Группа изобретений относится к устройствам видеонаблюдения и может быть использовано для беспилотных воздушных судов (БВС), в том числе с максимальной взлетной массой менее 1,5 кг.
Изобретение решает задачу по минимизации массы и габаритов БВС с установленным на него устройством видеонаблюдения при сохранении высоких характеристик последнего, среди которых важнейшими являются: видеопоток с разрешением не ниже 4К и наличие оптического увеличения изображения для камеры видимого спектра, наличие тепловизионной камеры с разрешением не ниже 640×512 пикселей, механическая стабилизация по трем осям. Масса БВС напрямую зависит от массы полезной нагрузки (при заданной продолжительности полета). При максимальной взлетной массе БВС менее 1,5 кг и продолжительности полета не менее 40 минут масса полезной нагрузки не должна превышать 120 г.
В настоящее время известны БВС четырехроторного типа с массой менее 1,5 кг, которые оснащены камерами оптического спектра, например инфракрасного, тепловизионного и камерой видимого диапазона, тем не менее, решений способных удовлетворять все задачи, поставленные перед изобретением из уровня техники не известны. Как правило, расширение функциональных возможностей устройства видеонаблюдения приводит к увеличению его массогабаритных параметров модуля полезной нагрузки и соответственно к увеличению габаритов самого БВС при расширении функциональных возможностей узла видеокамеры.
Известны бифокальная камера, подвесная система и мобильная платформа (международная публикация WO2020087697A1 от 07.05.2020, приоритетный документ CN201821798864U·заявка CN2018122114W·от 19.12.2018, патентообладатель: SZ DJI TECHNOLOGY CO LTD (CN)).
Камера с двумя источниками света включает в себя: передний корпус, средний корпус, задний корпус, первый модуль камеры и второй модуль камеры; передний корпус, средний корпус и задний корпус последовательно соединены и заключают в себе приемную полость. Передняя оболочка включает переднюю стенку и заднюю стенку передней оболочки, расположенные напротив друг друга. Задняя стенка передней оболочки расположена в приемной полости, а задняя стенка передней оболочки утоплена в сторону передней стенки приемной полости передней оболочки и второй приемной полости; первый модуль камеры включает в себя первую печатную плату и корпус первого модуля, причем первая печатная плата установлена на задней стенке переднего корпуса и/или среднего корпуса, Корпус первого модуля проходит в первое приемное пространство; второй модуль камеры включает в себя вторую печатную плату и корпус второго модуля, причем вторая печатная плата установлена за передним корпусом на стене и/или среднем корпусе, корпус второго модуля проходит во второе приемное пространство; средний корпус снабжен соединительной частью, а соединительная часть используется для соединения двойной оптической камеры с подвесом.
Аналог также имеет карданную систему, включающую в себя подвес и вышеупомянутую камеру с двумя источниками света и мобильную платформу, включающую в себя корпус и систему поворота/наклона. При этом карданная система установлена на корпусе мобильной платформы.
Патент подробно описывает механическую конструкцию блока камеры, установленного на 3-осевом подвесе. В нем также используется две камеры: видимого спектра и ИК-спектра. К каждой камере подключается отдельная плата управления, после чего они подключаются к общей плате.
К недостаткам известного аналога по отношению к заявляемой группе изобретений можно отнести сложность его конструкции, влияющую на массогабаритные параметры модуля полезной нагрузки и ограничение функциональных возможностей, так как в данном изделии используется только одна оптическая система для видимого спектра.
Из патента CN110730287A – прототип заявляемого технического решения (Заявка CN201911018698A, приоритет от 24.10.2019, патентообладатель: Shenzhen Autel Intelligent Aviation Tech Co Ltd) известны система видеонаблюдения беспилотного летательного аппарата и съемная наклонно-поворотная камера такой системы.
Система видеонаблюдения беспилотного летательного аппарата включает беспилотный летательный аппарат, наклонно-поворотную камеру, выполненную в виде подвеса, сервер и приемную часть изображения, и обеспечивает связь БВС с сервером и средством приема изображения. Съемная наклонно-поворотная камера такой системы выполнена в виде подвеса к корпусу БВС (полезной нагрузки) и содержит стабилизатор включающий: модуль получения изображения, который расположен на повороте/наклоне и используется для получения изображения, статический модуль хранения для хранения данных параметров, при этом модуль обработки изображений расположен в корпусе БВС и обеспечен возможностью связи со статическим модулем хранения для считывания данных параметров, хранящихся в статическом модуле хранения.
Так как известное техническое решение имеет камеру видимого спектра только с одним сенсором и одной системой линз оно не имеет функции оптического приближения изображения, то есть обладает ограниченным спектром функциональных возможностей.
Задачей заявляемой группы изобретений является создание нового устройства видеонаблюдения на базе компактного складного БВС с массой менее 1,5 кг, узел видеокамеры которого обеспечивает механическую стабилизацию в трех осях, гибридное увеличение не менее ×10 и разрешение видео не хуже 4К.
Техническим результатом заявляемой группы изобретений по отношению к известным из уровня техники техническим решениям является расширение функциональных свойств устройства видеонаблюдения без увеличения массы полезной нагрузки.
Устройство видеонаблюдения беспилотного воздушного судна, включающее бортовое средство управления и модуль полезной нагрузки, отличается от прототипа тем, что бортовое средство управления содержит процессорный модуль обработки видеоизображений, модуль полезной нагрузки выполнен в виде узла видеокамеры, содержащего модуль видимого спектра с двумя сенсорами и двумя линзами, тепловизионный модуль, модуль управления подвесом и снабжен механизмом стабилизации, взаимодействие процессорного модуля обработки видеоизображений и узла видеокамеры осуществляется посредством набора микрокоаксиальных кабелей и гибкого соединительного шлейфа, которые могут включать интерфейс USB для передачи сигнала от тепловизионного модуля, интерфейс MIPI CSI для передачи сигнала от сенсоров модуля видимого спектра, интерфейс I2C для управления сенсорами и CAN интерфейс для управления узлом видеокамеры.
Узел видеокамеры, имеющий модуль видимого спектра с двумя сенсорами и двумя линзами, содержащий плату сенсоров видимого спектра, на которой установлены линзы с разным фокусным расстоянием, тепловизионный модуль, выполненный в виде тепловизионной радиометрической камеры, подключенной к модулю управления подвесом, и механизм стабилизации, включающий электронную схему стабилизации, которой снабжен модуль управления подвесом, и бесколлекторные моторы по количеству осей стабилизации.
Механизм стабилизации узла видеокамеры для устройства видеонаблюдения беспилотного воздушного судна, реализован следующим образом, электронная схема стабилизации модуля управления подвесом включает контроллер управления, инерциальную систему и драйвера моторов, имеющих обратную связь с бесколлекторными моторами посредством датчиков определения положения, основанных на эффекте Холла.
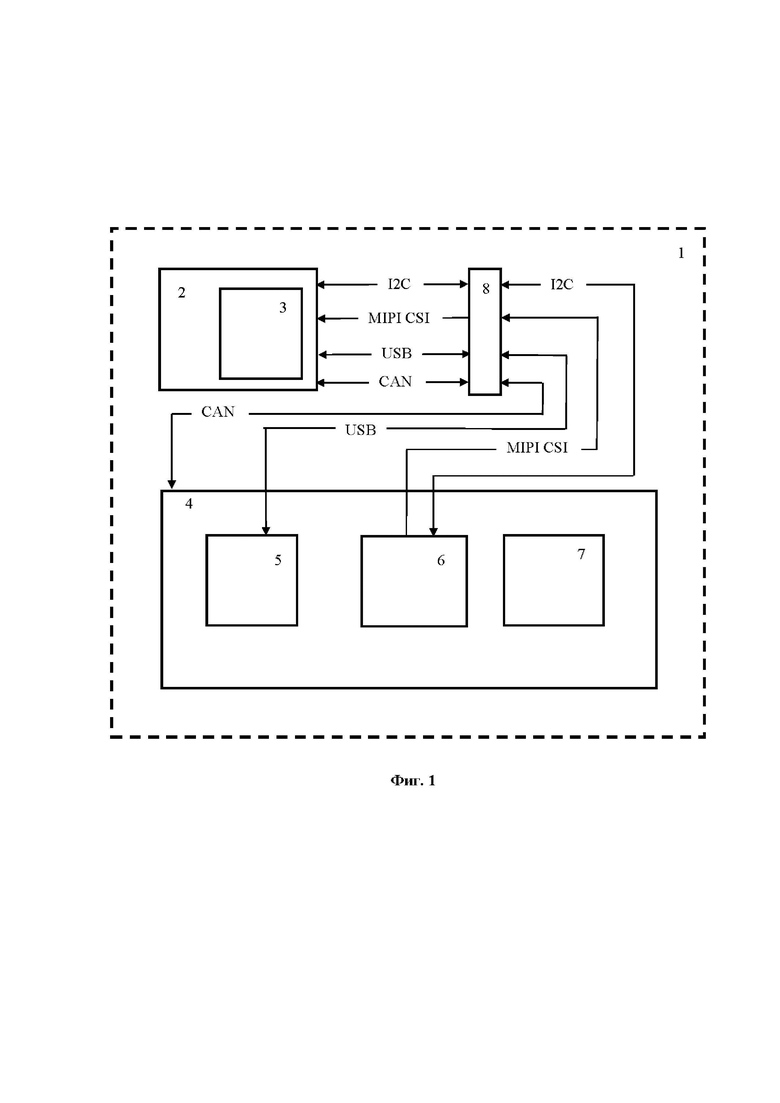
На фиг. 1 представлена структурная блок схема устройства видеонаблюдения беспилотного воздушного судна в соответствии с заявляемым техническим решением, где:
1 – устройство видеонаблюдения беспилотного воздушного судна; 2 – бортовое средство управления; 3 – процессорный модуль обработки видеоизображений; 4 – узел видеокамеры; 5 – тепловизионный модуль; 6 –модуль видимого спектра; 7 – модуль управления подвесом; 8 – гибкий соединительный шлейф; USB, MIPI CSI, I2C – интерфейсы взаимодействия.
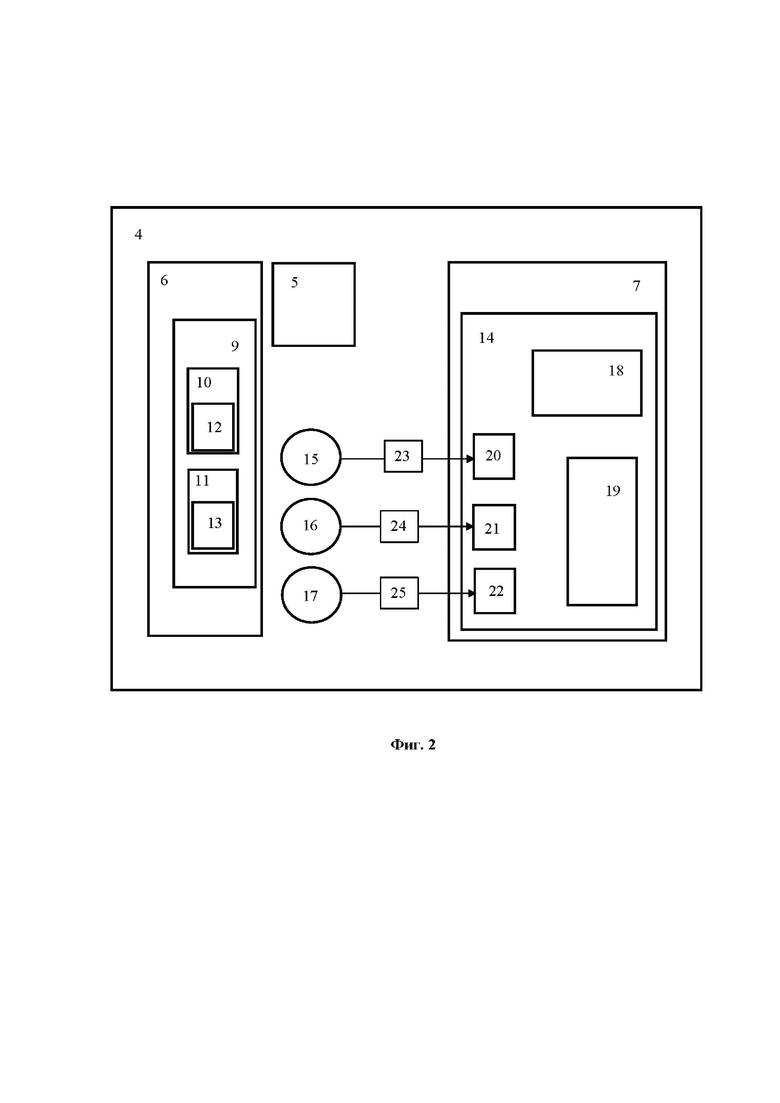
На фиг. 2 представлена структурная блок схема узла видеокамеры для такого устройства видеонаблюдения в соответствии с заявляемым техническим решением, где:
4 – узел видеокамеры; 5 – тепловизионный модуль; 6 – модуль видимого спектра; 7 – модуль управления подвесом; 9 – плата сенсоров; 10-11 – сенсоры видимого спектра, 12-13 – линзы; 14 – электронная схема стабилизации; 15-17 - бесколлекторные моторы; 18 – контроллер управления; 19 - инерциальная система; 20-22 – драйвера моторов; 23-25 – датчики определения положения.
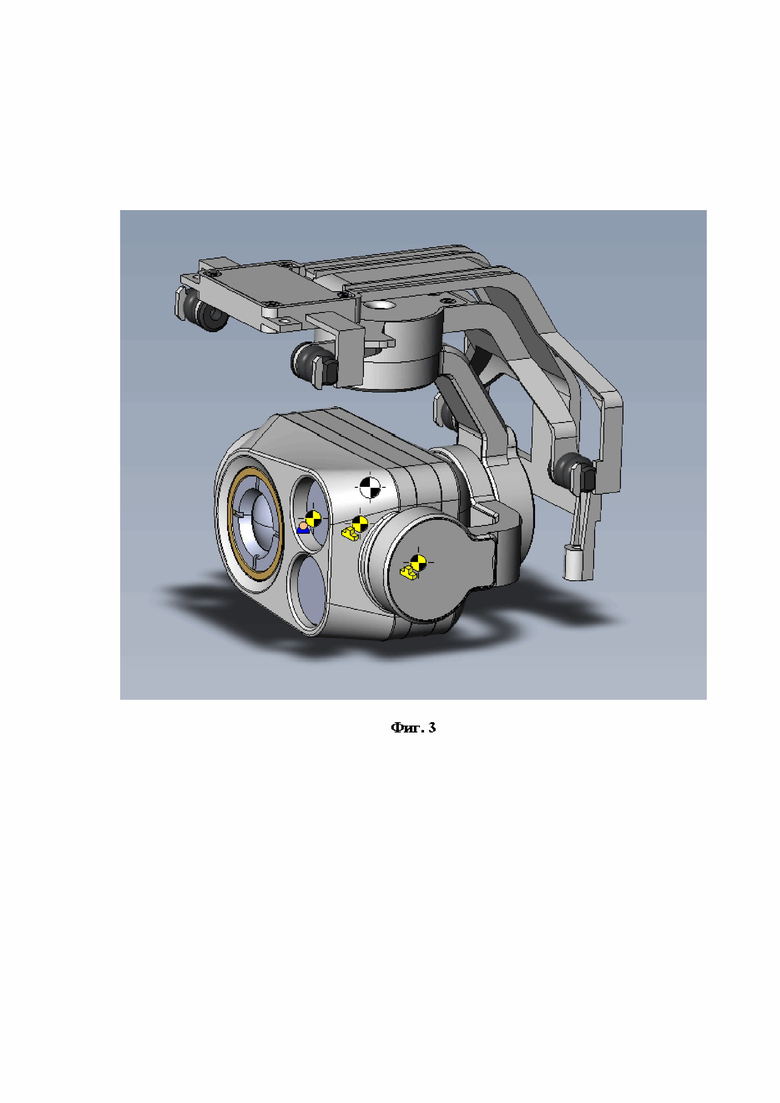
На фиг. 3 – представлен общий вид модуля полезной нагрузки с подвесом.
Заявляемая группа изобретений решает проблему расширения функциональных свойств устройства видеонаблюдения для БВС с максимальной взлетной массой менее 1,5 кг без увеличения массы полезной нагрузки.
Для этого в заявляемом новом устройстве видеонаблюдения на базе компактного складного БВС с массой менее 1,5 кг, модуль полезной нагрузки обеспечивает гибридное увеличение не менее х10 и разрешение видео не хуже 4К, а также механическую стабилизацию в трех осях за счет реализации в нем механизма стабилизации.
Из уровня техники известны модули полезной нагрузки выполняющие функции по ИК съемке и видео записи, однако данные решения не применимы для БВС с массой менее 1,5 кг, помимо того, из уровня техники известны модули полезной нагрузки для БВС с массой до 1,5 кг, но не обладающие полным спектром функциональных возможностей для выполнения поставленных перед новым устройством видеосъемки 1 (фиг. 1) задач.
Для устранения указанных недостатков предлагается техническое решение, которое осуществляется следующим образом.
Во-первых, обработка видеоизображений вынесена на борт БВС, для чего бортовое средство 2 управления снабжено процессорным модулем 3 обработки видеоизображений, что позволило отказаться от дополнительных плат и снизить массогабаритные параметры модуля полезной нагрузки и соответственно узла видеокамеры 4.
Взаимодействие процессорного модуля 3 обработки видеоизображений и узла видеокамеры 4 осуществляется посредством набора микрокоаксиальных кабелей и гибкого соединительного шлейфа 8.
Причем набор микрокоаксиальных кабелей и гибкого соединительного шлейфа 8 включают интерфейс USB для передачи сигнала от тепловизионного модуля 5, интерфейс MIPI CSI для передачи сигнала от сенсоров модуля 6 видимого спектра, интерфейс I2C для управления сенсорами 10 и 11 и CAN интерфейс для управления положением механизма стабилизации узла видеокамеры 4.
Таким образом данные изображения передаются последовательно по отдельным линиям передачи сигналов непосредственно от сенсора на процессор, без использования дополнительных преобразователей. Максимальная пропускная способность зависит от количества этих линий, например, при реализации могут быть использованы четыре дифференциальные пары данных и одна дифференциальная пара для тактирования сигналов, что позволило снизить количество соединительных проводов.
Во-вторых, расширение функциональных возможностей за счет наличия оптического увеличения изображения. Заявляемый узел видеокамеры 4 позволяет достигать гибридного увлечения х10 без потери качества в разрешении 720p.
Для этого, узел видеокамеры 4 имеет модуль 2 видимого спектра с двумя сенсорами 10 и 11 и двумя, установленными на сенсоры линзами 12 и 13, для чего сенсоры 10 и 11, в свою очередь, размещены на плате 9 сенсоров видимого спектра. Причем линзы 12 и 13 имеют разное фокусное расстояние, например, 16 мм и 4,35 мм.
Гибридное увеличение означает следующее. За счет разного фокусного расстояния и избыточного разрешения (больше, чем целевое). Переключение сенсоров дает увеличение в 3.7 раз. Это и есть «честное» оптическое увеличение, так как оно достигается за счет смены оптики. 10х кратное соответственно достигается цифровым увеличением по принципу: цифровое увеличение -> смена сенсора -> цифровое увеличение.
Следует отметить, что размещение двух сенсоров на один печатный узел – плате сенсоров 9 позволило отказаться от оптического трансфокатора для оптического увеличения, так как он обладает большой массой и габаритами, что также положительно повлияло на массогабаритные параметры модуля полезной нагрузки.
Тепловизионный модуль 5 выполнен в виде тепловизионной радиометрической камеры и подключен к модулю управления подвесом 7, так как он управляет механизмом стабилизации, которым снабжен узел видеокамеры 4 для обеспечения качества передаваемых изображений, что помимо прочего дает конструктивное удобство.
Механизм стабилизации узла видеокамеры 4 в трех осях реализован следующим образом, модуль управления подвесом 7 имеет электронную схему стабилизации 14, которая включает контроллер управления 18 (вычислительное средство), инерциальную систему 19 для определения угловых скоростей и ускорений и драйвера моторов 20 – 22, преобразовывающие управляющие сигналы малой мощности в токи, достаточные для управления моторами. Причем драйвера моторов 20 – 22 соединены с бесколлекторными моторами 15 – 17 посредством датчиков 23 – 25 определения положения, основанных на эффекте Холла для определения положения и синхронизации работы бесколлекторных моторов 15 – 17 механизма стабилизации.
Такое решение позволило расположить центр масс узла видеокамеры 4 в центре осей стабилизации, что дало возможность не создавать постоянный крутящий момент для поддержания узла видеокамеры 4 в определенном положении, а лишь компенсировать отклонения.
Резюмируя изложенное выше.
Для реализации предлагаемого технического решения предложены новое устройство видеонаблюдения беспилотного воздушного судна, узел видеокамеры для такого устройства видеонаблюдения и механизм стабилизации для такого узла видеокамеры, которые в совокупности обладают следующими характеристиками:
- Разрешение видео – 4К;
- Наличие оптического зума для камеры видимого спектра;
- Наличие тепловизионной камеры;
- Механическая стабилизация по 3 осям.
При соблюдении условия общей массы БВС в 1500 г и массой полезной нагрузки не более 120 г, то есть расширяются функциональные свойства устройства видеонаблюдения без увеличения массы модуля полезной нагрузки.
Таким образом заявляемая группа изобретений с указанной совокупностью существенных признаков позволяет решать поставленные задачи и, как следствие, достигать заявленного технического результата.
Работа устройства видеонаблюдения беспилотного воздушного судна, узла видеокамеры для такого устройства видеонаблюдения и механизма стабилизации для такого узла видеокамеры осуществляется следующим образом.
Основное назначение устройств видеонаблюдения БВС – это фото- и видеосъемка различных объектов, поэтому они, как правило, оснащаются управляемыми подвесами для камер. Управление полетом БВС происходит посредством пульта дистанционного управления - пульта или мобильного устройства (смартфона или планшета). Камера и подвес (полезная нагрузка фиг. 3) также контролируются пилотом (или вторым оператором через ведомый пульт), так как их система управления интегрирована в общую систему управления БВС и представляет собой устройство видеонаблюдения 1. Работой всего устройства видеонаблюдения 1 управляет процессор бортового средства управления 2, расположенный на процессорном модуле, базовой платы БВС.
На фюзеляже БВС размещают подвес с модулем полезной нагрузки фиг. 3, который выполнен в виде узла видеокамеры 4 фиг. 2. Посредством гибкого соединительного шлейфа 8 подключают узел видеокамеры 4 к бортовому средству управления 2. Таким образом контроллер управления подвесом 18, расположенный в модуле управления подвесом 7 узла видеокамеры 4, подключается к общей бортовой CAN-шине, и взаимодействует не только с процессорным модулем обработки изображения 3, но и с полетным контроллером бортового средства управления 2 для корректировки движением БВС.
Благодаря наличию двух видеомодулей – модуля видимого спектра 6 и тепловизионного модуля 5 – узел видеокамеры 4 позволяет не только обнаруживать движение (людей и/или транспорта) в среднем ИК-диапазоне, но и получать традиционное цветное изображение.
Посредством интерфейса USB процессорный модуль обработки видеоизображений 3 бортового средства управления 2 настраивает параметры тепловизионного модуля 5 и получает видеоизображение для дальнейшей обработки. Видеоизображения от модуля видимого спектра 6 получают по интерфейсу MIPI CSI.
Благодаря тому, что в узле видеокамеры 4 модуль видимого спектра 6 оснащен двумя сенсорами 10 и 11 видимого спектра и двумя линзами 12 и 13 с различным фокусным расстоянием устройство видеонаблюдения 1 обладает более высоким разрешением и увеличенным фокусным расстоянием, а получаемые пилотом изображения отличаются большей детализацией. Сенсоры 10 и 11 видимого спектра конфигурируются через интерфейс I2C (оба сенсора через один интерфейс) и подключены как «Ведущий» и «Ведомый». При этом сенсоры 10 и 11 работают попеременно: в нормальном режиме работает один сенсор, при увеличении более 3.7 крат включается второй сенсор при этом переключение сенсоров возможно с использованием одних и тех же линий для передачи, в том числе за счет их расположения на одной плате сенсоров 9, которая их синхронизирует.
Высокое разрешение, реализованное узлом видеокамеры 4 без механизма стабилизации имеет большие потери качества изображения.
Механизм стабилизации узла видеокамеры 4 дает пилоту возможность фотографировать или снимать видео без влияния на качество кадров от вибрации или дрожания модуля полезной нагрузки. Внешние воздействия на узел видеокамеры 4 возникают в ходе маневров БВС в воздухе, из-за работы двигателей и пропеллеров, а также от воздействия ветра или других внешних факторов. Поэтому модуль полезной нагрузки устройства видеонаблюдения 1 снабжен механизмом стабилизации, который управляется посредством модуля управления подвесом 7 стабилизируя узел видеокамеры 4 в 3-х осях, и работает следующим образом.
Модуль управления подвесом 7 снабжен электронной схемой стабилизации 14, инерциальная система 19 которой передает данные об осевом положении узла видеокамеры 4 в контроллер управления 18, который в свою очередь, решая задачу стабилизации узла видеокамеры 4, выдает управляющие сигналы на моторы 15-17 с помощью драйверов моторов 20-22.
Для определения положения ротора относительно статора в бесколлекторных моторах 15-17 используют датчики 23-25, основанные на эффекте Холла, имеющие обратную связь к контроллеру управления 18. При этом количество бесколлекторных моторов 15-17, драйверов моторов 20-22 и датчиков 23-25 соответствует количеству осей стабилизации.
Заявляемая группа изобретений полностью удовлетворяет указанным требованиям, что подтверждается результатами разработки Заявителем такого устройства и следующими факторами:
1. Наличие на рынке доступных сенсоров которые обладают высоким разрешением (12 МПикс), большим размером пикселя, малыми габаритами. Кроме того, они требует минимального набора дополнительных электрорадиоизделий, что позволяет разместить их на печатной плате минимальных размеров;
2. Отказ от оптического трансфокатора для оптического увеличения, взамен которого на один печатный узел установлены два сенсора с объективами с разным фокусным расстоянием. Увеличение реализовано гибридным способом (цифровое увеличение -> смена сенсора -> цифровое увеличение);
3. Наличие на рынке тепловизионной радиометрической камеры с минимальными массой и габаритами;
4. Для передачи сигнала от сенсора до процессора обработки используются микрокоаксиальные кабели, позволяющие передавать высокоскоростные сигналы по интерфейсу MIPI CSI;
5. Для механической стабилизации применяются очень компактные и эффективные бесколлекторные моторы, управляемые специальным модулем управления гироподвесом;
6. Обработка видеоизображений была вынесена из видеокамеры на борт БВС, на котором установлен вычислитель с производительным процессором (процессорный модуль обработки видеоизображений), который позволил подключить сенсоры по интерфейсу MIPI CSI, а тепловизионную камеру – по USB.
Полевые испытания опытного образца устройства видеонаблюдения доказали его работоспособность и пригодность для получения данных высокого разрешения без потери качества изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Портативный поворотный механизм для видеокамеры | 2024 |
|
RU2831920C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| КОМПЛЕКС ОПТИЧЕСКОГО ВИДЕОНАБЛЮДЕНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ ДЛЯ МОРСКИХ И РЕЧНЫХ СУДОВ | 2023 |
|
RU2816392C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Оптико-электронная многоканальная головка самонаведения | 2020 |
|
RU2756170C1 |
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |
Группа изобретений относится к устройству видеонаблюдения беспилотного воздушного судна и узлу видеокамеры для этого устройства. Устройство содержит бортовое средство управления с процессорным модулем обработки видеоизображений. Узел видеокамеры содержит модуль видимого спектра с двумя сенсорами и двумя линзами, тепловизионный модуль, модуль управления подвесом и механизм стабилизации. Обеспечивается расширение функциональных свойств устройства видеонаблюдения без увеличения массы полезной нагрузки. 2 н. и 2 з.п. ф-лы, 3 ил.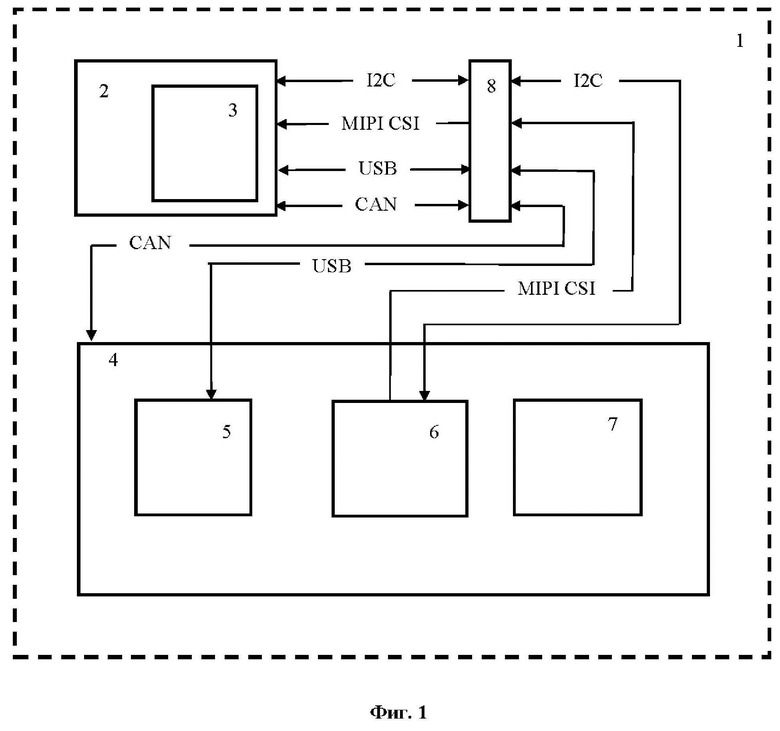
1. Устройство видеонаблюдения беспилотного воздушного судна, включающее бортовое средство управления и модуль полезной нагрузки, отличающееся тем, что бортовое средство управления содержит процессорный модуль обработки видеоизображений, модуль полезной нагрузки выполнен в виде узла видеокамеры, содержащего модуль видимого спектра с двумя сенсорами и двумя линзами, тепловизионный модуль, модуль управления подвесом и снабженного механизмом стабилизации, взаимодействие процессорного модуля обработки видеоизображений и узла видеокамеры осуществляется посредством набора микрокоаксиальных кабелей и гибкого соединительного шлейфа.
2. Узел видеокамеры, имеющий модуль видимого спектра с двумя сенсорами и двумя линзами, содержащий плату сенсоров видимого спектра, на которой установлены линзы с разным фокусным расстоянием, тепловизионный модуль, выполненный в виде тепловизионной радиометрической камеры, подключенной к модулю управления подвесом, и механизм стабилизации, включающий электронную схему стабилизации, которой снабжен модуль управления подвесом, и бесколлекторные моторы по количеству осей стабилизации.
3. Устройство видеонаблюдения беспилотного воздушного судна по п.1, отличающееся тем, что механизм стабилизации узла видеокамеры реализован следующим образом: электронная схема стабилизации модуля управления подвесом включает контроллер управления, инерциальную систему и драйвера моторов, имеющих обратную связь с бесколлекторными моторами посредством датчиков определения положения, основанных на эффекте Холла.
4. Устройство видеонаблюдения беспилотного воздушного судна по п.1, отличающееся тем, что набор микрокоаксиальных кабелей и гибкого соединительного шлейфа для взаимодействия процессорного модуля обработки видеоизображений и узла видеокамеры включают интерфейс USB для передачи сигнала от тепловизионного модуля, интерфейс MIPI CSI для передачи сигнала от сенсоров модуля видимого спектра, интерфейс I2C для управления сенсорами и CAN интерфейс для управления узлом видеокамеры.
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Способ изготовления металлической губки | 1928 |
|
SU14620A1 |
| RU 198460 U1, 10.07.2020 | |||
| CN 108058838 A, 22.05.2018 | |||
| CN 206155807 U, 10.05.2017 | |||
| US 20150207964 A1, 23.07.2015. | |||
