Комплекс противовоздушноракетнокосмической обороны (ПВРКО) относится к оборонительным системам, более конкретно к зенитным ракетным комплексам (ЗРК).
Основная цель предлагаемого комплекса - увеличить зону и вероятность поражения воздушных, ракетных и некоторых космических целей по сравнению с применяемыми и разрабатываемыми в настоящее время ЗРК.
Аналогами предлагаемого комплекса являются ЗРК С-300П, С-300В, С-300ПМУ1 (2), "Антей-2500", "Хок", "Пэтриот" (Василин Н.Я., Гуринович А.Л. Зенитные ракетные комплексы. Минск, ООО "Попурри", 2002.), система ПРО А-135 (газета "Красная звезда", N 108 от 21.07.2002), система ПРО Джи-ПАЛЗ, ЗРК "Тхаад" (Космическая политика и космические силы США. Москва, Дипломатическая академия МИД РФ, 2002).
Предлагаемый комплекс и большинство вышеназванных аналогов содержат следующие общие части: радиолокаторы обзора пространства и наведения ракет, пусковые установки, ракеты-перехватчики, пункт боевого управления, электростанцию и др.
Комплекс ПВРКО должен поражать следующие классы целей:
1. Воздушные (аэродинамические) цели: самолеты с высотою полета до 30 км на дальности до 800 км, в том числе самолеты типа "Стелс" (невидимые в некотором диапазоне частот), постановщики активных помех, беспилотные летательные аппараты (БПЛА) с высотой полета от 300 м, планирующие авиабомбы типа "Уоллал", вертолеты с высотой полета от 100 м, стратегические и тактические крылатые ракеты с высотой полета от 100 м.
2. Ракетные (баллистические) цели: одиночные боеголовки со скоростью до 5 км/с, сложные баллистические цели (СБЦ) (в состав цели входят до 30 боеголовок, до 20 ложных целей, большое количество дипольных отражателей-помех), глобальные планирующие головные части с индивидуальным наведением, оперативно-тактические ракеты типа "Першинг", "Ланс", "Скад", "Срэм" со скоростью до 3 км/с.
3. Космические цели: спутники на геостационарной и высокоэллиптических орбитах (видимые комплексом или по данным системы предупреждения о ракетном нападении СПРН или системы контроля космического пространства СККП), многоразовые транспортные космические корабли типа "Шаттл", система "Бриллиант Айз" (система обнаружения и сопровождения баллистических ракет (БР) и головных частей (ГЧ) с высотой орбиты до 1800 км при количестве космических аппаратов (КА) - 50, система "Бриллиант Пебблз" (система малых ракет-перехватчиков) с высотой орбиты до 400 км при количестве КА до 1000.
Предлагаемый комплекс может привлекаться для поражения наземных и надводных целей по целеуказанию.
Приведенный перечень типов целей требует для эффективного поражения различные типы ракет-перехватчиков.
Комплекс должен поражать вышеуказанные цели при любых погодных условиях, в том числе в дождь, туман, при снегопаде, на встречных курсах, на курсах с параметром до 100 м и при стрельбе вдогон.
Комплекс должен быть помехозащищен: работать в условиях активных и пассивных помех.
Возможность поражения вышеуказанных целей, увеличение зоны и вероятности поражения их в предлагаемом комплексе достигается применением ракеты-перехватчика с новым ракетным двигателем (заявка 2002110167 "Скоростной ядерный ракетный двигатель" с приоритетом от 18.04.2002 г.), с новой боевой частью (заявка 2001119261 "Взрывное устройство высокой производительности" с приоритетом от 12.07.2001 г.) и усовершенствованной головки самонаведения двухканального типа (инфракрасный и радиолокационный канал).
Приведем принцип действия и характеристики указанных принципиальных отличий комплекса. Ракетный двигатель РД использует коническую мишень, из отверстия в вершине конуса которой вылетает по оси ракеты или под углом к ней с высокой скоростью сгусток плотной плазмы, образованный в результате термоядерного синтеза небольшой массы ядерного вещества мишени под действием лазерного излучения. При этом внутриядерная энергия ядерного вещества (легкие изотопы водорода или гелия) преобразуется в кинетическую энергию сгустка плотной плазмы, вылетающего из мишени с высокой скоростью и создающего тягу двигателя. При этом скорость и отклонение ракеты может изменяться регулировкой периода вылета сгустков. Отклонение ракеты в двух плоскостях достигается вылетом сгустков под углом к оси ракеты. При поочередном отклонении возможно создать вращение ракеты вокруг оси, что стабилизирует положение ракеты в пространстве. Предусмотрено увеличение начальной (разгонной) скорости ракеты и уменьшение конечной (перед поражением) скорости. Способ наведения ракеты на начальном и среднем участке траектории - инерциально-командный, на конечном участке - с помощью головки самонаведения.
Скорость вылетающего из конуса сгустка плазмы 105 м/с. Среднее значение ускорения ракеты за период вылета сгустков - 130 м/с. Конечная скорость и досягаемость ракеты по дальности зависят от запаса ядерного вещества (количества конических мишеней). В одном из типов ракет указанный запас обеспечивает полет ракеты на высоту геостационарной орбиты (36000 км).
Двигатель может сопрягаться с остальной частью различных классов ракет. Конструкция двигателя приведена в заявке 2002110167. Таким образом, за счет новых возможностей двигателя зона поражения целей значительно увеличивается. При этом она ограничивается не досягаемостью ракеты, а дальностью обнаружения радиолокатора обзора и наведения.
Боевая часть БЧ ракеты представляет собой взрывное устройство высокой производительности. БЧ состоит из взрывателя, заряда, преобразующего слоя у предохранительно-исполнительного устройства.
Взрыватель боевой части ракеты-перехватчика выполнен в виде четырех конических мишеней, каждая из которых имеет твердые гладкие боковые стенки из металла (твердотельные мишени), заполняется заключенным в коническую полимерную оболочку взрывчатым веществом в виде смеси дейтерия с тритием или гелия - 3 и имеет в вершине конуса отверстие для вылета сгустка плазмы. Оси каждой пары конусов располагаются в пространстве взаимно перпендикулярно, а отверстия вершин конусов примыкают к общему пространству между конусами.
Благодаря указанной конструкции во взрывателе осуществляется двухэтапное сжатие взрывчатого вещества. На первом этапе сжатия происходят следующие процессы: при падении импульса лазерного излучения на основание конуса имеет место адсорбция взрывчатого вещества, оно испаряется, и возникает реактивная сила, создающая ударные волны, которые, отражаясь oт стенок конуса, двигаются к его вершине и схлопываются в ней. При этом взрывчатое вещество в вершине сжимается до такой степени, что возникает термоядерный режим "лазерной искры", образуется в вершине первичный сгусток плазмы, который под действием реактивной силы в большой скоростью вылетает наружу через отверстие в вершине конуса.
На втором этапе сжатия происходят следующие процессы: четыре вылетевших сгустка плазмы сталкиваются в пространстве между вершинами конусов, при этом сильно увеличивается степень сжатия плазмы, и температура образующегося вторичного сгустка плазмы увеличивается до термоядерной (107 К), возникает "режим зажигания" плазмы, в заряде образуется тепловая волна (волна термоядерной реакции), которая распространяется в заряде. Конструктивные размеры взрывателя: диаметр основания конуса - 6 мм, высота конуса - 7 мм, диаметр отверстия в вершине - 2 мм, расстояние между отверстиями противоположных конусов - 4 мм.
Взрыватель БЧ использует четыре попарно взаимно перпендикулярные конические мишени, из отверстий в вершинах конусов которых вылетают сгустки сжатой плазмы под действием лазерного излучения и охлопываются в пространстве между конусами. Таким образом, осуществляется двухэтапное сжатие ядерного вещества.
В результате двухэтапного сжатия температура в месте схлопывания сгустка поднимается до термоядерной (107 К) и в виде тепловой волны распространяется в заряде. Заряд представляет собой шаровой сектор ядерного вещества. Вылетевшие в результате термоядерной реакции нейтроны или протоны могут использоваться двояким образом в зависимости от высоты полета поражаемой цели:
- На высотах более 30-40 км (где атмосферные газы практически отсутствуют) нейтроны или протоны заряда вылетают непосредственно в окружающее пространство (в угле раскрыва ядерного вещества заряда) и механически разрушают цель. При этом нейтроны через 3-5 с распадаются на частицы и не достигают Земли, а протоны, падая, нейтрализуются ионизационным слоем атмосферы.
- На высотах менее 30-40 км (где сосредоточено 90% массы атмосферы) нейтроны и протоны в заряде БЧ направляются на ее преобразующий слой, представляющий собой волокнистый композит, и вызывают трещины в материале слоя. Возникновение, развитие и разрушение трещины сопровождается акустической эмиссией. Импульсы этой эмиссии, сливаясь, образуют ударную волну, которая разрушает цель. Таким образом, обеспечивается экологически чистое воздействие БЧ на окружающую среду. Конструкция БЧ приведена в заявке 2001119261.
Тротиловый эквивалент БЧ может изменяться в зависимости от массы заряда и давления газа в нем от нескольких килограмм до нескольких мегатонн. При эквиваленте БЧ в 150 кт ее масса составляет 3 кг. Отсюда производительность БЧ равна 150·106/3=50·106. В 1961 году на Новоземельском полигоне была взорвана водородная бомба эквивалентом в 50 Мт и массой 24 т ("Секретные исследования". Аналитическая газета N1, Минск, 2002). Отсюда производительность водородной бомбы 50·106/24=2,08·106. Таким образом, производительность предлагаемой БЧ в 50·106/2,08·106 ~ 25 раз больше водородной бомбы. Иначе, при одинаковом эквиваленте, масса предлагаемой БЧ в 25 раз меньше массы водородной бомбы. Это соотношение позволяет при одинаковой массонагрузке сосредоточить на ракете более мощную БЧ. Кроме того, в связи с малой массой и габаритами БЧ, может применяться ее кассетная конструкция в виде большого числа снарядов. Эта БЧ при разлете снарядов способна поражать протяженные цели (СБЦ, Бриллиант Айз, Бриллиант Пебблз и др.). При этом отдельные снаряды разводятся в пространстве с помощью специального механизма выбрасывания, а подрыв вылетевшего снаряда осуществляется с помощью установленного на нем радиовзрывателя. Указанный радиовзрыватель представляет собой миниатюрный радиолокатор, формирующий сигнал подрыва, например, по уровню отраженного сигнала. Более сложным является радиовзрыватель, вырабатывающий сигнал подрыва при определенном положении цели в радиолуче антенны взрывателя. Может быть применен доплеровский радиовзрыватель, в котором в режиме непрерывного излучения выделяются колебания частоты Доплера, и при определенной амплитуде колебаний этой частоты выдается сигнал подрыва.
Следует подчеркнуть, что только кассетная конструкция БЧ с большими эквивалентами снарядов и большим числом их способна на сегодняшний день поразить СБЦ. При этом не требуется производить селекцию боевых и ложных головных частей и помех различного рода, так как при поражении предлагаемой БЧ разрушаются все части СБЦ.
Радиус поражения ядерной БЧ зависит от ее эквивалента, угла раствора заряда БЧ, а в случае кассетной БЧ - также от числа снарядов в кассете, и выбирается таким, который обеспечивает компенсацию ошибок наведения ракеты и значительно повышает вероятность поражения цели.
Предлагаемый комплекс в отличие от аналогов предназначен также для поражения некоторых космических целей. При этом космические цели, видимые радиолокатором обзора и наведения РЛОН, поражаются аналогично воздушным и ракетным целям. Для поражения космических целей, невидимых РЛОН, а именно, спутников на геостационарной и высокоэллиптических орбитах, а также на орбитах с высотой более 1500 км используется целеуказание от систем СПРН и СККП в виде шести или пяти элементов орбиты. По указанным данным на пункте боевого управления рассчитывается упрежденная точка прицеливания (точка встречи ракеты с целью). Наведение ракеты в точку прицеливания осуществляется с помощью специального радиолокатора наведения для высоколетящих целей РВЦ по методу наведения ракеты по радиолучу. Первоначальный (после старта) захват ракетой радиолуча производится в результате поиска РВЦ в секторе старта. Радиолуч РВЦ модулируется таким образом, чтобы при отклонении ракеты от направления радиолуча ее приемное устройство ориентирования определяло сигнал рассогласования и вырабатывало соответствующие команды управления ракетой, поступающие на ракетный двигатель через микропроцессорную систему МПС. При этом ракета удерживается в центре поперечного сечения радиолуча. Указанное наведение по радиолучу подобно наведению противолокационной ракеты типа "Шрайк". Наведение по радиолучу реализовано в ЗРК "Адатс" (Канада) на втором этапе наведения.
Движение радиолуча РВЦ в точку прицеливания осуществляется по полетному заданию для данного типа цели. Это задание хранится в МПС РВЦ и корректируется для конкретных данных точки старта ракеты и ее встречи с целью.
При захвате радиолуча стартовавшей ракетой радиолуч и ракета движутся совместно. По истечении нескольких минут (точно указывается в полетном задании) на конечном участке траектории ракеты по команде с РВЦ включается радиолокационный канал головки самонаведения ГСН. Дальность действия этого канала до 500 км. Канал способен захватить цель размером от 1 до 10 м. Выполнение полетного задания по времени контролируется МПС РВЦ, имеющей в своем составе таймер, позволяющий определять время с момента старта ракеты. При захвате цели ГСН управление движением ракеты передается ГСН. При этом наведение ракеты осуществляется по методу пропорционального сближения. Если в течение наибольшего полетного времени, указанного в полетном задании, вблизи расчетной точки встречи ракеты с целью, ГСН не захватила цель, то производится поиск ее путем движения радиолуча по спирали вокруг расчетной точки встречи.
При поражении высотных космических целей применяется кассетная БЧ, в которой снаряды снабжены радиовзрывателем. При приближении ракеты к цели примерно на расстояние 200 м, которое определяет радиолокационный канал ГСН, происходит выбрасывание снарядов из кассеты в пространство, взведение радиовзрывателя и по команде с него при расстоянии примерно 50 м до цели подрыв снаряда. При этом цель поражается потоком нейтронов или протонов. Принцип действия и устройство радиовзрывателя были приведены выше. В случае промаха снаряд самоликвидируется.
Следует подчеркнуть, что только новая ядерная ракета в сочетании с наведением ее по радиолучу РВЦ и применением радиолокационной ГСН способна обеспечить поражение высотных космических целей, невидимых РЛОН.
Следует отметить, что целеуказание от СПРН и СККП для поражения космических целей может не потребоваться, если применить для обнаружения и сопровождения высоколетящих целей лидар, поднятый на самолете типа "Авакс" на высоту порядка 10-12 км и баражирующего так в течение 2-3 ч. При этом атмосфера выше лидара не будет влиять на распространение лазерного излучения лидара, поглощение излучения в космосе незначительно, и обеспечиваются большие дальности обнаружения (до 40 тыс. км).
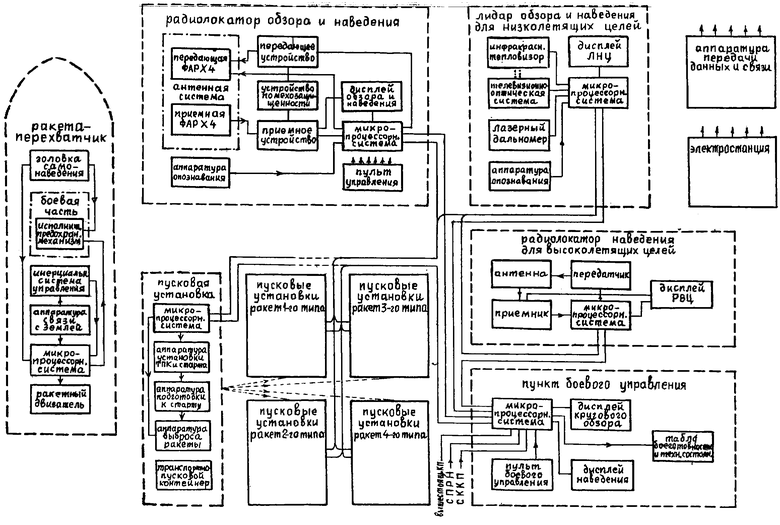
Техническая сущность предлагаемого комплекса поясняется чертежом, в котором представлена структурная схема комплекса с указанием состава и связей его частей.
Комплекс ПВРКО состоит из следующих основных частей:
1. Пункт боевого управления ПБУ.
2. Радиолокатор обзора и наведения РЛОН.
3. Лидар обзора и наведения для низколетящих целей ЛНЦ.
4. Радиолокатор наведения для высоколетящих целей РВЦ.
5. Пусковые установки ПУ.
6. Ракеты-перехватчики РП.
7. Аппаратура передачи данных и связи АПДС.
8. Электростанция ЭС.
В состав комплекса также входят другие средства технической эксплуатации комплекса, указанные ниже.
Пункт боевого управления ПБУ предназначен для:
а) обобщения и оценки воздушноракетнокосмической обстановки в зоне действия комплекса. Это действие ПБУ производится по данным, поступающим от различных источников: РЛОН, ЛНЦ, РВЦ, системы СПРН и СККП, вышестоящего КП;
б) назначения целей для поражения, целераспределения с учетом приоритета целей (на основе оценки степени угрозы) и назначения типа ракеты для поражения цели;
в) выдачи целеуказания по результатам целераспределения на РЛОН, ЛНЦ, РВЦ и команд на подготовку ПУ;
г) обмена информацией с РЛОН, ЛНЦ, РВЦ, ПУ и вышестоящим КП.
ПБУ включает следующие части (см. чертеж): микропроцессорная система, пульт боевого управления, дисплей кругового обзора, дисплей наведения (с результатами целераспределения), табло боеготовности и технического состояния частей комплекса, аппаратура передачи данных и связи. На дисплее кругового обзора информация отображается в виде формуляров, включающих номер цели, дальность, скорость, направление полета, результаты опознавания.
Радиолокатор обзора и наведения РЛОН является многофункциональной РЛС, предназначенной для:
а) обнаружения и сопровождения целей в зоне видимости, захвата целей по данным целеуказания, в том числе завязки трасс (траекторий), определения типа целей (по траекторным данным), определения государственной принадлежности воздушных целей (с помощью приданной аппаратуры опознавания);
б) наведения ракет-перехватчиков путем передачи команд на их борт (команд управления скоростью и отклонения ракеты), включения ГСН, подрыва БЧ (в случае необходимости при неисправной ГСН), приема донесений с борта ракеты;
в) управления стартом назначенных ракет, управления захватом целей ЛНЦ и РВЦ, передаваемых на их сопровождение;
г) обмена информацией с ПБУ, ПУ, ЛНЦ, РВЦ.
Радиолуч РЛОН производит строчное сканирование. При очередном проходе луча через угловое направление, на котором находится цель или ракета, происходит обнаружение ее, и при следующих проходах - взятие на сопровождение. В те моменты, когда луч оказывается направленным на ракету, передаются по радиолинии связи команды управления ракетой.
РЛОН представляет собой трехкоординатную когерентно-импульсную РЛС сантиметрового диапазона волн с высоким энергетическим потенциалом. РЛОН включает следующие части (см. чертеж): антенная система типа ФАР, передающее устройство, приемное устройство, устройство помехозащищенности, микропроцессорная система, дисплей обзора и наведения, пульт управления, аппаратура передачи данных и связи.
Антенная система размещена в четырех взаимноперпендикулярных плоскостях. Каждая плоскость (полотно) содержит передающую ФАР и приемную ФАР. Радиолуч передающей ФАР управляется электронным путем от микропроцессорной системы. Угол раствора радиолуча 1,5°*1,5°. Уровень боковых лепестков очень низкий. Уровень наклона плоскости ФАР к горизонту может меняться на небольшой угол (около 3°). При транспортировке РЛОН полотна ФАР складываются. Отклонение от горизонта оснований антенн РЛОН, как и пусковых установок, учитывается автоматически микропроцессорной системой путем внесения поправки в угол места на указанное отклонение. Этот учет особенно важен, когда комплекс работает на пересеченной местности и зимой. Угол обзора каждой передающей ФАР по азимуту +45° - -45°, по углу места 1-75°. Диаметр передающей ФАР - 2-2,5 м, приемной ФАР - 0,8-1 м.
Передающее устройство содержит мощный генератор сантиметрового диапазона волн, работающий на одной из 120 фиксированных высоких частот. Генератор производит мгновенную (за 1 с) перестройку указанной частоты при появлении организованных противником активных помех и при захвате радиолучом РЛОН противолокационной ракеты. РЛОН снабжен:
а) устройством предупреждения о наличии в радиолуче противолокационной ракеты и автоматического перехода на другую высокую частоту;
б) устройством помехозащищенности, которое фиксирует наличие активных и пассивных помех, определяет координаты постановщиков активных помех, оценивает помеховую обстановку и назначает рабочую частоту генератора, свободную от подавления противником.
Устройства а) и б) имеют в своем составе местный микропроцессор.
Приемное устройство имеет высокую чувствительность (до 10-13 Вт) и реализует цифровой способ селекции движущихся цепей (СДЦ), цифровые способы оптимальной (адаптивной) обработки принятых сигналов. Указанные цифровые способы, а также автоматические регулировки приемника и автоматический съем координат осуществляются с помощью местного микропроцессора. Цифровая обработка принятого сигнала и автоматический съем координат повышает точность определения координат и устойчивость сопровождения целей. Благодаря применению микропроцессоров, приемное устройство обладает высокой пропускной способностью по целям. Цифровая СДЦ с программным изменением частоты зондирующих импульсов обеспечивает отсеивание организованных противником пассивных помех, отражений от местных предметов и подстилающей поверхности земли при малых углах места радиолуча.
Микропроцессорная система (МПС) РЛОН осуществляет управление работой частей РЛОН, в том числе и местных микропроцессоров, обменом информацией с ПБУ, ПУ, ЛНЦ, РВЦ и выдачей данных на дисплей.
Микропроцессорная система МПС РЛОН, как и других частей комплекса, включает микропроцессор и память на больших интегральных схемах. При этом МПС осуществляет обработку больших объемов данных в реальном масштабе времени с интенсивным обменом данными с внешними устройствами. МПС реализуется на основе так называемой базовой архитектуры ДСП. Современные МПС выполняют до 2 миллиардов операций в секунду и имеют тактовую частоту до 500 МГц. Современные МПС могут содержать таймеры и выполнять сложные логические операции с привязкой ко времени.
Аппаратура опознавания воздушных целей ("свой-чужой") является типовой для государства, имеет самостоятельную антенну, укрепленную наверху ФАР, и вводит данные опознавания в МПС РЛОН. Время опознания - 3 с. При сопровождении своего самолета или вертолета обеспечивается блокировка запуска по нему ракеты.
Приведем технические характеристики РЛОН. Дальность обнаружения РЛОН по целям с ЭПР головной части БР (0,5-1 м2) составляет 2500 км. Эта дальность приведена в технических характеристиках ЗРК "Антей-2500", разработанного на базе ЗРК С-300В (стр.276 книги: Василин, Гуринович, Зенитные ракетные комплексы, 2002). Увеличение дальности обнаружения целей ограничивается в настоящее время не мощностью передающего устройства РЛС, а в значительной степени массой РЛС, допустимой для ее транспортировки на колесном или гусеничном ходу. Среднеквадратичная ошибка определения дальности - 100 м, азимута и угла места – 15’, скорости - ± 10 м/с. Разрешающая способность по дальности - 200 м, по азимуту и углу места – 30’. Время обнаружения цели с ЭПР 0,5 м2 - 5-7 с. Темп обзора в секторе одной ФАР 90° может изменяться от 0,1 до 5 с. Предусмотрено замедленное вращение радиолуча в секторах баллистических целей (при этом сектор в 30° просматривается за 0,3 с). Переход от обнаружения цели на ее сопровождение происходит за 5-10 с. Выдача координат цели на ПБУ и команд управления на борт ракеты производится с частотой 1 Гц. Количество одновременно обнаруживаемых РЛОН целей - до 500, одновременно сопровождаемых целей - до 300.
В рассмотренной РЛОН совмещены функции обнаружения и наведения в одном локаторе. Такое совмещение стало возможным благодаря современным усовершенствованиям техники ФАР и повышению быстродействия и памяти МПС. Указанное совмещение имеет место в системе А-135 (РЛС "Дон-2Н"), ЗРК "Пэтриот" (РЛС AN/MPQ-53), ЗРК "Вуросэм" (РЛС "Арабел") и др.
Лидар обзора и наведения для низколетящих целей ЛНЦ предназначен для:
а) обнаружения и сопровождения низколетящих целей (крылатых ракет, вертолетов, баллистических целей, необстрелянных на средних высотах и др.), захвата целей по данным целеуказания, определения государственной принадлежности целей;
б) наведения ракет путем выдачи команд управления на борт ракеты, приема донесений с борта ракеты о выполнении команд;
в) управления стартом назначенных ракет;
г) обмена информацией с ПБУ, ПУ, РЛОН.
В состав ЛНЦ входят (рис. 1) инфракрасный тепловизор (ИТ), телевизионно-оптическая система (ТОС), лазерный дальномер (ЛД), микропроцессорная система (МПС) ЛНЦ и дисплей ЛНЦ. Тепловизор включает следующие части: антенная система (телескоп) типа Кассегрена, импульсный твердотельный лазер инфракрасного диапазона, оптический матричный приемник активного и пассивного канала, микропроцессорная система, дисплей обзора и наведения и аппаратура передачи данных и связи. Антенны ЛНЦ устанавливаются на электрически управляемом гиростабилизированном основании (платформе).
Тепловизор может работать в режиме секторного или кругового обзора, а также в пассивном режиме как инфракрасный обнаружитель (ИО), и в активном режиме как инфракрасный локатор (ИЛ). Тепловизор может работать как днем, так и ночью. Так как луч ИЛ очень тонкий, то он может быть наклонен на угол места в 0,5° при отсутствии влияния подстилающей поверхности земли, и обнаруживать цели на высоте от 100 м на дальности 11,5 км. Кроме того, в приемнике тепловизора предусмотрена селекция отражений от подстилающей поверхности земли и местных предметов. Обзор луча тепловизора по азимуту и углу места производится электромеханическим вращением элементов телескопа.
Приведем технические характеристики тепловизора. Максимум излучения, принимаемого ИО, лежит в диапазоне волн 3-5 мкм. Рабочая длина волны ИЛ - в диапазоне 8-12 мкм, более точно - 10-10,5 мкм (окно прозрачности атмосферы). Угловое расхождение луча по азимуту и углу места - 1°, энергия в импульсе ИЛ - 1,2-1,5 Дж, длительность импульса - 20-50 нс, частота повторения импульсов - 100 кГц. Дальность обнаружения целей зависит от наличия охлаждения фотоприемника. При наличии охлаждения дальность ИО (пассивный режим) составляет 15 км, ИЛ (активный режим) -100 км. Дальность в 100 км приведена в технических характеристиках инфракрасного обнаружителя доработанного в Германии ЗРК "Хок".
Тепловизор совместно с лазерным дальномером позволяет обнаруживать и различать летящие и зависающие вертолеты в соответствии с алгоритмом, предусмотренным в МПС ЛНЦ.
Так как ракета-перехватчик может развивать большую скорость при начальном движении (до 12 км/с), то она может перехватить низколетящие цели, имеющие скорости до 4 км/с на высотах 10-15 км, в том числе фрагменты СБЦ, прорвавшиеся при стрельбе с РЛОН на средних высотах. На высотах 10-15 км (в атмосфере) баллистические цели сильно нагреваются, что способствует более эффективному поражению их с помощью ЛНЦ. Таким образом, в комплексе для ракетных целей создается два эшелона поражения: на средних и низких высотах.
В лидаре предусмотрена миниатюрная телевизионно-оптическая система видеонаблюдения ТОС высокого разрешения (с 10-кратным увеличением) с пассивным инфракрасньм каналом. ТОС содержит передающую камеру (ПК), видеоконтрольное устройство (ВКУ), коаксиальную кабельную линию и др. ПК разработана на основе полупроводниковых приборов с зарядовой связью и осуществляет цифровые методы обработки сигнала с использованием микропроцессора. С целью совместного наблюдения ПК может поворачиваться приводом антенной системы тепловизора. ВКУ представляет собой монитор, размещенный в кабине ЛНЦ. Дальность обнаружения ТОС самолета - до 15 км, а дальность распознавания цели - до 7 км.
ТОС позволяет обнаруживать и распознавать цели скрытно без излучения электромагнитной энергии. ТОС может быть применена в условиях интенсивных помех тепловизору. ТОС может работать днем и ночью как совместно с тепловизором, так и автономно. При одновременной работе ТОС и тепловизор контролируют работу друг друга.
ЛНЦ в составе тепловизора, телевизионно-оптической системы и лазерного дальномера может привлекаться для обнаружения и поражения самолетов типа "Стелс", если эти самолеты не были обнаружены в радиодиапазоне РЛОН.
Радиолокатор наведения для высоколетящих целей РВЦ предназначен для наведения ракет на спутники с высотой орбиты более 1500 км, в том числе на геостационарных и эллиптических орбитах, а также для выдачи и приема рассмотренной информации ПБУ. Принцип наведения ракеты по радиолучу был приведен выше.
РВЦ представляет собой когерентно-импульсную РЛС диапазона 10-20 МГц (диапазон космических систем связи и ретрансляции данных), который обеспечивает прохождение радиоволн через атмосферу без существенного поглощения. Радиолуч РВЦ наводится из заданного направления старта ракеты в направление точки прицеливания (поражения цели). РВЦ включает (см. чертеж) параболическую антенну с перемещением радиолуча в двух плоскостях, передатчик, приемник, микропроцессорную систему, дисплей и аппаратуру передачи данных и связи. МПС РВЦ имеет в своем составе таймер, позволяющий отсчитывать время от момента старта ракеты до моментов, требуемых при выполнении полетного задания для данного типа цели. Так как в РВЦ применяется метровый диапазон волн, который почти не поглощается в космосе, то дальность распространения сигналов РВЦ составляет 50-60 тыс. км.
Пусковые установки ПУ предназначены для хранения, транспортировки и запуска ракет-перехватчиков, а также для выдачи и приема информации ПБУ, РЛОН, ЛНЦ, РВЦ. Ракеты-перехватчики (РП) установлены в транспортно-пусковых контейнерах (ТПК).
ПУ включает (см. чертеж) аппаратуру установки ТПК в стартовое положение, аппаратуру подготовки к старту, в том числе запуска гироскопа, аппаратуру выброса ракеты из ТПК (обычно с помощью небольшого порохового заряда - пиропатрона), микропроцессорную систему, аппаратуру передачи данных и связи. ПУ являются устройствами многоразового использования с вертикальным стартом ракеты, который позволяет обстреливать цели, летящие с любого направления. Так как масса и габариты РП значительно меньше, чем у ракет современных ЗРК, то количество ПУ доведено до 27 - по 6-10 РП в каждой ПУ. Боевой комплект комплекса - 202 РП. Вылет РП из ТПК производится с помощью механического выбрасывателя по командам с РЛОН, ЛНЦ, РВЦ. После старта РП ПУ может быть вновь заряжена с помощью пуско-заряжающей установки. Время заряжания - 10 мин. Так как применяется четыре типа ракет, то информация о старте их передается на ПБЧ и по принадлежности на РЛОН, ЛНЦ или РВЦ.
Работное время комплекса (время между моментом обнаружения и пуском ракеты) составляет 2-3 с.
Ракеты-перехватчики РП предназначены для поражения целей, типы которых были указаны выше. В зависимости от типа цели и высоты ее полета предусмотрены четыре типа РП (назначение и состав этих типов указаны ниже). РП включает следующие основные части (см. чертеж): ракетный двигатель, боевая часть, головка самонаведения, инерциальная система управления, аппаратура связи с землей (РЛОН, ЛНЦ или РВЦ), микропроцессорная система, электропитание.
РП представляет собой одноступенчатую ракету с ядерным ракетным двигателем, ядерной боевой частью и специальной ГСН.
Ядерный ракетный двигатель РД содержит ядерные мишени основного направления ракеты и отклонения от него, лазерное устройство, механизм передвижения ленты с ядерными мишенями, синхронизатор и др. Принцип действия ядерного ракетного двигателя был приведен выше. Антенны линии связи ракеты с землей крепятся на корпусе в хвостовой части ракеты. Тяга двигателя, скорость, ускорение, отклонение и вращение ракеты могут изменяться в некоторых пределах регулировкой частоты вылета сгустков плазмы.
Начальная скорость ракеты - 105 м/с. Среднее ускорение - 130 м/с2. Ракета может совершать маневры с перегрузкой до 40 g. Дальность полета ракеты зависит от запаса (количества) ядерных мишеней. В комплексе предусмотрены четыре вида запаса, обеспечивающие полет ракеты на дальность 50, 500, 2000 и 40000 км.
Габариты двигателя: диаметр - 30 см, для дальности 2000 км - длина 50 см, масса - 50 кг. Длина двигателя зависит от расчетной наибольшей дальности полета ракеты. Указанные технические характеристики обоснованы в заявке 2002110167.
Регулировка тяги и скорости РД производится микропроцессорной системой по командам с РЛОН, ЛНЦ, РВЦ или ГСН. При этом на участке разгона ракеты скорость увеличивается, а на конечном участке - понижается до величины 10 км/с. Управление двигателем обеспечивает поражение цели на встречных курсах, на параметре и при стрельбе вдогон.
Ядерная боевая часть БЧ включает взрыватель, заряд, преобразующий слой (преобразователь), предохранительно-исполнительный механизм и др. Принцип действия ядерной БЧ был приведен выше. В качестве ядерного вещества БЧ может применяться газообразная смесь дейтерия с тритием или при освоении соответствующей технологии получения - газообразный гелий - 3.
Поражение целей предлагаемой БЧ производится на высотах полета их до 500 км - ударной волной, образуемой БЧ, на высотах более 500 км - потоком нейтронов (при применении смеси дейтерия с тритием) или потоком протонов (при применении гелия - 3). При поражении целей указанными потоками преобразователь в БЧ (слой волокнистого композита) не применяется. Угол воздействия ударной волны или вылета нейтронов (протонов) определяется, в основном, углом раствора заряда и может меняться при изготовлении от 30 до 150°. В предлагаемом комплексе этот угол для упрощения расчетов выбран постоянным и равным 90°. Хотя эквивалент БЧ зависит от массы заряда и давления газа в нем, но, так как в заряде применяются легкие элементы, то масса БЧ зависит от эквивалента незначительно. Масса БЧ с эквивалентом до 1 Мт примерно равна 3 кг.
Предохранительно-исполнительный механизм (ПИМ) обеспечивает безопасность обслуживающего боевого расчета в обращении с ракетой на земле и при ее полете до момента приближения к цели и управляет подрывом БЧ при подлете ракеты на расстояние поражения БЧ. При этом в ПИМ различают два режима действия: режим взведения (снимается запрет на подрыв БЧ) и режим исполнения (производится подрыв БЧ). ПИМ размещается в ракетах 1 и 2 типа (см. ниже) непосредственно в ракете, в ракетах 3 и 4 типа - в каждом снаряде кассетной БЧ. В ракетах 1 и 2 типа ПИМ приводится в действие в части взведения по сигналу с ГСН (при захвате ею цели) или при отсутствии захвата ГСН по сигналам с РЛОН, ЛНЦ (при подлете к цели), в части исполнения - по сигналам тех же средств - при приближении ракеты на расстояние поражения БЧ. При этом расстоянии ПИМ подает импульс подрыва на синхронизатор БЧ, который производит подрыв заряда БЧ. При промахе ракеты, определяемом ГСН, или по сигналам с РЛОН, ЛНЦ а) для ракет 1 типа ПИМ снимает режим взведения, и БЧ не может быть подорван при падении ракеты на землю, и тем самым ракета не наносит ущерба своим войскам, б) для ракет 2 типа ПИМ производит подрыв БЧ, и тем самым осуществляется самоликвидация ракеты. Действие ПИМ для ракет 3 и 4 типа рассмотрено ниже.
Приведем технические характеристики БЧ. Эквивалент: 150 кт. Угол поражения: 90°. Габариты БЧ: диаметр - 7,5 см, длина при эквиваленте 150 кт - 10 см. Указанные характеристики обоснованы в заявке 2001119261.
Для поражения протяженных целей (СБЦ, Бриллиант Айз, Бриллиант Пебблз), а также целей, имеющих высокие скорости движения (более 7 км/с), применяется кассетная конструкция БЧ. Количество снарядов в кассете при диаметре ракеты 30 см - до 14, при диаметре ракеты 60 см - до 54. Разлет снарядов перед поражением цели производится механизмом выбрасывания, который содержит пороховой заряд (пиропатрон), подрываемый по сигналу с ГСН. После вылета на каждом снаряде срабатывает ПИМ: в части взведения - при выбросе из ракеты, в части исполнения - по сигналу с радиовзрывателя. При минимальном расстоянии до цели, которое определяет радиовзрыватель, ПИМ подает импульс на синхронизатор БЧ, который и производит подрыв заряда БЧ снаряда. При промахе снаряда, определяемом радиовзрывателем, ПИМ производит подрыв снаряда, и тем самым осуществляется самоликвидация снаряда.
Головка самонаведения ракеты ГСН предназначена для обнаружения цели по излученному или отраженному сигналу, для наведения ракеты на цель на конечном участке траектории и для подрыва БЧ. Захват ГСН цели может производиться в режиме автоматического поиска цели по угловым координатам и дальности цели и по командам, передаваемым на борт ракеты с пункта наведения (РЛОН, ЛНЦ, РВЦ).
К ГСН предъявляются требования увеличения поля зрения, минимизации времени захвата цели, минимизации конечного промаха ракеты, нанесения максимального ущерба цели, уменьшения габаритов и массы.
В настоящее время головными разработчиками ГСН являются Московский НИИ "Агат" и Петербургское АО "ЛОМО". НИИ "Агат" разработал двухканальные ГСН с использованием микропроцессора и волокнисто-оптического гироскопа, заменившего механический гироскоп и др. Вопросы разработки алгоритмов усовершенствованной ГСН изложены в кандидатской диссертации О.Е.Хуртина. Формирование и исследование алгоритма цифровой системы наведения на основе волокнисто-оптических гироскопов. Московский физико-технический институт (ТУ), Долгопрудный, 2001. Благодаря применению волокно-оптического гироскопа и микропроцессора, разрабатываемые ГСН в значительной степени удовлетворяют вышеуказанным требованиям.
В ракетах-прехватчиках применяются два типа ГСН:
а) инфракрасная (тепловая) в пассивном и активном режимах;
б) инфракрасная (тепловая) в пассивном режиме и радиолокационная - в диапазоне 10-20 ГГц, моноимпульсная, с пеленгацией равносигнальной зоной.
В типе б) инфракрасная часть включается за 3-4 с до подлета ракеты к точке встречи с целью. Противнику трудно создать эффективные помехи такой ГСН.
Подрыв БЧ ГСН осуществляется через ПИМ примерно в 50 м от цели (неконтактный взрыватель). Наиболее простым способом определения этой дальности является уровень отраженного от цели сигнала. Так как ГСН импульсная, то дальность может определяться по времени приема отраженного импульса. Наиболее совершенны ГСН, использующие для подрыва эффект Доплера. Они позволяют выбрать положение ракеты относительно цели для наиболее эффективного поражения цели.
Одним из перспективных направлений развития ГСН является возможность определения ее инфракрасной и радиолокационной частью с помощью микропроцессора сигнатуры (облика) цели по спектральным и траекторным признакам, что значительно повысит помехозащищенность комплекса. Эта сигнатура через аппаратуру связи с ракетой может быть передана на РЛОН или ЛНЦ для учета при последующем наведении.
Инфракрасные и ультрафиолетовые части ГСН с помощью микропроцессора могут выделить (отождествить) цель на фоне ИК-ловушек, отстреливаемых с самолета, вертолета или головной части БР.
По указанным направлениям совершенствования ГСН большие работы проведены в АО "ЛОМО". ГСН "ЛОМО", как утверждает АО, способна различать истинные и ложные цели в условиях постановки противником искусственных помех в инфракрасном диапазоне.
Приведем технические характеристики ГСН. Угол приема (излучения) равен 24°*24°, период обзора 0,5-0,7с. При глубоком охлаждении фотоприемника чувствительность ГСН повышается на два порядка. При этом захват цели ГСН происходит на удалении от цели в инфракрасном пассивном канале - 8 км, в инфракрасном активном канале - 20 км, в радиолокационном канале - 35 км. В ракете дальнего перехвата дальность захвата целей радиолокационным каналом увеличена до 500 км, так как в диапазоне волн этого канала поглощение энергии в космосе практически незначительно. Масса ГСН с обтекателем порядка 15 кг, диаметр 150 мм, длина 400 мм. ГСН размещается в обтекателе.
Приведем характеристики других частей ракеты-перехватчика. Инерциальная система управления ИСУ содержит гироскоп, заменивший автопилот, причем целесообразно применить гироскоп волоконно-оптического типа, имеющий ряд преимуществ по сравнению с механическим гироскопом. С помощью гироскопа стабилизируется угловое движение ракеты относительно ее центра масс и определяется угловая скорость линии визирования ракеты. Имея данные гироскопа, ИСУ в зависимости от поступающих команд наведения управляет положением центра масс ракеты в пространстве, для чего вырабатывает параметр рассогласования и по нему команды управления ракетным двигателем по скорости и по отклонению. Эти команды реализуются через МПС ракеты. Таким образом, наведение ракеты на цель (управление ракетным двигателем) производится через МПС двумя способами: на начальном и среднем участке траектории - инерциально-командное управление, на конечном участке-управление от ГСН.
Как было показано выше, ПИМ выполняет роль неконтактного взрывателя БЧ. Кроме того, в ракетах 1 и 2 типа имеется контактный взрыватель магнитно-электрического типа, который срабатывает при ударе ракеты о твердый предмет. Этот взрыватель воздействует на ПИМ в режиме взведения. Однако, в ракете 1 типа этот взрыватель не срабатывает при падении ракеты на землю, не нанося при этом ущерба своим войскам.
Аппаратура связи ракеты с землей (РЛОН, ЛНЦ или РВЦ) обеспечивает передачу команд наведения на ракету и донесении о выполнении этих команд с ракеты. Указанная линия связи работает на несущей частоте РЛОН, ЛНЦ или РВЦ в зависимости от типа ракеты и имеет высокую пропускную способность и помехозащищенность, применяя криптографию, осуществляемую с помощью МПС. Приемник этой аппаратуры выдает команды управления на ИСУ ракеты. Антенны аппаратуры крепятся на корпусе в хвостовой части ракеты.
Учитывая вышеуказанные характеристики РД, БЧ и ГСН приведем рекомендуемые для комплекса типы ракет:
1. Ракета ближнего перехвата. Применяется для высот целей до 30 км. Имеет БЧ с одним зарядом и преобразователем (поражает цель ударной волной). Имеет инфракрасную ГСН с пассивным и активным каналом. Имеет неконтактный и контактный взрыватель. Дальность полета ракеты до 30 км. Связь с ракетой осуществляется на частоте ЛНЦ.
2. Ракета нижнего среднего перехвата. Применяется для высот целей 20-500 км. Имеет БЧ с одним зарядом и преобразователем (поражает цель ударной волной). Имеет ГСН с инфракрасным пассивным каналом и радиолокационным каналом. Имеет неконтактный и контактный взрыватель. Дальность полета ракеты до 500 км. Связь с ракетой осуществляется на частоте РЛОН.
3. Ракета верхнего среднего перехвата. Применяется для высот целей 200-2000 км. Имеет БЧ кассетного типа без преобразователя (поражает цели потоком частиц). Диаметр ракеты - 60 см. Количество снарядов в ракете - 50. Имеет ГСН с инфракрасным пассивным каналом и радиолокационным каналом. Имеет только неконтактный взрыватель (радиовзрыватель). Дальность полета ракеты до 2000 км. Связь с ракетой осуществляется на частоте РЛОН.
4. Ракета дальнего перехвата. Применяется для высот целей 1500-40000 км. Имеет БЧ кассетного типа (поражает цели потоком частиц). Количество снарядов в кассете - 12. Имеет ГСН с инфракрасным пассивным каналом и радиолокационным каналом большой дальности. Имеет только неконтактный взрыватель (радиовзрыватель). Дальность полета ракеты до 40000 км. Имеет приемное устройство ориентирования по радиолучу. Связь с ракетой осуществляется на частоте РВЦ, причем принимаемые сигналы модулированы для наведения по радиолучу.
Пусковые установки распределены по типам ракет следующим образом: 1 тип -5 ПУ по 10 ракет в каждой, 2 тип - 10 ПУ по 8 ракет в каждой, 3 тип - 10 ПУ по 6 ракет в каждой, 4 тип - 2 ПУ по 6 ракет в каждой.
Количество одновременно обстреливаемых комплексом целей - до 100.
Назначение типа ракет для обстрела производится автоматически при целераспределении на ПБУ. Однако оператор ПБУ может принудительно назначить другую одну или две ракеты для стрельбы по данной цели.
Аппаратура передачи данных и связи АПДС обеспечивает обмен телекодовой и речевой информацией между частями комплекса. АПДС применяет волоконно-оптические линии связи (ВОЛС) или линии радиотелекодовой связи (РТКС). ВОЛС имеют повышенную прочность и защищены от воздействия радиоактивных излучений. РТКС имеют криптографическую защиту и применяются при больших удалениях частей комплекса. РТКС позволяет резко сократить время развертывания/свертывания комплекса.
Электростанция ЭС обеспечивает электроэнергией все части комплекса. В ЭС может быть применен дизель с электрогенератором или газотурбинный агрегат с электрогенератором. Для учебных целей в мирное время питание комплекса может быть осуществлено от промышленной электросети. Местные источники электропитания РД, БЧ, ГСН и др. представляют собой малогабаритные кадмий-литиевые или литиево-сульфидные элементы.
Во всех радиоэлектронных частях комплекса предусматривается встроенный функциональный контроль, осуществляемый с помощью МПС этих частей. Функциональный контроль позволяет своевременно выявлять неисправности аппаратуры и устранять их. В комплексе должна быть предусмотрена возможность тренировок боевого расчета, имитирующая ведение боевых действий, исключая реальные пуски ракет.
В состав комплекса входит аппаратура навигации, использующая сигналы космических радионавигационных систем, аппаратура топопривязки и взаимного ориентирования частей комплекса. В состав комплекса также входит аппаратура контроля и защиты от средств массового поражения.
Аппаратура комплекса размещается в многоосных колесных автомобильных фургонах. Всего в комплексе 13 фургонов: ПБУ, РЛОН, ЛНЦ, РВЦ, пять фургонов ПУ и запасных РП, один фургон обработки данных документирования и три фургона административно-технического назначения (ремонта, хранения ЗИП, кабельного хозяйства и др.). Должен быть проработан вопрос возможностей размещения частей комплекса на гусеничном шасси высокой проходимости и вопрос авиатранспортабельности комплекса.
Время перевода комплекса из походного положения в боевое (боеготовность комплекса к обстрелу целей) - 1-5 мин. Для пересеченной местности время развертывания/свертывания увеличивается и должно быть определено при эксплуатации.
Комплекс должен удовлетворять следующему требованию по надежности: среднее время наработки на отказ - 1000 часов.
Рассмотрим работу комплекса в динамике для двух операций боевых действий, характеризуемых двумя типами целей: сложная баллистическая цель и спутник на геостационарной орбите. При этом СБЦ поражается комплексом автономно (без команды с вышестоящего КП), а спутник на геостационарной орбите - по команде с вышестоящего КП.
В режиме "Боеготовность N1" РЛОН и ЛНЦ производят круговой обзор окружающего пространства. При обнаружении РЛОН цели определяются при каждом обзоре ее координаты. МПС РЛОН завязывает траекторию цели (отождествляет отдельные точки с одной целью), определяет по траекторным данным скорость и ориентировочно тип цели. В рассматриваемой ситуации по протяженности и составу цели, скорости изменения ее координат МПС относит цель к СБЦ. Данные о траектории цели и типе цели отражаются на дисплее обзора РЛОН и непрерывно выдаются на ПБУ. МПС ПБУ производит пролонгацию цели, оценивает ее опасность (по точке падения), решает задачу целераспределения (определяет упрежденную точку (прицеливания) и тип используемой ракеты - 3-й тип). Указанные решения отражаются на дисплее кругового обзора и наведения. Оператор ПБУ принимает решение об обстреле цели и вводит в МПС команду назначения цели на обстрел. По этой команде ПБУ выдает на РЛОН координаты точки прицеливания и на ПУ с ракетой 3-го типа команду о подготовке к старту. При вхождении цели в зону поражения РЛОН решает предварительную задачу наведения и выдает на ПУ команду на старт назначенной ракеты. После получения с ПУ сигнала о старте ракеты и определения ее координат МПС РЛОН решает основную задачу наведения по методу пропорционального сближения. При этом за координаты цели принимается некоторая средняя точка ее. По результатам решения задачи наведения вырабатывается сигнал, пропорциональный отклонению ракеты от линии визирования. Указанный сигнал преобразуется в команды наведения ракеты. Эти команды по радиолинии связи передаются на борт ракеты на инерциальную систему управления ИСУ. ИСУ, сравнивая текущее положение ракеты и поступившие команды наведения, вырабатывает параметр рассогласования и на основе его команды управления ракетным двигателем по скорости, отклонению и вращению ракеты. Эти команды реализуются МПС. Таким образом, РЛОН автоматически ведет ракету по линии визирования в течение всего времени ее полета. При этом ракета склоняется в направлении точки прицеливания, а траектория ее полета формируется таким образом, чтобы сближение ракеты с целью позволило ГСН осуществить захват цели. Так осуществляется инерциально-командное управление ракетой.
При приближении ракеты к цели на дальность действия ГСН РЛОН выдает сигнал о включении сначала радиолокационной части ГСН, а затем и инфракрасной в пассивном режиме. При захвате ГСН цели управление ракетным двигателем передается на ГСН. При этом на РЛОН передается сигнал о захвате ГСН цели. Если такого сигнала не последует, то РЛОН продолжает наводить ракету.
При приближении ракеты на дальность действия БЧ ГСН или РЛОН выдают через МПС команду вылета снарядов на механизм выбрасывания их из кассеты. Снаряды разлетаются, и через 1-2 с приводится в действие предохранительно-исполнительный механизм ПИМ каждого снаряда. При этом ПИМ устанавливает режим взведения (снимается запрет на подрыв снаряда), и включается радиовзрыватель. При приближении снаряда на расстояние поражения БЧ, которое определяется радиовзрывателем, последний подает сигнал на подрыв БЧ. При этом подается импульс напряжения на синхронизатор БЧ снаряда, который приводит в действие лазер. Лазер инициирует подрыв снаряда БЧ. При подрыве снаряда вылетает в определенном угле поток нейтронов или протонов, которые механически разрушают элементы СБЦ в объеме разлета снарядов. Факт поражения цели устанавливается РЛОН по резкому изменению параметров ее движения.
Если некоторые элементы СБЦ не были поражены, то они продолжают двигаться к Земле. При этом легкие элементы сгорают в атмосфере, а тяжелые сильно нагреваются и обнаруживаются ЛНЦ. При обнаружении целей ЛНЦ производит целераспределение (определяются точка прицеливания, назначаются ПУ ракет 1-го типа). Далее, стартует ракета 1-го типа и осуществляется наведение по алгоритму, приведенному выше, для стрельбы на средних высотах. Таким образом, СБЦ поражается двумя эшелонами комплекса: на средних и низких высотах. При этом все действия по поражению СБЦ производятся автоматически с помощью микропроцессорных систем ПБУ РЛОН, ЛНЦ и ПУ, а перехват цели отображается на дисплее обзора и наведения ПБУ, РЛОН, ЛНЦ. После завершения операции ПБУ выдает на вышестоящий КП донесение о характере цели, ее опасности и результатах стрельбы.
Рассмотрим вторую ситуацию, при которой поражается спутник на геостационарной орбите. По этому спутнику поступает от систем СПРН или СККП целеуказание (шесть или пять элементов орбиты), а с вышестоящего КП - команда на поражение его. Оператор ПБУ дублирует решение об обстреле цели и вводит в МПС команду назначения цели на обстрел. По этой команде ПБУ решает задачу целераспределения (определяется точка прицеливания (точка встречи ракеты с целью)), назначается ПУ ракет 4-го типа. Затем ПБУ выдает на РВЦ координаты точки прицеливания, а на ПУ с ракетой 4-го типа - команду о подготовке к старту. РВЦ выдает на ПУ команду на старт назначенной ракеты и производит поиск в секторе. При захвате ракеты радиолучом РВЦ, о чем с ракеты поступает донесение по линии радиосвязи, МПС РВЦ решает задачу наведения ракеты по радиолучу. Эта задача решается путем использования для данного типа космической цели полетного задания - закона движения радиолуча во времени в точку прицеливания. При этом полетное задание корректируется по конкретным исходным и конечным данным. В соответствии с полетным заданием (с участием таймера), радиолуч РВЦ, а следовательно, и ракета направляются в точку прицеливания.
При приближении ракеты на дальность действия ГСН в соответствии с полетным заданием включается радиолокационный канал ГСН. При захвате ГСН цели, управление ракетным двигателем передается на ГСН. При этом на РВЦ передается донесение о захвате ГСН цели. Если такого сигнала не последует, то РВЦ производит поиск ее путем движения радиолуча вокруг точки прицеливания. Ход выполнения полетного задания отображается на дисплее РВЦ и позволяет оператору контролировать этот ход.
При захвате цели ГСН радиолокационная часть определяет дальность ракеты до цели. При приближении ракеты на дальность действия БЧ ГСН выдает на БЧ команду вылета на механизм выбрасывания снарядов кассетной БЧ. Далее снаряды поражают цель аналогично первой ситуации.
Если в ходе операции с СПРН или СККП поступают новые целеуказания по цели, то они немедленно через ПБУ вводятся в РВЦ. При этом вновь решается задача наведения и реализуется новое наведение радиолуча РВЦ. Факт поражения цели должен быть зафиксирован средствами СПРН или СККП.
Предлагаемый комплекс отличается высокой степенью автоматизации всех процессов ведения боевой работы: оператор только принимает решение об обстреле цели, остальные действия производятся автоматически с помощью микропроцессорной техники.
Предлагаемый комплекс может быть интегрирован в любые группировки войск РКО (ПРО) и управляться с вышестоящих КП. Однако он может и автономно вести боевые действия, как было показано выше при поражении СБЦ.
Предлагаемый комплекс решает задачу интеграции средств ПВО, ПРО и ПКО, причем впервые. ЗРК способен выполнять задачу поражения космических целей. Благодаря применению ядерного ракетного двигателя, ядерной боевой части и усовершенствованной ГСН, значительно увеличилась зона и вероятность поражения целей. Впервые обеспечена возможность поражения сложной баллистической цели.
Комплекс отличается высокой степенью автоматизации всех процессов, благодаря применению во всех частях комплекса микропроцессорных систем, связанных между собой. Комплекс является многоканальным по числу целей и наводимых ракет. Поэтому он может одновременно обстрелять ориентировочно до 100 различных целей. Комплекс имеет высокую помехозащищенность. Комплекс является мобильным.
ПЕРЕЧЕНЬ ОСНОВНЫХ СОКРАЩЕНИЙ
АО - акционерное общество
АПДС - аппаратура передачи данных и связи
БПЛА - беспилотный летательный аппарат
БР - баллистическая ракета
БЧ - боевая часть
ВКУ - видеоконтрольное устройство
BOЛC - волоконно-оптическая линия связи
ГСН - головка самонаведения
ГЧ - головная часть
ЗРК - зенитный ракетный комплекс
ИЛ - инфракрасный локатор
ИО - инфракрасный обнаружитель
ИТ - инфракрасный тепловизор
КA - космический аппарат
КП - командный пункт
ИСУ - инерциальная система управления
ЛД - лазерный дальномер
ЛНЦ - лидар обзора и наведения для низколетящих целей
МПC - микропроцессорная система
ПБУ - пункт боевого управления
ПВО - противовоздушная оборона
ПВРКО - противовоздушноракетнокосмическая оборона
ПК - передающая телевизионная камера
ПКО - противокосмическая оборона
ПИМ - предохранительно-исполнительный механизм
ПРО - противоракетная оборона
ПУ - пусковая установка
РВЦ - радиолокатор наведения для высоколетящих целей
РД - ракетный двигатель
РЛОН - радиолокатор обзора и наведения
РЛС - радиолокационная станция
РП - ракета-перехватчик
РТКС - радиотелекодовая связь
СБЦ - сложная баллистическая цель
СДЦ - селекция движущихся целей
СККП - система контроля космического пространства
CПРH - система предупреждения о ракетном нападении
ТОС - телевизионно-оптическая система
ТПК - транспортно-пусковой контейнер
ФАР - фазированная антенная решетка
ЭПС - эффективная площадь рессеяния
ЭС - электростанция
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС БОРЬБЫ С ТАЙФУНАМИ И СМЕРЧАМИ | 2002 |
|
RU2228020C1 |
| Способ вывода ракеты в зону захвата цели головкой самонаведения и устройство для его осуществления | 2015 |
|
RU2613016C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| Способ поражения воздушной цели управляемой ракетой | 2019 |
|
RU2707637C1 |
| СПОСОБ ВОЗДУШНОЙ РАЗВЕДКИ НАЗЕМНЫХ (НАДВОДНЫХ) ОБЪЕКТОВ С ЦЕЛЬЮ ТОПОГЕОДЕЗИЧЕСКОГО, МЕТЕОРОЛОГИЧЕСКОГО И ДРУГИХ ВИДОВ ОБЕСПЕЧЕНИЯ ПУСКОВ (СБРОСОВ) УПРАВЛЯЕМЫХ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННЫХ ГОЛОВОК САМОНАВЕДЕНИЯ | 2020 |
|
RU2771965C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1996 |
|
RU2111445C1 |
| СИСТЕМА НАВЕДЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ | 2003 |
|
RU2284444C2 |
Изобретение относится к оборонительным системам, более конкретно к зенитным ракетным комплексам. Сущность изобретения заключается в том, что двигатель ракеты-перехватчика комплекса выполнен в виде конической мишени, включающей ядерное вещество, инициируемое посредством лазерного излучения для образования термоядерной реакции и создания сгустка плазмы с возможностью его вылета из отверстия, выполненного в вершине конуса конической мишени, вдоль оси ракеты-перехватчика или под углом к ней. Взрыватель боевой части выполнен в виде четырех попарно взаимно перпендикулярных конических мишеней, содержащих взрывчатое вещество с возможностью инициирования его посредством лазерного излучения для создания сгустка плазмы с возможностью его вылета из отверстия, выполненного в вершине конуса каждой конической мишени, и схлопывания в пространстве между другими конусами. Технический результат изобретения состоит в увеличении зоны и вероятности поражения воздушных, ракетных, космических целей. 1 ил.
Комплекс противовоздушной ракетно-космической обороны, содержащий радиолокаторы обзора пространства и наведения ракет, пункт боевого управления, пусковые установки и ракеты-перехватчики, включающие двигатель, боевую часть со взрывателем и головку самонаведения, отличающийся тем, что двигатель ракеты-перехватчика выполнен в виде конической мишени, включающей ядерное вещество, инициируемое посредством лазерного излучения для образования термоядерной реакции и создания сгустка плазмы с возможностью его вылета из отверстия, выполненного в вершине конуса конической мишени, вдоль оси ракеты-перехватчика или под углом к ней, при этом взрыватель боевой части выполнен в виде четырех попарно взаимно перпендикулярных конических мишеней, содержащих взрывчатое вещество с возможностью инициирования его посредством лазерного излучения для создания сгустка плазмы с возможностью его вылета из отверстия, выполненного в вершине конуса каждой конической мишени, и схлопывания в пространстве между другими конусами.
| Каталог “Оружие России | |||
| Высокоточное оружие и боеприпасы” | |||
| - М.: АОЗТ “Военный парад”, 1997, т.7, с.146-149 | |||
| RU 94014640 A1, 27.04.1996 | |||
| СПОСОБ ЗАЩИТЫ ОТ НИЗКОЛЕТЯЩИХ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2189558C2 |
| GB 1282609, 19.07.1972 | |||
| Способ персонального мониторинга при возникновении опасной ситуации и система для его реализации | 2017 |
|
RU2643448C1 |
| Способ импрегнирования абразивных инструментов | 2017 |
|
RU2676536C1 |
| DE 3421607, 12.12.1985. | |||

