент, для восприятия которого требуется строительство многотонного фундамента. Ветротурбины с вертикальной осью вращения могут быть эффективны только при достаточно большой скорости вращения. Вследствие этого их использование ограничено установками малой мощности.
Известны способы преобразования энергии ветровых и энергетических потоков воздуха (Cristina Archer and Ken. Caldiera. Global Assesment for High Altitude Wind Power // Energies 2009, 2, 307-319; DOI: 10.3390/en20200307), в которых осуществляют операции управления движением и аэродинамической подъёмной силой крыльевой системы путём регулирования натяжения тросов, соединяющих систему с наземной платформой, что обеспечивает только функционирование системы. Недостатком данных способов преобразования энергии ветровых потоков является малая эффективность преобразования энергии, поскольку в них отсутствуют операции, направленные на максимизацию преобразования энергии ветровых потоков, а также операции по адаптации системы к данной скорости ветра.
Также известно, что скорость ветра на средних и больших высотах значительно выше, чем в приземном пограничном слое (Cristina Archer and Ken. Caldiera. Global Assesment for High Altitude Wind Power // Energies 2009, 2, 307-319; DOI: 10.3390/en20200307; Tony Burton (et all). Wind Energy Handbook. – Wiley and Sons, 2001. DOI: 10.1002/0470846062). Для преобразования энергии ветровых потоков на высотах были разработаны и предложены аэростаты, несущие ветротурбины с электрическими генераторами и передающие энергию на землю по кабелю (Tony Burton (et all). Wind Energy Handbook. – Wiley and Sons, 2001. DOI:10.1002/0470846062; Bryan Roberts (et all). Harnessing High Altitude Wind Power//IEEE Transactions on Energy conversion, Vol.22, No1, March 2007).
Системы такого типа имеют следующие недостатки:
– большой объём и габариты аэростата, обусловленные весом ветротурбины, генератора, а также электрического кабеля для передачи энергии на землю;
– высокая нагрузка на привязной трос аэростата вследствие большого аэродинамического сопротивления системы, что вызывает необходимость дополнительного увеличения подъёмной силы аэростата (то есть его объёма и размеров), а также это вызывает существенное отклонение положения аэростата от точки закрепления троса на земле, в результате чего значительно увеличиваются потребные длины и вес привязного троса и электрического кабеля.
Для преобразования энергии ветра на средних высотах были предложены и разрабатываются системы другого типа, характеризующиеся тем, что в этих системах электрический генератор расположен на наземной платформе (Miles L.Loyd. Crosswind Kite Power // J.Energy, Vol.4, No3, article № 80-4075; M.Canale, L.Faggiano and M.Milanese. High Altitude Wind Energy Generation Using Controlled Power Kites// IEEE Transactions on Control Systems Technology, 2010; Maxim Ahmed, Ahmad Hably, Seddik Bacha. High Altitude Wind Power Systems: A survey on flexible Power Kites // XXth International Conference on Electrical Machines (ICEM'2012), Sep. 2012, Marseille, France. pp.2083-2089.)
Указанные системы используют для преобразования энергии ветра в аэродинамические силы, действующие на конструкцию типа воздушного змея, причем управление положением этой конструкции относительно ветрового потока осуществляется с земли. С целью снижения веса в таких системах используются крыльевые системы типа параплана.
К недостаткам данных систем можно отнести следующее:
– крыло параплана имеет низкое аэродинамическое качество;
– система имеет пассивные зоны и фазы, когда энергия не производится;
– наземная карусель с каретками для нескольких парапланов занимает большую площадь, лишает систему мобильности, существенно затрудняет управление, не гарантируя высокую надёжность системы;
– система не имеет никаких средств обеспечения устойчивости при порывах ветра.
Наиболее близкими по технической сущности к предлагаемому изобретению являются способ и устройство, описанные в европейском патенте «Apparatus, plant and method for conversion of wind or water flow energy into electrical energy» (European Patent EP 158174 3B1, дата приоритета: 08.10.2003).
Способ, описанный в вышеуказанном патенте заключается в том, что для генерации энергии используют возвратно-поступательное движение двух крыльевых систем вдоль направляющего троса, при достижении крайних точек движения изменяют угол атаки крыла каждой крыльевой системы с помощью механических устройств так, что, если первая система достигла крайнего верхнего положения, то её угол атаки уменьшают до нуля, а угол атаки второй системы, находящейся в этот момент в крайнем нижнем положении, увеличивают до максимальной заданной величины; в зависимости от величины производимой энергии регулируют высоту над землёй крыльевых систем путём изменения длин тросов, соединяющих системы с наземной платформой, изменяют также величину рабочего хода крыльевых систем.
Устройство состоит из двух крыльевых систем, связанных с наземной платформой тросами, передающими механическую нагрузку на барабаны коробки передач, связанной с валом электрогенератора; направляющего троса, верхний конец которого прикреплён к аэростату, причём на направляющем тросе установлены механические маркеры, определяющие длину рабочего хода для каждой крыльевой системы, а барабаны коробки передач оборудованы устройствами регулирования длины тросов, связанных с крыльевыми системами; на каждой из крыльевых систем установлены механические устройства для изменения угла атаки крыла на нижнем и верхнем конце рабочего хода системы, причём каждое из этих устройств приводится в действие аэродинамическими силами, воздействующими на соответствующую крыльевую систему.
Недостатками вышеописанных способа и устройства являются:
– недостаточно высокая эффективность преобразования энергии за счет того, что отсутствует оптимизация величины угла атаки крыла в зависимости от скорости ветра;
– отсутствует автоматическое управление положением в пространстве и устойчивостью движения системы;
– конструкция крыла, состоящая из ряда надувных секций, подкреплённых тросами, не позволяет достичь высокого аэродинамического качества;
– механические устройства для изменения угла атаки крыла усложняют конструкцию системы и снижают аэродинамическое качество крыла.
Технической задачей, решаемой в предлагаемом изобретении, является повышение эффективности преобразования энергии ветровых и термических потоков и расширение функциональных возможностей устройства для преобразования ветровой энергии.
Технический результат достигается за счет того, что в известном способе преобразования энергии ветровых и термических потоков воздуха в тропосфере на средних высотах с помощью устройства в виде двух привязных планеров, связанных тросами с электрогенератором, установленным на наземной платформе, выполняют следующие операции:
– на нижнем и верхнем планере измеряют скорости горизонтальной и вертикальной составляющих воздушного потока, вычисляют результирующую скорость воздушного потока и угол наклона её к горизонту; при недостаточной или при слишком большой величине результирующей скорости воздушного потока производят изменение рабочей высоты, регулируя одновременно длину тросов для нижнего и верхнего планера;
– с помощью аэродинамических рулей устанавливают нижний планер на максимально допустимый угол атаки относительно результирующей скорости воздушного потока, одновременно устанавливают верхний планер на такой отрицательный угол атаки относительно результирующей скорости воздушного потока, который обеспечивает нулевую подъёмную силу верхнего планера;
– для данных значений результирующей скорости воздушного потока и угла атаки вычисляют теоретически оптимальное значение скорости перемещения нижнего планера относительно наземной платформы; измеряют фактическую скорость перемещения нижнего планера относительно наземной платформы и, регулируя величину угла атаки нижнего планера, добиваются максимального значения генерируемой мощности; запоминают фактические оптимальные значения скорости перемещения нижнего планера относительно наземной платформы и его угол атаки для данной результирующей скорости воздушного потока;
– при достижении заданного значения перемещения нижнего планера относительно наземной платформы производят с помощью аэродинамических рулей изменение его угла атаки на отрицательный, равный тому значению, что было прежде установлено для верхнего планера, и одновременно устанавливают верхний планер на угол атаки, который был определён прежде для нижнего планера, затем весь цикл повторяют. Для реализации этого способа используется устройство, описанное ниже.
Указанный технический результат достигается за счет того, что в предлагаемом устройстве, содержащем аэродинамические крыльевые системы, связанные тросами с электрогенератором, установленном на наземной платформе, аэродинамические крыльевые системы выполнены в виде идентичных привязных планеров, которые размещены на разной высоте и снабжены аэростатическими баллонами, установленными на конце крыла каждого из планеров. В центре тяжести каждого планера установлен карданный узел, к которому присоединен трос, соединяющий планер с соответствующим этому планеру механизмом наземной платформы. В конструкции нижнего планера выполнено отверстие, через которое пропущен трос верхнего планера, каждый трос снабжен роликовыми подпружиненными направляющими для прохождения троса другого планера. Вал электрогенератора соединён с двумя механизмами, оборудованными преобразователями направления вращения и регуляторами длины тросов, один из которых связан с тросом нижнего планера, а второй, соответственно, с тросом верхнего планера. Каждый привязной планер оборудован традиционной системой управления подъёмной силой и положением планера в пространстве по тангажу, крену и рысканию, на планерах установлены высотомер, датчики скорости воздушного потока, как горизонтального, так и вертикального, а также средства телекоммуникации. Трос, соединяющий привязной планер с соответствующим механизмом наземной платформы, присоединен к карданному узлу через цилиндрический демпфер. Вал электрогенератора соединён с двумя механизмами, оборудованными преобразователями направления вращения и регуляторами длины тросов, через редуктор и маховое колесо. Привязные планеры могут быть выполнены с несколькими планами крыльев, например с двумя или тремя (биплан или триплан). Традиционная система управления подъёмной силой и положением планера в пространстве по тангажу, крену и рысканию содержит аэродинамические рули, элероны, средства механизации крыла, акселерометры, гироскопы. Трос, соединяющий привязной планер с соответствующим механизмом наземной платформы, присоединен к карданному узлу через цилиндрический демпфер.
Предложенный способ преобразования энергии ветровых и энергетических потоков воздуха на средних высотах в тропосфере и устройство для его осуществления позволяют, во-первых, обеспечить максимальную эффективность преобразования энергии ветра для любой заданной скорости ветра и высоты над уровнем моря, за счет того, что крыло устанавливается на оптимальный угол атаки в каждый момент времени и при этом максимально используется энергия восходящих потоков воздуха, во-вторых, расширить функциональные возможности за счет того, что устройство автоматически находит оптимальную по скорости ветра рабочую высоту. Кроме того, устройство может быть размещено на грузовике или на плавсредстве и, следовательно, это обеспечивает мобильность устройству на суше и на море.
Изобретение поясняется следующими чертежами:
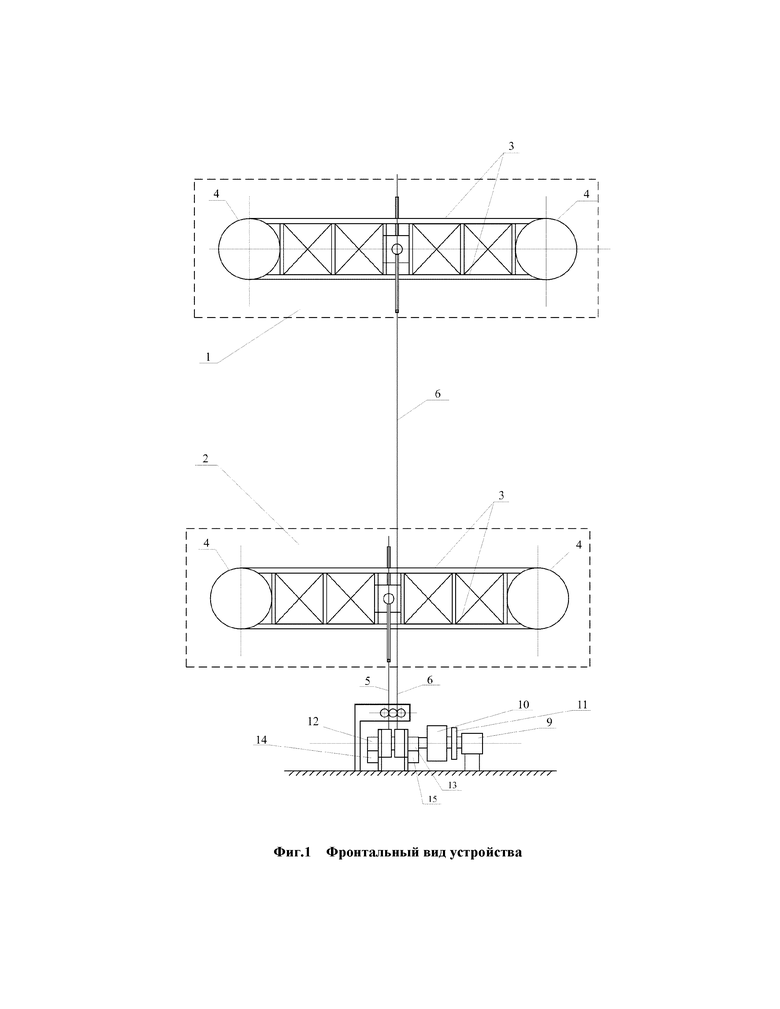
фиг.1 – фронтальный вид устройства;
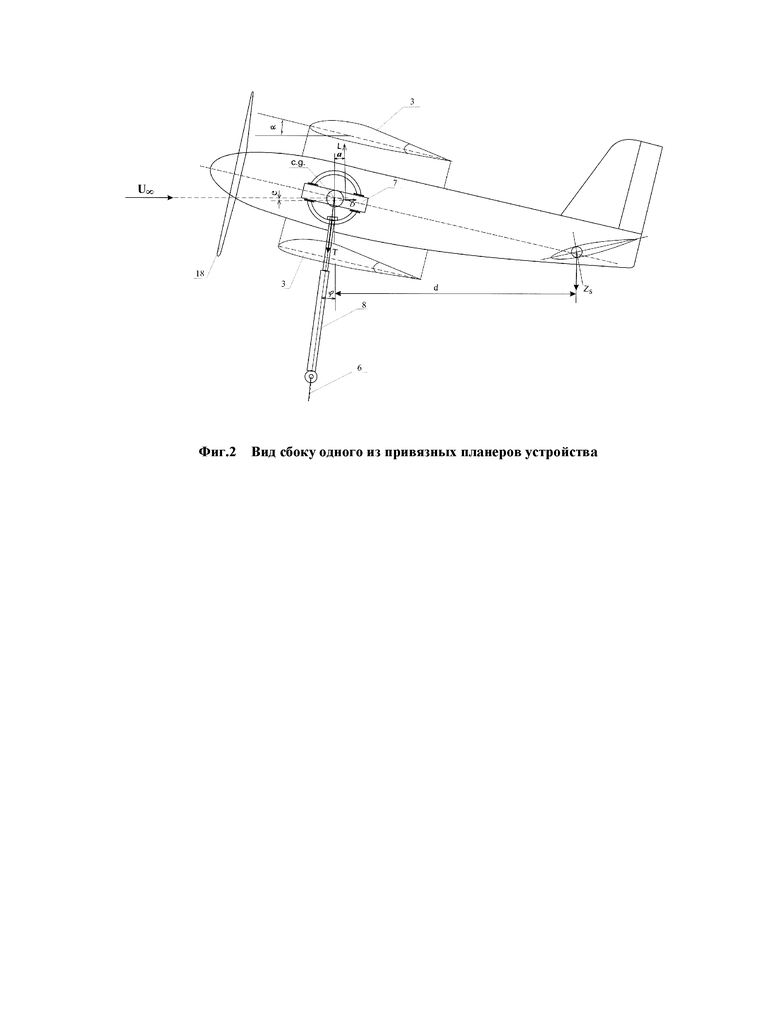
фиг.2 – вид сбоку одного из привязных планеров устройства;
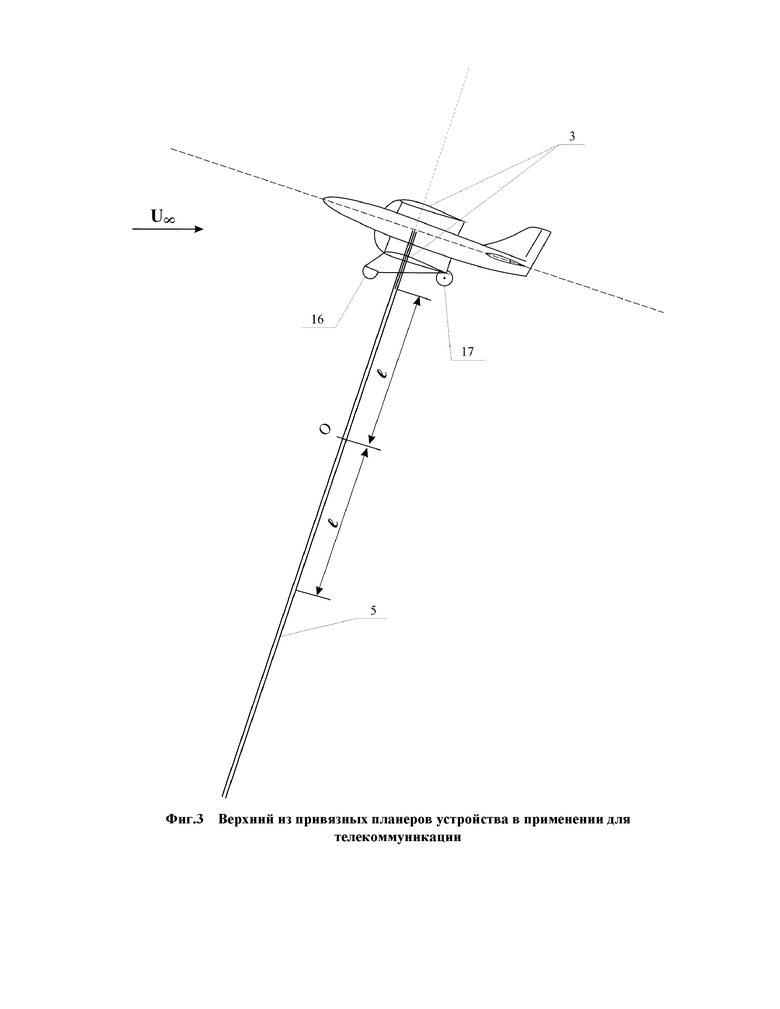
фиг.3 – верхний из привязных планеров устройства в применении для телекоммуникации;
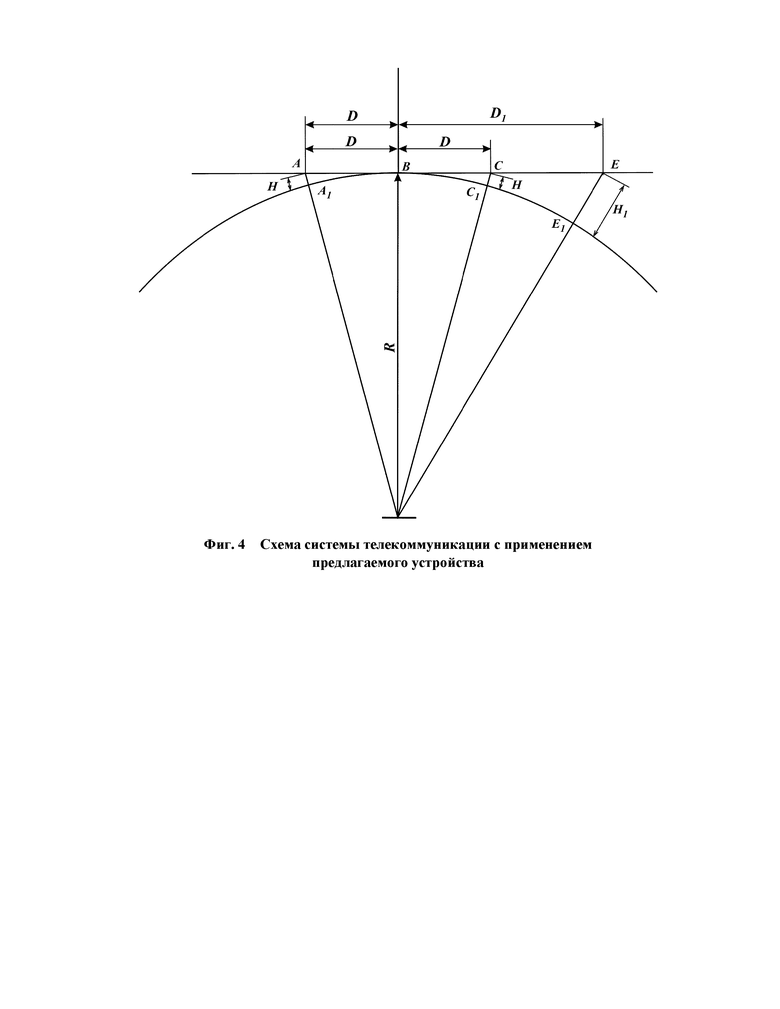
фиг.4 – схема системы телекоммуникации с применением предлагаемого устройства.
Фронтальный вид предлагаемого устройства представлен на фиг.1. Устройство содержит два идентичных привязных летательных аппарата 1 и 2 и наземную платформу. Каждый летательный аппарат состоит из планера 3 и аэростатических баллонов 4, установленных на концах крыла. Объём аэростатических баллонов выбран так, что они создают подъёмную силу, превышающую вес планера вместе с тросом на 5%. Это позволяет планерам при отсутствии ветра находиться в неподвижном состоянии на определённой высоте. При этом тросы 5 и 6, соединяющие планеры с наземной платформой будут иметь натяжение равное 5% веса планера вместе с тросом. Трос 6 верхнего планера проходит через отверстие в конструкции нижнего планера, где для этого троса имеются роликовые подпружиненные направляющие; на тросе 5 нижнего планера также установлены роликовые подпружиненные направляющие для прохождения троса 6 верхнего планера. На наземной платформе установлен вал электрического генератора 9, который соединён через редуктор 10 и маховое колесо 11 с двумя механизмами 12 и 13, оборудованными преобразователями направления вращения и регуляторами длины тросов 14, 15, один из которых связан с тросом 5 нижнего планера, а второй, соответственно, с тросом 6 верхнего планера. На наземной платформе также установлена центральная система управления с центральным процессором, который связан радиоканалом с локальными процессорами систем управления верхним и нижним планером. Центральная система управления включает средства измерения перемещения каждого планера с его тросом 5, 6 относительно наземной платформы, средства измерения приращения (или укорочения) длины каждого из тросов. Центральная система управления также включает электромеханические средства управления длиной каждого из тросов 14, 15, электромеханические средства переключения в конце рабочего хода планеров направления вращения механизмов 12, 13, приводящихся во вращение с помощью тросов нижнего и верхнего планера.
Наземная платформа имеет нижнюю неподвижную часть, которая может быть установлена на фундаменте, на грузовике или на плавсредстве. Верхняя часть может поворачиваться относительно нижней вокруг вертикальной оси и самоориентироваться по направлению ветра, так как ось колёс, принимающих тросы, смещена относительно центра вращения.
На фиг.2 показан вид сбоку верхнего планера. В центре тяжести планера расположен карданный узел 7, к которому через цилиндрический демпфер 8 прикреплён трос 6, соединяющий планер с наземной платформой. Нижний планер имеет идентичную конструкцию. Каждый планер может иметь несколько планов крыльев (биплан, триплан и т.д.). Оборудование планеров включает: традиционную систему управления подъёмной силой и положением в пространстве (по тангажу, крену и рысканию); высотомер и датчики скорости воздушного потока, как горизонтального, так и вертикального. Традиционная система управления подъёмной силой и положением в пространстве состоит из аэродинамических рулей, элеронов, средств механизации крыла, акселерометров и гироскопов, подключенных к бортовому микроконтроллеру управления. Электропитание бортового микроконтроллера осуществляется за счет преобразования энергии ветра малой ветротурбиной с винтом 18.
Рассмотрим последовательность операций, которые обеспечивают работу устройства.
Прежде всего, на нижнем и верхнем планере измеряют скорости горизонтальной и вертикальной составляющих воздушного потока. Результирующую скорость воздушного потока и угол наклона результирующей скорости к горизонту вычисляют по формулам:
 ,
,
 ,
,
где  – результирующая скорость воздушного потока;
– результирующая скорость воздушного потока;
 – скорость горизонтальной составляющей воздушного потока;
– скорость горизонтальной составляющей воздушного потока;
 – скорость вертикальной составляющей воздушного потока;
– скорость вертикальной составляющей воздушного потока;
 – угол наклона результирующей скорости к горизонту.
– угол наклона результирующей скорости к горизонту.
При недостаточной (менее 3 м/сек) или при слишком большой (более 30 м/сек) величине результирующей скорости воздушного потока производят изменение рабочей высоты, регулируя одновременно длину тросов для нижнего и верхнего планера. С помощью аэродинамических рулей устанавливают нижний планер на максимально допустимый угол атаки относительно результирующей скорости воздушного потока:
 , где
, где
 – максимально допустимый угол атаки относительно скорости воздушного потока;
– максимально допустимый угол атаки относительно скорости воздушного потока;
 – угол наклона хорды крыла к горизонту;
– угол наклона хорды крыла к горизонту;
– угол наклона результирующей скорости к горизонту.
Одновременно устанавливают верхний планер на такой отрицательный угол атаки относительно результирующей скорости воздушного потока, который обеспечивает нулевую подъёмную силу верхнего планера. Для данных значений результирующей скорости воздушного потока и угла атаки вычисляют теоретически оптимальное значение скорости  перемещения нижнего планера относительно наземной платформы. Это значение можно определить из условия максимума генерируемой планером механической мощности
перемещения нижнего планера относительно наземной платформы. Это значение можно определить из условия максимума генерируемой планером механической мощности
 , где
, где
W – генерируемая планером механическая мощность;
 подъёмная сила, создаваемая крыльями биплана;
подъёмная сила, создаваемая крыльями биплана;
 оптимальное значение скорости перемещения нижнего планера относительно наземной платформы.
оптимальное значение скорости перемещения нижнего планера относительно наземной платформы.
 , где
, где
℘ - массовая плотность воздуха;
– результирующая скорость воздушного потока;
 суммарная площадь крыльев биплана;
суммарная площадь крыльев биплана;
 коэффициент подъёмной силы при нулевом угле атаки;
коэффициент подъёмной силы при нулевом угле атаки;
 производная коэффициента подъёмной силы по углу атаки;
производная коэффициента подъёмной силы по углу атаки;
 ;
;
 ;
;
Условие максимума  :
:
 ;
;
 =0.
=0.
Отсюда получают следующее соотношение для оптимального значения :
 .
.
Затем производят измерение фактической скорости перемещения нижнего планера относительно наземной платформы и одновременно измеряют усилия на тросах и генерируемую электрическую мощность. Производят регулирование величины угла атаки нижнего планера до достижения максимума генерируемой мощности; запоминают фактические оптимальные значения скорости перемещения нижнего планера относительно наземной платформы и его угол атаки для данной результирующей скорости воздушного потока, а также усилие на тросе. Учитывая, что усилие на тросе равно подъёмной силе планера, можно определить коэффициент полезного действия при преобразовании генерируемой механической энергии в электрическую. При достижении заданного значения перемещения нижнего планера относительно наземной платформы производят с помощью аэродинамических рулей изменение его угла атаки на отрицательный, равный тому значению, что было прежде установлено для верхнего планера, и одновременно устанавливают верхний планер на угол атаки, который был определён прежде для нижнего планера.
Затем циклически повторяют описанные выше операции, изменяя в каждом цикле указанные в описании операций номера планеров. Планеры будут совершать возвратно-поступательное движение, во время которого расстояние между ними будет то увеличиваться, то уменьшаться.
Рассмотрим расчётные оценки электрической мощности, которую может генерировать предлагаемая система. Из приведенных выше формул следует, что мощность, отнесенная к одному квадратному метру суммарной площади крыльев биплана, равна:
 , где
, где
 .
.
Учитывая, что эффективный угол атаки крыла планера можно установить так, чтобы компенсировать вредное влияние и достичь максимальной величины  , можно получить следующие оценки для крыла с механизацией:
, можно получить следующие оценки для крыла с механизацией:

 ;
;
 .
.
Площадь крыла равна:
 , где
, где
 – площадь крыла;
– площадь крыла;
 размах крыла;
размах крыла;
λ – удлинение крыла.
Принимая λ = 8 и КПД устройств преобразования механической мощности в электрическую равный 85%, получают следующие величины для размаха крыла, подъёмной силы крыла и генерируемой электрической мощности (таблица 1):
Таблица 1. Оценочные значения мощности крыла с механизацией
(b, м)
(L, кг)
(W, кВт)
Из приведенных данных таблицы 1 следует, что предлагаемые метод и устройство при тех же габаритных размерах, что и для других устройств, дают возможность производить, как минимум, в два раза больше мощности, чем традиционные ветротурбины. При этом могут быть эффективно использованы вертикальные воздушные потоки, что невозможно в других видах устройств. Величина подъёмной силы позволяет закреплять наземную платформу устройства на грузовике. Наличие на планере «самолётной» системы управления и стабилизации положения в пространстве обеспечивает устойчивость и управляемость планера в ветровых потоках при наличии турбулентности.
Заявляемое устройство также может быть использовано для целей телекоммуникации и наблюдения за территорией. Для этой цели на борту одного или двух планеров должны быть установлены соответствующие радиопередатчики и приёмники с их антеннами (16, 17, см. фиг.3), а также гиростабилизированные видеокамеры, лазерные дальномеры и устройства лазерной подсветки. Электропитание всей этой аппаратуры осуществляется за счет преобразования энергии ветра малой ветротурбиной (18, см. фиг.2) с горизонтальной осью вращения, расположенной в носовой части каждого планера. Другой вариант бортового электроснабжения может осуществляться передачей электроэнергии с наземной платформы на планеры по проводам вдоль тросов.
Фиг.4 иллюстрирует схему организации высокоскоростной передачи данных с использованием радиосигналов сверхвысоких частот, распространяющихся прямолинейно в пределах прямой видимости. На фиг.4 имеются следующие обозначения: R – радиус Земли, наземная платформа устройства расположена в точке  , планер с аппаратурой передачи данных расположен на высоте H в точке А. Линия ABCЕ – это линия прямой видимости, которая является касательной к окружности Земли в точке В. Обозначим D максимальное расстояние вдоль линии прямой видимости между точкой А на высоте Н и точкой В на уровне Земли (таблица 2).
, планер с аппаратурой передачи данных расположен на высоте H в точке А. Линия ABCЕ – это линия прямой видимости, которая является касательной к окружности Земли в точке В. Обозначим D максимальное расстояние вдоль линии прямой видимости между точкой А на высоте Н и точкой В на уровне Земли (таблица 2).
Таблица 2. Зависимость дальности связи от высоты расположения ретранслятора
(H, м)
(D, км)
Точка С расположена на той же высоте Н, что и точка А. Допустим, что в этой точке находится второе такое же устройство телекоммуникации. Тогда максимальная дистанция передачи по линии прямой видимости возрастёт в два раза. Принимая во внимание, что ширина Адриатического моря изменяется от 90 км до 200 км, можно заключить, что с помощью двух или трёх описанных выше устройств (размещённых на плавсредствах) можно обеспечить высокоскоростную передачу данных для судов и яхт от одного берега до другого. Допустим, что в точке Е на высоте Н1 находится самолёт. Ниже в таблице 3 приведены значения расстояния по линии прямой видимости D1 в зависимости от высоты Н1.
Таблица 3. Зависимость возможной дальности связи с самолетом в полете
(H1, м)
(D1, км)
Из данных таблицы 3 следует, что предлагаемое устройство может быть использовано для управления беспилотными аппаратами на дальнем расстоянии и для приёма информации от этих аппаратов.
Литература
1. Cristina Archer and Ken Caldiera. Global Assesment for High Altitude Wind Power//Energies 2009, 2(2), 307-319; DOI:10.3390/en20200307.
2. Tony Burton (et all). Wind Energy Handbook. – Wiley and Sons, 2001. DOI:10.1002/0470846062.
3. Bryan Roberts (et all). Harnessing High Altitude Wind Power//IEEE Transactions on Energy conversion, Vol.22, No1, March 2007, http://dariopiga.com/Papers/Journal/TECKite2010.pdf.
4. Miles L.Loyd. Crosswind Kite Power // J.Energy, Vol.4, No3, article № 80-4075 http://www.energykitesystems.net/OrthoKiteBunch/OptimizationOfAManualFlygen.pdf.
5. M.Canale, L.Faggiano and M.Milanese. High Altitude Wind Energy Generation Using Controlled Power Kites// IEEE Transactions on Control Systems Technology, 2010. http://dariopiga.com/Papers/Journal/TECKite2010.pdf.
6. Maxim Ahmed, Ahmad Hably, Seddik Bacha. High Altitude Wind Power Systems: A survey on flexible Power Kites // XXth International Conference on Electrical Machines (ICEM'2012),Sep 2012, Marseille, France. pp.2083-2089. https://hal.archives-ouvertes.fr/file/index/docid/733723/filename/2083-ff-007498.pdf.
7. European Patent EP 158174 3B1, дата приоритета: 08.10.2003, опубликован 17.01.2007, http://worldwide.espacenet.com/publicationDetails/originalDocument?FT=D&date=20070117&DB=&locale=en_EP&CC=EP&NR=1581743B1&KC=B1&ND=1.
8. Pavel Miodushevsky. New efficient systems for conversion of the wind and water flow energy in electrical energy. // Paper presented at the 6th International Energy Conversion Engineering Conference, IECEC, 2008. – AIAA paper/AIAA-2008-5613.
Изобретение относится к области возобновляемых источников энергии и предназначено для использования в ветроэнергетике. Способ, реализуемый с помощью устройства, основан на оптимальном управлении углом атаки крыла каждого из привязных планеров с целью максимизации генерируемой электрической мощности в зависимости от скорости ветра, а также на динамическом управлении положением привязного планера в пространстве для обеспечения устойчивости движения системы. Предлагаемое устройство содержит идентичные привязные планеры, расположенные на разной высоте и связанные тросами друг с другом и электрогенератором, установленным на наземной платформе. На каждом планере размещены аэростатические баллоны, карданный узел, соединенный с механизмами наземной платформы, оборудованными преобразователями направления вращения и регуляторами длины тросов. Планеры снабжены традиционной системой управления подъёмной силой и положением планера в пространстве, высотомерами, датчиками скорости воздушного потока, средствами телекоммуникации. Кроме того, устройство может быть размещено на грузовике или на плавсредстве и, следовательно, это обеспечивает мобильность устройству на суше и на море. Техническим результатом изобретения является повышение эффективности преобразования энергии ветровых и термических потоков и расширение функциональных возможностей устройства для преобразования ветровой энергии. 2 н. и 5 з.п. ф-лы, 4 ил., 3 табл.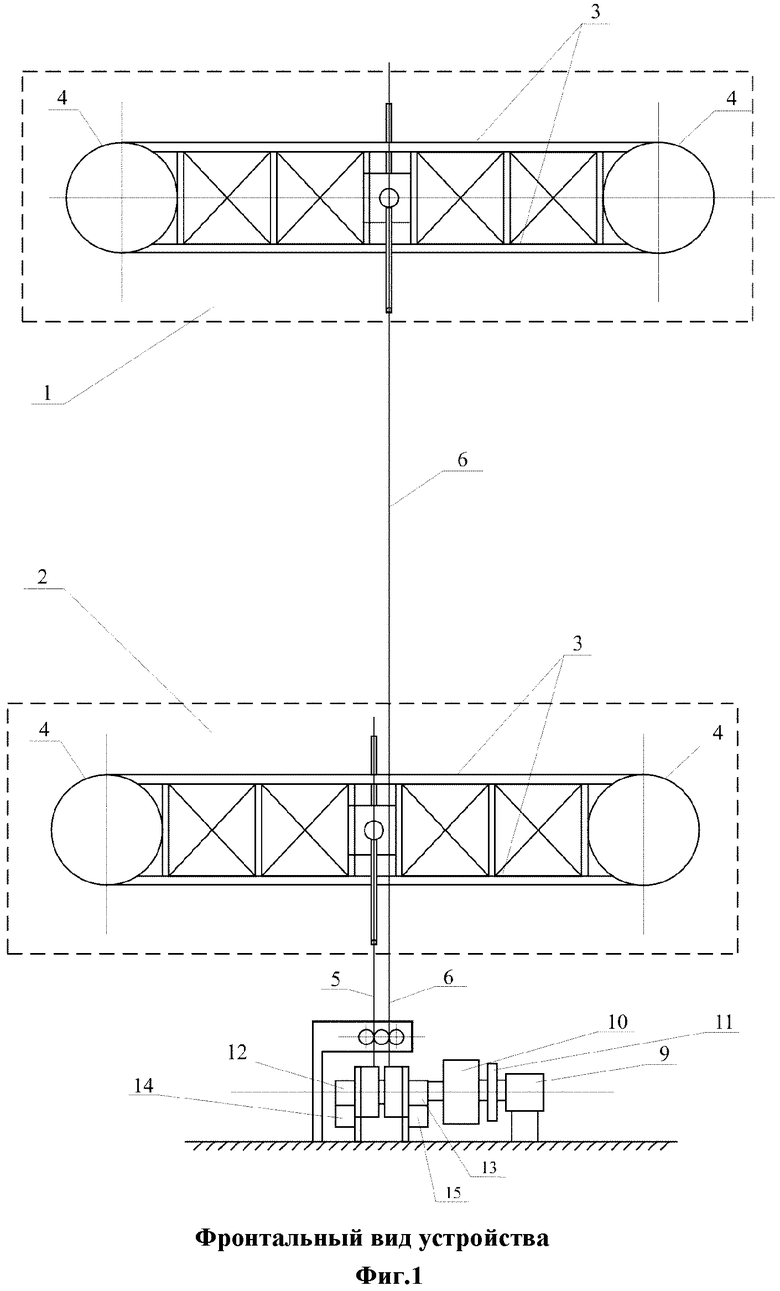
1. Способ преобразования энергии ветровых и термических потоков воздуха в тропосфере на средних высотах, осуществляемый с помощью устройства в виде двух привязных планеров, связанных тросами с наземной платформой электрогенератора, отличающийся тем, что на нижнем и верхнем планере измеряют скорости горизонтальной и вертикальной составляющих воздушного потока, вычисляют результирующую скорость воздушного потока и угол наклона её к горизонту, при недостаточной или при слишком большой величине результирующей скорости воздушного потока производят изменение рабочей высоты, регулируя одновременно длину тросов для нижнего и верхнего планера, затем с помощью аэродинамических рулей устанавливают нижний планер на максимально допустимый угол атаки относительно результирующей скорости воздушного потока, одновременно устанавливают верхний планер на такой отрицательный угол атаки относительно результирующей скорости воздушного потока, который обеспечивает нулевую подъёмную силу верхнего планера, для данных значений результирующей скорости воздушного потока и угла атаки вычисляют теоретически оптимальное значение скорости перемещения нижнего планера относительно наземной платформы; измеряют фактическую скорость перемещения нижнего планера относительно наземной платформы и, регулируя величину угла атаки нижнего планера, добиваются максимального значения генерируемой мощности, запоминают фактические оптимальные значения скорости перемещения нижнего планера относительно наземной платформы и его угол атаки для данной результирующей скорости воздушного потока; при достижении заданного значения перемещения нижнего планера относительно наземной платформы с помощью аэродинамических рулей, производят изменение его угла атаки на отрицательный, равный тому значению, что было прежде установлено для верхнего планера, и одновременно устанавливают верхний планер на угол атаки, который ранее был определён для нижнего планера, затем весь цикл повторяют.
2. Устройство преобразования энергии ветровых и термических потоков воздуха на средних высотах в тропосфере, содержащее аэродинамические крыльевые системы, связанные тросами с электрогенератором, установленным на наземной платформе, отличающееся тем, что аэродинамические крыльевые системы выполнены в виде идентичных привязных планеров, которые размещены на разной высоте и снабжены аэростатическими баллонами, установленными на конце крыла каждого из планеров, в центре тяжести каждого планера установлен карданный узел, к которому присоединен трос, соединяющий планер с соответствующим этому планеру механизмом наземной платформы, кроме того, в конструкции нижнего планера выполнено отверстие, через которое пропущен трос верхнего планера, каждый трос снабжен роликовыми подпружиненными направляющими для прохождения троса другого планера, а вал электрогенератора соединён с двумя механизмами, оборудованными преобразователями направления вращения и регуляторами длины тросов, один из которых связан с тросом нижнего планера, а второй, соответственно, с тросом верхнего планера, каждый привязной планер оборудован традиционной системой управления подъёмной силой и положением планера в пространстве по тангажу, крену и рысканию, на планерах установлены высотомер, датчики скорости воздушного потока, а также средства телекоммуникации.
3. Устройство по п.2, отличающееся тем, что привязные планеры могут быть выполнены с несколькими планами крыльев, например, с двумя или тремя.
4. Устройство по п.2, отличающееся тем, что традиционная система управления подъёмной силой и положением планера в пространстве по тангажу, крену и рысканию снабжена аэродинамическими рулями, элеронами, средствами механизации крыла, акселерометрами, гироскопами.
5. Устройство по п.2, отличающееся тем, что трос, соединяющий привязной планер с соответствующим механизмом наземной платформы, присоединен к карданному узлу через цилиндрический демпфер.
6. Устройство по п.2, отличающееся тем, что вал электрогенератора, установленного на наземной платформе, соединён через редуктор и маховое колесо с двумя механизмами, оборудованными преобразователями направления вращения и регуляторами длины тросов.
7. Устройство по п.2, отличающееся тем, что датчики скорости воздушного потока, установленные на планере, могут быть как для горизонтального, так и для вертикального воздушного потока.
| Способ определения активности ингибиторов нитрификации аммонийного азота в почве | 1988 |
|
SU1581743A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВЕТРОВОЙ ЭНЕРГИИ В МЕХАНИЧЕСКУЮ | 2011 |
|
RU2473820C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕОБРАЗОВАНИЯ СОДЕРЖАЩЕЙСЯ В ГОРИЗОНТАЛЬНЫХ ПОТОКАХ ЭНЕРГИИ ДВИЖЕНИЯ В ПОЛЕЗНУЮ МЕХАНИЧЕСКУЮ ЭНЕРГИЮ | 2008 |
|
RU2483226C2 |
| АЭРОСТАТ ВЕТРОЭНЕРГЕТИЧЕСКИЙ | 2017 |
|
RU2662101C1 |
| ВЫСОТНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2003 |
|
RU2261361C2 |
| АЭРОСТАТНО-ПЛАВАТЕЛЬНЫЙ ВЕТРОГЕНЕРАТОР | 2015 |
|
RU2576103C1 |
| CN 101469675 A, 01.07.2009. | |||

