Предлагаемая система относится к автоматизированным системам для управления строительным комплексом, включающим геодезический диспетчерский пункт, домокомбинат для производства строительных модулей, блоков и материалов, строительную площадку для возведения многоэтажных домов и сооружений и систему приема и передачи информации и может быть использовано для принятия оперативных и обоснованных решений на всех уровнях управления и контроля за погрузочно-разгрузочными и транспортно-складскими процессами с использованием компьютерной техники и радиочастотных меток.
Известны автоматизированные системы для управления и контроля различными производственными процессами (авт. свид. СССР №830304, 911464, 930254, 1233105, 1276594, 1780080; патенты РФ №2094853, 2.113012, 2158936, 2172524, 2343100, 2435228; патент США №5574648; патент Франции №2438877; патент ЕР №1843161 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является «Компьютерная система управления портовым контейнерным терминалом» (патент РФ №2435228, G08G 1/123, 2010), которая и выбрана в качестве прототипа.
Указанная система содержит диспетчерский геодезический пункт, домокомбинат для производства строительных модулей, блоков и материалов, строительную площадку, погрузчики трейлера, устройства для управления робототехническими комплексами и систему приема и передачи информации.
Каждый строительный блок (модуль) снабжен радиочастотной меткой. При получении информации диспетчерского геодезического пункта о номерах и местоположении строительных блоков(модулей), которые необходимо обнаружить и погрузить (разгрузить) на соответствующее транспортное средство погрузчик (трейлер) прибывает в заданный район и включает считыватель.
Однако при нахождении в зоне радиозондирования нескольких блоков (модулей) ответные сигналы от них придут к считывателю одновременно и кодовые последовательности наложатся друг на друга, делая невозможным независимое считывание индивидуального кода каждого блока (модуля).
Технической задачей изобретения является повышение достоверности считывания индивидуальных кодов одновременно с нескольких блоков (модулей), находящихся в зоне радиозондирования, путем последовательного во времени их радиоопроса.
Поставленная задача решается тем, что компьютерная система управления строительным комплексом, содержащая диспетчерский геодезический пункт, на котором установлены приемник GPS-сигналов с антенной, предназначенный для приема навигационного сигнала, используемого для вычисления дифференциальных поправок, передающую радиостанцию, предназначенную для передачи дифференциальных поправок на погрузчики и трейлеры, и дуплексную радиостанцию, на каждом погрузчике установлена дуплексная радиостанция, первый приемник с антенной, предназначенный для получения дифференциальных поправок с диспетчерского пунктами второй приемник с антенной, предназначенный для приема навигационного GPS-сигнала, используемого для вычисления дифференциальных поправок, при этом между диспетчерским геодезическим пунктом и каждым погрузчиком и трейлером установлены пейджинговая и двухсторонняя радиосвязи непосредственно и/или через систему приема и передачи информации, дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, содержит последовательно включенные компьютер, первый задающий генератор, первый фазовый манипулятор, второй вход которого через источник дискретного сообщения соединен с компьютером, первый амплитудный модулятор, второй вход которого через источник аналогового сообщения соединен с компьютером, первый смеситель, второй вход которого соединен с выходом первого гетеродина, первый усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина и первый усилитель суммарной частоты, первый амплитудный детектор, второй ключ, второй вход которого через первый усилитель второй промежуточной частоты соединены с выходом второго смесителя, первый усилитель-ограничитель, первый синхронный детектор, второй вход которого соединены с выходом второго ключа, компьютер и первый блок регистрации, последовательно подключенные к выходу первого усилителя-ограничителя первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр и первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, передающая радиостанция содержит последовательно включенные второй задающий генератор, второй фазовый манипулятор, второй вход которого соединен с прибором дифференциальных поправок, подключенным к выходу приемника GPS-сигналов с антенной, третий усилитель мощности и передающую антенну, дуплексная радиостанция, размещенная на каждом погрузчике и трейлере, содержит последовательно включенные микропроцессор, к которому подключены датчик номера погрузчика или трейлера и датчик погрузки-разгрузки погрузчика или трейлера, третий задающий генератор, третий фазовый манипулятор, второй амплитудный модулятор, второй вход которого соединен с микропроцессором, третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, четвертый усилитель мощности, второй дуплексер, вход-выход которого связан со второй приемопередающей антенной, пятый усилитель мощности, четвертый смеситель, второй вход которого соединен с выходом четвертого гетеродина и второй усилитель суммарной частоты, второй амплитудный детектор, третий ключ, второй вход которого через второй усилитель первой промежуточной частоты соединены с выходом четвертого смесителя, второй усилитель-ограничитель, второй синхронный детектор, второй вход которого соединены с выходом третьего ключа, и микропроцессор, последовательно подключенные к выходу второго усилителя-ограничителя второй перемножитель, второй вход которого соединен с выходом четвертого гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к микропроцессору, первый приемник, размещенный на каждом погрузчике и трейлере, содержит последовательно включенные вторую приемную антенну, усилитель высокой частоты, первую линию задержки, третий фазовый детектор, второй вход которого соединен с выходом усилителя высокой частоты, и блок определения местоположения погрузчика или трейлера, второй вход и выход которого подключены к микропроцессору дуплексной радиостанции, второй приемник с третьей приемной антенной, размещенный на каждом погрузчике и трейлере, подключен к микропроцессору дуплексной радиостанции, последовательно включенные шестой усилитель мощности, третий дуплексер, вход-выход которого связан с третьей приемопередающей антенной, седьмой усилитель мощности, четвертый фазовый детектор, второй вход которого соединен с выходом третьего задающего генератора, коррелятор, второй вход которого соединен с микропроцессором, пороговый блок, первый ключ, второй вход которого соединен с выходом четвертого фазового детектора, вторая линия задержки, сумматор, второй и третий входы которого соединены со вторым выходом датчика номера погрузчика или трейлера и микропроцессором соответственно, а выход подключен ко второму входу третьего фазового манипулятора, к выходу порогового блока подключены световой и звуковой маячки, к выходу первого ключа подключен второй блок регистрации, каждый строительный модуль и блок снабжен радиочастотной меткой, выполненной в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем поверхностных акустических волн и набором отражателей, причем встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, нанесенных на поверхность пьезокристалла, электроды каждой из гребенок соединены друг с другом шинами, которые в свою очередь соединены с микрополосковой приемопередающей антенной, изготовленной также на поверхности пьезокристалла, отличается от ближайшего аналога тем, что считыватель снабжен синтезатором несущих частот и логическим элементом и, причем к микропроцессору последовательно подключены синтезатор несущих частот и логический элемент и, второй вход которого через третий задающий генератор соединены с микропроцессором, а выход подключен к входу шестого усилителя мощности, управляющий вход третьего дуплексера подключен к микропроцессору, строительные модули снабжены радиочастотными метками и блоками доступности к встречно-штыревым преобразователям, где больше или равно количеству строительных модулей, находящихся в зоне радиооблучения, каждый блок доступности к встречно-штыревому преобразователю состоит из последовательно подключенных к приемопередающей антенне узкополосного фильтра, амплитудного детектора и двух ключей, включенных между приемопередающей антенной и шинами встречно-штыревого преобразователя соответственно.
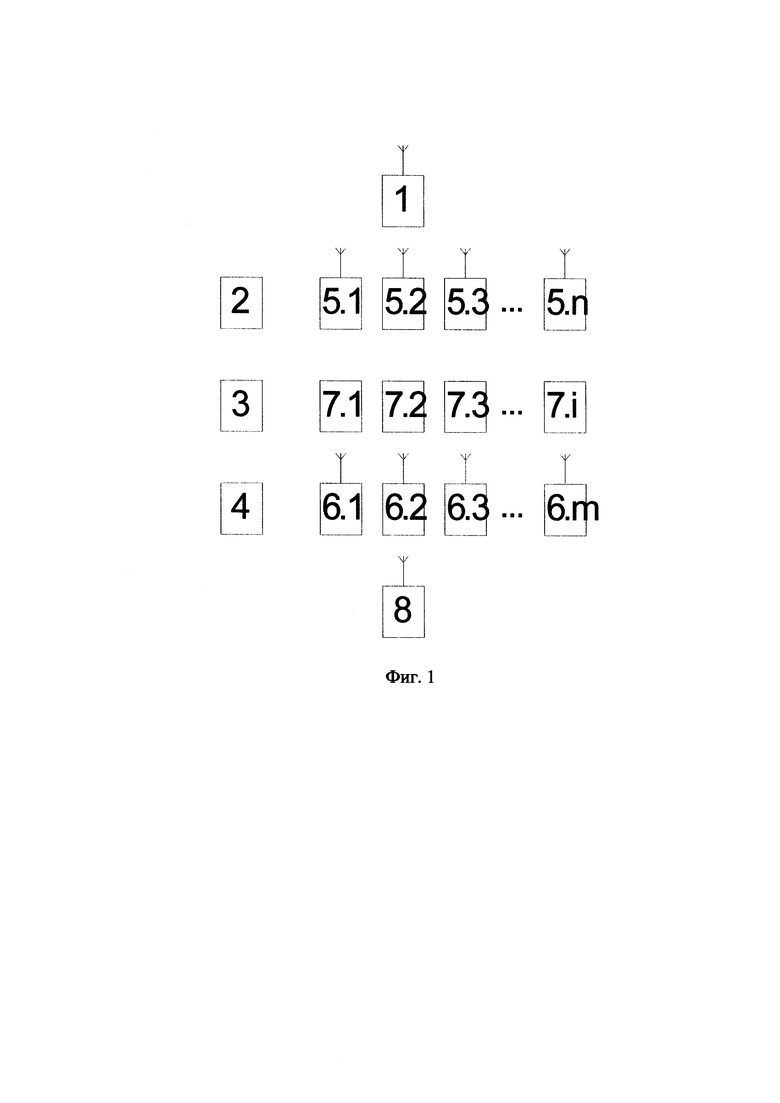
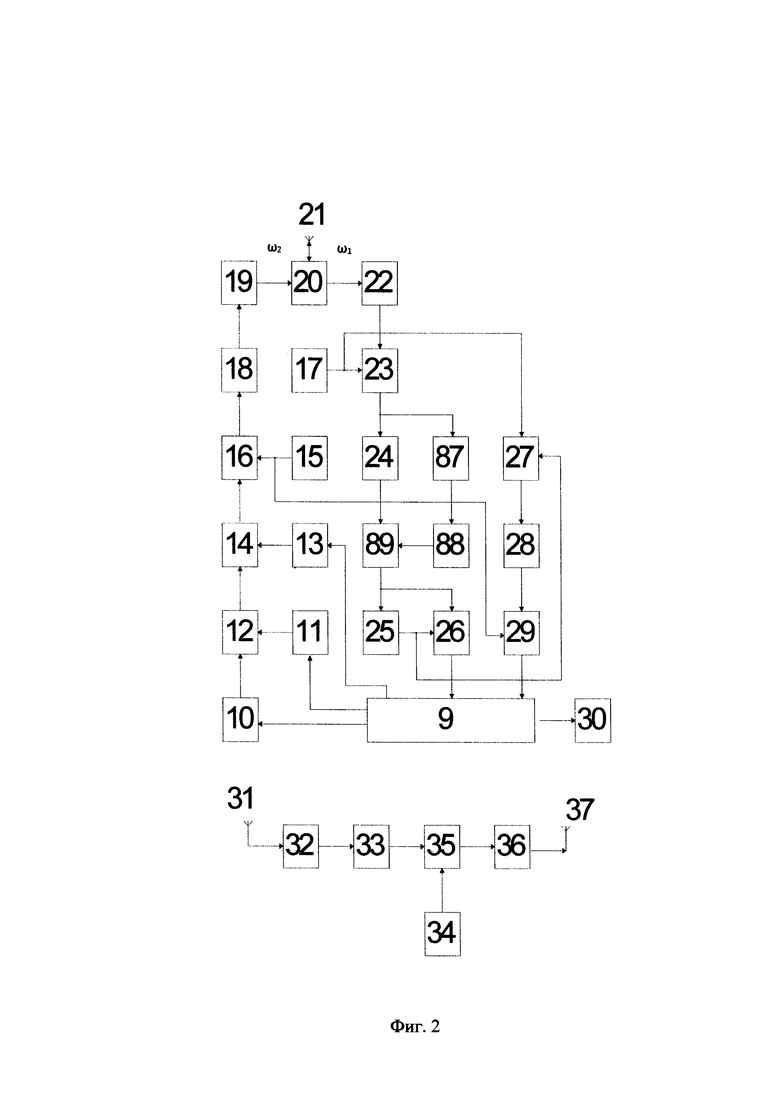
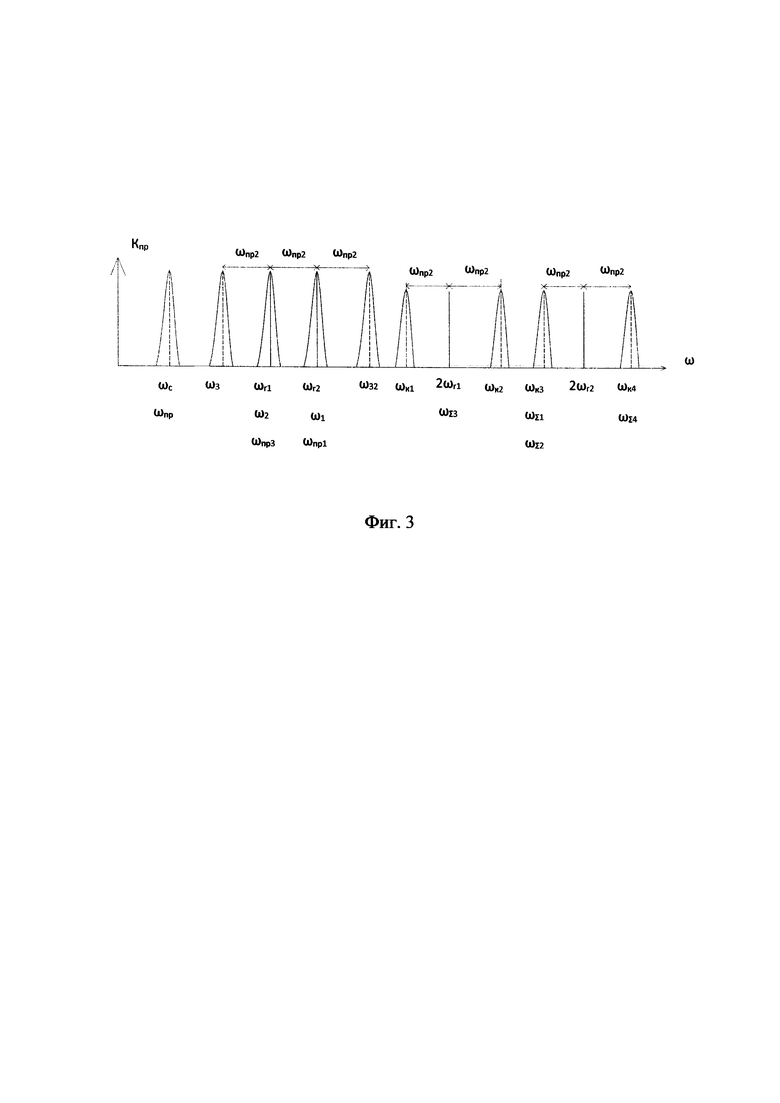
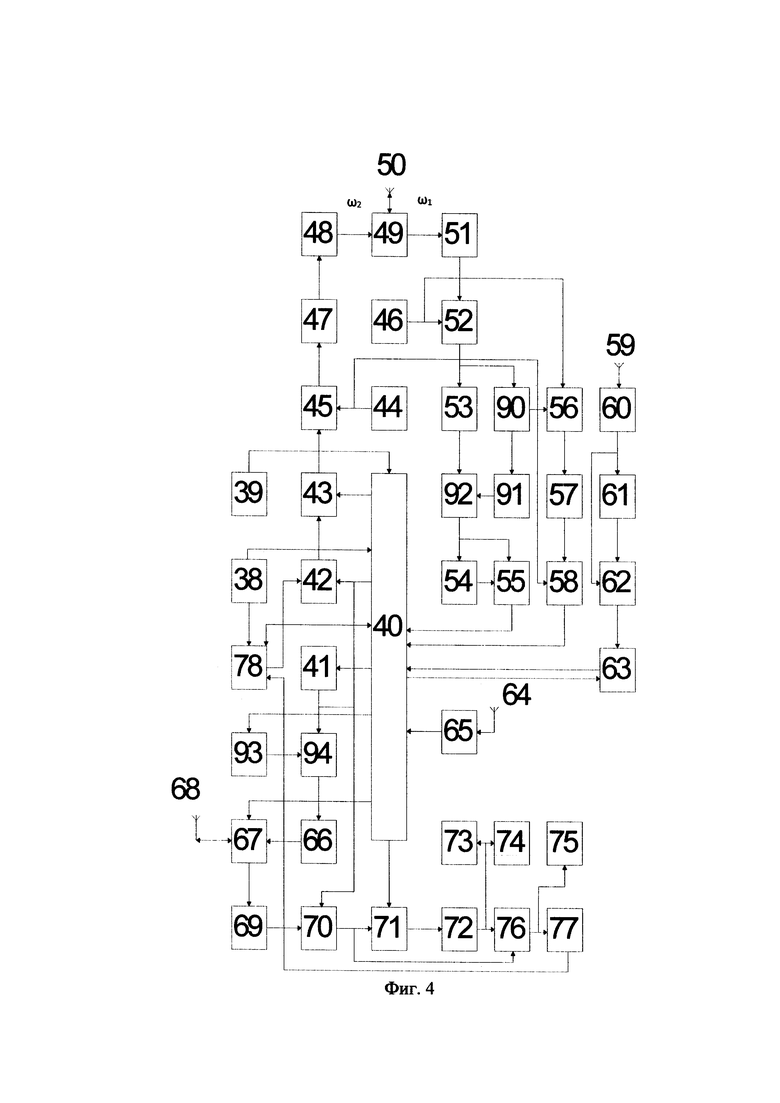
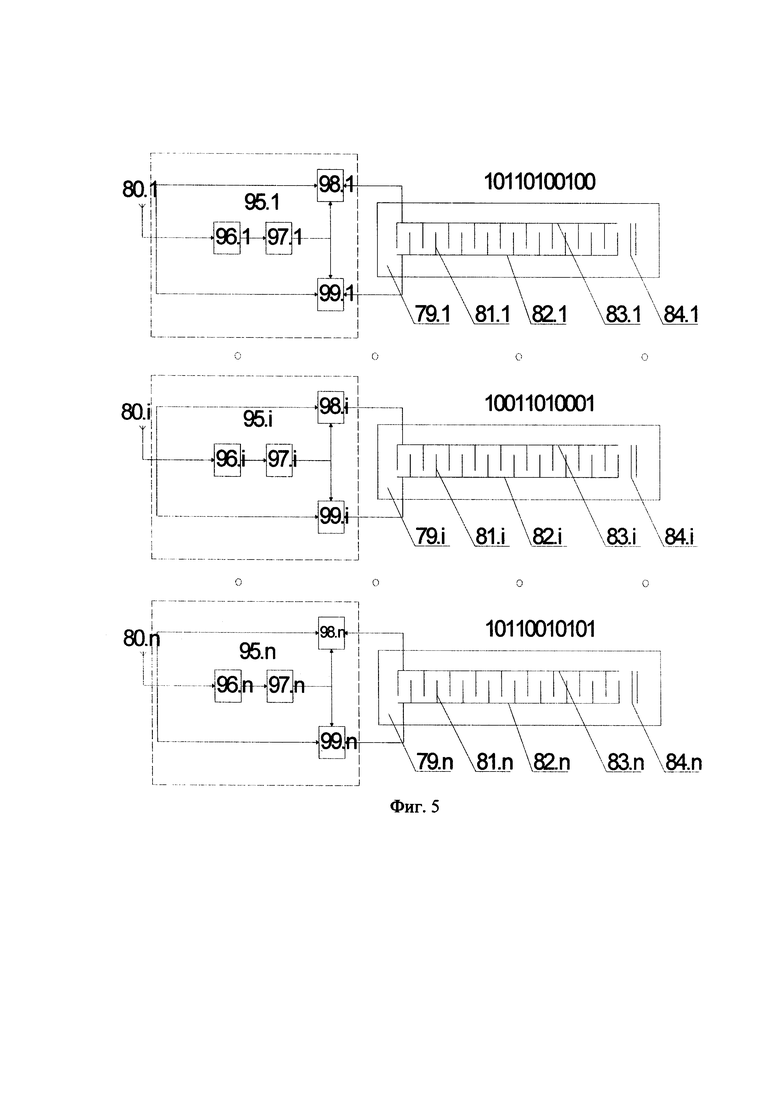
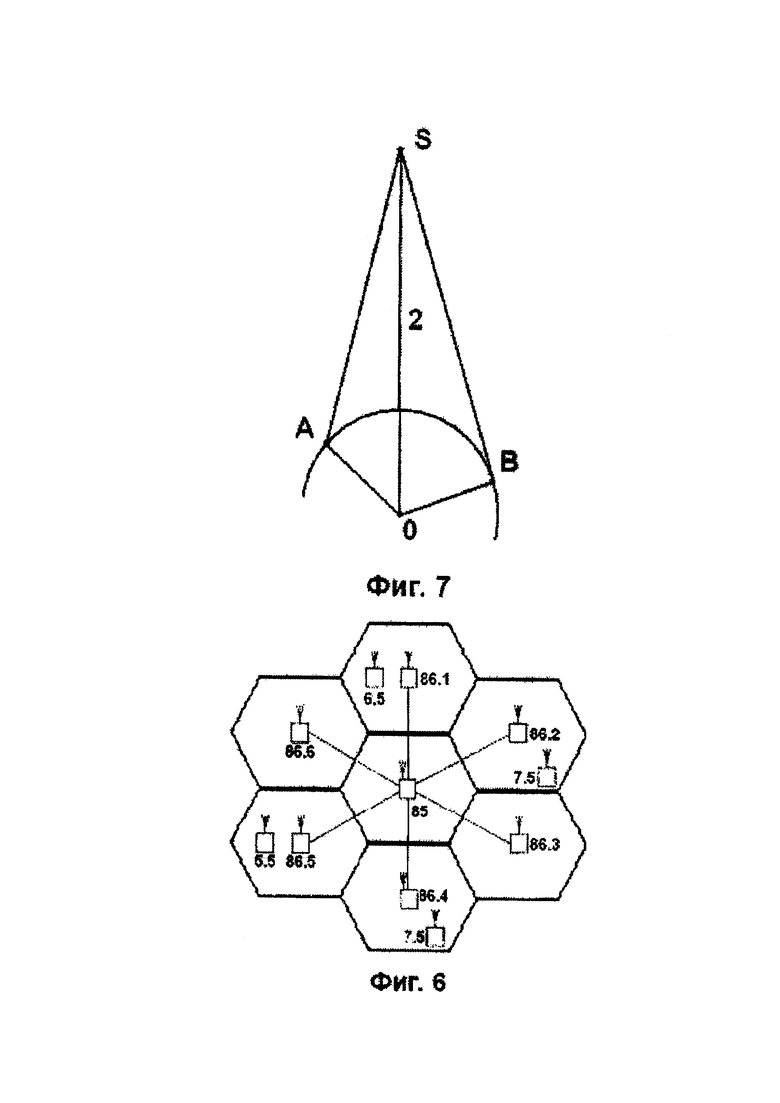
Структурная схема предлагаемой системы представлена на фиг. 1. Структурные схемы дуплексной и передающей радиостанций, размещенных на диспетчерском геодезическом пункте, изображены на фиг. 2. Частотная диаграмма, иллюстрирующая преобразование сигналов, показана на фиг. 3. Структурные схемы дуплексной радиостанции, двух приемников и считывателя, размещенных на каждом погрузчике и трейлере, представлены на фиг. 4. Функциональная схема радиочастотных меток изображена на фиг. 5. Структурная схема фрагмента радиотелефонной системы общего пользования с сотовой структурой представлена на фиг. 6. Геометрическая схема расположения геостационарного ИСЗ-ретранслятора S и трех наземных пунктов А, В и С показана на фиг. 7.
Компьютерная система управления строительным комплексом содержит диспетчерский геодезический пункт 1, на котором размещены дуплексная и передающая радиостанции, домокомбинат 2 для производства строительных модулей, блоков и материалов, склады 3 строительных модулей, блоков и материалов, строительную площадку 4, на которой возводятся дома и сооружения, погрузчики 5.i (i=1, 2, …, n), трейлеры 6.j (j=1, 2, …, m), устройства 7.1  для управления робототехнологическими комплексами и систему 8 приема и передачи информации (ППИ). При этом на каждом погрузчике и трейлере размещены дуплексная радиостанция, два приемника и считыватель. Между диспетчерским геодезическим пунктом 1 и погрузчиками (трейлерами) установлены пейджинговая и двусторонняя радиосвязь непосредственно и/или через систему 8 приема и передачи информации.
для управления робототехнологическими комплексами и систему 8 приема и передачи информации (ППИ). При этом на каждом погрузчике и трейлере размещены дуплексная радиостанция, два приемника и считыватель. Между диспетчерским геодезическим пунктом 1 и погрузчиками (трейлерами) установлены пейджинговая и двусторонняя радиосвязь непосредственно и/или через систему 8 приема и передачи информации.
Дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит последовательно включенные компьютер 9, первый задающий генератор 10, первый фазовый манипулятор 12, второй вход которого через источник 11 дискретных сообщений соединен с компьютером 9, первый амплитудный модулятор 14, второй вход которого через источник 13 непрерывных сообщений соединен с компьютером 9, первый смеситель 16, второй вход которого соединен с выходом первого гетеродина 15, первый усилитель 18 первой промежуточной частоты, первый усилитель 19 мощности, первый дуплексер 20, вход-выход которого связан с первой приемопередающей антенной 21, второй усилитель 22 мощности, второй смеситель 23, второй вход которого соединен с выходом второго гетеродина 17, первый усилитель 87 суммарной частоты, первый амплитудный детектор 88 и второй ключ 89, второй вход которого через первый усилитель 24 второй промежуточной частоты соединен с выходом второго смесителя 23, первый усилитель-ограничитель 25, первый синхронный детектор 26, второй вход которого соединен с выходом второго ключа 80, компьютер 9 и первый блок 30 регистрации. К выходу первого усилителя-ограничителя 25 последовательно подключены первый перемножитель 27, второй вход которого соединен с выходом второго гетеродина 17, первый полосовой фильтр 28 и первый фазовый детектор 29, второй вход которого соединен с выходом первого гетеродина 15, а выход подключен к компьютеру 9.
Передающая радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит последовательно включенные второй задающий генератор 34, второй фазовый манипулятор 35, второй вход которого соединен с прибором 33 дифференциальных поправок, подключенным к выходу приемника 32 GPS-сигналов с антенной 31, третий усилитель 36 мощности и передающую антенну 37.
Дуплексная радиостанция, размещаемая на каждом погрузчике (трейлере), содержит последовательно включенные датчик 38 номера погрузчика (трейлера), микропроцессор 40, к которому подключен датчик 39 погрузки-разгрузки, третий задающий генератор 41, третий фазовый манипулятор 42, второй амплитудный модулятор 43, ко второму входу которого подключен микропроцессор 40, третий смеситель 45, второй вход которого соединен с выходом третьего гетеродина 44, второй усилитель 47 второй промежуточной частоты, четвертый усилитель 48 мощности, второй дуплексер 49, вход-выход которого связан со второй приемопередающей антенной 50, пятый усилитель 51 мощности, четвертый смеситель 52, второй вход которого соединен с выходом четвертого гетеродина 46, второй усилитель 90 суммарной частоты, второй амплитудный детектор 91 и третий ключ 92, второй вход которого через второй усилитель 53 первой промежуточной частоты соединен с выходом четвертого смесителя 52, второй усилитель-ограничитель 54, второй синхронный детектор 55, второй вход которого соединен с выходом третьего ключа 92, и микропроцессор 40. К выходу второго усилителя-ограничителя 54 последовательно подключены второй перемножитель 56, второй вход которого соединен с выходом четвертого гетеродина 46, второй полосовой фильтр 57 и второй фазовый детектор 58, второй вход которого соединен с выходом гетеродина 44, а выход подключен к микропроцессору 40.
Первый приемник, размещенный на погрузчике (трейлере), содержит последовательно включенные вторую приемную антенну 59, усилитель 60 высокой частоты, первую линию задержки 61, третий фазовый детектор 62, второй вход которого соединен с выходом усилителя 60 высокой частоты, и блок 63 определение местоположения погрузчика (трейлера), второй вход и выход которого соединен с микропроцессором 40.
Второй приемник 65 с третьей приемной антенной 64 обеспечивает прием навигационных GPS-сигналов и подключен к микропроцессору 40.
Считыватель, размещенный на погрузчике (трейлере), содержит последовательно подключенные к микропроцессору 40 синтезатор 93 несущих частот, логический элемент 94, второй вход которого через третий задающий генератор 41 соединены с микропроцессором 40, шестой усилитель 66 мощности, третий дуплексер 67, вход-выход которого связан с третьей приемопередающей антенной 68, седьмой усилитель 69 мощности, четвертый фазовый детектор 70, второй вход которого соединен с выходом третьего задающего генератора 41, коррелятор 71, второй вход которого соединен с микропроцессором 40, пороговый блок 72, ключ 76, второй вход которого соединен с выходом фазового детектора 70, вторая линия задержки 77 и сумматор 78, второй и третий входы которого соединены со вторым выходом датчика 38 номера погрузчика (трейлера) и микропроцессором 40 соответственно, а выход подключен ко второму входу третьего фазового манипулятора 42. К выходу порогового блока 72 подключены световой и звуковой маячки. К выходу ключа 76 подключен второй блок 75 регистрации.
Каждый строительный блок (модуль) снабжен радиочастотной меткой, выполненной в виде пьезокристалла 79.i с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем (ВШП) поверхностных акустических волн (ПАВ) и набором отражателей 84.i Причем встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов 81.i нанесенных на поверхность пьезокристалла 79.i электроды 81.i каждой из гребенок соединены друг с другом шинами 82.i и 83.i которые в свою очередь соединены с микрополосковой приемопередающей антенной 80.i изготовленной также на поверхности пьезокристалла 79.i (I=1, 2…, n, где n - количество модулей, находящихся в зоне радиооблучения).
Каждый блок 95.i доступности к ВШП состоит из последовательно подключенных к антенне 80.i узкополосного фильтра 96.i, амплитудного детектора 97.i и двух ключей 98.i и 99.i, включенных между приемопередающей антенной 80.i и шинами 82.i, 83.i ВШП соответственно.
В качестве системы 8 приема и передачи информации может использоваться радиотелефонная система общего пользования с сотовой структурой, фрагмент которой изображен на фиг. 6.
Территория строительного комплекса и прилегающая к нему территория разделяются на ячейки (соты), в каждой из которых устанавливается базовая радиостанция 86.к (к=1, 2, …, К), которая связана радиоканалом с погрузчиком 5.i (i=1, 2, …, n) или трейлером 6.j (j=1, 2, …, m). При этом передатчики указанных радиостанций имеют относительно небольшую мощность. Чтобы оптимально разделить определенную территорию на микрозоны без перекрытий и пропусков участков, могут быть использованы только три геометрические фигуры: треугольник, квадрат и шестиугольник. Наиболее подходящей фигурой является шестиугольник, так как если антенну базовой радиостанции 86.к (к=1, 2, …, К) установить в его центре, то круговая форма диаграммы направленности будет покрывать почти всю его площадь. Все микрозоны (соты) связаны соединительными линиями с центральной радиостанцией 85, которая, в свою очередь, соединена с автоматической телефонной сетью (АТС), а через нее и с диспетчерским геодезическим пунктом 1. В качестве соединительных линий могут использоваться кабели и радиорелейные линии. Расчет и практика использования сотовых систем связи показывают, что радиусы зон ячеек могут быть в пределах от 2 до 10 км.
В качестве системы 8 приема и передачи информации может использоваться и спутниковая система связи (фиг. 7). При этом искусственные спутники Земли могут размещаться на низких или высоких (геостационарных) орбитах.
Следовательно, в состав предлагаемой системы входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и приемники GPS-сигналов, установленные на диспетчерском геодезическом пункте 1, на погрузчиках 5.i (i=1, 2, …, n) и трейлерах 6.j (j=1, 2, …, m). Приемники GPS-сигналов позволяют определять координаты погрузчиков (трейлеров) (широту и долготу), скорость их движения и точное время.
Каждый GPS-спутник излучает на двух частотах (ωI=1757 МГц и ωII=12,275 МГц) специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМН) сигнала, манипулированного по фазе псевдослучайной последовательностью. В сигнале зашифровываются два вида кодов. Один из них - код С/А - доступен широкому кругу гражданских потребителей, в том числе и предлагаемой системе. Он позволяет получать лишь приблизительную оценку местоположения погрузчиков (трейлеров), поэтому называется «грубым» кодом. Передача кода С/А осуществляется на частоте ωI=1575 МГц с использованием фазовой манипуляцией псевдослучайной последовательностью длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А-кода - 1 мс. Тактовая частота - 1,023 МГц.
Другой код - Р - обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS, используется военным ведомством США.
Автоматизированная система управления восстановлением объектов инфраструктуры функционирует следующим образом.
С целью передачи необходимой информации на избранный погрузчик 5.i (i=1, 2, …, n) и/или трейлер 6.j (j=1, 2, …, m) на диспетчерском геодезическом пункте 1 с помощью компьютера 9 включается задающий генератор 10, который формирует высокочастотный сигнал
uc (t)=Uc⋅cos(ωct+φc), 0≤t≤Тс
где Uc, ωc, φс, Тс - амплитуда, несущая частота, начальная фаза и длительность сигнала.
Данный сигнал с выхода задающего генератора 10 поступает на первый вход фазового манипулятора 12, на второй вход которого подается модулирующий код M1(t) с выхода источника 11 дискретных сообщений. На выходе фазового манипулятора 12 образуется фазоманипулированный (ФМН) сигнал
u1(t)=U1⋅cos(ωct+φk1(t)+φс), 0≤t≤Тс
где φk1(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M1(t), причем φk1(t)=const при Кτэ<t<(k+1)τэ и может изменяться скачком при t=Кτэ, т.е. на границах между элементарными посылками (К=1, 2, …, N-1);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс (Тс=τэ⋅N).
Этот сигнал поступает на первый вход амплитудного модулятора 14, на второй вход которого подается модулирующая функция m1(t) с выхода источника 13 аналоговых сообщений. На выходе амплитудного модулятора 14 образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМН-AM)
u2(t)=Uc[1+m1(t)]⋅cos(ωct+φk1(t)+φс), 0≤t≤Tc,
где m1(t) - модулирующая функция, отображающая закон амплитудной модуляции.
Работа источников дискретных 11 и аналоговых 13 сообщений синхронизируется компьютером 9.
Сформированный сигнал u2(t) поступает на первый вход первого смесителя 16, на второй вход которого подается напряжение первого гетеродина 15

На выходе смесителя 16 образуются напряжения комбинационных частот. Усилителем 18 выделяется напряжение первой промежуточной (суммарной) частоты
Uпз1(t)=Uпр1[1+m1(t)]⋅cos(ωпр1t+φk(t)+φпр1), 0≤t≤Тс,
где 
 - первая промежуточная (суммарная) частота;
- первая промежуточная (суммарная) частота;

которое после усиления в усилителе 19 мощности через дуплексер 20 поступает в приемопередающую антенну 21, излучается ею на частоте ω1 в эфир (в направлении строительного комплекса), улавливается приемопередающей антенной 50 погрузчика или трейлера и через дуплексер 49 и усилитель 51 мощности поступает на первый вход смесителя 52, на второй вход которого подается напряжение гетеродина 46 
На выходе смесителя 52 образуются напряжения комбинационных частот.
Усилителями 53 и 90 выделяются напряжения второй промежуточной (разностной) и первой суммарной частот соответственно:
uпр2(t)=Uпр2[1+m1(t)]⋅cos[ωпр2t+φk1(t)+φпр2],
u∑1(t)=Uпр2[1+m1(t)]⋅cos[ω∑1t+φk1(t)+φ∑1], 0≤t≤Тс,
где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;
 - первая суммарная частота;
- первая суммарная частота;

Напряжение u∑1(t) первой суммарной частоты поступает на вход амплитудного детектора 91, который выделает его огибающую. Последняя поступает на управляющий вход ключа 92 и открывает его. В исходном состоянии ключ 92 всегда закрыт. При этом напряжение uпр2(t) через открытый ключ 92 поступает на вход усилителя-ограничителя 54, на выходе которого образуется напряжение
u3(t)=U0⋅cos(ωпр2t+φk1(t)+φпр2), 0≤t≤Тс,
где U0 - порог ограничения усилителя-ограничителя 54,
которое представляет собой ФМН-сигнал, используется в качестве опорного напряжения и поступает на второй (опорный) вход синхронного детектора 55. На первый (информационный) вход синхронного детектора 55 подается напряжение uпр2 (t) с выхода усилителя 53 второй промежуточной частоты. На выходе синхронного детектора 55 образуется низкочастотное напряжение
uн1(t)=Uн1[1+m1(t)],
где 
пропорциональное модулирующей функции m1(t). Это напряжение поступает в микропроцессор 40.
Напряжение u3(t) с выхода усилителя-ограничителя 54 одновременно поступает на первый вход перемножителя 56, на второй вход которого подается напряжение uг1(t) с выхода гетеродина 46. На выходе перемножителя 56 образуется напряжение

где 


которое представляет собой ФМН-сигнал на частоте  гетеродина 44. Это напряжение выделяется полосовым фильтром 57 и поступает на первый (информационный) вход фазового детектора 58, на второй (опорный) вход которого подается напряжение гетеродина 44
гетеродина 44. Это напряжение выделяется полосовым фильтром 57 и поступает на первый (информационный) вход фазового детектора 58, на второй (опорный) вход которого подается напряжение гетеродина 44

На выходе фазового детектора 58 образуется низкочастотное напряжение
uн2(t)=Uн2⋅cos φk1(t),
где 
пропорциональное модулирующему коду M1 (t). Это напряжение поступает в микропроцессор 40.
Частоты  и
и  гетеродинов разнесены на значение второй промежуточной частоты (фиг. 3)
гетеродинов разнесены на значение второй промежуточной частоты (фиг. 3)

Следовательно, в дискретных и аналоговых сообщениях, передаваемых с диспетчерского геодезического пункта 1 на выбранный погрузчик и/или трейлер, содержится вся необходимая информация водителю и/или водителям о номерах строительных блоков (модулей), их местоположении, порядке действий и т.п.
Скорость обновления навигационных данных - 1 с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения погрузчика (трейлера).
Определение навигационных параметров может производиться в двух режимах - 2Д (двухмерном) и 3Д (пространственном). В режиме 2Д устанавливаются широта и долгота. Для этого достаточно присутствия в зоне радиовидимости трех спутников. Точность определения местоположения погрузчика (трейлера) - 15-20 м.
Один из основных методов повышения точности определения местонахождения погрузчика (трейлера) и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты погрузчика (трейлера) с точностью до 5 м в динамической навигационной обстановке и до 2 м в стационарных условиях.
Дифференциальный режим реализуется с помощью приемника 32 GPS-сигналов, размещенного на диспетчерском геодезическом пункте 1. Приемник 32 GPS-сигналов является многоканальным, каждый канал отслеживает один видимый спутник. Необходимость непрерывного отслеживания каждого КА обусловлена тем, что указанный приемник должен «захватывать» навигационные сообщения раньше, чем приемники погрузчиков (трейлеров). Сравнивая известные координаты, полученные в результате прецизионной геодезической съемки, с измеренными, прибор 33 вырабатывает дифференциальные поправки, которые передаются погрузчикам (трейлерам) по радиоканалу с помощью задающего генератора 34, фазового манипулятора 35, усилителя 36 мощности и передающей антенны 37 в заранее оговоренном формате.
Аппаратура погрузчика (трейлера) включает в себя первый приемник, который и позволяет получать дифференциальные поправки с диспетчерского геодезического пункта 1. Поправки, принятые с пункта 1, автоматически вносятся в результаты собственных измерений вторым приемником погрузчика (трейлера).
Для каждого КА, сигналы которого поступают на приемную антенну 64, поправка, полученная от пункта 1, складывается с результатом измерения псевдодальности.
Для точного определения местоположения погрузчиков и трейлеров на диспетчерском геодезическом пункте 1 задающим генератором 34 формируется высокочастотный сигнал
uc1(t)=Uc1⋅cos(ωc1t+φc1), 0≤t≤Tc1,
который поступает на первый вход фазового манипулятора 35, на второй вход которого с выхода прибора 33 дифференциальных поправок поступает модулирующий код M2(t), содержащий соответствующие поправки к определению местоположения выбранного погрузчика и/или трейлера. На выходе фазового манипулятора 35 образуется ФМН-сигнал
u5(t)=U5⋅cos(ωc1t+φk2(t)+φc1), 0≤t≤Тс1,
где φк2(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М2(t), который после усиления в усилителе 36 мощности поступает в приемную антенну 37, излучается ею в эфир, улавливается приемной антенной 59 и через усилитель 60 высокой частоты поступает на два входа фазового детектора 62 непосредственно и через линию задержки 61, время задержки τз1 которой выбирается равной длительности τэ элементарных посылок (τз1=τэ)
u6(t)=U5(t-ιз1)=U5⋅cos[ωc1(t-ιз1)+φk2(t-ιз1)+φс1].
На выходе фазового детектора 62 образуется низкочастотное напряжение
uн3(t)=Uн3⋅cos φk2(t), 0≤t≤Тс1,
где 
которое поступает на первый вход блока 63 определения местоположения погрузчика (трейлера).
Для точного определения местоположения погрузчика (трейлера) используется и второй приемник 65 с приемной антенной 64, размещенный на его борту, который последовательно захватывает и обрабатывает С/А-сигналы спутниковой системы «Навстар» («Глонасс»). При этом данный приемник попеременно использует два основных режима работы - приема информации и навигационный. В навигационном режиме каждую секунду уточняется местоположение погрузчика (трейлера) и выдаются основные навигационные данные. В режиме приема информации принимаются данные эфемерид и поправок времени, необходимые для навигационного режима, и производятся более редкие (через одну минуту) навигационные измерения.
Микропроцессор 40 выполняет две основные функции: обслуживает второй приемник 65 и производит навигационные расчеты. Первая заключается в выборе рабочего созвездия спутников, вычислении данных целеуказания и управлении работой второго приемника, например, переключение из режима приема информации в навигационный режим и обратно. Вторая функция микропроцессора 40 состоит в расчете эфемерид, определении координат местоположения погрузчика (трейлера) и выдаче для отображения на дисплее, который входит в состав блока 63 определения местоположения погрузчика (трейлера).
При получении информации диспетчерского геодезического пункта 1 о номерах и местоположении строительных блоков (модулей), которые необходимо обнаружить и погрузить (разгрузить) на соответствующее транспортное средство, погрузчик (трейлер) прибывает в заданный район и включает считыватель. При этом задающий генератор 41 формирует высокочастотный сигнал (считывающий радиоимпульс)
uc(t)=Uс⋅cos(ωct+φс), 0≤t≤Тс,
Синтезатором 93 несущих частот формируются запросные радиоимпульса
us1(t)=Us1⋅cos(ωs1t+φs1),
Us2(t)=Us2⋅cos(ωs2t+φs2),
Usc(t)=Usc⋅cos(ωsct+φsc),
Usn(t)=Usn⋅cos(ωsnt+φsn), 0≤t≤Tc,
где Ts - длительность запросных радиоимпульсов;
n - количество модулей, находящихся в зоне радиоизлучения
Считывающий радиоимпульс Uc (t) и первый запросный радиоимпульс Us1 (t) через логический элемент 94, усилитель 66 мощности и дуплексер 67 поступает в рупорную приемопередающую антенну 68, излучается ею в эфир и облучает ближайший строительный блок (модуль)радиочастотной меткой.
Первый запросный радиоимпульс Us1 (t) выделяется первым узкополосным фильтром 96.1, настроенным на частоту Ws1, и детектируется первым амплитудным детектором 97.1. Продетектированное напряжение (огибаются) поступает на управляющие входы ключей 98.1 и 99.1, открывая их. В исходном состоянии ключи 98.1 и 99.1 всегда закрыты. При этом считывающий радиоимпульс Uc(t) с выхода приемопередающей антенны 80.1 через открытые ключи 98.1 и 99.1 поступает на пьезокристалл 79.1 с нанесенным на его поверхность алюминиевым тонкопленочным ВШП.
Принимаемый считывающий радио импульс Uc(t) преобразуется ВШП в акустическую волну, которая распространяется по поверхности пьезокристалла 79.1, отражается от набора отражателей 84.1 и опять преобразуется в сложный сигнал с фазовой манипуляцией (ФМн).
u7(t)=Uc⋅cos(ωc1t+φk3(t)+φс), 0≤t≤Тс,
где φk3(t)={0, π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М3(t), отображающим идентификационный номер строительного блока (модуля) и определяется топологией встречно-штыревого преобразователя.
Сформированный сложный ФМн-сигнал u7(t) излучается микрополосковой антенной 80.1 в эфир, улавливается рупорной приемопередающей антенной 68 и через дуплексер 67 и усилитель 69 мощности поступает на первый (информационный) вход фазового детектора 70. На второй (опорный) вход фазового детектора 70 в качестве опорного напряжения подается высокочастотный сигнал uc(t) с выхода задающего генератора 41. На выходе фазового детектора 70 образуется низкочастотное напряжение
uн4(t)=Uн4⋅cos φk3(t), 0≤t≤Тс,
где 
пропорциональное модулирующему коду М3(t).
Это напряжение поступает на первый вход коррелятора 71, на второй вход которого подаются модулирующие коды, отражающие номера запрашиваемых строительных блоков (модулей). Если модулирующие коды совпадают, то на выходе коррелятора 71 формируется максимальное напряжение Umax, которое превышает пороговое напряжение Uпор в пороговом блоке 72 (Umax>Uпор). При превышении порогового уровня Uпор в пороговом блоке 72 формируется постоянное напряжение, которое поступает на управляющий вход ключа 76, открывая его, на световой 73 и звуковой 74 маячки, заставляя их работать. В исходном состоянии ключ 76 всегда закрыт. Световой, и звуковой сигналы свидетельствуют об обнаружении необходимого строительного блока (модуля), номер которого регистрируется блоком 75 регистрации. Одновременно низкочастотное напряжение uH4(t), пропорциональное модулирующему коду М3(t), с выхода фазового детектора 70 через открытый ключ 76 поступает на вход линии 77 задержки, где задерживается на время τз2, равное длительности номера погрузчика (трейлера) и его местоположения, и поступает на первый вход сумматора 78. На второй вход последнего подается номер погрузчика (трейлера) со второго выхода датчика 38 номера погрузчика (трейлера). На третий вход сумматора 78 подается код местоположения погрузчика (трейлера) из микропроцессора 40. На выходе сумматора 78 образуется суммарный модулирующий код M∑(t), состоящий из модулирующего кода М3(t), номера M4(t) погрузчика (трейлера) и его местоположения M5(t)
M2(t)=M3(t)+M4(t)+M5(t), длительностью τз2.
Модулирующий код M∑(t) с выхода сумматора 78, коды номера погрузчика (трейлера) и его состояния вместе с информацией о местоположении, текущем времени и найденных строительных блоков (модулей) передаются на диспетчерский геодезический пункт 1. Для этого используются датчик 38 номера погрузчика (трейлера), датчик 39 погрузки-разгрузки (состояния погрузчика), блок 63 определения местоположения погрузчика (трейлера), микропроцессор 40, задающий генератор 41, фазовый манипулятор 42 и амплитудный модулятор 43. На выходе последнего образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМН-AM)
u8(t)=Uc[1+m2(t)]⋅cos[ωct+φk4(t)+φc], 0≤t≤Тс,
который поступает на первый вход смесителя 45, на второй вход которого подается напряжение гетеродина 44

На выходе смесителя 45 образуются напряжения комбинационных частот, усилителем 47 выделяется напряжение третьей промежуточной (разностной) частоты
uпр3(t)=Uпр3[1+m2(t)]⋅cos[ωпр3t-φk4(t)+φпр3], 0≤t≤Тс,
где 
 - третья промежуточная (разностная) частота;
- третья промежуточная (разностная) частота;

которое после усиления в усилителе 48 мощности через дуплексер 49 поступает в приемопередающую антенну 50, излучается ею в эфир на частоте  улавливается приемопередающей антенной 21 диспетчерского геодезического пункта 1 и через дуплексер 20 и усилитель 22 мощности поступает на первый вход смесителя 23, на второй вход которого подается напряжение гетеродина 17
улавливается приемопередающей антенной 21 диспетчерского геодезического пункта 1 и через дуплексер 20 и усилитель 22 мощности поступает на первый вход смесителя 23, на второй вход которого подается напряжение гетеродина 17

На выходе смесителя 23 образуются напряжения комбинационных частот.
Усилителями 24 и 87 выделяются напряжения второй промежуточной (разностной) и второй суммарной частот соответственно:
uпp4(t)=Uпр4[1+m2(t)]⋅cos[ωпр2t+φk4(t)+φпр2],
u∑2(t)=Uпр4[1+m2(t)]⋅cos[ω∑2t+φk4(t)+φ∑2], 0≤t≤Тс,
где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;
 - вторая суммарная частота;
- вторая суммарная частота;

Напряжение u∑2(t) второй суммарной частоты поступает на вход амплитудного детектора 88, который выделает его огибающую. Последняя поступает на управляющий вход ключа 89 и открывает его. В исходном состоянии ключ всегда закрыт. При этом напряжение uпр4(t) через открытый ключ 89 поступает на вход усилителя-ограничителя 25, на выходе которого образуется напряжение
u9(t)=U0⋅cos[(ωпр2t+φk4(t)+φпр2], 0≤t≤Тс,
где U0 - порог ограничения,
которое поступает на второй (опорный) вход синхронного детектора 26, на первый (информационный) вход которого подается напряжение Uпр4(t) с выхода ключа 89. На выходе синхронного детектора 26 образуется низкочастотное напряжение
uн5(t)=Uн5[1+m2(t)],
где 
пропорциональное модулирующей функции m2(t).
Это напряжение поступает в компьютер 9 и затем может регистрироваться блоком 30 регистрации.
Напряжение u9(t) с выхода усилителя-ограничителя 25 одновременно поступает на первый вход перемножителя 27, на второй вход которого подается напряжение с выхода гетеродина 17. На выходе перемножителя 27 образуется напряжение

где 


которое выделяется полосовым фильтром 28 и поступает на первый (информационный) вход фазового детектора 29, на второй (опорный) вход которого подается напряжение гетеродина 15
На выходе фазового детектора 29 образуется низкочастотное напряжение
Uн6(t)=Uн6⋅cosφk4(t),
где 
пропорциональное модулирующему коду M∑(t). Это напряжение поступает в компьютер 9, а затем может регистрироваться блоком 30 регистрации. В качестве блока 30 регистрации может использоваться монитор компьютера 9 с изображением электронной карты местности строительного комплекса, города, Северо-Западного региона и т.д. На указанную карту выводится информация о местонахождении и перемещении строительных блоков (модулей). При этом погрузчики 5.i (i=1, 2, …, n) используются для обнаружения, погрузки и перемещения строительных блоков (модулей) из домокомбината на склады 3 и в зону отгрузки 4, а трейлеры 6.j (j=1, 2, …, m) для перемещения строительных блоков (модулей) к устройствам 7.1 (1=1, 2, …, 1) для управления робототехнологическими комплексами.
Узкополосные фильтры 96.i всех блоков 95.i доступности к ВШП настроены на частоты Wsi запросных радиоимпульсов (i=1, 2…, n). Длительность Ts каждого запросного радиоимпульса выбирается током, чтобы сформированная считывающие радиоимпульсом Uc(t) кодовое последовательность Mz(t) успела бы поступить полностью на компьютер 9.
При излучении считывающего радиоимпульса Uc(t) и первого запросного радиоимпульса Us1(t) дуплексер 67 командой с микропроцессора 40 устанавливается в режим передачи. После передачи указанных радиоимпульсов через время t дуплексер 67 по команде с микропроцессора 40 переводится в режим приема. Затем синтезатор 93 несущих частот по команде микропроцессора 40 формирует второй запросный радиоимпульс Us2(t). В этом случае запросный радиоимпульс Us2(t) выделяется узкополосным фильтром 96.2 второго блока 95.2 доступности к ВШП. Далее все происходит, как в предыдущем случае, и так до тех пор, пока не будут считаны все модули, находящиеся в зоне радиооблучения.
Описанная выше работа дуплексных радиостанций, размещенных на диспетчерском геодезическом пункте и погрузчиках (трейлерах), соответствует случаю приема полезных ФМН-АМ сигналов по основным каналам на частотах ω1 и ω2 (фиг. 3).
Если ложный сигнал (помеха) поступает по первому зеркальному каналу на частоту ω3,
uз1(t)=Uз1⋅cos((ωз1t+φз1). 0≤t≤Тз,
то на выходе смесителя 52 образуются напряжения:
uпр5(t)=Uпр5⋅cos(ωпр2t+φпр5),
u∑3(t)=Uпр5⋅cos(ω∑3t+φ∑3), 0≤t≤Тз
где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;
 - третья суммарная частота;
- третья суммарная частота;

Напряжение uпр5(t) выделяется усилителем 53 второй промежуточной частоты. Так как частота настройки ωH усилителя 90 первой суммарной частоты выбрана равной ω=ω∑1=ω∑2, напряжение u∑3(t) не попадает в полосу пропускания усилителя 90 первой суммарной частоты. Ключ 92 не открывается, и ложный сигнал (помеха), принимаемый по первому зеркальному каналу на частоте ωз1 подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по первому ωк1 и второму ωк2 комбинационным каналам.
Если ложный сигнал (помеха) поступает по второму зеркальному каналу на частоте ωз2
uз2(t)=Uз2⋅cos(ωз2t+φз2). 0≤t≤Тз2,
то на выходе смесителя 23 образуются следующие напряжения:
uпр6(t)=Uпр6⋅cos(ωпр2t+φпр6),
u∑4(t)=Unp6⋅cos(ω∑4t+φ∑4), 0≤t≤Тз2
где 
 - вторая промежуточная (разностная) частота;
- вторая промежуточная (разностная) частота;
 - четвертая суммарная частота;
- четвертая суммарная частота;

Напряжение Uпр6 (t) выделяется усилителем 24 второй промежуточной частоты. Так как частота настройки сон усилителя 87 второй суммарной частоты выбрана равной ωН=ω∑1=ω∑2, то напряжение u∑4 (t) не попадает в полосу пропускания усилителя 87 второй суммарной частоты. Ключ 89 не открывается и ложный сигнал (помеха), принимаемый по второму зеркальному каналу на частоте ωЗ2, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по первому ωКЗ и второму ωК4 комбинационным каналам.
Описанная выше работа предлагаемой системы соответствует случаю, когда диспетчерский геодезический пункт 1 находится на незначительном расстоянии от строительного комплекса. При этом данная система обеспечивает обнаружение необходимых строительных блоков (модулей), контролирует перемещение строительных блоков (модулей) от домокомбината и складов до строительной площадки.
При организации региональных перевозок, доставке строительных блоков (модулей) на строительные площадки, удаленные от домокомбинатов на значительные расстояния используется система 8 приема и передачи информации, в качестве которой могут применяться радиотелефонная система общего пользования с сотовой структурой и спутниковая система связи.
При использовании радиотелефонной системы общего пользования с сотовой структурой (фиг. 6) информация с диспетчерского геодезического пункта 1 по телефонной сети поступает на центральную радиостанцию 85, а затем по соединительной линии на базовую радиостанцию 86.к (к=1, 2, …, К) той микрозоны (соты), где находится вызываемый погрузчик 5.i (i=1, 2, …, n) или трейлер 6.j (j=1, 2, …, m). Базовая радиостанция излучает сигнал, содержащий необходимую информацию, который принимается приемником дуплексной радиостанции, размещенной на погрузчике (трейлере). Погрузчик (трейлер) указанной радиостанции излучает сигнал, содержащий ответную информацию, который принимается базовой радиостанцией той микрозоны (соты), где появляется или находится погрузчик (трейлер). От базовой радиостанции данный сигнал поступает на центральную радиостанцию, а затем через АТС на диспетчерский пункт 1, где фиксируются номер погрузчика (трейлера), передаваемая информация и географические координаты его местоположения.
В качестве системы 8 приема и передачи информации может использоваться спутниковая система связи (фиг. 7). При этом диаграмма направленности бортовой антенны геостационарного ИСЗ-ретранслятора S выбирается так, чтобы ретранслированный сигнал мог быть принят в наземных пунктах А, В, и С. На наземном пункте А может располагаться диспетчерский геодезический пункт, а на пункте В - домокомбинат или трейлеры, перевозящие строителные блоки (модули), на пункте С - строительная площадка.
Предлагаемая система обеспечивает повышение оперативности и точности определения местоположения контейнеров в процессе их транспортирования (точность 20-100 м) и складирования (точность 1-5 м).
Кроме того, данная система позволяет:
- оперативно планировать работу, используя текущую информацию на строительном комплексе;
- свести до минимума ручные операции;
- оптимизировать работу погрузочной техники за счет использования диалогового режима при выдаче команд, точной информации о местоположении погрузчиков, оптимизации размещения строительных блоков (модулей) и минимизации перемещений порожних трейлеров;
- сократить время простоя трейлеров, автомашин, благодаря планированию работы персонала и погрузочной техники и информации о текущем расположении строительных блоков (модулей);
- протоколировать время начала, окончания и выполнения операций каждым работником терминала;
- фиксировать и уведомлять менеджера об отклонениях движения погрузчиков от намеченной траектории, т.е. фактах выхода погрузчика за пределы рабочей зоны, неоправданно долгих простоях погрузчика в какой-либо зоне;
- фиксировать достижение трейлером определенной зоны терминала и, следовательно, сокращать простой трейлеров в очередях.
Предлагаемая система обеспечивает повышение помехоустойчивости и достоверности обмена аналоговой и дискретной информацией между диспетчерским геодезическим пунктом и погрузчиками (трейлерами). Это достигается путем подавления ложных сигналов (помех), принимаемых по зеркальным и комбинационным каналам. Причем для подавления ложных сигналов (помех), принимаемых по дополнительным каналам, используется метод суммарной частоты.
Следует отметить, что смесители представляют собой перемножители и при работе на линейных участках вольт-амперной характеристики на выходе смесителей образуются напряжения разностной (промежуточной) и суммарной частот. Как правило, используются только напряжения разностной (промежуточной) частоты. В предлагаемом техническом решении используются и напряжения суммарной частоты для подавления ложных сигналов (помех), принимаемых по дополнительным каналам. Метод суммарной частоты отличается оригинальностью, высокой эффективностью и простотой технической реализации.
Каждый погрузчик (трейлер) снабжен считывателем, который имеет следующие основные характеристики:
- мощности передатчика считывателя - не более 10 МВт;
- частотный диапазон - 900-920 МГц;
- дальность обнаружения строительных блоков (модулей) - несколько десятков метров
Строительные блоки (модули) снабжены радиочастотными метками на поверхностных акустических волнах. Габариты каждой радиочастотной метки - 8×15×5 мм, срок службы - не менее 20 лет, потребляемая мощность - 0 Вт.
Используемые радиочастотные метки предоставляют возможность дистанционного считывания информации о строительных блоках (модулей) неограниченное число раз в автоматическом режиме.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение достоверности считывания индивидуальных кодов одновременно с нескольких блоков (модулей), находящихся в зоне радиозондирования. Это достигается использованием запросных радиоимпульсов Usi(t) и блоков 95.i доступности к встречно-штыревым преобразователям (ВШП) (i=1, 2, …, n, где n - количество модулей, находящихся в зоне радиооблучения), которые позволяют последовательно во времени опрашивать все модули, находящиеся одновременно в зоне радиооблучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления строительным комплексом | 2018 |
|
RU2696064C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ КОМПЛЕКСОМ | 2016 |
|
RU2615025C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры | 2019 |
|
RU2733054C1 |
| Система дистанционного контроля за транспортировкой высокотехнологичных строительных модулей | 2018 |
|
RU2699451C1 |
| Система контроля транспортировки специальных грузов | 2019 |
|
RU2725769C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ВЫСОКОТЕХНОЛОГИЧНЫХ СТРОИТЕЛЬНЫХ МОДУЛЕЙ | 2016 |
|
RU2619200C1 |
| Система дистанционного контроля поставки материальных и технических ресурсов для восстановления объектов инфраструктуры | 2020 |
|
RU2734064C1 |
Изобретение относится к автоматизированным системам управления (АСУ) и может найти применение в АСУ строительным комплексом, включающим геодезический диспетчерский пункт, домокомбинат для производства строительных модулей, блоков и материалов, строительную площадку для возведения многоэтажных домов и сооружений и систему приема и передачи информации и может быть использовано для принятия оперативных и обоснованных решений на всех уровнях управления и контроля за погрузочно-разгрузочными и транспортно-складскими процессами с использованием компьютерной техники и радиочастотных меток. Технический результат – повышение надежности. Для этого АСУ строительным комплексом содержит диспетчерский геодезический пункт 1, домокомбинат 2 для производства строительных модулей, блоков и материалов, склады строительных модулей, блоков и материалов, строительную площадку 4, погрузчики 5.i (i=1, 2, …, n), трейлеры 6.j (j=1, 2, …, m), устройства 7.1 (i=1, 2, …, I) для управления робототехнологическими комплексами и систему 8 приема и передачи информации (ППИ). Дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит компьютер 9, первый задающий генератор 10, источник 11 дискретных сообщений, первый фазовый манипулятор 12, источник 13 непрерывных сообщений, амплитудный модулятор 14, первый гетеродин 15, первый смеситель 16, второй гетеродин 17, первый усилитель 18 первой промежуточной частоты, первый усилитель 19 мощности, первый дуплексер 20, приемопередающую антенну 21, второй усилитель 22 мощности, второй смеситель 23, первый усилитель 24 второй промежуточной частоты, первый усилитель - ограничитель 25, первый синхронный детектор 26, первый перемножитель 27, первый полосовой фильтр 28, первый фазовый детектор 29, первый блок 30 регистрации, первый усилитель 87 суммарной частоты, первый амплитудный детектор 88 и второй ключ 89. Передающая радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит прибор 33 дифференциальных поправок, второй задающий генератор 34, второй фазовый манипулятор 35, третий усилитель 36 мощности, передающую антенну 37, приемник 32 GPS-сигналов с антенной 31. Дуплексная радиостанция, размещаемая на каждом погрузчике (трейлере), содержит датчик 38 номера погрузчика (трейлера), датчик 39 погрузки-разгрузки, микропроцессор 40, третий задающий генератор 41, третий фазовый манипулятор 42, второй амплитудный модулятор 43, третий гетеродин 44, третий смеситель 45, четвертый гетеродин 46, второй усилитель 47 второй промежуточной частоты, четвертый усилитель 48 мощности, второй дуплексер 49, вторую приемопередающую антенну 50, пятый усилитель 51 мощности, четвертый смеситель 52, второй усилитель 53 первой промежуточной частоты, второй усилитель-ограничитель 54, второй синхронный детектор 55, второй перемножитель 56, второй полосовой фильтр 57, второй фазовый детектор 58, вторую приемную антенну 59, усилитель 60 высокой частоты, первую линию задержки 61, третий фазовый детектор 62, блок 63 определения местоположения погрузчика (трейлера), третью приемную антенну 64, второй приемник 65, шестой усилитель 66 мощности, третий детектор 67, третью приемопередающую антенну 68, седьмой усилитель 69 мощности, четвертый фазовый детектор 70, коррелятор 71, пороговый блок 72, световой маячок 73, звуковой маячок 74, второй блок регистрации 75, ключ 76, вторую линию задержки 77, сумматор 78, синтезатор 93 несущих частот и логический элемент 94. Каждая радиочастотная метка содержит пьезокристалл 79.i, приемопередающую антенну 80.i, электроды 81.i, шины 82.i и 83.i, набор отражателей 84.1, блок 95.i доступности к ВШП, узкополосный фильтр 96.i, амплитудный детектор 97.i, ключи 98.i и 99.i (i=1,2…, n). В результате повышение надежности АСУ обеспечивается на основе повышения достоверности считывания индивидуальных кодов одновременно с нескольких блоков (модулей), находящихся в зоне радиозондирования, путем последовательного во времени их радиоопроса. 7 ил.
Автоматизированная система управления восстановлением объектов инфраструктуры, содержащая диспетчерский геодезический пункт, на котором установлены приемник GPS-сигналов с антенной, предназначенный для приема навигационного сигнала, используемого для вычисления дифференциальных поправок, передающую радиостанцию, предназначенную для передачи дифференциальных поправок на погрузчики и трейлеры, и дуплексную радиостанцию, на каждом погрузчике и трейлере установлены дуплексная радиостанция, первый приемник с антенной, предназначенный для получения дифференциальных поправок с диспетчерского геодезического пункта, и второй приемник с антенной, предназначенный для приема навигационного GPS-сигнала, используемого для вычисления дифференциальных поправок, при этом между диспетчерским геодезическим пунктом и каждым погрузчиком и трейлером установлены пейджинговая и двухсторонняя радиосвязи непосредственно и/или через систему приема и передачи информации, дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, содержит последовательно включенные компьютер, первый задающий генератор, первый фазовый манипулятор, второй вход которого через источник дискретного сообщения соединен с компьютером, первый амплитудный модулятор, второй вход которого через источник аналогового сообщения соединен с компьютером, первый смеситель, второй вход которого соединен с выходом первого гетеродина, первый усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина и первый усилитель суммарной частоты, первый амплитудный детектор, второй ключ, второй вход которого через первый усилитель второй промежуточной частоты соединен с выходом второго смесителя, первый усилитель-ограничитель, первый синхронный детектор, второй вход которого соединен с выходом второго ключа, компьютер и первый блок регистрации, последовательно подключенные к выходу первого усилителя-ограничителя первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр и первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, передающая радиостанция содержит последовательно включенные второй задающий генератор, второй фазовый манипулятор, второй вход которого соединен с прибором дифференциальных поправок, подключенным к выходу приемника GPS-сигналов с антенной, третий усилитель мощности и передающую антенну, дуплексная радиостанция, размещенная на каждом погрузчике и трейлере, содержит последовательно включенные микропроцессор, к которому подключены датчик номера погрузчика или трейлера и датчик погрузки-разгрузки погрузчика или трейлера, третий задающий генератор, третий фазовый манипулятор, второй амплитудный модулятор, второй вход которого соединен с микропроцессором, третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, четвертый усилитель мощности, второй дуплексер, вход-выход которого связан со второй приемопередающей антенной, пятый усилитель мощности, четвертый смеситель, второй вход которого соединен с выходом четвертого гетеродина, и второй усилитель суммарной частоты, второй амплитудный детектор, третий ключ, второй вход которого через второй усилитель первой промежуточной частоты соединен с выходом четвертого смесителя, второй усилитель-ограничитель, второй синхронный детектор, второй вход которого соединен с выходом третьего ключа, и микропроцессор, последовательно подключенные к выходу второго усилителя-ограничителя второй перемножитель, второй вход которого соединен с выходом четвертого гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к микропроцессору, первый приемник, размещенный на каждом погрузчике и трейлере, содержит последовательно включенные вторую приемную антенну, усилитель высокой частоты, первую линию задержки, третий фазовый детектор, второй вход которого соединен с выходом усилителя высокой частоты, и блок определения местоположения погрузчика или трейлера, второй вход и выход которого подключены к микропроцессору дуплексной радиостанции, второй приемник с третьей приемной антенной, размещенный на каждом погрузчике и трейлере, подключен к микропроцессору дуплексной радиостанции, последовательно включенные шестой усилитель мощности, третий дуплексер, вход-выход которого связан с третьей приемопередающей антенной, седьмой усилитель мощности, четвертый фазовый детектор, второй вход которого соединен с выходом третьего задающего генератора, коррелятор, второй вход которого соединен с микропроцессором, пороговый блок, первый ключ, второй вход которого соединен с выходом четвертого фазового детектора, вторая линия задержки, сумматор, второй и третий входы которого соединены со вторым выходом датчика номера погрузчика или трейлера и микропроцессором соответственно, а выход подключен ко второму входу третьего фазового манипулятора, к выходу порогового блока подключены световой и звуковой маячки, к выходу первого ключа подключен второй блок регистрации, каждый строительный модуль и блок снабжен радиочастотной меткой, выполненной в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем поверхностных акустических волн и набором отражателей, причем встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, нанесенных на поверхность пьезокристалла, электроды каждой из гребенок соединены друг с другом шинами, которые, в свою очередь, соединены с микрополосковой приемопередающей антенной, изготовленной также на поверхности пьезокристалла, отличающаяся тем, что снабжена синтезатором несущих частот и логическим элементом И, причем к микропроцессору последовательно подключены синтезатор несущих частот и логический элемент И, второй вход которого через третий задающий генератор соединен с микропроцессором, а выход подключен к входу шестого усилителя мощности, управляющий вход третьего дуплексера подключен к микропроцессору, строительные модули снабжены радиочастотными метками и блоками доступности к встречно-штыревым преобразователям (i=1, 2, …, n), где n больше или равно количеству строительных модулей, находящихся в зоне радиооблучения, каждый блок доступности к встречно-штыревому преобразователю состоит из последовательно подключенных к приемопередающей антенне узкополосного фильтра, амплитудного детектора и двух ключей, включенных между приемопередающей антенной и шинами встречно-штыревого преобразователя соответственно.
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| US 5574648 А1, 12.11.1996 | |||
| ПОДШИПНИК СКОЛЬЖЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2438877C2 |
| АВТОМАТИЗИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ РЕМОНТА С ПРИМЕНЕНИЕМ МОБИЛЬНОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2008 |
|
RU2420777C2 |

