Настоящее изобретение относится к ветровой системе, предназначенной для преобразования энергии посредством, по меньшей мере, одного силового профиля крыла. Настоящее изобретение, кроме того, относится к способу вырабатывания энергии посредством такой системы, а также к применению этой системы для буксирования судна.
Как известно, в прошлом проблему вырабатывания электроэнергии с малыми затратами решали посредством эксплуатации возобновляемых источников энергии; в частности, в некоторых известных патентах, описанных ниже, предложены способы преобразования энергии ветра, а также различные устройства, которые отбирают энергию ветра посредством силовых профилей крыла (обычно именуемых термином «воздушный змей»).
В частности, в патенте США 4124182 раскрыто устройство, оснащенное «воздушным змеем» (или «модифицированным парашютом») для улавливания энергии ветра и ее преобразования во вращательное движение вала, который приводит в действие генератор. Это устройство отличается парой «цепочек воздушного змея», в котором профили крыла расположены последовательно. Каждая цепочка обеспечена силовым тросом. Такие тросы имеют достаточную длину, чтобы обеспечивать возможность достижения цепочками воздушного змея высот, на которых дуют более сильные и более равномерные ветры по отношению к тем ветрам, которые дуют на уровне поверхности земли. Каждая цепочка посредством ее соответствующего силового троса связана с барабаном или лебедкой, направление вращения которой может быть изменено, чтобы выполнить повторную намотку тросов или обеспечить возможность разматывания тросов вследствие тяги, создаваемой ветровыми потоками. Каждая цепочка воздушного змея снабжена вторым тросом, называемым «тросом колпака», соединенным с каждым профилем крыла цепочки, посредством которого можно избирательно складывать воздушный змей для облегчения процесса повторной намотки. Через редуктор вращательное движение каждой лебедки будет передано к генератору, который, когда он приведен в действие, вырабатывает электроэнергию. Имеется одиночная система шкивов, которая через сцепления и колеса обеспечивает возможность того, чтобы, когда цепочка воздушного змея набирает высоту, другая цепочка возвращалась. При этом улавливаемая ветровая энергия будет преобразована в механическую энергию, которая частично сразу же будет израсходована для возврата цепочки воздушного змея, колпак которого будет сомкнут, и частично она будет преобразована в электрическую энергию. Посредством аэростатического шара, связанного с каждой цепочкой, который при каждом рабочем цикле надувают и спускают, воздушные змеи удерживают на желаемой высоте, при этом колпак находится в фиксированной ориентации.
В китайском патенте CN 1052723 раскрыт ветровой генератор, оснащенный парой воздушных змеев, посредством которых тяга, создаваемая потоками, обусловленными деятельностью ветра, будет преобразована с помощью тросов, обладающих высокой стойкостью, во вращение барабана, расположенного на уровне земли. Лебедка приводит в действие гидравлический двигатель, посредством которого происходит вырабатывание тока.
В патенте Великобритании GB 2317422 раскрыто устройство, оснащенное большим количеством профилей крыла, которые благодаря действию ветра вращают вертикальный вал, соединенный с генератором для вырабатывания электрического тока. Профили крыла воспринимают толкающее их ветровое воздействие, совершая при этом круговой путь в горизонтальной плоскости. Каждый профиль оснащен устройством, которое способно изменять угол привязки к ветру, чтобы гарантировать продолжение полета.
В патенте Соединенных Штатов US 6072245 раскрыто устройство для использования энергии ветра, составленное из большого количества воздушных змеев, соединенных с тросами, которые образуют кольцо. Воздушные змеи приводят в движение, чтобы чередовать путь восхождения и путь опускания, определяя вращательное кольцевое движение всегда вдоль одного и того же направления. Каждый воздушный змей соединяют с силовым тросом для передачи механической энергии и с системой приводных тросов для регулирования угла привязки к ветру каждого профиля. Силовой трос определяет вращение шкивов, посредством которого происходит вырабатывание электрической энергии. Приводные тросы используют для возможности принятия каждым воздушным змеем положения, которое на пути восхождения позволяет тянуть профиль крыла вверх посредством ветра, и второго положения на пути опускания, так что профиль крыла будет подвергнут пониженному ветровому напору.
В патенте Соединенных Штатов US 6254034 раскрыто устройство, оснащенное профилем крыла («привязной летательный аппарат»), толкаемым ветровыми потоками с контролируемой скоростью, чтобы использовать ветровую энергию. Профиль крыла соединяют посредством троса с лебедкой, которая приводит в действие генератор для вырабатывания электрической энергии. На панели профиля собрана приводная система, которая обнаруживает и изменяет угол привязки к ветру, а также изменяет переднюю площадь, перекрываемую ветром. Такой системой с земли управляет оператор, который считывает на дисплее данные, передаваемые от соответствующих датчиков, либо это происходит автоматически посредством дистанционной системы управления. Воздушный змей приводят в действие, чтобы обеспечить его восхождение по ветру с высоким углом привязки к ветру. После окончания его восхождения угол привязки уменьшают, и профиль планирует для его прохождения против ветра. Профиль возвращается, вновь планируя по ветру, и цикл повторяется.
В голландском патенте NL 1017171 C раскрыто устройство, подобное ранее описанному устройству, но в котором не обеспечен ручной режим приведения в действие, и в котором возврат профиля крыла происходит посредством наклона воздушного змея, как флага, чтобы свести к минимуму напор, вызываемый действием ветра, при обратной намотке тросов.
В патенте Соединенных Штатов US 6523781 раскрыто устройство, состоящее из профиля крыла («аэродинамический воздушный змей»), посредством которого улавливают энергию, создаваемую деятельностью ветра, имеющего входной край, выходной край и два боковых края. Такой профиль приводят в действие посредством механизма, удерживаемого самим воздушным змеем. Это устройство снабжено тросами, соединенными с краями профиля, при этом воздушный змей приводят в действие, изменяя посредством таких тросов угол тангажа. Приводной механизм питают посредством электрических кабелей, расположенных внутри силового троса, который соединяет воздушный змей с лебедкой, которая приводит в действие генератор для вырабатывания электроэнергии. Профиль крыла набирает высоту, толкаемый ветром посредством использования подъемной силы, и описывает путь, почти перпендикулярный направлению скорости ветра. После окончания набора высоты воздушный змей возвращается, после чего его приводят в движение, чтобы вновь улавливать ветер.
В заявке на патент Соединенных Штатов US 2005046197 раскрыто устройство, оснащенное профилем крыла («воздушный змей») для использования энергии, создаваемой ветром, которое вырабатывает электроэнергию посредством приведения в действие с помощью тросов лебедки, соединенной с генератором. Воздушный змей приводят в действие посредством дополнительных тросов, с помощью которых изменяют угол привязки к ветру. Профиль набирает высоту при высоком угле привязки к ветру. После завершения набора высоты угол привязки к ветру доводят до минимума и профиль возвращают для того, чтобы вновь начать цикл.
Анализируя существующий уровень техники, можно заметить, что в известных системах механические компоненты для приведения в действие воздушного змея отличаются от компонентов для вырабатывания энергии, и профили крыла приводят в действие с помощью механизмов, которые непосредственным образом устанавливают на воздушный змей, либо с помощью, по меньшей мере, четырех вспомогательных тросов, разматывание и повторное наматывание которых осуществляют посредством лебедок, отличающихся от лебедок, используемых для вырабатывания электроэнергии и управляемых посредством систем, расположенных на уровне земли или подвешенных над землей, следовательно, удерживаемых самим воздушным змеем.
Кроме того, во многих существующих системах профиль крыла приводят в действие, чтобы вырабатывать электроэнергию главным образом посредством использования лобового сопротивления (а именно, компонента напора, создаваемого действием ветра, который параллелен скорости ветра). В других системах цикл приведения в действие воздушного змея отличается непрерывным чередованием набора высоты, который происходит посредством использования подъемной силы (а именно, компонента напора, создаваемого ветром, который перпендикулярен скорости ветра), и опускания, которое происходит посредством доведения лобового сопротивления до минимума.
Кроме того, в существующих системах внимание сфокусировано исключительно на возможности непрерывного вырабатывания электроэнергии посредством циклического процесса, пренебрегая осуществлением возможных систем, обеспечивающих доведение до максимума энергии, которая может быть использована от действия ветра.
Далее осуществляемое в настоящее время вырабатывание электрического тока, исходя из ветровой энергии, происходит внутри установок посредством неподвижных устройств. Что касается использования этой возобновляемой энергии, то отсутствуют устройства, которые могут быть перемещены, и с помощью которых можно вырабатывать электрический ток в любом месте, в котором дует ветер. Подобная потенциальная возможность могла бы обеспечить огромные преимущества в тех случаях, в которых вырабатывание тока в настоящее время происходит исключительно посредством неразрывных групп (работающий на топливе двигатель и генераторы), например, в полевых госпиталях.
Однако в настоящее время проблемы, связанные с системой управления силовым профилем крыла, подробно решены в чрезвычайно ограниченном ряде проектов и исследований, при этом они главным образом сфокусированы на повышении производительности уже существующих систем вместо разработки новых систем для вырабатывания энергии.
В прошлом также были предложены различные устройства, относящиеся к буксированию судов посредством устройств, которые улавливают потоки, создаваемые ветром с помощью силовых профилей крыла.
В частности, в патенте Великобритании GB 2098951 раскрыто устройство для буксирования судов посредством цепочки силовых профилей крыла. Запуск профилей происходит, начиная с запуска пилотного профиля, который поднимает пару тросов, действующих в качестве направляющих для запуска других профилей. Направляющие тросы разматывают до тех пор, пока все силовые профили не достигнут требуемой высоты. Чтобы предотвратить колебание профилей при запуске, некоторые из них опускают или вытягивают перед развертыванием для улавливания потоков, создаваемых ветром. После того, как все силовые профили достигают приемлемой высоты, их подъем заканчивается, и пилотный профиль возвращают или тянут в трубку, предназначенную для хранения и расположенную в головной части цепочки силовых профилей крыла.
В патенте Соединенных Штатов US 5056447 раскрыто устройство для преобразования энергии, создаваемой действием ветра, в механическую энергию посредством системы, состоящей из парусов, расположенных на разных высотах, при этом их вогнутость ориентирована в нижнем направлении. Такое устройство ведет себя как силовой профиль крыла, подвергаемый тянущему воздействию посредством восходящих потоков, создаваемых действием ветра. Это устройство может быть применено для земного, водного или воздушного транспорта, на рельсах или для вырабатывания электрической энергии посредством вращательных лопаток, которые приводят в действие генератор.
В патенте Соединенных Штатов US 5435259 раскрыто устройство для использования ветровых потоков на большой высоте, чтобы вырабатывать электроэнергию или буксировать транспортные средства на земле или на воде. Пассажир на борту транспортного средства приводит в действие систему, состоящую из силовых профилей крыла, которая ведет себя как обычный планер. Транспортное средство, действующее как подвижный якорь, оснащено системой управления, предотвращающей опрокидывание, отличающейся управляющим тросом, намотанным вокруг центрального участка транспортного средства, и стержнем, который проходит поверх обеих сторон транспортного средства. Такой стержень выглядит как участок рельса, который толкает нижний конец троса, который крепит силовые профили к транспортному средству, вдаль от сторон, проходящих по ветру, тем самым позволяя избежать их опрокидывания. Система силовых профилей оснащена у ее верхнего конца цилиндрическими аэростатическими шарами для удерживания нагрузки, если дует недостаточный ветер. Такие шары на их концах дополнительно имеют ветряные турбины, посредством которых вырабатывают электроэнергию.
В международной заявке на патент WO 03097448 раскрыто устройство для буксирования судов посредством силового профиля крыла. Такое устройство оснащено, по меньшей мере, одним «контрольным тросом», посредством которого профиль крыла соединяют с корпусом судна. Место приложения силы, перемещаемое посредством контрольного троса (тросов) к корпусу судна, изменяется в зависимости от ветра вдоль направления продвижения судна. Такое место приложения силы фактически скользит внутри периметрической направляющей, смонтированной на корпусе судна, чтобы уменьшить крен.
В заявке на патент Соединенных Штатов US 2004035345 раскрыто устройство для приведения в действие силового профиля крыла, прикрепленного к судну посредством, по меньшей мере, пары «подвесных тросов». Инструмент управления профилем крыла содержит рельс, который проходит по горизонтали под поверхностью воды, и на котором смонтировано устройство для отклонения подвесных тросов, которое может скользить вдоль рельса. Такую направляющую связывают с корпусом судна между силовым профилем крыла и системой, посредством которой профиль приводят в действие, так что тяга, обеспечиваемая профилем крыла, создает момент вокруг продольной и/или поперечной оси судна в воде, посредством которого судно, расположенное по ветру, будет подвергнуто толкающему воздействию в верхнем направлении.
В заявке на патент Соединенных Штатов US 2004200396 раскрыты три способа, посредством которых можно создать осевое усилие у корпуса судна для гарантии его продвижения на поверхности воды. Первый способ состоит в расположении парусов на кормовой части и в их наклоне к ветру (снаружи судна), чтобы создать осевой напор. Второй способ состоит в использовании силового профиля крыла, прикрепленного на носу и приводимого в действие для его полета вверх и перед судном, создавая при этом тягу, которая продвигает судно. Третий способ состоит в использовании киля, оснащенного широкой плоской плитой, наклоненной вверх, чтобы продвигаться по воде, создавая осевой напор, который стремится приподнять корпус. В этом патенте также раскрыты вращающиеся паруса, изготовленные из полос ткани, которые проходят через раму, имеющую вид решетки. Эти паруса изготовлены для того, чтобы противодействовать потокам, создаваемым ветром, если на них будет оказано толкающее воздействие к решетке, и они обеспечивают прохождение ветра, когда последний дует вдоль противоположного направления, приводя к отходу полос ткани от рамы.
В международной заявке на патент WO 2005100147 раскрыто устройство для буксирования судов посредством силового профиля крыла, прикрепленного к корпусу посредством троса. Такое устройство используют в качестве применяемого в исключительных случаях вспомогательного или аварийного направляющего узла. Система оснащена лебедкой, которая содержит средства, с помощью которых трос повторно наматывают и разматывают. Повторное наматывание выполняют тогда, когда тяга на тросе недостаточна, либо когда скорость ветра резко уменьшается. Разматывание троса выполняют тогда, когда нагрузка на трос и/или скорость ветра чрезмерны.
В международной заявке на патент WO 2005100148 раскрыто устройство для буксирования судов посредством силового профиля крыла, прикрепленного к корпусу посредством троса. Такое устройство используют в качестве применяемого в исключительных случаях вспомогательного или аварийного узла. Профиль крыла приводят в действие посредством управляющего устройства, которое придает профилю направление, позволяя ему совершать движение по спиральным или синусоидальным траекториям, которые проходят вдоль вертикального направления по отношению к потокам, создаваемым ветром, при этом вектор скорости перпендикулярен скорости ветра. Различные траектории или статические условия полета выбирают посредством системы управления, принимая во внимание курс, направление и скорость ветра, и движение моря.
В международной заявке на патент WO 2005100149 раскрыто устройство для буксирования судов посредством силового профиля крыла. Такое устройство используют в качестве применяемого в исключительных случаях вспомогательного или аварийного узла. Профиль крыла соединяют с судном посредством троса, который выходит в виде разделки концов последовательности тросов вблизи от профиля крыла. Приводная система, удерживаемая посредством профиля крыла и соединяемая с ним, изменяет угол привязки к ветру, чтобы регулировать положение профиля крыла по отношению к судну.
В заявке на патент DE 102004018814 Германии раскрыто устройство для буксирования судов посредством силового профиля крыла, прикрепленного к корпусу посредством троса. Такой профиль может быть приведен в действие посредством аппарата, который может быть установлен по азимуту, и который может быть удержан самим профилем крыла, и посредством которого профилю придают направление с судна. Устройство также оснащено приемной системой, которая удерживает профиль крыла, когда система не приведена в действие, а также автоматически включаемыми устройствами, с помощью которых профиль опускают.
Поэтому цель настоящего изобретения заключается в решении указанных выше проблем известного уровня техники посредством создания ветровой системы для преобразования энергии посредством, по меньшей мере, одного силового профиля крыла, в которой механические компоненты профиля крыла для приведения его в действие не отличаются от компонентов для вырабатывания энергии.
Еще одна цель настоящего изобретения заключается в создании ветровой системы для преобразования энергии посредством, по меньшей мере, одного силового профиля крыла, в которой такой профиль приводят в действие посредством интеллектуальной системы управления, которая при каждом рабочем цикле обеспечивает прохождение профилем крыла оптимального пути, чтобы оптимизировать энергию, которая может быть отобрана у ветра.
Еще одна цель настоящего изобретения заключается в создании ветровой системы для преобразования энергии посредством, по меньшей мере, одного силового профиля крыла, в которой затруднения, связанные с ее компонентами, расположенными на земле, настолько ограничены, что их транспортирование возможно также с помощью обычного самоходного транспортного средства.
Кроме того, цель настоящего изобретения заключается в создании способа вырабатывания электрической энергии посредством ветровой системы согласно изобретению, которая может быть приведена в действие более эффективно по отношению к тому, что предложено в известном уровне техники.
Указанные выше и другие цели и преимущества изобретения, которые будут более понятны из последующего описания, достигнуты посредством ветровой системы для преобразования энергии посредством силового профиля крыла, которая заявлена в пункте 1 формулы изобретения.
Кроме того, приведенные выше и другие цели и преимущества изобретения достигнуты посредством способа вырабатывания электрической энергии посредством ветровой системы согласно настоящему изобретению, который заявлен в пункте 24 формулы изобретения.
Предпочтительные варианты осуществления и не очевидные изменения настоящего изобретения составляют существо зависимых пунктов формулы изобретения.
Настоящее изобретение будет лучше описано посредством некоторых предпочтительных вариантов его осуществления, представленных в качестве примера, не налагающего ограничений, со ссылками на прилагаемые фигуры, на которых:
на фиг.1 представлен вид в перспективе предпочтительного варианта осуществления компонента системы согласно настоящему изобретению;
на фиг.2 представлен еще один вид в перспективе компонента
согласно фиг.1;
на фиг.3а представлен вид в перспективе предпочтительного варианта осуществления еще одного компонента системы согласно настоящему изобретению в одном из его рабочих положений;
на фиг.3b представлен вид в перспективе компонента согласно фиг.3а в другом из его рабочих положений;
на фиг.4 представлен схематический вид системы согласно настоящему изобретению на некоторых из ее рабочих стадий;
на фиг.5 представлен схематический вид стационарной аэродинамической поверхности, погруженной в поток, обеспечиваемый ветром, и связанных с ней сил, которые будут созданы;
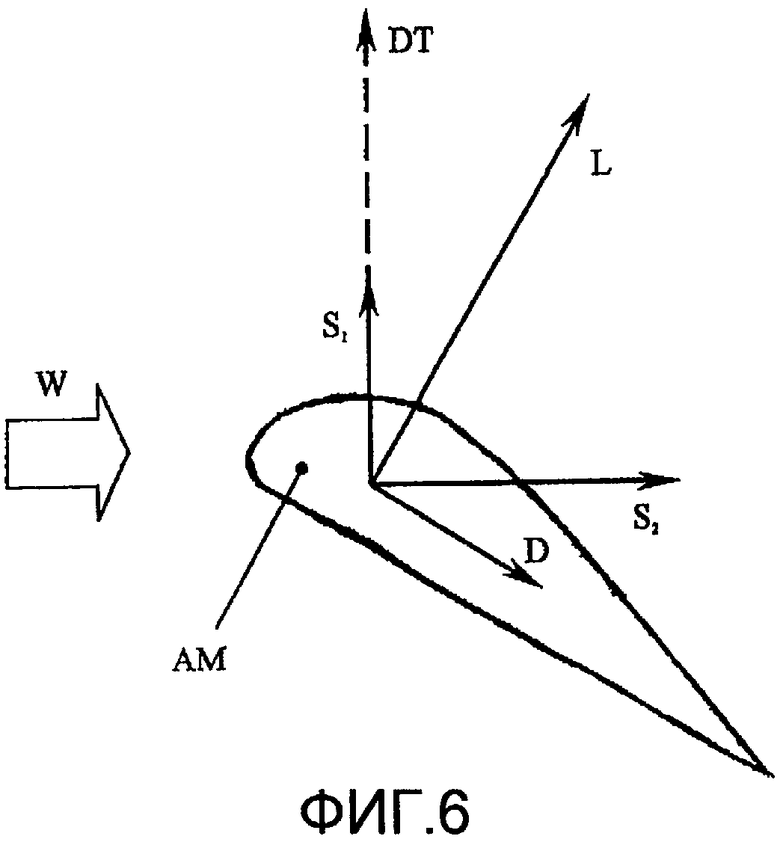
На фиг.6 представлен схематический вид аэродинамической поверхности, которая может свободно перемещаться вдоль перпендикулярного направления к скорости ветра, и связанных с ней сил, которые будут созданы;
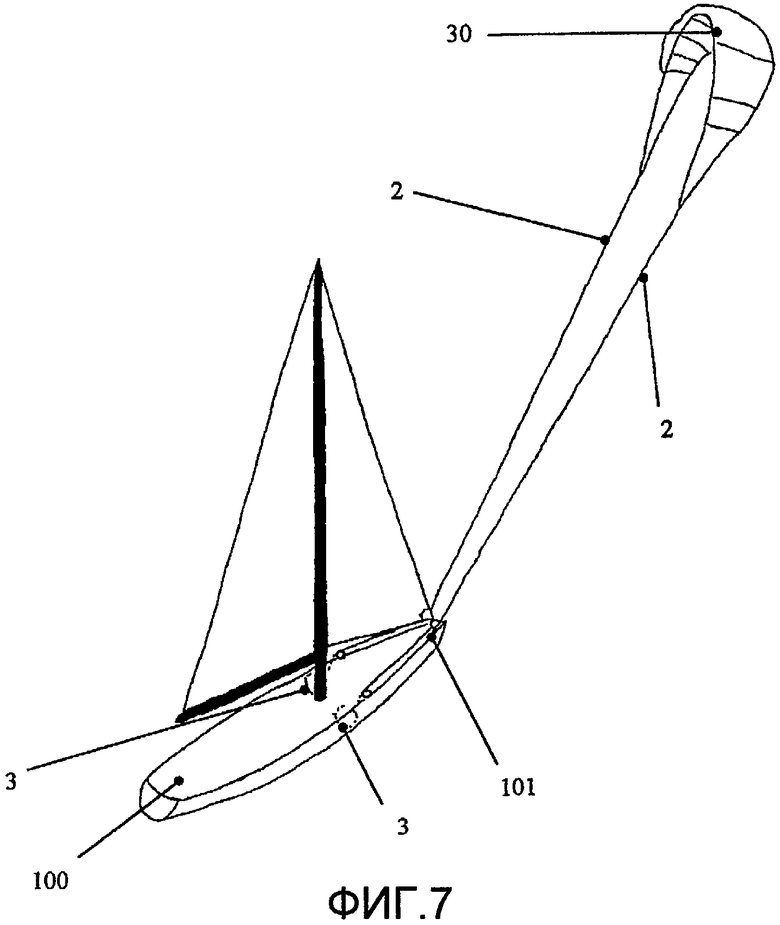
На фиг.7 представлен схематический вид в перспективе возможного применения системы согласно настоящему изобретению.
Если обратиться к фигурам, то можно заметить, что ветровая система согласно настоящему изобретению содержит:
по меньшей мере, один силовой профиль 30 крыла, который может быть приведен в действие с земли (далее для простоты он также будет называться термином «воздушный змей»), погруженный в ветровые потоки. Такой профиль крыла изготавливают посредством тканых волокон, обычно используемых для изготовления специальных парусов для определенных видов спортивной деятельности, например для занятий серфингом и картингом. Основной характеристикой, которая отличает воздушный змей, является площадь поверхности. Благодаря недавно проведенным исследованиям в области аэродинамики на рынке могут быть приобретены профили крыла, которые могут удовлетворять определенным требованиям в отношении управления ими и возможности приведения их в действие. Посредством соответствующего приведения профиля крыла в действие можно модулировать передачу энергии от ветра. В частности, можно направлять воздушный змей 30 по траектории полета, переводя его из положения, в котором тяга, оказываемая потоками, вызываемыми деятельностью ветра, в которые погружен профиль 30 крыла, максимальная, в положение, близкое к сваливанию (которое может находиться по азимуту или сбоку), в котором такая тяга минимальна. Посредством циклического чередования стадии максимальной тяги и стадии, близкой к сваливанию, и последующего возврата, будет происходить вырабатывание электрической энергии, что ниже будет описано более подробно;
базовую платформу 1, предназначенную для приведения в действие профиля 30 крыла и для преобразования энергии потока, вызываемого деятельностью ветра, в электрическую или механическую энергию, которая расположена на уровне земли и соединена посредством двух тросов 2 с силовым профилем 30 крыла, при этом два троса 2 предназначены для передачи сил от профиля 30 крыла и к нему, и оба из них используют для управления траекторией полета профиля 30 крыла и для передачи энергии способами, которые указаны далее. Это можно обеспечить для многих силовых профилей 30 крыла, последовательно соединенных друг с другом, чтобы суммировать силу тяги, прилагаемую к тросам 2. Профили 30 крыла фактически соединены с базовой платформой 1 посредством единой системы тросов 2. Для простоты далее будет сделана ссылка на тот случай, при котором ветровая система согласно настоящему изобретению снабжена одним профилем 30 крыла. Принцип работы ветровой системы согласно настоящему изобретению фактически не зависит от количества используемых профилей 30 крыла. Преимущество, получаемое от использования большого количества силовых профилей 30 крыла, заключается в увеличении поверхности ветрового фронта, пересекаемой такими профилями и, следовательно, в увеличении тяги на лебедках 3 и увеличении электрической энергии, которую можно вырабатывать при каждом рабочем цикле, что ниже будет описано более подробно.
Кроме того, система согласно настоящему изобретению содержит интеллектуальную систему управления, действующую на базовой платформе 1, посредством которой полет профиля 30 крыла происходит с автоматическим управлением, и систему 12 электроснабжения, взаимодействующую с интеллектуальной системой управления для контроля накапливания и подачи электрической энергии.
Интеллектуальная система управления взаимодействует с группой датчиков с автономным средством подачи, расположенной на профиле 30 крыла, которая направляет информацию предпочтительно беспроводным способом к находящимся на земле компонентам интеллектуальной системы управления. Интеллектуальная система управления объединяет эти части информации с другой информацией, поступающей от набора наземных датчиков (например, с величиной нагрузки на тросы, определяемой считыванием крутящего момента двигателя), и осуществляет обработку для автоматического приведения в действие профиля 30 крыла в течение всего рабочего цикла.
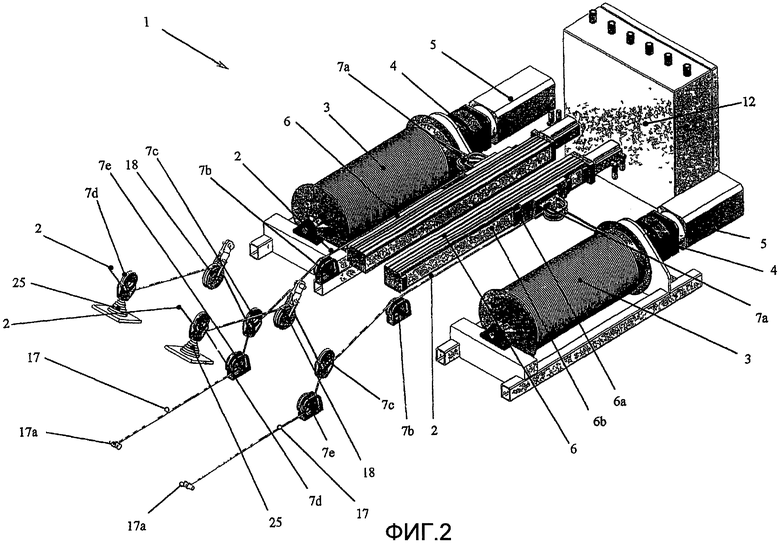
Если, в частности, обратиться к фиг.1 и 2, то можно заметить, что базовая платформа 1 содержит, по меньшей мере, две лебедки 3, на каждую из которых намотан или с каждой из которых размотан соответствующий трос 2, при этом каждую из таких лебедок 3 соединяют, возможно, посредством введения, по меньшей мере, одного редуктора 4, с электрическим генератором/двигателем 5. Вблизи от каждой лебедки 3 находится направляющий модуль 6, который принудительно обеспечивает упорядоченную намотку каждого троса 2 на соответствующую лебедку 3, и передаточная система, которая направляет каждый трос 2 к профилю 30 крыла. При этом профиль 30 крыла приводят в действие посредством разматывания и повторного наматывания тросов 2 на соответствующие лебедки 3. В этом случае тросы 2 представляют собой соединительный элемент между воздушным змеем 30 и базовой платформой 1, и обеспечивают передачу силы между воздушным змеем 30 и лебедками 3. Когда воздушный змей 30 поднимают посредством ветра, тросы 2 определяют вращение лебедок 3 и, следовательно, преобразование энергии посредством генераторов 5. Вместо этого в течение возврата воздушного змея 30 тросы 2 передают к профилю 30 крыла натяжение, создаваемое при вращении лебедок 3 посредством двигателей. Очевидно, что длина и диаметр каждого троса 2 зависят от ветра и условий безопасности, при которых собираются работать.
Передаточная система содержит блоки, которые сопровождают тросы 2 через шкивы. В предпочтительном варианте, показанном на фигурах, передаточная система, в частности, состоит из следующего:
первой пары блоков 7а, собранных на блоках скольжения 6а направляющих модулей 6 тросов 2;
второй пары блоков 7b, расположенных далее по ходу от направляющих модулей 6 тросов 2 и предназначенных для удерживания по горизонтали участков троса 2, заключенных между этими блоками 7b и теми, которые установлены на блоках скольжения 6а направляющих модулей 6;
третьей пары блоков 7d, предназначенных для направления тросов 2 к профилю 30 крыла;
по меньшей мере, одной пары механизмов ослабления резких изменений нагрузки, вводимой между второй 7b и третьей 7d парой блоков; каждый из таких механизмов состоит, по меньшей мере, из одного упругого элемента 17, например такого, как упругий трос или пружина, который вблизи от одного из его концов 17а прикреплен к базовой платформе 1, а у другого конца он взаимодействует с участком троса 2 далее по ходу от направляющего модуля 6, причем такой упругий элемент 17, возможно, направляют между этими двумя концами к пятому блоку 7е. Взаимодействие между упругими элементами 17 и тросами 2 и происходит посредством введения между ними четвертого блока 7с. Когда дует ветер, упругие элементы 17 будут растянуты, смягчая резкое изменение нагрузки. Напротив, если нагрузка резко уменьшается, то упругие элементы 17 сжимаются, частично компенсируя задержку, с которой интеллектуальная система управления, описанная ниже, вступает в действие, чтобы приспособиться к уменьшению натяжения. Передаточная система, показанная на фигурах, предпочтительно снабжена двумя механизмами для ослабления резких изменений нагрузки, по одному вблизи от каждой лебедки 3.
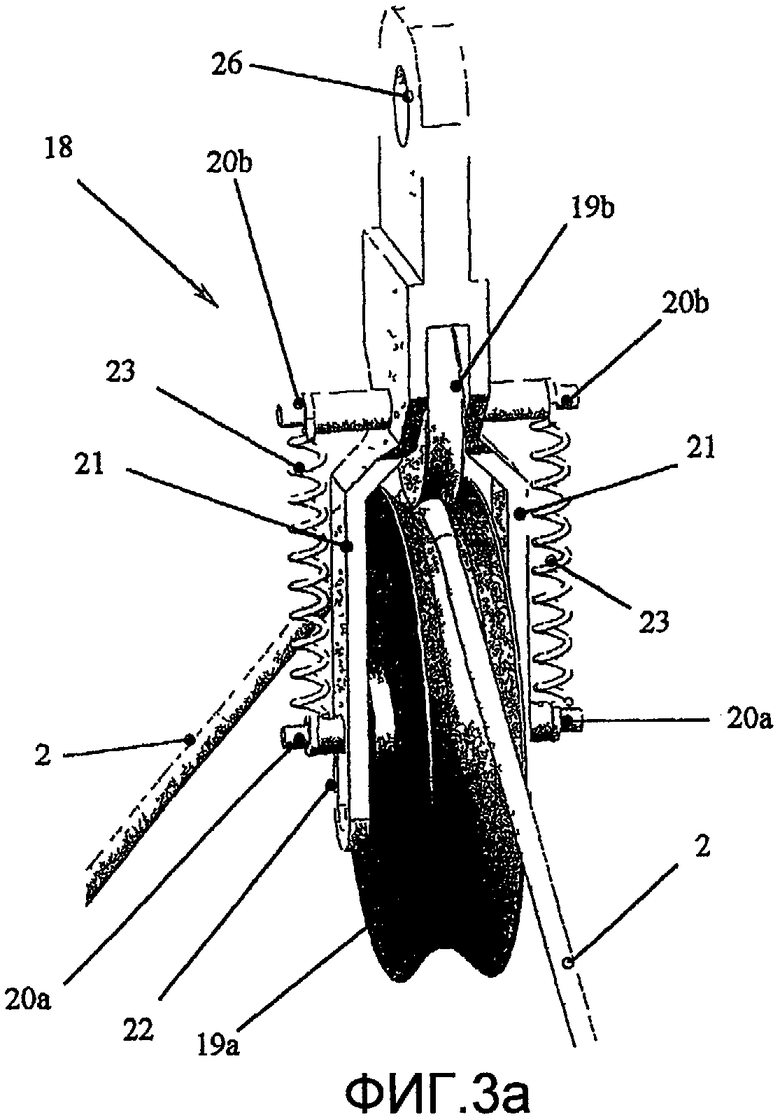
Передаточная система дополнительно содержит пару натяжных устройств 18, по одному для каждого троса 2, расположенных между механизмами ослабления резких изменений нагрузки и третьей парой блоков 7d, которые сопровождают трос 2 к профилю 30 крыла.
Если обратиться к фиг.3а и 3b, то можно заметить, что такое устройство 18 состоит из первого 19а и второго 19b шкивов, которые обращены друг к другу, имея копланарные оси вращения. Шкивы 19а, 19b вращаются вокруг соответствующего первого 20а и второго 20b поворотных пальцев, и вставлены между двумя захватами 21. В частности, первый поворотный палец 20а скользит внутри пары прорезей 22, выполненных в захватах 21, при этом его расстояние от второго поворотного пальца 20b не постоянное и может изменяться. Первый 20а и второй 20b пальцы могут быть дополнительно взаимосвязаны посредством упругих элементов, например таких, как пара пружин 23, каждая из которых находится вблизи от каждого захвата 21. Натяжное устройство 18 крепят к базовой платформе 1, например, посредством стержня (не показан), проходящего внутри отверстия 26 захвата 21. Размеры шкивов 19а, 19b и коэффициент жесткости пружин 23 таковы, что когда нагрузка на тросе 2 отсутствует, два шкива 19а, 19b находятся в первом положении, подобном положению, показанному, в частности, на фиг.3, в котором они входят в контакт с тросом 2, замедляя и застопоривая его. При этом, если ветер прекращается, когда профиль 30 крыла находится в полете, то натяжные устройства 18 предотвратят проскальзывание тросов 2, сохраняя их под натяжением благодаря действию шкива упругих тросов 17 механизма ослабления резкого изменения нагрузки. Вместо этого, когда происходит разматывание и повторная намотка тросов 2, нагрузка будет такой, что пружины 23 обеспечат относительное перемещение шкивов 19а, 19b в сторону, гарантируя обычное качение троса 2 на первом шкиве 19а. Передаточная система, показанная на фигурах, предпочтительно снабжена двумя натяжными устройствами 18, по одному вблизи от каждой лебедки 3.
Блоки 7а, смонтированные на блоках скольжения 6а направляющих модулей 6 тросов 2, блоки 7b, расположенные далее по ходу от таких модулей 6, и пара блоков 7с механизма ослабления резких изменений нагрузки имеют фиксированные головки, в то время как в других блоках головки могут свободно поворачиваться. В частности, в блоках 7d, которые сопровождают тросы к профилю 30 крыла, можно выполнить поворотное соединение с базовой платформой 1, создаваемое посредством, по меньшей мере, одной пружины 25. Это обеспечивает значительную свободу вращения, и такое требование является основополагающим для возможности сопровождения тросов 2 к профилю 30 крыла, когда действует система согласно настоящему изобретению.
Направляющие модули 6 представляют собой компоненты базовой платформы 1, которые принудительно обеспечивают упорядоченную намотку тросов на лебедки 3 и препятствуют скольжению между тросами 2 и захватами лебедок 3, и между самими тросами 2. Каждый направляющий модуль 6 оснащают блоком скольжения 6а, который скользит по рельсу 6b, расположенному параллельно оси вращения соответствующей лебедки 3. Блок скольжения 6а может совершать поступательное движение по двум направлениям вдоль такого рельса 6b, и на нем смонтирован первый блок 7а. В частности, скольжением такого блока 6а управляют посредством механизма скольжения (не показан), который обеспечивает это скольжение совместно с вращением лебедки 3. Предпочтительно, чтобы механизм скольжения мог быть приведен в движение с помощью винта или ремня. В случае механизма скольжения, приводимого в действие винтом, поступательным движением блока скольжения 6а по рельсу 6b управляют посредством вращения шарикового рециркуляционного, прецизионного винта. В случае механизма скольжения, приводимого в действие ремнем, блок скольжения 6а монтируют на зубчатом ремне привода.
В направляющих модулях 6 тросов 2 поступательным движением блока скольжения управляют посредством, по меньшей мере, одного электродвигателя (не показан), который действует на механизме скольжения, работу которого контролирует интеллектуальная система управления, которая управляет профилем 30 крыла.
Система согласно настоящему изобретению предпочтительно оснащена двумя направляющими модулями 6 тросов 2, по одному для каждой лебедки 3.
Лебедки 3 являются компонентами, снабженными воротом, вокруг которого наматывают тросы 2. Лебедки 3 соединены с помощью промежуточных редукторов 4, причем предпочтительно эпициклического типа, с генераторами/электродвигателями 5. При этом вращение каждой лебедки 3 связано с вращением соответствующего приводного вала. В течение стадии вырабатывания электроэнергии происходит разматывание тросов 2 с лебедок для вращения лебедок 3. Вместо этого в течение возврата профиля 30 крыла двигатели приводят лебедки 3 в действие. Устройство содержит две лебедки 3, по одной для каждого троса 2.
Генераторы 5 представляют собой компоненты, посредством которых происходит вырабатывание электроэнергии. Их приведение в действие осуществляют посредством лебедок 3 при разматывании тросов 2. В системе согласно настоящему изобретению генераторы 5 также действуют как двигатели, выполняя повторное наматывание тросов 2 на лебедку 3, когда это необходимо для возврата профиля 30 крыла. Управление генераторами/электродвигателями 5 осуществляют посредством интеллектуальной системы управления в режимах, которые будут описаны ниже, при этом систему согласно настоящему изобретению предпочтительно оснащают двумя генераторами/электродвигателями 5.
Интеллектуальная система управления представляет собой систему, посредством которой автоматически приводят в действие профили 30 крыла. Основная задача такой системы состоит в управлении работой генераторов/двигателей 5 и, следовательно, во вращении лебедок 3. Приведение в действие профиля 30 крыла фактически происходит посредством регулирования разматывания и повторного наматывания тросов 2 на те же самые лебедки 3, с помощью которых вырабатывают энергию. При этом тросы 2, которые соединяют профиль 30 крыла с базовой платформой 1, представляют собой силовые тросы и приводные тросы. Вырабатывание энергии всецело зависит от направления вращения лебедок 3: вырабатывание электроэнергии происходит тогда, когда вращение лебедок будет определено тягой тросов 2 и обеспечивает приведение генераторов 5 в действие. Вместо этого происходит расходование энергии, когда вращение лебедок 3 определено двигателями и обеспечивает повторное наматывание тросов 2. Приведение в действие профиля крыла зависит как от направления вращения, так и от скорости вращения лебедок 3. Профиль 30 крыла фактически приводится в действие посредством соответствующего изменения угла привязки к ветру. Такой угол зависит от положения профиля 30 крыла по отношению к скорости ветра и, следовательно, от длины каждого из двух участков размотанного троса 2. Если, например, для принятия профилем 30 крыла некоторого наклона необходимо укоротить длину троса 2, размотанную по отношению к другому тросу, чтобы получить такой результат, необходимо будет ускорить или замедлить вращение лебедки 3 по отношению к другой лебедке. Поэтому без снижения вырабатываемой энергии или возврата профиля 30 крыла приведение в действие профиля 30 крыла происходит посредством дифференцирования скорости вращения двух лебедок 3. Автоматический контроль полета профиля 30 крыла выполняют посредством задаваемых алгоритмов управления, с помощью которых профиль 30 крыла приводят в действие, чтобы избежать колебаний, неустойчивости при приведении в действие и локального максимума тяги. Траекторию пути или полета, выполняемого профилем 30 крыла, предвидят для оптимизации энергии, создаваемой в течение цикла работы, при максимальной безопасности, с максимальным соответствием требованиям в отношении динамики и с доведением до минимума времени, необходимого для прохождения из текущего положения в предсказанное положение. Автоматическое приведение профиля 30 крыла в действие происходит посредством процесса, выполняемого в реальном масштабе времени, при котором происходит прием и обработка информации, поступающей от набора наземных датчиков и на профиле 30 крыла, на котором может оказаться необходимым проведение предварительной обработки данных, чтобы не перегрузить связь с находящимися на земле компонентами интеллектуальной системы управления прежде всего в том случае, если такую связь осуществляют беспроводным способом. Поступающая информация относится к положению профиля 30 крыла, к ускорениям, к силам (например, к нагрузке на трос, определяемой считыванием крутящего момента двигателя 5) и к геометрически определяемым величинам. Интеллектуальная система управления осуществляет обработку входных сигналов посредством заданных алгоритмов и создает выходной сигнал, который приводит в действие генераторы/двигатели 5, подсоединенные к лебедкам 3.
Обработка поступающей информации требует интервала времени, который пропорционален длительности анализа данных. Посредством доведения до минимума продолжительности такого интервала задержка, с которой приводят в действие профиль 30 крыла, будет уменьшена. По этой причине имеет преимущество кратковременный анализ. Однако кратковременный анализ может не позволить предвидеть путь с оптимальной длительностью по времени. Поэтому важно отдать приоритет оптимальному компромиссному решению, так чтобы обработка данных происходила за короткое время, но достаточное для возможности получения оптимальной длины пути. Однако резонно предположить, что создание пути, который длиннее пути, описанного в течение рабочего цикла, бесполезно.
Прогнозирующий алгоритм, осуществляемый интеллектуальной системой управления, в каждом случае определяет оптимальное положение, которое профиль 30 крыла должен занять в последующие моменты посредством соответствующего полета, и параметры управления (высоту полета, динамику противовеса, данные тяги, расчет безопасности в запрещенных зонах, местоположения конструктивных напряжений, неустойчивость или чрезмерные силы, моменты, в которые должно быть выполнено приведение в действие, …). Каждый параметр для любого момента времени соответствует координатам оптимального положения (с указанием параметра), которое профиль крыла должен занять в определенный момент. Определяют относительную весомость каждого параметра, задание которого происходит в каждый момент посредством ретроактивной системы, которая корректирует весомость большинства критичных параметров, чтобы принять решение о том, какие параметры более важны. Как только собраны наилучшие координаты для каждого параметра, определяют векторную сумму для каждого момента времени с обоснованием предвидения. Наконец, после введения значимости времени, когда преобладает краткосрочная стратегия, для каждого момента времени вычисляют оптимальные координаты. После того как обеспечены координаты идеальных положений, которые профиль 30 крыла должен занять в последующие моменты времени, выполняемый в реальном времени процесс определяет наилучший путь, по которому должен следовать профиль 30 крыла для достижения этих положений. В алгоритме, применяемом для этой цели, используют уравнения полета, инерцию профиля 30 крыла и долю реакции, которую она может составлять в зависимости от разности тяги на тросах 2, для определения закона приведения профиля 30 крыла в действие. Посредством подходящих способов управления приведение в действие тщательно выверяют для устранения опасности колебания и чрезмерного коэффициента усиления вследствие инерционности, упругости кинематической цепи и необходимой задержки.
Контроль за вращением лебедок 3 не является единственной функцией, выполняемой интеллектуальной системой управления. Как было указано ранее, система также отвечает за приведение в действие направляющих модулей 6 тросов 2. Двигателями, которые приводят в действие такие модули посредством работы на их механизмах скольжения, управляют для того, чтобы соответствующим образом связать вращение лебедок 3 с поступательным движением блоков 6а скольжения направляющих модулей 6. Поэтому посредством интеллектуальной системы управления скорость и направление поступательного движения блоков скольжения 6а регулируют для принудительной, упорядоченной намотки тросов 2 на лебедки 3, а также для предотвращения проскальзывания между тросами 2 и захватами лебедок 3, и между самими тросами.
Наконец, интеллектуальная система управления должна распознавать такие события, как порывы ветра и сброс нагрузки, и своевременно приспосабливаться к ним. В случае порывов ветра интеллектуальная система управления вступает в действие путем уменьшения натяжения тросов 2, чтобы избежать повреждения системы от чрезмерной нагрузки. Это осуществляют посредством приведения в действие лебедок 3, чтобы обеспечить быстрое разматывание тросов 2.
Резкого падения нагрузки приходится избегать потому, что недостаточное натяжение тросов 2 приводит к броскам профиля 30 крыла без какой-либо возможности управления им. Если происходит падение нагрузки, то интеллектуальная система управления осуществляет вмешательство путем ускорения вращения лебедок 3 (в том случае, когда это происходит при повторном наматывании) или путем изменения их вращения на обратное (если падение нагрузки происходит при разматывании). Таким образом, происходит управление возвратом профиля 30 крыла.
Система электроснабжения содержит все необходимые компоненты для накапливания и подачи электрической энергии. В частности, система электроснабжения снабжена средствами подачи энергии, трансформаторами и аккумуляторами, посредством которых происходит накапливание вырабатываемой электроэнергии при разматывании тросов 2, подача тока к двигателю 5 при возврате профиля 30 крыла, питание электронных компонентов согласно настоящему изобретению и подача электрической энергии к возможным внешним потребителям.
Работой всех электронных компонентов системы согласно настоящему изобретению управляют посредством интеллектуальной системы управления во взаимодействии с системой электроснабжения.
Из того, что сказано выше, очевидно, что по отношению к тому, что предложено в существующем уровне техники, система согласно настоящему изобретению обеспечивает новый способ управления профилем 30 крыла, поскольку нет отличия между приводными тросами и силовыми тросами, и обе этих функциональных возможности обеспечивают только посредством двух тросов 2. Поэтому имеется одна пара лебедок 3, приводящая в действие генераторы 5, которые также действуют как двигатели. В то время как в существующих проектах возврат воздушного змея осуществляют посредством тех же самых лебедок, с помощью которых обеспечивают вырабатывание электроэнергии, в системе согласно настоящему изобретению это происходит посредством тех же лебедок 3, которые также приводят в действие профиль 30 крыла, а не только осуществляют возврат. Углом установки по ветру и площадью ветрового фронта, пересекаемую воздушным змеем 30, управляют посредством регулирования длины участка размотанных тросов 2, чтобы обеспечить максимальную подачу энергии при наборе высоты профилем 30 крыла, и минимальное потребление энергии в течение фазы возврата.
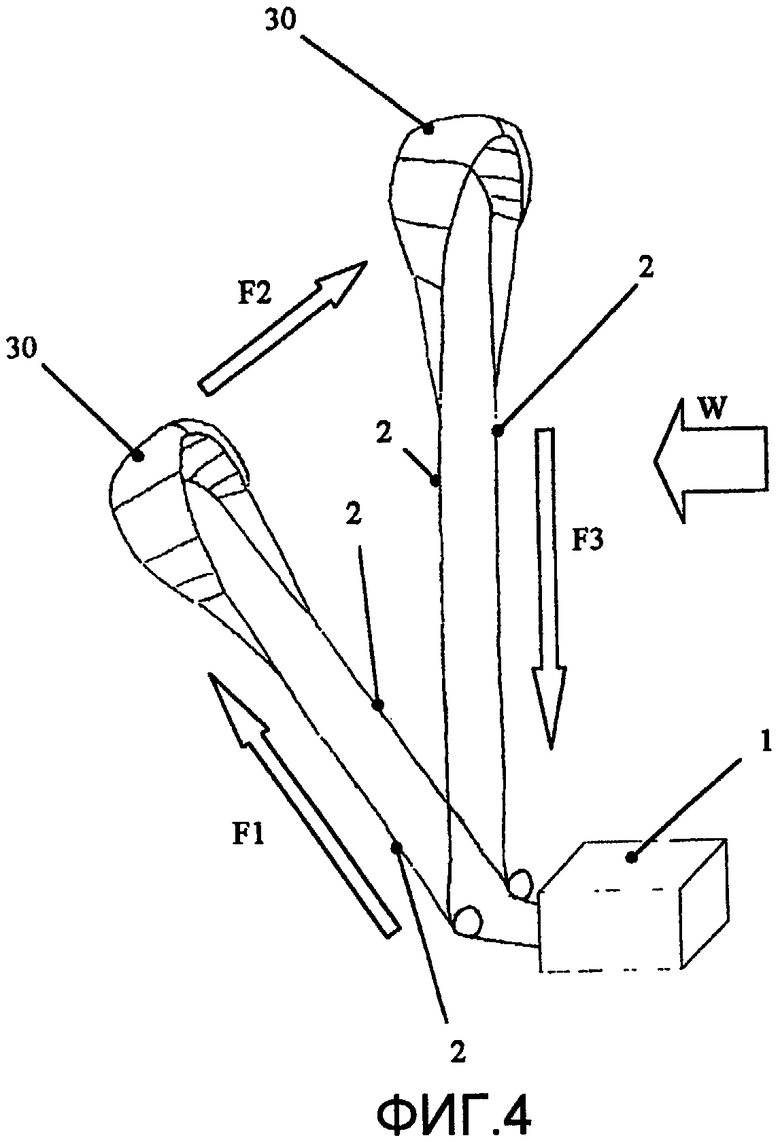
Настоящее изобретение, кроме того, относится к способу вырабатывания электрической энергии посредством ветровой системы, подобной ранее описанной системе. Фактически способ согласно настоящему изобретению, который в целом представляет собой способ преобразования энергии ветра в электрическую энергию, осуществляемого посредством ветровой системы согласно настоящему изобретению, является способом прерывистого типа. Если, в частности, обратиться к фиг.4, то можно заметить, что способ согласно настоящему изобретению содержит следующие этапы:
a) управление F1 траекторией полета профиля 30 крыла предпочтительно автоматически посредством интеллектуальной системы управления таким образом, что энергия, которая, возможно, будет отобрана у ветра или у потока W, обеспечиваемого ветром, будет максимальной. В частности, интеллектуальная система управления приводит в действие профиль 30 крыла, чтобы использовать «подъемную силу», а именно, компонент силы, перпендикулярный скорости W ветра. При этом профиль 30 крыла набирает высоту, продолжая сканировать поверхность ветрового фронта. Следовательно, ветер обеспечивает набор высоты профилем 30 крыла, натягивая тросы 2, соединенные с базовой платформой 1: эта тяга будет преобразована во вращение на уровне лебедки 3, которое посредством редуктора 4 будет передано генератору 5, где посредством выигрыша, обусловленного парой сил, которые противоположны, происходит вырабатывание электроэнергии;
b) приведение в действие F2 профиля 30 крыла, причем предпочтительно автоматически, посредством интеллектуальной системы управления, чтобы достичь положения, близкого к сваливанию, вблизи от которого напор, вызываемый действием ветра, недостаточен;
c) повторное наматывание F3 тросов 2 на лебедки 3 посредством двигателей 5, которые также действуют как генераторы. Тросы 2 наматывают при минимальном потреблении энергии, и после окончания возврата тросов 2 профиль 30 крыла будет расположен так, чтобы обеспечить его возврат в состояние максимальной тяги;
d) последующее повторение процесса.
Энергия, вырабатываемая при разматывании тросов 1, больше, чем энергия, затрачиваемая на их повторное наматывание. Следовательно, баланс энергии будет положительным.
Посредством использования способа согласно настоящему изобретению и благодаря интеллектуальной системе управления, которая в режиме реального времени обрабатывает информацию, поступающую от группы датчиков, установленных на профиле 30 крыла, и набором наземных датчиков можно приводить в действие профиль 30 крыла, чтобы обеспечить набор им высоты главным образом посредством использования подъемной силы. При этом путь, по которому следует профиль 30 крыла в течение каждого цикла выполнения процесса, будет оптимальным в отношении энергии, которая может быть отобрана у ветра при следовании по таким путям (например, при последовательности из восьми), чтобы пересечь максимальный воздушный объем. Поэтому способ согласно настоящему изобретению гарантирует не только постоянство в отношении вырабатывания электроэнергии, но и оптимизацию энергии, которая может быть получена в течение каждого цикла при таком же размере профиля крыла по отношению к известным системам.
Для доказательства высокой эффективности, демонстрируемой ветровой системой и способом согласно настоящему изобретению, и лишь в качестве примера, предположим, что скорость ветра Vw, которую профиль 30 крыла должен выдерживать (то есть без повреждения его компонентов), составляет 6 м/сек. Дополнительно предположим, что максимальная скорость Vs, при которой происходит разматывание тросов, составляет 4 м/сек. Профиль 30 крыла свободно колеблется посредством «сканирования» поверхности ветрового фронта, и при приведении профиля 30 крыла в действие подобным образом получают скорость, значительно бо'льшую, чем скорость ветра. В частности, предположим, что величина отношения скорости Vk профиля 30 крыла к скорости ветра Vw составляет более 10. Если максимальная скорость ветра Vw составляет 6 м/сек, то максимальная скорость Vk профиля 30 крыла составит 60 м/сек. Не должно вызывать удивления то, что максимальная скорость Vs разматывания тросов 2 принята равной 4 м/сек, в то время как максимальная скорость профиля 30 крыла составляет 60 м/сек. Фактически профиль 30 крыла, подобный обычному воздушному змею, может непрерывно изменять направление своего движения без соответствия такого изменения быстрому разматыванию тросов 2.
Далее предположим, что длина каждого троса 2 в тот момент, в который после завершения его разматывания профиль будет захвачен ветром, составляет 80 метров, и что тяга, создаваемая потоками, обусловленными действием ветра, приводит к разматыванию тросов приблизительно на 200 метров.
Предположим, что скорость разматывания составляет 4 м/сек, а вырабатывание энергии происходит за 50 секунд на цикл [200/4 м(м/сек)]. Допустим, что другие 4 секунды необходимы для того, чтобы профиль 30 крыла занял положение, близкое к сваливанию (по азимуту или боковое). В частности, в течение первой секунды все еще будет происходить разматывание тросов 2 со средней скоростью, составляющей 2 м/сек. В течение остальных трех секунд разматывание будет происходить при средней скорости 4 м/сек. В общем, в течение стадии прохождения к состоянию, близкому к сваливанию, должно произойти разматывание тросов примерно на 2 метра [2·1 (м/сек)сек] и повторное наматывание на 12 метров [4·3 (м/сек)·сек]. В конце этой стадии длина тросов 2 должна составлять 270 метров (280+2-12). Теперь начинается повторное наматывание, при котором длина тросов будет забрана назад до первоначально допущенной длины порядка 80 метров. Если повторное наматывание происходит со скоростью 8 м/сек, то потребуется время, составляющее 23,75 секунды [190/8 м/(м/сек)].
Теперь описанный рабочий цикл соответствует гипотетическому стандартному циклу способа согласно настоящему изобретению, в течение которого длина тросов не может быть короче 80 метров. Очевидно, что также имеется начальный пусковой цикл, в течение которого необходимо вручную размотать предполагаемые 80 метров троса (проходящие в сторону от базовой платформы 1) и обеспечить захват воздушного змея ветровыми потоками. Этот первый цикл используют не для вырабатывания электрической энергии, а для того, чтобы привести ветровую систему в ее рабочее состояние.
Во всех случаях ссылки на предыдущий пример в целях безопасности максимальная длина каждого троса 2 не должна быть короче 318 метров. Фактически можно предположить, что могут возникать порывы ветра, равные 12 м/сек продолжительностью 4 секунды; для предотвращения повреждения ветровой системы можно допустить, что в таком случае скорость разматывания тросов 2 составит 8 м/сек. Порыв ветра должен обеспечить разматывание тросов 2, равное 36 метрам [8·4 (м/сек)·сек].
Принимая во внимание повторное наматывание тросов 2, когда происходит возврат в положении сваливания, и безопасное разматывание, которое происходит при порывах ветра, в случае описанного примера максимальная скорость вращения, которую должны выдерживать лебедки 3, должна быть равной (применительно к тросам 2) 8 м/сек.
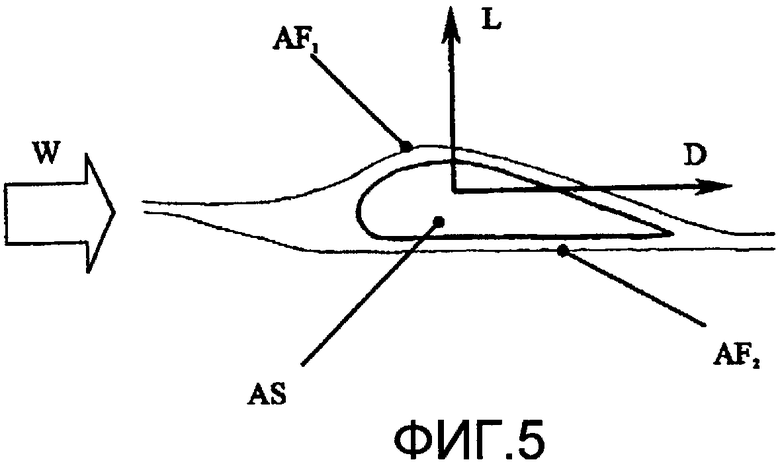
Теперь также можно провести некоторый анализ, касающийся энергии, которую профиль 30 крыла способен забрать у ветра. Для этой цели и со ссылкой на фиг.5 вначале соответствующим образом рассмотрим аэродинамику системы. Известно, что когда ветровой поток встречается со стационарной аэродинамической поверхностью («аэродинамическим профилем») AS, такой поток создает две силы: лобовое сопротивление D, параллельное направлению W, вдоль которого дует ветер, и подъемную силу L, перпендикулярную направлению W. В случае ламинарного ветрового течения ветровые потоки AF1, проходящие поверх аэродинамической поверхности AS, будут быстрее, чем потоки AF2, которые проходят ниже нее, поскольку они должны проходить большее расстояние. Это определяет снижение давления в верхней части профиля и, следовательно, градиент давления, который создает подъемную силу L.
При рассмотрении фиг.6 вместо этого допустим, что профиль AM может быть перемещен вдоль направления DT подъемной силы. Вследствие такого движения нижняя поверхность аэродинамического профиля AM будет наклонной по отношению к скорости ветра. В таком случае подъемная сила и лобовое сопротивление будут соответственно действовать перпендикулярно и параллельно соответствующей скорости ветра по отношению к профилю.
При обозначении S1 силы, параллельной направлению движения, и S2 силы, перпендикулярной этому направлению, компонент подъемной силы L, параллельный направлению движения, имеет тот же самый смысл, что и поступательное перемещение аэродинамического профиля AM, в то время как параллельный компонент лобового сопротивления D имеет противоположный смысл.
По этой причине для сохранения движения вдоль перпендикулярного направления к ветровым потокам, приемлем наклон профиля AM, чтобы получить высокое отношение компонента подъемной силы L вдоль направления движения DT профиля AM к компоненту лобового сопротивления D.
Эти соображения также справедливы для профиля 30 крыла ветровой системы согласно настоящему изобретению. Интеллектуальная система управления фактически приводит в действие профиль 30 крыла, чтобы сохранить высокое отношение подъемной силы и лобового сопротивления в течение стадии набора высоты профилем 30 крыла. При этом профиль 30 крыла колеблется при сканировании ветрового фронта и вырабатывает энергию благодаря тяге тросов 2. Энергию, вырабатываемую при наборе высоты профилем 30 крыла, вычисляют посредством умножения удельной мощности ветра на площадь ветрового фронта, пересекаемую профилем крыла (а именно площадью воздушного змея) А, и на коэффициент мощности воздушного змея KPF, а коэффициент полезного действия зависит от отношения скорости профиля крыла и ветра Vk/VW, и от двух коэффициентов Кd и K1 (Кd относится к лобовому сопротивлению, а именно, когда воздушный змей тянет сдерживающую его связь с землей с силами и скоростями вдоль направления ветра, a K1 относится к подъему, а именно, когда воздушный змей тянет сдерживающую его связь с землей посредством колебаний для сканирования поверхности ветрового фронта). Как указано ранее, вследствие подъема скорость воздушного змея значительно больше скорости ветра. Чем больше мощность воздушного змея, тем выше подъем по отношению к лобовому сопротивлению.
Для примера всегда можно предположить, что Vk/Vw=10; K1=1, 2, a Kd=0,1.
В этом случае должен быть получен KPF=20.
Если предположить, что плотность ρ воздуха постоянна и равна 1,225 кг/м3, то удельная мощность ветра должна быть такой:
Удельная мощность ветра = 
«Мощность воздушного змея» - это мощность, которая может быть выработана посредством воздушного змея, и которая может быть выражена следующей формулой:
мощность воздушного змея = KPF·удельная мощность ветра·А, где А площадь воздушного змея, которая пересекает ветровой фронт. Если, например, используют профиль крыла, имеющий площадь А=18 м2, толкаемый со скоростью порядка 60 м/сек посредством ветра, который дует со скоростью 6 м/сек, то мощность, которая может быть получена на уровне тросов, составит 47628 ватт. Следовательно, такая мощность соответствовала бы максимальной мощности, которую может вырабатывать воздушный змей.
Значение, принимаемое KPF, так или иначе, зависит от коэффициента полезного действия профиля крыла. Можно сделать так, чтобы KPF принимал значения, большие 20. Если, например KPF принимает значение, равное 40, то максимальная мощность, которая может быть получена от воздушного змея при площади, равной 18 м2, составит 95256 ватт.
Если обратиться к фиг.7, то можно заметить, что ветровая система согласно настоящему изобретению находит эффективное применение также и в области мореплавания для буксирования судов посредством использования энергии, получаемой от ветра.
В этом случае все ранее описанные компоненты системы согласно настоящему изобретению располагают на парусном или моторном судне 100. Передаточная система, которая содержит тросы 2, проходящие к профилю 30 крыла, расположена на носу 101, при этом профиль 30 крыла приводят в действие так, чтобы он всегда находился перед судном 100.
В отличие от ранее описанного применения основное требование, предъявляемое к ветровой системе, состоит не в том, чтобы она содержала что-либо еще для преобразования энергии ветра в электрическую энергию, а в использовании силы ветра для буксирования судна 100 и, следовательно, в преобразовании энергии ветра в механическую энергию.
Подобно предыдущему применению, интеллектуальную систему управления программируют для доведения до максимума энергии, которую мощный силовой профиль 30 крыла способен отобрать у ветра, в любом случае избегая того, чтобы нагрузка на трос становилась чрезмерной и происходило повреждение компонентов ветровой системы. Основное отличие от предыдущего случая применения состоит в том, что использование энергии ветра теперь не происходит прерывистым образом. Фактически, воздушный змей приводят в действие не для чередования стадии набора высоты и стадии возврата с обеспечением положительного баланса энергии, а для оптимизации непрерывного использования потоков, обусловленных деятельностью ветра. В течение работы в установившемся состоянии возврат воздушного змея 30 происходит исключительно для того, чтобы приспособиться к возможным падениям ветра или для корректировки положения профиля 30 крыла. Разматывание и повторное наматывание тросов 2 теперь происходит не с целью циклического вырабатывания энергии, а только для приведения в действие. Тросы 2, посредством которых профиль 30 крыла соединяют с судном, можно считать как силовыми, так и приводными тросами 2. Приведение в действие происходит согласно тому же самому принципу, который описан для предыдущего случая применения. Передача мощности более не происходит посредством приведения в действие генератора при вращении лебедки, а по возможности ограничена разматыванием тросов 2, так что судно 100, к которому профиль 30 крыла подсоединен посредством тросов 2, перемещается по отношению к фиксированной системе координат.
Можно заметить как в обоих случаях использование энергии ветра связано с продвижением профиля 30 крыла в пространстве. Различие состоит в том, что если в ранее описанном устройстве наблюдатель составлял единое целое с фиксированной системой координат (а именно, с землей), то в случае применения к судну базовая платформа 1 и наблюдатель следуют за воздушным змеем 30 в течение его продвижения.
В любом случае, можно обеспечить вырабатывание электроэнергии посредством ветровой системы согласно изобретению, которая применена к судну 100. Фактически, при необходимости подвижных концов, подобно тому, что описано в предыдущем случае, можно использовать профиль 30 крыла для вырабатывания электричества. Интеллектуальная система управления в этом случае будет вводить соответствующие ограничения на полет профиля 30 крыла для предотвращения вхождения тросов 2 в контакт с другими компонентами судна 100.
Наряду с ранее упомянутыми преимуществами ветровая система и способ согласно настоящему изобретению обеспечивают получение других значительных результатов по отношению к тому, что уже предложено в известных технических решениях, в частности:
с ветровой системой легко обращаться и, следовательно, она эффективна для подачи электрической энергии при аварийных ситуациях, например, в случае затруднения электроснабжения или когда место для монтажа оборудования недоступно;
ее чрезвычайно низкая стоимость и рабочие характеристики обеспечивают возможность использования устройства в традиционных случаях (при происшествиях, на верфях…);
ветровая система позволяет использовать технологию, предназначенную для большеразмерных стационарных генераторов вследствие ее характеристик, касающихся возможности изменения масштаба;
ветровая система также может использовать течения на большой высоте, где возможность использования более сильного ветра и скорости гарантирует бо'льшую плотность энергии по отношению к ветровым потокам на уровне земли;
рабочий цикл при выполнении процесса согласно изобретению происходит быстро, обеспечивая использование энергии ветра от значительного объема воздуха при относительно небольшом профиле крыла;
наиболее дорогостоящие компоненты ветровой системы расположены на уровне земли и защищены;
мощность вырабатывают вследствие использования осевого компонента подъемной силы, что гарантирует бо'льшую подачу энергии по отношению к использованию лобового сопротивления.

Изобретения относятся к области энергетики. Ветровая система для преобразования энергии содержит по меньшей мере, один профиль крыла, который может быть приведен в действие с земли и погружен, по меньшей мере, в один поток ветра, базовую платформу для управления профилем крыла, расположенную на уровне земли и соединенную посредством лебедки и двух тросов с силовым профилем крыла, и передаточную систему, направляющую тросы к профилю крыла и снабженную парами блоков и парами натяжных устройств. Тросы приспособлены для передачи сил от профиля крыла и к нему, и оба из них используют для управления траекторией полета профиля крыла и для вырабатывания энергии. Способ вырабатывания электрической энергии посредством ветровой системы заключается в следующем: управляют траекторией полета профиля крыла для доведения до максимума энергии, профиль при наборе высоты натягивает тросы, соединенные с базовой платформой, которые приводят лебедки во вращение; приводят в действие профиль крыла для достижения им положения, близкого к сваливанию; повторно наматывают тросы лебедками посредством двигателей и располагают профиль крыла для возврата к состоянию максимальной тяги. Система обеспечивает получение как электроэнергии, так и механической энергии и может быть использована для буксирования судна. 3 н. и 15 з.п. ф-лы, 8 ил.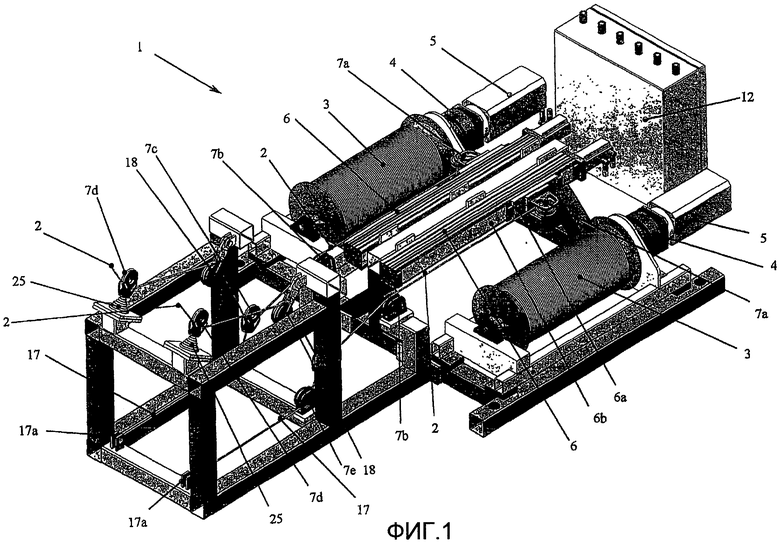
1. Ветровая система для преобразования энергии, отличающаяся тем, что она содержит:
по меньшей мере, один силовой профиль (30) крыла, выполненный с возможностью приведения его в действие с земли и погруженный, по меньшей мере, в один ветровой поток (W);
базовую платформу (1), расположенную на уровне земли и подсоединенную посредством двух тросов (2) к силовому профилю (30) крыла, при этом базовая платформа (1) выполнена с возможностью приведения профиля (30) крыла в действие и преобразования энергии ветрового потока в электрическую или механическую энергию, а два торса (2) выполнены с возможностью передачи сил от профиля крыла (30) и к нему, причем оба они предназначены для использования при контроле траектории полета профиля крыла (30) и передаче энергии;
передаточную систему, выполненную с возможностью придания направления каждому из тросов (2) к профилю (30) крыла, причем передаточная система содержит:
первую пару блоков (7а), смонтированную на блоках (6а) скольжения направляющих модулей (6) тросов (2);
вторую пару блоков (7b) далее по ходу от направляющих модулей (6) тросов (2), выполненную с возможностью удерживания по горизонтали участков тросов (2), заключенных между вторыми блоками (7b) и первыми блоками (7а);
третью пару блоков (7d), выполненную с возможностью передачи тросов (2) к профилю крыла (30),
передаточная система содержит, по меньшей мере, одну пару натяжных устройств (18), расположенных между механизмами ослабления и третьей парой блоков (7d), а третьи блоки (7d) оснащены поворотным соединением с базовой платформой (1), реализуемым посредством, по меньшей мере, одной пружины (25).
2. Система по п.1, отличающаяся тем, что профиль (30) крыла выполнен с возможностью приведения его в действие на траектории полета посредством базовой платформы (1), чтобы циклически переводить его из положения, в котором тяга, создаваемая ветровым потоком, максимальна, в положение, близкое к сваливанию, по его азимуту или горизонтально, в котором тяга минимальна, для возврата посредством лебедок (3).
3. Система по п.1, отличающаяся тем, что она содержит интеллектуальную систему управления, действующую на базовой платформе (1) и выполненную с возможностью автоматического управления профилем (30) крыла вдоль траектории полета.
4. Система по п.3, отличающаяся тем, что она содержит систему (12) электроснабжения, взаимодействующую с интеллектуальной системой управления для управления накапливанием и подачей энергии.
5. Система по п.3, отличающаяся тем, что интеллектуальная система управления оснащена комплектом датчиков, расположенных на профиле (30) крыла и предпочтительно выполненных с возможностью посылать информацию интеллектуальной системе управления беспроводным способом.
6. Система по п.1, отличающаяся тем, что базовая платформа (1) содержит, по меньшей мере, две лебедки (3), на каждую из которых наматывается или с каждой из которых разматывается соответствующий один из тросов (2), при этом каждая из лебедок (3) соединена с генератором/электродвигателем (5).
7. Система по п.6, отличающаяся тем, что лебедка (3) соединена с генератором/электродвигателем (5) через установленный между ними, по меньшей мере, один эпициклический редуктор (4).
8. Система по п.6, отличающаяся тем, что лебедка (3) оснащена направляющим модулем (6), выполненным с возможностью принудительного, упорядоченного наматывания троса (2) на лебедку (3).
9. Система по п.1, отличающаяся тем, что передаточная система содержит, по меньшей мере, одну пару механизмов для ослабления резких изменений нагрузки, установленную между второй (7b) и третьей (7d) парами блоков.
10. Система по п.9, отличающаяся тем, что механизм для ослабления состоит, по меньшей мере, из одного упругого элемента (17), прикрепленного одним из его концов (17а) к базовой платформе (1), а другой его конец соединен с участком троса (2) далее по ходу от направляющего модуля (6) посредством введения четвертого блока (7с).
11. Система по п.1, отличающаяся тем, что натяжное устройство (18) состоит из первого (19а) и второго (19b) шкивов, при этом шкивы (19а, 19b) обращены друг к другу и имеют копланарные оси вращения, причем шкивы (19а, 19b) вращаются вокруг соответствующих первого (20а) и второго (20b) поворотных пальцев и вставлены между двумя захватами (21), причем первый поворотный палец (20а) скользит внутри пары прорезей (22), выполненных в захватах (21), при этом первый (20а) и второй (20b) пальцы соединены друг с другом посредством упругого элемента (23).
12. Система по п.1, отличающаяся тем, что блок (6а) скольжения выполнен с возможностью скольжения вдоль рельса (6b) параллельно оси вращения лебедки (3), причем скольжение блока (6а) скольжения по рельсу (6b) управляется механизмом скольжения совместно с вращением лебедки (3).
13. Система по п.12, отличающаяся тем, что механизм скольжения приводится в действие электродвигателем, управляемым посредством интеллектуальной системы управления.
14. Система по п.12, отличающаяся тем, что механизм скольжения управляется винтом или ремнем.
15. Система по п.3, отличающаяся тем, что интеллектуальная система управления выполнена с возможностью воздействия на лебедки (3) для направления профиля (30) крыла по траектории полета для реализации заданного алгоритма, определяющего в каждый момент оптимальное положение, которое должен занять профиль (30) крыла, по меньшей мере, в один последующий момент в зависимости от полета и параметров управления согласно информации группы датчиков, расположенных на профиле (30) крыла, и набором наземных датчиков, обеспечивая приоритет использованию подъемной силы (L), создаваемой ветровым потоком (W).
16. Способ вырабатывания электрической энергии посредством ветровой системы по любому одному из предшествующих пунктов, отличающийся тем, что он содержит этапы, на которых:
a) управляют (F1) траекторией полета профиля (30) крыла для доведения до максимума энергии, отбираемой у ветрового потока (W), при этом профиль (30) крыла при наборе высоты натягивает тросы (2), соединенные с базовой платформой (1), которые приводят лебедки (3) во вращение;
b) приводят в действие (F2) профиль (30) крыла для достижения им положения, близкого к сваливанию;
c) повторно наматывают (F3) тросы (2) лебедками (3) посредством двигателей (5) и располагают профиль (30) крыла для возврата к состоянию максимальной тяги;
d) повторяют предыдущие стадии.
17. Способ по п.16, отличающийся тем, что этапы а), и/или b), и/или с), и/или d) производят автоматически посредством интеллектуальной системы управления.
18. Применение ветровой системы по п.1 для буксирования судна (100) посредством преобразования ветровой энергии в механическую энергию, при этом передаточную систему располагают на носу (101) судна (100), а профиль (30) крыла приводят в действие посредством интеллектуальной системы управления, чтобы он всегда находился перед судном (100).
| US 3987987 А, 26.10.1976 | |||
| US 2005046197 A1, 03.03.2005 | |||
| EP 0841480 A1, 13.05.1998 | |||
| Штамм Limosilactobacillus mucosae KSAU-19 BKM B-3751D - продуцент антибактериальных веществ | 2024 |
|
RU2839918C1 |
| Ветроэнергетическая установка | 1985 |
|
SU1302011A1 |
| US 5931416 A, 03.08.1999. | |||

