Изобретение относится к области формирования информационного ресурса мишенной и фоно-целевой обстановки в экспресс-режиме при отработке задач по защите надводного корабля от противокорабельных ракет (ПКР) и бомб с комбинированными головками самонаведения (ГСН), оценки эффективности средств РЭБ и определения временных характеристик их действия при ограниченных временных параметрах подлета противокорабельных ракет, к технике измерения физических полей защищаемых кораблей, снижения их заметности за счет применения маскировочных материалов, отработке способов защиты надводного корабля (НК) штатными средствами РЭБ с учетом их совместного применения, выработке рекомендаций боевого использования средств РЭБ в условиях одновременного применения других контуров защиты или выбора приоритета одного из них.
Изобретение относится к рубрике Отражающие мишени, например, мишени, отражающие радиолокационные лучи; активные мишени, излучающие электромагнитные волны F41j 2/00; активные мишени, излучающие инфракрасное излучение F41J 2/02. В диапазоне работы радиолокационных средств к разделу Измерение мощности радиотехническими способами G01S; Измерение с индикацией на экране ЭЛТ G01S 3/84; Измерение на принципе отражения радиоволн G01S 13/02. В диапазоне работы оптико-электронных средств к рубрике Фотометрия, экспозитометры, действующие по принципу сравнения с эталонным световым излучением или электрической величиной G01j 1/00, способом сравнения с поверхностью эталонной яркости G01J 1/14/.
Изобретение охватывает область техники определения характеристик в экспресс-режиме мишенной и фоно-целевой обстановки в диапазонах спектра электромагнитных волн современных комбинированных ГСН ПКР и бомб и охватывает все действия по исследованиям яркостных характеристик защищаемых объектов, материалов, покрытий, средств оптической маскировки, ложных целей в оптическом диапазоне спектра. Определение уровней яркости целей и фонов осуществляют путем ослабления сигналов на входе фотоприемного устройства до порогового уровня чувствительности устройства при помощи ослабляющих фильтров и визуальной регистрации достижения этого уровня на мониторе измерительного устройства путем сравнения полей яркости целей, фонов и эталонных отражателей. Причем в качестве фотоприемных устройств для измерений могут быть использованы бытовые цифровые фотоаппараты, видеокамеры, тепловизоры, лазерные дальномеры, работающие в тех же спектральных диапазонах, что и аналогичные средства обнаружения противника.
В области определения характеристик радиолокационных объектов, целей, ложных целей, маскировочных мероприятий, в частности, измерения эффективной поверхности рассеяния (ЭПР) в интересах радиоэлектронной борьбы проводят в экспресс - режиме при естественной фоновой обстановке, сравнительные величины значений отражательных характеристик эталона, объектов и искусственно создаваемых целей определяют штатной корабельной радиолокационной станцией, поочередно ослабляют сигналы от этих целей аттенюатором, встроенным в каскады схем усиления промежуточной частоты, не подвергнутые временной регулировке усиления и отградуированные в логарифмическом масштабе, визуально регистрируют на экране используемой радиолокационной станции порог обнаружения отметок от целей и определяют разницу уровней сигналов от этого порога и эталона по шкале аттенюатора, соответствующих эффективной поверхности рассеяния в м2.
В связи с кратковременностью процесса от обнаружения ПКР до подлета к цели (защищаемому кораблю) особенно с появлением гиперзвуковых ракет, зависящего от скорости полета и ЭПР ракеты, метеоусловий, взаимного расположения объектов актуальными являются временные параметры своевременности и очередности действий корабельных операторов, срабатывания программируемых устройств, автоматических средств, выход на рабочий режим создаваемых помех и ложных целей, время их эффективного действия, влияние параметров создаваемых целей на физическое поле корабля.
Решение вопроса защиты корабля в современных условиях может проводиться путем отработки задачи формирования мишенной позиции для ракетно-артиллерийских стрельб. Привлечение современных средств позиционирования ГЛОНАСС, GPS, СЕВ и приборов визуализации результатов измерений позволит своевременно реагировать на выработку рекомендаций по доработке и использованию средств РЭБ, измерительной техники.
С появлением гиперзвукового оружия повышается роль роботизации хронометрии действий и событий при защите корабля. Контроль функционирования приборов и средств РЭБ и других контуров защиты может осуществляться введением устройств и каналов телеметрии. Кроме того, своевременная информация обеспечит условие «не ухудшать» функционирование других средств и значительно повысит эффективность формирования мишенной позиции.
Измерение физических поле НК, объектов, целей, обустройство мишенной позиции с целью отработки задачи защиты корабля от существующих и перспективных ПКР проводят силами специально созданных лабораторий, ведомственных полигонов. Основная задача всех измерительных служб - добиться единства измерений, аттестовать (паспортизовать)объекты, цели, изделия в условиях приближенных к условиям применения комбинированных ГСН, обосновать мероприятия по снижению и изменению физических полей защищаемых объектов и кораблей. Так создан Морской научно - исследовательский испытательный полигон ВМФ для исследования и контроля физических полей кораблей и судов [1]. Работа выполнялась ФГУП «ЦНИИ им. акад. А.Н. Крылова». В состав полигона входят радиолокационные измерительные комплексы, стенды тепловых полей, стенды гидродинамического и магнитного полей, вспомогательные средства измерений, опорные излучатели, эталоны. Предусмотрены требования по фиксации гидрометеорологических условий при проведении измерений. Для выработки рекомендаций по снижению физических полей кораблей и исследования поглощающих и маскирующих материалов был создан полигон электродинамического моделирования [2].
Разрабатываются радиозащитные строительные материалы, инновационные наноматериалы для эффективной маскировки и снижения радиолокационной заметности военной техники. Для отработки новых средств снижения физических полей объектов, их заметности, совершенствования приемов их использования оценки маскировочных материалов проводят сравнительные измерения с привлечением мобильных и стационарных средств[3-5],практическое их использование исследуют на мишенных позициях.
Реально для отработки задач защиты кораблей от ПКР в морских условиях создают облик сложной мишенной обстановки путем расстановки по плану кораблей-целей, корабельных щитов, уголковых отражателей, морских дымовых шашек (МДШ) других ложных целей на ограниченном участке морской поверхности. Мишенные позиции могут быть как активными - с огневыми средствами и средствами РЭБ, так и пассивными. Цель таких испытаний - проведение экспресс-измерений физических полей объектов и ложных целей на естественном фоне, проведение тренировок и учений, как на стоянке, так и в море, оценка эффективности разрабатываемых средств РЭБ, а также обеспечение подготовки и расстановки мишенной обстановки при оценке приоритетности выбора целей ГСН ПКР. [6].
В современных условиях ведение боевых действий не представляется без средств РЭБ. Поэтому государства активно создают полигоны радиоэлектронной борьбы, где детально оценивают функционирование радиоэлектронных средств в условиях противодействия при имитации одиночного, группового или массированного налета. Отмечается отсутствие функционирующей в системе службы единого времени (СЕВ) порядка регистрации истинных координат целей, прикрытых средствами РЭБ. Так, представленный [7] полигонный исследовательский комплекс (ПИК) для проведения натурных и экспериментальных работ с радиолокационной станцией (РЛС) самолета-истребителя включает в себя: специализированный мобильный контейнер, оборудованный автономными системами жизнеобеспечения, радиолокационный прицельный комплекс самолета МиГ-29, аппаратуру визуализации в реальном масштабе времени и регистрации параметров этого комплекса с привязкой к GPS-времени для определения координат целей, аппаратуру командной радиосвязи и телекодовой передачи данных.Аппаратура регистрации и визуализации включает в себя устройство сопряжения и персональный компьютер. Задачи аппаратуры: прием цифровой информации, преобразование ее к интерфейсу USB, отображение разовых команд в реальном масштабе времени, получение исходных данных для оценки эффективности защиты летательных аппаратов от авиационных управляемых ракет с активными и полуактивными радиолокационными головками самонаведения. Характеристики и параметры движения имитируемых целей максимально приближены к реальным: диапазон ЭПР -от 0.5 м2 (крылатая ракета) до 50 м2 (самолет транспортной авиации); диапазон дальностей- от 1 до 100 км; диапазон скоростей сближения с целью- от 50 до 1000 м/с.Изменение дальности имитируемой цели синхронизируется с текущим значением скорости сближения. Предусмотрена цифровая обработка информации и передача ее для дальнейшей обработки.
Известен патент РФ на изобретение «Формирователь опорных сигналов частоты и времени» [8].Формирователь имеет блоки приема эталонных сигналов времени.
Известен патент РФ на изобретение «Мобильная многоканальная радиоприемная аппаратная» [9]. Аппаратная в составе имеет приемную аппаратуру, сервер связи, компьютер, аппаратуру навигации и блоки формирования сигналов СЕВ, вывод информации потребителям.
Известен патент РФ на изобретение «Способ комплексного мониторинга и управления состоянием многопараметрического объекта» [10]. Аппаратура производила измерения параметров в заданное время, формирование матриц состояния, формирование управляющих решений и передачу их на средства воздействия, выполняемых в ходе мониторинга. Этот патент может быть рассмотрен как прототип.
Известен патент РФ на изобретение «Способ измерения яркостных характеристик объектов в оптическом диапазоне спектра и устройство для его осуществления» [11]. Изобретение предназначено для исследования яркостных характеристик объектов, ложных целей, средств оптической маскировки в видимом и инфракрасном диапазонах спектра с целью оценки заметности объектов на окружающем фоне. Изобретение может использоваться для формирования информационного ресурса мишенной и фоно-целевой обстановки в оптическом диапазоне спектра.
Известен патент РФ на изобретение «Способ измерения эффективной поверхности рассеяния объектов в экспресс- режиме в условиях естественного фона радиолокационными средствами и устройство для его осуществления» [12]. Изобретение предназначено для проведения экспресс-измерений ЭПР объектов и ложных целей на естественном фоне, проведения тренировок и учений, как на стоянке, так и в море, а также обеспечение подготовки и расстановки мишенной позиции при оценке приоритетности выбора целей радиолокационной ГСН ПКР.
Рассмотренные материалы показывают, что измерение характеристик объектов, целей, маскировочных материалов проводится в узких спектральных диапазонах для оптического или радиолокационного диапазонов, привязываясь к какой-либо ГСН. Для этого используют специализированную аппаратуру, создают стационарные и мобильные лаборатории, занимаются вопросами снижения физических полей целей. Рассматривался вопрос «Формирования радиолокационной мишени для имитации надводного корабля»[13]. Показано, что построение радиолокационной мишени на основе только одного отражателя будет недостоверным в любом секторе ракурсов.
Формирование информационного ресурса мишенной и фоно-целевой обстановки для практической работы в повседневной деятельности, учебных целях, тренировок предлагается как вариант проводить комплексно в экспресс-режиме, в спектральных диапазонах работы ГСН ПКР противника, штатной аппаратурой и силами штатных операторов двумя этапами. На первом этапе замеряют характеристики объектов, входящих в мишенную позицию, в статике, т.е. без привлечения сбрасываемых, выстреливаемых и других средств непосредственно влияющих на физическое поле защищаемого корабля в оптическом диапазоне (визуальном, телевизионном, инфракрасном, лазерном) и радиолокационном диапазоне. На втором этапе учитывается динамика развития событий -время обнаружения и кратковременность подлета ПКР к цели, своевременность реакции, динамика выхода на режим, время эффективного действия всех задействованных средств защищаемого корабля, исследуется изменение поля защищаемого корабля от постановки ложных целей оптического и радиолокационного диапазонов. Процесс измерения характеристик целей и объектов опирается на показания эталонов и опорных отражателей и соответствует правилам инструментальной проверки.
В тоже время целесообразно использовать еще один вариант получения ценной информации в экспресс-режиме, характеризующей мишенную позицию. Используя известные приборы с элементами визуализации -приборы ночного видения высокой чувствительности, низкоуровневые телевизионные камеры, РЛС с измерительным каналом можно наглядно показать какая цель отражает «больше-меньше». Например, борт, облученный лазерным подсветчиком или ложная лазерная цель, облученная комплексом лазерных оптических помех, в относительных единицах, ЭПР корабля или ЭПР мишени, ЭПР корабля или ЭПР нескольких снарядов помех, в квадратных метрах.
Измерения временных параметров подготовки к работе и временя эффективного действия исследуемых объектов мишенной и фоно-целевой обстановки проводят существующими измерительными средствами, которым присущи недостатки - аппаратура специализированная, для обслуживания требуются специально обученные люди, слабая визуализация результатов измерений. Рассмотренные выше методы могут повысить эффективность подготовки мишенной позиции.
Если стационарные цели можно замерять «без ограничения» по времени, то замер временных параметров приведения в действие выстреливаемых помех и сбрасываемых устройств ограничен временными рамками и ресурсными (работными) показателями.
Предполагается проведение подготовки мишенной позиции под эгидой руководителя испытаний. После того как будут распределены функции операторов защищаемого корабля и корабля-измерителя может быть рассмотрен и предложен вариант автоматизации процесса определения временных отсчетов и интервалов работы средств и контуров защиты корабля: при включении на измерительном комплексе в плановую работу лазерного дальномера или лазерного подсветчика станцией обнаружения лазерных излучений (СОЛИ) защищаемого корабля фиксируется излучение и классифицируется как «сигнал» в первом случае или« цель в угрожаемом секторе» во втором, в случае выявления «угрозы» вырабатывается (выдается) команда на перевод запланированных средств защищаемого корабля из дежурного режима в рабочий с фиксацией данных ГЛОНАСС и СЕВ, всех команд и откликов исполнительных устройств и механизмов, включенных в план работы, передачей данных расположения объектов относительно поля зрения измерительного комплекса на пункт управления, на измерительном комплексе определяют работные времена средств (время подготовки выстрела, время включения, время формирования, время эффективного действия) и физические поля создаваемых кратковременно действующих ложных целей и их влияние на изменение физических полей защищаемого корабля в диапазоне работы комбинированных ГСН, вырабатывают предложения как по периодичности постановки возобновляемых ложных целей при отражении предполагаемого группового или массированного налета ракет, для обеспечения превышения уровня сигналов от ложных целей над сигналами от защищаемого объекта, так и по корректировке мишенной позиции, фоно-целевой обстановки, выработке требований к средствам РЭБ и другим контурам защиты корабля.
Сущность заявляемого изобретения заключается в следующем. Технической задачей настоящего изобретения является расширение возможностей комплексного, многодиапазонного решения процесса формирования информационного ресурса мишенной и фоно-целевой обстановки при отработке способов защиты НК от ПКР с комбинированными ГСН и оценке эффективности разрабатываемых средств РЭБ, выработке рекомендаций боевого использования средств РЭБ на разных кораблях, в разных условиях на меняющейся фоно-целевой обстановке. Причем синхронность производства измерений в оптическом и радиолокационном диапазонах достигается применением современных средств позиционирования как штатной аппаратуры, так и привлекаемой аппаратуры широкого применения работающей в том же спектральном диапазоне, что и ГСН. Надо отметить, что возможность применения оптической аппаратуры широкого применения показана в патенте [11].
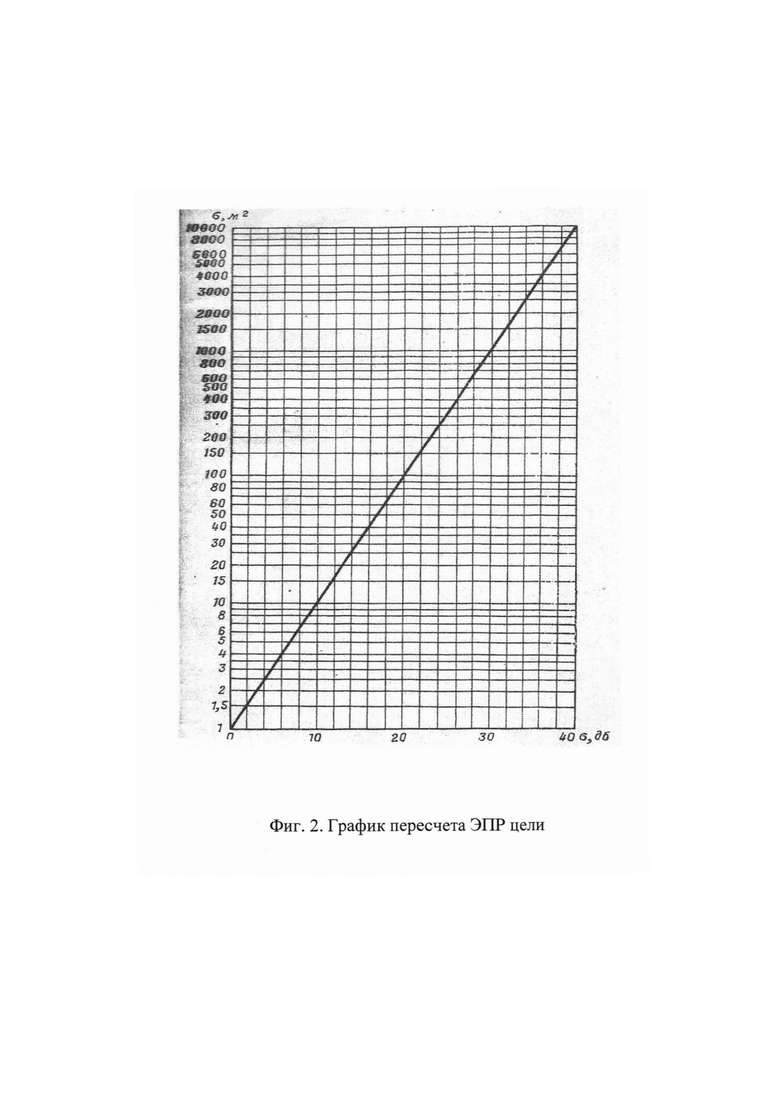
Общая картина мишенной и фоно-целевой обстановки представлена на фиг. 1, где показаны защищаемый корабль (1) с установленными на нем штатными средствами - стация обнаружения лазерных излучений (СОЛИ) (2), комплекс лазерных оптических помех (КЛОП) (3), комплекс выстреливаемых оптических и радиолокационных помех (КВП) (4). В мишенный комплекс входит штатная корабельная система водяного пожаротушения (СВП), надувные уголковые отражатели (НУО) и морские дымовые шашки (МДТТТ) (5).В мишенный комплекс также входят артиллерийский щит (6) и эталонные отражатели (7).
Составной частью общей картины является измерительный комплекс фиг. 1. В него входят: измерительная РЛС на базе штатной корабельной станции (9), возможность использования таких станций показана в патенте [12], и оптические приборы, обеспечивающие измерения во всем оптическом спектре,- лазерный дальномер (10), лазерный подсветчик (И), прибор ночного видения (ПНВ) высокой чувствительности (12), низкоуровневая телевизионная камера НТВК (13), тепловизор (14), видеорегистратор (15), фоторегистратор (15).
Обе составные информационные части мишенной позиции объединены информационной аппаратурой СЕВ, ГЛОНАСС, GPS (8).
Технический результат достигается тем, что для визуализации процесса измерений в оптическую составляющую измерительного комплекса вводят штатные (принятые на снабжение)лазерный дальномер и лазерный подсветчик, а также вводят высокочувствительные приборы ночного видения (ПНВ) [14] на основе электронно-оптических преобразователей (ЭОП) и низкоуровневые телевизионные системы (НТВС) [15] и более совершенные - ЦПВИ - цифровые приборы визуализации изображений на основе ПЗС - прибора с зарядовой связью (ЭОП отсутствует) [16] для визуального обнаружения лазерных сигналов с длинной волны до 1-2 мкм и компьютерной обработкой сигналов для их тиражирования. Приборы мишенной позиции и измерительного комплекса связаны системами спутниковой навигации [17] и службой единого времени [18].
На защищаемом корабле однозначно предполагается присутствие станции обнаружения лазерных излучений (СОЛИ) поз. 2, фиг. 1, комплекса лазерных оптических помех поз. 3 фиг. 1, (КЛОП)-МДМ-2Э «для постановки удаленной от защищаемого объекта ложной лазерной цели» [19], комплекса выстреливаемых помех (КВП) [20] поз. 4, системы водяного пожаротушения (СВП) [21], влияющей на отражательные характеристики корабельных поверхностей в оптическом диапазоне, сбрасываемых ложных средств радиолокационного и оптического диапазонов - надувных уголковых отражателей (НУО), морских дымовых шашек (МДШ) поз. 5, фиг. 1. Последовательная работа этих устройств фиксируется средствами визуализации с привлечением спутниковых систем навигации (ССН) [17] и службы единого времени(СЕВ) [18].
Технический результат заключается в том, что включение средств помех, выход на рабочий режим, время эффективного действия их увязывают с дистанцией обнаружения ПКР и подлетным временем ракеты к цели.
Техническое решение измерения физических полей объектов, ложных целей, фонов в визуально-оптическом, телевизионном, лазерном, инфракрасном диапазонах показано в патенте [11]. Рассмотрена возможность привлечения в качестве измерителей оптико-электронных устройств, аналогичных устройствам обнаружения, по отношению к которым оценивается оптическая заметность исследуемых объектов, работающих в тех же спектральных диапазонах и обладающих фиксированным уровнем пороговой чувствительности.
В радиолокационном диапазоне показана возможность привлечения к измерениям ЭПР объектов, целей, ложных целей, маскирующих устройств штатных корабельных радиолокационных станций со штатным составом радиометристов [12] с вводом в тракт промежуточной частоты аттенюатора с фиксацией пороговых уровней обнаружения эталонов и исследуемых объектов. Причем корабельные РЛС привлекаются тех же спектральных диапазонов, что и диапазоны излучения ГСН ПКР.
Важным параметром процесса измерений является быстродействие. Для сокращения времени измерения ЭПР возможен переход на аттенюаторы с ручным управлением, на фиксированные аттенюаторы или на аттенюаторы с электронным управлением [22]. Погрешность установки ослабления аттенюаторов с электронным управлением 3-5% от наибольшего ослабления. Время переключения этих аттенюаторов исчисляется десятками микросекунд.
Сущность изобретения как технического решения заключается в применении существующих средств измерения и контроля, а также разрабатываемых средств визуализации измерений для определения временных параметров, анализа и выработки команд на включение в работу средств РЭБ. Привлекают к сбору информации по включению, переходу средств из режима в режим, временных параметров эффективного действия кроме операторов телеметрические средства и датчики.
Существенным признаком новизны является возможность применения способа при осуществлении тестирования готовности средств РЭБ и других контуров защиты корабля к практическому использованию в ограниченных временных рамках. В технической литературе в полном объеме способ не нашел отражения.
В уровне техники не выявлена известность влияния на достижение указанного технического результата преобразований, предусматриваемых совокупностью признаков, включенных в формулу изобретения. Следовательно, изобретение соответствует условию
патентоспособности«изобретательский уровень».
Технический результат, достигаемый при осуществлении изобретения, выражается в получении тактико-технических характеристик исследуемых средств РЭБ с точными временными параметрами их развития и времени эффективного действия и объектов мишенной позиции на реальном фоне, выдаче рекомендаций по их использованию, проведению тренировок и учений, а также тиражированию результатов в электронном виде для учебных целей, что указывает на промышленную применимость.
Изобретение поясняется чертежом.
На фиг. 1 представлен состав средств и аппаратуры для исследования физических полей объектов, мишенной и фоно - целевой обстановки, проверки на эффективность новых средств РЭБ, защищенности НК от ПКР с комбинированной ГСН.
В состав полигона - мишенной позиции входят: 1 - Защищаемый НК. 2 - Станция обнаружения лазерных излучений(СОЛИ). 3 - Комплекс лазерных оптических помех (КЛОП). 4 - Комплекс выстреливаемых помех (КВП). 5 - Система водяного пожаротушения (СВП), сбрасываемые ложные цели - надувные уголковые отражатели (НУО), морские дымовые шашки (МДШ). 6 - Артиллерийский щит.7 - Эталонные отражатели и опорные излучатели. 8 - Аппаратура СЕВ, ГЛОНАСС, GPS.
В состав измерительного комплекса входят: 9 - НК с измерительной РЛС.10 - Лазерный дальномер. 11 - Лазерный подсветчик. 12 - Прибор ночного видения (ПНВ) высокой чувствительности. 13 - Низкоуровневая телевизионная камера (НТВК). 14 - Тепловизор. 15 - Видеорегистратор. 16 - Фоторегистратор. Также в состав входит аппаратура 8 - СЕВ, ГЛОНАСС, GPS.
Процесс измерения физических полей и временных параметров мишенных объектов может быть представлен двумя этапами:
1. Условно предварительный, с проверкой готовности операторов и аппаратуры. Измерение физических полей стационарных и малоподвижных объектов мишенной позиции и эталонов (в статическом режиме) в оптическом и радиолокационном диапазонах.
2. Измерение физических полей мишенной позиции и ложных целей с ограниченными временными параметрами в части приведения в дежурный и рабочий режимы, времени эффективного действия, своевременной классификации ГСН в оптическом и радиолокационном диапазонах, соответствия параметров эталонов и ложных целей параметрам защищаемого корабля, воздействие физических полей ложных целей на поле защищаемого корабля. Причем временные параметры увязывают с временем подлета к цели ПКР, бомб. Анализируют воздействия создаваемых ложных целей и помех, новых материалов и способов их применения на мишенную и фоно-целевую обстановку, вырабатывают рекомендации по формированию информационного ресурса для разных задач, учений, тренировок.
В статическом режиме из представленных на фиг. 1 средств защищаемого корабля задействованы все кроме Комплекса лазерных оптических помех (КЛОП) поз. 3 и Комплекса выстреливаемых помех (КВП) поз. 4.
Сбрасываемые ложные цели поз. 5 - надувные уголковые отражатели (НУО), морские дымовые шашки(МДШ) и систему водяного пожаротушения (СВП) проверяют в статике до динамических и во время динамических испытаний. Оценивают влияние средств друг на друга на ходу и на стопе корабля.
Измерение статических физических полей объектов в оптическом диапазоне в экспресс - режиме.
В описании изобретения «Способ измерения яркостных характеристик объектов в оптическом диапазоне спектра и устройство для его осуществления» [11] показана возможность оценки физических полей объектов мишенной обстановки силами штатных операторов корабельных средств.
В качестве показателей, характеризующих заметность объектов в видимом и инфракрасном диапазонах спектра, обычно используются значения контраста объектов на окружающем фоне К, определяемые как [22]:

где Вф и Во - соответственно значения яркостей фона и объекта в спектральном диапазоне измерений.
При использовании лазерных средств заметность объектов, в соответствии с ГОСТ [23], принято характеризовать значением коэффициента яркости поверхности объекта β, определяемым как отношение энергетической яркости облучаемой поверхности объекта к энергетической яркости идеального рассеивателя (эталона), находящегося в тех же условиях облучения.

где Во и Вэ - значения яркостей поверхностей объекта и эталона на длине волны излучения лазера.
В большинстве случаев задача исследования оптической заметности объектов сводится к измерениям значений яркости поверхностей исследуемого объекта, фона и эталона.
Известны два основных способа световых измерений [24]: субъективный, который называют также визуальным, и объективный (физический). При субъективном способе измерений приемником служит человеческий глаз, который используется, как правило, для сравнения полей яркости различных участков фотометрического поля, а при объективном используют физические приемники лучистого потока - фотоприемники. Для расширения пределов измерения в большинстве случаев используют светофильтры с известными коэффициентами пропускания. При этом в процессе измерений светофильтры подбирают таким образом, чтобы уровень входного сигнала попадал в пределы линейного участка амплитудной характеристики измерительного устройства.
Предлагаемая методика обеспечивает расширение номенклатуры средств, используемых для проведения измерений, вплоть до общедоступных бытовых приборов широкого распространения, в исключении необходимости градуировки измерительного устройства во всем диапазоне измеряемых величин, обеспечении возможности измерений как в лабораторных, так и в натурных условиях, удешевлении процесса проведения исследований.
Непосредственная регистрация полезного сигнала осуществляется с использованием фотоприемника, а измерения производятся с использованием человеческого глаза и набора ослабляющих фильтров. Фотоприемное устройство градуируют не во всем диапазоне измеряемых величин, а только по порогу чувствительности.
В качестве регистрирующего устройства применяют не специализированные фотометрические средства, а широко распространенные и относительно дешевые фотоприемные устройства, например цифровых фотоаппаратов, видеокамер, тепловизоров, лазерных дальномеров, спектральные характеристики чувствительности которых соответствуют характеристикам средств обнаружения.
Оценка оптической заметности объектов производится исходя из возможности их обнаружения фотографическими, телевизионными, тепловизионными или лазерными техническими средствами. Поэтому исследования яркостных характеристик объектов и фонов производятся в спектральных диапазонах работы этих средств. С учетом этого, наиболее предпочтительным является проведение измерений с использованием именно этих технических средств, т.е. сразу во всем спектральном диапазоне работы каждого из этих средств. С этой точки зрения в качестве фотоприемных устройств для измерений могут быть использованы бытовые цифровые фотоаппараты, видеокамеры, тепловизоры, лазерные дальномеры, работающие в тех же спектральных диапазонах, что и аналогичные средства обнаружения.
Возможность применения указанных приборов для проведения исследований по оценке заметности объектов обусловлена тем, что фотоприемные каналы этих приборов обладают присущими им пороговыми чувствительностями. С учетом этого, при использовании фотоаппаратуры, видеокамеры или тепловизора процесс измерения заключается в следующем. Используемый для проведения измерений прибор наводится на исследуемый объект, находящийся на окружающем фоне. Рядом с исследуемым объектом размещается эталонный отражатель, представляющий собой щит, одна часть которого окрашена белой краской, а вторая часть - черной краской с известными коэффициентами отражения и излучения в спектральном диапазоне измерений. Размеры эталонного отражателя таковы, что каждая из двух его частей превышает не менее чем в 15 раз размеры элемента разрешения измерительного устройства на дистанции измерений, т.е. не менее порога распознавания объекта человеческим глазом. Оператор глазом наблюдает на экране (мониторе отображения) используемого измерительного прибора изображение панорамы, включающей исследуемый объект, эталонный отражатель и фон. После этого перед объективом прибора устанавливается ослабляющий нейтральный фильтр с известным коэффициентом пропускания. Световой поток на входе фотоприемного устройства уменьшается. Устанавливается следующий ослабляющий фильтр и так далее, до тех пор, пока на экране (мониторе) используемого прибора глаз оператора не перестанет различать сначала черную часть эталонного отражателя, а потом область пространства, имеющую меньшую яркость (объект или фон). Признаком отсутствия различения является регистрируемое глазом равенство яркостей участков поля зрения, занимаемых черной частью эталонного отражателя и объектом или фоном (например, фоном). Это свидетельствует о том, что сигнал в этой области пространства достиг порогового уровня чувствительности прибора. В этом состоянии регистрируется общий (суммарный) коэффициент пропускания установленных ослабляющих фильтров, определяемый как произведение коэффициентов пропускания всех установленных фильтров. После этого оператор продолжает устанавливать ослабляющие фильтры до тех пор, пока глаз оператора не перестанет различать область пространства, имеющую большую яркость (например, объект). При этом также регистрируется суммарный коэффициент пропускания всех установленных фильтров. На основании этих измерений контраст объекта К определяется как:

где τф и τо - суммарные показатели ослабления фильтров, соответствующие порогам различения фона и исследуемого объекта.
В случае исследования значений коэффициентов яркости объектов с использованием лазерного дальномера методика измерений состоит в следующем. Лазерный дальномер наводится на исследуемый объект и производится измерение дальности до объекта. Оператор наблюдает наличие отсчета дальности на шкале дальномера. После этого перед входным окном приемного тракта дальномера устанавливаются ослабляющие фильтры до тех пор, пока не прекратится отсчет дальности по шкале дальномера. Признаком отсутствия отсчета дальности является появление нулевых отсчетов дистанции до объекта. Это свидетельствует о том, что входной сигнал достиг порога чувствительности фотоприемника. Регистрируется суммарный коэффициент пропускания установленных ослабляющих фильтров. После этого на месте исследуемого объекта перпендикулярно направлению наблюдения устанавливается эталонный отражатель с известным коэффициентом яркости. Лазерный дальномер наводится на белую часть эталонного отражателя и вновь устанавливаются ослабляющие фильтры до прекращения отсчета дальности. Также регистрируется суммарный коэффициент пропускания ослабляющих фильтров. Коэффициент яркости поверхности исследуемого объекта pt определяется как:

где τo и τэ - суммарные показатели ослабления фильтров, соответствующие порогам отсчета дальности до исследуемого объекта и эталонного отражателя;
βэ - значение коэффициента яркости поверхности эталонного отражателя.
Практическая реализация предлагаемого способа и возможность достижения заявляемого положительного эффекта подтверждаются широким распространением и доступностью используемых для проведения измерений технических средств, наличием серийно выпускаемых ослабляющих фильтров для различных спектральных диапазонов с широким диапазоном известных характеристик пропускания, апробацией предлагаемого способа в лабораторных и натурных условиях.
Поскольку оптическая заметность объектов в подавляющем большинстве случаев оценивается исходя из возможности их обнаружения оптико-электронными средствами разведки, работающими в видимом и инфракрасном участках оптического диапазона спектра, а также лазерными дальномерами и локационными устройствами, в качестве измерителей могут использоваться цифровые фотоаппараты, видеокамеры, приборы ночного видения, тепловизоры, а также лазерные дальномеры. При использовании таких измерителей отсчет показаний (порога регистрации изображения объекта, фона или дальности до цели) производится за счет одноэлементного или многоэлементного фотоприемника, мозаичного индикатора и человеческого глаза. Применение указанных измерителей позволяет производить измерения в тех спектральных диапазонах, в которых работают аналогичные средства обнаружения. Такие измерители находятся в массовом производстве, имеются в продаже, относительно дешевы и доступны. Каждое из упомянутых устройств обладает пороговой чувствительностью, которая определяет минимальный регистрируемый уровень сигнала. В связи с этим отпадает необходимость градуировки таких устройств во всем диапазоне их чувствительности и построения градуировочных графиков, что существенно упрощает процесс подготовки и проведения измерений. Высокая пространственная разрешающая способность подобных измерителей позволяет производить измерения удаленных и малоразмерных объектов как в лабораторных, так и в полевых условиях.
Устройство работает следующим образом. Оператор наводит поворотную станину в направлении на исследуемый объект. При этом в поле зрения прибора должны попадать также участок фона и эталонный отражатель. Изображение целей, попавших в поле зрения объектива измерительного устройства, оператор наблюдает на мониторе визуального отображения. После этого оператор последовательно устанавливает в кассету ослабляющие фильтры, наблюдая одновременно уменьшение яркостей и контрастов изображений целей. Так продолжается до тех пор, пока яркость изображения одной из целей (наименее яркой, например фона) не достигнет пороговой, т.е. ее изображение перестанет наблюдаться глазом оператора на мониторе визуального отображения (поле яркости наблюдаемого изображения цели достигнет уровня, соответствующего отсутствию полезного сигнала, т.е. достигнет уровня яркости изображения черного участка эталонного отражателя). После этого определяется суммарное значение показателя ослабления установленных ослабляющих фильтров. Затем оператор продолжает последовательно устанавливать ослабляющие фильтры до тех пор, пока яркость изображения другой цели (наиболее яркой, например исследуемого объекта) также не достигнет порогового уровня. При этом вновь определяется суммарное значение показателя ослабления установленных ослабляющих фильтров. Далее по формуле (3) определяется значение контраста исследуемого объекта на окружающем фоне в спектральном диапазоне работы используемого типа измерительного устройства.
Для определения значения коэффициента яркости поверхности исследуемого объекта на определенной длине волны излучения кассета с ослабляющими фильтрами устанавливается перед входным окном объектива приемного канала измерительного устройства, в качестве которого в данном случае используется лазерный дальномер, работающий на определенной длине волны излучения, например на длине волны 1,06 мкм. Наблюдая на мониторе визуального отображения исследуемый объект, оператор наводит на него маркерную метку измерителя дистанции и производит замер дистанции до объекта. Значение дистанции высвечивается на мониторе визуального отображения. После этого оператор последовательно устанавливает в кассету ослабляющие фильтры, производя каждый раз замер дистанции. Эти действия продолжаются до тех пор, пока сигнал в приемном канале измерительного устройства не будет ослаблен до порогового уровня чувствительности фотоприемника, т.е. пока не исчезнут показания дистанции до объекта. После этого определяется суммарное значение показателя ослабления установленных ослабляющих фильтров. Ослабляющие фильтры извлекаются из кассеты. Далее на место исследуемого объекта устанавливается эталонный отражатель, ориентированный перпендикулярно направлению визирования, и оператор, устанавливая поочередно ослабляющие фильтры, производит измерения дистанции до эталонного отражателя, наводя маркерную метку на ту часть эталонного отражателя, которая окрашена белой краской с известным значением коэффициента яркости на рабочей длине волны излучения. После исчезновения показаний дистанции также определяется суммарное значение показателя ослабления установленных ослабляющих фильтров. С использованием выражения (4) производится вычисление значения коэффициента яркости поверхности исследуемого объекта.
В спектральном диапазоне тепловизионных средств при отработке задач защиты корабля при измерениях в экспресс-режиме эталонным излучателем служит излучатель «Серое тело» - патент на полезную модель №65219 МПК G01J 5/02 [25].
Измерение характеристик целей в статике в радиолокационном диапазоне.
В радиолокационном диапазоне технология производства измерений показана и отработана в описании [12] «Способ измерения эффективной поверхности рассеяния объектов в экспресс-режиме в условиях естественного фона радиолокационными средствами и устройство его осуществления».
Необходимость получения достоверных значений ЭПР цели, изделия на разной стадии использования и эксплуатации определяется назначением и способом его применения. В уравнении радиолокации значение величины ЭПР расположено в числителе. Выражается она через отношение плотности потоков мощностей падающей и отраженной волн.
Выражается ЭПР в квадратных метрах или децибелах [25], (с.16). Связь между этими значениями определяется выражением

где (- символ ЭПР, из которого следует, что уровню в ноль децибел соответствует величина ЭПР, равная 1 м2.
Практически в радиотехнических измерениях, как и в оптических измерениях, ЭПР цели σц определяют методом сравнения с известной эффективной отражающей поверхностью эталона:

где σд и σуд - ЭПР цели и эталона;
 - напряженности поля эталона и цели при одинаковых условиях наблюдения.
- напряженности поля эталона и цели при одинаковых условиях наблюдения.
При одинаковых условиях наблюдения, когда измеряют максимальные дальности обнаружения, справедливо отношение:

где Дц.макс и Дэт.макс - максимальные дальности обнаружения цели и эталона.
Измерения и расчеты ЭПР могут производить также путем сравнения величины энергетического уровня сигнала, отраженного от цели, с известным уровнем сигнала от генератора стандартных сигналов (ГСС).
Определяют расчетные значения ЭПР объектов также используя формулы, принятые для классических радиолокационных отражателей типа пластин, сфер цилиндров и других форм, часть из этих отражателей применяется в виде эталонов [31].
В литературе, технических описаниях приводятся характеристики каналов и каскадов РЛС.Так напряжение промежуточной частоты, снимаемое с детектора смесителя, очень мало и составляет 5-50 мкВ. Обосновывается количество каскадов усилителей промежуточной частоты (УПЧ), в том числе и предварительных (ПУПЧ). Также обосновывается количество каскадов, которые охватываются временной автоматической регулировкой усиления (ВАРУ).
Рассмотрены способы измерения интегральной и дифференциальной ЭПР объектов и устройство радиолокационных измерительных комплексов [25 с. 166-175].
Рассматривается возможность проводить измерения затухания отраженных сигналов в РЛ диапазоне с помощью аттенюатора, установленного в «линию визирования», а расчет и измерения производить согласно формуле сравнения (7).
Замещая максимальные дальности обнаружения в формуле (3) значениями аттенюатора после введения затухания сигналов от эталона и цели до порогового уровня, производят логарифмические вычисления.
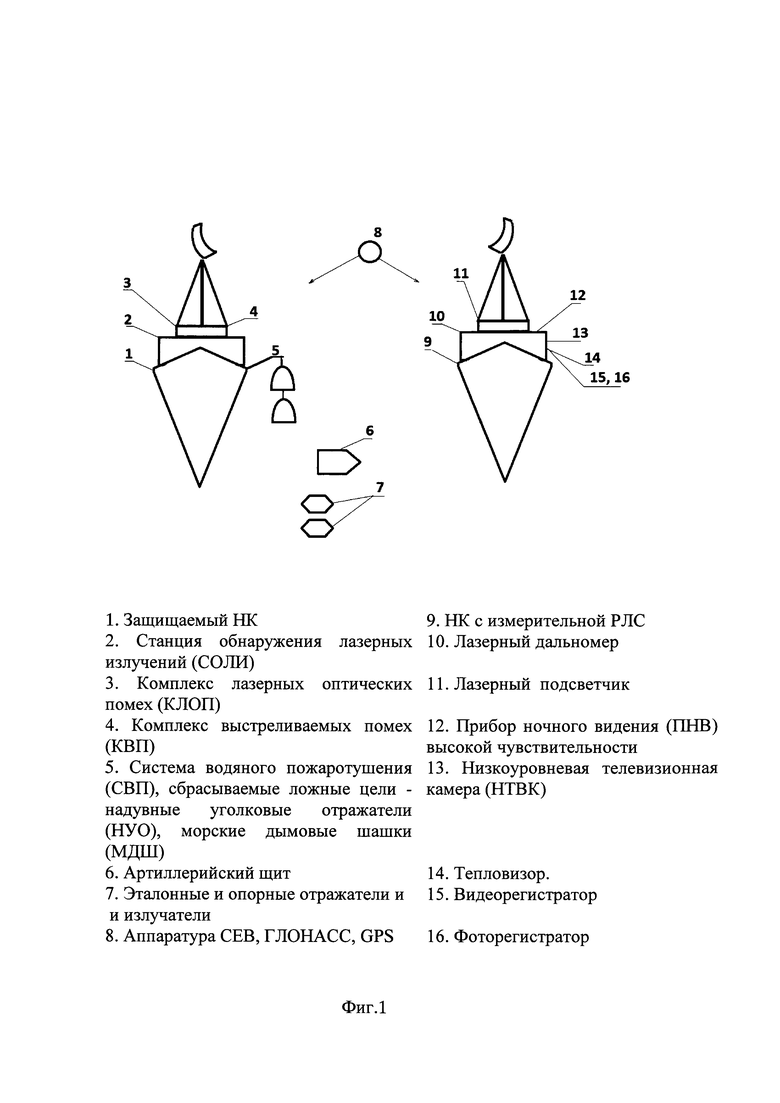
Перевод показаний аттенюатора в размерность ЭПР производят по графику фиг. 2 с модулем 35 мм. График составлен по источнику Л.С.Блок [30].
Субъективные ошибки, которые могут возникнуть при измерениях оператором значений затухания на аттенюаторах, и наблюдении отраженных сигналов на экране индикатора, не велики и составляют от ±0.15 до ±0.05 дБ. Они сводятся к минимуму путем повторного снятия показаний двумя различными наблюдателями для трех последовательных измерений.
Технической задачей настоящей методики является расширение функциональных возможностей штатных РЛС, находящихся в эксплуатации на кораблях и судах, для обеспечения сравнительных, одновременно проводимых экспресс-измерений ЭПР морских, береговых, воздушных и ложных целей при тренировках, в период подготовки мишенной обстановки перед стрельбой и пуском ракет с учетом реальной фоновой обстановки, метеоусловий, брызг, волн.
Методика характеризуется доступностью схемного и конструктивного изменения радиолокационных станций разных типов и диапазонов, а также возможностью привлечения к измерениям штатных операторов радиометристов. Кроме того, использование такого метода измерений организационно и экономически малозатратно, поскольку это исключает привлечение специализированных измерительных лабораторий с операторами и позволяет проводить тренировки радиометристов в походе, на учениях, при подготовке мишенной обстановки.
В данном случае в естественных условиях используют в качестве эталонного отражателя, например, штатный надувной радиолокационный уголковый отражатель, защищенный патентом 2368988 (RU) МПК 7 H01Q 15/18, F41H 3/00 [31]. С целью сокращения затрат, обеспечивающего оборудования и получения второго уменьшенного значения ЭПР этого отражателя на него накидывают металлическую или металлизированную сетку с размером ячейки меньше длины волны, используемой РЛС. Таким образом, радиометрист наблюдает на экране РЛС поочередно два торированных отраженных сигнала, что позволяет отрепетировать методику измерений. Радиометрист уменьшает величину входного сигнала аттенюатором, установленным в цепь прохождения энергии в каскаде ПУПЧ. По пропаданию отраженного сигнала на экране индикатора оператор определяет пороги чувствительности открытого и закрытого сеткой уголкового отражателя. Разница показаний аттенюатора в децибелах дает величину превышения ЭПР открытого и закрытого отражателя. Кроме того, эти значения аттенюатора для данного измерения могут быть приняты за эталонные, что также позволяет убедиться в работоспособности устройства.
Далее оператор проводит такие же измерения со всеми объектами мишенной обстановки на водной поверхности в условиях естественного фона, сравнивания их с эталонными значениями.
Измерение величин ЭПР защищаемых объектов и ложных целей, их сравнительные параметры производят с целью оценки возможности их обнаружения, сопровождения и наведения на них противокорабельного оружия противника, принятия мер снижения заметности. Параметры отражательных способностей объектов и искусственных целей приобретают значения паспортных данных.
Однако, как правило, эти данные получают раздельно, без сравнительных характеристик и получают их в различных условиях окружающей среды.
Полученные разрозненные данные и результаты «привязываются» к характеристикам диапазонов и функциональных возможностей радиолокационных средств.
Рассматривается возможность и целесообразность применения штатных корабельных РЛС для оценки ЭПР надводных кораблей, судов, береговых ориентиров, уголковых отражателей, выстреливаемых ложных целей с учетом реальной фоновой обстановки для обеспечения тренировок радиометристов, проведения учений и стрельб, отработки задач выбора цели с большей или меньшей ЭПР.
Особенностью использования этих РЛС является то, что они имеют тот же диапазон и те же функциональные возможности, что и корабельные средства противника и готовы к использованию с выходом корабля в море. Обслуживаются штатными радиометристами. Эталонные (опорные) отражатели в виде уголковых отражателей могут применяться также штатного исполнения. В сравнительных замерах результаты будут мало отличаться от инструментальных измерений. Это позволит проводить тренировки по специальности, учения и боевые стрельбы. Кроме того, эти РЛС также имеют конечные пороговые уровни чувствительности и линейную характеристику приемного устройства на уровне малых сигналов.
Действия оператора РЛС. Оператор включает РЛС, в заданном секторе обзора находит на экране монитора эталонный отражатель. Ручкой аттенюатора вводит затухание сигнала до пропадания - порога обнаружения, показания регистрируются, затем по команде ЭПР уголка снижается путем накидывания на него металлизированной сетки, также снимаются показания аттенюатора. Разница показаний аттенюатора в дБ соответствует разнице
ЭПР в м2 (5). Этим действием осуществляется проверка работоспособности схемы. Затем производят снижение сигнала от цели до порога обнаружения цели. Из большего показания аттенюатора вычитается меньшее значение.
Этот результат в дБ соответствует разнице ЭПР в м2. ЭПР целей определяется по формуле (7) и по графику фиг. 2.
В динамике (второй этап) устройство работает следующим образом.
После того как измерены параметры существующих постоянно(статических)целей таких как, защищаемый надводный корабль, артиллерийский щит, эталонные отражатели, надувные уголковые отражатели, приступают к измерению физических полей второго этапа, когда на параметры статических целей (защищаемого корабля) накладываются поля выстреливаемых средств.
Оператор измерительного комплекса поочередно включает лазерный дальномер, лазерный подсветчик и определяет отражательные характеристики объектов мишенной обстановки.
Затем оператор измерительного комплекса включает лазерный дальномер. Лазерный обнаружитель СОЛИ определяет излучение как «сигнал». Оператор измерительного комплекса включает лазерный подсветчик, СОЛИ определяет излучение как «угроза», сигналы поступают на индикаторное устройство, на запоминающее устройство со съемом параметров и на запуск динамично развивающихся, сбрасываемых и запускаемых в действие по оперативным командам устройств с автоматическим фиксированием временных параметров каждого комплекса, изделия, устройства, а именно комплекс лазерных оптических помех поз. 3 Фиг. 1, комплекс выстреливаемых помех поз. 4 Фиг. 1, система водяного пожаротушения (СВП) поз. 5, Фиг. 1, а также надувные уголковые отражатели (НУО) и морские дымовые шашки (МДШ).Таким образом производят замеры всех физических полей объектов мишенной позиции радиолокационного и оптического диапазонов.
Визуализация измерений в лазерном диапазоне достигается введением в состав измерительных средств лазерного дальномера поз. 10 и лазерного подсветчика поз. 11. Включается комплекс лазерных оптических помех защищаемого корабля поз. 3, а наблюдают эффективную работу оптических помех с помощью ПНВ высокой чувствительности и низкоуровневой телевизионной камеры НТВК чувствительных в спектральном диапазоне до 1-2 мкм. Работа оператора проходит следующим образом. Оператор измерительного комплекса наводит лазерный подсветчик на борт защищаемого корабля, наблюдает подсвечиваемое пятно в окуляр ПНВ или НТВК, вводит в линию визирования приборов светофильтры до достижения порогового уровня. Фиксирует значение коэффициента пропускания. Затем такую же операцию проводит с пятном от подсветчика на эталонном отражателе (5). Фиксирует значение коэффициента пропускания и по формуле (3) определяет коэффициент яркости борта защищаемого корабля. Оператор комплекса лазерных помех защищаемого корабля наводит излучатель на артиллерийский щит. Оператор измерительного комплекса наблюдает подсвеченное пятно на щите прибором ночного видения ПНВ или НТВК, вводит в линию визирования светофильтры до достижения порогового уровня. Фиксирует значение коэффициента пропускания светофильтров и по формуле (3) определяет коэффициент яркости реальной и ложной лазерной цели.
Кроме того, в экспресс-режиме минуя инструментальную проверку яркостных характеристик лазерных целей оператор приборов 12 и 13 измерительного комплекса Фиг. 1 определяет по этой же методике сравнительные по принципу «больше-меньше» яркостные данные пятна лазерного подсветчика от сухого и смоченного СВП борта и надстройки защищаемого корабля и созданной излучателем КЛОП поз. 3 Фиг. 1. изделием МДМ-2Э [18] «удаленной от защищаемого объекта ложной лазерной цели» и докладывает руководителю испытаний.
Кроме того работа оператора сводится к своевременной фиксации включения средств, перехода из режима в режим, контроля передачи данных на измерительный комплекс для последующего анализа. Контролируют также передачу данных телеметрическими каналами.
Таким образом, двухэтапное измерение физических полей целей позволяет в статическом режиме проверить работоспособность измерительных средств, провести замеры оптических и радиолокационных характеристик целей, провести тренировку операторов. На втором этапе замеряют характеристики динамично развивающихся целей - оптических, создаваемых комплексом оптических помех КЛОП, снарядами КВП, аэрозолями МДШ, изменение оптических характеристик при применении водяных завес СВП и радиолокационных целей, создаваемых снарядами КВП, изменение отражательных характеристик защищаемого НК.
В экспресс-режиме минуя инструментальную проверку по принципу «больше - меньше» радиолокационной станцией с встроенным аттенюатором проверяют ЭПР корабль - щит, щит - снаряд помех, корабль - несколько снарядов. Также в оптическом диапазоне (лазерном, телевизионном, тепловизионном проверяют яркостные отметки
Итогом экспресс-анализа мишенной позиции служит вывод - успевают ли средства РЭБ и другие контура защиты корабля выйти на режим с заданной эффективностью работы по отражению ПКР с комбинированными ГСН и ракет с гиперзвуковыми скоростями.
Устройства для осуществления способа.
За прототип устройства принята многосенсорная станция «Еврофлирт-410», разработанная французской фирмой «Сафран» [37]. Станция предназначена для выполнения боевых задач днем и ночью, в любых погодных условиях при ведении разведки, наблюдения и наведения оружия на цели. Приборы созданы по последним технологиям: ТВ-камера диапазона 0.4-0.7 мкм, ближневолновая ИК-камера диапазона 0.7-0.95 мкм с активным устройством подсвета для поиска и опознавания целей на большой дальности при плохой видимости, детектор коротковолновой ИК-области спектра (0.95-1.7 мкм) для формирования изображения в условиях плохой видимости и обнаружения лазерных пятен подсветки целей на поле боя; камера средневолновой области спектра (3-5 мкм); четыре лазерных модуля подсветки целей, целеуказания, измерения дальности с дальностью действия до 20 км. Стандартные интерфейсы обеспечивают связь с бортовыми и наземными станциями управления.
Состав устройств для формирования мишенной и фоно-целевой обстановки приведен на фиг. 1.
В крупном плане мишенная позиция фиг. 1 состоит из защищаемого НК со штатным вооружением, артиллерийских щитов, эталонных и опорных отражателей и измерительного комплекса с аппаратурой радиолокационного и оптического диапазонов. Аппаратура СЕВ, ГЛОНАСС, ОРБ является общей составляющей.
Измерительный стенд состоит из радиолокационной и оптической частей, приборы которых находятся на защищаемом и на измерительном НК.
В состав радиолокационной части входят: Измерительная РЛС на основе штатной радиолокационной станции, расположенная на надводном объекте или на берегу поз. 9 рис. 1 [12], защищаемый НК поз. 1 фиг. 1 со штатным вооружением - КВП с радиолокационными и оптическими снарядами поз. 4 [20, 35, 36], НУО поз. 5 фиг. 1 [31], эталонные и опорные отражатели фиг. 1 поз. 7 и артиллерийские щиты поз. 6 фиг. 1.
В состав оптической части входят: измерительная аппаратура -лазерный дальномер фиг. 1 поз. 10, лазерный подсветчик поз. 11, прибор ночного видения (ПНВ) высокой чувствительности поз. 12 [14], низкоуровневая телевизионная камера (НТВК) поз. 13 [15, 16], тепловизор поз. 14, видеорегистратор поз. 15, фоторегистратор поз. 16. На защищаемом НК фиг. расположены: станция обнаружения лазерных излучений (СОЛИ) поз. 2 [34], комплекс оптических лазерных помех (КЛОП) поз. 3 [19, 32, 33], КВП с оптическими и радиолокационными снарядами помех поз. 4 [20, 36], система водяного пожаротушения (СВП) поз. 5 [21], морские дымовые шашки (МДШ) поз. 5, артиллерийские щиты поз. 6, эталонные и опорные отражатели поз. 7 [26]. Объекты и измерительные средства объединены аппаратурой СЕВ, ГЛОНАСС, GPS поз. 8 [17, 18].Малодоступные органы контроля снабжены телеметрическими датчиками. Поля зрения измерительных средств могут быть направлены на одну цель или на несколько целей. В поле зрения прибора должны попадать исследуемый объект, фон и эталон.
Важным вопросом обеспечения работы по формированию мишенной позиции является сбор информации о готовности средств, времена перехода с одного режима на другой, время эффективного действия. Так время эффективного действия, например, снарядов радиолокационных и оптических помех определяют операторы по отработанным правилам. Так же определяют характеристики лазерных помех. Ожидаемые значения ЭПР и яркостные характеристики лазерных ложных целей операторы определяют на первом этапе испытаний, поскольку они должны быть привязаны к характеристикам защищаемого корабля. Операторы результаты замеров передают на пункт сбора информации. Эти операции трудоемки и малопроизводительные.
Хронометрический контроль операций таких как выстрел помехового снаряда, сброс надувного уголкового отражателя - НУО, наддув давления до определенного значения и ряд других действий в том числе подключение других контуров защиты НК для качественной и количественной оценки мишенной позиции, исключения человеческого фактора используют телеметрические датчики.
Порядок работы операторов. Целью настоящего изобретения является сведение в последовательную цепь действий операторов приборов измерительного комплекса, а также операторов мишенной позиции при формировании информационного ресурса мишенной и фоно - целевой обстановки полигона при отработке задач защиты надводного корабля от ПКР с комбинированными ГСН с учетом дальности обнаружения и подлетного времени ПКР, своевременной классификации ГСН, физических и скоростных параметров цели. Сущность изобретения как технического решения заключается в применении существующих средств измерения и контроля, и разрабатываемых средств визуализации измерений для определения временных параметров развертывания защищаемых средств, анализа и выработки команд на включение в работу имитируемых лазерных средств противника от измерительного комплекса до защищаемого корабля с СОЛИ, далее время анализа и выработки решения, далее время включения выстреливаемых, сбрасываемых, излучающих средств или перевода их из дежурного режима в рабочий и производства измерения физических полей объектов на первом (стационарном) этапе и фиксации изменения этих полей на втором (динамичном) этапе, когда накладываются поля снарядов помех КВП, МДШ, СВП, НУО.
Оператор оптического измерительного прибора, устанавливая светофильтры определенного спектрального диапазона перед объективом, добивается порога обнаружения цели, эталона, фона и по формуле (3) получает результат измерения.
Оператор измерительной РЛС в заданном секторе находит эталонный отражатель, ручкой аттенюатора вводит затухание сигнала до порога обнаружения, фиксирует показания аттенюатора, переводит эталонный отражатель на меньшую величину ЭПР путем накидывания на него металлизированной сетки[12], также снимает показания. Разница показаний аттенюатора в дБ по графику фиг. 2 соответствует разнице ЭПР в квадратных метрах.
Кроме рассмотренного варианта инструментальной проверки характеристик целей в сравнении с эталонами и опорными отражателями при формировании мишенной позиции может быть использован вариант характеристик целей «больше - меньше» для обеспечения превышения уровня сигналов от ложных целей над сигналами от защищаемого объекта. Например, отражение сигнала лазерного подсветчика от борта корабля и сигнал подсвета ложной лазерной цели комплексом лазерных оптических помех в относительных единицах, ЭПР корабля и ЭПР снарядов радиолокационных помех в квадратных метрах, ЭПР корабля и ЭПР артиллерийского щита.
На основании анализа на месте проведения испытаний могут быть приняты оперативные меры по формированию информационного ресурса мишенной и фоно-целевой обстановки, выработаны предложения по периодичности постановки помех при групповом и массированном налете ПКР.
Предложенные приемы могут быть применены для тестирования других контуров защиты корабля. Контроль принятых мер может быть осуществлен дистанционно.
Источники информации
1. Ашенмиль Н.С.и др. Воссоздание комплексного морского научно-исследовательского испытательного полигона ВМФ на Балтийском море. Морская радиоэлектроника №4 (22) 2007, с. 30-34.
2. Э.В. Ананьин. Научно- технический сборник НИЦ РЭВ и ФИР ВМФ, выпуск 3(183), 2012 г. Полигон электродинамического моделирования.
3. В.Н. Гульбин и др. Радиозащитные строительные материалы. Наукоемкие технологии, №3, т.15, 2014 г.
4. Д.Н. Владимиров и др. Инновационные наноматериалы для эффективной маскировки и снижения радиолокационной заметности военной техники. Военная мысль. №11, 2016 г.
5. Радиоэлектронная борьба в Вооруженных Силах Российской Федерации. Тематический сборник. 2018, с 152-155.
6. В.В. Бычков, Н.В.Жуков. Сложная мишенная позиция для выполнения стрельбы противокорабельными ракетами. Морской сборник. 2018 г. №6 с. 37-45.
7. С.Б. Калитин. Военная академия Республики Беларусь (г.Минск). Технологии полигонных исследований и испытаний радиоэлектронных средств. Наукоемкие технологии, №5, т.15, 2014 г.
8. Патент на изобретение РФ №2592475 2006 г. H04j 3/06 Формирователь опорных сигналов частоты и времени.
9. Патент на изобретение РФ №2582993 2016 г. Н04В 7/26 Мобильная многоканальная радиоприемная аппаратная.
10. Патент на изобретение РФ №2627242 2017 г. G06F 19/00; G06F 17/10. Способ комплексного мониторинга и управления состоянием многопараметрического объекта.
11. Патент на изобретение РФ №2378625 С2 2008 г. G01j 1/10. Способ измерения яркостных характеристик объектов в оптическом диапазоне спектра и устройство для его осуществления.
12. Патент на изобретение РФ №2616596 2017 г. G01S 13/02; G01R 29/08. Способ измерения эффективной поверхности рассеяния объектов в экспресс- режиме в условиях естественного фона радиолокационными средствами и устройство для его осуществления.
13.Э.В. Ананьин. Формирование радиолокационной мишени для имитации надводного корабля. Морская радиоэлектроника. Корабли и вооружение как единая система. №2(12) июнь 2005 г. с.32-35.
14. В.Г. Волков. Цифровые приборы визуализации изображения. Оборонный комплекс- научно-техническому прогрессу России. 2012 г. №1. с. 19-25.
15. В.Г. Волков. Низкоуровневые телевизионные системы. Оборонный комплекс - научно-техническому прогрессу России. 2002 г. №2 с. 40-43.
16. В.И. Федосеев. Современные матричные фотоприемники для приема слабых сигналов в приборах астроориентации космических аппаратов. Оптический журнал. Том 84, №12, 2017 г. с. 11-17.
17. В.Г. Волков. Применение спутниковых систем навигации в приборах визуализации изображений. Специальная техника. 2014. №3. с. 60 - 65.
18. Государственная служба времени, частоты и определения параметров вращения земли. ВНИИФТРИ Москва - 2013. с. 65-67; 191-199.
19. А.А. Петраков, О.А. Короткий. История АО «Тайфун»: от приборостроительного завода к научно-производственному предприятию. Вопросы радиоэлектроники. 2017. №11. с. 108. УДК 338.
20. А.Г. Покровский. Вооружение кораблей средствами выстреливаемых помех. Морской сборник. 2007. №5. с. 15-17.
21. Система водяного пожаротушения. Морской энциклопедический словарь. Том 3. С.Петербург.«Судостроение». 1994 г.
22. Кочемасов В., Белов Л. Аттенюаторы с электронным управление -производители и характеристики. «Электроника: Наука. Технология. Бизнес.» 2017. №4 с. 82-85; №3; №6.
23. «Телевидение». Под редакцией Шмакова П.В., «Связь», 1970, стр. 32.
24. ГОСТ 7601-73, «Физическая оптика. Термины, буквенные обозначения и определения основных величин». М., Госстандарт СССР, 1978, стр. 15.
25. Алепко М.И., Гвоздев Н.П., «Физическая оптика», М., «Машиностроение», 1979, стр 182-189.
26. Излучатель «Серое тело». Патент на полезную модель №65219 МПК G01J 5/02 (2006.01).
27. Мищенко Ю.А. Радиолокационные цели. М. Военное издательство. 1966, с. 19.
28. Кобак В.О. Радиолокационные отражатели. М. Советское радио. 1975, с. 26.
29. Майзельс В.Н. Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей. М. Советское радио. 1972, с. 29, 36.
30. Блох Л.С.«Практическая номография». М. Высшая школа. 1971, с. 22.
31. Патент 2368988 (RU). Надувной радиолокационный отражатель. МПК 7 H01Q 15/18, F41H 3/00.
32. «Устройство противодействия оптико-электронным системам наведения». Патент на полезную модель №76187 МПК H04K 3/00 (2006.01).
33. «Устройство противодействия оптико-электронным системам наведения». Патент на полезную модель №130470 МПК H04K 3/00 (2006.01).
34. «Устройство обнаружения лазерных излучений». Патент на полезную модель №133325 МТК G01S 3/78 (2006.01).
35. Авторское свидетельство №145668 (1980.07) Технология снаряжения.
36. Авторское свидетельство №158913 (1981.05) КВП ПК-10
37. Многосенсорная станция «Еврофлир-10». Зарубежное военное обозрение №11. 2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| Способ измерения эффективной поверхности рассеяния объектов в экспресс-режиме в условиях естественного фона радиолокационными средствами и устройство для его осуществления | 2015 |
|
RU2616596C2 |
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| СПОСОБ РАДИООПТИЧЕСКОЙ МАСКИРОВКИ НАДВОДНОГО КОРАБЛЯ | 2017 |
|
RU2660518C1 |
| Способ оценки электромагнитной совместимости объектовых оптико-электронных средств и выработки рекомендаций по её обеспечению | 2022 |
|
RU2801973C1 |
| Комплекс маскировки объекта | 2023 |
|
RU2829573C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ЦЕЛИ ДЛЯ ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ТАКТИЧЕСКИХ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИКО-ЭЛЕКТРОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2021 |
|
RU2776005C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЯРКОСТНЫХ ХАРАКТЕРИСТИК ОБЪЕКТОВ В ОПТИЧЕСКОМ ДИАПАЗОНЕ СПЕКТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378625C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
Изобретение относится к области военной техники и касается способа формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными головками самонаведения. Способ включает в себя оценку параметров защищаемого корабля, мишенной и фоно-целевой обстановки в оптическом и радиолокационном диапазонах. При включении на измерительном комплексе лазерного дальномера или лазерного подсветчика станцией обнаружения защищаемого корабля фиксируется излучение и вырабатывается команда на перевод средств противодействия в рабочий режим с фиксацией всех команд и откликов исполнительных устройств и механизмов. На измерительном комплексе определяют работные времена средств противодействия, визуализируют время подготовки выстрела, время пуска, время формирования, время эффективного действия, замеряют физические поля создаваемых ложных целей и определяют их влияние на изменение физических полей защищаемого корабля. Технический результат заключается в обеспечении возможности определения характеристик исследуемых средств защиты с точными временными параметрами их развития и времени эффективного действия. 2 ил.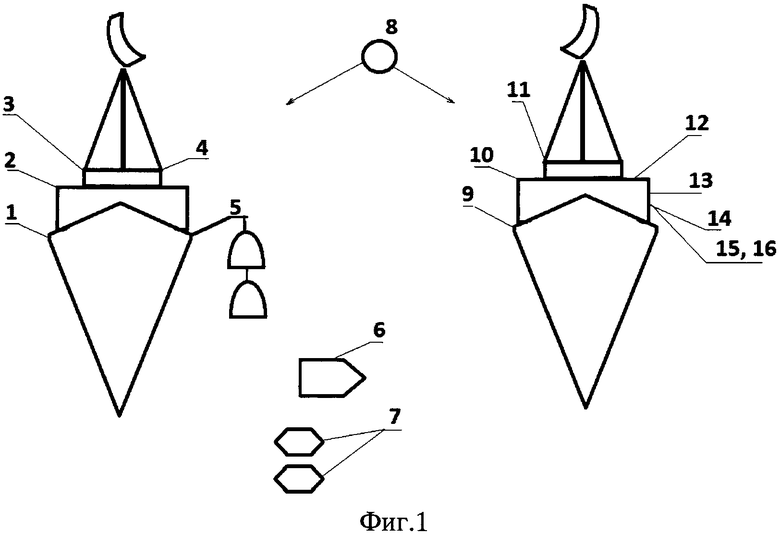
Способ формирования мишенной позиции в экспресс-режиме при ограниченном времени подлета противокорабельных ракет с комбинированными ГСН, включающий комплекс известных устройств для его осуществления и визуализации, заключающийся в сравнительной оценке параметров защищаемого корабля, мишенной и фоно-целевой обстановки относительно параметров контрольных объектов и эталонов в оптическом диапазоне путем уменьшения сигнала ослабляющими светофильтрами до порогового уровня, определения контраста как отношение показателей ослабления светофильтров и в радиолокационном диапазоне путем уменьшения сигнала аттенюатором, встроенным в каскады схем усиления промежуточной частоты, не подвергнутые временной регулировке усиления и отградуированные в логарифмическом масштабе с переводом дБ в эффективную площадь рассеяния, до порогового уровня, причем все объекты мишенной и фоно-целевой обстановки, включая ложные сбрасываемые, выстреливаемые цели и автономные помеховые устройства могут находиться в поле обзора и мгновенном поле зрения средств измерительного комплекса на фоне морской поверхности или горизонта, результаты измерений физических полей объектов, а также отметки службы единого времени (СЕВ), сигналы позиционирования навигационной службы ГЛОНАСС, GPS фиксируют на электронную (флэш) память с последующей возможностью анализировать и визуализировать результаты работы, отличающийся тем, что при включении на измерительном комплексе в плановую работу лазерного дальномера или лазерного подсветчика станцией обнаружения лазерных излучений защищаемого корабля фиксируется излучение и классифицируется как «сигнал» в первом случае или « цель в угрожаемом секторе» во втором, в случае выявления «угрозы» вырабатывается (выдается) команда на перевод запланированных средств противодействия защищаемого корабля из повседневного или дежурного режима в рабочий с фиксацией данных ГЛОНАСС, GPS и СЕВ, всех команд и откликов исполнительных устройств и механизмов, включенных в план работы, передачей данных по линиям связи и телеметрии на пункт управления, на измерительном комплексе определяют работные времена средств с учетом подлета ракет с гиперзвуковой скоростью, используют комплекс известных устройств, приборов для визуализации (время подготовки выстрела, время пуска, время формирования, время эффективного действия) и замеряют физические поля создаваемых кратковременно действующих ложных целей и определяют их влияние на изменение физических полей защищаемого корабля в диапазоне работы комбинированных ГСН, вырабатывают предложения как по периодичности постановки возобновляемых ложных целей при отражении предполагаемого группового или массированного налета ракет, так и по корректировке мишенной позиции, фоно-целевой обстановки для обеспечения превышения уровня сигналов от ложных целей над сигналами от защищаемого объекта, выработке требований к средствам РЭБ и другим контурам защиты корабля.
| Бычков В.В., Жуков Н.В | |||
| "Сложная мишенная позиция для выполнения стрельбы противокорабельными ракетами", МОРСКОЙ СБОРНИК, т | |||
| Ватерклозет | 1925 |
|
SU2055A1 |
| Пишущая машина | 1922 |
|
SU37A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЯРКОСТНЫХ ХАРАКТЕРИСТИК ОБЪЕКТОВ В ОПТИЧЕСКОМ ДИАПАЗОНЕ СПЕКТРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378625C2 |
| Способ измерения эффективной поверхности рассеяния объектов в экспресс-режиме в условиях естественного фона радиолокационными средствами и устройство для его осуществления | 2015 |
|
RU2616596C2 |
| US 9212872 B2, 15.12.2015. | |||

