Изобретение относится к области электротехники, а именно, к управлению индукторными машинами, и может быть использовано преимущественно на транспортных машинах и тракторах с электрической трансмиссией, а также в промышленных приводах.
Традиционно используемый вариант конвертера индукторной машины содержит переключающие схемы фазных обмоток; каждая такая схема представляет собой мост (H-brige), построенный на двух транзисторах и двух диодах (R. Krishnan, "Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications", CRC Press, 2001.). Данный вариант конвертера позволяет регулировать токи фазных обмоток независимо один от другого.
Конвертер с независимым регулированием токов фазных обмоток может использоваться в системе, обеспечивающей уменьшение пульсаций крутящего момента индукторной машины (U.S. Pat. №9,236,820 В2 - Jan. 12, 2016). В данном изобретении ток каждой фазной обмотки регулируют в соответствии с уставкой reƒ(θ), которая является функцией от угла θ положения ротора индукторной машины и задается в табличном виде. График функции reƒ(θ) имеет близкую к трапеции форму, но отличается от последней наличием дополнительного локального минимума, что необходимо для сглаживания пульсаций крутящего момента.
Общий недостаток вышеупомянутых решений - дорогостоящая схема конвертера - связан с тем, что для коммутации q фазных обмоток используется 2q полумостов. Полумосты могут быть двух типов: симметричными (например, два последовательно соединенных MOSFET или IGBT транзистора, шунтированных обратно включенными диодами), либо асимметричными (например, последовательно соединенные IGBT транзистор и обратно включенный диод). Стоимость конвертера наиболее существенна, если он обладает высокой мощностью и коммутируемые токи составляют сотни Ампер. Для коммутации таких токов современной промышленностью выпускаются диодно-транзисторные модули симметричных полумостов, - в итоге, стоимость мощного конвертера определяется общим количеством полумостов (модулей).
В техническом решении, которое является наиболее близким к заявляемому изобретению (Z. Grbo, S. Vukosavic, Е. Levi, "A Novel Power Inverter for Switched Reluctance Motor Drives", Facta Universitatis, Ser.: Elec. Energ. vol. 18, no. 3, Dec. 2005, pp. 453-465.) количество полумостов в конвертере индукторной машины уменьшено до величины q+1: конвертер содержит один общий полумост и q фазных полумостов, где q - количество фазных обмоток индукторной машины; каждый полумост имеет вход управления, плюсовой вывод, минусовой вывод и выход, выполненный с возможностью переключения между плюсовым и минусовым выводами по сигналу на входе управления. Каждый полумост построен по симметричной схеме и содержит первый и второй электронные ключи, выполненные на основе MOSFET или IGBT транзисторов, шунтированных обратно включенными диодами, причем плюсовой вывод полумоста связан с его выходом через первый электронный ключ, а выход полумоста связан с его минусовым выводом через второй электронный ключ. Фазные обмотки соединены «звездой», причем выход общего полумоста связан с выходом каждого фазного полумоста через соответствующую фазную обмотку. Каждый полумост подключен плюсовым и минусовым выводами к источнику питания постоянного тока.
Данный конвертер может иметь различные состояния, которые обеспечивают для каждой фазы выполнение следующих процессов:
- намагничивание (к фазной обмотке приложено прямое напряжение источника питания, что приводит к увеличению фазного тока);
- свободное размагничивание (фазная обмотка замкнута накоротко, что приводит к замедленному уменьшению фазного тока);
- форсированное размагничивание (к фазной обмотке приложено обратное напряжение источника питания, что приводит к ускоренному уменьшению фазного тока).
Указанные процессы для различных фаз могут частично накладываться друг на друга (например, намагничивание одной фазы, и одновременное размагничивание другой).
В описании данного конвертера раскрыт способ управления, заключающийся в том, что постоянно измеряют токи фазных обмоток и угол положения ротора индукторной машины и чередуют различные состояния конвертера в зависимости от результатов измерений, в том числе:
- формируют уставки, абсолютная величина которых является периодически повторяющейся функцией от угла положения ротора с периодом повторения 360°/z, где z - количество зубцов ротора;
- подают на входы управления фазных полумостов последовательности импульсов и модулируют их так, чтобы обеспечить регулирование токов фазных обмоток в соответствии с уставками;
- переключают выход общего полумоста между его плюсовым и минусовым выводами в зависимости от угла положения ротора, причем угловой интервал между переключениями составляет 360°/(q⋅z).
Этот способ не пригоден для эффективного подавления пульсаций крутящего момента, так как не позволяет регулировать токи фазных обмоток независимо один от другого, что проявляется в следующем:
- в активной фазной обмотке невозможно обеспечить регулирование тока в соответствии с уставкой, график которой имеет близкую к трапеции форму, но отличается от последней наличием дополнительного локального минимума;
- в неактивной фазной обмотке возникает паразитный электрический ток, который обусловлен взаимной индуктивностью фазных обмоток и замыкается по контуру, образованному включенным транзистором общего полумоста, неактивной фазной обмоткой и диодом соответствующего фазного полумоста.
Задачей заявляемого изобретения является уменьшение пульсаций крутящего момента индукторной машины.
Технический результат, позволяющий решить поставленную задачу состоит в независимом регулировании токов фазных обмоток индукторной машины.
Способ управления индукторной машиной, ротор которой имеет z зубцов, а статор - q фазных обмоток, соединенных «звездой», причем:
- конвертер индукторной машины состоит из одного общего полумоста и q фазных полумостов;
- каждый полумост имеет вход управления, плюсовой вывод, минусовой вывод и выход, выполненный с возможностью переключения между плюсовым и минусовым выводами по сигналу на входе управления;
- выход общего полумоста связан с выходом каждого фазного полумоста через соответствующую фазную обмотку;
- каждый полумост подключен плюсовым и минусовым выводами к источнику питания постоянного тока;
заключается в том, что:
- постоянно измеряют угол θ положения ротора и токи i1, … iq фазных обмоток;
- формируют уставки reƒ1(θ), … reƒq(θ), абсолютная величина которых является периодически повторяющейся функцией от угла θ положения ротора с периодом повторения 360°/z;
- подают на входы управления фазных полумостов последовательности импульсов u1, … uq и модулируют их так, чтобы обеспечить регулирование токов i1, … iq фазных обмоток в соответствии с уставками reƒ1(θ), … reƒq(θ);
и согласно заявляемому изобретению:
- подают на вход управления общего полумоста последовательность импульсов u0, которая характеризуется коэффициентом заполнения
d0=τ/Т,
где τ - длительность импульсов, Т - период повторения импульсов;
- модулируют последовательность импульсов u0 так, чтобы коэффициент заполнения определялся одним из двух уравнений:
d0=d,
d0=1-d,
которые чередуются в зависимости от угла θ положения ротора с интервалом 360°/(q⋅z), где d - переменная с областью допустимых значений от 0 до 1/2;
Заявляемый способ, в зависимости от скорости ω вращения ротора, может осуществляться так, что графики уставок reƒ1(θ), … reƒq(θ) имеют следующую форму:
- близкую к прямоугольнику при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- близкую к трапеции, но отличающуюся от последней наличием дополнительного локального минимума, при низкой скорости ω вращения ротора.
Заявляемый способ, в зависимости от скорости ω вращения ротора, может осуществляться так, что переменная d принимает значения:
- 0 при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
-1/2 при низкой скорости ω вращения ротора.
Заявляемый способ, в зависимости от скорости ω вращения ротора, может осуществляться так, что переменная d принимает значения:
- 0 при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- около 1/4 при низкой скорости ω вращения ротора.
В заявляемом способе модуляцию последовательностей импульсов u1, … uq, подаваемых на входы управления фазных полумостов, могут выполнять путем переключения между следующими состояниями:
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к минусовому выводу;
- сигнал на входе управления фазного полумоста совпадает с последовательностью импульсов u0;
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к плюсовому выводу.
Для осуществления заявляемого способа может использоваться схема управления, которая содержит:
- датчик угла положения ротора;
- датчики тока фазных обмоток;
- регуляторы тока фазных обмоток, каждый из которых имеет: входы выбора режима модуляции, задающий вход, измерительный вход, связанный с соответствующим датчиком тока фазной обмотки, и выход регулятора, связанный с входом управления соответствующего фазного полумоста;
- микроконтроллер, имеющий вход микроконтроллера, связанный с датчиком угла положения ротора, и множество выходов, которые служат: для формирования последовательности импульсов u0 на входе управления общего полумоста, для управления входами выбора режима модуляции, и для формирования уставок reƒ1(θ), … reƒq(θ) на задающих входах.
Каждый регулятор тока фазной обмотки может содержать:
- компаратор с прямым входом, инверсным входом и выходом;
- мультиплексор с первым сигнальным входом, вторым сигнальным входом, входом управления и выходом;
причем:
- вход управления мультиплексора, связан с выходом компаратора,
- компаратор имеет гистерезисную характеристику;
- прямой вход компаратора является задающим входом,
- инверсный вход компаратора является измерительным входом;
- первый и второй сигнальные входы мультиплексора являются входами выбора режима модуляции;
- выход мультиплексора является выходом регулятора.
Для осуществления заявляемого способа требуются известные материалы и стандартное оборудование, то есть, он соответствует критерию «промышленная применимость».
Проведенные исследования по патентным и научно-техническим источникам информации свидетельствуют о том, что заявляемый способ неизвестен из изученного уровня техники и соответствует критерию «новизна».
Не подтверждена известность влияния отличительных признаков заявляемого способа на технический результат - независимое регулирование токов фазных обмоток индукторной машины. Таким образом, заявляемый способ не следует явным образом из уровня техники и соответствует критерию «изобретательский уровень».
Существенные признаки заявляемого способа влияют на достижение технического результата следующим образом:
1) Признак: «выход общего полумоста связан с выходом каждого фазного полумоста через соответствующую фазную обмотку» означает, что напряжение на выводах фазной обмотки определяется уравнением:

где j - номер фазной обмотки, Uj- напряжение на выходе фазного полумоста, U0 - напряжение на выходе общего полумоста. Изменение (спад или нарастание) тока фазной обмотки зависит от напряжения ULj.
2) Совокупность признаков: «каждый полумост подключен плюсовым и минусовым выводами к источнику питания постоянного тока; подают на входы управления фазных полумостов последовательности импульсов …; подают на вход управления общего полумоста последовательность импульсов …» означает, что при анализе тока фазной обмотки величины напряжений в уравнении (1) можно заменить их средними значениями


где U - напряжение источника питания постоянного тока, dj - коэффициент заполнения импульсов на входе управления фазного полумоста, d0 - коэффициент заполнения импульсов на входе управления общего полумоста. В учетом уравнений (2) и (3), уравнение (1) можно переписать в виде

где разность (dj-d0) может меняться в диапазоне от -d0 до (1-d0).
3) Признак: «модулируют последовательность импульсов u0 так, чтобы коэффициент d0 заполнения определялся одним из двух уравнений:


которые чередуются в зависимости от угла θ положения ротора с интервалом 360°/(q⋅z), где d - переменная с областью допустимых значений от 0 до 1/2» означает, что разность (dj-d0) в выражении (4) может принимать как положительные, так и отрицательные значения при любом положении ротора. Таким образом, на выводы любой фазной обмотки можно подавать напряжение любой полярности при любом положении ротора, то есть, обеспечить независимое управление токами фазных обмоток.
4) Признак: «в зависимости от скорости ω вращения ротора графики уставок reƒ1(θ), … reƒq(θ) имеют следующую форму:
- близкую к прямоугольнику при высокой скорости со вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- близкую к трапеции, но отличающуюся от последней наличием дополнительного локального минимума, при низкой скорости со вращения ротора» в совокупности с признаками, обеспечивающими независимое управление токами фазных обмоток, позволяет уменьшить пульсации крутящего момента индукторной машины в широком диапазоне скоростей. 5) Признак: «… переменная d принимает значение … 1/2 при низкой скорости ω вращения ротора» означает, что в соответствии с (4), (5), (6) напряжение на выводах любой фазной обмотки можно изменять в пределах от -0,5 U до 0,5 U, и произвольно задавать направление и величину тока фазной обмотки независимо от положения ротора. В частности, в четырехфазной индукторной машине направление токов фазных обмоток можно чередовать в следующем порядке:
- i1 - положительный;
- i2 - отрицательный;
- i3 - положительный;
- i4 - отрицательный;
i1 - отрицательный;
-i2 - положительный;
- i3 - отрицательный;
- i4 - положительный …
Такая последовательность позволяет равномерно (поочередно) нагружать полупроводниковые элементы симметричных полумостов. Данный вариант приемлем при достаточно низкой скорости со вращения ротора, так как скорость нарастания (спада) тока фазной обмотки лимитируется величиной 0,5 U.
Признак: «… переменная d принимает значение … 1/4 при низкой скорости ω вращения ротора» означает, что в соответствии с (4), (5), (6) напряжение на выводах фазных обмоток в зависимости от положения ротора можно изменять в следующих пределах:
- от -0,25 U до 0,75 U;
- от -0,75 U до 0,25 U.
По сравнению с предыдущим вариантом скорость нарастания (спада) тока фазной обмотки увеличена, и лимитируется величиной 0,75 U, но направление тока в фазных обмотках не является произвольным и зависит от положения ротора. В частности, для индукторной машины с тремя фазными обмотками направление токов в них можно чередовать в следующем порядке:
- i1 - положительный;
- i2 - отрицательный;
- i3 - положительный;
- i1 - отрицательный;
- i2 - положительный;
- i3 - отрицательный …
Выбор значения переменной d определяется многими факторами, и не исчерпывается приведенными примерами.
6) Признак «модуляцию последовательностей импульсов u1, … uq, подаваемых на входы управления фазных полумостов, выполняют путем переключения между следующими состояниями:
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к минусовому выводу;
- сигнал на входе управления фазного полумоста совпадает с последовательностью импульсов u0;
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к плюсовому выводу» позволяет синхронизировать последовательность импульсов на входе управления фазного полумоста с последовательностью импульсов u0 на входе общего полумоста в режиме свободного размагничивания (когда фазная обмотка замкнута накоротко). Такая синхронизация уменьшает пульсации тока источника питания.
Заявляемый способ осуществлен в вентильно-индукторном двигателе, работа которого поясняется чертежами.
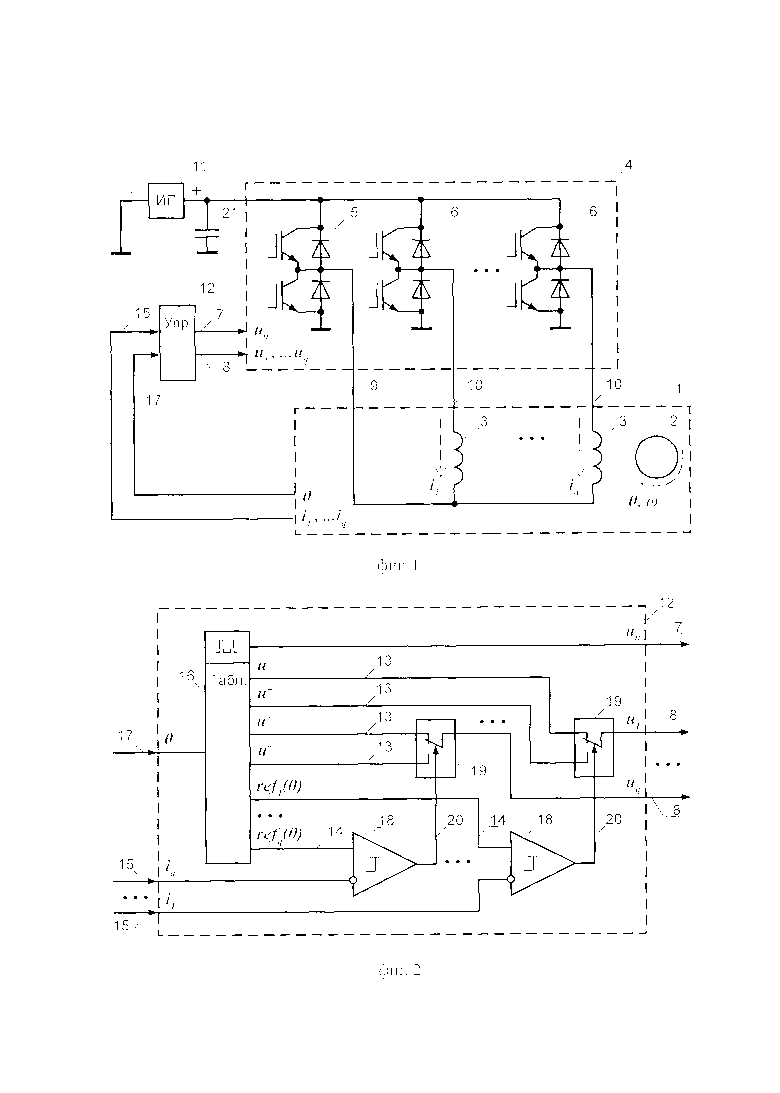
Фиг. 1 содержит схему вентильно-индукторного двигателя.
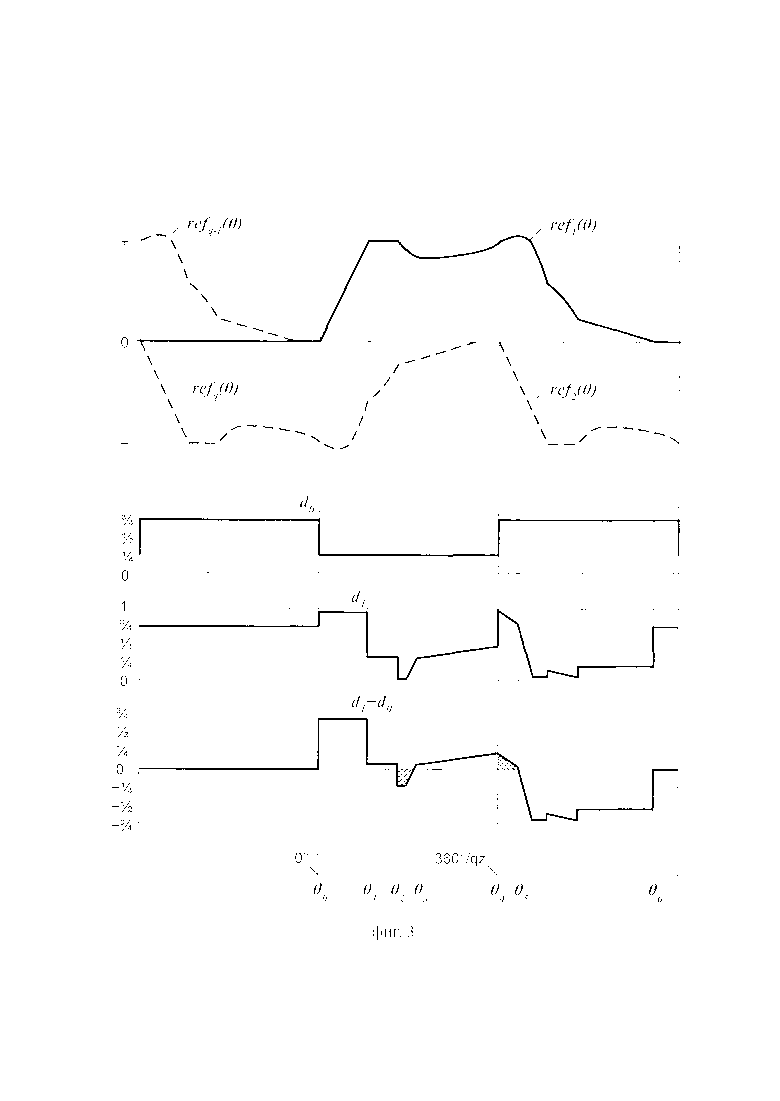
Фиг. 2 содержит схему управления, предназначенную для осуществления заявляемого способа.
Фиг. 3 и фиг. 4 содержат диаграммы.
На схеме (фиг. 1) представлены:
- индукторная машина 1, которая содержит ротор 2 и фазные обмотки 3;
- конвертер 4, который содержит общий полумост 5 и фазные полумосты 6;
- вход 7 управления общего полумоста;
- входы 8 управления фазных полумостов;
- выход 9 общего полумоста;
- выходы 10 фазных полумостов;
- источник 11 питания постоянного тока;
- схема 12 управления;
- конденсатор 21.
Каждый полумост 5, 6 построен по симметричной схеме и содержит первый и второй электронные ключи, выполненные на основе IGBT транзисторов, шунтированных обратно включенными диодами. Выход 9, 10 каждого полумоста связан с плюсовым выводом через первый электронный ключ, и с минусовым выводом - через второй электронный ключ. Затворы IGBT транзисторов через логические элементы и драйверы (на схеме не показаны) связаны с входами 7,8 управления полумостов. Фазные обмотки 3, соединены «звездой». Выход 9 общего полумоста связан с выходом 10 каждого фазного полумоста через соответствующую фазную обмотку 3. Каждый полумост подключен плюсовым и минусовым выводами к источнику 11 питания постоянного тока и конденсатору 21. Вход 7 управления общего полумоста и входы 8 управления фазных полумостов связаны со схемой 12 управления.
Схема 12 управления (фиг. 2) содержит:
- датчик угла θ положения ротора (на схеме не показан);
- датчики тока i1, … iq фазных обмоток (на схеме не показаны);
- регуляторы тока фазных обмоток, которые имеют: входы 13 выбора режима модуляции, задающие входы 14, измерительные входы 15, связанные с датчиками тока i1, … iq фазных обмоток и выходы, связанные с входами 8 управления фазных полумостов;
- микроконтроллер 16, имеющий вход 17, связанный с датчиком угла θ положения ротора, и множество выходов, которые подключены: ко входу 7 управления общего полумоста, ко входам 13 выбора режима модуляции и к задающим входам 14.
Каждый регулятор тока фазной обмотки содержит:
- компаратор 18 с прямым входом, инверсным входом и выходом;
- мультиплексор 19 с первым сигнальным входом, вторым сигнальным входом, входом 20 управления и выходом. Вход 20 управления мультиплексора, связан с выходом компаратора. Прямой вход компаратора является задающим входом 14. Инверсный вход компаратора является измерительным входом 15. Первый и второй сигнальные входы мультиплексора являются входами 13 выбора режима модуляции. Выход мультиплексора является выходом регулятора.
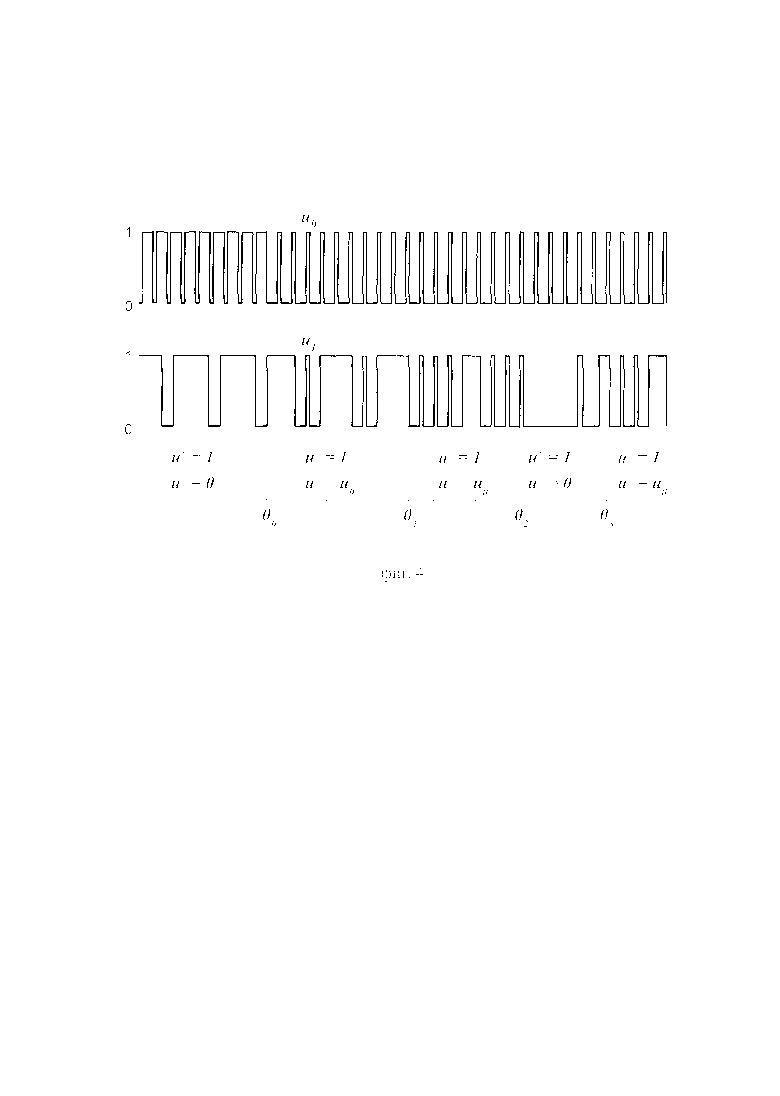
На диаграммах (фиг. 3, фиг. 4) в зависимости от угла (θ) положения ротора представлены:
- уставки reƒ1(θ), reƒ2(θ), reƒq-1(θ), reƒq(θ);
- коэффициент d0 заполнения;
- коэффициент d1 заполнения;
- разность (d1-d0) коэффициентов заполнения;
- последовательность импульсов u0;
- последовательность импульсов u1.
В исходном состоянии схема 12 управления и драйверы полумостов 5, 6 обесточены, IGBT транзисторы заперты, токи ij, … iq фазных обмоток равны нулю, ротор 2 неподвижен.
После подачи питания на драйверы полумостов 5, 6 и схему 12 управления, на вход 17 микроконтроллера 16 поступает сигнал от датчика угла в положения ротора.
Микроконтроллер 16 подает на вход 7 управления общего полумоста последовательность импульсов u0, представленную на диаграмме (фиг. 4). Данная последовательность характеризуется коэффициентом d0 заполнения. В рассматриваемом примере коэффициент d0 заполнения принимает одно из двух значений: 3/4 либо 1/4, которые чередуются в зависимости от угла θ положения ротора с интервалом 360°/(q⋅z).
В памяти микроконтроллера 16 содержится таблица, на вход которой подается значение угла θ положения ротора, а в ячейках записаны цифровые значения уставок reƒ1(0), … reƒq(θ). Указанные значения, через цифро-аналоговый преобразователь (на схеме не показан), поступают на задающие входы 14 (прямые входы компараторов 18). Одновременно, на измерительные входы 15 (инверсные входы компараторов 18) поступают сигналы от датчиков тока i1, … iq фазных обмоток. Выходы компараторов 18 через мультиплексоры 19 связаны с входами 8 управления фазных полумостов, на которые подаются последовательности импульсов u1, … uq такие, что за счет действия отрицательной обратной связи обеспечивается регулирование тока i1, … iq фазных обмоток в соответствии с уставками reƒ1(θ), … reƒq(θ). Механизм действия отрицательной обратной связи широко известен и не требует дополнительных пояснений. Появление тока фазных обмоток приводит к появлению крутящего момента и вращению ротора 2.
На диаграмме (фиг. 4) в качестве примера представлена последовательность импульсов u1 на входе управления первого фазного полумоста. Данная последовательность характеризуется коэффициентом d1 заполнения, который может изменяться в диапазоне от 0 до 1.
Последовательность импульсов u1 формируется путем переключения между логическими сигналами u- и u+ на входах 13 выбора режима модуляции. Сигналы u-, u+ задаются микроконтроллером 16 и могут принимать значения 0, 1, либо совпадать с последовательностью импульсов u0, как показано на фиг. 4. В тех случаях, когда указанные сигналы совпадают с последовательностью импульсов u0, уменьшается величина пульсирующего тока, протекающего через источник 11 питания и конденсатор 21, что позволяет уменьшить их размеры и стоимость.
Согласно уравнению (4) напряжение на выводах первой фазной обмотки определяется разностью (d1-d0) коэффициентов заполнения. На фиг. 3 представлены диаграммы разности (d1-d0) и уставки reƒ1(θ), в соответствии с которой осуществляется регулирование тока первой фазной обмотки. График уставки reƒ1(θ) имеет сложную форму, обеспечивающую сглаживание пульсаций крутящего момента:
1) При (θ6<θ<θ0) первая фазная обмотка неактивна - ее ток поддерживается равным нулю; разность (d1-d0) может кратковременно отклоняться от нулевого значения, в пределах ±1/4, препятствуя возникновению паразитного электрического тока, обусловленного взаимной индуктивностью фазных обмоток.
2) При (θ=θ0) происходит ступенчатое уменьшение коэффициента d0 заполнения, связанное с тем, что необходимо активизировать первую фазную обмотку.
3) При (θ0<θ<θ1) ток первой фазной обмотки линейно нарастает; разность (d1-d0) близка к 3/4.
4) При (θ1<θ<θ2) ток первой фазной обмотки остается примерно постоянным; разность (d1-d0) близка к 0.
5) При (θ2<θ<θ3) ток первой фазной обмотки уменьшается; разность (d1-d0) находится в диапазоне от -1/4 до 0 (заштрихованная область на фиг. 3). Уменьшение тока фазной обмотки и формирование локального минимума оказывается возможным благодаря тому, что коэффициент d0 заполнения больше нуля (равен 1/4).
6) При (θ3<θ<θ4) ток первой фазной обмотки вновь нарастает; разность (d1-d0) находится в диапазоне от 0 до 1/4.
7) При (θ=θ4) происходит ступенчатое увеличение коэффициента d0 заполнения, связанное с тем, что необходимо активизировать вторую фазную обмотку.
8) При (θ4<θ<θ5) ток первой фазной обмотки продолжает нарастать, а разность (d1-d0) остается в диапазоне от 1/4 до 0 (заштрихованная область на фиг. 3). Нарастание тока первой фазной обмотки и формирование локального максимума оказывается возможным благодаря тому, что коэффициент d0 заполнения меньше единицы (равен 3/4 ).
8) При (θ5<θ<θ6) ток первой фазной обмотки уменьшается по заданному графику; разность (d1-d0) находится в диапазоне от -1/2 до -3/4.
Регулирование тока в других фазных обмотках осуществляется аналогично.
Заявляемый способ управления индукторной машиной позволяет уменьшить пульсации крутящего момента, и при этом не требует использования дорогостоящего конвертера.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| Система аккумулирования энергии и способ управления ею | 2019 |
|
RU2721227C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОЙ МАШИНОЙ | 2003 |
|
RU2242837C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| Вентильный магнитоэлектрический генератор с коррекцией входного коэффициента мощности его выпрямителя | 2022 |
|
RU2792170C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2003 |
|
RU2265950C2 |
| ИНДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2018 |
|
RU2689380C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В ЭЛЕКТРИЧЕСКИЙ ИНФОРМАЦИОННЫЙ СИГНАЛ | 2007 |
|
RU2327222C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
Изобретение относится к области электротехники и может быть использовано на транспортных машинах и тракторах с электрической трансмиссией и в промышленных приводах. Техническим результатом является уменьшение пульсаций крутящего момента без использования дорогостоящего конвертера. Ротор (2) индукторной машины (1) имеет z зубцов, а статор - q фазных обмоток (3), соединенных «звездой», причем конвертер (4) индукторной машины состоит из одного общего полумоста (5) с входом управления (7) и q фазных полумостов (6) с входами управления (8). Выход (9) общего полумоста связан с выходом (10) каждого фазного полумоста через соответствующую фазную обмотку (3). Полумосты запитаны от источника (11) постоянного тока. Способ управления индукторной машиной (1) осуществляется схемой (12) управления и заключается в том, что: постоянно измеряют угол θ положения ротора и токи i1, …iq фазных обмоток; формируют уставки reƒ1(θ), … reƒq(θ), абсолютная величина которых является периодически повторяющейся функцией от угла θ положения ротора с периодом повторения 360°/z; подают на входы (8) управления фазных полумостов последовательности импульсов u1, …uq и модулируют их так, чтобы обеспечить регулирование токов i1, …iq фазных обмоток в соответствии с уставками reƒ1(θ), … reƒq(θ); подают на вход (7) управления общего полумоста последовательность импульсов u0, которая характеризуется коэффициентом d0 заполнения; модулируют последовательность импульсов u0 так, чтобы коэффициент d0 заполнения определялся одним из двух уравнений: d0=d, d0=1-d, которые чередуются в зависимости от угла θ положения ротора с интервалом 360°/(q⋅z), где d - переменная с областью допустимых значений от 0 до 1/2. 6 з.п. ф-лы, 4 ил.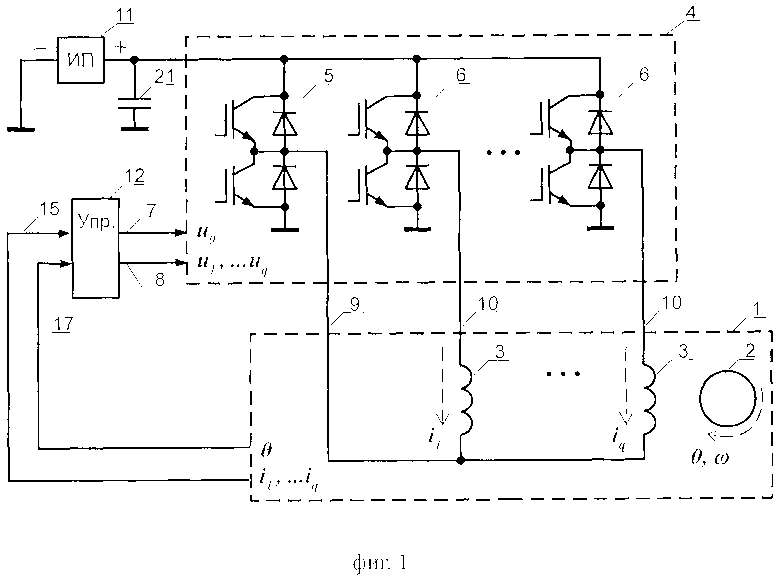
1. Способ управления индукторной машиной, ротор которой имеет z зубцов, а статор - q фазных обмоток, соединенных «звездой», причем:
- конвертер индукторной машины состоит из одного общего полумоста и q фазных полумостов;
- каждый полумост имеет вход управления, плюсовой вывод, минусовой вывод и выход, выполненный с возможностью переключения между плюсовым и минусовым выводами по сигналу на входе управления;
- выход общего полумоста связан с выходом каждого фазного полумоста через соответствующую фазную обмотку;
- каждый полумост подключен плюсовым и минусовым выводами к источнику питания постоянного тока,
заключающийся в том, что:
- постоянно измеряют угол θ положения ротора и токи i1, …iq фазных обмоток;
- формируют уставки reƒ1(θ), … reƒq(θ), абсолютная величина которых является периодически повторяющейся функцией от угла θ положения ротора с периодом повторения 360°/z;
- подают на входы управления фазных полумостов последовательности импульсов u1, …uq и модулируют их так, чтобы обеспечить регулирование токов i1, …iq фазных обмоток в соответствии с уставками reƒ1(θ), … reƒq(θ),
отличающийся тем, что:
- подают на вход управления общего полумоста последовательность импульсов u0, которая характеризуется коэффициентом заполнения
d0=τ/T,
где τ - длительность импульсов, Т - период повторения импульсов;
- модулируют последовательность импульсов u0 так, чтобы коэффициент заполнения определялся одним из двух уравнений:
d0=d, d0=1-d,
которые чередуются в зависимости от угла θ положения ротора с интервалом 360°/(q⋅z), где d - переменная с областью допустимых значений от 0 до 1/2.
2. Способ по п. 1, отличающийся тем, что в зависимости от скорости ω вращения ротора графики уставок reƒ1(θ), … reƒq(θ) имеют следующую форму:
- близкую к прямоугольнику при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- близкую к трапеции, но отличающуюся от последней наличием дополнительного локального минимума, при низкой скорости ω вращения ротора.
3. Способ по п. 2, отличающийся тем, что в зависимости от скорости ω вращения ротора переменная d принимает значения:
- 0 при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- 1/2 при низкой скорости ω вращения ротора.
4. Способ по п. 2, отличающийся тем, что в зависимости от скорости ω вращения ротора переменная d принимает значения:
- 0 при высокой скорости ω вращения ротора, достаточной для обеспечения его равномерного вращения за счет инерции;
- около 1/4 при низкой скорости ω вращения ротора.
5. Способ по п. 1, отличающийся тем, что модуляцию последовательностей импульсов u1, …uq, подаваемых на входы управления фазных полумостов, выполняют путем переключения между следующими состояниями:
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к минусовому выводу;
- сигнал на входе управления фазного полумоста совпадает с последовательностью импульсов u0;
- сигнал на входе управления фазного полумоста соответствует подключению его выхода к плюсовому выводу.
6. Способ по п. 5, отличающийся тем, что для его осуществления используют схему управления, которая содержит:
- датчик угла положения ротора;
- датчики тока фазных обмоток;
- регуляторы тока фазных обмоток, каждый из которых имеет: входы выбора режима модуляции, задающий вход, измерительный вход, связанный с соответствующим датчиком тока фазной обмотки, и выход регулятора, связанный с входом управления соответствующего фазного полумоста;
- микроконтроллер, имеющий вход микроконтроллера, связанный с датчиком угла положения ротора, и множество выходов, которые служат: для формирования последовательности импульсов u0 на входе управления общего полумоста, для управления входами выбора режима модуляции и для формирования уставок reƒ1(θ), … reƒq(θ) на задающих входах.
7. Способ по п. 6, отличающийся тем, что каждый регулятор тока фазной обмотки содержит:
- компаратор с прямым входом, инверсным входом и выходом;
- мультиплексор с первым сигнальным входом, вторым сигнальным входом, входом управления и выходом;
причем:
- вход управления мультиплексора связан с выходом компаратора;
- компаратор имеет гистерезисную характеристику;
- прямой вход компаратора является задающим входом;
- инверсный вход компаратора является измерительным входом;
- первый и второй сигнальные входы мультиплексора являются входами выбора режима модуляции;
- выход мультиплексора является выходом регулятора.
| АППАРАТ НЕПРЕРЫВНОГО ДЕЙСТВИЯ ДЛЯ ОТЖИМАМАСЛА | 0 |
|
SU259628A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА СО ВСТРОЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2017 |
|
RU2656866C1 |
| РЕЖУЩИЙ ИНСТРУМЕНТ, КОРПУС И РЕЖУЩАЯ ПЛАСТИНА ДЛЯ НЕГО | 2008 |
|
RU2455123C2 |
| DE 60031739 T2, 20.09.2007 | |||
| JP 5333419 B2, 06.11.2013 | |||
| US 6087799 A, 11.07.2000 | |||
| US 7030587 B2, 18.04.2006 | |||
| EP 1931025 A2, 11.06.2008 | |||
| CN 106411193 A, 15.02.2017. | |||

