Изобретение относится к машиностроению, а именно к механизму управления положением зеркала заднего вида.
Известно устройство исполнительного механизма, содержащее пару электрических микродвигателей, кинематически связанных с зеркалом заднего вида и установленных с возможностью перемещать зеркало вокруг его горизонтальной и вертикальной геометрических осей [Пат. 2309062, МПК B60R 1/072, 2007].
Недостатками прототипа являются:
- относительно сложная конструкция деталей и самого устройства в целом;
- относительно большие массогабаритные характеристики привода, обусловленные наличием корпуса со спиральным ребром, шарнирного соединения, балансира.
Кроме того, при движении задним ходом для контроля посредством зеркала заднего вида положения колес относительно дорожного бордюра требуется достаточно много времени для поворота указанного зеркала вокруг горизонтальной оси в нужное положение.
Известна система контроля «мертвой зоны» боковых зеркал автомобиля, состоящая из ультразвуковых датчиков, располагаемых на заднем бампере автомобиля, состояние которых опрашивается вычислительным ядром системы [Пат. 96822, B60R 1/02, 2010].
Недостатками такой системы является сложность конструкции и неудобство в эксплуатации, обусловленное непривычным для водителя контролем «слепой зоны» (мертвой зоны) и невозможностью оценки скорости движения автомобиля в этой зоне.
Прототипом является привод зеркала заднего вида, содержащий червячные передачи, посредством которых осуществляется поворот зеркала вокруг горизонтальной и вертикальной осей [Пат. 2551598, МПК B60R, 1/072, 2015].
Недостатком данного решения является невозможность быстрого перевода зеркала в другое положение, позволяющее контролировать «слепую зону» или положение колеса автомобиля относительно дорожного бордюра при движении задним ходом.
Задачей изобретения является расширение функциональных возможностей и улучшение эксплуатационных характеристик.
Задача решается тем, что в механизме зеркала заднего вида, содержащем основание корпуса, платформу, приводы, выполненные в виде червячных передач, кинематически связанные с зеркалом заднего вида и установленные с возможностью перемещения зеркала вокруг его горизонтальной и вертикальной геометрических осей, по крайней мере, первая червячная передача дополнительно снабжена первым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси.
Вторая червячная передача дополнительно снабжена вторым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси. Третья червячная передача дополнительно снабжена третьим продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси. Часть оси червяка выполнена из магнитного материала. Опора выполнена в виде магнитопровода. Продольный привод выполнен в виде соленоида. Червяк выполнен намагниченным. Часть магнитопровода выполнена в виде магнитоуправляемого датчика. Катушка соленоида выполнена в виде опоры.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Дополнительно снабжение, по крайней мере, первой червячной передачи первым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси, позволяет при необходимости быстро переводить зеркало в положение, которое обеспечивает визуальный контроль качения заднего колеса автомобиля относительно дорожного бордюра. Это повышает эксплуатационные характеристики и расширяет функциональные возможности.
Дополнительно снабжение второй червячной передачи вторым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси, дает возможность при необходимости быстро переводить зеркало в положение, которое обеспечивает визуальный контроль «слепой (мертвой) зоны»; Это повышает эксплуатационные характеристики и расширяет функциональные возможности.
Дополнительно снабжение третьей червячной передачи третьим продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси, позволяет также просматривать «слепую зону» путем поворота корпуса зеркала, что позволяет отказаться или от второго продольного привода, уменьшая при этом габариты корпуса зеркала, или переводить зеркало на еще больший угол, по сравнению его перевода вторым продольным приводом. Это или увеличивает размер просматриваемой «слепой зоны», или (при сохранении прежних размеров этой зоны) дает возможность уменьшить ход второго продольного привода, что уменьшает его массогабаритные характеристики и габариты корпуса зеркала. Все это расширяет функциональные возможности и повышает эксплуатационные характеристики.
Выполнение части оси червяка из магнитного материала улучшает магнитное взаимодействие с продольным приводом и уменьшает его массогабаритные характеристики и корпуса зеркала, что повышает эксплуатационные характеристики.
Выполнение опоры в виде магнитопровода позволяет одновременно производить фиксирование оси червяка в нужном положении, что упрощает конструкцию, повышает ее надежность и эксплуатационные характеристики.
Выполнение продольного привода в виде соленоида упрощает конструкцию, повышает надежность и эксплуатационные характеристики.
Выполнение червяка намагниченным позволяет отказаться от специального магнита для взаимодействия с соленоидом, что упрощает конструкцию.
Выполнение части магнитопровода в виде магнитоуправляемого датчика позволяет формировать сигнал, оповещающий водителя о переводе зеркала в другое положение, что расширяет функциональные возможности и повышает эксплуатационные характеристики.
Выполнение катушки соленоида в виде опоры упрощает конструкцию, уменьшает ее массогабаритные характеристики и габариты корпуса зеркала, что повышает эксплуатационные характеристики.
Изобретение поясняется чертежами.
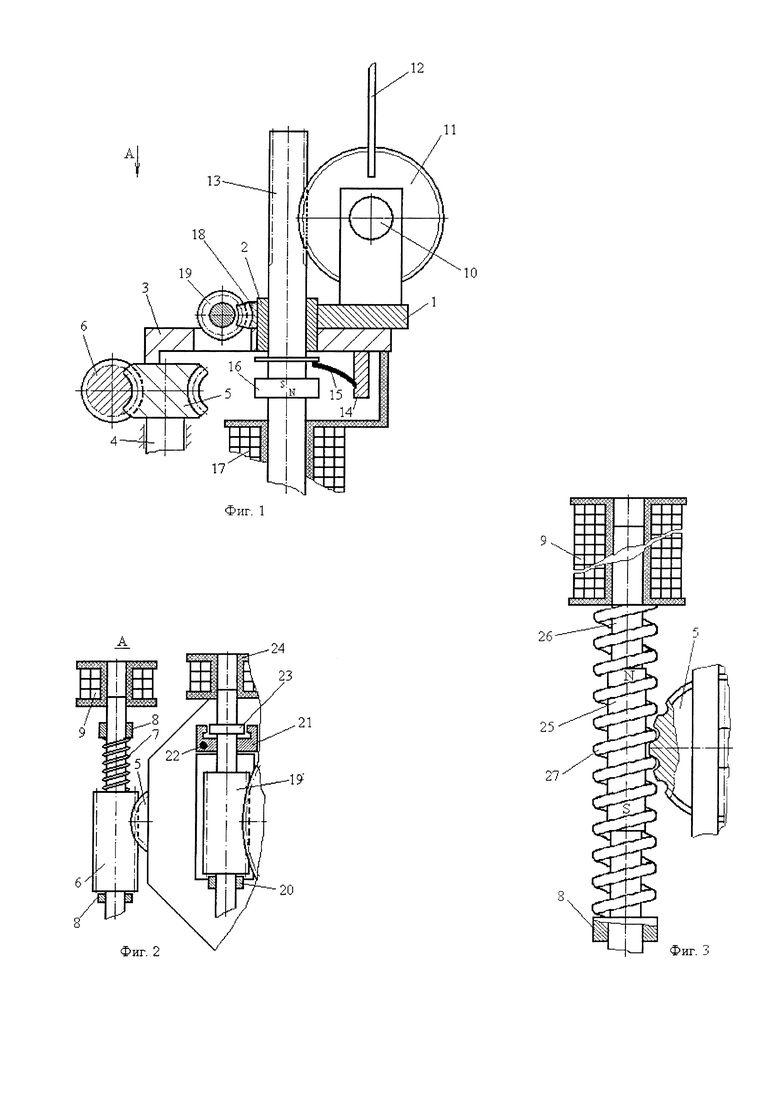
На фиг. 1 изображена схема механизма зеркала заднего вида. На фиг. 2. изображен вид А механизма. На фиг. 3 изображен соленоид, реализующий функцию опоры червяка, изготовленного в виде вала с охватывающей его пружиной.
Механизм зеркала заднего вида содержит платформу 1, установленную с возможностью поворота на втулке 2, неподвижно закрепленной на основании 3 корпуса, которое может быть установлено в опорах с возможностью вращения посредством, выполненных заодно с ним оси 4 и шестерни 5, сопряженной с червяком 6, поджатого пружиной 7 к одной из опор 8, имеющим в последних возможность вращения и осевого перемещения и кинематически связанным с первым электродвигателем (не показан) и соленоидом 9. На оси 10 платформы с возможностью поворота установлено зубчатое колесо (или сектор) 11 с держателем 12 зеркала, взаимодействующее с червяком 13, который установлен во втулке 2 с возможностью вращения и осевого перемещения, поджат к упору (не показан) закрепленной в держателе 14 основания 3 пружиной 15 и имеет жестко установленный на оси, кинематически связанной с закрепленным на основании 3 вторым электродвигателем (не показан), магнит 16, имеющий возможность взаимодействия с соленоидом 17. Зубчатый сектор 18 платформы 1 сопряжен с червяком 19, который соединен с третьим электродвигателем (не показан), размещенным на основании 3, имеет возможность вращения и осевого перемещения в опорах 20 и 21, последняя из которых выполнена в виде имеющего магнитоуправляемый датчик 22 (например геркон) магнитопровода, в зазоре которого размещен магнит 23, жестко закрепленный на оси червяка 19 и имеющий возможность взаимодействия с соленоидом 24. Червяк 6 может быть выполнен в виде вала 25, имеющего больший диаметр, чем ось 26, на котором закреплена и охватывает его, по крайней мере, одна витая пружина 27, имеющая возможность зацепления с колесом 5, концы которой соприкасаются с ограничителями ее осевого перемещения - опорой 8 и выполненным в виде опоры соленоидом 9, при этом вал 25 может быть выполнен намагниченным и иметь возможность взаимодействия с соленоидом 9.
Работает механизм зеркала заднего вида следующим образом.
Для поворота зеркала заднего вида; укрепленного на держателе 12, вокруг горизонтальной оси включают второй электродвигатель, в результате чего во втулке 2 начинает вращаться червяк 13, который посредством червячного колеса 11 поворачивает держатель 12 вокруг оси 10 (фиг. 1). При достижении зеркалом нужного положения выключают второй электродвигатель, обеспечивая за счет самоторможения передачи фиксацию зеркала.
Для поворота зеркала вокруг вертикальной оси включают третий электродвигатель, благодаря чему начинают вращаться червяк 19 и червячный зубчатый сектор 18 вместе с платформой 1, которая начнет поворачиваться вокруг втулки 2, при этом червячное колесо 11 будет своими зубьями скользить по винтовой поверхности червяка 13 (фиг. 1, 2). Так как угол поворота платформы 1 небольшой, а передаточное отношение от червяка 13 до колеса 11, наоборот, большое, то колесо 11 будет практически стоять на месте при повороте платформы, в результате чего также не будет перемещаться держатель 12 с зеркалом вокруг оси 10, т.е. выполненная ранее вертикальная регулировка зеркала сохранится. После достижения зеркалом нужного положения выключают третий электродвигатель. Заметим, что так как второй и третий электродвигатели размещены на основании 3, то механизм настройки зеркала получается максимально облегченным. Это позволяет использовать электродвигатели малой мощности и снижает энергетические затраты на перемещение зеркала, настройку которого можно легко «запоминать» по количеству оборотов червяков.
Для поворота корпуса (складывания) зеркала в нерабочее положение включают первый электродвигатель, установленный, например на двери (не показана) транспортного средства. В результате червяк с помощью шестерни 5 поворачивает основание 3 корпуса зеркала до нужного крайнего положения. Если в рабочем положении зеркало подвергается внешнему воздействию, например удару при задевании зеркалом препятствия во время движения, то основание 3 корпуса по действием внешней силы поворачивается на оси 4 в опоре. При этом шестерня 5, воздействуя на зубья червяка 6, вынуждает его двигаться вдоль оси в опорах 8, сжимая упругий элемент 7 (пружину) (фиг. 2). В результате этого энергия удара гасится, а возможные повреждения зеркала минимизируются. После прекращения внешнего воздействия пружина разжимается и основание 3 корпуса возвращается в исходное рабочее положение. Появляется также возможность складывания зеркала вручную, находясь вне автомобиля. Обратный возврат зеркала в рабочее положение может производиться как вручную, так и при помощи первого электродвигателя, который включают в обратном направлении вращения.
Червяк 6 (13, 19) может быть выполнен в упрощенном варианте в виде вала 25 с напрессованной на него пружиной 27 и намагниченным (фиг. 3). Если при этом концы пружины продлить до упора вправо и влево, то корпус зеркала может складываться от внешнего воздействия в обе стороны.
Если в процессе движения транспортного средства задним ходом появляется необходимость контроля положения заднего колеса относительно дорожного бордюра или других предметов, которые при о6ычном рабочем положении зеркала заднего вида не видны водителю, то последний (например путем нажатия кнопки на многофункциональном руле) подает напряжение на соленоид 17, который взаимодействуя с магнитом 16, перемещает червяк 13 вниз вдоль оси. В результате этого держатель 12 с зеркалом практически мгновенно «перепрыгивает» (поворачиваются вокруг оси 10) на заранее заданный угол (определяемый продольным ходом червяка) в положение, при котором у водителя появляется возможность визуального контроля движения заднего колеса. После прекращения маневра кнопка отпускается, и червяк 13 вместе с зеркалом под действием пружины 15 возвращаются в исходное рабочее положение.
При перестроении и необходимости контроля «слепой зоны» водитель сначала оценивает дорожную обстановку через зеркало заднего вида, находящееся в обычном рабочем положении. Затем при благоприятных условиях включает сигнал, оповещающий о предстоящем перестроении, и, например путем нажатия кнопки на многофункциональном руле, подает напряжение на соленоид 24, который взаимодействуя с магнитом 23, перемещает червяк 19 вдоль оси. В результате этого платформа 1, с держателем 12 и зеркалом практически мгновенно «перепрыгивает» (поворачиваются вокруг втулки 2) на заранее заданный угол (определяемый продольным ходом червяка) в положение, при котором у водителя появляется возможность визуального контроля «слепой зоны». При отсутствии помехи в указанной зоне водитель начинает маневр, после чего отпускает кнопку. В результате этого червяк 19 (и зеркало) возвращается в исходное положение благодаря взаимодействию магнита 23 с магнитопроводом опоры 21 или/и возвратной пружины.
Заметим, что при включении соленоида перемещение червяка 19 вместе с магнитом 23 вызывает изменение магнитного потока в магнитопроводе, что приводит к срабатыванию датчика 22, включающего звуковой (и/или световой) сигнал, оповещающий водителя о том, что зеркало не находится в обычном рабочем положении. При возврате зеркала в указанное положение сигнал прекращается.
Отметим также, что просмотр «слепой зоны» можно осуществлять и путем подачи напряжения на соленоид 9. В этом случае осуществляется поворот корпуса с зеркалом. Поскольку момент инерции корпуса значительно больше, чем платформы 1, то это потребует увеличения мощности соленоида 9 по сравнению с другими продольными приводами.
Внедрение изобретения позволит создать простой по конструкции и надежный механизм «прыгающего» зеркала заднего вида, позволяющий расширить функциональные возможности последнего и повысить эксплуатационные характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ЗЕРКАЛА ЗАДНЕГО ВИДА | 2016 |
|
RU2626429C1 |
| ПРИВОД ЗЕРКАЛА ЗАДНЕГО ВИДА | 2014 |
|
RU2551598C1 |
| МЕХАНИЗМ УБОРКИ-ВЫПУСКА ШАССИ САМОЛЕТА | 2015 |
|
RU2609573C1 |
| МЕХАНИЗМ ПРИВОДА РАДИОЛОКАТОРА | 2018 |
|
RU2688813C1 |
| РАЗДВИЖНАЯ ДВЕРЬ ЛИФТА | 2015 |
|
RU2609518C1 |
| ГОЛОВКА ДЛЯ АБРАЗИВОСТРУЙНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ | 2016 |
|
RU2621493C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2015 |
|
RU2610025C1 |
| МЕХАНИЗМ ПРИВОДА СТВОРКИ НИШИ ШАССИ САМОЛЕТА | 2015 |
|
RU2609554C1 |
| КРЕСЛО | 2015 |
|
RU2609543C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2016 |
|
RU2611675C1 |
Изобретение относится к транспортным средствам и может быть использовано для управления зеркалом заднего вида. Механизм зеркала заднего вида содержит основание корпуса, платформу, приводы. Приводы выполнены в виде червячных передач, кинематически связанны с зеркалом заднего вида и установлены с возможностью перемещения зеркала вокруг горизонтальной и вертикальной геометрических осей. По крайней мере первая червячная передача дополнительно снабжена первым продольным приводом, связанным с червяком. Червяк установлен в опоре вращения с возможностью перемещения вдоль своей оси. Достигается расширение функциональных возможностей и повышение эксплуатационных характеристик. 8 з.п. ф-лы, 3 ил.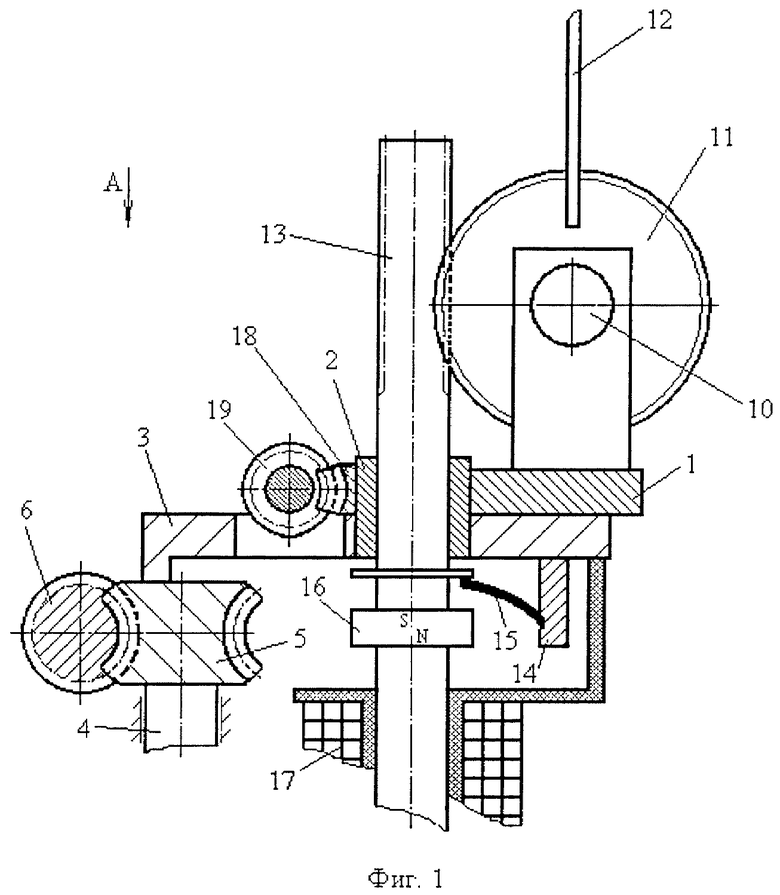
1. Механизм зеркала заднего вида, содержащий основание корпуса, платформу, приводы, выполненные в виде червячных передач, кинематически связанные с зеркалом заднего вида и установленные с возможностью перемещения зеркала вокруг его горизонтальной и вертикальной геометрических осей, отличающийся тем, что по крайней мере первая червячная передача дополнительно снабжена первым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси.
2. Механизм по п. 1, отличающийся тем, что и вторая червячная передача дополнительно снабжена вторым продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси.
3. Механизм по п. 1, отличающийся тем, что и третья червячная передача дополнительно снабжена третьим продольным приводом, связанным с червяком, который установлен в опоре вращения с возможностью перемещения вдоль своей оси.
4. Механизм по п. 1, отличающийся тем, что часть оси червяка выполнена из магнитного материала.
5. Механизм по п. 1, отличающийся тем, что опора выполнена в виде магнитопровода.
6. Механизм по п. 1, отличающийся тем, что продольный привод выполнен в виде соленоида.
7. Механизм по п. 1, отличающийся тем, что червяк выполнен намагниченным.
8. Механизм по любому из пп. 1, 5, отличающийся тем, что часть магнитопровода выполнена в виде магнитоуправляемого датчика.
9. Механизм по любому из пп. 1, 6, отличающийся тем, что катушка соленоида выполнена в виде опоры.
| ПРИВОД ЗЕРКАЛА ЗАДНЕГО ВИДА | 2014 |
|
RU2551598C1 |
| СПОСОБ РАБОТЫ ЗЕРКАЛА ЗАДНЕГО ВИДА | 2016 |
|
RU2626429C1 |
| DE 102006028070 A1, 04.01.2007 | |||
| DE 10083723 T1, 24.01.2002. | |||

