Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при конструировании грузоподъемников вилочных погрузчиков.
Прототипом является грузоподъемник погрузчика, содержащий неподвижную раму, на двух боковых вертикальных стойках которой смонтированы с возможностью перемещения стойки подвижной рамы, несущие грузовую каретку, которая связана цепной передачей с приводом перемещения, состоящим из двух гидроцилиндров, корпус каждого из которых установлен у неподвижной стойки, а штоки соединены между собой поперечной балкой, которая связана с подвижной рамой, причем на указанной поперечной балке выполнены отверстия для концов штоков, на каждом из которых выполнена резьба, зацепленная с регулировочной гайкой, которая расположена между поперечной балкой и корпусом гидроцилиндра, при этом регулировочная гайка выполнена разрезной и снабжена стяжным болтом, а по линии, касательной к окружности среднего диаметра резьбы штока и гайки, выполнено отверстие для установки фиксирующего штифта [Пат. РФ 2048431, МПК B66F 9/20, 1995].
Недостатками прототипа являются:
- сложная конструкция механизма перемещения грузовой каретки, обусловленная наличием большого количества деталей и узлов, что также ухудшает эксплуатационные характеристики;
- неудобство в эксплуатации, вызванное наличием гидравлического привода, требующего периодического контроля и замены жидкости привода;
- ограниченные функциональные возможности, связанные с отсутствием возможности поворота направляющих в горизонтальной плоскости.
Задачей изобретения является упрощение конструкции, расширение функциональных возможностей и улучшение эксплуатационных характеристик.
Задача решается тем, что в грузоподъемнике погрузчика, содержащем направляющие, несущие грузовую каретку, которая связана цепной передачей с механизмом перемещения, первая часть механизма перемещения выполнена, по крайней мере, в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси первого червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, которое жестко связано с направляющими, и сопряжено со вторым червяком, выполненным со сквозным осевым отверстием, ось которого совмещена с вертикальной осью поворота платформы, при этом вторая часть механизма перемещения выполнена в виде червячной пары, червяк которой размещен в отверстии второго червяка, а червячное колесо скреплено с установленной на одном конце направляющих ведущей звездочкой цепной передачи, ведомая звездочка которой размещена на другом конце направляющих, и размещено на оси зубчатого колеса.
Платформа выполнена в виде червячного колеса. Червяк выполнен глобоидным. Червячная передача выполнена самотормозящейся. Червяк намагничен в радиальном направлении. Червячное колесо выполнено заодно с первым червяком. Часть платформы в зоне червяков со скрещивающимися осями выполнена в виде масляной ванны.
Указанные отличительные признаки позволяют достичь следующих преимуществ по сравнению с прототипом.
Выполнение первой части механизма перемещения, по крайней мере, в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси первого червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, которое жестко связано с направляющими, и сопряжено со вторым червяком, выполненным со сквозным осевым отверстием, ось которого совмещена с вертикальной осью поворота платформы, и выполнение второй части механизма перемещения в виде червячной пары, червяк которой размещен в отверстии второго червяка, а червячное колесо скреплено с установленной на одном конце направляющих ведущей звездочкой цепной передачи, ведомая звездочка которой размещена на другом конце направляющих, позволяет размещать двигатели, перемещающие грузовую каретку и осуществляющие наклон и поворот направляющих, вне перемещающихся элементов (на неподвижном основании). Это упрощает конструкцию, снижает массогабаритные характеристики механизма перемещения, а также момент инерции движущихся частей, что уменьшает энергопотребление и дает возможность применять менее мощные двигатели, улучшая тем самым также и эксплуатационные характеристики. Кроме того, более благоприятным становится положение центра тяжести механизма перемещения при установке двигателей в зоне кузова погрузчика.
Размещение червячного колеса второй части механизма перемещения на одной оси с зубчатым колесом упрощает конструкцию и уменьшает ее массогабаритные характеристики.
Выполнение платформы в виде червячного колеса позволяет при необходимости поворачивать направляющие с грузовой кареткой вокруг вертикальной оси, что улучшает эксплуатационные характеристики.
Выполнение червяка глобоидным уменьшает массогабаритные характеристики, так как глобоидный червяк может воспринимать большие нагрузки, а червячное колесо, выполненное заодно с первым червяком, уменьшает число деталей и узлов механизма, что упрощает его конструкцию.
Выполнение червячной передачи самотормозящейся позволяет автоматически фиксировать направляющие и грузовую каретку в нужном положении после отключения двигателя, что упрощает конструкцию и улучшает эксплуатационные характеристики.
Намагничивание червяка в радиальном направлении позволяет использовать его при необходимости в качестве датчика угла поворота направляющих (положения каретки), разместив при этом рядом с ним, например, геркон или датчик Холла. Это упрощает конструкцию, повышает ее надежность и расширяет функциональные возможности. Выполнение части платформы в зоне червяков со скрещивающимися осями в виде масляной ванны улучшает условия их работы, повышает надежность и эксплуатационные характеристики.
Изобретение поясняется чертежами.
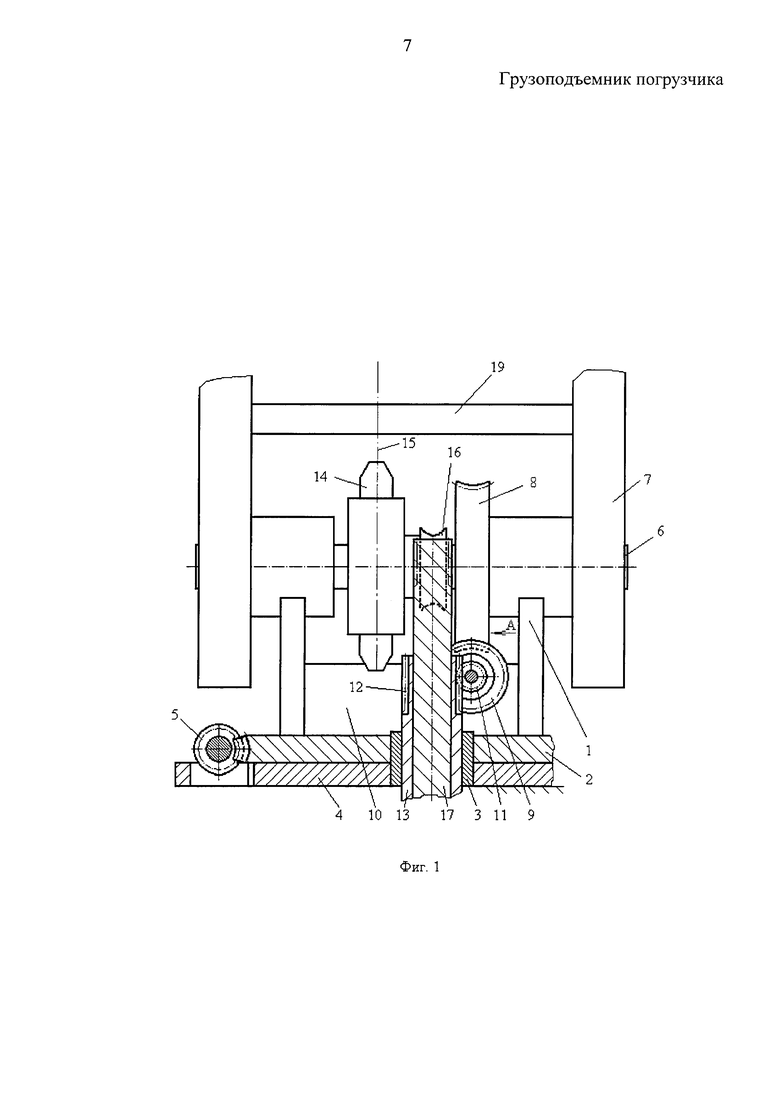
На фиг. 1 изображен грузоподъемник погрузчика.
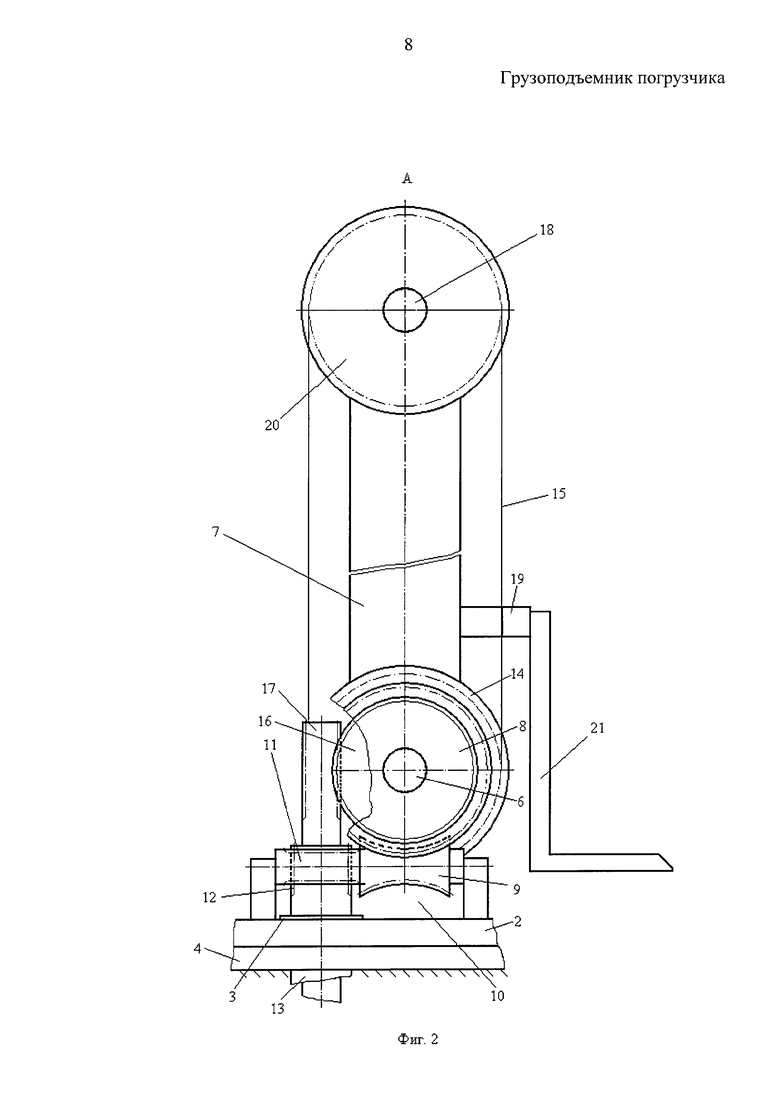
На фиг. 2 изображен вид А грузоподъемника.
Грузоподъемник погрузчика содержит стойки 1, закрепленные на платформе, выполненной в виде червячного зубчатого колеса 2, установленного с возможностью поворота на втулке 3, неподвижно закрепленной на основании 4, и сопряженного с червяком 5, соединенным с первым двигателем (не показан) и вращающимся в опорах основания. В стойках с возможностью вращения установлена ось 6, на которой неподвижно закреплены направляющие 7 и зубчатое колесо 8, взаимодействующее с зубьями глобоидного червяка 9, который установлен в пазу 10 стоек 1 с возможностью осевого вращения и имеет жестко закрепленное на оси червячное колесо 11, сопряженное с полым червяком 12, вал 13 которого установлен во втулке 3, с возможностью вращения и соединен со вторым двигателем (не показан), закрепленным на основании 4. На оси 6 установлены с возможностью вращения и скрепленные между собой ведущая звездочка 14 с цепью 15 и червячное колесо 16, которое сопряжено с червяком 17, размещенным с возможностью вращения в полом червяке 12 и соединенным с третьим двигателем (не показан). На оси 18, жестко закрепленной на конце направляющих 7, вдоль которых с возможностью перемещения установлена скрепленная с цепью 15 грузовая каретка 19, размещена с возможностью вращения ведомая звездочка 20. На грузовой каретке могут быть закреплены вилы 21.
Грузоподъемник погрузчика работает следующим образом.
Опускание или подъем вил 21 производят путем включения третьего двигателя, который посредством червяка 17 и червячного колеса 16 вращает ведущую звездочку 14 цепной передачи (фиг. 2). При этом происходит поворот на оси 18 ведомой звездочки 20 и перемещение цепи 15 заодно с грузовой кареткой 19 и вилами 21, фиксирование которых производят выключением двигателя. После этого передвижением погрузчика подводят вилы под поддон с грузом, приподнимают последний посредством указанного двигателя и перемещают к месту назначения.
В случае необходимости направляющие 7 можно повернуть (отклонить от вертикали) вокруг горизонтальной оси. Для этого включают второй двигатель, благодаря чему начинают вращаться вал 13 с червяком 12, который посредством зубчатого колеса 11 и связанного с ним червяка 9 поворачивает зубчатое колесо 8 с осью 6 и направляющими 7 (фиг. 1, 2). После отклонения направляющих до требуемого положения производят их фиксирование путем выключения двигателя.
При надобности можно осуществлять поворот колеса 2 (платформы) с направляющих 7, грузовой кареткой 19 и вилами 21 вокруг вертикальной оси. Для этого включают первый двигатель, в результате чего червяк 5 начинает вращаться и поворачивать на втулке 3 зубчатое колесо 2 вместе со стойками 1. При этом червячное колесо 11 своими зубьями будет скользить по винтовой поверхности неподвижного червяка 12 (обкатываться вокруг него) и поворачиваться. Поскольку угол поворота зубчатого колеса 2 относительно небольшой, а передаточное отношение от червяка 12 до зубчатого колеса 8, наоборот, большое, то колесо 11 будет практически стоять на месте при повороте платформы, тем более не будет перемещаться зубчатое колесо 8 с осью 6 и направляющими 7. При достижении вилами нужного положения в горизонтальной плоскости выключают первый двигатель, обеспечивая за счет самоторможения червячной передачи фиксацию платформы. Платформу в зоне червяков можно сделать в виде масляной ванны, что облегчит их работу.
В случае необходимости вращение направляющих 7 вокруг вертикальной и горизонтальной осей, а также подъем или опускание грузовой каретки 19 с вилами 21 можно производить одновременно тремя двигателями.
Заметим, что, так как двигатели могут быть размещены сбоку от поворотной платформы, то она вместе с направляющими получается максимально облегченной и с малым моментом инерции, что позволяет использовать для ее поворота и управления грузовой кареткой двигатели малой мощности. Кроме того, размещенные сбоку платформы двигатели смещают центр тяжести в сторону погрузчика, что позволяет увеличить длину (вылет) вил. Упрощается также и управление этими двигателями, поскольку они находятся на неподвижном основании 4.
Внедрение изобретения позволит создать простой по конструкции, надежный и удобный в эксплуатации грузоподъемник погрузчика, который потребляет относительно мало энергии на перемещение груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗДВИЖНАЯ ДВЕРЬ ЛИФТА | 2015 |
|
RU2609518C1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |
| АВТОМАТ ЗАРЯЖАНИЯ ПУШКИ ТАНКА | 2015 |
|
RU2602005C1 |
| КОНВЕЙЕР ДЛЯ СПАСЕНИЯ ЛЮДЕЙ ПРИ ПОЖАРЕ | 2015 |
|
RU2615253C1 |
| МЕХАНИЗИРОВАННАЯ АППАРЕЛЬ | 2015 |
|
RU2601487C1 |
| ДВЕРЬ-ТРАП САМОЛЕТА | 2015 |
|
RU2616098C1 |
| МОСТОУКЛАДЧИК | 2015 |
|
RU2600245C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТЕПЛОВОЙ И ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2554168C1 |
| МЕХАНИЗМ ПРИВОДА СТВОРКИ НИШИ ШАССИ САМОЛЕТА | 2015 |
|
RU2609554C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ СТВОРОК ВОРОТ | 2012 |
|
RU2499872C1 |
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при конструировании грузоподъемников вилочных погрузчиков. Опускание или подъем вил (21) производят путем включения двигателя, который посредством червяка (17) и червячного колеса (16) вращает ведущую звездочку (14) цепной передачи. При этом происходит поворот на оси (18) ведомой звездочки (20) и перемещение цепи (15) заодно с грузовой кареткой (19) и вилами (21), фиксирование которых производят выключением двигателя. Для отклонения направляющих (7) от вертикали включают двигатель, поворачивающий вал (13) с червяком (12), который посредством зубчатого колеса (11) и связанного с ним червяка (9) вращает зубчатое колесо (8) с осью (6) и направляющими (7). После отклонения направляющих до требуемого положения производят их фиксирование путем выключения двигателя. Поворот колеса (2) с направляющими (7), грузовой кареткой (19) и вилами (21) вокруг вертикальной оси осуществляют двигателем, вращающим червяк 5, который перемещает на втулке (3) зубчатое колесо (2) вместе со стойками. При достижении вилами (21) нужного положениям горизонтальной плоскости выключают этот двигатель, обеспечивая за счет самоторможения червячной передачи фиксацию платформы. Изобретение обеспечивает упрощение конструкции, расширение функциональных возможностей и улучшение эксплуатационных характеристик. 6 з.п. ф-лы, 2 ил.
1. Грузоподъемник погрузчика, содержащий направляющие, несущие грузовую каретку, которая связана цепной передачей с механизмом перемещения, отличающийся тем, что первая часть механизма перемещения выполнена, по крайней мере, в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, которое жестко закреплено на оси первого червяка, размещенного на платформе и взаимодействующего с зубчатым колесом, которое жестко связано с направляющими, и сопряжено со вторым червяком, выполненным со сквозным осевым отверстием, ось которого совмещена с вертикальной осью поворота платформы, при этом вторая часть механизма перемещения выполнена в виде червячной пары, червяк которой размещен в отверстии второго червяка, а червячное колесо скреплено с установленной на одном конце направляющих ведущей звездочкой цепной передачи, ведомая звездочка которой размещена на другом конце направляющих, и размещено на оси зубчатого колеса.
2. Грузоподъемник по п. 1, отличающийся тем, что платформа выполнена в виде червячного колеса.
3. Грузоподъемник по п. 1, отличающийся тем, что червяк выполнен глобоидным.
4. Грузоподъемник по п. 1, отличающийся тем, что червячная передача выполнена самотормозящейся.
5. Грузоподъемник по п. 1, отличающийся тем, что червяк намагничен в радиальном направлении.
6. Грузоподъемник по п. 1, отличающийся тем, что червячное колесо выполнено заодно с первым червяком.
7. Грузоподъемник по п. 1, отличающийся тем, что часть платформы в зоне червяков со скрещивающимися осями выполнена в виде масляной ванны.
| US 3165217 A1, 12.01.1965 | |||
| Грузоподъемное передвижное устройство с вилочным захватом | 1957 |
|
SU117363A1 |
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 1991 |
|
RU2048431C1 |
| Захват промышленного робота | 1985 |
|
SU1310202A1 |
| ПОДЪЕМНЫЙ КРАН СО СКЛАДЫВАЮЩЕЙСЯ СТРЕЛОЙ | 2014 |
|
RU2566576C1 |
| US 5163570 A1, 17.11.1992. | |||

