Изобретение относится к области электротехники, в частности - к электрическим силовым установкам транспортных машин, преимущественно беспилотных.
Транспортные машины с электрическими силовыми установками, такие как гибридные автомобили с двигателями внутреннего сгорания или топливными элементами, электромобили и электробусы, находят все более широкое применение. В их состав входят аккумуляторные батареи, эффективность использования которых в значительной мере определяет стоимостные и технические характеристики транспортных машин.
Известны способы управления энергопотреблением в гибридных транспортных машинах (WO 2013/131735 A3; U.S. Pat. №8,606,513 В2; U.S. Pat. №10,131,341 В2) основанные на учете особенностей движения машин в различных дорожных условиях. Указанные способы позволяют повысить эффективность использования аккумуляторных батарей, однако в недостаточной мере. Это связано с тем, что аккумуляторные батареи обладают относительно невысокой удельной мощностью, и необходимо увеличивать их массу чтобы обеспечить достаточно интенсивный разгон или рекуперативное торможение транспортной машины.
Известны системы аккумулирования энергии для электрических силовых установок транспортных машин, включающие в себя комбинацию двух накопителей электроэнергии: первый представляет собой аккумуляторную батарею (вторичный химический источник тока), обладающую высокой удельной энергией, второй - конденсаторную батарею (батарею конденсаторов с двойным электрическим слоем, именуемых также суперконденсаторами), обладающую высокой удельной мощностью. При этом используются различные средства и способы распределения энергии между аккумуляторной и конденсаторной батареями (U.S. Pat. №5,373,195; U.S. Pat. №7,258,183 В2; U.S. Pat. №7,780,562 В2; U.S. Pat. №7,791,216 В2; U.S. Pat. №7,936,083 B2; U.S. Pat. №8,434,578 B2; U.S. Pat. №8,860,359 B2; U.S. Pat. №9,162,669 B2; U.S. Pat. №9,895,983 B2; U.S. Pat. №10,050,439 B2; U.S. Pat. №10,293,702 B2).
В вышеперечисленных технических решениях отдача/прием энергии конденсаторной батареей происходят как реакция на текущую потребность, возникающую при разгоне либо рекуперативном торможении транспортной машины, причем количество запасенной в конденсаторной батарее энергии отклоняется от заранее установленного исходного уровня Е0 в меньшую либо большую сторону, а затем возвращается к нему; эксплуатационная энергоемкость конденсаторной батареи составляет
Ecb=Emax-Emin=Eret+Erec,
где Emax, Emin - соответственно максимально и минимально допустимые уровни запасаемой конденсаторной батареей энергии, Eret=Е0-Emin - потенциальная потребность в отдаваемой конденсаторной батареей энергии, Erec=Emax-Е0 - потенциальная потребность в принимаемой конденсаторной батареей энергии. Общий недостаток этих решений заключается в неэффективном использовании конденсаторной батареи, которая должна обладать существенным (до двукратного при Eret=Erec) избытком эксплуатационной энергоемкости по отношению к потенциальной потребности в отдаваемой или принимаемой ею энергии.
Из числа вышеперечисленных технических решений в качестве прототипа заявляемого изобретения выбраны способ и система аккумулирования энергии транспортной машины (U.S. Pat. №7,791,216 В2). Данная система входит в состав электрической силовой установки транспортной машины и состоит из силовой части и контроллера, содержащего средства оценки состояний силовой части, средства управления и информационный интерфейс, причем силовая часть содержит силовые клеммы системы (шину для подключения к электроприводу ведущих колес), аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что
Pout=Pab+Pcb-Pc,
где Pout - выходная электрическая мощность системы аккумулирования энергии, измеренная на ее силовых клеммах, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки на управляющем входе конвертера.
Управление в прототипе осуществляют так, что соотношение мощностей Pab, Pcb и Рс определяется количеством энергии Е, запасенной в конденсаторной батарее, в частности, при Pout>0:
- если Е1<Е, то Pab=0, Pcb>0, Рс=0;
- если Е2<Е<Е1, то Pab>0, Pcb>0, Рс>0;
- если Е<Е2, то Pab>0, Pcb=0, Рс>0,
где Е1, Е2 - пороговые уровни.
Таким образом, в прототипе процесс отдачи/приема энергии включает в себя этапы, на которых вся выходная электрическая мощность системы аккумулирования энергии обеспечивается исключительно конденсаторной, либо аккумуляторной батареями - потери энергии на внутренних сопротивлениях батарей пропорциональны квадрату их выходных токов и могут быть минимизированы за счет равномерного распределения этих токов, что не выполняется в данном случае.
Задачами заявляемого изобретения являются уменьшение веса и стоимости системы аккумулирования энергии, увеличение ее ресурса.
Технические результаты, позволяющие решить поставленную задачу: снижение энергоемкости конденсаторной батареи, улучшение режимов работы конвертера, аккумуляторной и конденсаторной батарей за счет минимизации потерь энергии в них.
Технические результаты достигаются тем, что в системе аккумулирования энергии (именуемой далее система), состоящей из силовой части, средств оценки состояний силовой части и средств управления, оснащенных информационным интерфейсом, причем силовая часть содержит силовые клеммы системы, аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что
Pout=Pab+Pcb-Pc,
где Pout - выходная электрическая мощность системы, измеренная на ее силовых клеммах, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки Ref на управляющем входе конвертера, согласно заявляемому изобретению в состав средств управления введены массив входных данных и программа оптимального управления, причем:
- массив входных данных имеет возможность заполнения через информационный интерфейс и содержит прогноз Pf мощности Pout;
- программа оптимального управления связана с массивом входных данных, средствами оценки состояний силовой части и управляющем входом конвертера и служит для формирования уставки Ref, минимизирующей значение функции W от потерь энергии, ожидаемых в период упреждения прогноза Pf.
Система может быть реализована так, что формирование уставки Ref заключается в выборе одного из множества прогнозных вариантов ее изменения, основанном на методах динамического программирования, причем критерием выбора является минимум значения функции
W=Wab+k1⋅Wcb+k2⋅Wc,
где k1, k2 - весовые коэффициенты, Wab - величина потерь энергии на внутреннем сопротивлении аккумуляторной батареи, Wcb - величина потерь энергии на внутреннем сопротивлении конденсаторной батареи, Wc - величина потерь энергии в конвертере.
В схеме конвертера могут использоваться полумосты, каждый из которых имеет управляющий вход полумоста, первый ключ, второй ключ, плюсовой вывод, минусовой вывод и переключаемый вывод, плюсовой вывод связан с переключаемым выводом через первый ключ, минусовой вывод связан с переключаемым выводом через второй ключ, переключаемый вывод имеет возможность подключения к плюсовому либо минусовому выводу по сигналу на управляющем входе полумоста.
Первый вариант конвертера содержит два полумоста, дроссель с датчиком тока дросселя и регулятор, причем:
- плюсовой и минусовой выводы первого полумоста подключены параллельно к аккумуляторной батарее, минусовой вывод первого полумоста соединен с минусовым выводом второго полумоста, переключаемый вывод первого полумоста через дроссель соединен с переключаемым выводом второго полумоста, плюсовой и минусовой выводы которого подключены параллельно к конденсаторной батарее;
- регулятор имеет три входа и два выхода, на первый вход регулятора от средств оценки состояний силовой части подан сигнал общей обратной связи по напряжению разомкнутой цепи конденсаторной батареи, второй вход регулятора является управляющим входом конвертера, на третий вход регулятора подан сигнал местной обратной связи от датчика тока дросселя, выходы регулятора подключены к управляющим входам полумостов.
В первом варианте конвертера силовыми клеммами системы могут являться плюсовой и минусовой выводы любого из двух полумостов.
Второй вариант конвертера содержит полумост, дроссель с датчиком тока дросселя и регулятор, причем:
- плюсовой и минусовой выводы полумоста являются силовыми клеммами системы аккумулирования энергии, минусовой вывод полумоста соединен с минусовым выводом аккумуляторной батареи, переключаемый вывод полумоста через дроссель соединен с плюсовым выводом аккумуляторной батареи и минусовым выводом конденсаторной батареи, плюсовой вывод которой соединен с плюсовым выводом полумоста;
- регулятор имеет три входа и выход, на первый вход регулятора от средств оценки состояний силовой части подан сигнал общей обратной связи по напряжению разомкнутой цепи конденсаторной батареи, второй вход регулятора является управляющим входом конвертера, на третий вход регулятора подан сигнал местной обратной связи от датчика тока дросселя, выход регулятора подключен к управляющему входу полумоста.
Регулятор в обоих вариантах конвертера выполнен так, чтобы сигнал общей обратной связи на первом входе регулятора стремился к уставке Ref на втором входе регулятора.
Система может быть размещена на электромобиле, имеющем средства навигации и оценки дорожной обстановки, причем в состав средств управления введена программа циклического формирования прогноза Pf, построенная на основе анализа данных средств навигации и оценки дорожной обстановки.
Указанный электромобиль, может содержать теплоизоляционный отсек, при этом:
- аккумуляторная батарея имеет емкость, обеспечивающую не более 100 километров пробега электромобиля без подзарядки, и размещена в теплоизоляционном отсеке так, чтобы обеспечивалась возможность ее оперативной замены;
- на территории предполагаемой эксплуатации электромобиля размещена сеть станций для оперативной замены аккумуляторных батарей и их зарядки, совмещенной с подогревом либо охлаждением аккумуляторных батарей до оптимальных рабочих температур.
При управлении системой, содержащей аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что
Pout=Pab+Pcb-Pc,
где Pout - выходная электрическая мощность системы, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки Ref на управляющем входе конвертера, согласно заявляемому способу задают конечное множество U значений напряжения и затем циклически выполняют следующие действия:
- формируют прогноз Pf мощности Pout и разбивают период упреждения прогноза Pf на множество интервалов времени;
- на каждом интервале времени формируют множество прогнозных вариантов изменения напряжения разомкнутой цепи конденсаторной батареи так, чтобы на границах интервала времени величина этого напряжения принадлежала заданному конечному множеству U, причем для каждого варианта вычисляют потерю w, соответствующую выполнению прогноза Pf, по формуле
w=wab+k1⋅wcb+k2⋅wc,
где k1, k2 - весовые коэффициенты, wab - величина потерь энергии на внутреннем сопротивлении аккумуляторной батареи, wcb - величина потерь энергии на внутреннем сопротивлении конденсаторной батареи, wc - величина потерь энергии в конвертере;
- из множества сформированных прогнозных вариантов выбирают последовательность, которая образует непрерывную функцию uf(t) при минимальной сумме потерь w, затем подают на управляющий вход конвертера такую уставку Ref, что величина напряжения разомкнутой цепи конденсаторной батареи стремится к uf(t).
Заявляемый способ управления может применяться так, что циклическое выполнение указанных действий осуществляют с периодом повторения, многократно меньшим, чем период упреждения прогноза Pf.
Заявляемый способ управления может применяться на электромобиле со средствами навигации, данные которых используют для составления маршрута, и средствами оценки дорожной обстановки, данные которых используют для прогнозирования графика движения электромобиля по маршруту, а формирование прогноза Pf осуществляют по формуле
Pf=(m⋅v⋅dv/dt+m⋅g⋅dh/dt+Pw)/η,
где m - масса электромобиля, v, h - прогнозируемые скорость и высота положения электромобиля, g -- ускорение свободного падения, Pw - прогнозируемая мощность потерь, обусловленных трением качения и аэродинамическим сопротивлением электромобиля, η - коэффициент полезного действия электропривода ведущих колес электромобиля, причем период упреждения прогноза Pf задают так, чтобы он превышал величину
(Emax-Emin)/Pav,
где Emax, Emin - максимально и минимально возможный запасы энергии конденсаторной батареи, Pav - средняя мощность Pout при движении электромобиля по магистральной дороге с качественным покрытием.
Существенные признаки заявляемого решения влияют на достижение технического результата следующим образом:
Аккумуляторная батарея имеет высокую удельную энергию, а конденсаторная батарея - высокую удельную мощность. Система, обладающая высокими удельными показателями энергии и мощности, состоит из силовой части, средств оценки состояний силовой части и средств управления, причем силовая часть содержит силовые клеммы системы, аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны определенным образом. Перечисленные признаки известны из существующего уровня техники и открывают потенциальную возможность для оптимизации процесса распределения выходной электрической мощности системы между аккумуляторной и конденсаторной батареями.
Новый признак: «массив входных данных… содержит прогноз Pf мощности Pout» позволяет планировать отдачу или прием энергии конденсаторной батареей не только как реакцию на текущую потребность, возникающую при всплесках выходной электрической мощности системы, но и подготавливать конденсаторную батарею к таким всплескам, а именно - разряжать ее перед приемом энергии, либо заряжать перед отдачей энергии. При этом конденсаторная батарея будет использоваться максимально эффективно, так как ее эксплуатационная энергоемкость не будет избыточной по отношению к потенциальной потребности в отдаваемой или принимаемой энергии.
Реализация вышеуказанной возможности обеспечивается новым признаком: «программа оптимального управления… для формирования уставки Ref, минимизирующей значение функции W от потерь энергии, ожидаемых в период упреждения прогноза Pf».
Алгоритм формирования раскрыт в признаке: «формирование уставки Ref заключается в выборе одного из множества прогнозных вариантов ее изменения, основанном на методах динамического программирования». Последние широко известны (Беллман Р. // Динамическое программирование. - М.: Издательство иностранной литературы, 1960.; Кормен Т., Лейзерсон Ч., Ривест Р., Штайн К. // Алгоритмы: построение и анализ. - М.: Вильяме, 2005.).
Признак: «минимум значения функции
W=Wab+k1⋅Wcb+k2⋅Wc,
где k1, k2 - весовые коэффициенты,, Wab - величина потерь энергии на внутреннем сопротивлении аккумуляторной батареи, Wcb - величина потерь энергии на внутреннем сопротивлении конденсаторной батареи, Wc - величина потерь энергии в конвертере» раскрывает один из возможных критериев выбора. Для специалиста в данной области техники должно быть понятно, что весовые коэффициенты задаются в зависимости от конкретных параметров системы, в частности, указанные коэффициенты могут быть приравнены к нулю если рабочие температуры конденсаторной батареи и конвертера не превышают безопасного уровня. В этом случае будет максимально улучшен режим работы аккумуляторной батареи за счет минимизации потерь энергии на ее внутреннем сопротивлении. Так как аккумуляторная батарея является наиболее тяжелым, дорогостоящим и недолговечным элементом системы, будут решены поставленные задачи уменьшения веса, стоимости, и увеличения ресурса системы.
Признаки, раскрывающие варианты построения конвертера известны из существующего уровня техники и являются поясняющими.
Признаки: «Система… размещена на электромобиле, имеющем средства навигации и оценки дорожной обстановки, причем в состав средств управления введена программа циклического формирования прогноза Pf, построенная на основе анализа данных средств навигации и оценки дорожной обстановки» очевидны для специалиста в данной области техники и являются поясняющими.
Введение признака: «аккумуляторная батарея… размещена в теплоизоляционном отсеке» стало возможным благодаря минимизации потерь энергии на внутреннем сопротивлении аккумуляторной батареи. При минимальных потерях энергии теплоемкость аккумуляторной батареи достаточна для предотвращения ее перегрева, что исключает потребность в принудительном охлаждении. За счет размещения аккумуляторной батареи в теплоизоляционном отсеке уменьшается воздействие таких вредных факторов, как пониженная или повышенная температура окружающего воздуха.
Введение признака: «аккумуляторная батарея имеет емкость, обеспечивающую не более 100 километров пробега электромобиля без подзарядки» стало возможным за счет снижения требований к мощности аккумуляторной батареи (благодаря наличию конденсаторной батареи). Низкая емкость аккумуляторной батареи позволяет сделать ее легкой и небольшой, то есть реализовать признак: «аккумуляторная батарея... размещена… так, чтобы обеспечивалась возможность ее оперативной замены».
Признак: «на территории предполагаемой эксплуатации электромобиля размещена сеть станций для оперативной замены аккумуляторных батарей и их зарядки…» очевиден для специалиста в данной области техники и является поясняющим.
Новый признак: «…зарядки, совмещенной с подогревом либо охлаждением аккумуляторных батарей до оптимальных рабочих температур» позволяет (в совокупности с размещением аккумуляторной батареи в теплоизоляционном отсеке) улучшить режим работы аккумуляторной батареи.
Новая совокупность признаков способа управления: «задают конечное множество U значений напряжения… разбивают период упреждения прогноза Pf на множество интервалов времени;
- на каждом интервале времени формируют множество прогнозных вариантов изменения напряжения разомкнутой цепи конденсаторной батареи так, чтобы на границах интервала времени величина этого напряжения принадлежала заданному конечному множеству U, причем для каждого варианта вычисляют потерю w…;
- из множества сформированных прогнозных вариантов выбирают последовательность, которая образует непрерывную функцию uf(t) при минимальной сумме потерь w» позволяет свести задачу поиска оптимального управления к известной задаче поиска кратчайшего пути в ориентированном ациклическом графе (см. стр. 197 в кн. Кристофидес Н. // Теория графов. Алгоритмический подход.- М.: Мир, 1978.).
Признак: «циклическое выполнение указанных действий осуществляют с периодом повторения, многократно меньшим, чем период упреждения прогноза Pf» позволяет вносить своевременные корректировки в процесс распределения мощности при изменении прогноза Pf.
Способ формирования прогноза Pf раскрыт в признаках, характеризующих заявляемое решение применительно к электромобилю, преимущественно беспилотному - в данном случае способ наиболее прост и приведен в качестве поясняющего примера. Область применения заявляемого решения не исчерпывается приведенным примером. В частности, формирование прогнозов выходной электрической мощности систем, предназначенных для гибридных транспортных машин, промышленных приводов, устройств автономной электроэнергетики и др. относится к отдельным задачам, которые не являются предметом данной заявки. Достижение технического результата в заявляемом решении обеспечивается независимо от способа формирования прогноза выходной электрической мощности системы.
Таким образом, заявляемое техническое решение содержит признаки, неизвестные из уровня техники и влияющие на достижение технического результата, то есть, соответствует критериям «новизна» и «изобретательский уровень».
Заявляемое техническое решение поясняется чертежами.
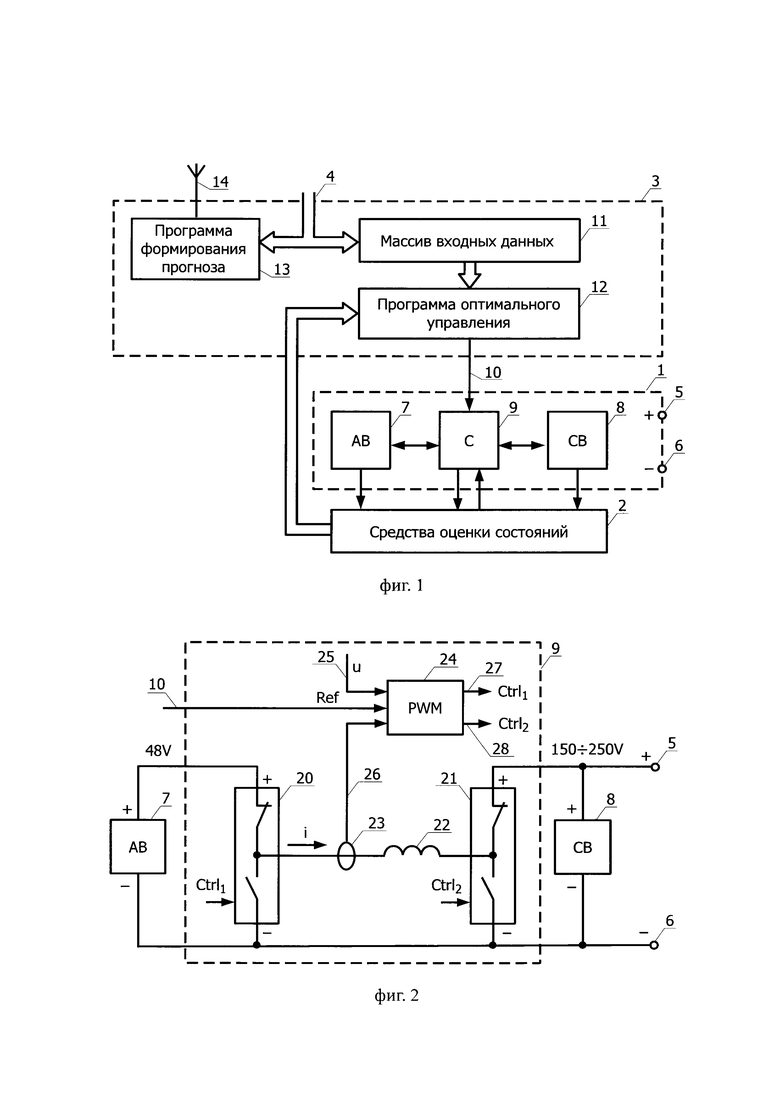
Фиг. 1 содержит структурную схему системы.
Фиг. 2, 3, 4 содержат варианты схем силовой части системы.
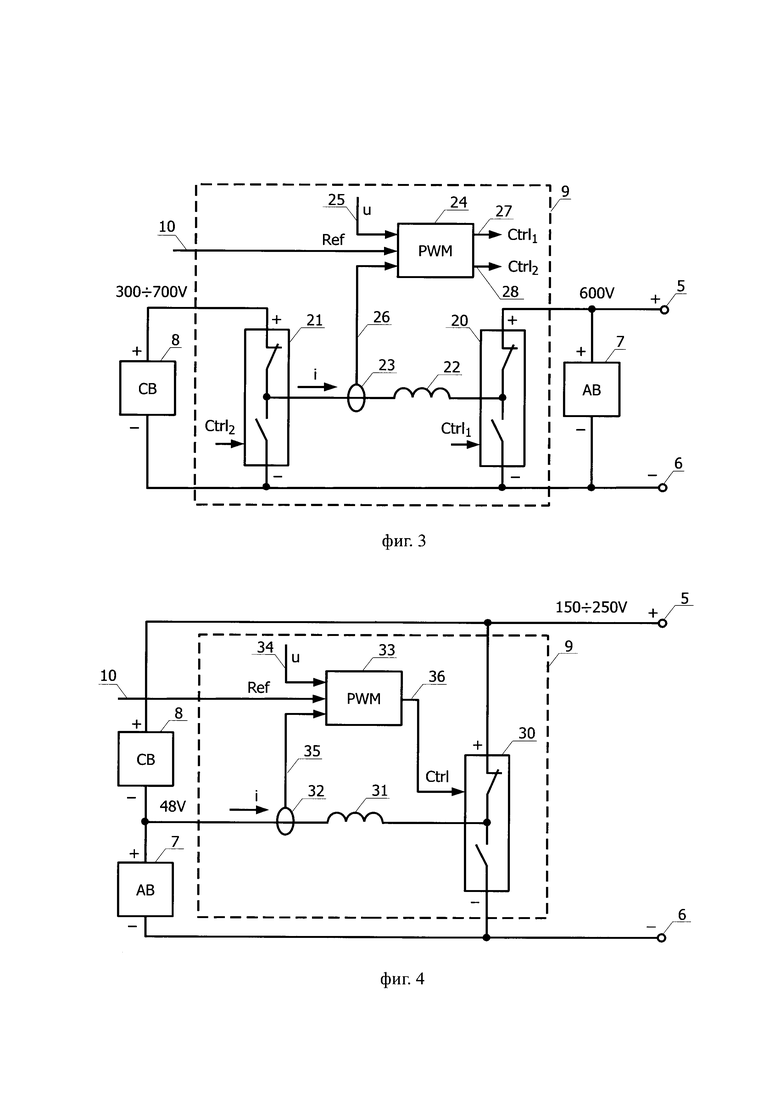
Фиг. 5 иллюстрирует процесс оптимального управления.
Фиг. 6 иллюстрирует путь в ориентированном ациклическом графе.
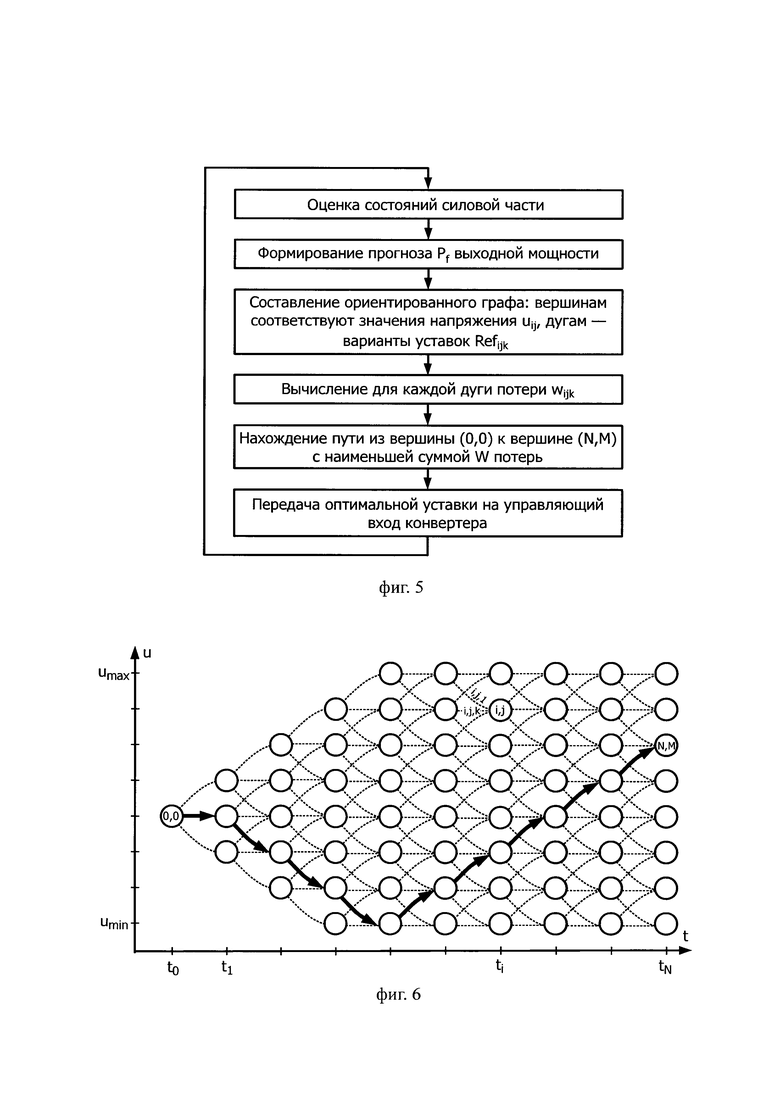
Фиг. 7 иллюстрирует пример реализации способа управления.
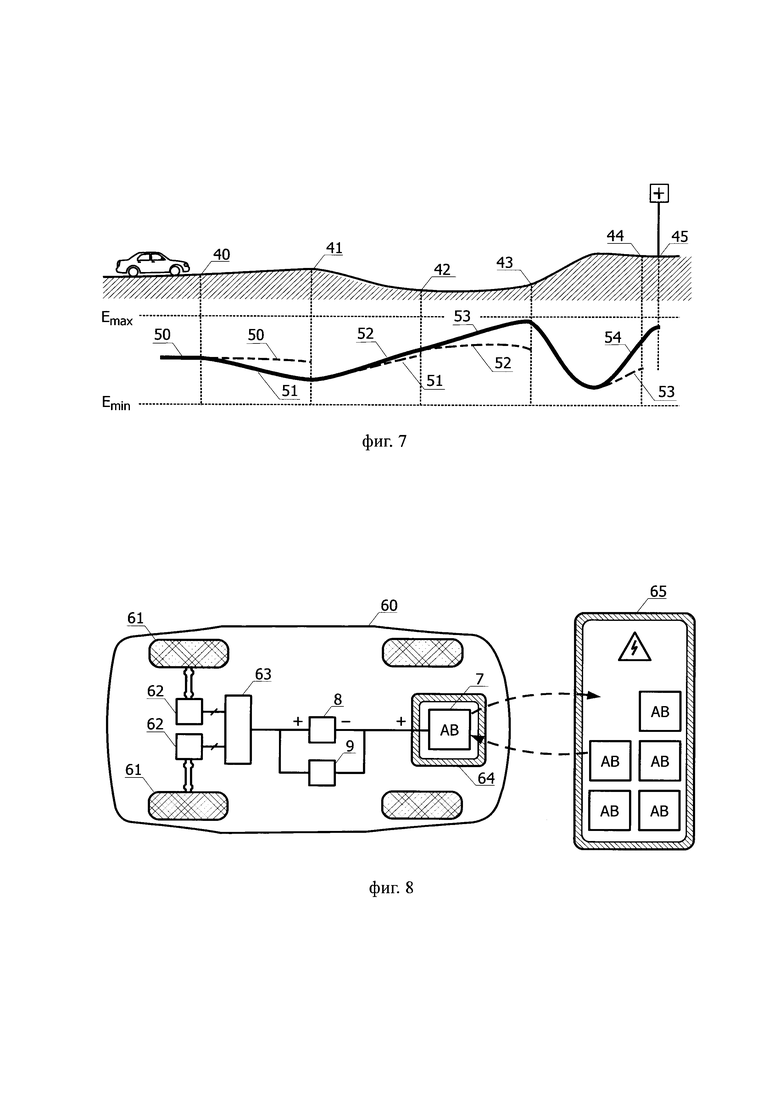
Фиг. 8 иллюстрирует вариант беспилотного электромобиля.
На структурной схеме (фиг. 1) представлены:
- силовая часть 1;
- средства 2 оценки состояний силовой части;
- средства 3 управления с информационным интерфейсом 4;
- плюсовая 5 и минусовая 6 силовые клеммы системы;
- аккумуляторная батарея 7;
- конденсаторная батарея 8;
- конвертер 9 с управляющим входом 10 конвертера;
- массив 11 входных данных;
- программа 12 оптимального управления;
- программа 13 циклического формирования прогноза выходной электрической мощности системы;
- средства 14 навигации и оценки дорожной обстановки.
Аккумуляторная батарея 7 связана с конденсаторной батареей 8 через конвертер 9, указанные элементы в совокупности с клеммами 5, 6 образуют силовую часть 1, для управления которой служит управляющий вход 10 конвертера; силовая часть 1 связана со средствами 2 оценки состояний силовой части.
Средства 2 оценки состояний силовой части содержат, по меньше мере:
- средства оценки напряжения разомкнутой цепи и внутреннего сопротивления аккумуляторной батареи 7;
- средства оценки напряжения разомкнутой цепи и внутреннего сопротивления конденсаторной батареи 8.
Для оценки состояний могут использоваться известные алгоритмы, такие как фильтр Калмана или наблюдатель Люенбергера (Андреев Ю. Н. // Управление конечномерными линейными объектами.- М.: Главная редакция физико-математической литературы издательства «Наука», 1976.).
В состав средств 3 управления входят массив 11 входных данных, программа 12 оптимального управления, программа 13 циклического формирования прогноза выходной электрической мощности системы; программа 13 имеет возможность получения данных от средств 14 навигации и оценки дорожной обстановки, а также записи данных в массив 11 через информационный интерфейс 4; программа 12 имеет возможность получения данных из массива 11 и от средств 2 оценки состояний силовой части, а также передачи данных на управляющий вход 10 конвертера.
На схемах (фиг. 2, 3) представлена силовая часть 1 с первым вариантом конвертера 9, в состав которого входят:
- первый и второй полумосты 20,21, каждый их которых имеет вход управления, плюсовой вывод, минусовой вывод и переключаемый вывод;
- дроссель 22 с датчиком 23 тока дросселя;
- регулятор 24 с тремя входами 25, 10, 26 и выходами 27, 28.
На первый вход 25 регулятора подан сигнал общей обратной связи по напряжению и разомкнутой цепи конденсаторной батареи, второй вход регулятора является задающим входом 10 конвертера, на третий вход 26 регулятора подан сигнал местной обратной связи от датчика 23 тока дросселя, выходы 27, 28 регулятора подключены ко входам управления полумостов; плюсовой и минусовой выводы первого полумоста 20 подключены параллельно к аккумуляторной батарее 7, минусовой вывод первого полумоста 20 соединен с минусовым выводом второго полумоста 21, переключаемый вывод первого полумоста 20 через дроссель 22 соединен с переключаемым выводом второго полумоста 21, плюсовой и минусовой выводы которого подключены параллельно к конденсаторной батарее 8.
В силовой части 1, содержащей первый вариант конвертера, силовыми клеммами 5, 6 системы могут являться: плюсовой и минусовой выводы второго полумоста 21 (как показано на фиг. 2), либо плюсовой и минусовой выводы первого полумоста 20 (как показано на фиг. 3).
На схеме (фиг. 4) представлена силовая часть 1 со вторым вариантом конвертера 9, в состав которого входят:
- полумост 30, который имеет вход управления, плюсовой вывод, минусовой вывод и переключаемый вывод;
- дроссель 31 с датчиком 32 тока дросселя;
- регулятор 33 с тремя входами 34, 10, 35 и выходом 36.
На первый вход 34 регулятора подан сигнал общей обратной связи по напряжению и разомкнутой цепи конденсаторной батареи, второй вход регулятора является управляющим входом 10 конвертера, на третий вход 36 регулятора подан сигнал местной обратной связи от датчика 32 тока дросселя, выход 36 регулятора подключен ко входу управления полумоста 30; плюсовой и минусовой выводы полумоста 30 являются силовыми клеммами 5, 6 системы, минусовой вывод полумоста 30 соединен с минусовым выводом аккумуляторной батареи 7, переключаемый вывод полумоста 30 через дроссель 31 соединен с плюсовым выводом аккумуляторной батареи 7 и минусовым выводом конденсаторной батареи 8, плюсовой вывод которой соединен с плюсовым выводом полумоста 30.
Выбор варианта силовой части 1 определяется конкретными параметрами системы:
- в тех случаях, когда выходная мощность конденсаторной батареи 8 существенно (более чем в 3 раза) превышает мощность аккумуляторной батареи 7 (например в гибридном автомобиле) предпочтительнее схема, представленная на фиг. 2;
- в тех случаях, когда выходная мощность конденсаторной батареи 8 приблизительно равна мощности аккумуляторной батареи 7 (например в электробусе) предпочтительнее схема, представленная на фиг. 3;
- в остальных случаях (например в электромобиле) предпочтительнее схема, представленная на фиг. 4.
Во всех указанных вариантах принцип работы конвертера 9 одинаков, и поясняется на примере схемы фиг. 4:
При подаче с выхода 36 регулятора на вход управления полумоста 30 периодических прямоугольных импульсов, переключаемый вывод полумоста 30 периодически подключается к его плюсовому либо минусовому выводам. При этом среднее напряжение на переключаемом выводе полумоста 30 зависит от скважности импульсов на выходе 36 регулятора. Изменение тока дросселя 31 определяется разностью напряжений на его выводах и, следовательно, также зависит от скважности импульсов на выходе 36 регулятора. Ток дросселя влияет на распределение выходной электрической мощности системы между аккумуляторной 7 и конденсаторной 8 батареями. Напряжение и разомкнутой цепи конденсаторной батареи 8 изменяется в зависимости от ее выходной электрической мощности. Регулятор 33, выполнен так, что напряжение и на входе 34 стремится к уставке Ref на входе 10. Принцип работы регулятора известен и не требует дополнительных пояснений.
Пример осуществления заявляемого способа управления проиллюстрирован на фиг. 5, 6 и описан ниже.
Программа 12 получает от средств 2 данные о состоянии силовой части (напряжение разомкнутой цепи и внутреннее сопротивление аккумуляторной 7 и конденсаторной 8 батарей), а из массива 11 прогноз Pf выходной электрической мощности системы. Отметим, что внутреннее сопротивление конденсаторной батареи 8, а также напряжение разомкнутой цепи и внутреннее сопротивление аккумуляторной батареи 7 изменяются достаточно медленно, и в период упреждения прогноза Pf их можно считать постоянными. Программа 12 решает задачу поиска оптимального управления, используя следующий алгоритм:
1) Внутри рабочего диапазона (umin, umax) задают конечное множество U значений напряжения разомкнутой цепи конденсаторной батареи.
2) Разбивают период упреждения прогноза Pf на интервалы времени (ti-1, ti), где i - номер интервала от 1 до N.
3) На каждом интервале времени формируют множество прогнозных вариантов Refijk изменения уставки Ref. В соответствии с принципом работы конвертера, напряжение разомкнутой цепи конденсаторной батареи должно стремиться к уставке Ref - формирование прогнозных вариантов осуществляют так, чтобы каждому моменту времени ti соответствовали значения uij напряжения разомкнутой цепи конденсаторной батареи из заданного конечного множества U.
4) Для каждого прогнозного варианта Refijk вычисляют потерю wijk (например - величину потерь энергии на внутреннем сопротивлении аккумуляторной батареи) соответствующую выполнению прогноза Pf, используя данные о состоянии силовой части и ее математическую модель.
5) Представляют прогнозные варианты в виде ориентированного ациклического графа (фиг. 6) с множеством вершин (i, j) и множеством дуг (i,j, k). Дуги (i,j,k) направлены к вершине (i,j) из вершин (i-1, j'), индекс k принимает значения от 1 до K, где K - количество дуг, направленных к вершине (i, j). Вершинам соответствуют значения uij, дугам - Refijk и wijk.
6) Последовательно увеличивая i от 1 до N, присваивают вершинам (i, j) пометки W (i, j), равные минимальной сумме потерь на пути к ним:

где (i, j, k) пробегает множество всех дуг, направленных к вершине (i, j), W(i-1, j') - пометки, ранее присвоенные вершинам, из которых направлены дуги (i, j, k), W (0, 0)=0 - пометка, присвоенная началу графа. Из всех вершин (N, j) выбирают одну (N, М) с наименьшей пометкой. Из всех дуг (N, М, k), выбирают одну (N, М, L), удовлетворяющую формуле (1). Дуга (N, М, L) лежит на пути с наименьшей суммой потерь.
7) Последовательно продвигаясь от вершины (N, М) к вершине (0, 0) по дугам, удовлетворяющим формуле (1) получают путь с наименьшей суммой потерь (отмечен на фиг. 6 стрелками). Данному пути соответствует последовательность уставок Refijk, которая обеспечивает оптимальное управление, и передается программой 12 на управляющий вход 10 конвертера.
В связи с возможными непрогнозируемыми изменениями дорожной обстановки цикл, представленный на фиг. 5, должен осуществляться как можно чаще - во избежание существенных расхождений между выходной электрической мощностью Pout и ее прогнозом Pf.
На фиг. 7 представлен пример работы системы при движении электромобиля. Маршрут движения разделен на участки пунктами 40, 41, 42, 43, 44, 45. В каждом пункте производится обновление прогноза. Периоды упреждения прогнозов пересекаются (каждому из них соответствует по два участка маршрута). График энергии (Е=С⋅u2/2), запасенной в конденсаторной батарее (сплошная утолщенная линия) образован множеством пересекающихся фрагментов, соответствующих различным участкам маршрута:
- фрагмент 50 соответствует участку до пункта 41;
- фрагмент 51 соответствует участку 40÷42;
- фрагмент 52 соответствует участку 41÷43;
- фрагмент 53 соответствует участку 42÷44;
- фрагмент 54 соответствует участку 43÷45.
Уставка Ref на управляющем входе конвертера формируется на основании самого последнего прогноза, при этом происходит обновление графика Е, который может отличаться от предыдущего (пунктирная линия):
- прогноз, сформированный в пункте 40 учитывает спуск электромобиля на участке 41÷42, поэтому на участке 40+41 обновленный фрагмент 51 ниже предыдущего фрагмента 50, что обеспечивает подготовку конденсаторной батареи к приему энергии на спуске;
- участок 42÷43 не содержит существенных изменений рельефа, а также не предполагает разгона/торможения электромобиля, поэтому на участке 41÷42 обновленный фрагмент 52 мало отличается от предыдущего фрагмента 51;
- прогноз, сформированный в пункте 42 учитывает подъем электромобиля на участке 43÷44, поэтому на участке 42÷43 обновленный фрагмент 53 выше предыдущего фрагмента 52, что обеспечивает подготовку конденсаторной батареи к отдаче энергии на подъеме;
- прогноз, сформированный в пункте 43 учитывает торможение электромобиля перед перекрестком 45, поэтому на участке 43÷44 обновленный фрагмент 54 выше предыдущего фрагмента 53.
Таким образом, программа оптимального управления учитывает не только текущие потребности в выходной электрической мощности системы, но и те потребности, которые могут возникнуть в ближайшей перспективе.
Вариант беспилотного электромобиля 60 (фиг. 8) имеет ведущие колеса 61, механически связанные с электрическими машинами 62. Электрические машины 62 подключены к AC/DC преобразователям 63, для питания которых используется система аккумулирования энергии с вариантом силовой части, представленным на фиг. 4. Электромобиль 60 содержит теплоизоляционный отсек 64 в котором размещена аккумуляторная батарея 7.
Данный вариант позволяет решить две основные проблемы, присущие электромобилям, - это длительное время зарядки и ненадежная работа при отрицательных температурах окружающего воздуха. Благодаря существенному снижению потерь энергии на внутреннем сопротивлении аккумуляторной батареи предлагаемый вариант позволяет, по сравнению с традиционными, сократить вес и размеры аккумуляторной батареи по меньшей мере втрое. При этом уменьшается пробег электромобиля без подзарядки, однако не происходит ухудшения его динамики. После разряда небольшая аккумуляторная батарея может быть легко и оперативно заменена насвежую.
Сеть станций 65 используется для оперативной роботизированной замены разряженных аккумуляторных батарей на свежие. Свежая (заряженная) аккумуляторная батарея имеет температуру электролита, близкую к оптимальной. За время небольшого пробега (не более 100 км) температура электролита аккумуляторной батареи 5, помещенной в теплоизоляционный отсек 61, не успевает существенно измениться, что повышает надежность работы аккумуляторной батареи зимой, а летом исключает необходимость ее принудительного охлаждения. Таким образом, предлагаемый вариант электромобиля 60 обеспечивает аккумулирование не только электрической, но и тепловой энергии.
Беспилотный электромобиль 60 предпочтительнее использовать в качестве городского такси, маршрут движения которого составляется автоматически и предусматривает посещение роботизированных пунктов для оперативной замены аккумуляторных батарей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2012 |
|
RU2513025C2 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОЙ МАШИНЫ | 2015 |
|
RU2596807C1 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2002 |
|
RU2222096C2 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2191709C2 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2127200C1 |
| Способ управления индукторной машиной | 2018 |
|
RU2694364C1 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2222098C2 |
| КОМПЛЕКТНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1996 |
|
RU2101200C1 |
| БОРТОВОЕ ЗАРЯДНОЕ УСТРОЙСТВО | 2012 |
|
RU2518914C1 |
| БОРТОВОЕ ЗАРЯДНОЕ УСТРОЙСТВО | 2014 |
|
RU2575669C2 |
Группа изобретений относится к системе аккумулирования энергии и способу управления ею. Система состоит из: силовой части, средств оценки состояний силовой части и средств управления, оснащенных информационным интерфейсом. Силовая часть содержит силовые клеммы системы аккумулирования энергии, аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что Pout=Pab+Pcb-Pc, где: Pout - выходная электрическая мощность системы аккумулирования энергии, измеренная на ее силовых клеммах, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки Ref на управляющем входе конвертера. При этом в состав средств управления введены массив входных данных и программа оптимального управления. Причем массив входных данных имеет возможность заполнения через информационный интерфейс и содержит прогноз Pf мощности Pout, а программа оптимального управления связана с массивом входных данных средствами оценки состояний силовой части и управляющим входом конвертера и служит для формирования уставки Ref, которая минимизирует значение функции W от потерь энергии, ожидаемых в период упреждения прогноза Pf. Достигается повышение эффективности системы аккумулирования энергии путем минимизации потерь энергии вследствие учета потребностей системы в выходной мощности, как текущих, так и предполагаемых в ближайшей перспективе. 2 н.п. и 7 з.п. ф-лы, 8 ил.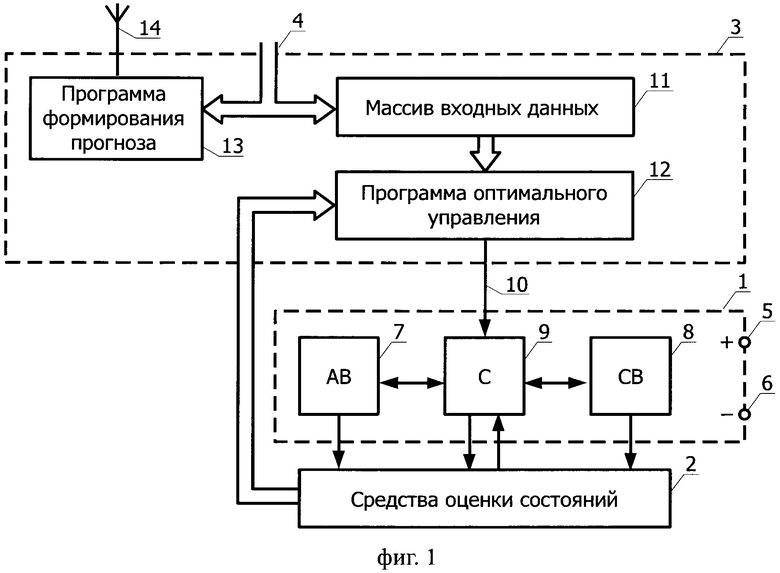
1. Система аккумулирования энергии, состоящая из силовой части, средств оценки состояний силовой части и средств управления, оснащенных информационным интерфейсом, причем силовая часть содержит силовые клеммы системы аккумулирования энергии, аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что
Pout=Pab+Pcb-Pc,
где Pout - выходная электрическая мощность системы аккумулирования энергии, измеренная на ее силовых клеммах, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки Ref на управляющем входе конвертера, отличающаяся тем, что в состав средств управления введены массив входных данных и программа оптимального управления, причем:
- массив входных данных имеет возможность заполнения через информационный интерфейс и содержит прогноз Pf мощности Pout;
- программа оптимального управления связана с массивом входных данных, средствами оценки состояний силовой части и управляющим входом конвертера и служит для формирования уставки Ref, минимизирующей значение функции W от потерь энергии, ожидаемых в период упреждения прогноза Pf.
2. Система по п. 1, отличающаяся тем, что формирование уставки Ref заключается в выборе одного из множества прогнозных вариантов ее изменения, основанного на методах динамического программирования, причем
W=Wab+k1⋅Wcb+k2⋅Wc,
где k1, k2 - весовые коэффициенты, Wab - величина потерь энергии на внутреннем сопротивлении аккумуляторной батареи, Wcb - величина потерь энергии на внутреннем сопротивлении конденсаторной батареи, Wc - величина потерь энергии в конвертере.
3. Система по п. 1, отличающаяся тем, что конвертер содержит два полумоста, дроссель с датчиком тока дросселя и регулятор, причем:
- каждый полумост имеет управляющий вход полумоста, первый ключ, второй ключ, плюсовой вывод, минусовой вывод и переключаемый вывод, плюсовой вывод связан с переключаемым выводом через первый ключ, минусовой вывод связан с переключаемым выводом через второй ключ, переключаемый вывод имеет возможность подключения к плюсовому либо минусовому выводу по сигналу на управляющем входе полумоста;
- плюсовой и минусовой выводы первого полумоста подключены параллельно к аккумуляторной батарее, минусовой вывод первого полумоста соединен с минусовым выводом второго полумоста, переключаемый вывод первого полумоста через дроссель соединен с переключаемым выводом второго полумоста, плюсовой и минусовой выводы которого подключены параллельно к конденсаторной батарее;
- плюсовой и минусовой выводы первого или второго полумостов являются силовыми клеммами системы аккумулирования энергии;
- регулятор имеет три входа и два выхода, на первый вход регулятора от средств оценки состояний силовой части подан сигнал общей обратной связи по напряжению разомкнутой цепи конденсаторной батареи, второй вход регулятора является управляющим входом конвертера, на третий вход регулятора подан сигнал местной обратной связи от датчика тока дросселя, выходы регулятора подключены к управляющим входам полумостов.
4. Система по п. 1, отличающаяся тем, что конвертер содержит полумост, дроссель с датчиком тока дросселя и регулятор, причем:
- полумост имеет управляющий вход, первый ключ, второй ключ, плюсовой вывод, минусовой вывод и переключаемый вывод, плюсовой вывод связан с переключаемым выводом через первый ключ, минусовой вывод связан с переключаемым выводом через второй ключ, переключаемый вывод имеет возможность подключения к плюсовому либо минусовому выводу по сигналу на управляющем входе полумоста;
- плюсовой и минусовой выводы полумоста являются силовыми клеммами системы аккумулирования энергии, минусовой вывод полумоста соединен с минусовым выводом аккумуляторной батареи, переключаемый вывод полумоста через дроссель соединен с плюсовым выводом аккумуляторной батареи и минусовым выводом конденсаторной батареи, плюсовой вывод которой соединен с плюсовым выводом полумоста;
- регулятор имеет три входа и выход, на первый вход регулятора от средств оценки состояний силовой части подан сигнал общей обратной связи по напряжению разомкнутой цепи конденсаторной батареи, второй вход регулятора является управляющим входом конвертера, на третий вход регулятора подан сигнал местной обратной связи от датчика тока дросселя, выход регулятора подключен к управляющему входу полумоста.
5. Система по п. 1, отличающаяся тем, что она размещена на электромобиле, имеющем средства навигации и оценки дорожной обстановки, причем в состав средств управления введена программа циклического формирования прогноза Pf, построенная на основе анализа данных средств навигации и оценки дорожной обстановки.
6. Система по п. 5, отличающаяся тем, что электромобиль содержит теплоизоляционный отсек, причем:
- аккумуляторная батарея имеет емкость, обеспечивающую не более 100 километров пробега электромобиля без подзарядки, и размещена в теплоизоляционном отсеке так, чтобы обеспечивалась возможность ее оперативной замены;
- на территории предполагаемой эксплуатации электромобиля размещена сеть станций для оперативной замены аккумуляторных батарей и их зарядки, совмещенной с подогревом либо охлаждением аккумуляторных батарей до оптимальных рабочих температур.
7. Способ управления системой аккумулирования энергии, содержащей аккумуляторную батарею, конденсаторную батарею и конвертер с управляющим входом конвертера, которые связаны так, что
Pout=Pab+Pcb-Pc,
где Pout - выходная электрическая мощность системы аккумулирования энергии, Pab - выходная электрическая мощность аккумуляторной батареи, Pcb - выходная электрическая мощность конденсаторной батареи, Рс - мощность потерь в конвертере, а соотношение мощностей Pab, Pcb и Рс зависит от уставки Ref на управляющем входе конвертера, отличающийся тем, что задают конечное множество U значений напряжения и затем циклически выполняют следующие действия:
- формируют прогноз Pf мощности Pout и разбивают период упреждения прогноза Pf на множество интервалов времени;
- на каждом интервале времени формируют множество прогнозных вариантов изменения напряжения разомкнутой цепи конденсаторной батареи так, чтобы на границах интервала времени величина этого напряжения принадлежала заданному конечному множеству U, причем для каждого варианта вычисляют потерю w, соответствующую выполнению прогноза Pf, по формуле
w=wab+k1⋅wcb+k2⋅wc,
где k1, k2 - весовые коэффициенты, wab - величина потерь энергии на внутреннем сопротивлении аккумуляторной батареи, wcb - величина потерь энергии на внутреннем сопротивлении конденсаторной батареи, wc - величина потерь энергии в конвертере;
- из множества сформированных прогнозных вариантов выбирают последовательность, которая образует непрерывную функцию uf(t) при минимальной сумме потерь w, затем подают на управляющий вход конвертера такую уставку Ref, что величина напряжения разомкнутой цепи конденсаторной батареи стремится к uf(t).
8. Способ по п. 7, отличающийся тем, что циклическое выполнение указанных действий осуществляют с периодом повторения, многократно меньшим, чем период упреждения прогноза Pf.
9. Способ по п. 7, отличающийся тем, что его применяют на электромобиле со средствами навигации, данные которых используют для составления маршрута, и средствами оценки дорожной обстановки, данные которых используют для прогнозирования графика движения электромобиля по маршруту, а формирование прогноза Pf осуществляют по формуле
Pf=(m⋅v⋅dv/dt+m⋅g⋅dh/dt+Pw)/η,
где m - масса электромобиля, v, h - прогнозируемые скорость и высота положения электромобиля, g - ускорение свободного падения, Pw - прогнозируемая мощность потерь, обусловленных трением качения и аэродинамическим сопротивлением электромобиля, η - коэффициент полезного действия электропривода ведущих колес электромобиля, причем период упреждения прогноза Pf задают так, чтобы он превышал величину
(Emax-Emin)/Pav,
где Emax, Emin - максимально и минимально возможные запасы энергии конденсаторной батареи, Pav - средняя мощность Pout при движении электромобиля по магистральной дороге с качественным покрытием.
| US 7791216 B1, 07.09.2010 | |||
| KR 20100074211 A, 30.06.2011 | |||
| CN 103647274 A, 19.03.2014 | |||
| JP 2009132176 A, 18.06.2009 | |||
| CN 204674395 U, 30.09.2015. |

