Изобретение относится к области растениеводства, и, в частности, к оборудованию для проведения автоматизированных измерений морфометрических и спектральных параметров растений, культивируемых в условиях in vitro.
В настоящее время распространена технология получения высококачественного безвирусного посадочного материала в условиях in vitro. Для предотвращения нарушения микроклимата, сформированного в пробирке и исключения погрешностей из-за влияния человеческого фактора при проведении оценки роста и развития растений, предпочтительно использовать современные информационные технологии, позволяющие при помощи обработки фото-видеоизображений растений проводить исследования динамики роста растений, строить объемные модели и получать морфометрические параметры.
Из существующего уровня техники известны следующие установки для фото-видеофиксации изображений растений:
- Установка для фенотипирования растений (Интернет-ссылка https://www.lemnatec.com/products/laboratory-solutions/labscanalyzer/), состоящая из шкафов с RGB-камерами высокого разрешения и соответствующей подсветкой. В зависимости от конфигурации камеры могут устанавливаться в положении сверху и / или сбоку, а лампы доступны в виде панелей прямого или заднего освещения. Одним из основных недостатков является то, что установка не может быть использована для анализа растений в условиях in vitro.
- Установка для проведения флуоресцентного имаджинга в трёхмерном формате. (Интернет-ссылка http://spezlab.ru/impulsnyy-fluorimetr-3d-imaging-pam-dlya-provedeniya-fluorescentnogo-imadzhinga-v-trehmernom-formate.html) предназначена для анализа фотосинтетической активности растений в контексте их трёхмерной пространственной структуры. Импульсный флуориметр 3D IMAGING-PAM для проведения флуоресцентного имаджинга в трёхмерном формате содержит универсальный контрольно-управляющий модуль, специальный трёхмерный сканер, проектор, закрепленный на задней стороне, камеру расположенную вблизи растения, светодиодный блок светового облучения («синий»). К основным недостаткам данного устройства относится то, что установка не обеспечивает автоматический анализ показателей, нет фиксации в различных спектрах излучения.
Наиболее близкой к заявленному техническому решению является установка для получения изображения измеряемого объекта, растущего в условиях in vitro (патент РФ 148807 от 20.12.2014). Устройство содержит видеокамеры для получения изображений измеряемого объекта и источники света, установленные в корпусе с крышкой, внутри корпуса закреплен кронштейн прямоугольной формы с возможностью вертикального перемещения, регулируемый по высоте с помощью винтовой передачи, видеокамеры закреплены на каждой стороне кронштейна и внутренней стороне крышки таким образом, что точка пересечения осей объективов видеокамер находится на прямой, проходящей через центр корпуса, на дне корпуса с ориентировкой по центру расположена подставка в виде паллеты, на которой находится защитный бокс с измеряемым объектом, для подсветки измеряемого объекта на кронштейне за видеокамерами закреплены светодиоды, положение кронштейна относительно паллеты с измеряемым объектом определяется закрепленной внутри корпуса линейкой или датчиком положения, программное обеспечение для последующей обработки полученных изображений.
К недостатку указанного решения относится отсутствие возможности автоматических измерений параметров роста и развития растений, динамического изменения спектра излучения системы освещения для оценки состояния спектральных характеристик частей растения и идентификации грибковых и бактериальных проявлений инфекций и болезней.
Задача изобретения состоит в том, чтобы устранить недостатки прототипа.
Технический результат – обеспечение проведения автоматических измерений параметров роста и развития растений, построение 3-D модели растения для использования в научных исследованиях в лабораторных условиях in vitro за счет использования многоканального управляющего и вычислительного блока, обеспечивающего управление и обработку фото- и видеоинформации, а также определение и идентификация грибковых и бактериальных проявлений инфекций и болезней растений за счет наличия мультиспектральных источников света с возможностью динамического изменения спектра излучения системы освещения.
Поставленную задачу решает предложенное устройство, содержащее корпус, источники света, закрепленные за видеокамерами, подставку для размещения измеряемого объекта расположенную на дне корпуса, программное обеспечение для последующей обработки полученных изображений, в которое внесены новые признаки:
- корпус выполнен из каркаса и съемных, не пропускающих свет, панелей;
- в качестве источников света использованы мультиспектральные источники излучения, связанные с управляющим контроллером, что позволяет автоматически в соответствии с заданной программой изменять спектр излучения
- подставка для размещения изучаемого объекта представляет собой поворотную платформу, выполненную с возможностью вращения вокруг вертикальной оси, проходящей через ее центр, посредством электропривода, связанного с управляющим контроллером через драйвер электропривода;
- не менее двух фото-видеокамер для получения изображений измеряемого объекта размещены на подвижной платформе, которая выполнена с возможностью вертикального перемещения с помощью винтовой передачи в плоскости, параллельной оси вращения поворотной платформы посредством электропривода, связанного с управляющим контроллером через драйвер электропривода;
- программное обеспечение для последующей обработки полученных изображений реализуется многоканальным управляющим и вычислительным блоком, включающим программную логическую интегральную схему (далее ПЛИС) для предварительной обработки изображений, путем фильтрации, устранение дисторсий и при необходимости сшивки изображений, вычислитель с GPU ядрами выполняет математическую обработку серий изображений со всех ракурсов для каждого из заданных спектров освещения для получения 3D модели растения, управляющий контроллер, драйвер электропривода, энергонезависимую память хранения данных, а также встроенный в установку интерфейс Ethernet 17 для передачи оператором полученных результатов на удаленное рабочее место, что обеспечивает получение видеоданных и их обработку в реальном масштабе времени с автоматическим определением морфометрических и спектральных характеристик экземпляра растения.
Изобретение поясняется на графических изображениях:
Фиг.1. Изображение установки со снятыми передней и верхней панелью.
Фиг.2. Схема организации взаимодействия между компонентами системы для управления установкой для автоматического измерения параметров растений.
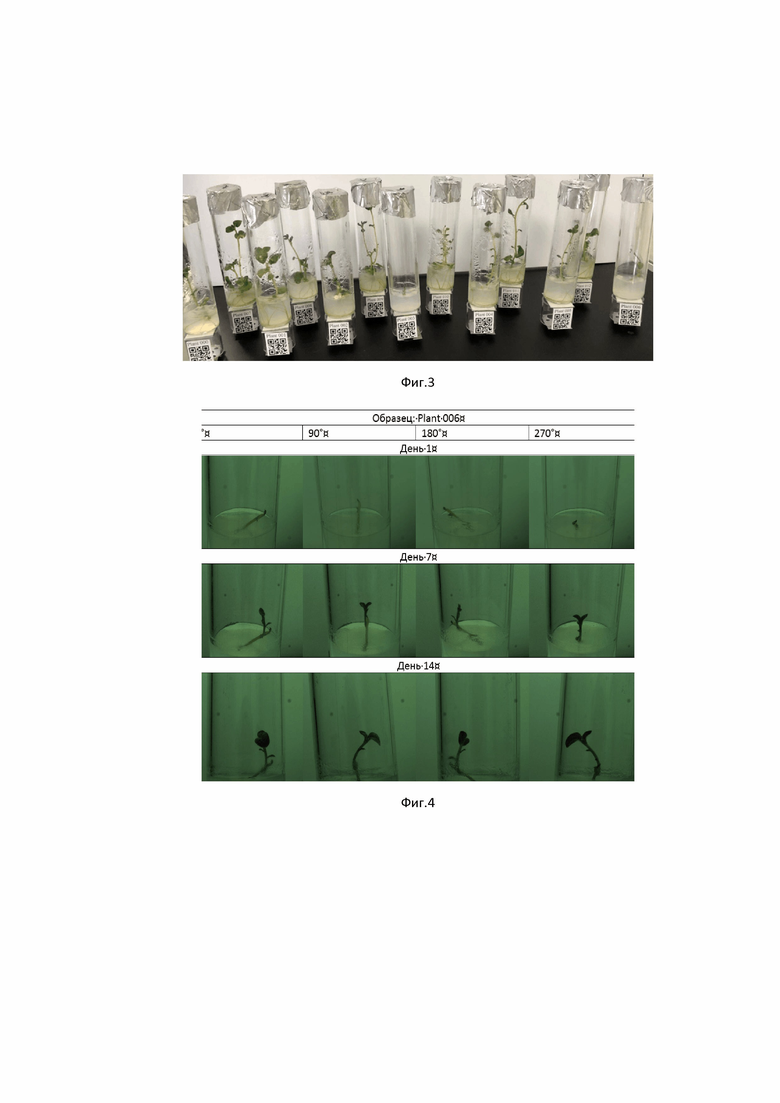
Фиг.3. Фотографии оцифрованных 13 пробирок с ростками мини-растений картофеля (Solanum tuberosum L.) культивируемых в условиях in vitro.
Фиг.4. Фотографии образца 006 при углах поворота пробирки: 0°, 90°, 180°, 270°, а также TimeLaps роста образца 006 по первому, седьмому и четырнадцатому дням фотосъемки.
Фиг.5. Фотографии образца 005 при углах поворота пробирки 0°, 90°, 180°, 270°, а также TimeLaps роста образца 005 по первому, седьмому и четырнадцатому дням фотосъемки.
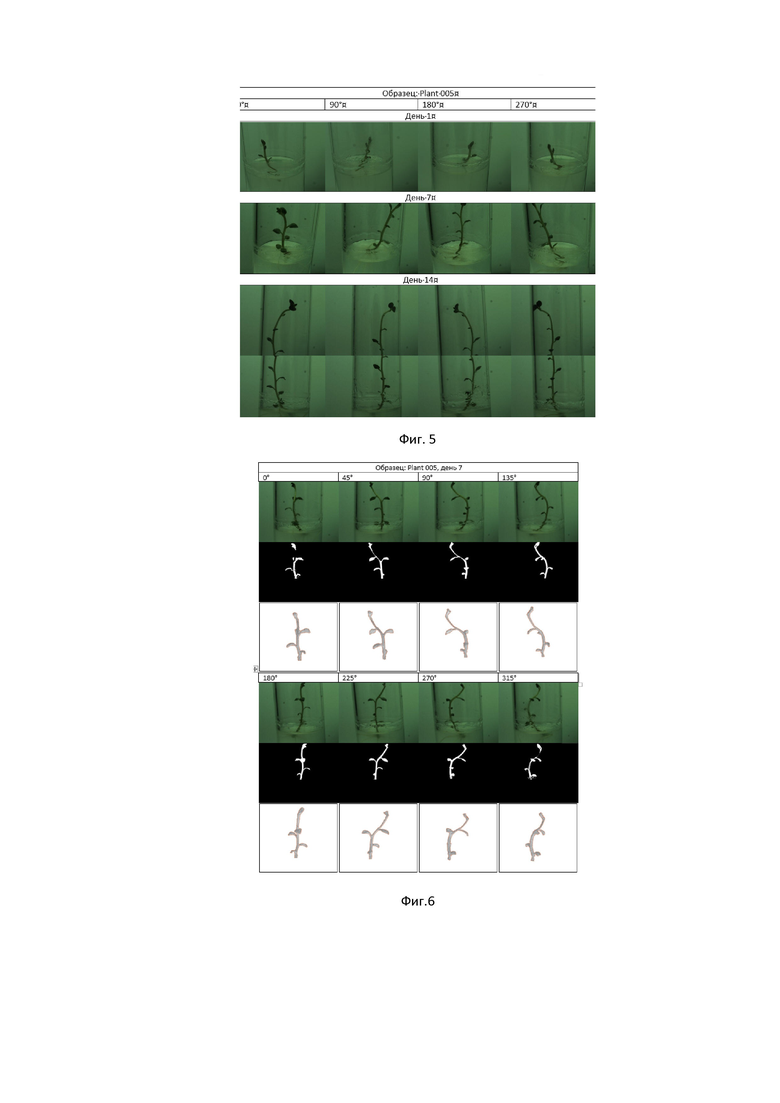
Фиг. 6. Фотографии растения образца 005 с различных ракурсов, выделение контура растения и демонстрация того же ракурса реконструированного растения.
Фиг. 7. Объемная реконструкция образца 005 с выделением скелета растения и его сегментацией на соответствующие органы – стебель и листья.
Фиг. 8. Примеры некоторых морфометрических параметров растения образца 005, которые были измерены в автоматическом режиме, приведен в таблице 1 и 2.
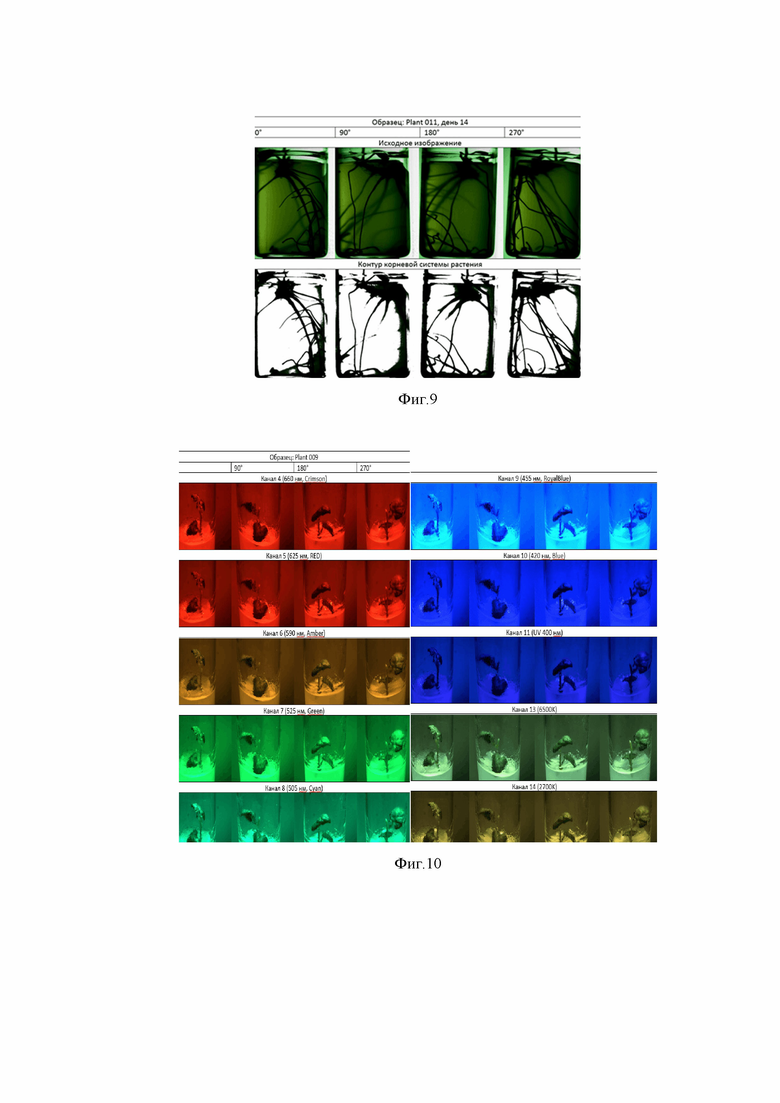
Фиг.9. Примеры изображений корневой системы образца 011 при углах поворота пробирки 0°, 90°, 180°, 270° и контрастирования корней для последующего анализа морфометрических параметров корневой системы, на основании которых выполняется расчет количества и объема корней.
Фиг.10. Фотографии для образца 009, выполненные при различных спектрах облучения RGB-сенсором камеры GigeGMT200.
Фиг.11. Фотографии образца 004, выполненные монохроматическим сенсором камеры GigeGMT200.
Фиг.12. Фрагменты видеоизображений образца 004, выполненные монохроматическим сенсором камеры EVS.
Фиг.13. Изображение контур растения образца 004, полученное при использовании излучения в синей и УФ-области спектра.
Фиг.14. Пример выявления и локализации инородного вкрапления, характеризующего наличие заражения на образце 004.
Полезная модель, изображенная на фигуре 1, включает корпус, состоящий из каркаса 1 и съемных, не пропускающих свет, панелей 2, внутри корпуса расположены: поворотная платформа 3, предназначенная для размещения пробирки 4 с анализируемым экземпляром растения, не менее 2-х фото-видеокамер 5, размещенных на подвижной платформе 6, что обеспечивает синхронную фиксацию изображений экземпляра растения с по крайней мере 2-х различных ракурсов. При этом платформа 6 выполнена с возможностью вертикального перемещения с помощью винтовой передачи в плоскости, параллельной оси вращения поворотной платформы 3, мультиспектральные источники излучения 7, установленные на фото-видеокамерах 5, для освещения экземпляра растения в пробирке 4 излучением с регулируемым спектром, приводы 8 для изменения положения платформ 3 и 6, дополнительный светильник 9, укрепленный под верхней панелью 2 и предназначенный для освещения внутренней части корпуса во время установки или замены пробирки с исследуемым образцом.
На фигуре 2 изображена схема организации взаимодействия между элементами установки, где 10 - многоканальный управляющий и вычислительный блок, обеспечивающий управление и обработку фото- и видеоинформации, 11 – источник питания, 12 – программная логическая интегральная схема (далее ПЛИС), 13 – вычислитель с GPU ядрами, 14 – управляющий контроллер, 15 – драйвер электропривода, 16 – энергонезависимая память хранения данных, 17 – сеть Ethernet, 18 – удаленное рабочее место, 5.1 и 5.2 - оптические сенсоры, 7.1 и 7.2 – мультиспектральные источники излучения, 8.1 и 8.2 – электроприводы платформ 3 и 6 соответственно.
Работает устройство следующим образом.
Оператор снимает панель 2, устанавливает внутрь установки на поворотную платформу 3 пробирку 4 с образцом растения, который требуется изучить, после чего устанавливает панель 2 на место, задает последовательность изменения спектров излучения для мультиспектральных источников излучения и режим вращения для поворотной платформы 3, и включает источник питания 11. Многоканальный управляющий и вычислительный блок 10 (фиг. 2) производит процесс измерения следующим образом. После включения источника тока 11, управляющий контроллер 14 подает управляющие сигналы на драйвер 15 электропривода, который посредством электроприводов 8.1 и 8.2 обеспечивает установку поворотной платформы 3 и подвижной платформы 6 с фото- видекамерами 5 в начальное положение. После чего выполняется цикл регистрации изображений, вычисления морфометрических параметров и определения наличия болезней, для чего управляющий контроллер 14 дает команду мультиспектральным источникам излучения 7.1 и 7.2 установить первый из определенных в настройках установки спектр излучения, затем на фото- видекамеры 5.1 и 5.2 поступает команда на проведение фотосъемки, данные с фото-видеокамер 5.1 и 5.2 поступают на ПЛИС 12, где осуществляется предварительная обработка изображений, например, фильтрация, устранение дисторсий и пр. Затем обработанные в ПЛИС 12 изображения поступают в вычислитель 13 с GPU ядрами. После чего управляющий контроллер 14 дает команду мультиспектральным источникам света 7.1 и 7.2. установить следующий спектр излучения и повторяет цикл регистрации изображений изучаемого растения в первоначальном ракурсе фото-видекамерами 5.1 и 5.2.
После выполнения циклов регистрации изображения во всех спектрах излучения для данного ракурса управляющий контролер 14 подает управляющий сигнал на драйвер электропривода 15 и посредством привода 8.1. поворотная платформа 3 поворачивается на заданный в настройках установки угол поворота для изменения положения пробирки 4 с изучаемым экземпляром растения и проведения фотосъемки изображения во всех спектрах излучения с другого ракурса. После завершения регистрации изображений для всех ракурсов экземпляра растения, т.е. после полного оборота платформы 3 вокруг вертикальной оси на угол 360 градусов, определяют необходимость выполнения съемки при другом положении платформы 6 с размещенными на них фото-видеокамерами 5.1 и 5.2. Эта необходимость возникает в случае, если экземпляр растения в пробирке 4 при проведении первого цикла измерений не охватывался полностью полем зрения оптических сенсоров фото-видеокамер. Управляющий контроллер 14 посредством подачи управляющих сигналов на драйвер электропривода 15 обеспечивает вертикальное перемещение подвижной платформы 6 с фото-видеокамерами 5 в следующее положение и циклы получения изображений повторяются.
По окончании получения всех необходимых фотоизображений управляющий контроллер 14 с помощью вычислителя 13 с GPU ядрами выполняет математическую обработку серий изображений со всех ракурсов для каждого из заданных спектров освещения для получения 3D модели растения. Если экземпляр растения не охватывался полностью полем зрения оптических сенсоров 5.1 и 5.2 при каждом цикле измерений, сначала производят «сшивку» изображений в каждом ракурсе для каждого из заданных спектров. Для определения начального опорного ракурса изображения, выполнения исследования динамики развития растений, а также автоматического определения идентификационного номера измеряемого растения на сериях изображениях используют этикетку с кодом, присвоенным данному изучаемому образцу (фиг.3). По положению платформы 3 в момент съемки этикетки, а также по ее межкадровому смещению определяют базовый ракурс для каждой пробирки.
В случае необходимости проведения видеосъемки, управляющий контролер 14 подает управляющий сигнал на драйвер электропривода 15 и посредством привода 8.1. поворотная платформа 3 начинает вращение с заданной программой скоростью для проведения видеосъемки изображения сначала в одном спектре. А после полного оборота платформы 3 на 360 градусов спектр автоматически меняется и видеосъемка повторяется пока не будет сформирован видеоряд во всех спектрах излучения.
Для обеспечения получения качественного видеоматериала были проведены исследования влияния автоматической экспозиции видеокамеры EVS при съемке экземпляров растений при облучении светом с различным спектром излучения:, при этом разрешение видео составляло 1280*720 пикселей, частота кадров 11 кадров/секунду. Битрейт составил 237442 kbps.
В результате проведенных исследований получены следующие результаты:
- скорость установки требуемой экспозиции в автоматическом режиме при смене спектра излучения составила 4-6 секунд для получения приемлемого изображения,
- видеопоток от данной видеокамеры EVS позволяет использовать видеокадры в качестве исходных фотокадров для математической модели, т.к. хорошее качество видеокадров обеспечивается отсутствием компрессии в видеопотоке. Причем возможна обработка только тех видеокадров в видеопотоке, которые приходят после установки экспозиции,
- при условии принудительного управления экспозицией камеры и управления синхронизацией кадров возможно добиться необходимой скорости получения видеокадров для обеспечения максимальной скорости получения необходимых для модели фотоданных.
Установлено, что изображения, полученные в различных спектрах, могут обладать дополнительной информацией о состоянии растения. Например, при освещении спектром излучения с длиной волны 505 нм (Cyan), 625 нм (RED) хорошо видны инородные вкрапления в растения, что характеризует наличие заражения, изображение которого можно локализовать при помощи средств компьютерного зрения.
С помощью вычислительного блока 13 изображения в различных отраженных спектрах обрабатываются с детекцией аномальных проявлений на растениях. После чего вся данная информация об изображениях, и аномальных проявлениях сохраняется в энергонезависимой памяти 16.
Также с помощью вычислительного блока 13 на основании разработанных алгоритмов осуществляют объемную реконструкцию в виде 3D модели и определяют морфометрические параметры растения, которые сохраняются в энергонезависимой памяти 16 установки. В случае, когда проводят исследования по измерениям динамических показателей роста и развития растений, вычисление этих параметров производят с учетом ранее измеренных и сохраненных данных в энергонезависимой памяти 16 устройства.
Вся информация о наличии признаков болезней, фотографии растений в различных ракурсах и с различными спектрами освещения, рассчитанные морфометрические параметры растения, а также динамическое изменение этих параметров при необходимости могут быть переданы оператором на удаленное рабочее место 18 (ПК) через встроенный в установку интерфейс Ethernet 17.
Примеры осуществления изобретения.
Пример 1
В ходе экспериментов было оцифровано 13 пробирок с ростками мини-растений картофеля (Solanum tuberosum L.) культивируемых в условиях in vitro. (фиг.3). Растения культивировали в лаборатории Инновационных методов исследования растительных объектов НИУ «БелГУ» в условиях in vitro на модифицированной питательной среде Мурасиге-Скуга при температуре 22-24°С и 16-часовом световом фотопериоде. Для каждой пробирки через равный промежуток времени равный 6 дням, проводили автоматизированную фотосьемку с использованием многоканального управляющего. Для осуществления процесса фотосъемки пробирку размещали на поворотной платформе 3, устанавливали на место открытую панель 2. Затем задавали нужные для проведения исследований параметры: последовательность включения спектров мультиспектральных источников излучения 7.1 и 7.2, угол поворота поворотной платформы 3. Затем включали источник питания и производили фотосьемку изучаемого растения в различных спектрах камерами Gige GMT200, а затем EVS. В соответствии с заданной программой вращение поворотной платформы 3 производили на угол поворота равный 11.25°. Таким образом, каждую пробирку фотографировали 32 раза для каждого спектра. Если растение имело длину, при котором оно полностью не вмещалось в кадр, то подвижную платформу 6 устанавливали в первоначальное положение таким образом, чтобы камеры производили фотосъемку начиная с нижнего уровня, затем подвижную платформу 6 поднимали на следующий уровень и фотосъемку повторяли до тех пор, пока растение не было отснято полностью.
На фиг. 4 показаны фото образца 006 при различных углах поворота пробирки: 0°, 90°, 180°, 270°, а также TimeLaps роста образца 006 по первому, седьмому и четырнадцатому дням фотосъемки. Результат «сшивки» изображений образца 005 не четырнадцатый день съемки, когда он уже не помещался полностью в кадр, в ракурсах при углах поворота пробирки 0°, 90°, 180°, 270°, а также TimeLaps роста образца 005 по первому, седьмому и четырнадцатому дням фотосъемки представлен на фиг. 5.
Пример 2
Пример получения морфометрических параметров растений. Для получения морфометрических параметров надземной части растения необходимо произвести его объемную реконструкцию. На фиг.6. показаны фотографии растения образца 005 с различных ракурсов, выделение контура растения и демонстрация того же ракурса реконструированного растения. После получения с помощью вычислителя 13 объемной модели растения, им же было произведено выделение скелета растения и его сегментация на соответствующие органы – стебель и листья (фиг.7). Далее были получены морфометрические признаки растения образца 005 в общем и для каждого органа растения, часть из которых, а также координаты расположения в пространстве всего растения и его надземных органов приведены в табл. 1 и табл. 2 на фиг.8. Определено расстояние между узлами графа растения:
D(a0, a1) = 2.35
D(a0, a9) = 15.66
D(a1, a2) = 2.92
D(a1, a3) = 2.86
D(a3, a4) = 4.87
D(a3, a5) = 4.09
D(a5, a6) = 5.2
D(a5, a7) = 4.29
D(a0, a9) = 5.36
D(a7, a8) = 2.06
D(a9, a10) = 7.6
Аналогично проводятся исследования корневой системы. На фигуре 9 приведен пример серии изображений для корневой системы образца 011, а также соответствующие им контрастированные изображения корней, на основании которых выполняется расчет количества и объема корней.
Пример 3
Каждое растение фотографировали в различных спектрах облучения мультиспектральными источниками излучения при каждом положении поворотного столика, а именно:
• Уровень свечения для канала 1 (945 нм, IR)
• Уровень свечения для канала 2 (855 нм, IR)
• Уровень свечения для канала 3 (730 нм, Chery RED)
• Уровень свечения для канала 4 (660 нм, Crimson)
• Уровень свечения для канала 5 (625 нм, RED)
• Уровень свечения для канала 6 (590 нм, Amber)
• Уровень свечения для канала 7 (525 нм, Green)
• Уровень свечения для канала 8 (505 нм, Cyan)
• Уровень свечения для канала 9 (455 нм, Royal Blue)
• Уровень свечения для канала 10 (420 нм, Blue)
• Уровень свечения для канала 11 (UV 400 нм)
• Уровень свечения для канала 12 (UV 368 нм)
• Уровень свечения для канала 13 (белый свет температуры 6500K)
• Уровень свечения для канала 14 (белый свет температуры 2700K).
Было установлено, что в результате обработки серий изображений в различных спектрах излучения в ПЛИС 12 и затем в вычислителе 13 с GPU ядрами путем сложения, вычитания, логарифмирования возможно получение дополнительной информации о состоянии растения: области фотосинтеза, сегментации органов, выделения областей аномальных проявлений и т.д.
Например, при использовании инфракрасных спектров облучения 855 и 945 нм, листья растения отражают падающее излучение и хорошо подсвечиваются на изображении, таким образом растение хорошо сегментируются на органы: стебель и листья. Кроме того, удается сегментировать лист на черешок и листовую пластинку, а затем на основании изображения каждой конкретной части растения и листа получать необходимую информацию морфометрических признаках и показателях роста и развития.
Для примера приведены фотографии для образца 009, выполненные при различных спектрах облучения RGB-сенсором камеры GigeGMT200 (фигура 10). Для образца 004 приведены фотоизображения, выполненные монохроматическим сенсором камеры GigeGMT200 (фигура 11) и фрагменты видеоизображений выполненные монохроматическим сенсором камеры EVS (фигура 12). Также следует отметить, что на изображениях, полученных в спектре облучения 855 нм есть возможность выделить и провести измерения в области растения, в котором происходит фотосинтез, т.е. только листовые пластинки (фигура 11).
При использовании излучения в синей и УФ-области спектра 455 нм (Royal Blue), 420 нм (Blue), 368 нм (UV), 420 нм (Blue) хорошо выделяется контур растения образца 004, информация о котором с различных ракурсов необходима для дальнейшей объемной реконструкции растения и его сегментации (Фигура 13).
При использовании излучения в спектрах 505 нм(Cyan) на фиг.12, 625 нм (RED) на фиг.11, хорошо детектируются видимые признаки аномальных проявлений на поверхности растения. На фигуре 14 приведен пример представления выявленного и локализованного, при помощи средств компьютерного зрения, инородного вкрапления, характеризующего наличие заражения на образце 004, возможно бактериальной или грибковой природы. Следовательно, такой образец необходимо передать на исследование для определения характера поражения. Также детектируются и изменения, связанные с различными факторами не оптимального культивирования данного объекта, которое можно локализировать при помощи анализа спектральных составляющих в отраженном излучении.
Таким образом, поставленная задача решена. Предложенное устройство обеспечивает проведение автоматических измерений параметров роста и развития растений, построение 3-D модели растения за счет использования многоканального управляющего и вычислительного блока, обеспечивающего управление и обработку фото- и видеоинформации, а также определение и идентификацию грибковых и бактериальных проявлений инфекций и болезней растений за счет наличия мультиспектральных источников света с возможностью динамического изменения спектра излучения системы освещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система формирования световой среды для выращиваемых в закрытом грунте растений | 2022 |
|
RU2804620C1 |
| Способ формирования оптимальной световой среды для выращиваемых в закрытом грунте растений и система светодиодного освещения, реализующая этот способ (варианты) | 2019 |
|
RU2719773C1 |
| Мультиспектральный фитооблучатель | 2023 |
|
RU2831187C1 |
| Устройство видеонаблюдения беспилотного воздушного судна, узел видеокамеры для такого устройства видеонаблюдения | 2023 |
|
RU2802978C1 |
| Способ освещения растений сверху при их выращивании в условиях закрытого грунта, обеспечивающий поддержание в процессе роста постоянного значения поверхностной плотности фотосинтетического потока на уровне листа, и реализующая данный способ система | 2021 |
|
RU2764546C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЙ ЛАЗЕРНЫЙ ФОТОСЕПАРАТОР | 2015 |
|
RU2605894C1 |
| Способ и устройство подавления засветки при формировании фото и видеоизображений дорожного окружения перед транспортным средством с помощью метода фантомных изображений | 2022 |
|
RU2788319C1 |
| УСТАНОВКА ДЛЯ ТЕСТИРОВАНИЯ ЧИПОВ КАСКАДНЫХ ФОТОПРЕОБРАЗОВАТЕЛЕЙ НА ОСНОВЕ СОЕДИНЕНИЙ Al-Ga-In-As-P | 2009 |
|
RU2391648C1 |
| СПОСОБ МУЛЬТИСПЕКТРАЛЬНОЙ ВИЗУАЛИЗАЦИИ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРИТИЧЕСКОГО РАЗМЕРА НАНОСТРУКТУР | 2014 |
|
RU2560245C1 |
| Способ фотодинамической диагностики и терапии центрального рака легкого и устройство его осуществления | 2019 |
|
RU2736909C1 |


Изобретение относится к области растениеводства, и в частности к оборудованию для проведения автоматизированных измерений морфометрических и спектральных параметров растений, культивируемых в условиях in vitro. Заявленное устройство для автоматического измерения параметров растений содержит корпус, источники света, закрепленные за видеокамерами, подставку для размещения изучаемого объекта, расположенную на дне корпуса, и программное обеспечение для последующей обработки полученных изображений. Корпус выполнен из каркаса и съемных, не пропускающих свет, панелей. В качестве источников света использованы мультиспектральные источники излучения, связанные с управляющим контроллером. Подставка для размещения измеряемого объекта представляет собой поворотную платформу, выполненную с возможностью вращения вокруг вертикальной оси, проходящей через ее центр, посредством электропривода, связанного с управляющим контроллером через драйвер электропривода, а также не менее двух фото-видеокамер для получения изображений измеряемого объекта размещены на подвижной платформе, которая выполнена с возможностью вертикального перемещения с помощью винтовой передачи в плоскости, параллельной оси вращения поворотной платформы, посредством электропривода, связанного с управляющим контроллером через драйвер электропривода. Программное обеспечение для последующей обработки полученных изображений реализуется многоканальным управляющим и вычислительным блоком, включающим программную логическую интегральную схему для предварительной обработки изображений путем фильтрации, устранения дисторсий и при необходимости сшивки изображений; вычислитель с GPU ядрами для математической обработки серий изображений со всех ракурсов для каждого из заданных спектров освещения и получения 3D-модели растения; управляющий контроллер; драйвер электропривода; энергонезависимую память хранения данных; а также встроенный в установку интерфейс Ethernet для передачи оператором полученных результатов на удаленное рабочее место. Технический результат - обеспечение проведения автоматических измерений параметров роста и развития растений, построение 3D-модели растения для использования в научных исследованиях в лабораторных условиях in vitro за счет использования многоканального управляющего и вычислительного блока, обеспечивающего управление и обработку фото- и видеоинформации, а также определение и идентификация грибковых и бактериальных проявлений инфекций и болезней растений за счет наличия мультиспектральных источников света с возможностью динамического изменения спектра излучения системы освещения. 10 ил.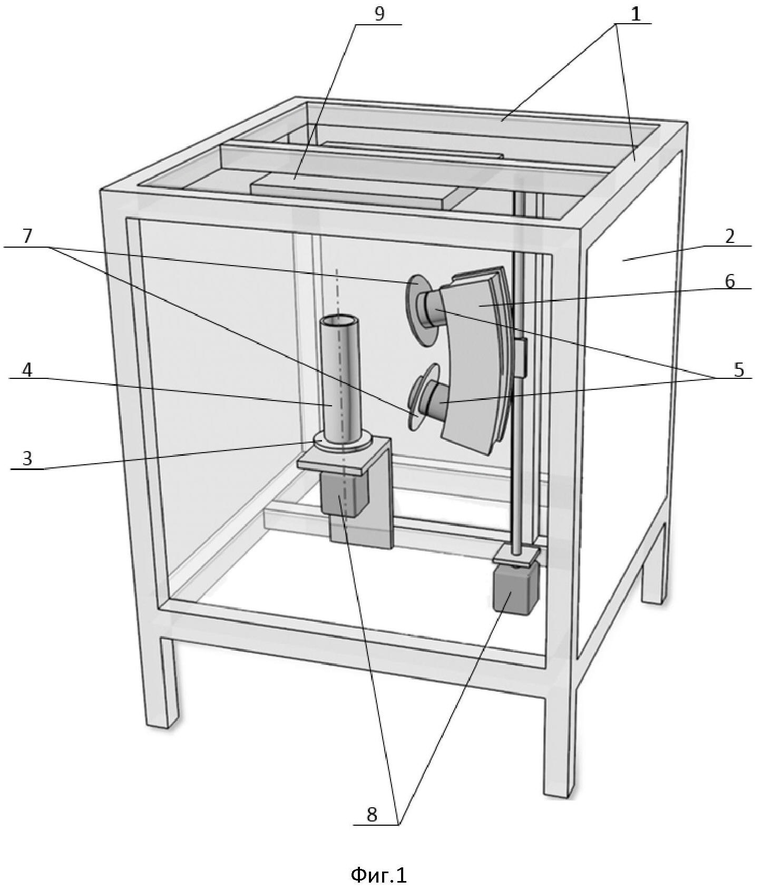
Устройство для автоматического измерения параметров растений, содержащее корпус, источники света, закрепленные за видеокамерами, подставку для размещения изучаемого объекта, расположенную на дне корпуса, программное обеспечение для последующей обработки полученных изображений, отличающееся тем, что корпус выполнен из каркаса и съемных, не пропускающих свет, панелей; в качестве источников света использованы мультиспектральные источники излучения, связанные с управляющим контроллером, подставка для размещения измеряемого объекта представляет собой поворотную платформу, выполненную с возможностью вращения вокруг вертикальной оси, проходящей через ее центр, посредством электропривода, связанного с управляющим контроллером через драйвер электропривода, не менее двух фото-видеокамер для получения изображений измеряемого объекта размещены на подвижной платформе, которая выполнена с возможностью вертикального перемещения с помощью винтовой передачи в плоскости, параллельной оси вращения поворотной платформы, посредством электропривода, связанного с управляющим контроллером через драйвер электропривода; программное обеспечение для последующей обработки полученных изображений реализуется многоканальным управляющим и вычислительным блоком, включающим программную логическую интегральную схему для предварительной обработки изображений путем фильтрации, устранения дисторсий и при необходимости сшивки изображений, вычислитель с GPU ядрами для математической обработки серий изображений со всех ракурсов для каждого из заданных спектров освещения и получения 3D-модели растения, управляющий контроллер, драйвер электропривода, энергонезависимую память хранения данных, а также встроенный в установку интерфейс Ethernet 17 для передачи оператором полученных результатов на удаленное рабочее место.
| 0 |
|
SU148807A1 | |
| CN 105547152 A, 04.05.2016 | |||
| US 10175362 B2, 08.01.2019 | |||
| CN 109238166 A, 18.01.2019 | |||
| CN 202634550 U, 26.12.2012 | |||
| CN 202798997 U, 13.03.2013. | |||

