FIELD: physics.
SUBSTANCE: invention relates to the field of navigational instrument-making and can be used in systems for self-contained navigation of space objects: carrier rockets, booster rockets and spacecraft using a platform inertial navigation system, the main element of the inertial measuring unit of which is a triaxial gyro-stabilized platform (GSP). For this purpose, in addition, components of the angular speed vector of the object  are periodically measured using angular velocity sensors, the absolute value of the measured rotation angle of the gyro-stabilized platform is periodically compared in the axis of rotation of its intermediate frame |ψ| with maximum permissible value corresponding to "folding" of GPS frames, and in case of value |ψ| maximum allowable value at time t1, starting from this point in time, system of kinematic equations of angular motion of object
are periodically measured using angular velocity sensors, the absolute value of the measured rotation angle of the gyro-stabilized platform is periodically compared in the axis of rotation of its intermediate frame |ψ| with maximum permissible value corresponding to "folding" of GPS frames, and in case of value |ψ| maximum allowable value at time t1, starting from this point in time, system of kinematic equations of angular motion of object
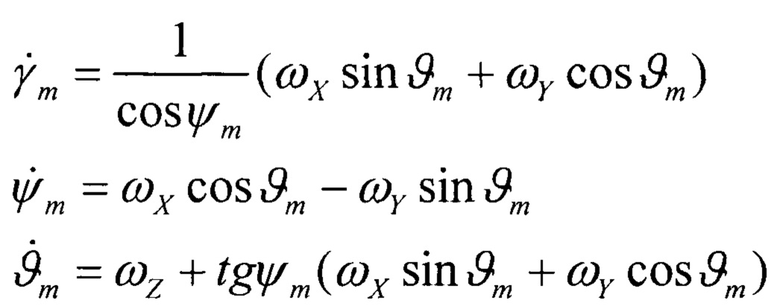
is numerically integrated with initial conditions
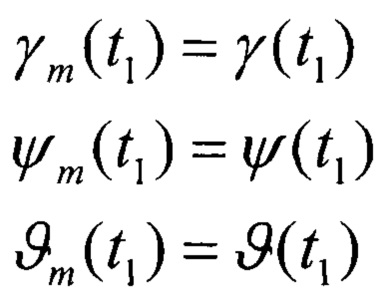 ,
,
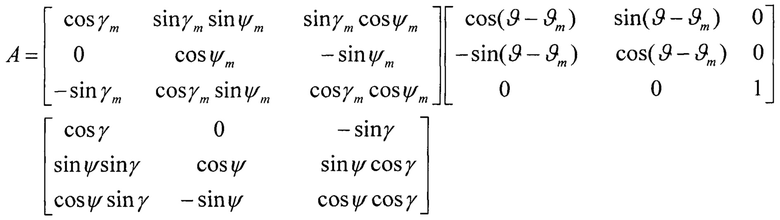
and full acceleration vector is calculated by formula 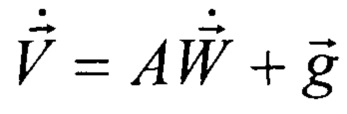 , where
, where
 ,
,
 is apparent acceleration vector,
is apparent acceleration vector,  is gravitational acceleration vector, γ(t1) and γm(t1) Is the measured and "model" angles of rotation of the GSP inner frame (frame) type internal frame, with accelerometers installed on it relative to the GSP intermediate frame plane, ψ(t1) and ψm(t1) is the measured and "model" angles between the intermediate GSP frame and the normal to the outer frame of the GPS, ϑ(t1) and ϑm(t1) Is the measured and "model" angles between the plane of the outer frame of the GPS and the longitudinal axis of the object, t1 Is the moment of time, when the absolute value of the measured angle ψ(t1) will reach value ψmax, which corresponds to the phenomenon of "folding" frames of GSP. As a result, expansion of functional capabilities is achieved based on increasing probability of successful completion of flight in case of emergency situation such as "addition of frames" of GSP (when the absolute value of angle ψ between the intermediate frame and the normal to the external frame of the GSP maximum permissible value) due to action of non-standard disturbances.
is gravitational acceleration vector, γ(t1) and γm(t1) Is the measured and "model" angles of rotation of the GSP inner frame (frame) type internal frame, with accelerometers installed on it relative to the GSP intermediate frame plane, ψ(t1) and ψm(t1) is the measured and "model" angles between the intermediate GSP frame and the normal to the outer frame of the GPS, ϑ(t1) and ϑm(t1) Is the measured and "model" angles between the plane of the outer frame of the GPS and the longitudinal axis of the object, t1 Is the moment of time, when the absolute value of the measured angle ψ(t1) will reach value ψmax, which corresponds to the phenomenon of "folding" frames of GSP. As a result, expansion of functional capabilities is achieved based on increasing probability of successful completion of flight in case of emergency situation such as "addition of frames" of GSP (when the absolute value of angle ψ between the intermediate frame and the normal to the external frame of the GSP maximum permissible value) due to action of non-standard disturbances.
EFFECT: broader functional capabilities.
1 cl, 2 dwg
| Title | Year | Author | Number |
|---|---|---|---|
| METHOD OF PLACING CLUSTER SPACE ROCKET IN ORBIT AT FLIGHT LEG BEFORE SEPARATION OF SIDE BLOCKS | 2011 |
|
RU2481247C1 |
| METHOD FOR CALIBRATING PARAMETERS OF PLATFORM-LESS INERTIAL MEASURING MODULE | 2004 |
|
RU2269813C2 |
| METHOD OF ONBOARD CONTROL IN ROCKET FLIGHT EMERGENT TERMINATION | 2011 |
|
RU2476357C2 |
| METHOD OF INCREASING GUIDANCE ACCURACY OF DEVELOPMENT STEPS FOR VARIOUS PURPOSES | 2010 |
|
RU2440557C9 |
| AUTONOMOUS COMPLEX FOR CORRECTION OF INERTIAL SYSTEMS OF PLATFORM ORIENTATION AND NAVIGATION OF MOBILE OBJECTS | 2022 |
|
RU2826826C2 |
| DEVICE FOR MEASURING KINEMATIC MOVEMENT CHARACTERISTICS | 1997 |
|
RU2117300C1 |
| ACCELERATION VECTOR MEASURING SYSTEM | 1995 |
|
RU2079143C1 |
| METHOD OF CONTROL OF GYRO-STABILISED PLATFORM | 2011 |
|
RU2491508C1 |
| COMBINED SYSTEM OF ORIENTATION AND NAVIGATION OF MOVING OBJECT | 2020 |
|
RU2746236C1 |
| PROCESS OF CALIBRATION OF GYROSCOPIC MEASURING DEVICES OF ANGULAR VELOCITY | 1999 |
|
RU2156959C1 |

