Изобретение относится к судостроению, а именно к движительно-рулевым комплексам судов, и предназначено для обеспечения динамической рекуперации энергии набегающего потока воды на морских и речных судах.
Известен способ использования судовой гребной электрической установки (РФ, патент Ru 2276040 С1 от 2004), заключающийся в том, что приводят в движение судно с заданной скоростью посредством азимутального движительно-рулевого комплекса, закрепленного в трубе на радиальных и аксиальных подшипниках, который приводят во вращение электродвигателем.
Недостатком данного способа является отсутствие обратимости, то есть возможности использования системы в качестве гидроэнергетической.
Известен способ использования судовой гидроэнергетической установки (СГЭУ) (РФ, патент RU 2150408 С1 от 1998 г.), принятый за прототип, позволяющий обеспечить динамическую рекуперацию энергии гидравлического потока на морских судах посредством магнитогидродинамического генератора (МГД), размещенного в диаметрально-осевом трубопроводе.
Известный способ заключается в том, что судно приводят в движение с заданной постоянной скоростью. Это обеспечивает постоянное воздействие набегающего потока воды на подводную часть корпуса, направленное противоположно направлению движения судна. Поток частично поступает в диаметрально-осевой трубопровод судна через водозаборные отверстия. Давление скоростного напора перемещает поток через трубопровод в направлении выходного патрубка. Поскольку давление в кормовой части судна понижено, то у выходного патрубка создается разрежение, приводящее к увеличению скорости потока внутри трубопровода, которая становится выше, чем скорость потока за бортом. Поток, проходя по трубопроводу, воздействует на МГД, который в результате вырабатывает электрический ток. Таким образом, достигается обеспечение динамической рекуперации энергии, которую преобразуют затем в электрическую и направляют в распределительную сеть судна для питания потребителей, таких как навигационное оборудование, освещение, зарядные устройства аккумуляторных батарей, системы сигнализации и жизнеобеспечения и т.д.
При этом водозаборные отверстия разделяют рулевым устройством, которое позволяет незначительно улучшить маневренность судна за счет перераспределения отбора воды между его бортами.
Однако прототип обладает рядом недостатков. Во-первых, данную систему практически невозможно установить на готовое судно, так как это сопряжено со значительными изменениями в традиционной конструкции корпуса судна, следовательно, такая модернизация неперспективна. Во-вторых, эта система предполагает размещение вдоль всего судна продольного канала, который занимает значительное пространство, следовательно, либо ограничивает полезное пространство, предназначенное для размещения груза и оборудования энергетической установки, либо увеличивает осадку судна, что снижает его скорость и эффективность использования. В-третьих, она сравнительно мало увеличивает маневренные качества судна ввиду того, что использование дополнительного руля в носовой части не дает той маневренности, которую обеспечивает известный из аналогов азимутальный движительно-рулевой комплекс. В-четвертых, в системе используется достаточно сложный МГД-генератор, а в настоящее время подобное устройство практически не выпускается серийно ни отечественными, ни зарубежными производителями, соответственно применение последнего значительно увеличивает строительную стоимость судна.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в устранении указанных недостатков, а именно: достигнуть достаточного снижения затрат на модернизацию или строительной стоимости, исключить ограничение полезного пространства, занимаемого под размещение груза и судовой энергетической установки, а также ставится задача достаточного увеличения маневренных характеристик судна.
Указанная техническая задача достигается тем, что в известном способе использования судовой гидроэнергетической установки приводят судно в движение с заданной скоростью, воздействуют набегающим потоком воды, направленным противоположно направлению движения судна, на один из элементов судовой гидроэнергетической установки посредством встроенного в нее направляющего канала и вырабатывают в ней электрическую энергию посредством генератора электрической энергии для использования ее в электрораспределительной сети судна, в отличие от него, в заявляемом способе в качестве судовой гидроэнергетической установки используется судовой выдвижной азимутальный движительно-рулевой комплекс с короткозамкнутой асинхронной машиной. Его после приведения судна в движение с заданной скоростью выдвигают в рабочее положение для использования в генераторном или двигательном режимах, в первом из которых воздействуют набегающим потоком воды на гребной винт судового выдвижного азимутального движительно-рулевого комплекса, увеличивая тяговое усилие его гребного винта посредством направляющей насадки гребного винта. Передают механическую энергию гребного винта судового выдвижного азимутального движительно-рулевого комплекса посредством углового редуктора и вала на короткозамкнутую асинхронную машину (т.е. обратимую). Поворот самого судового выдвижного азимутального движительно-рулевого комплекса на заданный угол в его двигательном режиме осуществляется посредством гидравлического устройства. В работе судового выдвижного азимутального движительно-рулевого комплекса в генераторном режиме вначале разгоняют короткозамкнутую асинхронную машину, а затем возбуждают ее посредством подключения батареи конденсаторов с регулированием ее емкости. Получаемое в машине трехфазное переменное напряжение с первичной частотой преобразуют в постоянное напряжение посредством полупроводникового мостового конвертора (выпрямителя). Затем это постоянное напряжение преобразуют в трехфазное переменное напряжение с частотой, требуемой в судовой электрораспределительной сети, посредством второго полупроводникового мостового конвертора (инвертора), осуществляя на каждом из двух последних этапов управление коммутацией полупроводниковых элементов данных конверторов управляющего микроконтроллера с запоминающим устройством и соответствующими его драйверами.
При этом сами параметры работы данной схемы судового выдвижного азимутального движительно-рулевого комплекса, такие как частота вращения машины, ток нагрузки и напряжение системы, в виде электрических сигналов преобразуют по выходу с соответствующих их измерительных преобразователей в цифровые посредством аналого-цифрового преобразователя и направляют затем его цифровые сигналы на данный управляющий микроконтроллер, на который также подают электрические сигналы на запуск, остановку и вывод на внешний монитор рабочих параметров системы посредством блок-терминала операторского управления. Причем регулирование емкости конденсаторной батареи осуществляют путем обработки электрических сигналов по параметрам потребляемой нагрузки, реактивной нагрузки и напряжения системы посредством регулирующего емкость модуля.
Предложенный способ в совокупности его отличительных и ограничительных признаков устраняет все вышеперечисленные недостатки. Заявляемая система, реализующая этот способ, без затруднения может быть установлена на большинстве морских и речных судов, так как она использует традиционный выдвижной азимутальный движительно-рулевой комплекс, установка которого не сопряжена со значительными изменениями в конструкциях и элементах набора корпуса судна, следовательно, затраты на модернизацию будут снижены. Кроме того, существует некоторое количество судов, уже оборудованных подобными выдвижными азимутальными движительно-рулевыми комплексами; для них потребуется только модернизация, согласно заявляемому изобретению, традиционной существующей электрической схемы привода (не касается прототипа, т.к. ее у него нет) в виде изменения ее полупроводниковых мостовых конверторов, соответствующих режимам работы комплекса, микроконтроллерных систем управления их коммутацией, а также добавления модуля, регулирующего емкость конденсаторной батареи системы возбуждения машины, и ряда первичных измерительных преобразователей. Предложенная в способе система, таким образом, не требует значительного пространства и не увеличивает осадку судна благодаря тому, что предполагает выдвижное исполнение. Этим достигается повышение его скорости и эффективности использования. Использование данной системы позволяет также улучшить маневренные характеристики судна, так как в маневренных режимах судна используется традиционный выдвижной азимутальный движительно-рулевой комплекс, что, в свою очередь, позволяет снизить затраты на использование дополнительных буксиров в швартовных режимах, повысить безопасность мореплавания. К тому же, способ предполагает упрощение системы, а именно исключение сложного МГД, так как вместо него используется серийная короткозамкнутая асинхронная (т.е. обратимая) машина, что в определенной степени снижает затраты на модернизацию или строительную стоимость судна.
Данный способ предполагает динамическую рекуперацию энергии набегающего потока воды, которую преобразуют в электрическую и направляют в электрораспределительную сеть судна путем использования короткозамкнутой асинхронной машины в качестве генератора электрической энергии в соответствии с принципом обратимости электрических машин. Это придает заявляемой совокупности признаков главное свойство - рекуперацию энергии наряду с обеспечением двигательного режима комплекса. Несомненным достоинством такого рода генераторов перед другими видами являются отсутствие коллекторно-щеточного аппарата и, как следствие этого, большая долговечность и надежность. Возбуждение такого генератора после его разгона до необходимой частоты вращения обеспечивается подключением батареи конденсаторов с регулируемой емкостью. Это, в свою очередь, также облегчает модернизацию, а также снижает затраты на модернизацию, либо строительную стоимость судна.
Таким образом, достигается поставленная техническая задача.
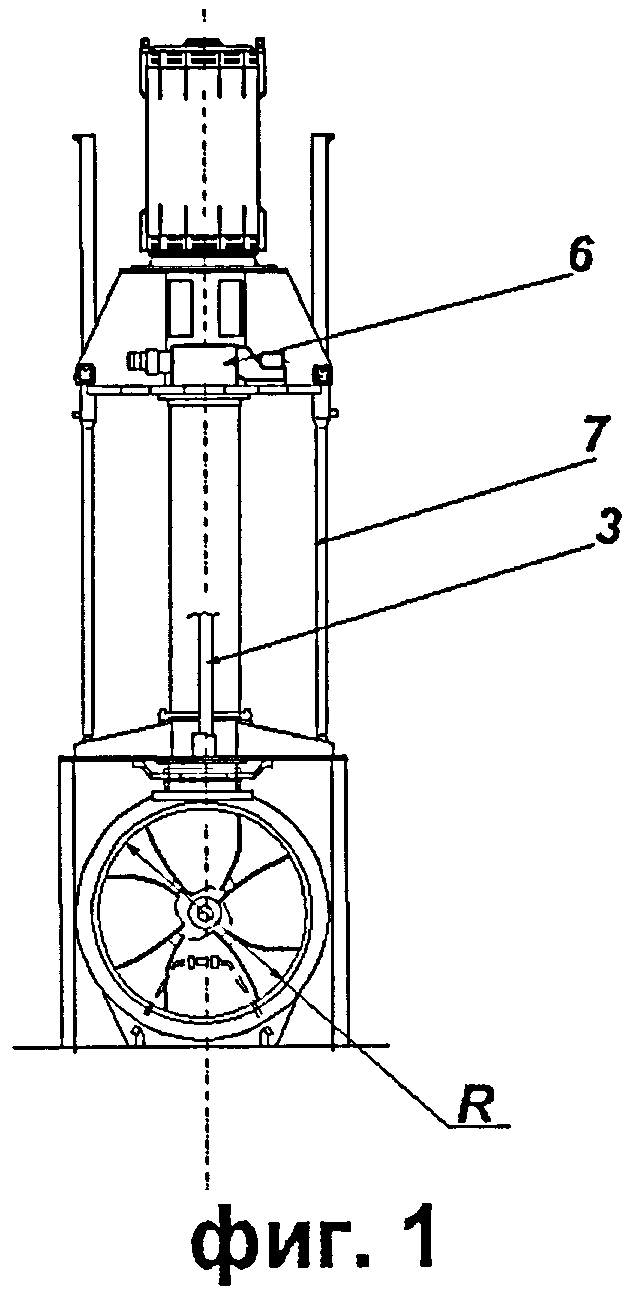
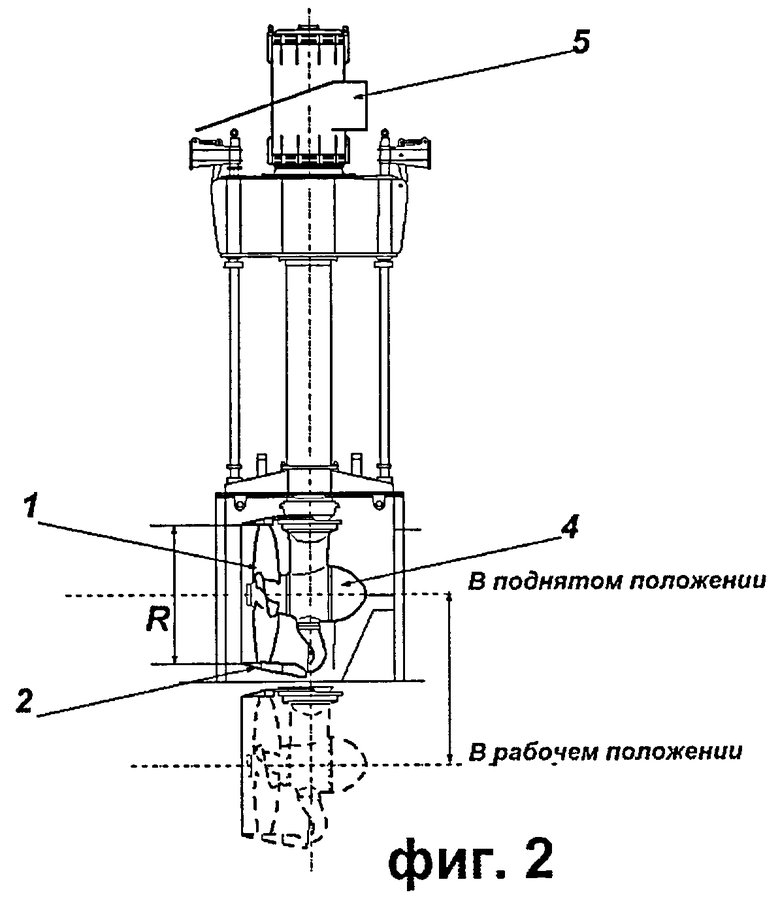
Заявляемый способ использования гидроэнергетической установки поясняется иллюстрациями на фиг.1, фиг.2 и фиг.3, на которых представлены соответственно схема механической части судового выдвижного азимутального движительно-рулевого комплекса вид сзади, вид сбоку и блок-схема электропривода данного комплекса.
Механическая часть устройства, реализующего способ, приведена на фиг.1 и фиг.2. Рабочим органом системы является гребной винт 1, размещенный в направляющей насадке 2 для достижения наибольшего тягового усилия. Передачу вращающего момента к винту в двигательном режиме и, наоборот, в генераторном режиме осуществляют через вал 3 и угловую редукторную передачу 4. В качестве приводного двигателя (в двигательном режиме) и генератора (в генераторном режиме) используют серийную короткозамкнутую асинхронную машину морского исполнения 5, являющуюся обратимой. Поворот системы на заданный угол осуществляют при помощи поворотного гидравлического устройства 6. Механическую жесткость конструкции обеспечивают вертикальные упоры 7.
Блок-схема электропривода данного судового выдвижного азимутального движительно-рулевого комплекса поясняется на фиг.3, которая состоит из батареи конденсаторов 8, подключенной к статорной обмотке (не показано) асинхронной короткозамкнутой машины 5, полупроводникового мостового конвертора 9, используемого в режиме выпрямителя при эксплуатации системы в качестве гидроэнергетической установки либо в качестве инвертора при эксплуатации системы в режиме гребной электрической установки и соединенного с ним второго полупроводникового мостового конвертора 10, используемого в режиме инвертора при эксплуатации системы в качестве гидроэнергетической установки либо в качестве выпрямителя при эксплуатации системы в режиме гребной электрической установки, микроконтроллера 11, выходные порты которого подключены к драйверу 12 (полупроводникового мостового конвертора под номером 9) и драйверу 13 (полупроводникового мостового конвертора под номером 10), а входные порты подключены к постоянному запоминающему устройству 14 (ПЗУ) этого микроконтроллера, блок-терминалу 15, а также аналогово-цифровому преобразователю (АЦП) 16, входы которого, в свою очередь, соединены с первичным измерительным преобразователем частоты вращения асинхронной машины 17, первичным измерительным преобразователем 18, измеряющим ток в системе, измерительным шунтом 19, регистрирующим напряжение в цепи постоянного тока. В схему также входит подсистема управления емкостью конденсаторной батареи 20 (модуль), входные порты которой подключены к измерительному контуру нагрузки судовой сети 21, измерительному каналу напряжения системы 22, измерительному каналу тока 23, вырабатываемого системой, а сама конденсаторная батарея 8 подключена через контактор 24 (КМ1) к статорной обмотке (не показана) машины 5. Силовая часть системы по отдельному фидеру 25 подключена к шинам главного распределительного щита 26 судна через автоматический выключатель 27 (OF1).
Способ использования судовой гидроэнергетической установки осуществляют следующим образом. В генераторном режиме судно приводят в движение с заданной постоянной скоростью, и среда, в которой оно перемещается, оказывает воздействие на подводную часть корпуса (не показано). Вначале выдвигают судовой азимутальный движительно-рулевой комплекс в рабочее положение (фиг.2). В подводной части размещен его рабочий орган - гребной винт 1 в направляющей насадке 2. Набегающий поток приводит во вращение гребной винт 1, который передает крутящий момент на вал 3 через угловую редукторную передачу 4. Вал 3 приводит во вращение (разгоняет) асинхронную машину 5, которая может служить также приводным двигателем в двигательном режиме.
К статорной обмотке (не показана) приведенной во вращение асинхронной машины 5 (М), по достижении определенной скорости, подключают батарею конденсаторов с регулируемой емкостью 8 при помощи контактора 24 (КМ1). При этом асинхронная машина 5 (М) возбуждается и начинает вырабатывать трехфазное переменное напряжение с первичной частотой f0. Полупроводниковый мостовой конвертор 9 (в этом режиме работает в качестве выпрямителя) преобразует трехфазное переменное напряжение в постоянное. Далее полупроводниковый мостовой конвертор 10 (в этом режиме работающий в качестве инвертора) преобразует постоянное напряжение в трехфазное с требуемой частотой fсети. Микроконтроллер 11 управляет драйверами 12 и 13, которые в свою очередь осуществляют коммутацию полупроводниковых конверторов 9 и 10 соответственно. Управление осуществляется автоматически в соответствии с алгоритмами, размещенными в ПЗУ 14, а также в соответствии с параметрами системы, к которым относятся частота вращения машины, нагрузка на систему, напряжение в системе. Частоту вращения машины измеряет первичный измерительный преобразователь 17. Напряжение системы автоматически измеряют при помощи первичного измерительного преобразователя 18. Нагрузке на систему соответствует потребляемый ток, который автоматически регистрируют при помощи измерительного шунта 19 в звене постоянного тока. Аналогово-цифровой преобразователь 16 принимает аналоговые электрически сигналы с выходов этих трех датчиков и преобразует их в цифровые, а затем передает их на входной порт микроконтроллера 11, который использует полученные данные для выполнения корректной коммутации полупроводниковых конверторов. Блок 15 представляет собой обычный терминал управления и служит для ввода в микроконтроллер оператором таких команд как запуск, остановка и вывода на внешний монитор (не показан) рабочих параметров системы посредством электрических сигналов.
В зависимости от изменения реактивной нагрузки в системе емкость, необходимая для возбуждения асинхронной машины, будет изменяться; подсистема управления (модуль) 20 автоматически регулирует емкость конденсаторной батареи 8. Входными сигналами для подсистемы управления емкостью служат реактивная нагрузка системы, измеряемая первичным измерительным преобразователем 21, измерительный канал напряжения системы 22, а также измерительный канал тока 23, вырабатываемого системой.
По достижении требуемого напряжения и частоты судовой сети (не показано) система автоматически подключается к шинам главного распределительного щита 26 судна при помощи автоматического выключателя 27 (QF1), помимо коммутационных задач назначение которого заключается в защите системы от короткого замыкания и перегрузки.
Использование судового выдвижного азимутального движительно-рулевого комплекса в двигательном режиме выполняют при маневрировании судна на малых скоростях. Режим осуществляют обычным путем посредством подачи электрической энергии из судовой электрораспределительной сети от шин 26 на статорную обмотку асинхронной электрической машины 5. При этом подсистема управления емкостью 20 батареи 8 не задействована, а сама конденсаторная батарея с регулируемой емкостью отключена от статорной обмотки асинхронной электрической машины, то есть в этом режиме контактор 24 (КМ1) находится в разомкнутом положении. Микроконтроллер 11 выполняет алгоритмы управления, соответствующие двигательному режиму. В результате угол коммутации полупроводниковых конверторов 9 и 10 меняется таким образом, что они работают как инвертор и выпрямитель соответственно, что необходимо для управления частотой вращения движителя. Направление упора, создаваемого движителем, задают при помощи гидравлического поворотного устройства 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗГОНА ГЛИССИРУЮЩЕГО СУДНА | 2019 |
|
RU2716514C1 |
| Устройство для испытания гребной энергетической установки судна | 1990 |
|
SU1699858A1 |
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ ЕДИНОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ | 2012 |
|
RU2520822C2 |
| СПОСОБ УПРАВЛЕНИЯ СУДОВОЙ КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2011 |
|
RU2483972C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНО-ДВИГАТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 1996 |
|
RU2115589C1 |
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ПОДВОДНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2724197C1 |
| Способ испытаний судовых движительных комплексов и стенд для его осуществления | 2023 |
|
RU2817909C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВАЯ КОЛОНКА | 2017 |
|
RU2670364C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИЖИТЕЛЬНЫМ КОМПЛЕКСОМ СУДОВ ЛЕДОВОГО КЛАССА И ЛЕДОКОЛОВ | 2016 |
|
RU2648544C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2533869C1 |
Изобретение относится к области судостроения. Азимутальный двигательно-движительный комплекс выполнен выдвижным и оснащен короткозамкнутой асинхронной машиной, способной работать в генераторном и двигательном режимах. При работе в генераторном режиме винт комплекса приводится во вращение набегающим потоком воды. Винт посредством редуктора связан с короткозамкнутой асинхронной машиной. Машину возбуждают при помощи батареи конденсаторов с регулируемой емкостью. Получаемую электрическую энергию преобразуют посредством выпрямителя и инвертора для получения ее характеристик, требуемых в бортовой сети судна. Поворот движительно-рулевого комплекса осуществляют при помощи гидравлического устройства. Достигается выработка электроэнергии, а также улучшение маневренных характеристик судна. 3 ил.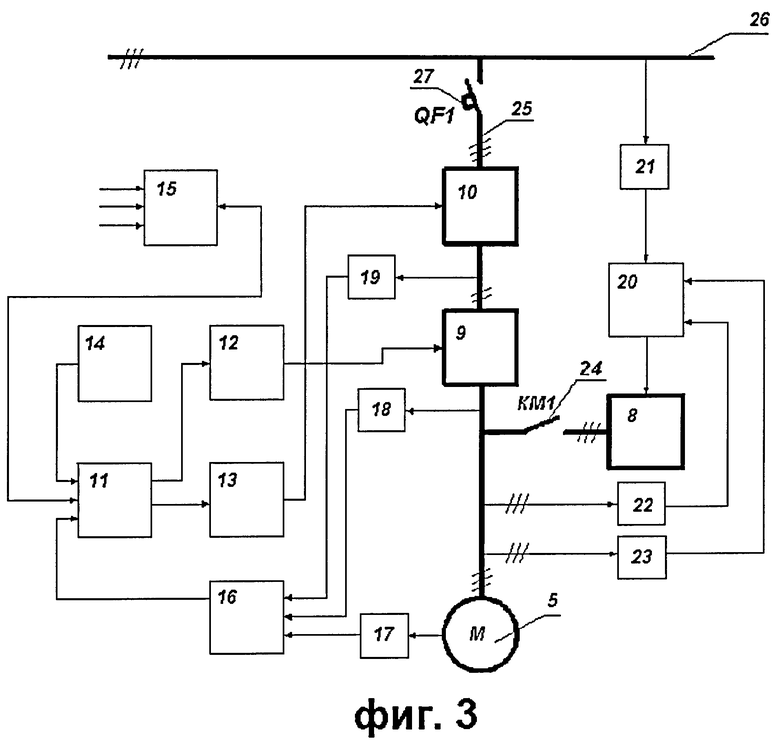
Способ использования судовой гидроэнергетической установки, заключающийся в том, что приводят судно в движение с заданной скоростью, воздействуют набегающим потоком воды, направленным противоположно направлению движения судна, на один из элементов судовой гидроэнергетической установки посредством встроенного в нее направляющего канала и вырабатывают в ней электрическую энергию посредством генератора электрической энергии для использования ее в электрораспределительной сети судна, отличающийся тем, что в качестве судовой гидроэнергетической установки используют выдвижной азимутальный движительно-рулевой комплекс с короткозамкнутой асинхронной машиной, который после приведения судна в движение с заданной скоростью выдвигают в рабочее положение для использования в генераторном или двигательном режимах, в первом из которых воздействуют набегающим потоком воды на винт судового выдвижного азимутального движительно-рулевого комплекса, увеличивая тяговое усилие винта посредством углового редуктора и вала на короткозамкнутую асинхронную машину; поворот самого судового выдвижного азимутального движительно-рулевого комплекса на заданный угол в его двигательном режиме осуществляется посредством гидравлического устройства; а в работе судового выдвижного азимутального движительно-рулевого комплекса в генераторном режиме вначале разгоняют короткозамкнутую асинхронную машину, а затем возбуждают ее посредством подключения к статорной обмотке батареи конденсаторов с регулированием ее емкости; затем получаемое в машине трехфазное переменное напряжение с первичной частотой преобразуют в постоянное напряжение посредством полупроводникового мостового конвертора; затем это постоянное напряжение преобразуют в трехфазное переменное напряжение с частотой, требуемой в судовой электрораспределительной сети, посредством второго полупроводникового мостового конвертора, осуществляя на каждом из двух последних этапов управление коммутацией полупроводниковых элементов данных конверторов посредством управляющего микроконтроллера с запоминающим устройством и соответствующими ему драйверами, при этом сами параметры работы данной системы судового выдвижного азимутального движительно-рулевого комплекса по частоте вращения машины, току нагрузки и напряжению системы в виде электрических сигналов преобразуют по выходу с соответствующих им измерительных преобразователей в цифровые посредством аналого-цифрового преобразователя и направляют затем его цифровые сигналы на данный управляющий микроконтроллер, на который также подают электрические сигналы на запуск, остановку и вывод на внешний монитор рабочих параметров системы посредством блок-терминала операторского управления, причем регулирование емкости конденсаторной батареи осуществляют путем обработки электрических сигналов по параметрам потребляемой полной нагрузки, реактивной нагрузки и напряжения системы посредством регулирующего емкость модуля.
| WO 02058990 A1, 01.08.2002 | |||
| US 3619632 A, 09.11.1971 | |||
| US 1898973 A, 21.02.1933 | |||
| СУДОВОЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2004 |
|
RU2276040C1 |
| СУДОВАЯ ГИДРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2150408C1 |

