Изобретение относится к машиностроению, а именно к механизмам, преобразующим вращательное движение в возвратно-поступательное, и может быть использовано в конструкциях, в которых применение кривошипно-ползунных и четырехзвенных кулисных механизмов нецелесообразно или невозможно из-за ограниченных габаритов.
Известны типовые схемы планетарных редукторов, описанные в книге И.И. Артоболевского, Теория механизмов, Издательство Наука, Главная редакция физико-математической литературы, Москва, 1967 г., страницы 234- 237, рис. 344, рис. 345, рис. 346 и на странице 615, рис. 692. Учитывая то, что в планетарных редукторах имеются подвижные оси, редуктор с внутренним зацеплением и паразитным колесом можно использовать для преобразования вращательного движения водила в возвратно-поступательное движение выходного вала колеса. Для чего необходимо ввести второе паразитное колесо и обеспечить колесу два движения, направленных в противоположные стороны: вращение вокруг собственной оси и вращение вокруг оси вращения водила.
В устройствах преобразования вращательного движения в возвратно-поступательное и наоборот, описанных в патентах РФ №2471099, опубликованном 27.12.2012 г., МПК F16H 19/02, F16H 21/16 и в №2499934, опубликованном 27.11.2013 г., МПК F16H 19/02, F16H 21/16 для преобразования движения используются зубчатые колеса внутреннего зацепления и сателлиты, к которым жестко присоединены планки и к ним шарнирно присоединены шатуны, своими вторыми концами шарнирно соединенные с поршнями, которые и совершают возвратно-поступательное движение. Но при этом происходит смещение центра поршня от оси зубчатого колеса внутреннего зацепления на величину длины шатуна, что увеличивает габариты устройства и не позволяет разработать компактную конструкцию, в которой центр ползуна совершал бы симметричные возвратно-поступательные движения относительно оси зубчатого колеса внутреннего зацепления.
Известен также планетарный механизм для преобразования движения, описанный в патенте РФ №2416747, опубликованном 27.02.2009 г., МПК F16H 19/02. Возвратно-поступательные движения совершаются после выхода сателлитов из зацепления с половинками венцов, находящихся на подвижной детали, но, при этом, возвратно-поступательные движения подвижной детали происходят дискретно, а не непрерывно.
Из известных механизмов, наиболее близким по технической сущности является механизм компенсации, описанный в техническом описании 1.723.078-01-ТО аэрофотоаппарата ПА-1, выпущенном в 1976 г. на Красногорском заводе им. С.А. Зверева. Механизм компенсации состоит из неподвижного основания с зубчатым венцом внутреннего зацепления, составляющего с большим диском, на котором нарезан наружный зубчатый венец, первый шарикоподшипник, а большой диск с малым диском, на котором нарезан наружный зубчатый венец, образуют второй шарикоподшипник, ось которого смещена относительно оси первого шарикоподшипника на величину эксцентриситета е. В малом диске выполнено отверстие для крепления объектива, смещенное относительно зубчатого венца малого диска на величину эксцентриситета е. На большом диске закреплены две сцепленные между собой паразитные шестерни, одна из которых сцепляется с внутренним зубчатым венцом основания, а другая с наружным зубчатым венцом малого диска. Электродвигатель через редуктор, зубчатое колесо которого находится в зацеплении с наружным зубчатым венцом большого диска, приводит большой диск во вращение. При вращении большого диска, выполняющего роль водила планетарного редуктора, закрепленная на нем одна из паразитных шестерен обкатывается по внутреннему зубчатому венцу неподвижного основания, приводя во вращение вторую паразитную шестерню, которая находится в зацеплении с зубчатым венцом малого диска, выполняющего роль центрального колеса с выходным валом планетарного редуктора. Вторая паразитная шестерня приводит во вращение малый диск, роль выходного вала которого выполняет объектив, установленный в отверстии, смещенном относительно зубчатого венца малого диска на величину эксцентриситета е. Кинематика механизма компенсации рассчитана так, что большой и малый диски вращаются в разные стороны с одинаковой угловой скоростью. Объектив, вращаясь вокруг своей оси, получает поступательное движение, которое используется для осуществления компенсации движения изображения в панорамном аппарате в дополнение к развороту аэрофотопленки. Но, при изготовлении отверстий, смещенных на величину эксцентриситета относительно наружного диаметра, из-за допусков у большого диска величина эксцентриситета е может отличаться от величины эксцентриситета е у малого диска. И соответственно, перемещение оптической оси объектива не будет прямолинейным при различных углах поворота большого и малого дисков, а будет колебаться относительно прямой линии, соединяющей крайние точки перемещения.
Задачей изобретения является достижение прямолинейного перемещения оси выходного звена, совершающего возвратно-поступательное движение, при вращении центрального зубчатого колеса с наружным зубчатым венцом, на котором оно установлено.
Технический результат - повышение точности прямолинейного перемещения при преобразовании вращательного движения в возвратно-поступательное за счет возможности корректировки положения выходного валика.
Поставленная задача достигается тем, что привод, состоящий из неподвижного цилиндрического колеса с зубчатым венцом внутреннего зацепления, жестко закрепленного в корпусе, в котором соосно с неподвижным цилиндрическим колесом с зубчатым венцом внутреннего зацепления, установлено водило, с закрепленными на нем сцепленными между собой двумя паразитными шестернями, одна из которых установлена с возможностью обкатывания по внутреннему зубчатому венцу неподвижного цилиндрического колеса, приводя, при вращении водила, в движение другую шестерню, сцепленную с центральным зубчатым колесом с наружным зубчатым венцом, установленным в эксцентрическое отверстие водила и вращающимся в сторону противоположную направлению вращения водила, причем число зубьев цилиндрического колеса с внутренним зубчатым венцом в два раза больше числа зубьев центрального зубчатого колеса с наружным зубчатым венцом, в отличие от известного, на центральном зубчатом колесе с наружным зубчатым венцом установлен выходной валик, выполненный с отверстиями в основании в местах крепления и имеющего зазор между крепежными винтами и отверстиями в основании для перемещения по центральному зубчатому колесу с наружным зубчатым венцом и изменения расстояния между осью выходного валика и осью центрального зубчатого колеса с наружным зубчатым венцом таким образом, чтобы это расстояние было равным величине эксцентриситета отверстия в водиле для преобразования вращательного движения водила с эксцентрическим отверстием и вращательного движения центрального зубчатого колеса с наружным зубчатым венцом, установленного в эксцентрическое отверстие водила, в прямолинейное перемещение выходного валика.
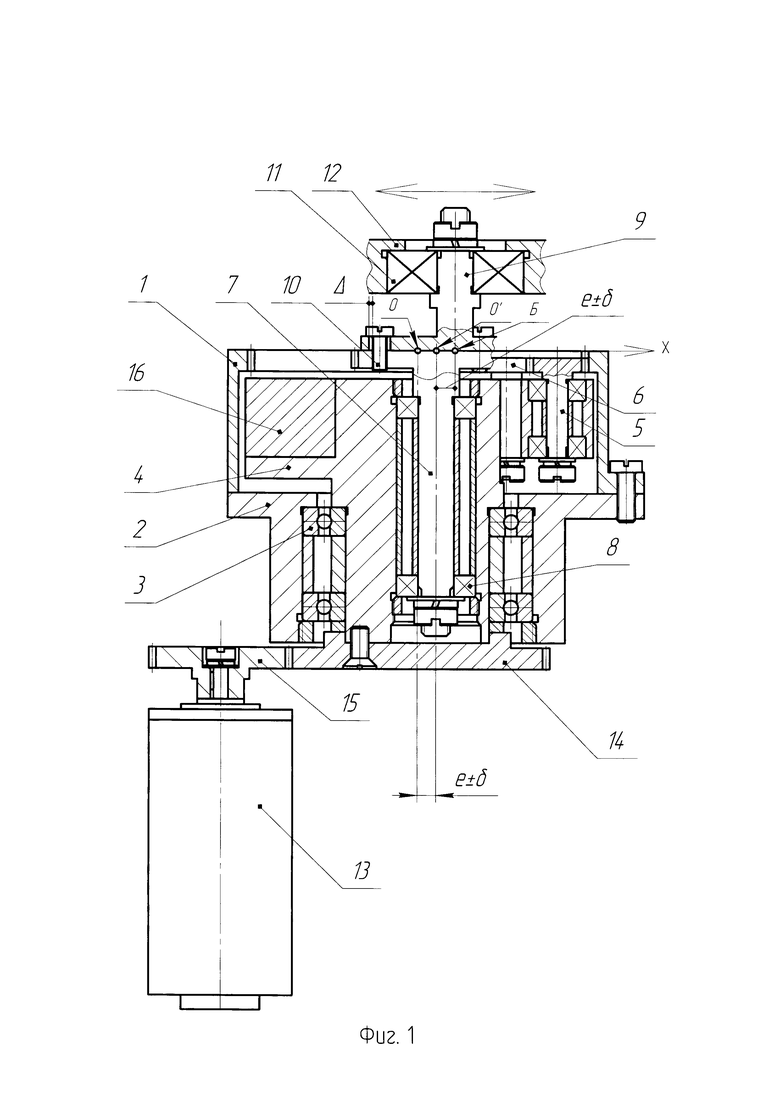
Изобретение поясняется чертежами, где - на фиг. 1 изображен привод в разрезе;
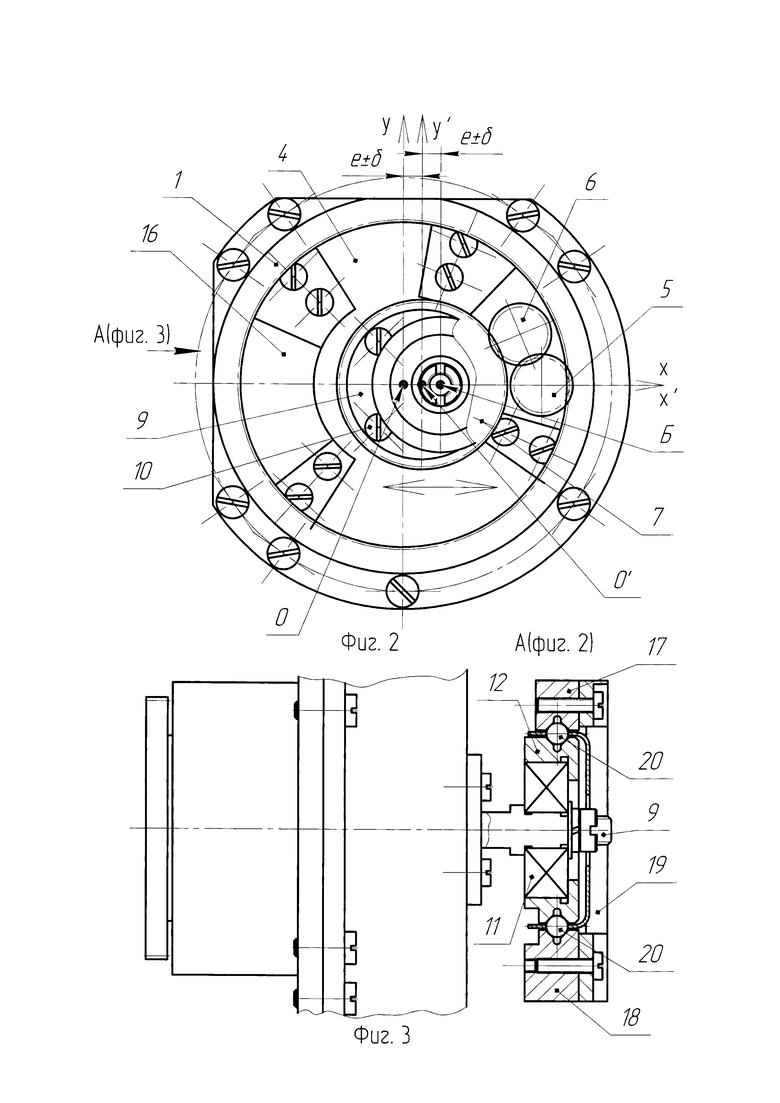
- на фиг. 2 показан вид сверху на выходной валик в одном из двух крайних положений;
- на фиг. 3 показан насыпной подшипник выходного валика;
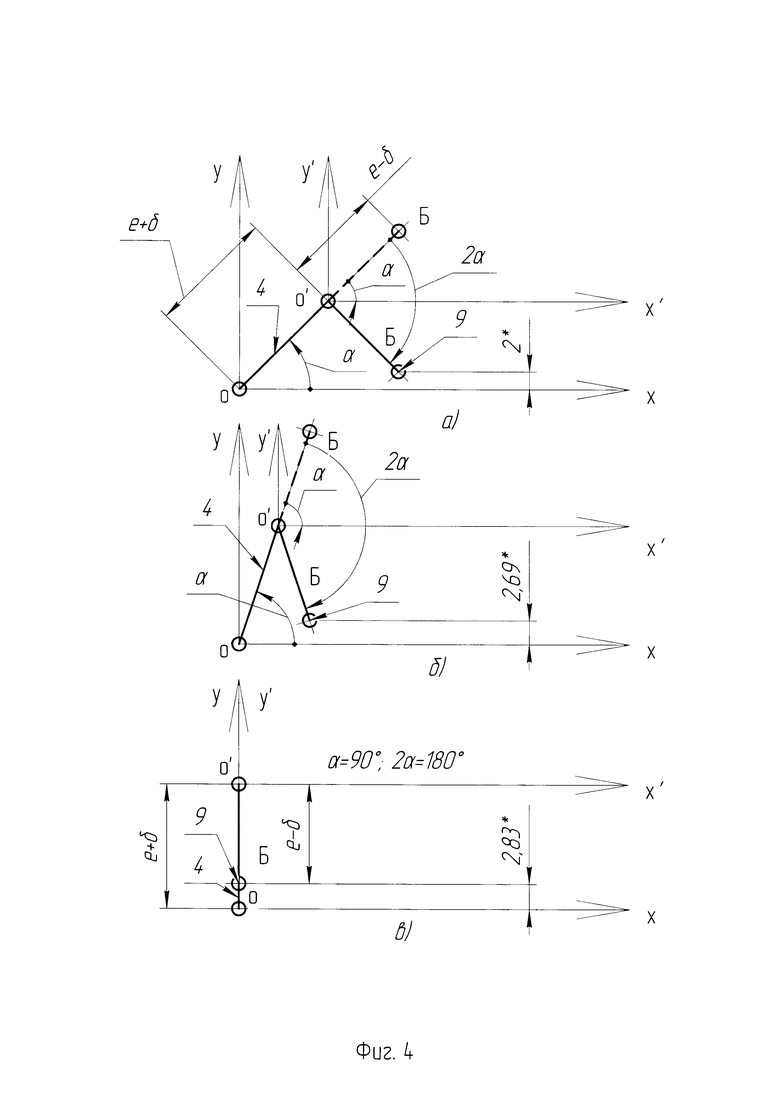
- на фиг. 4 показаны графики зависимости положения оси выходного валика
при неравенстве эксцентриситетов, то есть:
e+δ≠e-δ
где:- е - номинальное значение эксцентриситета;
- δ - величина допуска изготовления.
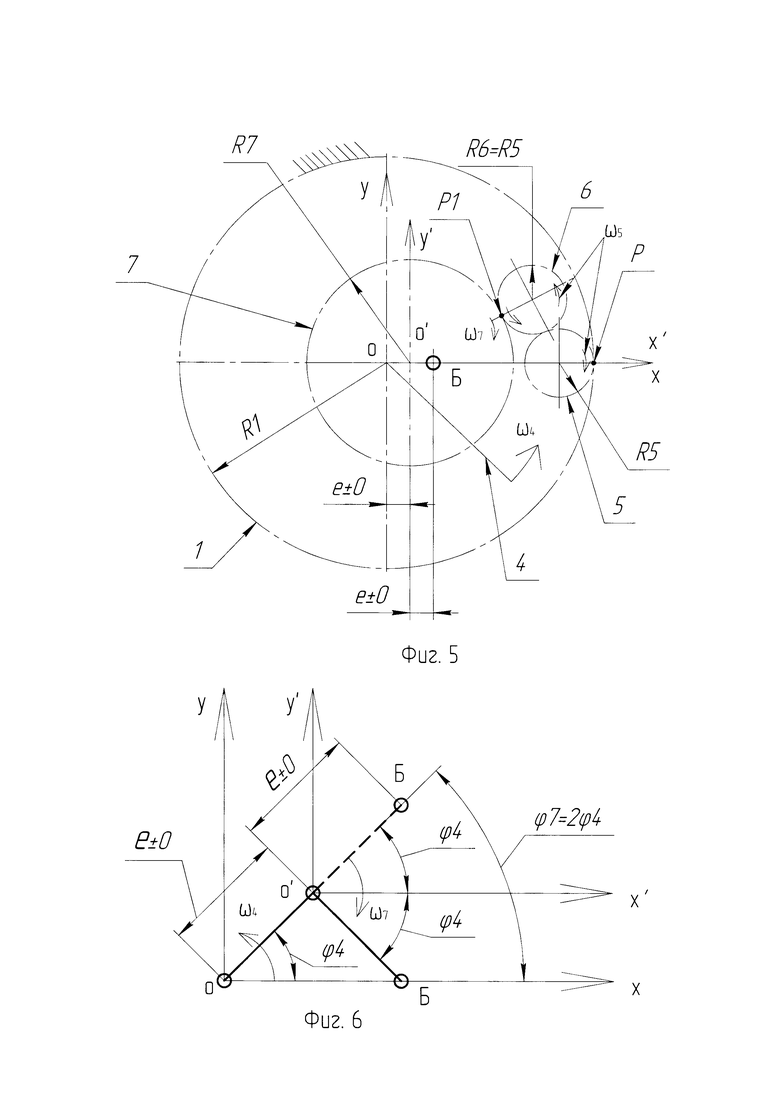
- на фиг. 5 показаны радиусы окружностей зацепления - начальных окружностей зубчатых колес, точки касания Р и Р1 окружностей зацепления паразитных шестерен с окружностями зацепления цилиндрического колеса с внутреннем зубчатым венцом и центрального зубчатого колеса с наружным зубчатым венцом, при равных значениях эксцентриситетов, см. И.И. Артоболевский, Теория механизмов, Издательство «НАУКА», Главная редакция физико-математической литературы, Москва, 1967 г., страница 534;
- на фиг. 6 графически показано положение оси выходного валика при равных значениях эксцентриситетов;
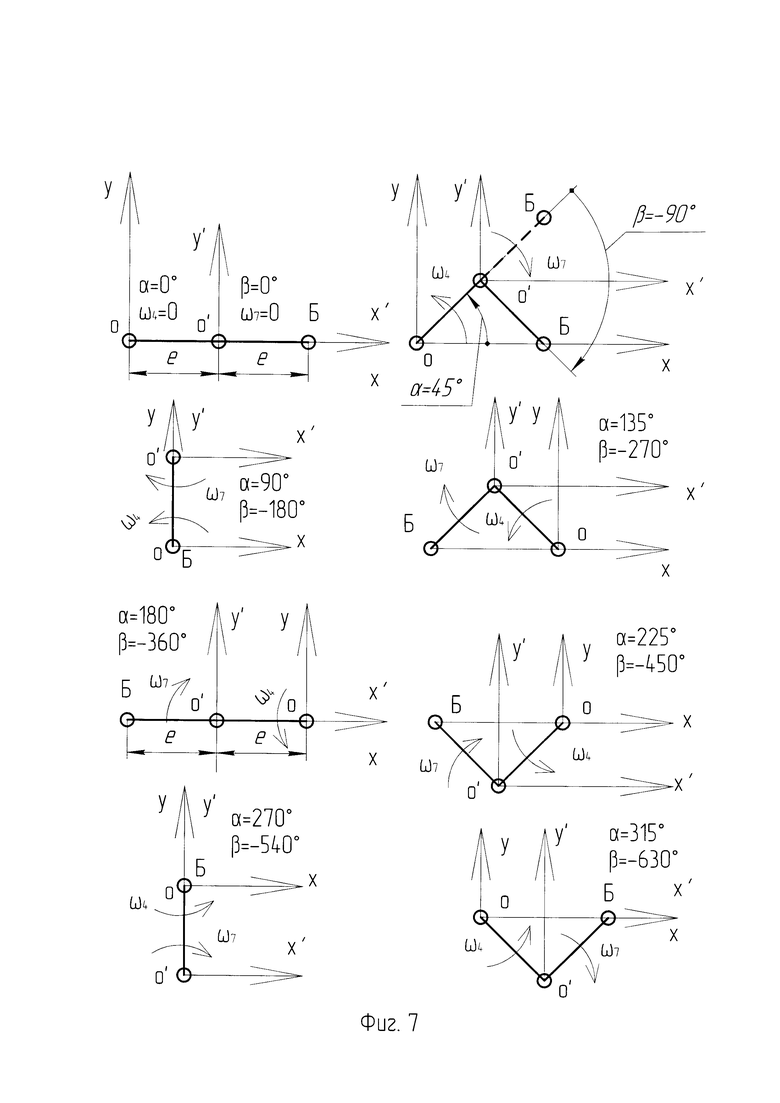
- на фиг. 7 показано перемещение оси выходного валика при повороте водила от 0° последовательно через каждые 45° от прежнего положения;
Привод (фиг. 1) состоит из неподвижного цилиндрического колеса 1 с зубчатым венцом внутреннего зацепления, жестко закрепленном в корпусе 2, внутри которого на подшипниках 3 соосно с неподвижным цилиндрическим колесом 1 установлено с возможностью вращения водило 4, которое выполнено с эксцентрическим отверстием. На водиле 4 закреплены сцепленные между собой паразитные шестерни 5 и 6. Первая паразитная шестерня 5 сцепляется с внутренним зубчатым венцом неподвижного цилиндрического колеса 1, вторая паразитная шестерня 6 сцепляется с наружным зубчатым венцом центрального зубчатого колеса 7, перемещающегося вместе с водилом 4 и вращающимся вокруг собственной оси в подшипниках 8, установленных в эксцентрическое отверстие водила 4. Вторая паразитная шестерня 6 вращает центральное зубчатое колесо 7 с наружным зубчатым венцом вокруг его оси, в сторону противоположную направлению вращения водила 4. Кроме того, на центральном зубчатом колесе 7 с наружным зубчатым венцом установлен выходной валик 9, имеющий зазор А между крепежными винтами 10 и отверстиями в основании выходного валика 9. Зазор А позволяет перемещать выходной валик и закрепленные на нем подшипник 11 и ползун 12, так, чтобы расстояние «е±δ» от оси центрального зубчатого колеса 7 с наружным зубчатым венцом до оси выходного валика 9 было равно эксцентриситету «е±δ» отверстия в водиле 4. Ось вращения центрального зубчатого колеса 7 с наружным зубчатым венцом совпадает с осью эксцентрического отверстия в водиле 4 и смещена относительно оси неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом на такое же расстояние «е±δ». Двигатель 13 приводит во вращение водило 4 с помощью прикрепленного к нему зубчатого колеса 14, сцепленного с зубчатым колесом 15, закрепленном на двигателе 13. Кроме того, на водиле 4 закреплен балансировочный груз 16, уравновешивающий массу сборки с паразитными шестернями 5 и 6, а также массу смещенных на величину эксцентриситета e±δ центрального зубчатого колеса 7 с наружным зубчатым венцом и подшипниками 8.
В крайнем положении перемещения выходного валика 9 точка Б на его оси, точка О' оси центрального зубчатого колеса 7 с наружным зубчатым венцом находятся на координатной оси ОХ, где начало координат О - точка, лежащая на оси водила 4, совпадающей с осью неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом.
Вращение центрального зубчатого колеса 7 с наружным зубчатым венцом вокруг собственной оси (фиг. 2) происходит в подвижной системе координат X'O'Y', где начало координат О' - точка О', находящая на оси центрального зубчатого колеса 7 с наружным зубчатым венцом и лежащая в плоскости X'O'Y'. Центральное зубчатое колесо 7 с наружным зубчатым венцом и подвижная система координат X'O'Y' вращаются вместе с водилом 4 в неподвижной системе координат XOY вокруг оси неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом, где начало координат О - точка О, находящая на оси водила 4, совпадающей с осью неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом и лежащая в плоскостях X'O'Y' и XOY. При выравнивании эксцентриситетов e±δ=e±δ точка Б на оси выходного валика 9 совершает возвратно-поступательное прямолинейное перемещение по координатной оси ОХ на расстояние ±2е от начала координат О.
Ползун 12 (фиг. 3), образует с направляющими 17 и 18, закрепленными на неподвижной пластине 19 и с шариками 20, установленными между ползуном 12 и направляющими 17 и 18, насыпной подшипник, в котором ползун 12 перемещается выходным валиком 9 и совершает возвратно-поступательное прямолинейное движение. К ползуну 12 может крепиться любой узел, перемещение которого должно быть прямолинейным.
Выравнивание эксцентриситетов производится для того, чтобы при перемещении выходного валика 9 не происходило смещение точки Б на его оси (фиг. 2) от координатной оси ОХ. При отклонении (колебании) выходного валика 9 от прямолинейного перемещения по координатной оси ОХ, вместе с ним перемещается подшипник 11 и ползун 12 и, соответственно, таким же образом перемещается любой узел, закрепленный на ползуне 12.
На фиг. 4 графически показано положение точки Б на оси выходного валика 9 при разных углах поворота водила 4 при неравенстве размеров: (е+δ)≠(е-δ). При разных углах поворота водила 4 (фиг. 4а, фиг. 4б, фиг. 4в) точка Б оси выходного валика 9 смещается на разное расстояние от координатной оси ОХ, то есть выходной валик 9 совершает колебательное движение. На фиг. 4: а - угол между осью ОХ и ОБ, 2а - угол поворота центрального зубчатого колеса 7 с наружным зубчатым венцом вокруг собственной оси (вокруг точки О') в подвижной системе координат X'O'Y'.
На фиг. 5 указаны, направления движения водила 4, паразитных шестерней 5, 6 и центрального зубчатого колеса 7 с наружным зубчатым венцом. Из закона преобразования вращений известно, что в точке касания Р неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом и паразитной шестерней 5 линейная скорость паразитной шестерни 5 равна линейной скорости водила 4. Линейная скорость V в точке касания определяется по формуле: V=ωR, то есть в точке касания Р имеем:
ω4R1=ω5R5,
где: - ω4- угловая скорость водила 4,
- R1- радиус окружности зацепления неподвижного цилиндрического колеса 1,
- ω5 - угловая скорость паразитной шестерни 5,
- R5- радиус окружности зацепления паразитной шестерни 5.
Угловая скорость паразитной шестерни 5 равна:
ω5=ω4(R1/R5).
Паразитная шестерня 5 одинакова с паразитной шестерней 6 и соответственно равны их угловые скорости, то есть
ω5=ω6,
где: - ω6 - угловая скорость паразитной шестерни 6;
В точке касания Р1 паразитной шестерни 6 и центрального зубчатого колеса 7 с наружным зубчатым венцом равны их линейные скорости:
ω6R6=ω7R7,
где: - R6 - радиус окружности зацепления паразитной шестерни 6;
- ω7 - угловая скорость центрального зубчатого колеса 7 с наружным зубчатым венцом;
- R7 - радиус окружности зацепления центрального зубчатого колеса 7 с наружным зубчатым венцом.
Подставляя в формулу ω5 вместо ω6 и R5 вместо R6 получим
ω5R5=ω7R7
так как угловая скорость паразитной шестерни 5 равна
ω5=ω4(R1/R5)
подставляя ω5 получим
ω4R1=ω7R7
или для углов поворота:
ϕ4 R1=ϕ7R7,
где: - ϕ7 - угол поворота центрального зубчатого колеса 7 с наружным зубчатым венцом;
- ϕ4 - угол поворота водила 4.
На фиг. 6 графически показано условие перемещения точки Б на оси выходного валика 9 по координатной оси ОХ: для прямолинейного перемещения точки Б угол поворота центрального зубчатого колеса 7 с наружным зубчатым венцом вокруг собственной оси (вокруг точки О') должен быть равен:
ϕ7=2ϕ4
Подставляя
ϕ7=2 ϕ4
в формулу для углов поворота
ϕ7 R7=ϕ4 R1
получим:
2 ϕ4 R7=ϕ4 R1
Откуда
R1=2R7
Отсюда следует, что окружность зацепления с радиусом R1 и, соответственно, диаметр окружности зацепления и число зубьев неподвижного цилиндрического колеса 1 с зубчатым венцом внутреннего зацепления должны быть в два раза больше, чем у центрального зубчатого колеса 7 с наружным зубчатым венцом, чтобы перемещение точки Б оси выходного валика 9 было прямолинейным.
Переходя к формуле:
ω7R7=ω4R1
и подставляя значение R1=2R7 получим:
ω7R7=ω42R7,
отсюда следует, что угловая скорость ω7 у центрального зубчатого колеса 7 с наружным зубчатым венцом в два раза больше чем угловая скорость ω4 водила 4:
ω7=2 ω4
На фиг. 7 показано последовательное перемещение точки Б на оси выходного валика 9 по координатной оси ОХ при повороте водила 4 на углы α от 0° последовательно через каждые 45° от прежнего положения и соответствующий этим углам поворот центрального колеса 7 с наружным зубчатым венцом на углы β в противоположную сторону,
где: - О - точка на оси вращения водила 4;
- О' - точка на оси вращения центрального колеса 7 с наружным зубчатым венцом;
Работает устройство следующим образом. Вращение от двигателя 13 с зубчатым колесом 15 передается на зубчатое колесо 14, закрепленное на водиле 4 (фиг. 1). Водило 4, вращается в подшипниках 3 вместе с центральным зубчатым колесом 7 с наружным зубчатым венцом и двумя паразитными шестернями 5 и 6 сцепленными между собой. Паразитная шестерня 5, обкатывается по внутреннему зубчатому венцу неподвижного цилиндрического колеса 1, с которым находится в зацеплении и вращает паразитную шестерню 6. Паразитная шестерня 6 находится в зацеплении и вращает центральное зубчатое колесо 7 с наружным зубчатым венцом. Ось вращения водила 4 совпадает с осью неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом, а центральное зубчатое колесо 7 с наружным зубчатым венцом вращается в подшипниках 8, установленных в отверстии водила 4, смещенном на расстояние е относительно его оси вращения. Точка Б на оси выходного валика 9, установленного на центральном зубчатом колесе 7 с наружным зубчатым венцом, всегда перемещается по координатной оси ОХ (фиг. 2), без перемещения подшипника 11 и соответственно ползуна 12 в направлении перпендикулярном перемещению выходного валика 9. Это обеспечивается перемещением выходного валика 9 в зазоре Δ (фиг. 1) и установкой расстояния от точки Б на оси выходного валика 9 до точки О' оси центрального зубчатого колеса 7 с наружным зубчатым венцом равным расстоянию от точки О' до точки О на оси водила 4, а также поворотом в противоположную сторону от поворота водила 4 центрального зубчатого колеса 7 с наружным зубчатым венцом на двойной угол ϕ7=2 ϕ4 при повороте водила 4 на угол ϕ4 (фиг 6). Двойной угол 2 ϕ4 поворота центрального зубчатого колеса 7 с наружным зубчатым венцом обеспечивается отношением числа зубьев цилиндрического колеса 1 с внутренним зубчатым венцом и центрального зубчатого колеса 7 с наружным зубчатым венцом.
Число зубьев неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом должно быть в два раза больше числа зубьев центрального зубчатого колеса 7 с наружным зубчатым венцом, чтобы обеспечить поворот центрального зубчатого колеса 7 с наружным зубчатым венцом, вокруг его собственной оси вращения на угол в два раза больше, чем угол поворота водила 4 вокруг его оси вращения. Центральное зубчатое колесо 7 с наружным зубчатым венцом совершает два движения:
- вращение вокруг оси неподвижного цилиндрического колеса 1 с внутренним зубчатым венцом вместе с водилом 4 и закрепленными на нем паразитными шестернями 5 и 6;
- вращение в противоположном направлении вокруг собственной оси при вращении шестерней 5 и 6, одна из которых обкатывается по внутреннему зубчатому венцу неподвижного цилиндрического колеса 1, приводя во вращение вторую паразитную шестерню 6, которая в свою очередь вращает центральное зубчатое колесо 7 с наружным зубчатым венцом.
Сложение вращений в противоположные стороны центрального зубчатого колеса 7 с наружным зубчатым венцом приводит к тому, что ось выходного валика 9 установленного на нем совершает прямолинейное перемещение. Прямолинейное перемещение без колебаний относительно прямой линии, достигается при равенстве расстояний е. То есть смещение оси выходного валика 9, установленного на центральном зубчатом колесе 7 с наружным зубчатым венцом, относительно его оси вращения должно быть равно величине эксцентриситета отверстия в водиле 4, что обеспечивается перемещением выходного валика 9.
Таким образом, достигнут технический результат, а именно: за счет возможности корректировки положения выходного валика, установленного на центральном зубчатом колесе с наружным зубчатым венцом, позволяющей устанавливать расстояние от оси вращения колеса с наружным зубчатым венцом до оси выходного валика равным эксцентриситету отверстия водилы и получать перемещение выходного валика прямолинейным, возвратно-поступательным, без совершения колебаний относительно прямой линии, соединяющей крайние точки перемещения, и симметричным относительно оси вращения водила.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный механизм и планетарная передача на его основе | 2018 |
|
RU2677952C1 |
| Планетарная передача с предварительной ступенью | 2022 |
|
RU2782006C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПЛАВУЧАЯ ПРИБРЕЖНАЯ ГИДРОВОЛНОВАЯ ЭЛЕКТРОСТАНЦИЯ | 2014 |
|
RU2626188C2 |
| СУДНО С ГИДРОВОЛНОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2014 |
|
RU2603813C2 |
| РОТОРНАЯ ОБЪЁМНАЯ МАШИНА | 2018 |
|
RU2701306C1 |
| МАЯТНИКОВЫЙ ГИДРОВОЛНОВОЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА | 2012 |
|
RU2615288C2 |
| ПРИВОД ВРАЩАЮЩЕГОСЯ КОНВЕЙЕРА АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 1999 |
|
RU2172457C2 |
| ЭКСЦЕНТРИКОВЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2007 |
|
RU2338103C1 |
Изобретение относится к машиностроению. Привод состоит из неподвижного цилиндрического колеса с зубчатым венцом внутреннего зацепления, в котором соосно с неподвижным цилиндрическим колесом с зубчатым венцом внутреннего зацепления установлено водило с закрепленными на нем сцепленными между собой двумя паразитными шестернями, одна из которых установлена с возможностью обкатывания по внутреннему зубчатому венцу неподвижного цилиндрического колеса, приводя, при вращении водила, в движение другую шестерню, сцепленную с центральным зубчатым колесом с наружным зубчатым венцом, установленным в эксцентрическое отверстие водила и вращающимся в сторону, противоположную направлению вращения водила. Число зубьев цилиндрического колеса с внутренним зубчатым венцом в два раза больше числа зубьев центрального зубчатого колеса с наружным зубчатым венцом, при этом на центральном зубчатом колесе с наружным зубчатым венцом установлен выходной валик, выполненный с отверстиями в основании в местах крепления и имеющий зазор между крепежными винтами и отверстиями в основании для перемещения по центральному зубчатому колесу с наружным зубчатым венцом и изменения расстояния между осью выходного валика и осью центрального зубчатого колеса с наружным зубчатым венцом таким образом, чтобы это расстояние было равным величине эксцентриситета отверстия в водиле. Обеспечивается повышение точности прямолинейного перемещения. 7 ил.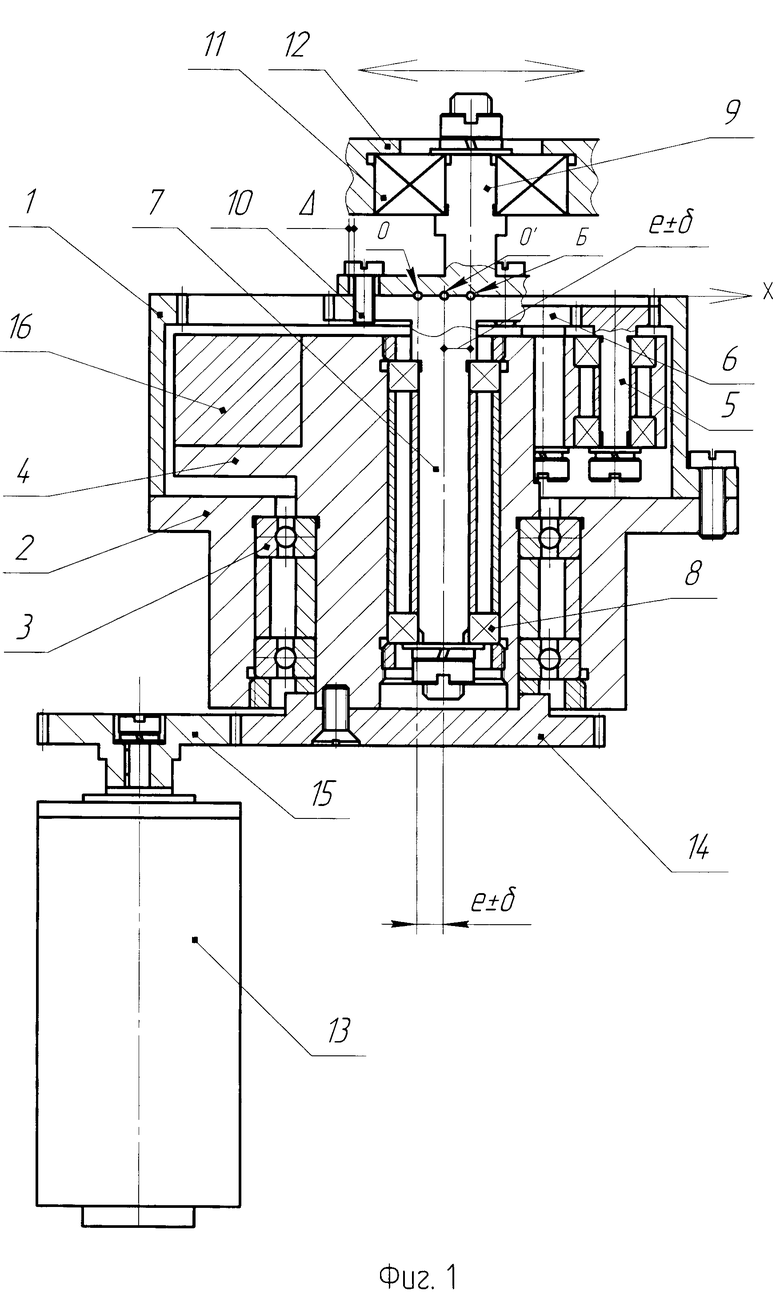
Привод, состоящий из неподвижного цилиндрического колеса с зубчатым венцом внутреннего зацепления, жестко закрепленного в корпусе, в котором соосно с неподвижным цилиндрическим колесом с зубчатым венцом внутреннего зацепления установлено водило с закрепленными на нем сцепленными между собой двумя паразитными шестернями, одна из которых установлена с возможностью обкатывания по внутреннему зубчатому венцу неподвижного цилиндрического колеса, приводя, при вращении водила, в движение другую шестерню, сцепленную с центральным зубчатым колесом с наружным зубчатым венцом, установленным в эксцентрическое отверстие водила и вращающимся в сторону, противоположную направлению вращения водила, а число зубьев цилиндрического колеса с внутренним зубчатым венцом в два раза больше числа зубьев центрального зубчатого колеса с наружным зубчатым венцом, отличающийся тем, что на центральном зубчатом колесе с наружным зубчатым венцом установлен выходной валик, выполненный с отверстиями в основании в местах крепления и имеющий зазор между крепежными винтами и отверстиями в основании для перемещения по центральному зубчатому колесу с наружным зубчатым венцом и изменения расстояния между осью выходного валика и осью центрального зубчатого колеса с наружным зубчатым венцом таким образом, чтобы это расстояние было равным величине эксцентриситета отверстия в водиле для преобразования вращательного движения водила с эксцентрическим отверстием и вращательного движения центрального зубчатого колеса с наружным зубчатым венцом, установленным в эксцентрическое отверстие водила, в прямолинейное перемещение выходного валика.
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ И НАОБОРОТ | 2010 |
|
RU2471099C2 |
| Складная коробка | 1929 |
|
SU15705A1 |
| CN 108071761 A, 25.05.2018. | |||

