[01] Область техники
[02] Изобретение относится к области транспорта, а именно к системе доставки небольших грузов (до 15 кг) по городу или между городами в автоматизированном режиме без непосредственного участия человека.
[03] Уровень техники
Из уровня техники известны системы для транспортировки людей и грузов с помощью подвесных транспортных средств, перемещаемых по воздушным трассам, проложенных на высотных опорах (см., например, публикацию заявки США US 2016229416, 11.08.2016, публикация международной заявки WO 2014078586, 22.05.2014, патент РФ RU 2652599, 27.04.2018).) Недостатком этих систем является отсутствие возможности их оптимизации для автоматизированной доставки грузов, а также их интеграции в существующую городскую инфраструктуру без ее существенного изменения.
Наиболее близким аналогом изобретения по совокупности совпадающих признаков является система доставки посылок, раскрытая в патенте США US 1508994, 16.09.1924. Указанная система также предназначена для доставки небольших грузов и включает пункты приема и выдачи, воздушную трассу, связывающие указанные пункты, а также подвесные контейнеры для размещения грузов, выполненные с возможностью перемещения по указанной воздушной трассе. Недостатком указанной системы является отсутствие возможности автоматизации процесса отправки и получения грузов.
[04] Раскрытие сущности изобретения
[05] Основной технической проблемой, на решение которой направлено заявленное изобретение, является сложность организации и функционирования систем надземной доставки грузов в условиях городской среды.
[06] Технический результат изобретения заключается в повышении скорости доставки грузов, упрощении интеграции системы в существующую городскую инфраструктуру и упрощении конструкции системы.
[07] Указанный технический результат достигается в изобретении за счет того, что автоматизированная система доставки грузов содержит терминалы приема и выдачи грузов, воздушные трассы, связывающие указанные терминалы, и подвесные контейнеры для размещения грузов, выполненные с возможностью перемещения по воздушным трассам. При этом каждый контейнер содержит корпус для размещения груза, крышку, колесную часть для перемещения по воздушным трассам, приводной электродвигатель, аккумулятор, управляющий процессор и средство беспроводной связи. Воздушные трассы содержат жесткий каркас и закрепленные на нем направляющие элементы, выполненные с возможностью размещения в них колесной части контейнеров, при этом указанные трассы смонтированы на опорах для освещения или электроснабжения и связаны между собой посредством поворотных механизмов для изменения траектории перемещения контейнеров. Каждый терминал содержит автоматизированные средства для загрузки, разгрузки и хранения контейнеров, приема, выдачи и хранения грузов, а также блок управления и средство беспроводной связи. Причем система также включает центр управления, выполненный с возможностью связи с блоками управления терминалов, управляющими процессорами контейнеров, а также пользовательскими устройствами отправителей и получателей грузов.
[08] Кроме того, для достижения технического результата предусмотрены частные варианты реализации изобретения, согласно которым:
[09] - поворотный механизм содержит вращающуюся центральную направляющую для связи пересекающихся воздушных трасс, центральное реле переключения, блок управления и средство для беспроводной связи с контейнером;
[010] - поворотный механизм дополнительно включает дугообразные стрелочные направляющие для связи пересекающихся воздушных трасс и стрелочные реле переключения;
[011] - крышка контейнера выполнена отделяемой от его корпуса, при этом колесная часть, приводной электродвигатель, аккумулятор, управляющий процессор и средство беспроводной связи контейнера установлены на крышке или внутри нее.
[012] - на крышке контейнера или внутри нее дополнительно установлены датчики местоположения и контроля состояния контейнера;
[013] - управляющий процессор контейнера выполнен с возможность получения данных о маршруте контейнера из центра управления, а также передачи управляющих сигналов на поворотные механизмы для задания траектории перемещения.
[014] - терминалы дополнительно снабжены средствами определения массы и габаритов отправляемого груза, а также средствами для зарядки аккумуляторов контейнеров;
[015] - воздушные трассы закреплены внутри кольцевых монтажных конструкций, установленных на опорах;
[016] - в верхней части кольцевых монтажных конструкций установлены штыри, на которых закреплены страховочные тросы, удерживающие воздушные трассы.
[017] В отличие от аналогов заявленная система имеет возможность простого интегрирования в городскую среду, в частности, за счет следующих ее особенностей:
[018] - Конструкция трасс, а также поворотных механизмов позволяет осуществлять их монтаж на опоры систем освещения и электроснабжения, например, фонарные столбы, столбы электрических сетей, опоры линий электропередач и т.д. Т.е. система не требует строительства отдельных опорных элементов для установки воздушных трасс.
[019] - Использование автономных контейнеров с собственными двигателем, аккумулятором и устройством беспроводной связи позволяет обеспечить компактность и простоту конструкции воздушных трасс за счет того, что они не требуют подведения электроэнергии и использования дополнительных средств, как, например, токопроводящие рельсы, тяговые троса и т.д.
[020] - Конструкция трасс с жестким каркасом является надежной и безопасной, что позволяет использовать ее в условиях городской застройки.
[021] - Применение автоматизированных терминалов для приема, отправки и хранения грузов, а также загрузки, разгрузки и хранения контейнеров позволяет минимизировать площадь необходимую для функционирования системы.
[022] Кроме того, описанная конфигурация системы, которая включает центр управления, терминалы и контейнеры, имеющую беспроводную связь, повышает скорость работы системы и ее отказоустойчивость.
[023] Краткое описание чертежей
[024] Изобретение поясняется чертежами, где:
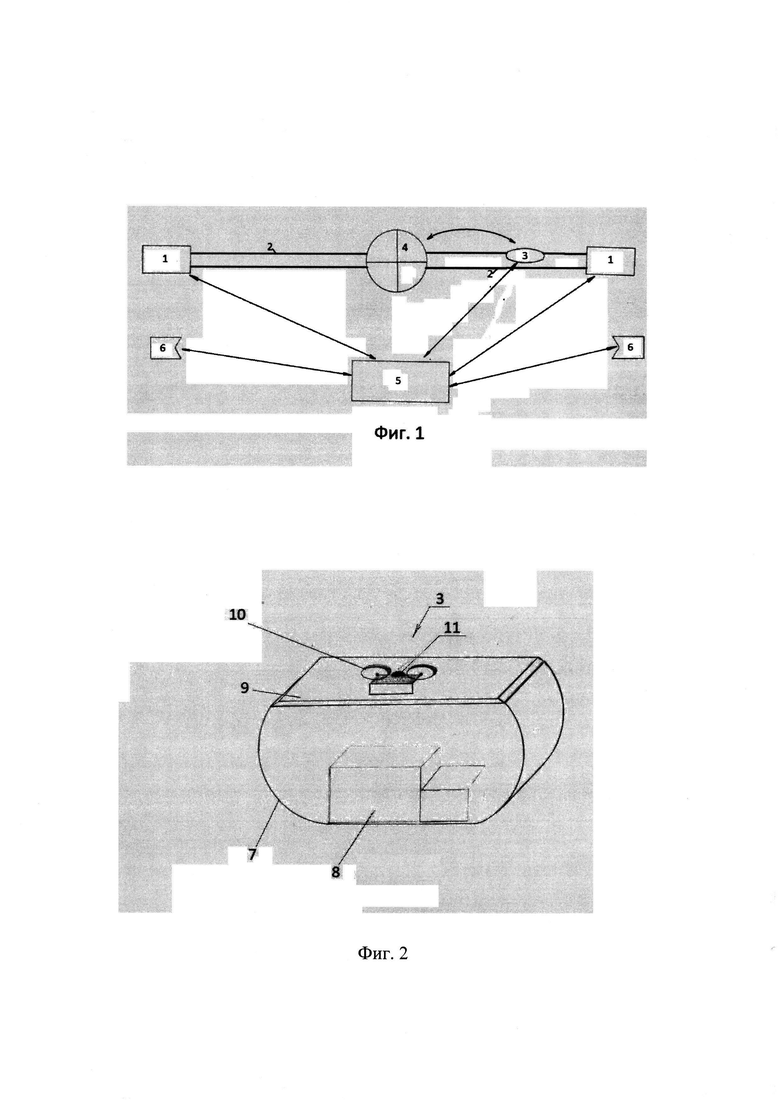
[025] На фигуре 1 показана принципиальная схема заявленной автоматизированной системы;
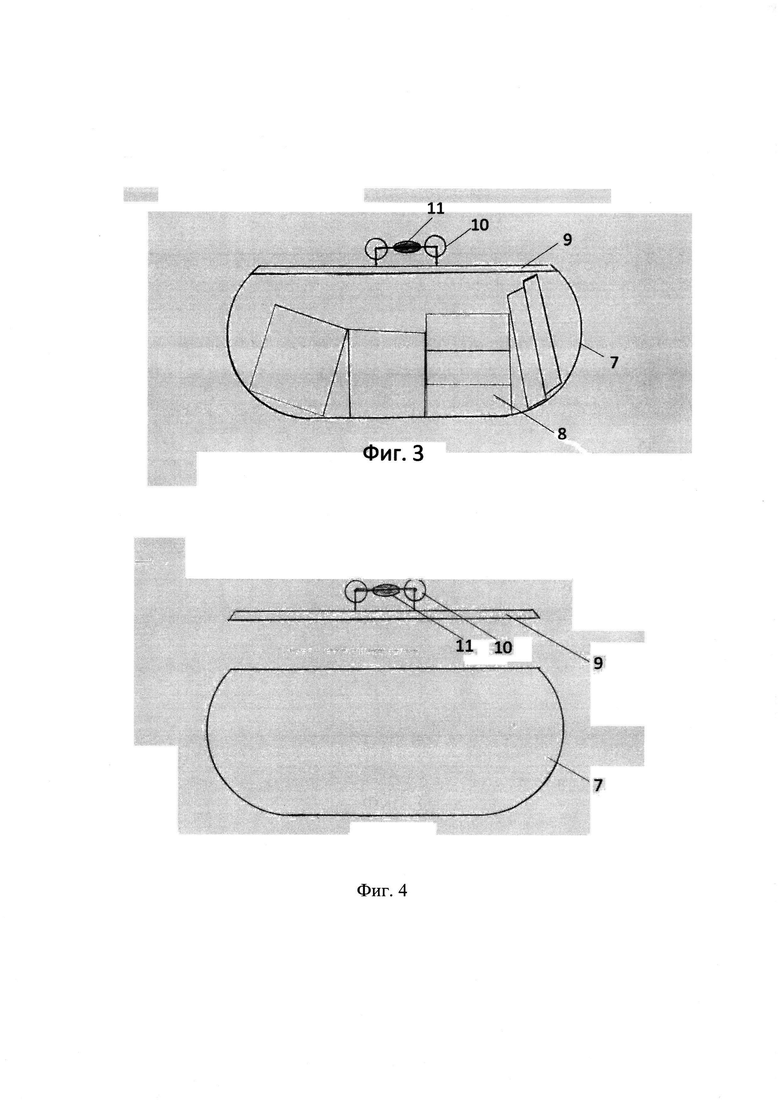
[026] На фигуре 2 показана принципиальная конструкция контейнера;
[027] На фигуре 3 показан вид контейнера в собранном состоянии;
[028] На фигуре 4 показан вид контейнера в разобранном состоянии;
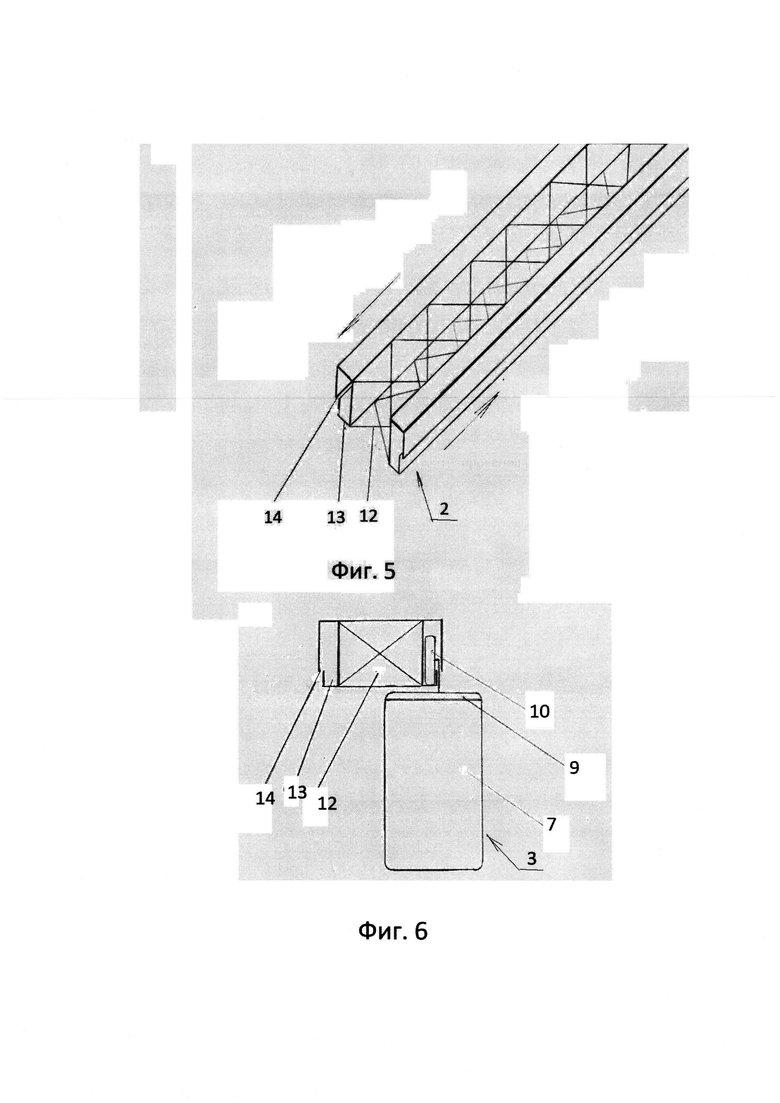
[029] На фигуре 5 показана конструкция воздушной трассы;
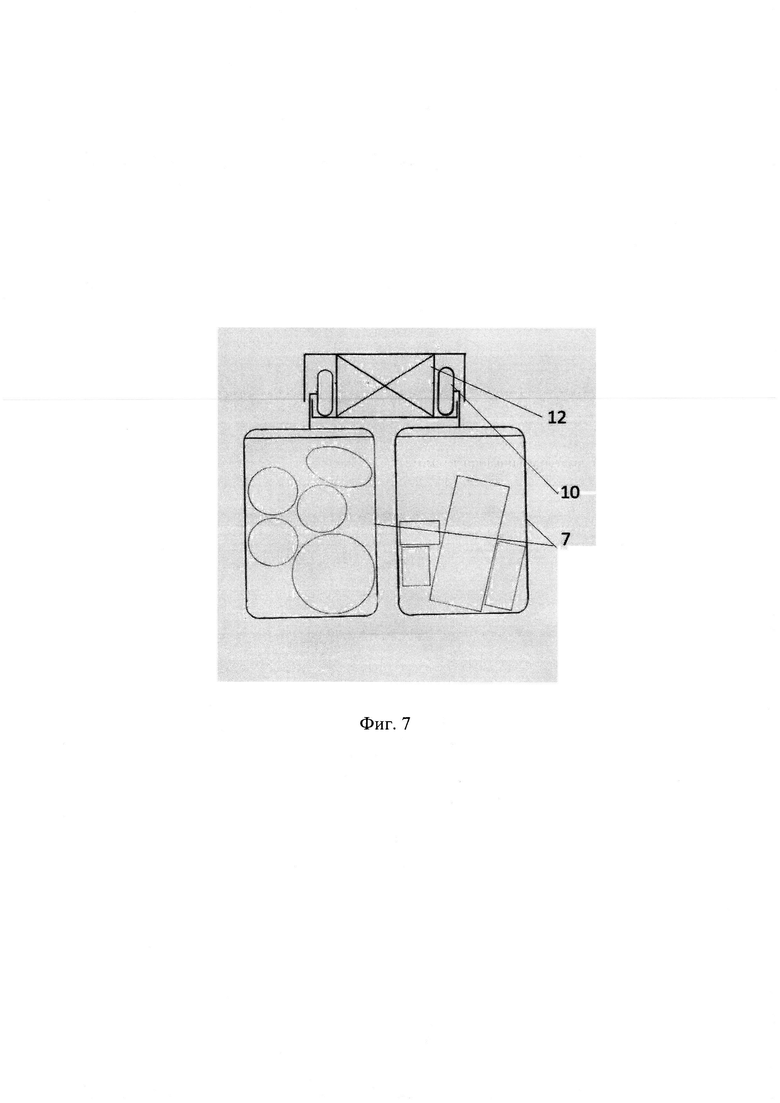
[030] На фигурах 6 и 7 показан вариант установки подвесного контейнера на воздушной трассе;
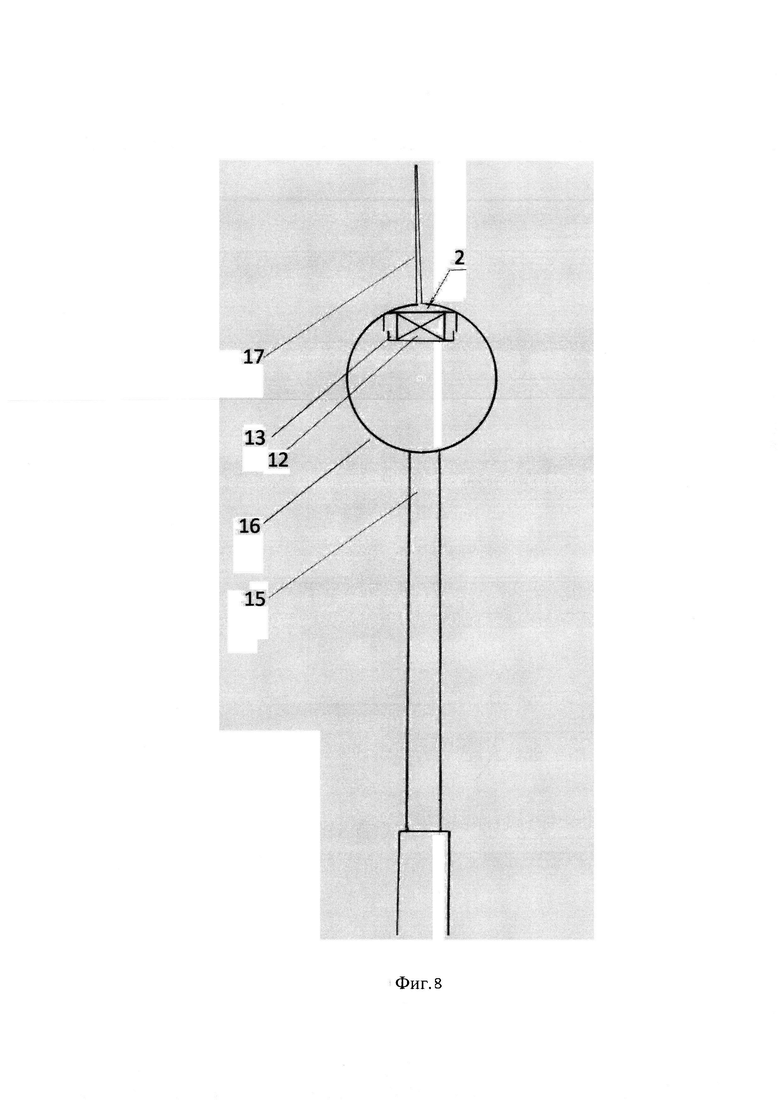
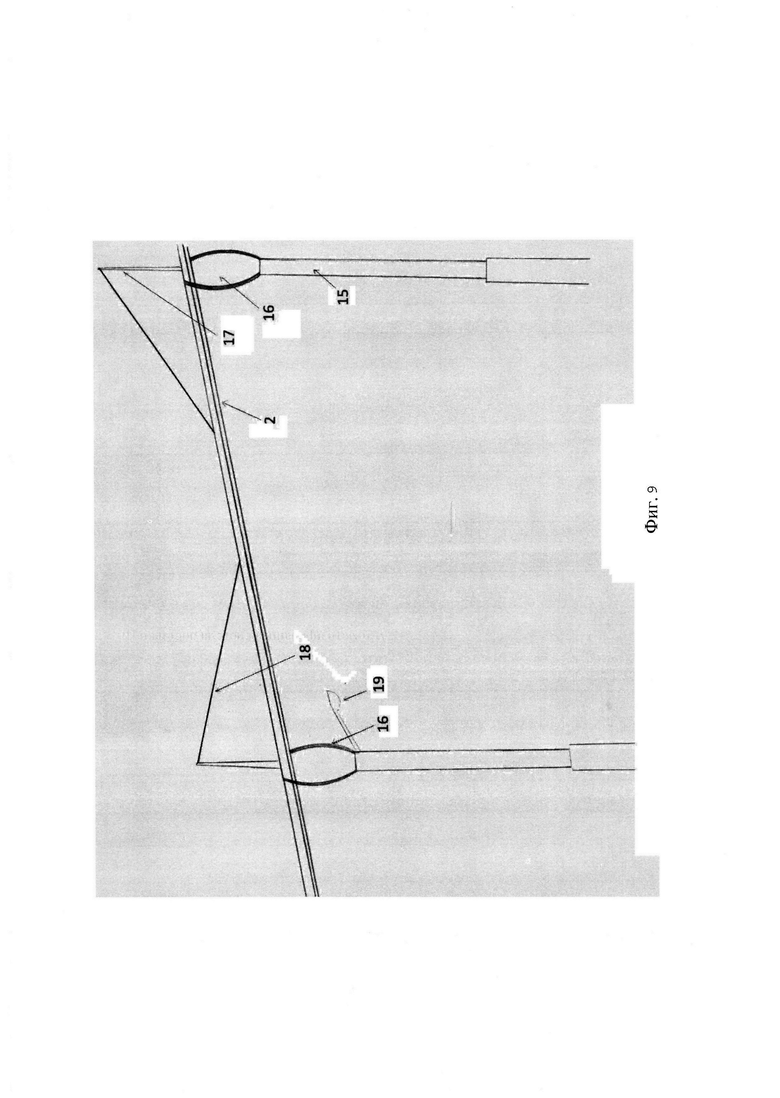
[031] На фигурах 8 и 9 показан вариант монтажа воздушной трассы на опоре;
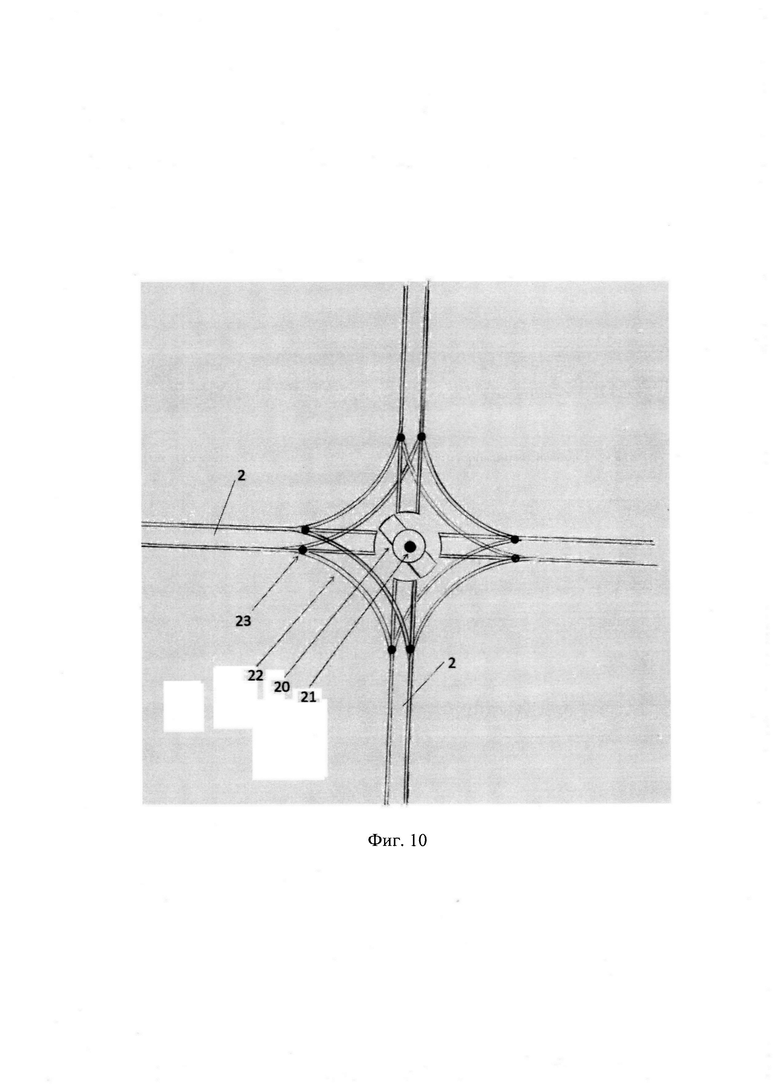
[032] На фигуре 10 показаны варианты конструкции крестово-поворотного и стрелочно-поворотного механизма;
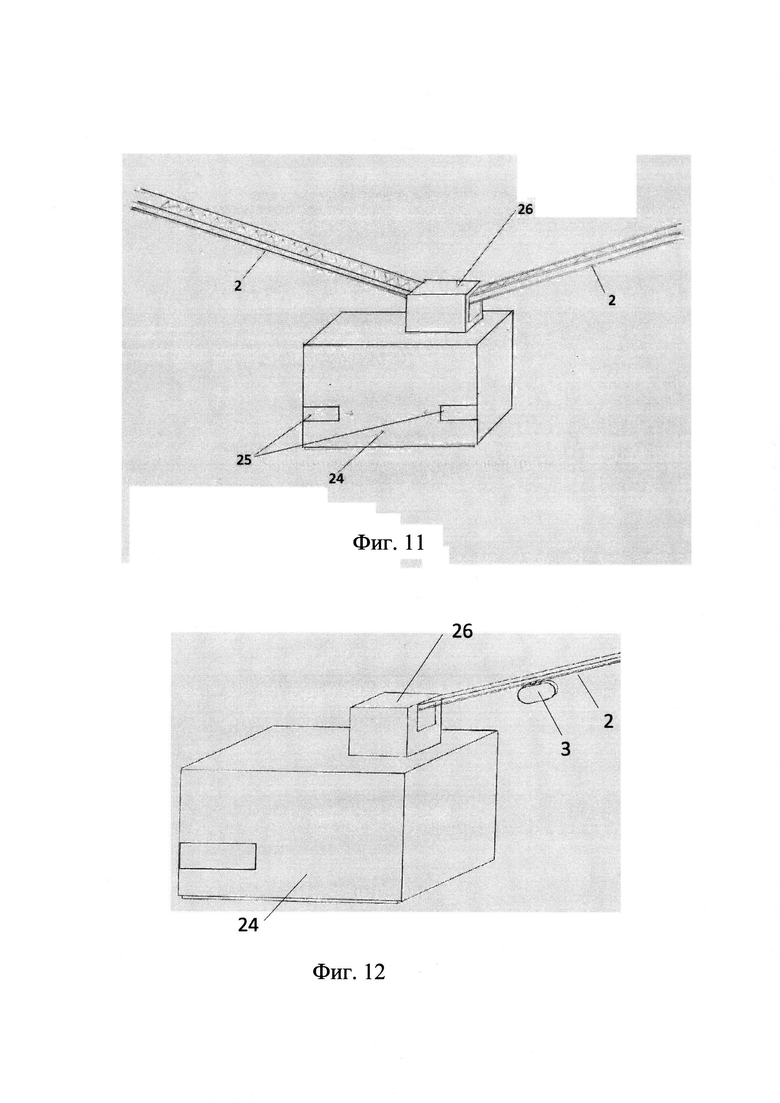
[033] На фигурах 11 и 12 показана возможная конфигурация терминала.
[034] Элементы конструкции и другие объекты обозначены на фигурах следующими позициями:
1 - терминал приема и выдачи грузов,
2 - воздушная трасса,
3 - контейнер,
4 - поворотный механизм,
5 - центр управления,
6 - пользовательское устройство,
7 - корпус контейнера,
8 - груз
9 - крышка контейнера,
10 - колесная часть контейнера,
11 - электродвигатель контейнера,
12 - каркас трассы,
13 - направляющие элементы трассы,
14 - щель направляющего элемента,
15 - опора (столб),
16 - кольцевая монтажная конструкция,
17 - штырь для страховочного троса,
18 - страховочный трос,
19 - фонарь,
20 - центральная направляющая поворотного механизма,
21 - центральное реле переключения,
22 - стрелочная направляющая поворотного механизма,
23 - стрелочное реле переключения,
24 - корпус терминала
25 - окно приема и выдачи груза,
26 - башня терминала
[035] Осуществление изобретения
[036] Заявленная система (см. фиг. 1) содержит следующие основные элементы: терминалы (1) для приема и выдачи грузов, воздушные трассы (2), связывающие указанные терминалы, подвесные контейнеры (3) для размещения грузов, приспособленные для перемещения по воздушным трассам, поворотные механизмы (4), позволяющие перемещать контейнеры между трассами, и центр управления (5), имеющий связь с терминалами (1), контейнерами (3) и также пользовательскими устройствами (6) отправителей и получателей грузов.
[037] Контейнер (3) (см. фиг. 2-4) представляет собой капсулу, имеющую корпус (7), в котором размещается груз (8) и отделяемую от корпуса крышку (9). Корпус (7) может иметь аэродинамическую форму прямоугольного параллелепипеда с округленными торцевыми стенками. Объем корпуса, как правило, не превышает 100 литров и имеет максимальную грузоподъемность 15 кг. На крышке смонтирована колесная часть (10) для перемещения контейнера по воздушным трассам (2), связанная с электродвигателем (11). Кроме того, на крышке или внутри нее также размещены встроенный аккумулятор, управляющий процессор, датчики GPS и контроля состояния контейнера, а также средство беспроводной связи (на чертежах не показаны). Управляющий процессор обеспечивает запись маршрута движения капсулы, управление электродвигателем (11) контейнера, а также поворотными механизмами (4). Крышка (9) фиксируется на корпусе (7) с помощью электрозамков, расположенных в данной крышке (на чертежах не показаны).
[038] Воздушная трасса (2) (см. фиг. 5-7) представляет собой подвесную конструкцию, включающую жесткий каркас (12) в виде пространственной рамы, а также связанные с ним два направляющих элемента (13) коробчатой формы, образующие дорожки для перемещения колесной части (10) контейнера (2) в двух направлениях. При этом направляющие элементы (13) имеют щели (13) для прохождения подвесных элементов контейнера с обеспечением плотного контакта этих элементов с направляющими элементами (14). Трасса может иметь поперечные размеры 35×25 см.
[039] Монтаж воздушных трасс (2) осуществляется на опорах для освещения (например, фонарях) или передачи электроэнергии (столбы линии электропередач) (см. фиг. 8-9). При этом монтаж может осуществляться как на уже существующие опоры, так и на новые опоры, устанавливаемые взамен имеющихся с сохранением функциональности систем освещения и электроснабжения. Для этого на высотную опору (15) (столб) может быть установлена монтажная конструкция (16) в форме кольца, внутри которой в верхней части крепится воздушная трасса (2). Трассы целесообразно размещать на высоте не менее 7 метров от земли. При этом сверху монтажной конструкции может быть установлен штырь (17) для страховочного троса (18), обеспечивающего дополнительную фиксацию трассы (2) и гашение резонансных колебаний. Под монтажной конструкцией (16) на опоре (15) может быть закреплен фонарь (19) уличного освещения.
[040] Поворотные механизмы (4) для воздушных трасс (2) могут иметь различную конфигурацию.
[041] В качестве одного варианта для связи двух перпендикулярно пересекающихся трасс (2) может применяться крестово-поворотный механизм (см. фиг. 10). Механизм содержит вращающуюся центральную направляющую (20) с закругленными концами для плотного контакта с концами пересекающихся трасс (2). Механизм также имеет центральное реле переключения (21), работающее от внешнего источника энергии, которое обеспечивает поворот направляющей, блок управления и средство беспроводной связи (на чертежах не показаны). Если контейнер (3) должен двигаться прямо по трассе механизм остается в замкнутом состоянии и контейнер перемещается без остановки. Если предусмотрен поворот контейнера с переходом на перпендикулярную трассу он останавливается в центре направляющей (20), и после ее поворота на 90° продолжает свое движение в одном из направлений. Такой вариант конструкции может использоваться в менее загруженных участках системы транспортировки.
[042] В качестве другого варианта может применяться стрелочно-поворотный механизм (см. фиг. 10). Механизм, так же как и в первом варианте, имеет вращающуюся центральную направляющую (20) с центральным реле переключения (21), а также дополнительные стрелочные направляющие (22) дугообразной формы, связывающие перпендикулярные участки трасс для обоих направлений движения. При этом на каждой стрелочной направляющей установлено стрелочное реле переключения (23). В данном варианте возможно заранее задать контейнеру траекторию перемещения и направить его в нужном направлении без его остановки. Такой вариант может применяться на более загруженных участках системы.
[043] Терминал (1) системы (см. фиг. 11 и 12) представляет собой станцию, питающуюся от внешнего источника энергии. Терминал, как правило, имеет корпус (24), образующий пространство достаточное для обеспечения загрузки и разгрузки прибывших и отправляемых контейнеров, а также для хранения полученных грузов и определенного количества пустых контейнеров. Внешне терминал имеет одно или несколько окон (25) для приема и выдачи груза пользователям. Терминал может быть связан с трассой (2) с помощью башни (26), обеспечивающей возможность спуска контейнера (3) в корпус (24). Терминал также снабжен блоком управления, средством заряда аккумуляторов контейнеров, средством для взвешивания грузов и средством беспроводной связи (на чертежах не показана)
[044] Все операции по загрузке, разгрузке, приему и отправки контейнеров, а также приему и выдаче грузов осуществляются в терминале автоматическом режиме с помощью роботизированных средств, которые хорошо известны специалистам в данной области техники.
[045] Система работает следующим образом.
[046] Отправитель с помощью пользовательского устройства (6) (например, компьютера или мобильного телефона с установленным приложением, подключенного к сети Интернет) задает начальную и конечную точку отправки груза. Указанная информация поступает в центр управления (5), который сообщает данные о ближайшем терминале, используя геолокацию устройства (6), а также о наличии в нем свободных контейнеров (3).
[047] Далее отправитель приносит груз (посылку) (8) в терминал (1), в котором производится его взвешивание, определение габаритов, а также погрузка в контейнер (3). При этом центр управления (5) напрямую или через блок управления терминала (1) передает информацию о маршруте движения контейнера в его управляющий процессор и информирует отправителя и получателя груза о времени и месте прибытия контейнера. В процессе перемещения процессор контейнера (3) с помощью беспроводной связи передает управляющие сигналы на реле (21, 23) переключения поворотных механизмов (4), которые задают направление его движения согласно маршруту. В непредвиденных ситуациях (например, при аварии) центр управления (5) может скорректировать маршрут, информируя об этом отправителя и получателя.
[048] Далее контейнер (3) поступает в терминал (1) рядом с местом назначения, и производится разгрузка контейнера (3) с размещением груза (8) в месте хранения этого терминала.
[049] Получатель приходит в данный терминал и посредством ввода кода или другого способа идентификации инициирует выдачу груза.
[050] Таким образом, система имеет следующие преимущества:
[051] - Система может быть легко интегрирована в существующую городскую инфраструктуру, поскольку она является компактной и практически не требует дополнительного пространства для размещения объектов,
[052] - Значительно повышается скорость доставки груза, которая не зависит от транспортной ситуации в городе.
[053] - Снижается транспортная загруженность на автодорогах, поскольку система способна покрыть до 40% потребности в доставке грузов, осуществляемой наземным транспортом,
[054] - Система является безопасной для использования в городских условиях, поскольку конструкция воздушных трасс и контейнеров исключает возможность падения элементов,
[055] - Система является полностью экологичной и практически не создает шумового загрязнения.
[056] - Система обеспечивает хороший экономический эффект, поскольку затраты на ее развертывание могут быстро окупиться при должной загрузке.
Изобретение относится к области транспорта, а именно к системе доставки небольших грузов (до 15 кг) по городу или между городами в автоматизированном режиме без непосредственного участия человека. Система содержит терминалы (1) приема и выдачи грузов, воздушные трассы (2), связывающие указанные терминалы (1), и подвесные контейнеры (3) для размещения грузов (8), выполненные с возможностью перемещения по воздушным трассам (2). Каждый контейнер (3) содержит корпус (7) для размещения груза (8), крышку (9), колесную часть (10) для перемещения по воздушным трассам, приводной электродвигатель (11), аккумулятор, управляющий процессор и средство беспроводной связи. Воздушные трассы (2) содержат жесткий каркас (12) и закрепленные на нем направляющие элементы (13), выполненные с возможностью размещения в них колесной части (10) контейнеров (3), при этом указанные трассы (2) смонтированы на опорах (15) для освещения или электроснабжения и связаны между собой посредством поворотных механизмов (4) для изменения траектории перемещения контейнеров. Каждый терминал содержит автоматизированные средства для загрузки, разгрузки и хранения контейнеров, приема, выдачи и хранения грузов, а также блок управления и средство беспроводной связи. При этом система также включает центр управления (5), выполненный с возможностью связи с блоками управления терминалов (1), управляющими процессорами контейнеров (3), а также пользовательскими устройствами (6) отправителей и получателей грузов. В результате повышается скорость доставки грузов, упрощается интеграция системы в существующую городскую инфраструктуру, упрощается конструкция системы. 8 з.п. ф-лы, 12 ил.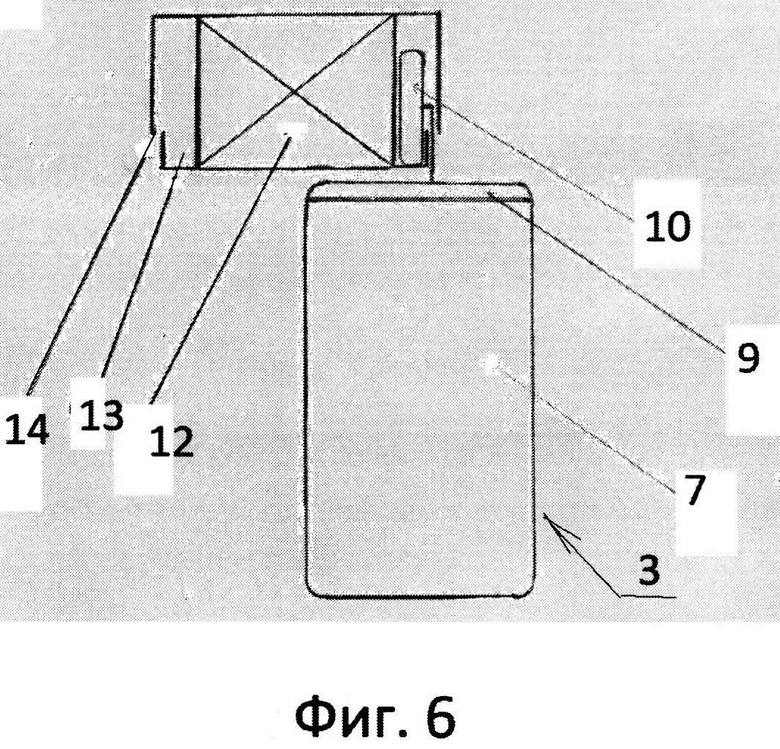
1. Автоматизированная система доставки грузов, содержащая терминалы (1) приема и выдачи грузов, воздушные трассы (2), связывающие указанные терминалы (1), и подвесные контейнеры (3) для размещения грузов (8), выполненные с возможностью перемещения по воздушным трассам (2), отличающаяся тем, что
каждый контейнер (3) содержит корпус (7) для размещения груза (8), крышку (9), колесную часть (10) для перемещения по воздушным трассам, приводной электродвигатель (11), аккумулятор, управляющий процессор и средство беспроводной связи,
воздушные трассы (2) содержат жесткий каркас (12) и закрепленные на нем направляющие элементы (13), выполненные с возможностью размещения в них колесной части (10) контейнеров (3), при этом указанные трассы (2) смонтированы на опорах (15) для освещения или электроснабжения и связаны между собой посредством поворотных механизмов (4) для изменения траектории перемещения контейнеров,
каждый терминал содержит автоматизированные средства для загрузки, разгрузки и хранения контейнеров, приема, выдачи и хранения грузов, а также блок управления и средство беспроводной связи,
при этом система также включает центр управления (5), выполненный с возможностью связи с блоками управления терминалов (1), управляющими процессорами контейнеров (3), а также пользовательскими устройствами (6) отправителей и получателей грузов.
2. Система по п. 1, отличающаяся тем, что поворотный механизм (4) содержит вращающуюся центральную направляющую (20) для связи пересекающихся воздушных трасс (2), центральное реле переключения (21), блок управления и средство для беспроводной связи с контейнером.
3. Система по п. 2, отличающаяся тем, что поворотный механизм (4) дополнительно включает дугообразные стрелочные направляющие (22) для связи пересекающихся воздушных трасс и стрелочные реле переключения (23).
4. Система по п. 1, отличающаяся тем, что крышка (9) контейнера (3) выполнена отделяемой от его корпуса (7), при этом колесная часть (10), приводной электродвигатель (11), аккумулятор, управляющий процессор и средство беспроводной связи контейнера установлены на крышке (7) или внутри нее.
5. Система по п. 4, отличающаяся тем, что на крышке (9) контейнера (3) или внутри нее дополнительно установлены датчики местоположения и контроля состояния контейнера.
6. Система по п. 1, отличающаяся тем, что управляющий процессор контейнера (3) выполнен с возможностью получения данных о маршруте контейнера из центра управления (5), а также передачи управляющих сигналов на поворотные механизмы (4) для задания траектории перемещения.
7. Система по п. 1, отличающаяся тем, что терминалы (1) дополнительно снабжены средствами определения массы и габаритов отправляемого груза, а также средствами для зарядки аккумуляторов контейнеров.
8. Система по п. 1, отличающаяся тем, что воздушные трассы (2) закреплены внутри кольцевых монтажных конструкций (16), установленных на опорах (15).
9. Система по п. 8, отличающаяся тем, что в верхней части кольцевых монтажных конструкций (16) установлены штыри (17), на которых закреплены страховочные тросы (18), удерживающие воздушные трассы (2).
| МНОГОФУНКЦИОНАЛЬНЫЙ ГОРОДСКОЙ КОМПЛЕКС И АВТОМАТИЗИРОВАННАЯ ПОДЗЕМНАЯ СИСТЕМА АДРЕСНОЙ ДОСТАВКИ ГРУЗОВ | 2013 |
|
RU2526202C1 |
| Устройство для загрузки и распределения силосуемого корма в траншейных хранилищах | 1987 |
|
SU1508994A2 |
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| KR 20110134583 A, 15.12.2011. | |||

