Изобретение относится к области электротехники и может быть использована в электроэнергетических системах подводных аппаратов с большой автономностью и дальностью плавания.
Известен контактный (проводной) способ энергообеспечения подводных аппаратов, реализованный в полезной модели «Система электроснабжения телеуправляемого подводного аппарата с судна-носителя» (Патент РФ №46611 опубл. 10.07.2005 г., Б.И. №19) с помощью устройства, содержащего входной преобразователь, вход которого соединен с судовой электрической сетью, инверторное устройство, силовой трансформатор, кабель-трос, питающий конец которого соединен с согласующим трансформатором первого подводного блока системы, установленного на заглубителе. Второй подводный блок, установленный на подводном аппарате, включает второй согласующий трансформатор, первичными обмотками связанный с плавучим кабелем, передающим питание и сигналы телеуправления к аппаратуре подводного аппарата, а вторичными обмотками - с первым и вторым блоками управляемых выпрямителей, выходы которых подключены к клеммам питания аппаратуры подводного аппарата, второй выход одного из указанных блоков управляемых выпрямителей соединен с конвертором постоянного тока, выход которого также подключен к клеммам питания аппаратуры подводного аппарата.
При реализации контактного (проводного) способа энергообеспечения НПА передачи электрической энергии с судна - носителя на борт подводного аппарата осуществляется по электрическому кабелю и имеет следующие недостатки: ограничены глубина погружения, автономность и дальность плавания подводного аппарата, ограничена также и величина электрической энергии, передаваемой на борт подводного аппарата по электрическому кабелю.
Известен бесконтактный (беспроводной) способ энергообеспечения подводных аппаратов без электрического кабеля между судном - носителем и подводным аппаратом, реализованный с помощью «Устройства для бесконтактной передачи электроэнергии на подводный объект» (Патент РФ №2502170, опубл. 20.12.2013 Б.И. №35), которое содержит однофазный автономный инвертор напряжения повышенной частоты, блок управления этим инвертором, входной конденсатор и первичную обмотку трансформатора повышенной частоты, а также расположенные на подводном объекте в блоке выпрямителя вторичную обмотку трансформатора, однофазный мостовой неуправляемый выпрямитель, сглаживающий реактор и выходной конденсатор, при этом обмотки трансформатора повышенной частоты снабжены в первом варианте плоскими магнитными экранами, а во втором - чашечными сердечниками и центральными стержнями.
При реализации бесконтактного (беспроводного) способа энергообеспечения передача электрической энергии на борт подводного аппарата осуществляется через немагнитный зазор ферромагнитного сердечника трансформатора при механическом контакте сопрягаемых частей стыковочного узла, одна часть которого размещена на судне носителе, а другая - на подводном аппарате.
Бесконтактный способ энергообеспечения и устройство для его реализации имеют следующие недостатки: ухудшение энергетических характеристик и понижение надежности энергообеспечения подводных аппаратов в процессе работы из-за увеличение тока намагничивания трансформатора, увеличение потерь мощности, вызванных появлением на сопрягаемых поверхностях стыковочного узла посторонних объектов - ракушек, водорослей и т.п. Недостатком является также ограничение автономности и дальности плавания подводного аппарата из-за необходимости нахождения судна носителя в районе работы подводного аппарата для периодического пополнения энергии подводного аппарата.
Наиболее близким по технической сущности к предлагаемому способу энергообеспечения подводного аппарата и устройству для его реализации является способ энергообеспечения подводных аппаратов от источника энергии, размещенном на борту подводного аппарата, реализованный в «Электроэнергетической системе подводной лодки с электрохимическим генератором» (Патент РФ №2167783, опубл. 27.05.2001), которая содержит аккумуляторную батарею, гребной электродвигатель, потребители электроэнергии и электрохимический генератор из нескольких энергоблоков, причем электрохимический генератор подключен к аккумуляторной батарее через согласующий преобразователь, разделенный по числу энергоблоков, включенных параллельно, на модули, снабженные датчиками тока энергоблоков и общим блоком управления. При способе, приятом за прототип, энергообеспечение подводного аппарата осуществляется от электрохимического генератора, размещенного на борту подводного аппарата и преобразующего химическую энергию водорода и кислорода в электрическую энергию. Энергоносители энергии (водород и кислород) закачены в баллоны под высоким давлением и размещены также на борту подводного аппарата.
Известный способ энергообеспечения подводного аппарата и устройство для его реализации имеет недостатки:
- ограничены автономность и дальность плавания подводного аппарата из-за ограниченного объема и ресурса энергоносителей и электрохимического генератора в целом.
Задачей изобретения является увеличение автономности и дальности плавания подводного аппарата путем использования в качестве источника энергии морское течение, обладающее огромным запасом механической энергии.
Техническим результатом изобретения является увеличение автономности и дальности плавания подводного аппарата за счет преобразования предлагаемым устройством механической энергии встречного по отношению к неподвижному корпусу подводного аппарата потока воды морского течения в электрическую энергию.
Решение задачи достигается тем, что в способе энергообеспечения подводного аппарата, электроэнергетическая система которого содержит источник энергии, аккумуляторную батарею, полупроводниковый преобразователь, электрическую машину, на валу которой установлен гребной винт, при котором энергия источника преобразуется в электрическую энергию постоянного тока и пополняет запас электрической энергии аккумуляторной батареи, имеются следующие отличия: в качестве источника энергии используется морское течение, механическая энергия которого при прохождении потока воды через лопасти винта при фиксированном положении корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну, преобразуется в электрическую энергию.
А также, подводный аппарат закреплен на корпусе движущегося базового судна.
Кроме того, решение задачи достигается тем, что в устройстве для реализации способа содержащем аккумуляторную батарею, полупроводниковый преобразователь, синхронную машину с магнитоэлектрическим возбуждением, ротор которой механически соединен с винтом, а обмотка статора подключена к цепи переменного тока полупроводникового преобразователя, цепь постоянного тока которого подключена к аккумуляторной батареи, имеются следующие отличия: дополнительно введены устройство контроля положения продольной оси корпуса подводного аппарата и управления им и устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну, а обмотка статора синхронной машины выполнена многофазной из N трехфазных обмоток, полупроводниковый преобразователь выполнен обратимым по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины, причем цепи постоянного тока N полупроводниковых модулей обратимого полупроводникового преобразователя при работе синхронной машины в двигательном режиме соединены параллельно, а при работе синхронной машины в генераторном режиме соединены последовательно,
Таким образом, в способе энергообеспечения подводного аппарата, в качестве источника энергии используется морское течение, механическая энергия которого при прохождении потока воды через лопасти винта при фиксированном положении продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну, преобразуется в электрическую энергию.
В устройство, реализующее этот способ дополнительно введены устройство контроля положения продольной оси корпуса подводного аппарата и управления им и устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну, а обмотка статора синхронной машины выполнена многофазной из N трехфазных обмоток, полупроводниковый преобразователь выполнен обратимым по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины, причем цепи постоянного тока N полупроводниковых модулей обратимого полупроводникового преобразователя при работе синхронной машины в двигательном режиме соединены параллельно, а при работе синхронной машины в генераторном режиме соединены последовательно.
Преобразование механической энергии встречного потока воды в электрическую энергия, передаваемую для заряда аккумуляторной батареи, осуществляется синхронной машиной, ротор которой механически связан с лопастями гребного винта. При этом синхронная машина работает генератором, а обратимый полупроводниковый преобразователь работает в режиме активного выпрямителя.
Существенные отличия, позволяющие реализовать технический результат:
- энергоносителем системы энергообеспечения подводного аппарата является морское течение со скоростью перемещения потока воды достаточной для эффективной работы электроэнергетической системы в режиме заряда аккумуляторной батареи подводного аппарата;
- подводный аппарат оснащен устройством для контроля положения продольной оси корпуса подводного аппарата и управления им и устройством для фиксации положения продольной корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну;
- обмотка статора синхронной машины выполнена многофазной из N трехфазных обмоток;
- полупроводниковый преобразователь выполнен обратимым по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины;
- цепи постоянного тока N полупроводниковых модулей обратимого полупроводникового преобразователя при работе синхронной машины в двигательном режиме соединены параллельно, а при работе синхронной машины в генераторном режиме соединены последовательно.
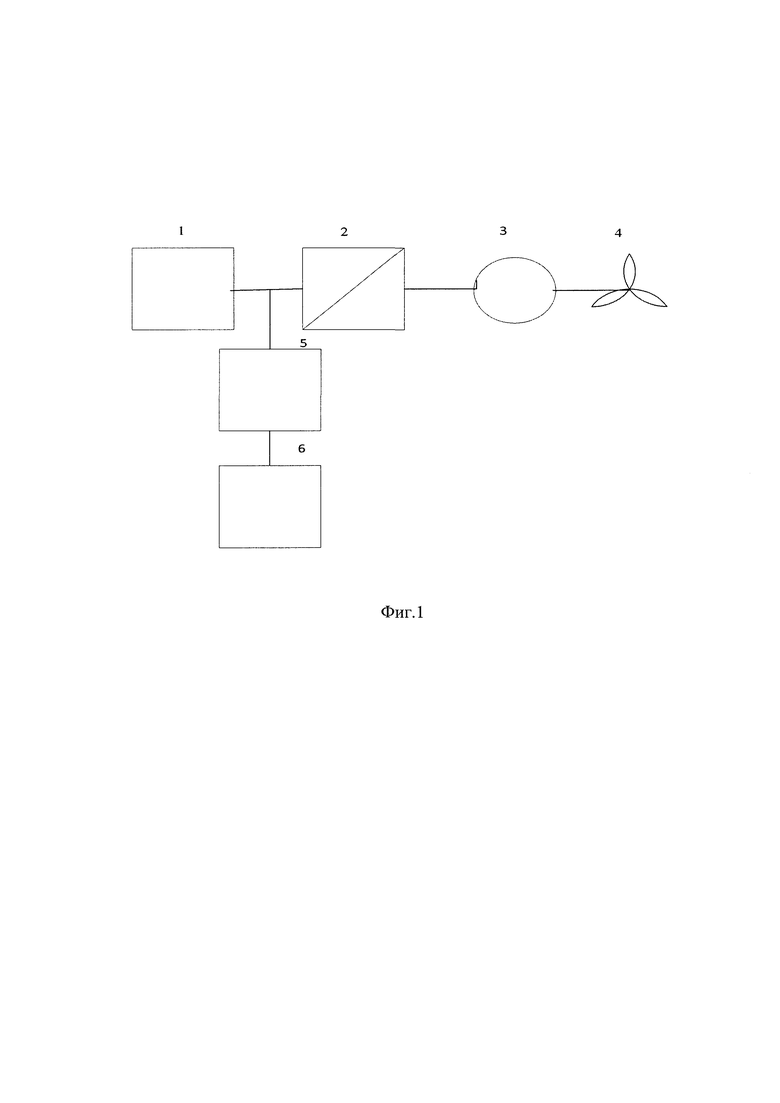
Сущность предлагаемого изобретения поясняется чертежом, где на фиг. 1 приведена функциональная схема электроэнергетической системы и введены следующие обозначения:
1 - аккумуляторные батареи;
2 - обратимый полупроводниковый преобразователь;
3 - синхронная машина с магнитоэлектрическим возбуждением;
4 - гребной винт;
5 - устройство контроля положения продольной оси корпуса подводного аппарата и управления им;
6 - устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну.
Электроэнергетическая система подводного аппарата содержит аккумуляторную батарею 1, обратимый полупроводниковый преобразователь 2, синхронную машину 3, гребной винт 4, устройство контроля положения продольной оси корпуса подводного аппарата и управления им 5, устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну 6. Обмотка статора синхронной машины 3 выполнена многофазной из N трехфазных обмоток, а обратимый полупроводниковый преобразователь 2 выполнен по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины. При режиме заряда аккумуляторной батареи 1 корпус подводного аппарата устанавливается с помощью устройства 5 так, чтобы его продольная ось была направлена встречно направлению потока воды, и с помощью устройства 6 была зафиксирована неподвижно по отношению к морскому дну. Поток воды, проходя через лопасти гребного винта 4, работающего в режиме турбины, приводит его во вращение. Механическая энергия потока воды преобразуется в механическую энергию вращения гребного винта 4. Механическая энергия вращения гребного винта 4 приводит во вращение ротор синхронной машины 3. Вращающийся магнитный поток, созданный магнитоэлектрической системой возбуждения, размещенной на роторе синхронной машины 3, наводит в проводниках обмотки статора ЭДС. Синхронная машина 3 работает в генераторном режиме, вырабатывает электрическую энергию переменного тока и передает ее обратимому полупроводниковому преобразователю 2. Обратимый полупроводниковый преобразователь 2 работает в режиме активного выпрямителя, преобразует электрическую энергию переменного тока в электрическую энергию постоянного тока и заряжает аккумуляторную батарею 1. При заряде аккумуляторной батареи 1 для согласования величины выходного напряжения обратимого полупроводникового преобразователя 2 с напряжением аккумуляторной батареи 1 цепи постоянного тока N модулей обратимого полупроводникового преобразователя 2 соединены последовательно и подключены к аккумуляторной батарее 1. Точное согласование величины выходного напряжения обратимого полупроводникового преобразователя, с напряжением аккумуляторной батареи осуществляется путем изменения величины коэффициента модуляции μ напряжения цепи переменного тока обратимого полупроводникового преобразователя 2. Диапазон регулирования коэффициента μ: 0<μ<1. Напряжение цепи постоянного тока одного модуля обратимого полупроводникового преобразователя Ud1 при работе в режиме активного выпрямителя обратно пропорционально коэффициенту модуляции
Ud1=1,41Uл.с.м,/μ;
где Uл.с.м - действующее значение линейного напряжения синхронной машины при генераторном режиме работы.
Рассмотрим пример реализации изобретения.
По методике расчета параметров гребного винта, приведенной в источнике (1), определяются основные параметры гребного винта и синхронной машины для подводного аппарата с заданными параметрами.
Маршевая скорость движения подводного аппарата υa
υa=20 узлов=10,285 м/с;
Диаметр винта D=1,3 м.
Приняв отношение шага винта h к диаметру лопастей винта D
h/D=1,1;
можно определить величину шага винта
h=(h/D)⋅D=1,1⋅1,3=1,43 м;
Произведение шага винта h на скорость вращения винта n представляет собой теоретическую скорость перемещения винта вдоль продольной оси подводного аппарата.
Из соотношения h⋅nN=υa/(1-s);
определяется значение номинальной скорости nN вращения винта:
nN=υa/[h⋅(1-s)];
Значение скольжения s принимаем равным 0,137
nN=10,285/(1,43⋅0,863)=8,33 об/с=500 об/мин=8,33 об/с;
Окружная скорость вращения винта υr, т.е. скорость перемещения лопасти винта в плоскости, перпендикулярной оси винта
υr=π⋅D⋅nN=3,14⋅1,3⋅8,33=34 м/с;
Мощность электрического двигателя Рд, необходимая для работы винта с заданными параметрами, определяется в первом приближении (без учета потерь) по формуле, приведенной в источнике (1):
Рд=D4⋅102⋅υa⋅n2/44 л.с;
Размерности величин: υa - м/с; а n - об/с;
При значении параметров винта D=1,3 м; nN=8,33 об/с; υa=10,285 м/с; мощность двигателя Рд должна быть не менее
Рд=1,34⋅102⋅10,285⋅8,332/44=812,1 л.с;
или при пересчете на Ватты:
Рд=812,1⋅736=597705 Вт=597,7 кВт;
При зарядке аккумуляторной батареи гребной винт работает в режиме турбины, а синхронной машины - в режиме генератора.
Мощность Рг, генерируемая синхронной машиной, определяется с учетом эффективности работы генератора и турбины (2):
Рг=ηг⋅ηт⋅Рп,
где Рп - мощность потока воды, поступающего на лопасти винта, Вт;
ηг - КПД генератора, значение ηг=0,85-0,95;
ηт - КПД турбины, значение ηт=0,5-0,7;
Рп=ρ⋅g⋅Q⋅H Вт;
где ρ - плотность воды, равна 1000 кг/м3;
g - ускорение свободного падения, равно 9,81 м/с2;
Q - расход воды, м3/с;
Н - скоростной напор потока воды, м
Q=Sт⋅υn
где Sт - площадь сечения, через которое проходит поток воды на лопасти винта, м2;
Скоростной напор потока воды H можно определить по формуле
Н=υп2/2g;
С учетом значений параметров, приведенных выше, мощность потока можно определить по формуле
Рп=0,5⋅ρ⋅Sт⋅υп3; Вт;
При принятых в примере расчета параметрах:
- размер диаметра лопастей винта D=1,3 м (площадь Sт=π⋅D2/4=1,327 м2);
- скорость потока υп=3,084 м/с;
- плотность воды ρ=1000 кг/м3
мощность потока можно определить по формуле:
Рп=663⋅υп3; Вт
Значение мощности Рп является по сути предельным значением мощности, которую можно получить от синхронного генератора без учета потерь в генераторе и турбине при заданном значении скорости потока и размерах винта. Мощность, генерируемая синхронной машиной с учетом минимально возможных значений КПД генератора ηг=0,9 и турбины (винта) ηт=0,5:
Рг=0,9⋅0,5⋅663⋅υп3Вт=298,35⋅υп3Вт=0,29835⋅υп3; кВт
Скорость вращения винта, а значит и скорость вращения ротора синхронной машины, можно определить по формуле, приведенной в (2):
n=υп/h; об/с;
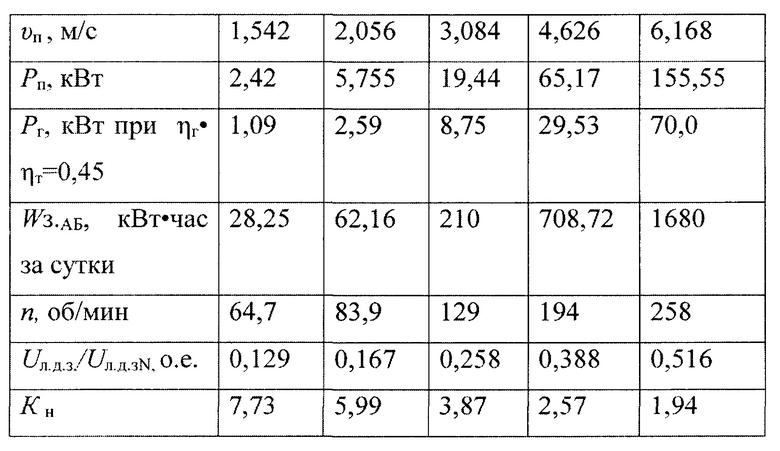
В таблице 1 приведены результаты расчета основных параметров, характеризующих работу винта в режиме турбины и синхронной машины в режиме генератора, включая и величину электрической энергии, передаваемой на заряд аккумуляторной батареи в течение одних суток, Wз.АБ; кВт⋅час.
Результаты расчета показывают, что уже при скорости потока равной 1,542 м/с = 3 узла можно производить дозаряд аккумуляторной батареи. С увеличением скорости потока эффективность заряда аккумуляторной батареи существенно повышается.
В предпоследней строке таблицы 1 приведены отношения действующих значений линейного напряжения одной трехфазной обмотки при текущем значении скорости потока, Uл.д.з, к номинальному значению этого напряжения Uл.д.зN, которое будет при номинальном значении скорости вращения ротора синхронной машины, т.е. при nN=8,33 об/с=500 об/мин,
Uл.д.з,/Uл.д.зN=n/nN.;
Из приведенных расчетов видно, что при низких значениях скорости потока воды напряжение одной трехфазной обмотки синхронной машины недостаточно для заряда аккумуляторной батареи. Поэтому требуемый для заряда аккумуляторной батареи уровень напряжения достигается суммированием выпрямленных напряжений N однотипных полупроводниковых модулей, на входы которых подано трехфазное напряжение от N трехфазных обмоток статора синхронной машины, и регулированием коэффициента модуляции напряжения цепи переменного тока активного выпрямителя. В последней строке таблицы 1 приведены значение требуемого для заряда аккумуляторной батареи коэффициента увеличения напряжения Кн для каждого значения скорости потока воды.
Значения скорости морских течений в различных акваториях мирового океана указаны в Атласах океанов и проливов, например, в (3) и (4), а также приведены в монографиях. Например, в монографии известного ученого гидрографа Евгенова Н.И. (5) на стр. 20 указано, что «… Скорость течений в отдельных наиболее суженных участках проливов нередко достигает 6-7 миль в час и даже больше. Из районов с очень сильными приливными течениями можно, например, отметить вход в Пенжинскую губу, в которой наблюдаются приливы, достигающие наибольшей высоты в Советском Союзе (свыше 13 м). Весьма сильны течения в узких проливах среди островов Алеутской гряды и у побережья Аляски, где они местами достигают исключительной скорости - до 10 и даже больше узлов (миль в час). Такие районы далеко не единичны. В 1934 г., идя на ледоколе «Красин» из Европы через Панамский канал в Берингов пролив, мы наблюдали как наш мощный корабль, проходя одной из узкостей между островом Ванкувер и тихоокеанским берегом Канады, встретил сильное приливное течение. Несмотря на то, что проход этого района по расчету не совпадал с максимальной скоростью приливного течения, ледокол некоторое время с трудом продвигался вперед. Вода местами бурлила и стремительно неслась между берегами навстречу кораблю». Из приведенной информации следует, что в мировом океане достаточно много течений, энергия которых может быть использована для эффективной зарядки аккумуляторных батарей подводного аппарата.
В том случае, когда скорость течения в заданной акватории мирового океана недостаточна для эффективного заряда аккумуляторной батареи и требуется передислокация подводного аппарата на значительное расстояние, подводный аппарат может быть закреплен на корпусе базового судна. При этом подводный аппарат находится под водой и не имеет электрической связи с электроэнергетической системой базового судна. При движении базового судна с закрепленным на корпусе подводным аппаратом встречный поток воды проходит через лопасти винта и приводит его во вращение. Скорость потока воды в этом случае определяется скоростью движения базового судна и может быть достаточно высокой, что обеспечит быстрый заряд аккумуляторной батареи без подъема подводного аппарата на борт базового судна.
Таким образом, в предложенном способе энергообеспечения подводного аппарата и устройстве для его реализации за счет того что в качестве источника энергии используется морское течение, механическая энергия которого преобразуется в электрическую энергию, а также, в устройство дополнительно введены устройство контроля положения продольной оси корпуса подводного аппарата и управления им и устройство для фиксации положения продольной оси корпуса подводного аппарата, достигается значительное увеличение автономности и дальности плавания подводного аппарата, что выгодно отличает предложенное изобретение от прототипа.
Использованная литература:
1. Новак Г.М. Справочник по катерам, лодкам и моторам. - 2-е изд. перераб. и доп. - Л. Судостроение, 1982. - 352 с.: илл.
2. Кусков А.И. Разработка и исследование мобильной гидротурбинной установки для энергообеспечения и водоснабжения сельскохозяйственных объектов. Диссертация на соискание ученой степени кандидата технических наук. Специальность 05.20.02. Москва. 2015 г.
3. Атлас океанов. Тихий океан. М.: Главное управление навигации и океанографии. Министерство обороны СССР., 1974 - 288 с.
4. Атлас океанов. Проливы мирового океана. М. ВМФ. 1993. - 392 с.
5. Евгенов Н.И. Морские течения. Изд. 2-е. Л. Гидрометеоиздат. 1957 - 108 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙТВО ДЛЯ ЭНЕРГООБЕСПЕЧЕНИЯ ПОДВОДНОГО ЭНЕРГОАККУМУЛИРУЮЩЕГО ОБЪЕКТА | 2021 |
|
RU2775329C1 |
| СПОСОБ РАЗГОНА ГЛИССИРУЮЩЕГО СУДНА | 2019 |
|
RU2716514C1 |
| Система энергообеспечения подводного аппарата | 2020 |
|
RU2750396C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА БОЛЬШОЙ МОЩНОСТИ | 2012 |
|
RU2498926C1 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ СУДОВОЙ ГИДРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2009 |
|
RU2396182C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2014 |
|
RU2560198C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 2017 |
|
RU2658762C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРИВОДА ТУРБОНАГНЕТАТЕЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2084653C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2521115C2 |
| РАЗГОННОЕ УСТРОЙСТВО ДЛЯ ВЗЛЕТА КОРАБЕЛЬНЫХ САМОЛЕТОВ | 2019 |
|
RU2712407C1 |
Изобретение относится к области электротехники и может быть использовано в электроэнергетических системах подводных аппаратов с большой автономностью и дальностью плавания. Устройство для энергообеспечения подводного аппарата содержит аккумуляторную батарею, полупроводниковый преобразователь, синхронную машину с магнитоэлектрическим возбуждением, ротор которой механически соединен с винтом, а обмотка статора подключена к цепи переменного тока полупроводникового преобразователя, цепь постоянного тока которого подключена к аккумуляторной батарее. Дополнительно введены устройство контроля положения продольной оси корпуса подводного аппарата и управления им и устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну. Обмотка статора синхронной машины выполнена многофазной из N трехфазных обмоток. Полупроводниковый преобразователь выполнен обратимым по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины. Цепи постоянного тока N полупроводниковых модулей обратимого полупроводникового преобразователя при работе синхронной машины в двигательном режиме соединены параллельно, а при работе синхронной машины в генераторном режиме соединены последовательно. Для энергообеспечения подводного аппарата в качестве источника энергии при заряде аккумуляторной батареи используется морское течение, механическая энергия которого при прохождении потока воды через лопасти винта при фиксированном положении продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну преобразуется в электрическую энергию. Достигается увеличение автономности и дальности плавания подводного аппарата. 2 н. и 1 з.п. ф-лы, 1 ил.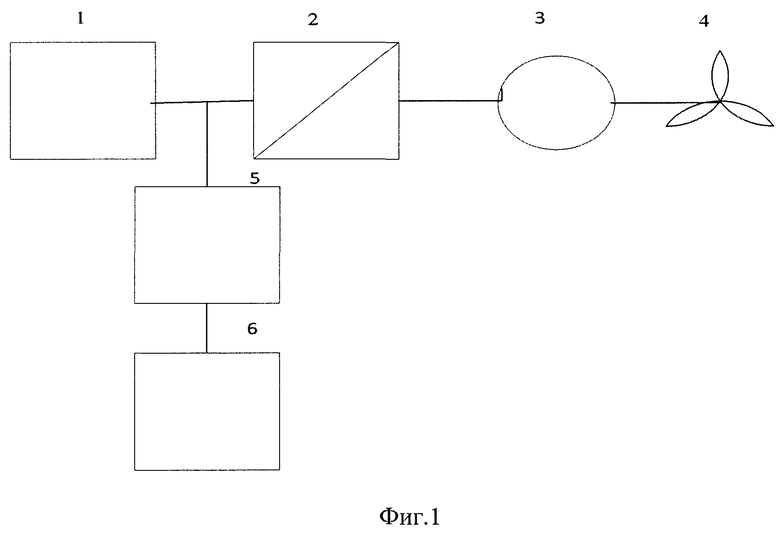
1. Способ энергообеспечения подводного аппарата, электроэнергетическая система которого содержит источник энергии, аккумуляторную батарею, полупроводниковый преобразователь, электрическую машину, на валу которой установлен гребной винт, при котором энергия источника преобразуется в электрическую энергию постоянного тока и пополняет запас электрической энергии аккумуляторной батареи, отличающийся тем, что в качестве источника энергии используется морское течение, механическая энергия которого при прохождении потока воды через лопасти винта при фиксированном положении корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну преобразуется в электрическую энергию.
2. Способ энергообеспечения подводного аппарата по п.1, отличающийся тем, что подводный аппарат закреплен на корпусе движущегося базового судна.
3. Устройство для реализации способа энергообеспечения подводного аппарата, содержащее аккумуляторную батарею, полупроводниковый преобразователь, синхронную машину с магнитоэлектрическим возбуждением, ротор которой механически соединен с винтом, а обмотка статора подключена к цепи переменного тока полупроводникового преобразователя, цепь постоянного тока которого подключена к аккумуляторной батарее, отличающееся тем, что дополнительно введены устройство контроля положения продольной оси корпуса подводного аппарата и управления им и устройство для фиксации положения продольной оси корпуса подводного аппарата встречно направлению потока воды и неподвижно по отношению к морскому дну, а обмотка статора синхронной машины выполнена многофазной из N трехфазных обмоток, полупроводниковый преобразователь выполнен обратимым по модульной схеме из N однотипных полупроводниковых модулей, мощность каждого из которых равна 1/N мощности синхронной машины, причем цепи постоянного тока N полупроводниковых модулей обратимого полупроводникового преобразователя при работе синхронной машины в двигательном режиме соединены параллельно, а при работе синхронной машины в генераторном режиме соединены последовательно.
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ СИСТЕМА ПОДВОДНОЙ ЛОДКИ С ЭЛЕКТРОХИМИЧЕСКИМ ГЕНЕРАТОРОМ | 1999 |
|
RU2167783C1 |
| Способ изготовления биомициново-витаминного препарата | 1960 |
|
SU132773A1 |
| US 4571192 A1, 18.02.1986 | |||
| US 1223616 A1, 24.04.1917. | |||

