Область техники
Заявленное изобретение относится к области многокомпонентных робототехнических систем, которые спроектированы для работы в области логистики и могут быть использованы для доставки товаров и корреспонденции населению, в том числе проживающему за пределами границ городских поселений, в частности, в отдаленных от цивилизации населенных пунктах, жители которых остро нуждаются в получении почтовых услуг и возможности информационного обмена с внешним миром.
Уровень техники
Нередко работникам почтовой или курьерской службы приходится тратить время на доставку посылок адресатам, проживающим вдали от основного почтового или курьерского маршрута, например, в труднодоступных районах, за чертой населенного пункта. Посылки и корреспонденцию туда приходится доставлять либо пешком, при отсутствии технической возможности проезда, либо специально заезжать на автомобиле ради одного или нескольких адресатов. Кроме того, в условиях загруженности дорог в городских и иных поселениях доставка посылок и корреспонденции все еще занимает значительное время, и требуется привлечение больших трудовых ресурсов. Кроме того, в условиях масштабного распространения вирусных и иных заболеваний доставка товаров и корреспонденции мобильными, полностью роботизированными комплексами становится все более актуальной и безопасной.
Из уровня техники известны различные технические решения, направленные на преодоление данной проблемы, в том числе мобильные комплексы доставки, использующие различные по конструкции беспилотные летательные аппараты, выполняющие обязанности по доставке различных почтовых грузов получателям в труднодоступные районы.
Так, из уровня техники известна мобильная роботизированная система доставки почтовых грузов (см. US 2014254896, кл. B25J 9/00, публ. 11.09.2014 г. [1]).
Известная система [1] содержит камеру приема-выдачи груза и мобильный робот-беспилотник (дрон), оснащенный процессором, выполненным с возможностью управления перемещением дрона на основе его географического положения и данных маршрута; картой памяти с возможностью хранения, по меньшей мере, данных о платежах, данных о покупках и данных маршрута; экраном и камерой для взаимодействия с пользователем; модулем GPS. Управление дроном осуществляется при помощи мобильного приложения, установленного на устройство пользователя, например, наручные часы, смартфон, устройства дополненной реальности.
Недостатком указанной системы [1] является возможность доставки грузов в ограниченном диапазоне габаритов, не превышающих габариты камеры приема-выдачи грузов и на ограниченное от зарядной станции расстояние, т.к. она выполнена стационарной.
Из уровня техники известна система доставки посылок с помощью дронов, базирующихся на транспортном средстве (см. Из US 2018196445, кл. B64C 39/02, публ. 12.07.2018 г. [2]).
В качестве транспортного средства известной системы доставки посылок [2] используется преимущественно электромобиль, который оснащен грузовым отсеком с посылками и специальным отсеком на крыше для размещения дронов, зарядной станции и системы крепления посылок к беспилотникам. Отсек оснащен сдвижной крышей, закрывающей роботизированную взлетно-посадочную площадку и открывающейся при взлете дрона.
Во время доставки посылок транспортное средство и дрон передают в почтовую компанию телеметрическую информацию для отслеживания местоположения и контроля процесса осуществления доставки посылок получателям. Доставка при помощи дрона осуществляется после выбора клиентом указанной опции в специальном мобильном приложении, установленном на коммуникатор пользователя.
Недостатком указанной системы [2] является необходимость ручной загрузки посылки в специализированный отсек дрона для последующей ее доставки получателю, что не позволяет полностью автоматизировать процесс доставки, требуя постоянного участия в нем человека.
Наиболее близким с точки зрения технической сущности по отношению к заявленному изобретению следует считать мобильный комплекс по доставке грузов, выполненный в виде грузового транспортного средства (см. WO2020104568, G06Q10/08, публ. 28.05.2020г. [3]).
Грузовое транспортное средство, известное из [3] содержит автономную грузовую платформу с мобильным грузовым транспортером, отсеками для грузов и беспилотных летательных аппаратов и наземных роботов-доставщиков, компьютерный блок управления, средства связи. Транспортер содержит контроллер, выполненный с возможностью приема и передачи данных о позиционировании для обработки их компьютерным блоком управления.
Недостатком указанного мобильного комплекса [3] является возможность доставки грузов на ограниченное от зарядной станции расстояние, т.к. ее наличие в мобильном комплексе не предусмотрено. Кроме того, перемещение отсеков для грузов целиком по линейным направляющим внутри мобильного комплекса к шлюзам или зонам выхода не позволяет оптимально использовать пространство внутри комплекса, чтобы обеспечить максимальное заполнение грузами к доставке и при этом возможность их перемещения к месту соединения с роботами-доставщиками.
Раскрытие изобретения
Задачей представленного технического решения является создание высокопроизводительного автономного роботизированного мобильного комплекса курьерской доставки грузов и корреспонденции, обеспечивающего бесперебойную автоматизированную доставку грузов и корреспонденции в том числе в отдаленные населенные пункты, доступ к которым затруднен ввиду географического месторасположения или сезонных особенностей климата.
Техническим результатом предлагаемого изобретения, который решает указанную техническую задачу (техническую проблему), является реализация назначения по конструированию высокопроизводительного автономного роботизированного мобильного комплекса полностью автоматизированной, обладающей широком почтовым охватом, наземной и воздушной курьерской доставки грузов и корреспонденции.
Заданный технический результат достигается тем, что роботизированный мобильный курьерский комплекс, включает размещенные в контейнере или кузове транспортного средства структурно разделенные на функциональные в соответствии с назначением и связанные по ходу технологического процесса распределительный узел (I) с приемно-загрузочной и выпускной зонами, узел складирования и хранения (II), и робототехнический узел (III), формирующие автоматизированную курьерскую структуру, управление и контроль над которыми осуществляется при помощи подсистемы управления, состоящей из аппаратного модуля с процессором, связанного посредством модуля беспроводной связи с центральным контроллером и облачным сервером хранения и передачи данных, при этом:
- приемно-загрузочная зона распределительного узла (I) содержит загрузочный борт, а выпускная зона распределительного узла (I) содержит лифтовую платформу, передвигающуюся по транспортировочной шахте, имеющей сопряжения с переходными участками напольного и потолочного отсеков робототехнического узла (III), а также с переходным участком узла складирования и хранения (II), и по меньшей мере один люк;
- узел складирования и хранения (II) включает, по меньшей мере, одну мобильную конструкцию стеллажного типа с ячейками и оборудованным в потолочной части подвижным двух-координатным столом, соединенным посредством вертикально ориентированной стойки с подвижной шарообразной опорой, размещенной в напольной части, при этом на указанной вертикальной стойке установлен подвижный робот-манипулятор, сконфигурированный для захвата грузового объекта с целью его последующего позиционного контакта с неотделяемым оборудованием и/или воздушными и наземными роботами-курьерами;
- упомянутые напольный и потолочный отсеки робототехнического узла (III) оснащены посадочными сервисными участками для базирования наземных и воздушных роботов-курьеров, каждый из которых имеет взаимодействующую с указанной подсистемой управления интеллектуальную систему позиционирования и определения навигационного маршрута до места назначения, предусматривающую возможность взаимного информационного обмена с авторизованными пользователями.
По одному из вариантов исполнения приемно-загрузочная зона или робот-манипулятор оснащены устройством идентификации груза (например, устройством для сканирования штрих-кодов или qr-кодов) в целях осуществления двойной верификации отправленного на доставку груза либо подтверждения идентификации груза, упаковка которого осуществлена непосредственно в мобильном курьерском комплексе.
По одному из вариантов осуществления узел складирования и хранения оснащен аппаратом для автоматической упаковки грузов.
По одному из вариантов исполнения лифтовая платформа оснащена исполнительным механизмом в виде электропривода, оборудованного поршнем с толкателем и с захватным приспособлением, для осуществления перемещения груза с лифтовой платформы в любой из отсеков мобильного курьерского комплекса либо для перемещения груза в грузовой отсек наземного робота-курьера.
В одном из вариантов исполнения лифтовая платформа оснащена средством фото и видеоконтроля груза, находящегося на ней и / или весами, установленными непосредственно под площадку лифтовой платформы с целью контроля веса самой платформы и платформы с грузом.
Целесообразно, если узел складирования и хранения будет связан с напольным отсеком робототехнического узла с наземными роботами-курьерами посредством отверстия с дверцей с автоматическим запорным механизмом.
Указанное сочетание известных и новых конструктивных признаков не известно из исследуемого уровня техники, предложенное техническое решение обладает изобретательским уровнем и позволяет повысить процесс автоматизации курьерской доставки грузов, особенно в отдалённые и труднодоступные населенные пункты, а также позволяет обеспечить максимальную оптимизацию маршрутов и времени доставки грузов и исключить случаи, когда доставка при помощи только дронов невозможна из-за наличия естественных или искусственных препятствий (деревья, тупики) или погодных условий (проливные дожди, сильный ветер и т.п.) либо груз является достаточно крупногабаритным для доставки его при помощи дрона, или, наоборот, в случаях, когда доставка только наземными курьерами невозможна по причине наличия естественных или искусственных наземных препятствий.
Краткое описание чертежей
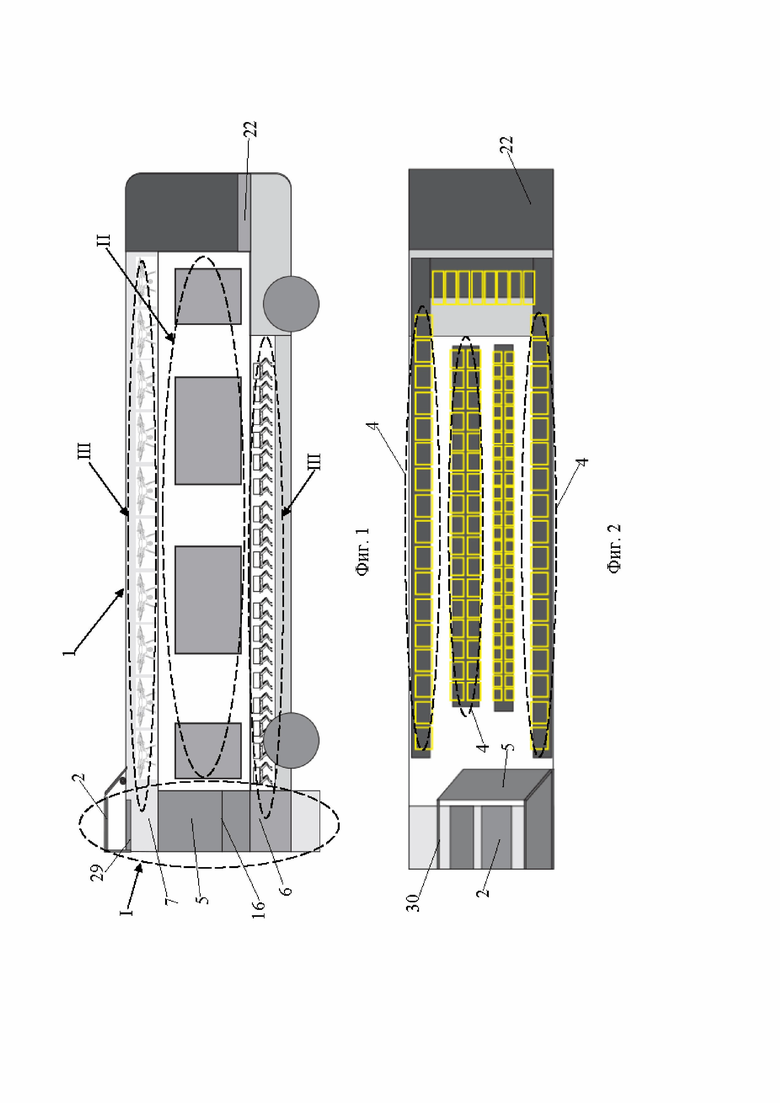
На фиг. 1 схематично представлено изображение предлагаемого комплекса сбоку, где наглядно представлены распределительный узел (I) с приемно-загрузочной и выпускной зонами, узел складирования и хранения (II), робототехнический узел (III), формирующие автоматизированную курьерскую структуру;
На фиг. 2 схематично представлено изображение распределительного узла (I) с приемно-загрузочной и выпускной зонами, узел складирования и хранения (II) (вид сверху);
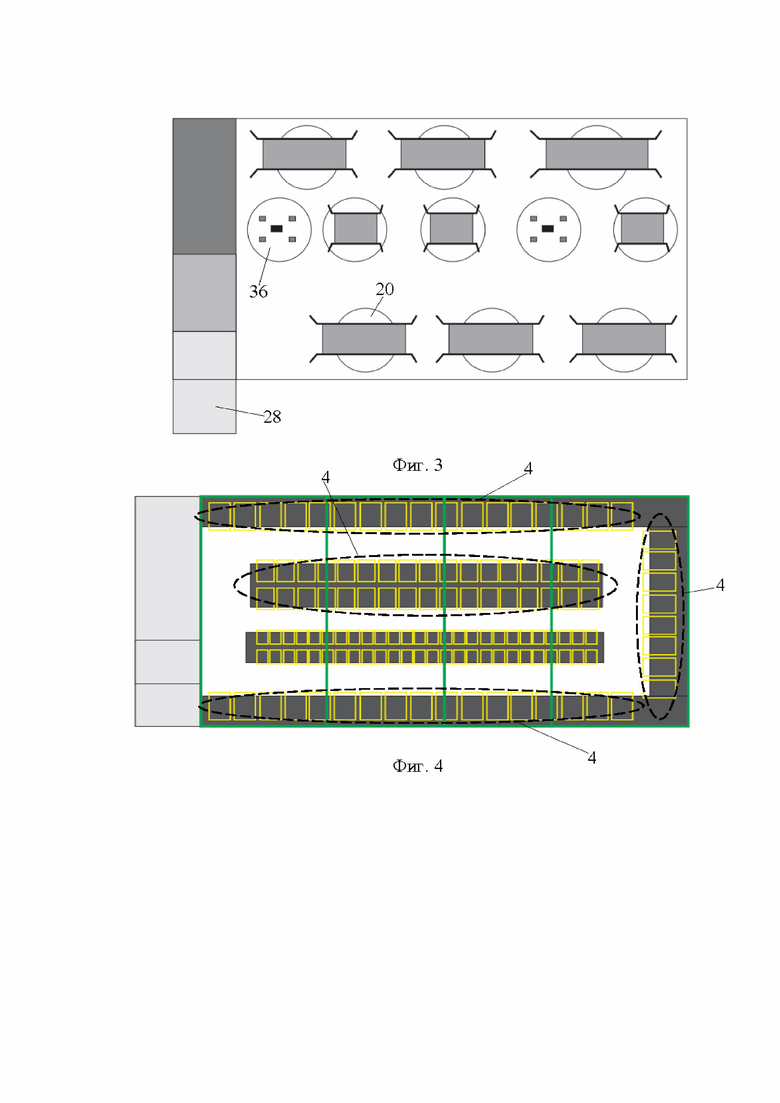
На фиг. 3 схематично представлен робототехнический узел (III) вид сверху с изображением наземных роботов-курьеров, мест их зарядки в робототехническом узле и указанием зон их размещения на зарядочных устройствах;
На фиг. 4 схематично представлены мобильные блоки стеллажного типа с заполненными грузом ячейками и установленные в узле складирования и хранения (II) мобильного курьерского комплекса;
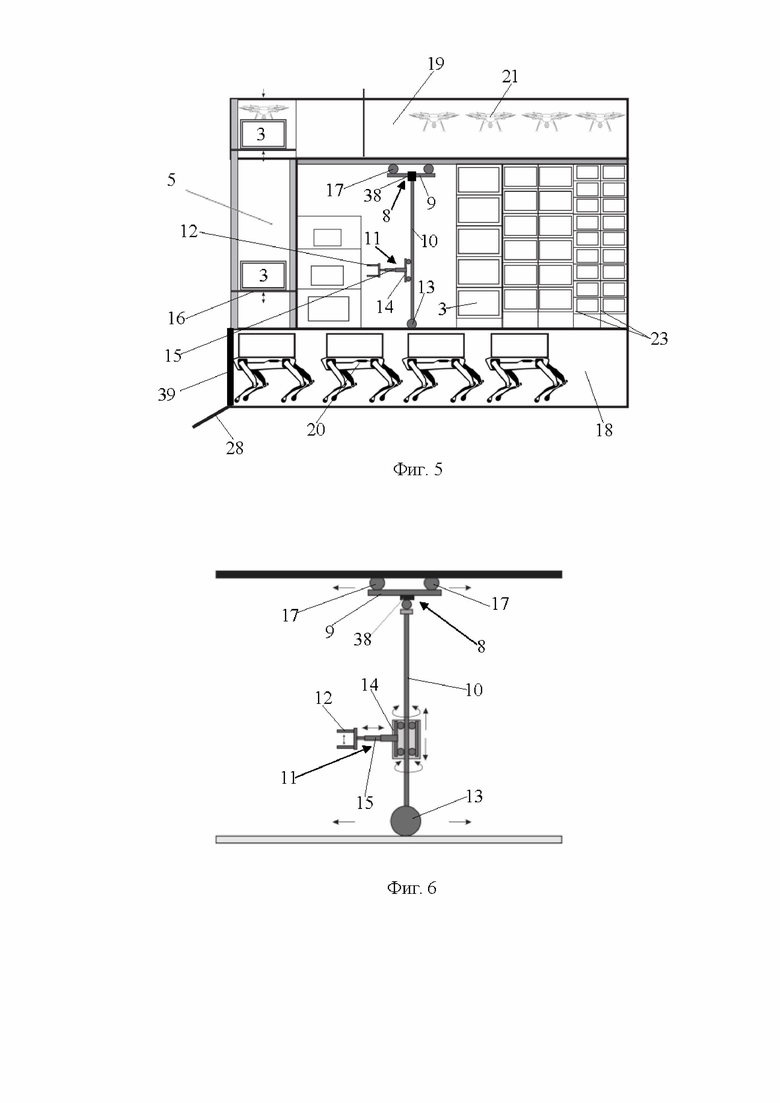
На фиг. 5 схематично представлено изображение манипуляторного роботизированного механизма, управляющего пространственным расположением объектов предлагаемого комплекса в узле складирования и хранения (II) и распределительном узле (I) (вид сбоку мобильного курьерского комплекса);
На фиг. 6 детально представлено изображение манипуляторного роботизированного механизма (вид сбоку);
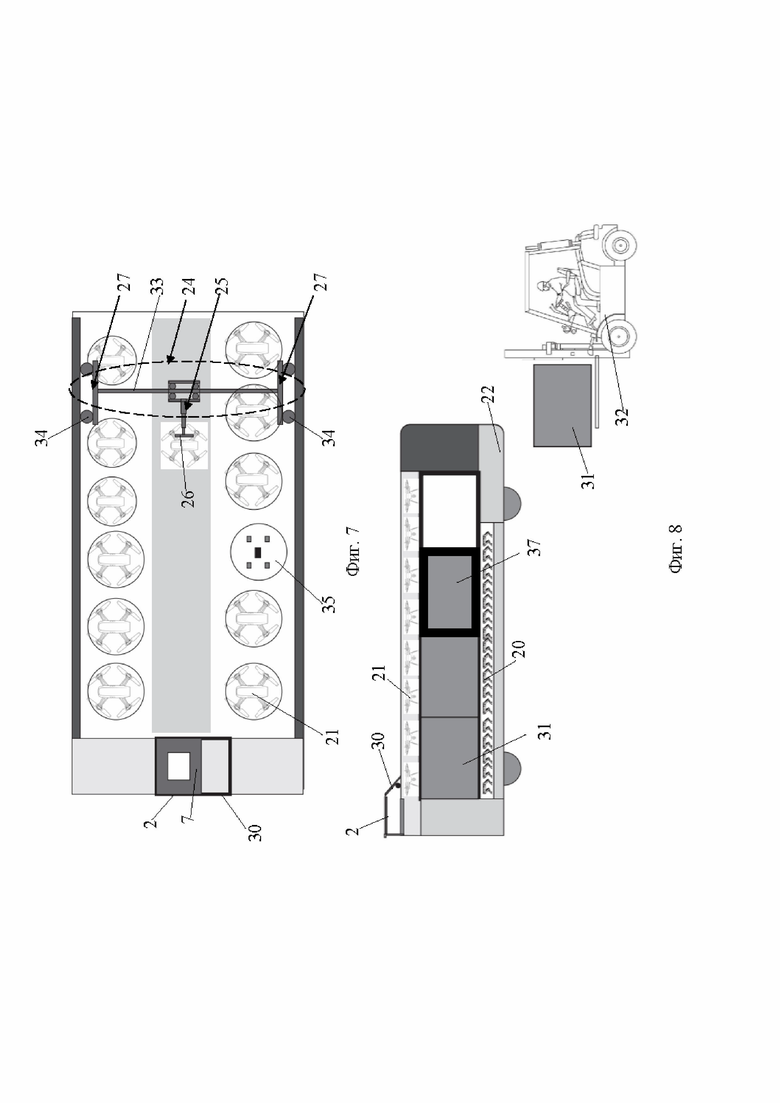
На фиг. 7 схематично представлена часть робототехнического узла (III), в которой располагаются на подзарядке воздушные роботы-курьеры и показано изображение второго роботизированного механизма, управляющего пространственным расположением воздушных роботов-курьеров;
На фиг. 8 схематично представлен процесс заполнения и загрузки в мобильный курьерский комплекс мобильных блоков стеллажного типа с заполненными грузом ячейками;
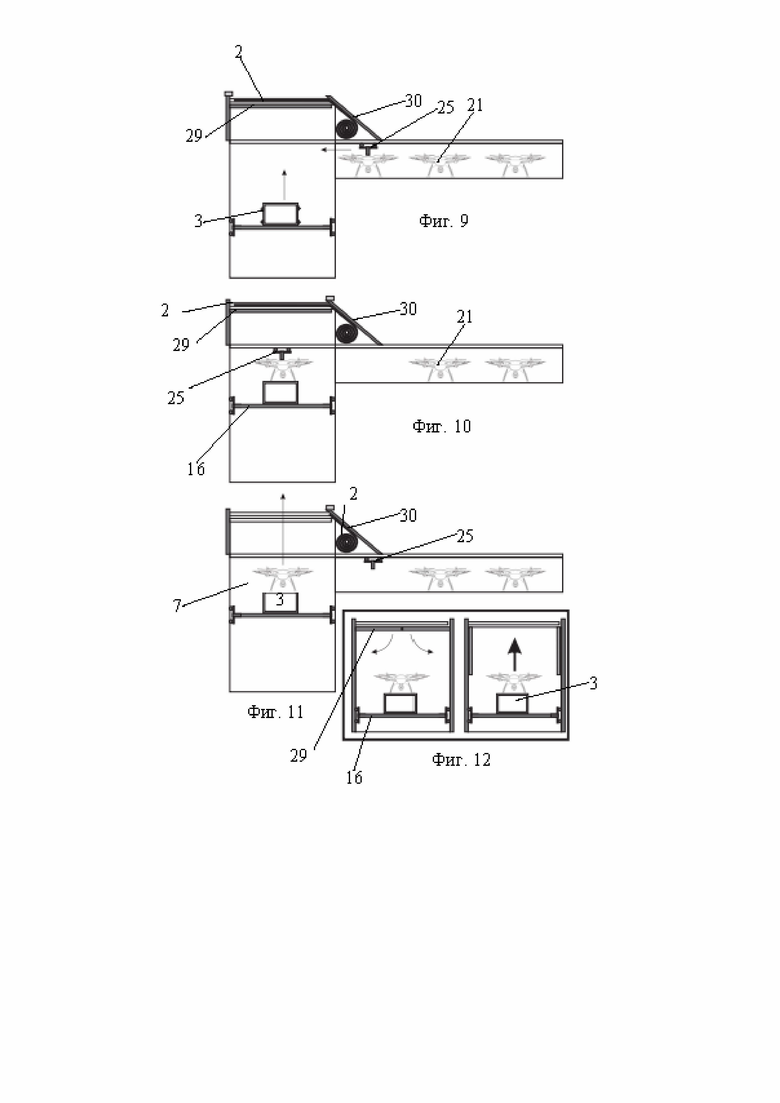
На фиг. 9, 10, 11, 12 схематично представлен процесс перемещения груза из узла складирования и хранения (II) по транспортировочной шахте с лифтовой платформой в потолочный отсек расположения воздушных роботов-курьеров робототехнического узла (III) и устройство выпускной зоны воздушных роботов- курьеров;
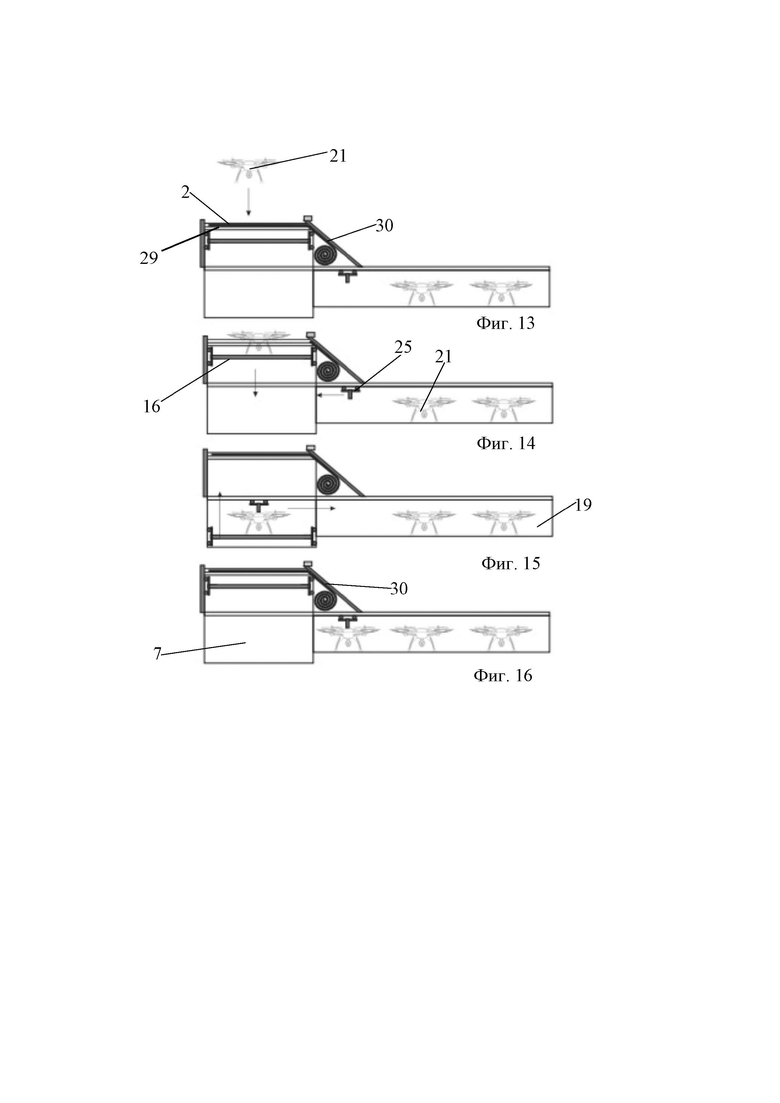
На фиг. 13, 14, 15, 16 схематично представлен процесс возврата в мобильный курьерский комплекс после доставки груза воздушного робота-курьера, его посадка в выпускную зону и процесс перемещения его с помощью второго роботизированного механизма, управляющего пространственным расположением воздушных роботов-курьеров, в потолочный отсек робототехнического узла (III) для хранения и подзарядки;
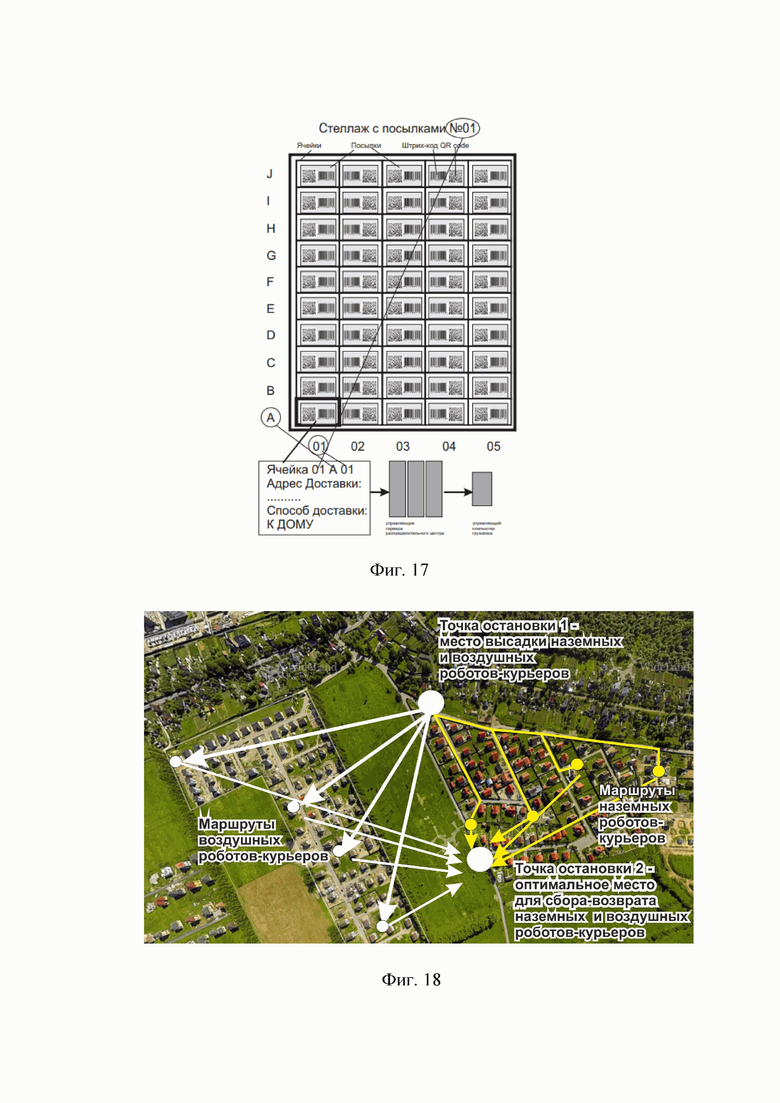
На фиг. 17 схематично представлен способ идентификации грузов в ячейках мобильного блока стеллажного типа и передачи информации об этом в центральный контроллер.
На фиг. 18 схематично представлен план высадки и маршрутов наземных и воздушных роботов-курьеров.
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение существующей технической проблемы. При описании примера выполнения для большей ясности используется конкретная терминология. Однако изобретение не предназначено для того, чтобы ограничиваться выбранной таким образом конкретной терминологией. Специалист в соответствующей области техники признает, что могут быть использованы другие эквивалентные части и механизмы либо алгоритмы, не отступающие от сферы применения изобретения.
На перечисленных фигурах представлены следующие части и элементы предлагаемого мобильного курьерского комплекса:
I - распределительный узел;
II - узел складирования и хранения;
III - робототехнический узел;
1 - транспортное средство;
2 - внешний люк;
3 - груз;
4 - мобильная конструкция стеллажного типа с ячейками;
5 - транспортировочная шахта;
6 - напольная шлюзовая часть;
7 - потолочная шлюзовая часть;
8 - двух-координатный рабочий стол;
9 - рабочая площадка стола;
10 - вертикально ориентированная стойка;
11 - робот-манипулятор;
12 - инструмент захвата и удержания грузов;
13 - шарообразная опора;
14 - основание робота манипулятора;
15 - выдвижной механизм робота-манипулятора;
16 - лифтовая платформа;
17 - сервоприводы;
18 - напольный отсек;
19 - потолочный отсек;
20 - наземный робот-курьер;
21 - воздушный робот-курьер;
22 - подсистема управления;
23 - ячейки;
24 - второй двух-координатный рабочий стол;
25 - малый робот-манипулятор;
26 - захватное приспособление малого робота-манипулятора;
27 - рабочие площадки стола ;
28 - трап для наземных роботов-курьеров;
29 - внутренний люк;
30 - барьеры для воздушных потоков;
31 - отдельный мобильный блок стеллажного типа;
32 - грузоподъемная машина;
33 - вторая горизонтальная перемычка;
34 - сервоприводные элементы;
35 - участок хранения и подзарядки воздушных роботов-курьеров;
36 - участок хранения и подзарядки наземных роботов-курьеров;
37 - загрузочный борт;
38 - первая горизонтальная перемычка;
39 - загрузочно-разгрузочный люк.
Итак, роботизированный мобильный курьерский комплекс включает размещенные в контейнере или кузове транспортного средства 1 структурно разделенные на функциональные в соответствии с назначением и связанные по ходу технологического процесса распределительный узел (I) с приемно-загрузочной и выпускной зонами, узел складирования и хранения (II), робототехнический узел (III), формирующие автоматизированную курьерскую структуру с возможностью централизованного и локального дистанционного контроля и управления структурой и ее автономными компонентами.
Распределительный узел (I) состоит из двух зон:
- - приемно-загрузочная,
- - выпускная.
Указанная приемно-загрузочная зона расположена в торцевой или боковой части контейнера или кузова транспортного средства 1 и включает по меньшей мере один загрузочный борт 37, открывающийся автоматически, через который происходит загрузка транспортного средства 1 отдельными мобильными блоками стеллажного типа 31.
Приемно-загрузочная зона может быть оснащена устройством идентификации (по типу устройства для сканирования штрих-кода) мобильных блоков стеллажного типа 31, идентифицирующим мобильные блоки стеллажного типа 31 с размещенными в их ячейках 23 грузами 3.
Указанная выпускная зона выполнена в виде транспортировочной шахты 5, внутри которой передвигается установленная в ней лифтовая платформа 16 (пневматическая, электрическая, гидравлическая или иная). При этом транспортировочная шахта 5 имеет сопряжения с переходными участками напольного и потолочного отсеков робототехнического узла (III), а также с переходным участком узла складирования и хранения (II).
Узел складирования и хранения (II) включает, по меньшей мере, одну мобильную конструкцию стеллажного типа 4, сформированную из мобильных блоков стеллажного типа 31 с ячейками 23, и расположенный над ней в потолочной части двух-координатный рабочий стол 8, первая горизонтальная перемычка 38 которого посредством сервоприводов 17 перемещается от торцевой части контейнера или кузова транспортного средства 1 к его передней части по направляющим, закрепленным вдоль потолочной части узла складирования и хранения II. К рабочей площадке 9 двух-координатного рабочего стола 8, которая имеет возможность перемещения по первой горизонтальной перемычке 38 за счет сервоприводов, крепится вертикальная стойка 10, которая служит основой для вертикального перемещения по ней робота-манипулятора 11, оснащенного инструментом захвата и удержания грузов 12 (зажим с боковыми охватными частями) и элементами компьютерного зрения (видеокамерами, лидарами и т.п.). Нижняя часть указанной вертикальной стойки 10 опирается на шарообразную опору 13 (колесо, шар, барабан, ролик и т.п.), которая упирается в пол узла складирования и хранения II. Таким образом, вертикальная стойка 10 двух-координатного рабочего стола 8, опираясь на шарообразную опору 13, может передвигаться по полу указанного узла, что вместе с верхним креплением к рабочей площадке 9 двух-координатного стола 8 образует устойчивую вертикальную систему, которая может перемещаться по всему помещению с достаточно высокой позиционной точностью. Как уже и было указано, конструкционно двух-координатный рабочий стол 8 состоит из рабочей площадки 9, имеющей сервоприводы 17, обеспечивающие перемещение по первой горизонтальной перемычке 38, которая также имеет сервоприводы 17, обеспечивающие перемещение по направляющим, закрепленным в потолочной части узла складирования и хранения II.
Своим основанием 14 робот-манипулятор 11 прикреплен на вертикальной стойке 10, что позволяет его основе передвигаться вверх и вниз. Дополнительно данная основа может вращаться вокруг оси вертикальной стойки 10. Такое вращение на 360 градусов позволяет роботу-манипулятору 11 достигать любой точки стеллажей и узла складирования и хранения II под любым углом. При этом дополнительно робот-манипулятор 11 оснащен выдвижным механизмом 15, который позволяет удлинять и сокращать длину манипулятора робота 11 и захватывать грузы 3, что обеспечивает дополнительную степень свободы. Любой груз 3, захваченный и удерживаемый роботом-манипулятором 11, может быть перемещен через переходный участок узла складирования и хранения (II) на лифтовую платформу 16 транспортировочной шахты 5. Далее груз 3 на лифтовой платформе 16, перемещающейся по транспортировочной шахте 5, которая имеет сопряжения с переходными участками напольного и потолочного отсеков робототехнического узла (III), может быть доставлен в указанные переходные участки напольного и потолочного отсеков робототехнического узла (III).
В узле складирования и хранения II, в непосредственной близости от транспортировочной шахты 5 распределительного узла (I), может быть установлен аппарат для автоматической упаковки грузов 3, где при необходимости может осуществляться их упаковка.
Аппарат для автоматической упаковки грузов может быть выполнен в виде работающего с помощью двигателя устройства упаковки стретч-пленкой, содержащего поворотную платформу, на которую устанавливается груз, подлежащий упаковке, вертикальное прижимное устройство, опускающееся сверху на груз для фиксации груза, имеющее ротационный механизм, выездную моторизированную каретку предварительного растяжения стретч-пленки, горизонтальный ротационный зажим, позволяющий перехватить и перевернуть груз в процессе упаковки.
Любой груз 3, захваченный и удерживаемый роботом-манипулятором 11, может быть перемещен на поворотную платформу аппарата для автоматической упаковки для последующей упаковки в соответствии с заложенным в аппарат для автоматической упаковки грузов программным обеспечением.
После завершения упаковки захваченный и удерживаемый роботом-манипулятором 11 упакованный груз 3, может быть перемещен через переходный участок узла складирования и хранения (II) на лифтовую платформу 16 транспортировочной шахты 5. Далее груз 3 на лифтовой платформе 16, перемещающейся по транспортировочной шахте 5, которая имеет сопряжения с переходными участками напольного и потолочного отсеков робототехнического узла (III), может быть доставлен в указанные переходные участки напольного и потолочного отсеков робототехнического узла (III).
Робототехнический узел III включает в себя напольные и потолочные отсеки 18 и 19 с участками хранения и подзарядки (36, 35) для интеллектуальных наземных и воздушных роботов-курьеров 20, 21, оснащенных интеллектуальной системой позиционирования и определения навигационного маршрута до места назначения, выполненных с возможностью взаимного информационного обмена с авторизованными пользователями для поддержания коммуникационного взаимодействия на определенном участке местности.
Управление и контроль над работой компонентов комплекса как целиком, так и по отдельности, осуществляется при помощи подсистемы управления 22, состоящей из аппаратного модуля с процессором, связанного посредством модуля беспроводной связи с центральным контроллером и облачным сервером хранения и передачи данных.
В предпочтительном варианте изобретения интеллектуальные воздушные роботы-курьеры 21 выполнены в виде дронов, использующих воздушные винты для перемещения. В качестве воздушных роботов-курьеров 21 могут быть применены известные разработки, в частности модели компании Aerones (см. https://rg.ru/2017/05/15/na-video-sniali-pervyj-pryzhok-cheloveka-s-drona.html).
Интеллектуальные наземные роботы-курьеры 20 оснащены ногами-манипуляторами, колесными парами или гусеничными движителями для передвижения по пересеченной местности. В качестве наземных роботов-курьеров 20 могут быть применены известные разработки, в частности роботы Marathon Robotics или Gita, Piaggio (см. http://robotrends.ru/robopedia/ulichnye-roboty-kurery).
Наземные 20 и воздушные 21 роботы-курьеры снабжены процессором для управления и обработки данных, модулем беспроводной связи, модулем глобального спутникового позиционирования и навигации, камерой кругового обзора, позволяющей изучать маршруты и идентифицировать получателей, лидарами и другими средствами позиционирования.
Каждая ячейка 23 для размещения и хранения грузов 3 отдельного мобильного блока стеллажного типа 31 обладает собственным идентификационным номером, который наносится на поверхность ячейки и заносится в память центрального контроллера и хранится на облачном сервере хранения и передачи данных. Ячейки установлены в отдельный мобильный блок стеллажного типа 31. На упаковку каждого груза 3 нанесен идентифицирующий указанный груз, информацию о получателе, адресе доставки и иные необходимые параметры код (например, штрих-код или qr-код). Это позволяет систематизировать информацию о хранящемся в каждой ячейке 23 грузе 3 и его адресате. Информация об идентифицированных ячейках 23 и находящихся в них грузах 3 заносится в память центрального контроллера в момент загрузки грузов 3 в ячейки 23 отдельного мобильного блока стеллажного типа 31 в сортировочном центре. Каждый отдельный мобильный блок стеллажного типа 31 также имеет собственный идентификационный номер, занесенный в память центрального контроллера и нанесенный на его поверхность.
Идентификационные данные о месте позиционирования отдельного мобильного блока стеллажного типа 31 в мобильной конструкции стеллажного типа 4 заносятся в память центрального контроллера в момент загрузки в мобильный курьерский комплекс отдельных мобильных блоков стеллажного типа 31 и формирования мобильной конструкции стеллажного типа 4 в узле складирования и хранения (II) через приемно-загрузочную зону.
Указанная информация передается роботу-манипулятору 11, который будет забирать необходимый груз 3 из определенной ячейки 23 и размещать его в отсеке-хранилище наземного робота-курьера 20 или на лифтовой платформе 16 для перемещения груза 3 по транспортировочной шахте 5 в переходные участки напольного и потолочного отсеков робототехнического узла (III) в целях дальнейшей передачи воздушному 21 или наземному 20 роботу-курьеру. При передаче груза 3 воздушному 21 или наземному 20 роботу-курьеру идентифицирующая груз 3 информация поступает в процессор для управления и обработки данных соответствующего наземного 20 или воздушного 21 робота-курьера, благодаря чему они получают информацию о конкретном грузе 3 и адресе его доставки.
По одному из вариантов исполнения инструмент захвата и удержания грузов 12 робота-манипулятора 11 может быть оснащен собственным устройством идентификации (например, сканер штрих- или qr- кодов, номеров, или видеокамера, позволяющая считывать коды или номера). Таким образом при направлении аппаратным модулем с процессором подсистемы управления 22 соответствующей команды робот-манипулятор 11, сканируя коды с упаковок груза 3 или поверхность отдельного мобильного блока стеллажного типа 31, может осуществить идентификацию груза 3 или автономного отдельного блока 31 в мобильной конструкции стеллажного типа 4.
Внутри узла складирования и хранения II и распределительного узла I грузы 3 перемещаются с помощью робота-манипулятора 11, который оснащен захватным механизмом в виде инструмента захвата и удержания 12. По факту прибытия мобильного курьерского комплекса в зону доставки подсистема управления 22 последовательно активирует команды роботу-манипулятора 11 об изъятии конкретного груза 3 из ячейки 23 мобильной конструкции стеллажного типа 4 и перемещении его на аппарат упаковки либо непосредственно в выпускную зону распределительного узла (I) с целью передачи на лифтовую платформу 16 или размещении его в грузовом отсеке наземного робота-курьера 20 в случае, если узел складирования и хранения связан с напольным отсеком 18 посредством отверстия с дверцей.
В случае передачи роботом-манипулятором 11 груза 3 на лифтовую платформу 16 аппаратный модуль подсистемы управления 22 направляет команду лифтовой платформе 16 осуществить перемещение груза 3 в переходный участок напольного или потолочного отсеков робототехнического узла (III) для осуществления наземной доставки или для осуществления воздушной доставки соответственно.
Наземные роботы-курьеры 20, размещенные на своих участках хранения и подзарядки 36 в напольном отсеке 18 робототехнического узла III, перемещаются по мере их активации аппаратным модулем подсистемы управления 22 внутри напольного отсека 18 за счет собственных устройств передвижения (ноги-манипуляторы, колесные пары или гусеничные движители) по специально выделенным для этого проходам, продвигаются к лифтовой платформе 16 либо в напольную шлюзовую часть 6.
Воздушные роботы-курьеры 21 перемещаются внутри потолочного отсека 19 с помощью малого робота манипулятора 25. Указанный малый робот-манипулятор 25 закреплен в верхней части потолочного отсека 19 на второй горизонтальной перемычке 33, движение которой по указанному отсеку осуществляется посредством второго двух-координатного подвижного стола 24. Конструкционно второй двух-координатный рабочий стол 24 состоит из рабочих площадок 27, перемещение которых по направляющим балкам вдоль потолочного отсека 19 обеспечивается посредством группы сервоприводных элементов 34.
Малый робот-манипулятор 25 установлен на второй горизонтальной перемычке 33 таким образом, чтобы за счет сервоприводов он мог перемещаться вдоль указанной перемычки. Таким образом обеспечивается возможность работы малого робота-манипулятора 25 во всех частях потолочного отсека 19. Малый робот-манипулятор 25 оснащен захватным стыковочным приспособлением 26 для удержания воздушных роботов-курьеров 21. Приспособление 26 имеет основание, телескопическую часть и собственно рабочую часть в виде стыковочных магнитных элементов (зажимов), действие которой контролируется подсистемой управления 22.
Малый робот-манипулятор 25 с помощью захватного приспособления 26 (может быть выполнено в виде зажима с боковыми охватными частями) забирает конкретный активированный аппаратным модулем подсистемы управления 22 воздушный робот-курьер 21 с участка своего хранения и подзарядки 35 и перемещает его в переходный участок потолочного отсека робототехнического узла (III), куда по транспортировочной шахте 5 доставляется груз 3, подлежащий доставке, с целью его последующего прикрепления к воздушному роботу-курьеру 21. После того, как захватный удерживающий механизм самого воздушного робота-курьера 21 осуществит прикрепление к нему груза 3, малый робот-манипулятор 25 отпускает данный воздушный робот-курьер 21 и возвращается за следующим.
Переходным участком потолочного отсека робототехнического узла (III) является потолочная шлюзовая часть 7. Она расположена в потолочном отсеке 19 робототехнического узла (III) непосредственно над транспортировочной шахтой 5 и содержит два люка. Первый (внутренний) люк 29 по команде аппаратного модуля подсистемы управления 22 открывается раздвижными механизмами, после чего лифтовая платформа 16 поднимает воздушный робот-курьер 21 с прикрепленным к нему грузом 3 к внешнему люку 2. В аппаратный модуль подсистемы управления 22 отправляется соответствующая команда о том, что воздушный робот-курьер 21 с грузом 3 готов к выпуску из транспортного средства 1, и далее по команде подсистемы управления 22 внешний люк 2 открывается для осуществления выпуска воздушного робота-курьера 21.
Лифтовая платформа 16 выполнена из немагнитного материала, например ударопрочного пластика, под которым оборудованы электромагниты, которые активируются непосредственно после завершения фиксации груза 3 воздушным роботом-курьером 21, подлежащим выпуску из мобильного курьерского комплекса, либо в момент посадки воздушного робота-курьера 21 на лифтовую платформу 16 после осуществления доставки груза 3 (то есть при взлете или посадке). Указанные электромагниты фиксируют воздушный робот-курьер 21, основание или нижние части которого оборудованы аналогичными электрическими магнитами, активируемыми в момент взлета и посадки. Внешний люк 2 потолочной шлюзовой части 7 выполнен по принципу роликовой шторы. На крыше мобильного курьерского комплекса перед внешним люком 2 установлены барьеры 30 для воздушных потоков, представляющие собой конструктивные элементы мобильного курьерского комплекса, выполненные из устойчивых к погодным условиям материалов (металл, пластик, иной полимер и т.п.) в форме защитных от воздушных потоков пластин возможно обтекаемой формы. Указанные барьеры предназначены для защиты воздушного робота-курьера 21 при взлете и посадке.
Нижняя часть воздушного робота-курьера 21 оборудована притягивающим груз 3 устройством (например, устройством с присосками либо магнитным устройством) и автоматическими зажимами, фиксирующими груз снизу. По одному из вариантов исполнения в нижней части воздушного робота-курьера 21 оборудован грузовой отсек (из металла или иного ударопрочного материала), внутри которого установлено притягивающее груз устройство (например, устройство с присосками либо магнитное устройство), при этом дно грузового отсека выполнено в виде автоматически задвигающихся дверок на магнитном или ином замке.
В верхней части наземного робота-курьера 20 оборудован грузовой отсек, выполненный в виде защищенного ящика (из металла или иного ударопрочного материала), который может быть разделен на несколько отсеков для одновременной доставки нескольких грузов. Каждый из отсеков отделен от других отсеков и закрывается специальной дверцей с замком (например, магнитным). Данный замок может быть открыт только получателем груза, посредством подачи команды с мобильного устройства через установленное программное обеспечение, или через такие каналы связи как Bluetooth, NFC и другие при непосредственном контакте получателя груза и наземного робота-курьера 20.
Информационный обмен воздушного 21 или наземного 20 робота-курьера с авторизованными пользователями, а также с подсистемой управления 22 осуществляется при помощи модуля беспроводной связи.
Груз 3 с лифтовой платформы 16 перемещается в грузовой отсек подошедшего активированного наземного робота-курьера 20 посредством исполнительного механизма в виде электропривода, оборудованного поршнем с толкателем и с захватным приспособлением, установленного на лифтовой платформе 16. Либо наземный робот-курьер 20 с помощью собственных устройств передвижения заходит на подошедшую лифтовую платформу 16, которая вместе с наземным роботом-курьером 20 перемещается к узлу складирования и хранения (II), где робот-манипулятор 11 помещает груз 3 в грузовой отсек прибывшего наземного робота-курьера 20. После чего наземный робот-курьер 20 с грузом 3 возвращается на лифтовой платформе 16 в напольный отсек 18 и перемещается в шлюзовую часть 6 выпускной зоны.
Переходным участком напольного отсека робототехнического узла (III) является напольная шлюзовая часть 6 выпускной зоны. Она расположена в напольном отсеке 18 робототехнического узла (III) в непосредственной близости от транспортировочной шахты 5 и содержит загрузочно-разгрузочный люк 39. Загрузочно-разгрузочный люк 39 открывается с помощью подъёмных механизмов при инициации данного процесса пользователем (для получения груза 3 непосредственно в мобильном курьерском комплексе) либо аппаратным модулем подсистемы управления 22 для выпуска наземного робота-курьера 20 с грузом 3.
Напольная шлюзовая часть 6 может быть оборудована дополнительным внутренним люком в целях недопущения проникновения посторонних предметов или лиц в мобильный курьерский комплекс. После того как наземный робот-курьер 20 за счет собственных устройств передвижения подходит в напольную шлюзовую часть 6 к загрузочно-разгрузочному люку 39 либо в напольную шлюзовую часть 6 с лифтовой платформы 16 посредством исполнительного механизма в виде электропривода, оборудованного поршнем с толкателем, перемещается груз 3, подлежащий выдаче непосредственно из мобильного курьерского комплекса, дополнительный внутренний люк закрывается подъёмными механизмами, отсекая тем самым пространство напольного отсека 18 с находящимся в нем роботом-курьером 20 или грузом 3 от напольной шлюзовой части 6. Таким образом после открытия загрузочно-разгрузочного люка 39 посторонние предметы или третьи лица не смогут проникнуть в напольный отсек 18 робототехнического узла (III).
Напольная шлюзовая часть 6 оборудована трапом 28 для выхода наземных роботов-курьеров 20, представляющим собой выдвижную платформу, которая может быть выполнена из твердого материала с электромагнитными элементами под ее нижней поверхностью для контроля входа/выхода наземных роботов-курьеров и может выдвигаться под уклоном.
Участок хранения и подзарядки воздушных роботов-курьеров 35 потолочного отсека 19 и участок хранения и подзарядки наземных роботов-курьеров 36 напольного отсека 18 робототехнического узла (III) включают, по меньшей мере, один слот или док-станцию для зарядки аккумуляторной батареи воздушного или наземного робота-курьера во время его нахождения в отсеке.
Комплекс может быть оснащен автономной системой питания, выполненной в виде стационарных электрических батарей-накопителей, солнечных батарей или ветровых установок, размещенных на крыше или на внешних стенках контейнера или кузова транспортного средства 1 и соединенных посредством кабельного соединения и преобразователя с док-станцией для зарядки батарей роботов-курьеров. Возможно кабельное соединение комплекса с внешними зарядными устройствами или электросетью.
Комплекс работает следующим образом.
Загрузка комплекса, как правило, происходит в сортировочных центрах, на складах транспортных компаний, специализированных погрузочно-разгрузочных площадках, на сортировочных авто- и ж/д станциях.
Заполненные грузом ячейки 23 помещают в мобильный блок стеллажного типа 31, предварительно отсканировав код, размещенный на упаковке груза 3, для последующей передачи полученных данных (вес, габаритные размеры, данные об отправителе и получателе, номер ячейки, в которую помещен груз) на удаленный сервер хранения и передачи данных.
Погрузка отдельных мобильных блоков 31 в комплекс осуществляется преимущественно при помощи грузоподъемных машин 32, в качестве которых могут использоваться вилочные погрузчики или роботы-манипуляторы. Для повышения уровня автоматизации во время грузоподъемных и грузо-распределительных работ может применяться робот-манипулятор с рукавом-захватом, оснащенным вакуумными присосками для захвата грузов за плоскую поверхность с наружной стороны.
После загрузки комплекса и начала движения центральный контроллер, используя информацию облачного сервера хранения и передачи данных, определяет длительность маршрута в целом и отдельных его участков, расчетное время прибытия в каждый пункт с учетом погодных условий и рельефа местности, длительность остановки в каждой точке с учетом времени, необходимого для осуществления курьерской доставки для текущего населенного пункта, благодаря чему может быть определено предполагаемое время доставки груза для каждого пользователя.
Центральный контроллер посредством беспроводной связи направляет расчетную информацию на облачный сервер хранения и передачи данных, откуда, в свою очередь, путем обращения к облачной базе данных направляет пользователям из списка грузополучателей уведомление в виде сообщений в установленном программном обеспечении, push сообщений, сообщений в различных мессенджерах, смс-сообщений или другими способами информирования о предполагаемом времени прибытия груза 3 и выбранном способе его доставки.
Преимуществом заявленного мобильного курьерского комплекса является отсутствие необходимости его разгрузки в строго отведенных для этого местах, как это требуется при традиционной доставке грузов автомобильным, железнодорожным или иным видом транспорта. В данном случае достаточно остановки в одной из максимально приближенных к населенному пункту разрешенных для парковки точек на трассе по маршруту следования для осуществления доставки при помощи наземных и воздушных роботов-курьеров. При этом перемещение комплекса внутрь населенного пункта возможно в случае, когда грузополучатель выбрал в качестве способа доставки самовывоз из определенной точки, либо в случае, когда это технически необходимо и оправдано. Например, выдача особо ценных грузов может осуществляться через напольную шлюзовую часть 6, оборудованную системами идентификации пользователя, при личном присутствии получателя.
Также выдача груза непосредственно через напольную шлюзовую часть 6 в мобильном комплексе осуществляется в случае невозможности доставки грузов 3 конкретному получателю при помощи роботов-курьеров.
Наземные 20 и воздушные 21 роботы-курьеры снабжены процессором для управления и обработки данных, модулем беспроводной связи, модулем глобального спутникового позиционирования и навигации, камерой кругового обзора, позволяющей изучать маршруты и идентифицировать получателей, лидарами и другими средствами позиционирования.
После того как курьерский комплекс доставлен в зону доставки грузов 3, аппаратный модуль подсистемы управления 22 даёт последовательные команды роботу-манипулятору 11 об изъятии конкретного груза 3 из ячейки мобильной конструкции стеллажного типа 4, в которой он хранится, и передаче его на аппарат для автоматической упаковки грузов 3 (в случае его установки в курьерском комплексе и необходимости осуществления упаковки), расположенный в узле складирования и хранения II в непосредственной близости от транспортировочной шахты 5 распределительного узла (I), где после завершения упаковки захваченный и удерживаемый роботом-манипулятором 11 упакованный груз 3, может быть перемещен из узла складирования и хранения II в распределительный узел I, в частности, в его выпускную зону - на лифтовую платформу 16 транспортировочной шахты 5. Либо аппаратный модуль подсистемы управления 22 даёт последовательные команды роботу-манипулятору 11 об изъятии конкретного груза 3 из ячейки мобильной конструкции стеллажного типа 4, в которой он хранится, и передаче его непосредственно из узла складирования и хранения II в распределительный узел I, исключая упаковку груза 3. Далее аппаратный модуль подсистемы управления 22 даёт команды каждому соответствующему наземному роботу-курьеру 20 о его активации и направлении к лифтовой платформе 16.
Наземный робот-курьер 20 после активации с помощью собственных устройств передвижения и исполнительных механизмов передвигается от точки своего нахождения в напольном отсеке 18 мобильного курьерского комплекса (от конкретного участка хранения и подзарядки наземных роботов-курьеров 36) к лифтовой платформе 16. Маршруты передвижения роботов внутри мобильного курьерского комплекса заранее занесены в в подсистему управления 22 и в процессоры роботов-курьеров. Маршрут выбирается аппаратным модулем подсистемы управления 22 мобильного курьерского комплекса и сообщается роботу-курьеру в зависимости от точки хранения последнего.
В узле складирования и хранения II, в непосредственной близости от транспортировочной шахты 5 распределительного узла (I) в зависимости от варианта: доставка груза 3 или выдача груза 3 получателю на месте - робот-манипулятор 11 устанавливает груз 3 в грузовой отсек прибывшего на лифтовой платформе 16 наземного робота-курьера 20 либо помещает груз 3 на лифтовую платформу 16 для последующей передачи последнего в напольную шлюзовую часть 6.
Вариант доставка груза получателю. Груз 3 устанавливается роботом-манипулятором 11 в грузовой отсек прибывшего на лифтовой платформе 16 наземного робота-курьера 20, крышка грузового отсека наземного робота-курьера 20 закрывается по команде аппаратного модуля подсистемы управления 22, и в процессор наземного робота-курьера 20 передаётся сигнал о завершении процесса погрузки груза 3. Лифтовая платформа 16 возвращает наземный робот-курьер 20 в напольный отсек 18 робототехнического узла II, и наземный робот-курьер 20 перемещается к напольной шлюзовой части 6 выпускной зоны. Либо груз 3, помещенный роботом-манипулятором 11 на лифтовую платформу 16, перемещается к напольному отсеку 18 и передается с лифтовой платформы 16 в грузовой отсек наземного робота-курьера 20, подошедшего в напольную шлюзовую часть 6, посредством исполнительного механизма лифтовой платформы 16 в виде электропривода, оборудованного поршнем с толкателем. Крышка грузового отсека наземного робота-курьера 20 закрывается по команде аппаратного модуля, и в процессор наземного робота-курьера 20 передаётся сигнал о завершении процесса погрузки груза 3.
Далее подсистема управления 22 проводит проверку на предмет отсутствия посторонних предметов в напольной шлюзовой части 6, далее активирует загрузочно-разгрузочный люк 39 на открытие, при необходимости активизирует трап 28 для выхода наземных роботов-курьеров на выдвижение и даёт команду наземному роботу-курьеру 20 выйти наружу. Внутри шлюзовой части 6 установлено средство наблюдения (цифровая камера). Кроме того, в напольной части шлюзовой части 6 могут устанавливаться датчики/весы, которые сигнализируют аппаратному модулю подсистемы управления 22 о наличии посторонних предметов зоне шлюза.
Вариант выдача груза получателю на месте. Пользователь подходит к мобильному курьерскому комплексу и с помощью мобильного приложения либо сканирования специального кода либо другого способа осуществления верификации отправляет в подсистему управления 22 команду о выдаче соответствующего груза 3. Активированный подсистемой управления 22 робот-манипулятор 11 забирает в узле складирования и хранения (II) груз 3 из ячейки 23 и помещает его на лифтовую платформу 16. Лифтовая платформа 16 по транспортировочной шахте 5 перемещает груз 3 к напольному отсеку 18 робототехнического узла II. Груз 3 передается с лифтовой платформы 16 в напольную шлюзовую часть 6 посредством исполнительного механизма лифтовой платформы 16 в виде электропривода, оборудованного поршнем с толкателем. Указанное перемещение груза 3 может быть выполнено иным способом, например, по направляющим, расположенным под уклоном к напольной шлюзовой части 6.
Подсистема управления 22 проводит проверку на предмет отсутствия посторонних предметов в напольной шлюзовой части 6, далее активирует загрузочно-разгрузочный люк 39 на открытие, и получатель груза забирает груз 3 из напольной шлюзовой части 6.
После выхода наземного робота-курьера 20 наружу или после получения груза 3 получателем из напольной шлюзовой части 6 загрузочно-разгрузочный люк 39 закрывается по команде подсистемы управления 22. И процедура выпуска каждого наземного робота-курьера 20 с грузом 3 повторяется столько раз, сколько в зоне доставки грузов должно быть доставлено грузов наземными роботами-курьерами 20.
После того как будет выпущен последний наземный робот-курьер 20 конкретной зоны доставки, аппаратный модуль подсистемы управления 22 активизирует трап 28 на движение внутрь мобильного курьерского комплекса (на задвижку трапа 28).
По возвращении каждого наземного робота-курьера 20 после доставки груза 3 аналогичные процедуры в обратном порядке повторяются по команде подсистемы управления 22 для принятия каждого наземного робота-курьера 20 в мобильный курьерский комплекс и передвижения его в участок хранения и подзарядки наземных роботов-курьеров 36.
Выдача груза непосредственно через потолочную шлюзовую часть 7 осуществляется следующим образом.
После того как мобильный курьерский комплекс доставлен в зону доставки грузов подсистема управления 22 даёт последовательные команды малому роботу-манипулятору 25 и соответствующему воздушному роботу-курьеру 21 об их активации и направлении в потолочную шлюзовую часть 7. Малый робот-манипулятор 25 с помощью захватного приспособления 26 забирает конкретный активированный аппаратным модулем подсистемы управления 22 воздушный робот-курьер 21 с участка своего хранения и подзарядки 35 и далее перемещает воздушный робот-курьер 21, удерживая его сверху, с участка своего хранения и подзарядки 35 в мобильном курьерском комплексе в потолочную шлюзовую часть 7. Робот-манипулятор 11 забирает груз 3, подлежащий доставке согласно своей очереди и маршруту доставки, из соответствующей ячейки 23 мобильной конструкции стеллажного типа 4. Аппаратный модуль подсистемы управления 22 дает команду роботу-манипулятору 11 о передаче указанного груза 3 на аппарат для автоматической упаковки грузов 3 (в случае его установки в курьерском комплексе и необходимости осуществления упаковки), расположенный в узле складирования и хранения II в непосредственной близости от транспортировочной шахты 5 распределительного узла (I), где после завершения упаковки захваченный и удерживаемый роботом-манипулятором 11 упакованный груз 3, может быть перемещен из узла складирования и хранения II в распределительный узел I, в частности, в его выпускную зону - на лифтовую платформу 16 транспортировочной шахты 5. Либо аппаратный модуль подсистемы управления 22 дает последовательные команды роботу-манипулятору 11 об изъятии конкретного груза 3 из ячейки 23 мобильной конструкции стеллажного типа 4 и передаче его непосредственно из узла складирования и хранения II в распределительный узел I, исключая упаковку груза 3.
Далее аппаратный модуль подсистемы управления 22 даёт команду лифтовой платформе 16 переместиться к переходному участку узла складирования и хранения (II). Робот-манипулятор 11 устанавливает груз 3 на лифтовую платформу 16 и по команде подсистемы управления 22 лифтовая платформа 16 перемещает груз 3 к потолочному отсеку 19 робототехнического узла III в потолочную шлюзовую часть 7 для осуществления прикрепления груза к ожидающему там воздушному роботу-курьеру 21. После того, как груз 3 прикреплен и удерживается воздушным роботом-курьером 21, малый робот-манипулятор 25 отпускает воздушный робот-курьер 21 и отправляет команду о завершении процесса прикрепления груза 3. Далее подсистема управления 22 проверяет отсутствие посторонних предметов на внутреннем люке 29 (в случае, если внутренний люк 29 оборудован датчиками/весами, которые сигнализируют подсистеме управления 22 о наличии посторонних предметов на внутреннем люке 29) и по команде аппаратного модуля подсистемы управления 22 внутренний люк 29 открывается раздвижными механизмами. После чего лифтовая платформа 16 поднимает воздушный робот-курьер 21 с прикрепленным к нему грузом 3 к внешнему люку 2. В подсистему управления 22 отправляется соответствующая команда о том, что воздушный робот-курьер 21 с грузом 3 готов к выпуску из транспортного средства 1. Далее аппаратный модуль подсистемы управления 22 проверяет отсутствие посторонних предметов на внешнем люке 2 и активирует внешний люк 2 на открытие. Внутри шлюзовой части 6 и непосредственно на внешней части транспортного средства 1 установлены средства наблюдения (цифровые камеры), получая данные от которых, подсистема управления 22 с помощью программных средств анализирует отсутствие или наличие посторонних предметов.
Далее аппаратный модуль подсистемы управления 22 активирует перемещение лифтовой платформы 16 на уровень крыши мобильного курьерского комплекса. После осуществления проверки погодных условий аппаратный модуль подсистемы управления 22 дает команду о деактивации электромагнитного крепления воздушного робота-курьера 21 к лифтовой платформе 16 и активирует воздушный робот-курьер 21 на осуществление вылета. После вылета воздушного робота-курьера 21, лифтовая платформа 16 опускается из потолочной шлюзовой части 7, внешний люк 2 и внутренний люк 29 по мере опускания лифтовой платформы 16 последовательно закрываются по команде аппаратного модуля подсистемы управления 22. Соответствующий алгоритм действий повторяется пока необходимое количество воздушных роботов-курьеров 21 с грузами не будет выпущено из мобильного курьерского комплекса.
По возвращении каждого воздушного робота-курьера 21 после доставки при непосредственном приближении к мобильному курьерскому комплексу воздушный робот- курьер 21 отправляет сигналы аппаратному модулю подсистемы управления 22 о готовности приземлиться и переместиться в мобильный курьерский комплекс. По команде аппаратного модуля подсистемы управления 22 внешний люк 2 и внутренний люк 29 последовательно открываются. С помощью средств наблюдения аппаратный модуль подсистемы управления 22 проверяет отсутствие посторонних предметов на лифтовой платформе 16, дает команду лифтовой платформе 16 на перемещение на уровень с крышей мобильного курьерского комплекса и направляет воздушному роботу-курьеру 21 сигнал о возвращении в мобильный курьерский комплекс. Далее воздушный робот-курьер 21 опускается на лифтовую платформу 16, происходит магнитная фиксация указанного робота-курьера к лифтовой платформе 16. После этого аппаратный модуль подсистемы управления 22 даёт команду лифтовой платформе 16 опуститься в потолочную шлюзовую часть 7, и о последовательном закрытии внешнего люка 2 и внутреннего люка 29. Воздушный робот-курьер 21 забирается малым роботом-манипулятором 25 и перемещается на участка своего хранения и подзарядки 35. Процесс повторяется для принятия в мобильный курьерский комплекс каждого возвращающегося после доставки воздушного робота-курьера 21.
В случае, если доставка груза 3 по какой-то причине не была осуществлена получателю, по возвращении в мобильный курьерский комплекс наземного или воздушного робота-курьера с грузом, подсистема управления 22 на основании информации, полученной от центрального контроллера и облачного сервера хранения и передачи данных, осуществляет процедуру открепления груза 3 от наземного или воздушного робота-курьера и возврата его в ячейку 23 мобильной конструкции стеллажного типа 4 по алгоритму отправки груза 3 только осуществляющемуся в обратном порядке.
В частности, наземный робот-курьер 20 по трапу 28 возвращается в напольную шлюзовую часть 6, подсистема управления закрывает загрузочно-разгрузочный люк 39 и направляет лифтовую платформу 16 к напольному отсеку 18. Далее наземный робот-курьер 20 заходит на лифтовую платформу 16 и по транспортировочной шахте 5 перемещается к узлу складирования и хранения (II). Робот-манипулятор забирает груз 3 из грузового отсека наземного робота-курьера 20 и возвращает неполученный груз 3 в соответствующую ячейку 23 мобильной конструкции стеллажного типа 4.
Таким же образом воздушный робот-курьер 21 с неполученным грузом 3 опускается на лифтовую платформу 16, происходит магнитная фиксация указанного робота-курьера к лифтовой платформе 16. После этого аппаратный модуль подсистемы управления 22 даёт команду лифтовой платформе 16 опуститься в потолочную шлюзовую часть 7, и о последовательном закрытии внешнего люка 2 и внутреннего люка 29. Аппаратный модуль подсистемы управления 22 направляет команду воздушному роботу-курьеру 21 отсоединить груз 3. Далее воздушный робот-курьер 21 забирается малым роботом-манипулятором 25 и перемещается на участка своего хранения и подзарядки 35. Лифтовая платформа 16 по транспортировочной шахте 5 перемещает груз 3 к узлу складирования и хранения (II). Робот-манипулятор забирает груз 3 с лифтовой платформы 16 и возвращает неполученный груз 3 в соответствующую ячейку 23 мобильной конструкции стеллажного типа 4.
Как указывалось ранее, снаружи комплекс может быть оснащен, по меньшей мере, одной камерой видеонаблюдения, синхронизированной с аппаратным модулем подсистемы управления 22. Поступающие с камеры данные обрабатываются аппаратным модулем подсистемы управления 22 и позволяют осуществлять безопасный запуск воздушных роботов-курьеров 21, убедившись в отсутствии естественных и искусственных преград в виде проводов, веток деревьев и т.п., а также обрабатывать поступающие с камеры данные для формирования и хранения на удаленном сервере карты местности с учетом рельефа, которая может использоваться при формировании следующего маршрута и определения расчетного времени прибытия в каждую из его точек.
Кроме того, камера с возможностью видеозаписи и модуль беспроводной связи позволяют осуществлять видеозапись передачи груза 3, которая отправляется на удаленный сервер для ее хранения в течение заданного количества времени.
Помимо прочего, камера может быть использована для видеосъемки при попытке хищения воздушного или наземного робота-курьера и передачи трансляционных данных в режиме реального времени правоохранительным органам.
Воздушные или наземные роботы-курьеры доставляют грузы по заданным адресам, при этом внешний сервер хранения и передачи данных направляет пользователям из списка грузополучателей уведомление в виде сообщений в установленном программном обеспечении, push сообщений, сообщений в различных мессенджерах, смс-сообщений или другими способами информирования о предполагаемом времени прибытия груза и выбранном способе его доставки, а после получения груза - уведомление о завершении доставки.
В качестве опции комплекс может быть оснащен дополнительным внешним роботом-манипулятором для сбора неработоспособных беспилотных транспортных средств.
Предлагаемое изобретение может найти широкое применение в промышленности, в частности в сфере доставок грузов и корреспонденции в отдаленные от цивилизации участки местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| КОНСТРУКЦИОННО РАССРЕДОТОЧЕННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЦИКЛИЧНОГО ПРОИЗВОДСТВА ПИЩЕВОЙ ПРОДУКЦИИ ПОСЛОЙНОГО СОДЕРЖАНИЯ | 2021 |
|
RU2763145C1 |
| КОММУНИЦИРУЮЩАЯ С ПОЛЬЗОВАТЕЛЕМ ИНТЕЛЛЕКТУАЛЬНАЯ САМОХОДНАЯ ТЕЛЕЖКА ДЛЯ ПОКУПОК | 2023 |
|
RU2797605C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ КУХОННАЯ МАШИНА ДЛЯ СКОРОСТНОГО ПРИГОТОВЛЕНИЯ АВТОРСКИХ ПРОДУКТОВЫХ ЗАКАЗОВ | 2020 |
|
RU2752818C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| ПИЩЕВАЯ СТАНЦИЯ САМООБСЛУЖИВАНИЯ С АВТОМАТИЗИРОВАННЫМИ ЭКСПЛУАТАЦИОННЫМИ ЦИКЛАМИ ПОВЫШЕННОЙ ПРОИЗВОДИТЕЛЬНОСТИ | 2020 |
|
RU2763143C1 |
| ДВУХУРОВНЕВАЯ ПИЩЕВАЯ СИСТЕМА ДЛЯ ПОЭТАПНОГО ПРОИЗВОДСТВА БЛЮД РЕСТОРАННОГО ТИПА | 2020 |
|
RU2768885C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
Изобретение относится к области многокомпонентных робототехнических систем, которые спроектированы для работы в области логистики и могут быть использованы для доставки товаров. Роботизированный мобильный курьерский комплекс включает размещенные в контейнере или кузове транспортного средства (1) структурно разделенные на функциональные в соответствии с назначением и связанные по ходу технологического процесса распределительный узел с приемно-загрузочной и выпускной зонами, узел складирования и хранения и робототехнический узел, формирующие автоматизированную курьерскую структуру, управление и контроль над которыми осуществляется при помощи подсистемы управления. Приемно-загрузочная зона содержит загрузочный борт, а выпускная зона - лифтовую платформу, передвигающуюся по транспортировочной шахте, имеющей сопряжения с переходными участками напольного (16) и потолочного (15) отсеков робототехнического узла и с переходным участком узла складирования и хранения и по меньшей мере один люк. Узел складирования и хранения включает по меньшей мере одну мобильную конструкцию стеллажного типа с ячейками и оборудованным в потолочной части подвижным двухкоординатным столом, соединенным посредством вертикально ориентированной стойки с подвижной шарообразной опорой, размещенной в напольной части. На вертикальной стойке установлен подвижный робот-манипулятор, для захвата грузового объекта и последующего позиционного контакта с неотделяемым оборудованием и/или воздушными и наземными роботами-курьерами. Напольный (16) и потолочный (15) отсеки робототехнического узла оснащены посадочными сервисными участками для базирования наземных и воздушных роботов-курьеров, каждый из которых имеет взаимодействующую с указанной подсистемой управления интеллектуальную систему позиционирования и определения навигационного маршрута до места назначения, предусматривающую возможностью взаимного информационного обмена с авторизованными пользователями. Обеспечивается повышение автоматизации и производительности. 4 з.п. ф-лы, 18 ил.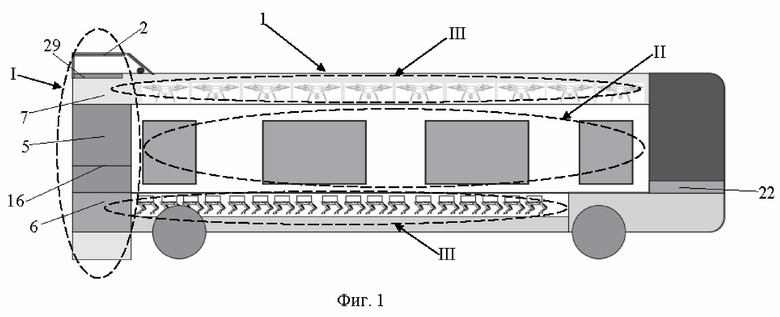
1. Роботизированный мобильный курьерский комплекс, включающий размещенные в контейнере или кузове транспортного средства структурно разделенные на функциональные в соответствии с назначением и связанные по ходу технологического процесса распределительный узел (I) с приемно-загрузочной и выпускной зонами, узел складирования и хранения (II) и робототехнический узел (III), формирующие автоматизированную курьерскую структуру, управление и контроль над которыми осуществляется при помощи подсистемы управления, состоящей из аппаратного модуля с процессором, связанного посредством модуля беспроводной связи с центральным контроллером и облачным сервером хранения и передачи данных, при этом:
- приемно-загрузочная зона распределительного узла (I) содержит загрузочный борт, а выпускная зона распределительного узла (I) содержит лифтовую платформу, передвигающуюся по транспортировочной шахте, имеющей сопряжения с переходными участками напольного и потолочного отсеков робототехнического узла (III), а также с переходным участком узла складирования и хранения (II), и по меньшей мере один люк,
- узел складирования и хранения (II) включает по меньшей мере одну мобильную конструкцию стеллажного типа с ячейками и оборудованным в потолочной части подвижным двухкоординатным столом, соединенным посредством вертикально ориентированной стойки с подвижной шарообразной опорой, размещенной в напольной части, при этом на указанной вертикальной стойке установлен подвижный робот-манипулятор, сконфигурированный для захвата грузового объекта с целью его последующего позиционного контакта с неотделяемым оборудованием и/или воздушными и наземными роботами-курьерами,
- упомянутые напольный и потолочный отсеки робототехнического узла (III) оснащены посадочными сервисными участками для базирования указанных наземных и воздушных роботов-курьеров, каждый из которых имеет взаимодействующую с указанной подсистемой управления интеллектуальную систему позиционирования и определения навигационного маршрута до места назначения, предусматривающую возможностью взаимного информационного обмена с авторизованными пользователями.
2. Роботизированный мобильный курьерский комплекс по п. 1, отличающийся тем, что распределительный узел (I) оснащен аппаратом для автоматической упаковки грузов.
3. Роботизированный мобильный курьерский комплекс по п. 1, отличающийся тем, что лифтовая платформа распределительного узла (I) оснащена исполнительным механизмом в виде электропривода, оборудованного поршнем с толкателем и с захватным приспособлением.
4. Роботизированный мобильный курьерский комплекс по п. 1, отличающийся тем, что лифтовая платформа распределительного узла (I) оснащена устройством видеонаблюдения или фотофиксации.
5. Роботизированный мобильный курьерский комплекс по п. 1, отличающийся тем, что узел складирования и хранения (II) связан с напольным отсеком робототехнического узла (III) с наземными роботами-курьерами посредством отверстия с дверцей с автоматическим запорным механизмом.
| CN 207345649 U, 11.05.2018 | |||
| US 20190161190 A1, 30.05.2019 | |||
| CN 112561623 A, 26.03.2021 | |||
| УСТАНОВКА ДЛЯ ФОРМОВАНИЯ МОНОЛИТНЫХ ОБЪЕМНЫХ БЛОКОВ | 0 |
|
SU186320A1 |
| WO 2019014023 A1, 17.01.2019. | |||

