Предлагаемая система относится к области дистанционного контроля и управления объектами жизнеобеспечения (теплоснабжения, водоснабжения, газоснабжения, электроснабжения, канализации, вентиляции, безопасности и т.д.) городской инфраструктуры, выполненными с возможностью перемещения, и может быть использована для принятия решений на всех уровнях контроля и управления технологическими процессами на указанных объектах с использованием компьютерной техники и радиочастотных меток.
Традиционно эксплуатация объектов жизнеобеспечения городской инфраструктуры, финансируется по, так называемому «остаточному принципу». Такой подход привел к тому, что большая часть оборудования объектов жизнеобеспечения выработала свой ресурс и его износ составляется от 50 до 80 %. Особенно неблагоприятная ситуация сложилась в теплоснабжении городской инфраструктуры.
Суровые климатические условия, характерные для большой части территории России, предопределяют теплоснабжение как наиболее значимой как в социальном, так и в техническом отношении сектор экономики.
Около 50 % объектов теплоснабжения и тепловых сетей требуют замены, не менее 15 % находятся в аварийном состоянии. На каждые 100 км тепловых сетей ежегодно регистрируются в среднем 70 повреждений. Потери тепла в тепловых сетях достигают 30 %, капитального ремонта или полной замены требуют 80 % общей протяженности сетей.
Основными причинами подобного состояния теплоснабжения являются:
- Износ оборудования и тепловых сетей;
- дефицит финансирования;
- Слабый контроль, управление и др.
Для решения накопившихся в последние десятилетия проблем, как в теплоснабжении, так и в других объектах жизнеобеспечения городской инфраструктуры, выполненных с возможностью перемещения, необходимо осуществление комплексных мер, среди которых важное место занимает система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры.
Известные системы дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры (авт. свид. СССР № 830.304, 911.464, 930.254, 1.075.426, 1.233.105, 1.276.594, 1.291.984, 1.522.417, 1.626.428, 1.663.784, 1.665.531, 1.780.080, 1.798.738; патенты РФ № 2.001.531, 2.013.018, 2.019.052, 2.156.551, 2.214.691, 2.215.370, 2.264.034, 2.286.026, 2.313.911, 2.329.608, 2.425.423, 2.435.228, 2.438.581, 2.447.598, 2.504.903, 2.509.373, 2.614.016, 2.656.972; патенты США №4.328.581, 5.038.136, 5.077.538, 5.499.760, 5.856.027, 6.128.476; патент Франции №2.438.877; патенты ЕР № 0.405.512, 0.486.830, 0.669.740; патенты WO № 96.10.309, 97.20.438 и др.).
Из известных систем и устройств наиболее близкой к предполагаемой является «Компьютерная система управления портовым контейнерным терминалом» (патент РФ №2.656.972 G08G1/123, 2017), которая выбрана в качестве базового объекта.
Известная система обеспечения подавления ложных сигналов (помех), принимаемых по перовому и второму зеркальным каналам на частотах  и
и  , по первому, второму, третьему и четвёртому комбинационным каналам на частотах
, по первому, второму, третьему и четвёртому комбинационным каналам на частотах  ,
,  ,
,  .
.
Однако кроме указанных дополнительных каналов существуют еще и каналы прямого прохождения на второй промежуточной частоте  и интермодуляционные каналы, которые образуются при появлении в свободном канале одновременно не менее двух ложных сигналов (помех), наложенных друг на друга.
и интермодуляционные каналы, которые образуются при появлении в свободном канале одновременно не менее двух ложных сигналов (помех), наложенных друг на друга.
Природу интермодуляционных помех можно пояснить следующим образом.
Если в эфире одновременно появляются два сигнала большой амплитуды с частотами, например,  и
и  , то они образуют на любых нелинейных элементах ряд интермодуляционных частот:
, то они образуют на любых нелинейных элементах ряд интермодуляционных частот: 
 =
=  .
.
Сумма (разность) коэффициентов m и n называется порядком, т.е. интермодуляционная частота  называется частотой порядка m
называется частотой порядка m  .
.
Как видно из фиг.4, два мощных ложных сигнала (помехи) образуют множество интермодуляционных частот.
Наличие ложных сигналов (помех), принимаемых по каналам прямого прохождения и интермодуляционным каналам, приводят к снижению избирательности, помехоустойчивости и надежности дуплексной радиосвязи между диспетчером геодезического пункта и объектами жизнеобеспечения городской инфраструктуры.
Технической задачей изобретения является повышение избирательности, помехоустойчивости и надежности дуплексной радиосвязи между диспетчерским геодезическим пунктом и объектами жизнеобеспечения городской инфраструктуры путем подавления ложных сигналов (помех), принимаемых по каналам прямого прохождения и интермодуляционном каналам.
Поставленная задача решается тем, что компьютерная система дистанционного контроля и управления объектами жизнедеятельности городской инфраструктуры, выполненных с возможностью перемещения, содержащая, в соответствии с ближайшим аналогом, диспетчерский геодезический пункт, на котором установлены приемник GPS-сигналов с антенной, предназначенный для приема навигационного сигнала, используемого для вычисления дифференциальных поправок, передающая радиостанция, предназначенная для передачи дифференциальных поправок на объекты жизнеобеспечения, и дуплексная радиостанция, на борту каждого объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, установлены дуплексная радиостанция, первый приемник с антенной, предназначенный для получения дифференциальных поправок с диспетчерского пункта, и второй приемник с антенной, предназначенный для приема навигационного GPS-сигнала, используемого для вычисления дифференциальных поправок, при этом между диспетчерским геодезическим пунктом и каждым объектом жизнеобеспечения установлены пейджинговая и двухсторонняя радиосвязи непосредственно и/или через систему приема и передачи информации, дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, содержит последовательно включенные компьютер, первый задающий генератор, первый фазовый манипулятор, второй вход которого через источник дискретного сообщения соединен с компьютером, первый амплитудный модулятор, второй вход которого через источник аналогового сообщения соединен с компьютером, первый смеситель, второй вход которого соединен с выходом первого гетеродина, первый усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной и второй усилитель мощности, последовательно включенных второй гетеродин, второй смеситель, первый усилитель второй промежуточной частоты, второй ключ, первый усилитель-ограничитель, первый синхронный детектор, второй вход которого соединен с выходом второго ключа, компьютер и первый блок регистрации, последовательно подключенных к выходу первого усилителя-ограничителя первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр и первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, последовательно подключение к выходу первого гетеродина первый колебательный контур, первый узкополосный фильтр, первый амплитудный детектор и второй пороговый блок, выход которых соединены со вторым входом второго ключа, передающая радиостанция содержит последовательно включенные второй задающий генератор, второй фазовый манипулятор, второй вход которого соединен с прибором дифференциальных поправок, подключенным к выходу приемника GPS-сигналов с антенной, третий усилитель мощности и передающую антенну, дуплексная радиостанция, размещенная на каждом объекте жизнеобеспечения содержит последовательно включенные микропроцессор, к которому подключены датчик номера объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, и датчик состояния объекта жизнеобеспечения, третий задающий генератор, третий фазовый манипулятор, второй амплитудный модулятор, второй вход которого соединен с микропроцессором, третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, четвертый усилитель мощности, второй дуплексер, вход-выход которого связан со второй приемопередающей антенной и пятый усилитель мощности, последовательно включенный четвертый гетеродин, четвертый смеситель, второй усилитель первой промежуточной частоты, третий ключ, второй усилитель-ограничитель, второй синхронный детектор, второй синхронный детектор, второй вход которого соединены с выходом третьего ключа, и микропроцессор, последовательно подключенных к выходу второго усилителя-ограничителя второй перемножитель, второй вход которого соединен с выходом четвертого гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к микропроцессору, последовательно подключенные к выходу третьего гетеродина второй колебательный контур, второй узкополосный фильтр, второй амплитудный детектор и третий пороговый блок, выход которого соединен со вторым входом третьего ключа, первый приемник, размещенный на каждом объекте жизнеобеспечения, содержит последовательно включенные вторую приемную антенну, усилитель высокой частоты, первую линию задержки, третий фазовый детектор, второй вход которого соединен с выходом усилителя высокой частоты, и блок определения местоположения объекта жизнеобеспечения, второй вход и выход которого подключены к микропроцессору дуплексной радиостанции, второй приемник с третьей приемной антенной, размещенный на каждом объекте жизнеобеспечения, подключен к микропроцессору дуплексной радиостанции, к выходу третьего задающего генератора последовательно подключены шестой усилитель мощности, третий дуплексер, вход-выход которого связан с третьей приемопередающей антенной, седьмой усилитель мощности, четвертый фазовый детектор, второй вход которого соединен с выходом третьего задающего генератора, коррелятор, вход которого соединен с микропроцессором, первый пороговый блок, первый ключ, второй вход которого соединен с выходом четвертого фазового детектора, вторая линия задержки, первый сумматор, второй и третий входы которого соединены со вторым выходом датчика номера объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, и микропроцессором соответственно, а выход подключен ко второму входу третьего фазового манипулятора, к выходу первого порогового блока подключены световой и звуковой маячки, к выходу первого ключа подключен второй блок регистрации, каждый контейнер, предназначенный для обнаружения объекта жизнеобеспечения городской инфраструктуры, снабжен радиочастотной меткой, выполненной с возможностью облучения ее считывателем, установленным на объекте жизнеобеспечения городской инфраструктуры, для отражения номера контейнера, выполненной в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем поверхностных акустических волн и набором отражателей, причем встречно-штыревой преобразователь состоит их двух гребенчатых систем электродов, нанесенных на поверхность пьезокристалла, электроды каждой из гребенок соединены друг с другом шинами, которые в свою очередь, соединены с микрополосковой приемопередающей антенной, изготовленной также на поверхности пьезокристалла, отличается от ближайшего аналога тем, что дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, снабжена вторым, третьим и четвертым сумматором, третьим узкополосным фильтром, третьим и четвертым полосовыми фильтрами и тремя фазоинверторами, причем к выходу второго усилителя мощности последовательно подключены третий узкополосный фильтр, первый фазоинвертор, второй сумматор, второй вход которого соединен с выходом второго усилителя мощности, третий полосовой фильтр, второй фазоинвертор, третий сумматор, второй вход которого соединен с выходом второго сумматора, четвертый полосовой фильтр, третий фазоинвертор и четвертый сумматор, второй вход которого соединен с выходом третьего сумматора, а выход подключен ко второму входу второго смесителя и первого колебательного контура, а дуплексная радиостанция, размещенная на каждом объектом жизнеобеспечения, снабжена пятыми, шестыми и седьмыми сумматорами, четвертым узкополосным фильтром, пятым и шестым полосовыми фильтрами, четвертым, пятым и шестым фазоинверторами, причем к выходу пятого усилителя мощности последовательно подключены четвертый узкополосный фильтр, четвертый фазоинвертор, пятый сумматор, второй вход которого соединен с выходом пятого усилителя мощности, пятый полосовой фильтр, пятый фазоинвертор, шестой сумматор, второй вход которого соединен с выходом пятого сумматора, шестой полосовой фильтр, шестой фазоинвертор, седьмой сумматор, второй вход которого соединен с выходом шестого сумматора, шестой полосовой фильтр, шестой фазоинвертор и седьмой сумматор, второй вход которого соединен с выходом шестого сумматора, а выход подключен ко второму входу четвертого смесителя и второго колебательного контура.
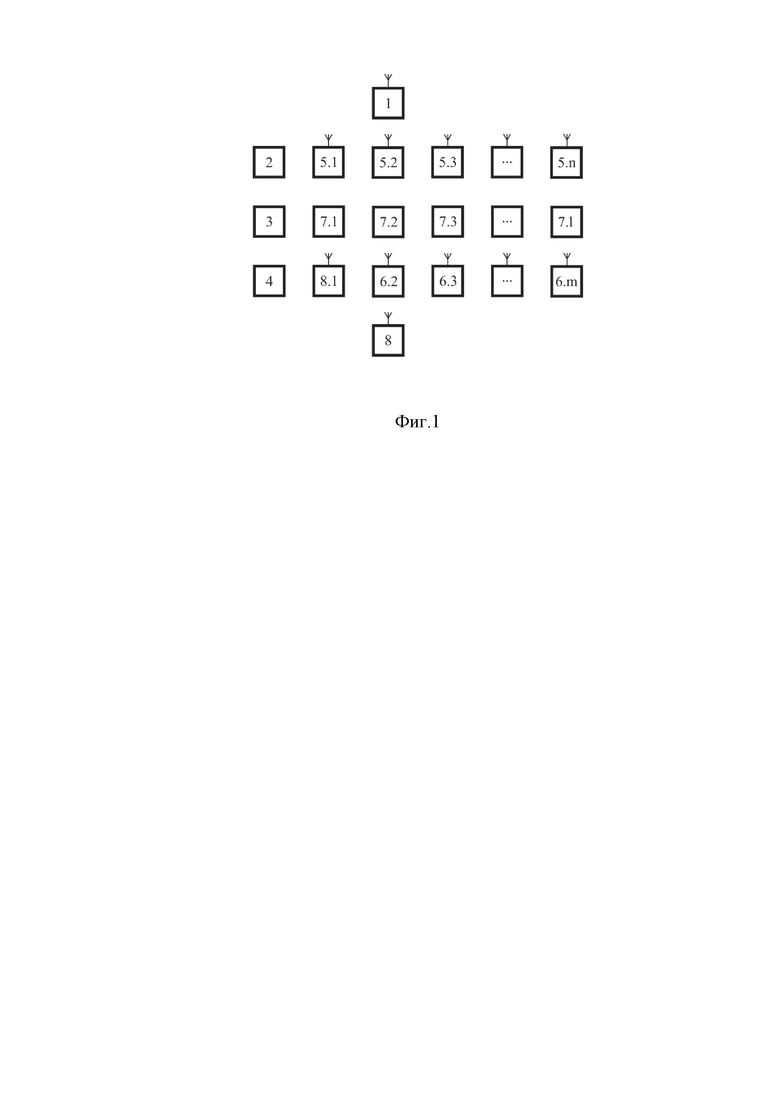
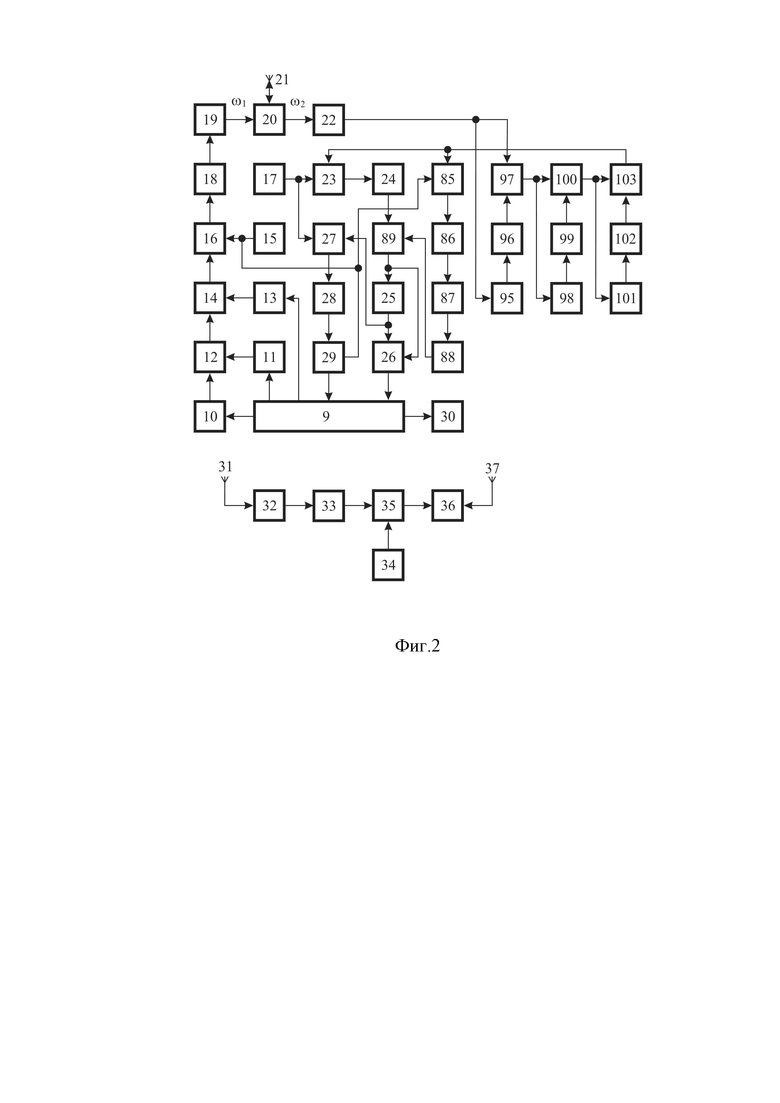
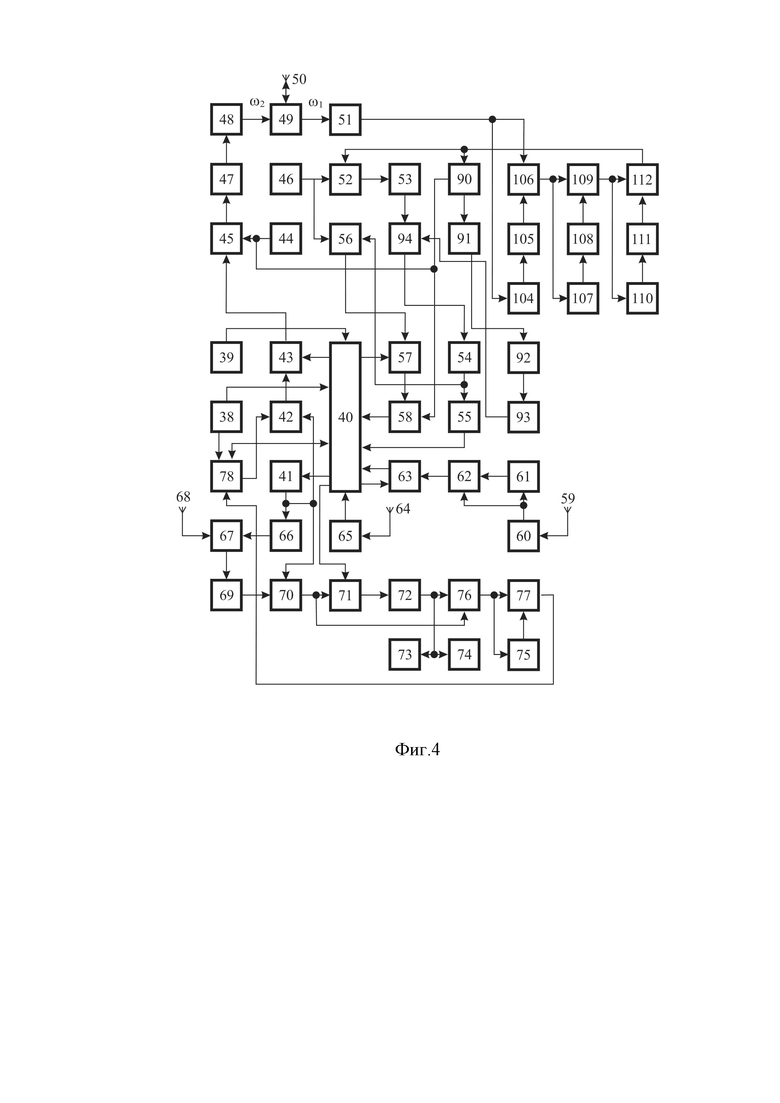
Структурная схема предлагаемой системы представлена на фиг.1. Структурные схемы дуплексной и передающей радиостанций, размещенных на диспетчерском геодезическом пункте, изображены на фиг.2. Частотные диаграммы, иллюстрирующие преобразование сигналов, показаны на фиг.3. Структурные схемы дуплексной радиостанции, двух приемников и считывателя, размещенных на каждом объекте жизнедеятельности, представлены на фиг.4. Функциональная схема радиочастотной метки изображена на фиг.5. Функциональная смеха фрагмента радиотелефонной системы общего пользования с сотовой структурой представлена на фиг.6. Геометрическая схема расположения геостационарного ИСЗ-ретранслятора S и двух других наземных пунктов А и В показана на фиг.7.
Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры, выполненными с возможностью перемещения, содержит диспетчерский геодезический пункт 1, на котором размещены дуплексная и передающие радиостанции, объекты 2 административного назначения, объекты 3 пожарной безопасности, объекты 4 специального назначения, объекты 5.i и 6.j коммунального хозяйства (i=1,2,…,n; j=1,2,…,m), устройства 7.l (l=1,2,…,L) для управления робототехническим комплексами и систему 8 приема и передачи информации. При этом на каждом объекте жизнеобеспечения размещены дуплексная радиостанция, два приемника и считыватель. Между диспетчером геодезического пункта 1 и объектами жизнеобеспечения установлена пейджинговая и двусторонняя радиосвязь непосредственно и (или) через систему 8 приема и передачи информации.
Дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит последовательно включенные компьютер 9, первый задающий генератор 10, первый фазовый манипулятор 12, второй вход которого через источник 11 дискретных сообщений соединен с компьютером 9, первый амплитудный модулятор 14, второй вход которого через источник 13 непрерывных сообщений соединен с компьютером 9, первый смеситель 16, второй вход которого соединен с выходом первого гетеродина 15, первый усилитель 18 первой промежуточной частоты, первый усилитель 19 мощности, первый дуплексер 20, вход-выход которого связан приемопередающей антенной 21, второй усилитель 22 мощности, третий узкополосный фильтр 95, первый фазоинвертор 96, второй сумматор 97, второй вход которого соединен с выходом второго усилителя 22 мощности, третий полосовой фильтр 98, второй фазоинвертор 99, третий сумматор 100, второй вход которого соединен с выходом второго сумматора 97, четвертый полосовой фильтр 101, третий фазоинвертор 102, четвертый сумматор 103, второй вход которого соединен с выходом третьего сумматора 100, второй смеситель 23, второй вход которого соединен с выходом второго гетеродина 17, первый усилитель 24 второй промежуточной частоты, второй ключ 89, первый усилитель-ограничитель 25,первый синхронных детектор 26, второй вход которого соединен с выходом второго ключа 89, компьютер 9 и первый юлок 30 регистрации. К выходу первого усилителя-ограничителя 25 последовательно подключены первый перемножитель 27, второй вход которого соединен с выходом второго гетеродина 17, первый полосовой фильтр 28 и первый фазовый детектор 29, второй вход которого соединен с выходом первого гетеродина 15, а выход подключен к компьютеру 9. К выходу третьего сумматора 103 последовательно подключены первый колебательный контур 85, второй выход которого соединен с выходом первого гетеродина 15, первый узкополосный фильтр 86, первый амплитудный детектор 87 и второй пороговый блок 88, выход которого соединен со вторым входом второго ключа 89.
Передающая радиостанция, размещенная на диспетчерском геодезическом пункте 1, содержит последовательно включенные второй задающий генератор 34, второй фазовый манипулятор 35, второй вход которого соединен с прибором 33 дифференциальных поправок, подключенным к выходу приемника 32 GPS-сигналов с антенной 31, третий усилитель 36 мощности и передающую антенну 37.
Дуплексная радиостанция, размещаемая на каждом объекте жизнеобеспечения, содержит последовательно включенные датчики 38 номера объекта жизнеобеспечения, микропроцессор 40, к которому подключен датчик 39 состояния объекта жизнеобеспечения, третий задающий генератор 41, третий фазовый манипулятор 42, второй амплитудный модулятор 43, ко второму входу которого подключен микропроцессор 40, третий смеситель 45, второй вход которого соединен с выходом третьего гетеродина 44, второй усилитель 47 второй промежуточной частоты, четвертый усилитель 48 мощности, второй дуплексер 49, вход-выход которого связан со второй приемопередающей антенной 50, пятый усилитель 51 мощности, четвёртый узкополосный фильтр 104, четвёртый фазоинвертор 105, пятый сумматор 106, второй вход которого соединен с выходом пятого усилителя 51 мощности, пятый полосовой фильтр 107, пятый фазоинвертор 108, шестой сумматор 109, второй вход которого соединен с выходом пятого сумматора 106, шестой полосовой фильтр 110, шестой фазоинвертор 111, седьмой сумматор 112, второй вход которого соединен с выходом шестого сумматора 109, четвертый смеситель 52, второй вход которого соединен с выходом четвертого гетеродина 46, второй усилитель 53 первой промежуточной частоты, третий ключ 94, второй усилитель-ограничитель 54, второй синхронный детектор 55, второй вход которого соединен с выходом третьего ключа 94, и микропроцессор 40. К выходу второго усилителя-ограничителя 54 последовательно подключены второй перемножитель 56, второй вход которого соединен с выходом четвертого гетеродина 46, второй полосовой фильтр 57 и второй фазовый детектор 58, второй вход которого соединен с выходом гетеродина 44, а выход подключен к микропроцессору 40.
К выходу седьмого сумматора 112 последовательно подключены второй колебательный контур 90, второй вход которого соединен с выходом третьего гетеродина 44, второй узкополосый фильтр 91, второй амплитудный детектор 92 и третий пороговый блок 93, выход которого соединен со вторым входом третьего ключа 94.
Первый приемник, размещенный на объекте жизнеобеспечения, содержит последовательно включенные вторую приемную антенну 59, усилитель 60 высокой частоты, первую линию защиты 61, третий фазовый детектор 62 и блок 63 определения местоположения объекта жизнеобеспечения, второй вход и выход которого соединены с микропроцессором 40.
Второй приемник 65 с третьей приемной антенной 64 обеспечивает прием навигационных GPS-сигналов и подключен к микропроцессору 40.
Считыватель, размещенный на объекте жизнеобеспечения, содержит последовательно подключенные к выходу третьего задающего генератора 41 шестой усилитель 66 мощности, третий дуплексер 67, вход-выход которого связан с третьей приемопередающей антенной 68, седьмой усилитель 69 мощности, четвертый фазовый детектор 70, второй вход которого соединен с выходом третьего задающего генератора 41, коррелятор 71, второй вход которого соединен с микропроцессором 40, первый пороговый блок 72, первый ключ 76, второй вход которого соединен с выходом фазового детектора 70, вторая линия задержки 77 и первый сумматор 78, второй и третий входы которого соединены со вторым выходом датчика 38 номера объекта жизнеобеспечения и микропроцессором 40 соответственно, а выход подключен ко второму входу третьего фазового манипулятора 42. К выходу порогового блока 72 подключены световой 73 и звуковой 74 маячки. К выходу ключа 76 подключен второй блок 75 регистрации.
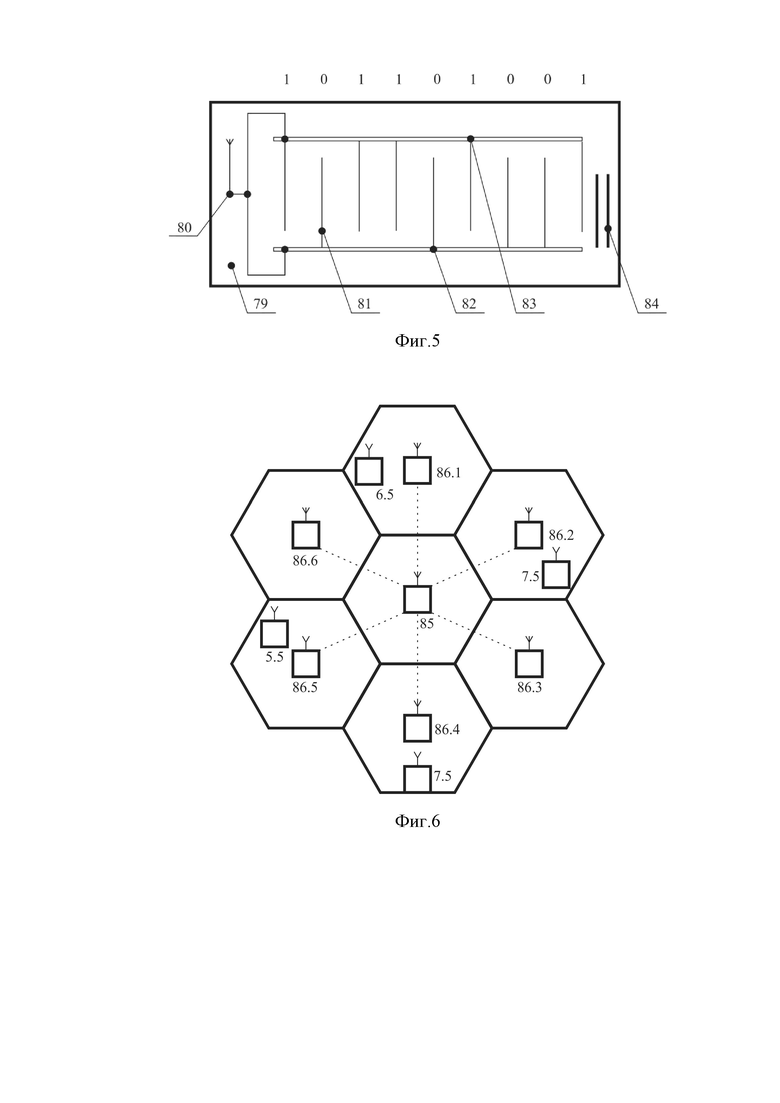
Каждый контейнер, предназначенный для обнаружения объектом жизнеобеспечения городской инфраструктуры, снабжен радиочастотной меткой, выполненной с возможностью облучения ее считывателем, установленным на объекте жизнеобеспечения городской инфраструктуры, для отражения номера контейнера, выполненной в виде пьезокристалла 79 с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем поверхностных акустических волн (ПАВ) и набором отражателей 84. Причем встречно-штыревой преобразователь ПАВ состоит из двух гребенчатых систем электропроводов 81, нанесенных на поверхность пьезокристалла 79, электроды 81 каждой из гребенок соединены друг с другом шинами 82 и 83, которые, в свою очередь, соединены с микрополосковой приемопередающей антенной 80, изготовленной также на поверхности пьезокристалла 79.
В качестве системы 8 приема и передачи информации может использоваться радиотелефонная система общего пользования с сотовой структурой, фрагмент которой изображен на фиг.6.
Территория населенного пункта и прилегающая к нему территория разделяются на ячейки (соты), в каждой их которых устанавливается базовая радиостанция 86к (к= 1, 2,…,К), которая связана радиоканалом с объектами жизнеобеспечения.
При этом передатчики указанных радиостанций имеют относительно небольшую мощность. Чтобы оптимально разделить определенную территорию на микрозоны без перекрытий и пропусков участков, могут быть использованы только три геометрические фигуры: треугольник, квадрат и шестиугольник.
Наиболее подходящей фигурой является шестиугольник, так как если антенну базовой радиостанции 86.к (к=1, 2,…,К) установить в его центре, то круговая форма диаграммы направленности будет покрывать почти всю его площадь. Все микрозоны (соты) связаны соединительными линиями с центральной радиостанцией 85, которая, в свою очередь, соединена с автоматической телефонной сетью (АТС), а через нее и с диспетчерским геодезическим пунктом 1. В качестве соединительных линий могут использоваться кабели и радиорелейные линии. Расчет и практика использования сотовых систем связи показывают, что радиусы зон ячеек могут быть в пределах от 2 до 10 км.
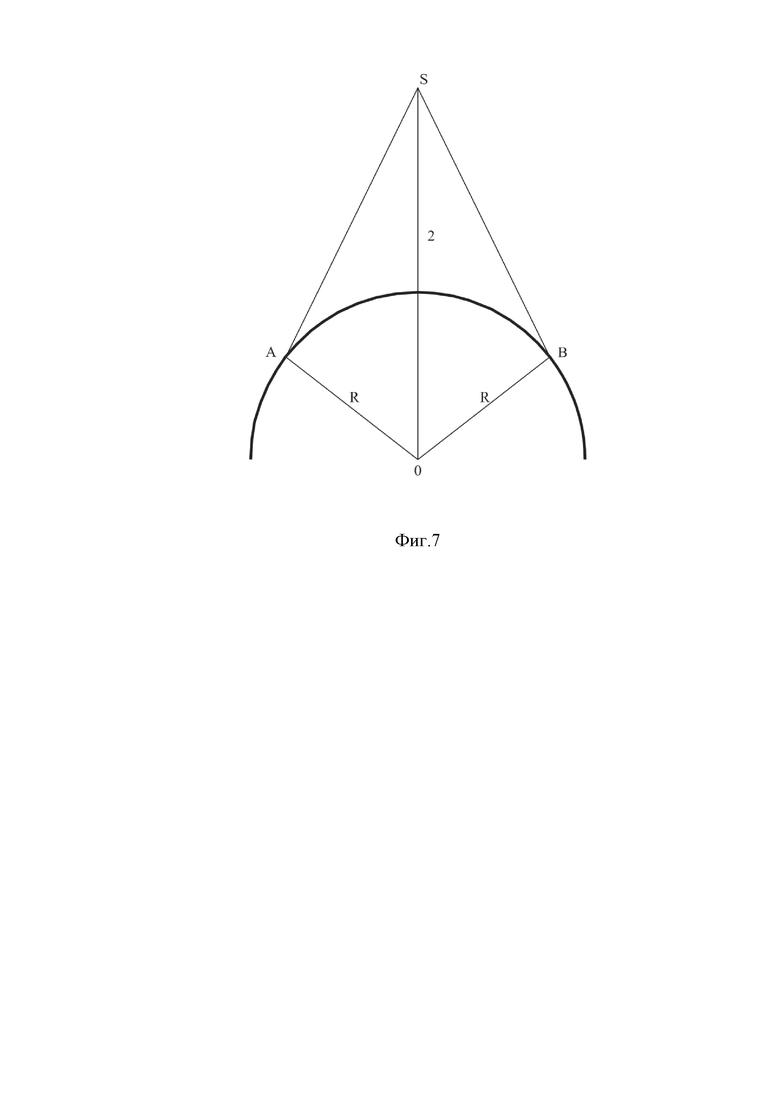
В качестве системы 8 приема и передачи информации может использоваться и спутниковая система связи (фиг.7). При этом искусственные спутники Земли могут размещаться на низких или высоких (геостационарных) орбитах.
Следовательно, в состав предлагаемой системы входят космический сегмент, состоящий из 24 КА, сеть наземных станций наблюдения за их работой и приемники GPS-сигналов, установленные на диспетчерском геодезическом пункте 1, на объектах жизнеобеспечения. Приемники GPS-сигналов позволяют определять координаты объектов жизнеобеспечения (широту и долготу), скорость их движения и точное время.
Каждый GPS-спутник излучает на двух частотах (ω1=1757 МГц и ω11=12,275 МГц) специальный навигационный сигнал в виде бинарного фазоманипулированного (ФМн) сигнала, манипулированного по фазе псевдослучайной последовательностью. В сигнале зашифровываются два вида кодов. Один из них – код С/А – доступен широкому кругу гражданских потребителей, в том числе и предлагаемой системе. Он помогает получать лишь приблизительную оценку местоположения объектов жизнеобеспечения, выполненных с возможностью перемещения, поэтому называется «грубым» кодом. Передача кода С/А осуществляется на частоте ω1=1575 МГц с использованием фазовой манипуляцией псевдослучайной последовательностью длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А- кода – 1мс. Тактовая частота – 1,023 МГц.
Другой код - P - обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS, используется военным ведомством США.
Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры, выполненной с возможностью перемещения, функционирует следующим образом.
С целью передачи необходимой информации на избранный объект жизнеобеспечения на диспетчерском геодезическом пункте 1 с помощью компьютера 9 включается генератор 10, который формирует высокочастотный сигнал,
u 1(t)=Uc˟Cos(ωct+φc), 0≤t≤Tc,
где Uc, ωc ϕc, Tc – амплитуда, несущая частота, начальная фаза и длительность сигнала.
Данный сигнал с выхода задающего генератора 10 поступает на первый вход фазового манипулятора 12, на второй вход которого подается модулирующий код М1(t) с выхода источника 11 дискретных сообщений. На выходе фазового манипулятора 12 образуется фазоманипулированный (ФМн) сигнал
u 1(t)=U1˟Cos[ωct+φк1(t)+ φc], 0≤t≤Tc ,
где φк1(t)={0, π} – манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М1(t), причем φк1(t)=const при К*τэ<t<(k+1)τэ и может изменяться скачком при t=K*τэ, т.е. на границах между элементарными посылками (К=1, 2,…, N-1);
τ э, N- длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс= τэ˟N).
Этот сигнал поступает на первый вход амплитудного модулятора 14, на второй вход подается модулирующая функция m1(t) с выхода источника 13 аналоговых сообщений. На выходе амплитудного модулятора 14 образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМн – АМ)
u 2(t)=Uс[1+m1(t)]˟Cos[ωct+φк1(t)+φc], 0≤t≤Tc ,
где m1(t) – модулирующая функция, отображающая закон амплитудной модуляции. Работа источников дискретных 11 и аналоговых 13 сообщений синхронизируется компьютером 9.
Сформированный сигнал U2(t) поступает на первый вход первого смесителя 16, на второй вход которого подается напряжение первого гетеродина 15
u г1=Uг1˟Cos(ωг1t+φг1).
На выходе смесителя 16 образуется напряжения комбинационных частот. Усилителем 18 выделяется напряжение первой промежуточной (суммарной) частоты
u up1(t)= Uпр1[1 + m1(t)] ˟Cos[ωпр1t+φк1(t)+ φпр1], 0≤t≤Tc ,
U пр1 = ½ Uc ˟Ur1,
где ωпр1 = ωc + ωг1=ω1 – первая промежуточная частота;
φ пр1 = φc + φг1,
которое после усиления в усилителе 19 мощности через дуплексер 20 поступает в приемопередающую антенну 21, излучается ею на частоте ω1 в эфир (в направлении населенного пункта), улавливается приемопередающей антенной 50 объекты жизнеобеспечения и через дуплексер 49, усилитель 51 мощности и сумматоры 106, 109 и 112, у которых работает только одно плечо, поступает на первый вход смесителя 52, на второй вход которого подается напряжение гетеродина 46
U г1(t)= Uг1˟Cos(ωг1t+ φг1).
На входе смесителя 52 образуются напряжения комбинационных частот. Усилителем 53 выделяется напряжение второй промежуточной (разностной) частоты
u пр2(t) = Uпр2[1 + m1(t)] ˟Cos[ωпр2t +φк1(t) + φпр2], 0≤t≤Tc ,
U пр2 = ½Uпр1 ˟Uг1
где ωпр2= ωпр1- ωг1– вторая промежуточная (суммарная) частота;
φ пр2 = φпр1 - φг1
Принимаемый сигнал uпр1(t) на частоте ω1 с выхода пятого усилителя 51 мощности одновременно поступает на первый ход второго колебательного контура 90, на второй вход которого подается напряжение ur2(t) третьего гетеродина 44, так как частота ω1 принимаемого сигнала выбирается равной частоте ωг2 третьего гетеродина 44(ω1=ωг2) (фиг.3), то в колебательном контуре возникает явление резонанса, выходное напряжение колебательного контура 90 достигает максимального значения, выделяется вторым узкополосным фильтром 91, частота настройки которого выбирается равной ωн1=ω1=ωr2, детектируется вторым амплитудным детектором 92 и поступает на вход третьего порогового блока 93, где сравнивается с пороговым напряжением Uпор1. Пороговый уровень Uпор1 превышается только при максимальном напряжении Umax амплитудного детектора 92, которое соответствует явлению резонанса. При превышении порогового уровня Uпор1(Umax > Uпор1) в пороговом блоке 93 формируется постоянное напряжение, которое поступает на управляющий вход первого ключа 94 и открывает его. В исходном состоянии третий ключ 94 всегда закрыт. При этом напряжение Uпр2(t) второй промежуточной частоты с выхода усилителя 53 через открытый ключ 94 поступает на вход второго усилителя-ограничителя 54, на выходе которого образуется напряжение
u 3(t) = U0˟Cos[ωпр2t +φк1(t)+φпр2], 0≤t≤Tc ,
где U0 - порог ограничения усилителя-ограничителя 54, которое представляет собой ФМн-сигнал, используемый в качестве опорного напряжения и поступает на второй (опорный) вход синхронного детектора 55. На первый (информационный) вход синхронного детектора 55 подается напряжение Uпр2(t) с выхода третьего ключа 94. На выходе синхронного детектора 55 образуется низкочастотное напряжение
u н1(t) = Uн1[1+m1(t)],
где Uн1=½Uпр2˟U0, пропорциональное модулирующей функции m1(t). Это напряжение поступает в микропроцессор 40.
Напряжение u3(t) с выхода усилителя-ограничителя 54 одновременно поступает на первый вход перемножителя 56, на второй вход которого подается напряжение uг1(t) с выхода гетеродина 46. На выходе перемножителя 56 образуется напряжение
u 4(t)=U4˟Cos(ωг2t+φк1(t) +φг2), 0≤t≤Tc ,
U 4= ½U0˟ Uг1,
где ωг2=ωпр2+ωг1
φ г2=φпр2+φr1,
которое представляет собой ФМн-сигнал на частоте ωг2 гетеродина 44. Это напряжение выделяется полосовым фильтром 57 и поступает на первый (информационный) вход фазового детектора 58, на второй (опорный) вход которого подается напряжение гетеродина 44
u г2(t)=Uг2˟Cos(ωг2t + φг2),
На выходе фазового детектора 58 образуется низкочастотное напряжение
u н2(t)=Uн2˟Cosφk1(t),
где Uн2=½U4 ˟Uг2 , пропорциональное модулирующему коду М1(t). Это напряжение поступает в микропроцессор 40.
Частоты ωг1 и ωг2 гетеродинов разнесены на значение второй промежуточной частоты (фиг.3)
ω г2 - ωг1=ωпр2.
Следовательно, в дискретных и аналоговых сообщениях, предаваемых с диспетчерского геодезического пункта 1 на выбранный объект жизнеобеспечения, содержится вся необходимая информация водителю и/или водителя о номерах контейнеров, их местоположении, порядке действий и т.п.
Скорость обновления навигационных параметров - 1с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения объекта жизнеобеспечения.
Определение навигационных параметров может производиться в двух режимах – 2D(двухмерном) и 3D(пространственном). В режиме 2D устанавливается широта и долгота. Для этого достаточно присутствия в зоне радиовидимости трех спутников. Точность определения местоположения объекта – 15-20 м.
Один из основных методов повешения точности определения местонахождения объекта и устранения ошибок, связанных с введением режима селективного доступа, основан на применении известного в радионавигации принципа дифференциальных навигационных измерений.
Дифференциальный режим позволяет установить координаты объекта жизнеобеспечения с точностью до 5 м в динамической навигационной обстановке и до 2 м в стационарных условиях.
Дифференциальный режим реализуется с помощью приемника 32 GPS- сигналов, размещенного на диспетчерском геодезическом пункте 1. Приемник 32 GPS - сигналов является многоканальным, каждый канал отслеживает один видимый спутник. Необходимость непрерывного отслеживания каждого КА обусловлена тем, что указанный приемник должен «захватывать» навигационные сообщения раньше, чем приемники объектов. Сравнивая известные координаты, полученные в результате прецизионной геодизической съемки, с измеренными, прибор 33 вырабатывает дифференциальные поправки, которые передаются объектами по радиоканалу с помощью задающего генератора 34, фазового манипулятора 35, усилителя 36 мощности и передающего антенне 37 в заранее оговоренном формате.
Аппаратура объекта жизнеобеспечения включает в себя первый приемник, который и позволяет получать дифференциальные поправки с диспетчерского геодезического пункта 1. Поправки, принятые с пункта 1, автоматически вносятся в результаты собственных измерений вторым приемником объекта жизнеобеспечения.
Для каждого КА, сигналы которого поступают на приемную антенну 64, поправка, полученная от пункта 1, складывается с результатом измерения псевдодальности. Для точного определения местоположения объектов жизнеобеспечения на диспетчерском геодезическом пункте 1, задающим генератором 34 формируется высокочастотный сигнал
u c1(t)=uc1×Cos(ωc1+φc1), 0≤t≤Tc
который поступает на первый вход фазового манипулятора 35, на второй вход которого с выхода прибора 33 дифференциальных поправок поступает модулирующий код M2(t), содержащий соответствующие поправки к определению местоположения выбранного объекта жизнеобеспечения. На выходе фазового манипулятора 35 образуется ФМн-сигнал
u 5(t)=u5×Cos(ωc1t+φk2(t)+φc1), 0≤t≤Tc1,
где φk2 (t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M2(t), который после усиления в усилителе 36 мощности поступает в приемную антенну 37, излучая ею в эфир, улавливается приемной антенной 59 и через усилитель 60 высокой частоты поступает на два входа фазового детектора 62 непосредственно и через линию задержки 61, время задержки tз1 которой выбирается равным длительности tэ элементарных посылок (tз1= tэ)
u 6(t)=u5(t-tз1)=U5×Cos[ωc1(t-tз1)+φk2(t-tз1)+φc1].
На выходе фазового детектора 62 образуется низкочастотное напряжение
u H3(t)=UH3×Cosφk2(t), 0≤t≤Tc1,
где UH3=½Uз2,
которое поступает на первый вход блока 63 определения местоположения объекта жизнеобеспечения.
Для точного определения местоположения объекта жизнеобеспечения используется и второй приемник 65 с приемной антенной 64, размещенный на его борту, который последовательно захватывает и обрабатывает С/А-сигналы спутниковой системы «Навстар» («Глонасс»). При этом данный приемник попеременно использует два основных режима работы – приема информации и навигационный. В навигационном режиме каждую секунду уточняется местоположение объекта жизнеобеспечения и выдаются основные навигационные данные. В режиме приема информации принимаются данные эфемерид и поправок времени, необходимые для навигационного режима, и производятся более редкие (через одну минуту) навигационные измерения.
Микропроцессор 40 выполняет две основные функции: обслуживает второй приемник 65 и производит навигационные расчеты. Первая заключается в выборе рабочего созвездия спутников, вычислении данных целеуказания и управлении работой второго приемника, например переключение из режима приема информации в навигационный режим и обратно. Вторая функция микропроцессора 40 состоит в расчете эфемерид, определении координат местоположения объекта жизнеобеспечения и выдаче для отображения на дисплее, который входит в состав блока 63 определения местоположения объекта жизнеобеспечения.
При получении информации с диспетчерского геодезического пункта 1 о номерах и местоположении контейнеров, предназначенных для обнаружения объекта жизнеобеспечения городской инфраструктуры, снабженных радиочастотной меткой, выполненной с возможностью облучения ее считывателем, для отражения его номера, при прибытии в заданный район и включает считыватель. При этом задающий генератор 41 формирует высокочастотный сигнал.
u c(t)=Uc×Cos(ωct+φc), 0≤t≤Tc,
который поступает на первый вход фазового манипулятора 42 через усилитель 66 мощности и дуплексер 67 поступает в рупорную приемопередающую антенну 68, излучается ею в эфир и облучает ближайший контейнер, снабженный радиочастотной меткой, находящийся на объекте жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения.
Высокочастотный сигнал uc(t) на частоте ωc улавливается микрополосковой антенной 80, настроенной на частоту ωc, преобразуется встречно-штыревым преобразователем в акустическую волну, которая распространяется по поверхности пьезокристалла 79, отражается от набора отражателей 84 и опять преобразуется в сложный сигнал с фазовой манипуляцией (ФМН)
u 7(t)=Uc×Cos[ωct+φкз(t)+φc], 0≤t≤Tc,
где φкз(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M3(1), отображающим идентификационный номер контейнера, и определяется топологией встречно-штыревого преобразователя.
В качестве примера на фиг.5 изображен модулирующий код M3=101101001.
Сформированный сложный ФМн - сигнал U7(t) излучается микрополосковой антенной 80 в эфир, улавливается рупорной приемопередающей антенной 68 и через дуплексер 67 и усилитель 69 мощности поступает на первый (информационный) вход фазового детектора 70. На второй (опорный) вход фазового детектора 70 в качестве опорного напряжения подается высокочастотный сигнал Uc(t) с выхода задающего генератора 41. На выходе фазового детектора 70 образуется низкочастотное напряжение
u H4(t)= UH4×Cos [φкз(t)+φc], 0≤t≤Tc
где UH4=1/2Uс2,
пропорциональное модулирующему коду M3(t).
Это напряжение поступает на первый вход коррелятора 71, на второй вход которого подаются модулирующие коды, отражающие номера запрашиваемых контейнеров. Если модулирующие коды совпадают, то на выходе коррелятора 71 формируется максимальное напряжение Umax, которое превышает пороговое напряжение Unop в пороговом блоке 72(Umax>Unop). При превышении порогового уровня Unop в пороговом блоке 72 формируется постоянное напряжение, которое поступает на управляющий вход ключа 76, открывая его, на световой 73 и звуковой 74 маячки, заставляя их работать. В исходном состоянии ключ 76 всегда закрыт. Световой и звуковой сигналы свидетельствуют об обнаружении необходимого контейнера, номер которого регистрируется блоком 75 регистрации. Одновременно низкочастотное напряжение uH4(t), пропорциональное модулирующему коду M3(t), с выхода фазового детектора 70 через открытый ключ 76 поступает на вход линии задержки, где задерживается на время tз2, равное длительности номера объекта жизнеобеспечения и его местоположения, и поступает на первый вход сумматора 78. На второй вход последнего подается номер объекта жизнеобеспечения со второго выхода датчика 38. На третий вход сумматора 78 подается код местоположения объекта жизнеобеспечения из микропроцессора 40. На выходе сумматора 78 образуется суммарный модулирующий код MΣ(t) состоящий из модулирующего кода M3(t), номера M4(t) объекта жизнеобеспечения и его местоположения M5(t)
M Σ(t)=M3(t)+M4(t)+M5(t), длительностью tз2.
Модулирующий код MΣ(t) с выхода сумматора 78, коды номера объекта жизнеобеспечения и его состояния вместе с информацией о местоположении, текущем времени и найденных контейнерах, соответствующих обнаруженных объектов жизнеобеспечения, передаются на диспетчерский геодезический пункт 1. Для этого используют датчик 38 номера объекта жизнеобеспечения, датчик 39 объекта жизнеобеспечения, блок 63 определения местоположения объекта жизнеобеспечения, микропроцессор 40, задающий генератор 41, фазовый манипулятор 42 и амплитудный модулятор 43. На выходе последнего образуется сложный сигнал с комбинированной фазовой манипуляцией и амплитудной модуляцией (ФМН-АМ)
u 8(t)=Uc[1+m2(t)]×Cos[ωct+φk4(t)+φc], 0≤t≤Tc,
который поступает на первый вход смесителя 45, на второй вход которого подается напряжение гетеродина 44
U г2(t)=Uг2×Cos(ωг2(t)+φг2).
На выходе смесителя 45 образуются напряжения комбинационных частот, усилителем 47 выделяется напряжение третьей промежуточной (разностной) частоты
u пp3(t)=Uпp3[1+m2(t)]×Cos[ωпp3t-φk4(t)+φпp3], 0≤t≤Tc
U пp3(t)=1/2Uc×Ur2,
где ωпp3=ωг2-ωc - третья промежуточная (разностная) частота;
φ пp3=φг2-φc ,
которое после усиления в усилителе 48 мощности через дуплексер 49 поступает в приемопередающую антенну 50, излучается ею в эфир на частоте ω2=ωnp3=ωг1, улавливается приемопередающей антенной 21 диспетчерского геодезического пункта 1 и через дуплексер 20 и усилитель 22 мощности и сумматоры 97, 100 и 103, у которых работает только одно плечо, поступает на первый вход смесителя 23, на второй вход которого подается напряжение гетеродина 17
u г2(t)=Uг2×Cos(ωг2t+φг2).
На выходе смесителя 23 образуются напряжения комбинационных частот. Усилителем 24 выделяется напряжение второй промежуточной (разностной) частоты
u пp4(t)=Uпp4[1+m2t] ×Cos[ωпp2t+φk4(t)+φпp2], 0≤t≤Tc,
U пp4=1/2Uпp3×Uг2,
где ωпp2=ωг2-ωпp3 - вторая промежуточная (разностная) частота;
φ пp3=φг2-φпp3.
Принимаемый сигнал uпp3(t) на частоте ω2 с выхода второго усилителя 22 мощности одновременно поступает на первый вход первого колебательного контура 85, на второй вход которого подается напряжение uг1(t) гетеродина 15. Так как частота ω2 принимаемого сигнала выбирается равной частоте ωг1 первого гетеродина (ω2=ωг1)(фиг.3), то в колебательном контуре возникает явление резонанса, выходное напряжение колебательного контура 85 достигает максимального значения Umax, выделяется первым узкополосным фильтром 86, частота настройки которого выбирается равной
ω H2=ω2=ωг1,
детектируется первым амплитудным детектором 87 и поступает на вход второго порогового блока 88, где сравнивается с пороговым напряжением Uпop1.
Пороговый уровень Uпop1 превышается только при максимальном напряжении Umax1 амплитудного детектора 87, которое соответствует явлению резонанса. При превышении порогового уровня Uпop1(Umax> Uпop1) в пороговом блоке 88 формируется постоянное напряжение, которое поступает на управляющий вход второго ключа 89 и открывает его. В исходном состоянии второй ключ 89 всегда закрыт. При этом напряжение unp1(t) второй промежуточной частоты с выхода первого усилителя 24 второй промежуточной частоты через открытый ключ 89 поступает на вход второго усилителя-ограничителя 25, на выходе которого образуется напряжение
u 9(t)=U0×Cos[ωпp2t+φk4(t)+φпp2], 0≤t≤Tc,
где U0– порог ограничения,
которое поступает на второй (опорный) вход синхронного детектора 26, на первый (информационный) вход которого подается напряжение uпp4(t) с выхода ключа 89. На выходе синхронного детектора 26 образуется низкочастотное напряжение
u H5(t)=UH5×[1+m2(t)],
где UH5=1/2Uпp4×U0,
Пропорциональное модулирующей функции m2(t). Это напряжение поступает в компьютер 9 и затем может регистрироваться блоком 30 регистрации.
Напряжение u9(t) с выхода усилителя-ограничителя 25 одновременно поступает на первый вход перемножителя 27, на второй вход которого подается напряжение uг2(t) с выхода гетеродина 17. На выходе перемножителя 27 образуется напряжение
u 10(t)=U10×Cos[ωг1t+φk4(t)+φг1], 0≤t≤Tc,
U 10=1/2U0×Uг2,
где ωг1=ωг2-ωпp2=ωпp1-ωпp2=ωпp3;
φ г1=φг2-φпp2,
которое выделяется полосовым фильтром 28 и поступает на первый (информационный) вход фазового детектора 29, на второй (опорный) вход которого подается напряжение гетеродина 15
На выходе фазового детектора 29 образуется низкочастотное напряжение
u H6(t)=UH6Cosφk4(t),
где UH6=1/2U10×Uг1,
пропорциональное модулирующему коду MΣ(t). Это напряжение поступает в компьютер 9, а затем может регистрироваться блоком 30 регистрации. В качестве блока 30 регистрации может использоваться монитор компьютера 9 с изображением электронной карты объектов жизнеобеспечения. На указанную карту выводится информация о техническом состоянии объектов жизнеобеспечения.
Описанная выше работа предлагаемой системы соответствует случаю, когда диспетчерский геодезический пункт 1 находится на незначительном расстоянии от объектов жизнеобеспечения.
При использовании радиотелефонной системы общего пользования с сотовой структурой (фиг.6) информация с диспетчерского геодезического пункта 1 по телефонной сети поступает на центральную радиостанцию 85, а затем по соединительной линии на базовую радиостанцию 86.к (к = 1,2,…,К) той микрозоны (соты), где находится вызываемый объект жизнеобеспечения. Базовая радиостанция излучает сигнал, который принимается приемником дуплексной радиостанции, размещенной на объекте жизнеобеспечения. Объект жизнеобеспечения указанной радиостанции излучает сигнал, содержащий ответную информацию, который принимается базовой радиостанцией той микрозоны (соты), где появляется или находится объект жизнеобеспечения. От базовой радиостанции данный сигнал поступает на центральную радиостанцию, а затем через АТС на диспетчерский пункт 1, где фиксируется номер объекта жизнеобеспечения, передаваемая информация и географические координаты его местоположения.
В качестве системы 8 приема и передачи информации может использоваться спутниковая система связи (фиг.7). При этом диаграмма направленности бортовой антенны геостационарного ИСЗ-ретранслятора S выбирается так, чтобы ретранслированный сигнал мог быть принят в обоих наземных пунктах A и B. На наземном пункте А может располагаться диспетчерский геодезический пункт, а в пункте В - объект жизнеобеспечения городской инфраструктуры.
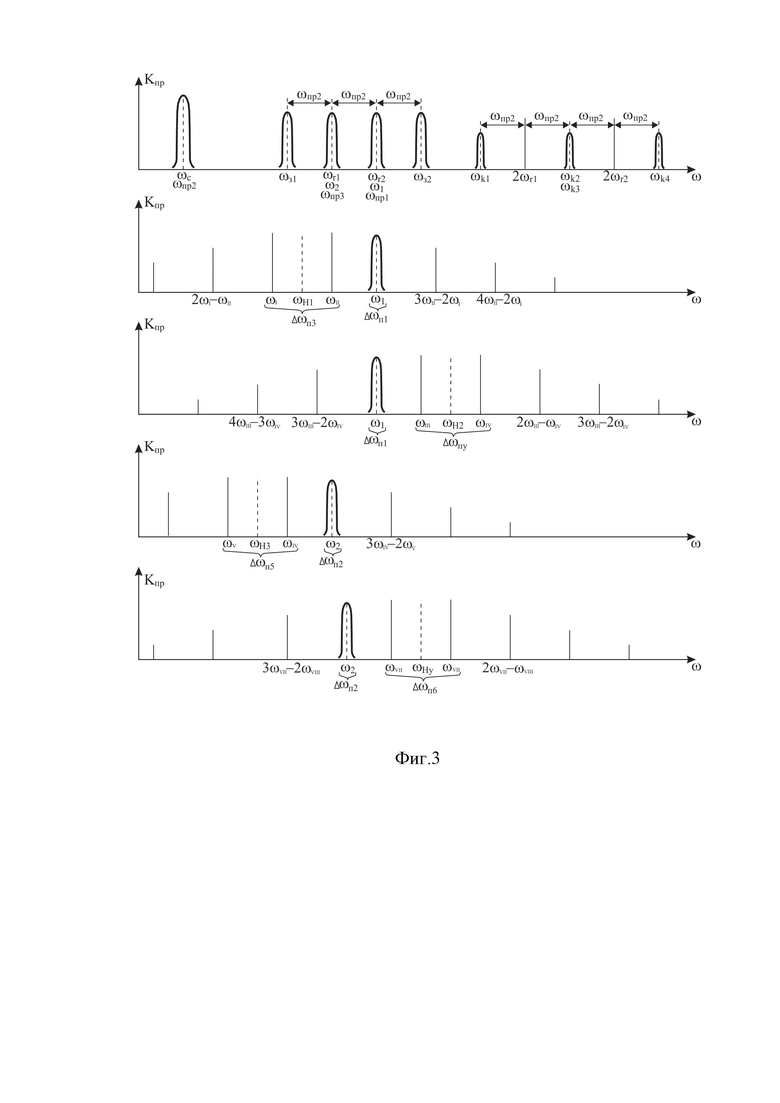
Описанная выше работа дуплексной радиостанции соответствует случаю приема полезных сигналов по основным каналам на частоте ω1 и ω2 (фиг.3).
Если ложный сигнал (помеха)
u з1(t)=Uз1×Cos(ωз1t+φз1), 0≤t≤Tз1,
принимается по первому зеркальному каналу на частоте ωз, то он также поступает с выхода пятого усилителя 51 мощности на первый вход четвертого смесителя 52 и на первый вход второго колебательного контура 90, на второй вход которого подается напряжение ur2(t) третьего гетеродина 44. Так как частоты ωз1 и ωг2 разнесены на удвоение значение второй промежуточной частоты
ω г2 - ωз1= 2ωпр2,
то в колебательном контуре явление резонанса не наблюдается, его выходное напряжение не достигает максимального напряжения, продетектированное напряжение U не превышает порогового напряжения Uпор1(U<Uпор1), третий ключ 94 не открывается и ложный сигнал (помеха) uз1(t), принимаемый по первому зеркальному каналу на частоте ωз1, подавляется.
Если ложный сигнал (помеха)
u з2(t)= Uз2×Cos(ωз2t+ Uз2), 0≤t≤Tз2,
принимается по второму зеркальному каналу на частоте ωз2, то он также с выхода второго усилителя 22 мощность поступает на первый вход второго смесителя 23 и на первый вход первого колебательного контура 85, на второй вход которого подается напряжение uг1(t) первого гетеродина 15. Так как частоты ωз2 и ωг1 разнесены на удвоенное значение второй промежуточной частоты
ω з2 - ωг1= 2ωпр2,
то в колебательном контуре 85 явление резонанса не наблюдается, его выходное напряжение не достигает максимального значения, продетектированное напряжение U не превышает порогового Uпор1(U<Uпор1), второй ключ 89 не открывается и ложный сигнал (помеха), принимаемый по второму зеркальному каналу на частоте ωз2, подавляется.
По аналогичной причине подавляются и ложные сигналы (помехи), принимаемые по первому комбинационному каналу на частоте ωк1, по второму комбинационному каналу на частоте ωк2 и по любому другому комбинационному каналу.
Если ложный сигнал (помеха) принимается по каналу прямого прохождения на частоте ωпр2:
u п1(t)= Uп1×Cos(ωп1t+φп1), 0≤t≤Tп1,
где ωп1= ωпр2,
то он с выхода усилителя 51 мощности поступает на первый вход сумматора 106, выделяется узкополостным фильтром 104, частота настройки ωH которой выбирается равной ωпр2(ωH=ωпр2), и поступает на вход фазоинвертора 105, где инвертируется по фазе на 180°
u п2(t)= -Uп1×Cos(ωп1t+φп1), 0≤t≤Tп1,
и подается на второй вход сумматора 106.
Напряжение uп1(t) и uп2(t), поступающее на два входа сумматора 106, на его выходе компенсируются.
Следовательно, ложный сигнал (помеха), принимаемый по каналу прямого прохождения на частоте ωп1, подавляющийся с помощью фильтра-пробки, состоящего из узкополосного фильтра 104, фазоинвертора 105, сумматора 106 и реализующего фазокомпенсационный метод.
Подавление ложных сигналов (помех), принимаемых по интермодуляционным каналам в полосе частотой △ωп3, расположенной «слева» от полосы пропускания △ωп1 приемника, обеспечивающийся фильтром - пробкой, состоящем из полосового фильтра 107, фазоинвертора 108, сумматора 109 и реализующим фазокомпенсационной метод. Частота настройки  и полоса △ωп3 полосового фильтра 107 выбираются следующим образом:
и полоса △ωп3 полосового фильтра 107 выбираются следующим образом:
ω н1= (ωI + ωII)/2; △ωп3= ωII - ωI,
где ωI, ωII – граничные частоты, определяющих полосу частот △ωп3, попадание в которую двух или более сигналов приводит к образованию интермодуляционных помех.
Указанные ложные сигналы (помехи) поступают на первый вход сумматора 109, выделяются полосовым фильтром 107, инвертируются по фазе на 180 в фазоинверторе 108 и подаются на второй вход сумматора 109, на выходе которого они компенсируются.
Следовательно, ложные сигналы (помехи), принимаемые по интермодуляционным каналам в полосе частоты △ωп3 подавляются.
Подавление ложных сигналов (помех) принимаемых по интермодуляционным каналам в полосе частоты △ωп4, расположенной «справа» от полосы пропускания △ωп1 приемника, обеспечивающийся фильтром-пробкой, состоящим из полосового фильтра 110, фазоинвертора 111, сумматора 112 и реализующим фотокомпенсационный метод.
Частота настройки  и полоса пропускания △ωп4 полосового фильтра 110 выбираются следующим образом:
и полоса пропускания △ωп4 полосового фильтра 110 выбираются следующим образом:
ω н2= (ωIII + ωIV)/2; △ωп4= ωIV – ωIII,
где ωIII, ωIV – граничные частоты, определяющие полосы частот △ωп4, попадание в которую двух и более сигналов, приводящих к образованию интермодуляционных помех.
Указанные ложные сигналы (помехи), поступают на первый вход сумматора 112, выделяются полосовым фильтром 110, инвертирующихся по фазе на +1800 в фазоинверторе 111 и подаются на второй вход сумматора 112, на выход которого они компенсируются.
Следовательно, ложные сигналы (помехи), принимаемые по интермодуляционным каналам в полосе частот △ωп4, подавляются.
Подавление ложных сигналов (помех), принимаемых по каналу прямого прохождения, по интермодуляционным каналам в полосе частотой △ωп5 и △ωп6, обеспечивается фильтрами-пробками, состоящими из узкополосного фильтра 95, фазоинвертора 96 и сумматора 97, из полосового фильтра 98, фазоинвертора 99 и сумматора 100, из полосового фильтра 101, фазоинвертора 102 и сумматора 103, работа которых происходит аналогично тому, как это описано выше.
Предлагаемая система обеспечивает повышение эффективности и расширение функциональных возможностей управления городской инфраструктурой. Это достигается путем снабжения каждого контейнера, предназначенного для обнаружения объекта жизнеобеспечения городской инфраструктуры, диосчастотными метками на поверхностных акустических волнах. Таким образом, каждый объект снабжен считывателем, который имеет следующие основные характеристики:
- мощность передатчика считывателя – не более 10 МВт;
-частотный диапазон – 900-920 МГц;
-дальность обнаружения контейнеров – несколько десятков метров.
Габариты радиочастотной метки, размещаемой на контейнере, - 8×15×5 мм, срок службы – не менее 20 лет, потребляемая мощность – 0 Вт.
Используемая радиочастотная метка по сравнению с машиносчитываемыми штриховыми кодами предоставляет возможность дистанционного считывания информации неограниченное число раз, в автоматическом режиме.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения, обеспечивается повышение избирательности, помехоустойчивости и надежности дуплексной радиосвязи между диспетчерским и геодезическим пунктом и объектами жизнеобеспечения городской инфраструктуры, выполненных с возможностью перемещения. Это достигается за счет подавления ложных сигналов (помех), принимаемых по каналу прямого прохождения и интермодуляционным каналам, с использованием фильтр-пробок, реализующих фазокомпенсационный метод.
| название | год | авторы | номер документа |
|---|---|---|---|
| Спутниковая система для определения местоположения судов и самолетов, потерпевших аварию | 2019 |
|
RU2723443C1 |
| Система контроля соблюдения правил дорожного движения | 2019 |
|
RU2725101C1 |
| Устройство контроля параметров движения транспортного средства | 2019 |
|
RU2741668C1 |
| Способ обнаружения и идентификации взрывчатых и наркотических веществ и устройство для его осуществления | 2019 |
|
RU2723987C1 |
| Когерентная радиолиния | 2019 |
|
RU2735923C1 |
| Экологический дирижабль | 2019 |
|
RU2725100C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ СТРОИТЕЛЬНЫМ КОМПЛЕКСОМ | 2016 |
|
RU2615025C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ОСОБО ВАЖНЫХ И ОПАСНЫХ ГРУЗОВ | 2016 |
|
RU2628986C1 |
Предлагаемая система относится к области дистанционного контроля и управления объектами жизнеобеспечения (теплоснабжения, водоснабжения, газоснабжения, электроснабжения, канализации, безопасности и т.д.) городской инфраструктуры, выполненными с возможностью перемещения, и может быть использована для принятия решений на всех уровнях контроля и управления технологическими процессами на указанных объектах с использованием компьютерной техники и радиочастотных меток. Техническим результатом изобретения является повышение избирательности, помехоустойчивости и надежности дуплексной радиосвязи между диспетчерским геодезическим пунктом и объектами жизнеобеспечения городской инфраструктуры путем подавления ложных сигналов (помех), принимаемых по каналам прямого прохождения и интермодуляционным каналам. Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры, выполненными с возможностью перемещения, содержит диспетчерский геодезический пункт 1, объекты 2 административного назначения, объекты 3 пожарной безопасности, объекты 4 специального назначения, объекты 5.i и 6.j коммунального хозяйства (i=1,2,…, n, j=1,2,…,m), устройства 7.l (l=1,2,…..,L) для управления робототехническим комплексами и систему 8 приема и передачи информации. Диспетчерский геодезический пункт 1 содержит дуплексную и передающую радиостанцию. Каждый объект жизнеобеспечения, выполненный с возможностью перемещения, содержит контейнер, снабженный радиочастотной меткой, выполненной с возможностью облучения ее считывателем для отражения номера контейнера, а также дуплексную радиостанцию, считыватель, первый и второй приемники. 7 ил.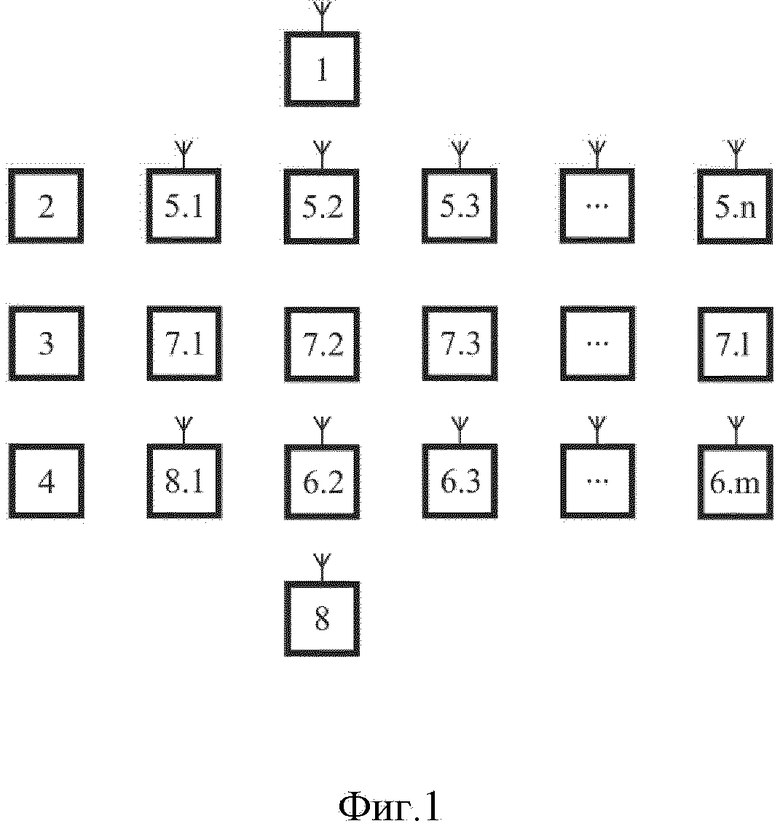
Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктурой, содержащая диспетчерский геодезический пункт, на котором установлены приемник GPS-сигналов с антенной, предназначенный для приема навигационного сигнала, используемого для вычисления дифференциальных поправок, передающая радиостанция, предназначенная для передачи дифференциальных поправок на объект жизнеобеспечения, и дуплексная радиостанция, на борту каждого объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, установлены дуплексная радиостанция, первый приемник с антенной, предназначенный для приема навигационного GPS-сигнала, используемого для вычисления дифференциальных поправок, при этом между диспетчерским геодезическим пунктом и каждым объектом жизнеобеспечения установлены пейджинговая и двухсторонняя радиосвязи непосредственно и/или через систему приема и передачи информации, дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, содержит последовательного включенные компьютер, первый задающий генератор, первый фазовый манипулятор, второй вход которого через источник дискретного сообщения соединен с компьютером, первый амплитудный модулятор, второй вход которого через источник аналогового сообщения соединен с компьютером, первый смеситель, второй вход которого соединен с выходом первого гетеродина, первый усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход–выход которого связан с первой приемопередающей антенной, и второй усилитель мощности, последовательно включенный второй гетеродин, второй смеситель, первый усилитель второй промежуточной частоты, второй ключ, первый усилитель-ограничитель, первый синхронный детектор, второй вход которого соединен с выходом второго ключа, компьютер и блок регистрации, последовательно подключенные к выходу первого усилителя-ограничителя первый перемножитель, второй вход которого соединен с выходом второго гетеродина, первый полосовой фильтр и первый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, а выход подключен к компьютеру, последовательно подключенные к выходу первого гетеродина первый колебательный контур, первый узкополосный фильтр, первый амплитудный детектор и второй пороговый блок, выход которого соединен со вторым входом второго ключа, передающая радиостанция содержит последовательно включенные второй задающий генератор, второй фазовый манипулятор, второй вход которого соединен с прибором дифференциальных поправок, подключенным к выходу приемника GPS-сигналов с антенной, третий усилитель мощности и передающую антенну, дуплексная радиостанция, размещенная на каждом объекте жизнеобеспечения, содержит последовательно включенные микропроцессор, к которому подключены датчик номера объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, и датчик состояния объекта жизнеобеспечения, третий задающий генератор, третий фазовый манипулятор, второй амплитудный модулятор, второй вход которого соединен с микропроцессором, третий смеситель, второй вход которого соединен с выходом третьего гетеродина, второй усилитель второй промежуточной частоты, четвертый усилитель мощности, второй дуплексер, вход-выход которого связан со второй приемопередающей антенной, и пятый усилитель мощности, последовательно включенные четвертый гетеродин, четвертый смеситель, второй усилитель первой промежуточной частоты, третий ключ, второй усилитель-ограничитель, второй синхронный детектор, второй вход которого соединен с выходом третьего ключа, и микропроцессор, последовательное подключённые к выходу второго усилителя-ограничителя второй перемножитель, второй вход которого соединен с выходом четвертого гетеродина, второй полосовой фильтр и второй фазовый детектор, второй вход которого соединен с выходом третьего гетеродина, а выход подключен к микропроцессору, последовательно подключенные к выходу третьего гетеродина второй колебательный контур, второй узкополосный фильтр, второй амплитудный детектор и третий пороговый блок, выход которого соединен со вторым входом третьего ключа, первый приемник, размещенный на каждом объекте жизнеобеспечения, содержит последовательно включенные вторую приемную антенну, усилитель высокой частоты, первую линию задержки, третий фазовый детектор, второй вход которого соединен с выходом усилителя высокой частоты, и блок определения местоположения объекта жизнеобеспечения, второй вход и выход которого подключены к микропроцессору дуплексной радиостанции, второй приемник с третьей приемной антенной, размещенный на каждом объекте жизнеобеспечения, подключен к микропроцессору дуплексной радиостанции, к выходу третьего задающего генератора последовательного подключены шестой усилитель мощности, третий дуплексер, вход-выход которого связан с третьей приемопередающей антенной, седьмой усилитель мощности, четвертый фазовый детектор, второй вход которого соединен с выходом третьего задающего генератора, коррелятор, второй вход которого соединен с микропроцессором, первый пороговый блок, первый ключ, второй вход которого соединен с выходом четвертого фазового детектора, вторая линия задержки, сумматор, второй и третий входы которого соединены со вторым выходом датчика номера объекта жизнеобеспечения городской инфраструктуры, выполненного с возможностью перемещения, и микропроцессором соответственно, а выход подключен ко второму входу третьего фазового манипулятора, к выходу первого порогового блока подключены световой и звуковой маячки, к выходу первого ключа подключен второй блок регистрации, каждый контейнер, предназначенный для обнаружения объекта жизнеобеспечения городской инфраструктуры, снабжен радиочастотной меткой, выполненной с возможностью облучения ее считывателем, установленным на объекте жизнеобеспечения городской инфраструктуры, для отражения номера контейнера, выполненной в виде пьезокристалла с нанесенным на его поверхность алюминиевым тонкопленочным встречно-штыревым преобразователем поверхностных акустических волн и набором отражателей, причем встречно-штыревой преобразователь состоит из двух гребенчатых систем электродов, нанесенных на поверхность пьезокристалла, электроды каждой из гребенок соединены друг с другом шинами, которые в свою очередь соединены с микрополосковой приемопередающей антенной, изготовленной также на поверхности пьезокристалла, отличающаяся тем, что дуплексная радиостанция, размещенная на диспетчерском геодезическом пункте, снабжена вторым, третьим и четвертым сумматорами, третьим узкополосным фильтром, третьим и четвертым полосовыми фильтрами и тремя фазоинверторами, причем к выходу второго усилителя мощности последовательного подключены третий узкополосный фильтр, первый фазоинвертор, второй сумматор, второй вход которого соединен с выходом второго усилителя мощности, третий полосовой фильтр, второй фазоинвертор, третий сумматор, второй вход которого соединен с выходом второго сумматора, четвертый полосовой фильтр, третий фазоинвертор и четвертый сумматор, второй вход которого соединен с выходом третьего сумматора, а выход подключен ко второму входу второго смесителя и первого колебательного контура, а дуплексная радиостанция, размещенная на каждом объекте жизнеобеспечения, снабжена пятым, шестым и седьмым сумматорами, четвертым узкополосным фильтром, пятым и шестым полосовыми фильтрами, четвертым, пятым и шестым фазоинверторами, причем к выходу пятого усилителя мощности последовательно подключены четвертый узкополосный фильтр, четвертый фазоинвертор, пятый сумматор, второй вход которого соединен с выходом пятого усилителя мощности, пятый полосовой фильтр, пятый фазоинвертор, шестой сумматор, второй вход которого соединен с выходом пятого сумматора, шестой полосовой фильтр, шестой фазоинвертор, седьмой сумматор, второй вход которого соединен с выходом шестого сумматора, шестой полосовой фильтр, шестой фазоинвертор и седьмой сумматор, второй вход которого соединен с выходом шестого сумматора, а выход подключен ко второму входу четвертого смесителя и второго колебательного контура.
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| СИСТЕМА УЧЁТА, НАВИГАЦИИ И МОНИТОРИНГА ОБЪЕКТОВ | 2017 |
|
RU2648967C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2000 |
|
RU2172524C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2010 |
|
RU2435228C1 |
| WO 2019006537 A1, 10.01.2019 | |||
| US 9562938 B2, 07.02.2017 | |||
| US 5574648 A, 12.11.1996 | |||
| US 5438517 A, 01.08.1995 | |||
| ПОДШИПНИК СКОЛЬЖЕНИЯ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2007 |
|
RU2438877C2 |

