ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В некоторых обстоятельствах эндоскопические хирургические инструменты могут быть предпочтительнее традиционных хирургических устройств для проведения открытых операций, поскольку при разрезе меньшего размера обычно сокращается восстановительный период после оперативного вмешательства и снижается риск развития осложнений. Следовательно, некоторые эндоскопические хирургические инструменты могут быть приемлемы для введения дистального концевого эффектора в требуемое хирургическое поле через канюлю троакара. Для достижения диагностического или терапевтического эффекта эти дистальные концевые эффекторы (например, эндокатер, зажим, резак, сшивающий инструмент, клипсонакладыватель, устройство доступа, устройство для доставки лекарственных средств/генной терапии и устройство доставки энергии с помощью ультразвуковой вибрации, радиочастот (РЧ), лазера и т. д.) могут взаимодействовать с тканью рядом способов. Эндоскопические хирургические инструменты могут содержать ствол между концевым эффектором и участком рукоятки, манипуляции с которым осуществляет врач. Такой ствол может делать возможным введение на заданную глубину и вращение вокруг продольной оси ствола, таким образом облегчая расположение концевого эффектора внутри организма пациента. Размещение концевого эффектора может дополнительно облегчаться посредством включения одного или более шарнирных сочленений или элементов, позволяющих концевому эффектору избирательно шарнирно поворачиваться или иным способом отклоняться относительно продольной оси ствола.
Примеры эндоскопических хирургических инструментов включают в себя хирургические сшивающие инструменты. Некоторые из таких сшивающих инструментов выполнены с возможностью зажатия слоев ткани, разрезания зажатых слоев ткани и прошивания слоев ткани скобами, чтобы по существу скрепить рассеченные слои ткани вместе рядом с рассеченными концами слоев ткани. Исключительно в качестве примеров приведены хирургические сшивающие инструменты, раскрываемые в патенте США № 4,805,823, озаглавленном «Pocket Configuration for Internal Organ Staplers», выданном 21 февраля 1989 г.; патенте США № 5,415,334, озаглавленном «Surgical Stapler and Staple Cartridge», выданном 16 мая 1995 г.; патенте США № 5,465,895, озаглавленном «Surgical Stapler Instrument», выданном 14 ноября 1995 г.; патенте США № 5,597,107, озаглавленном «Surgical Stapler Instrument», выданном 28 января 1997 г.; патенте США № 5,632,432, озаглавленном «Surgical Instrument», выданном 27 мая 1997 г.; патенте США № 5,673,840, озаглавленном «Surgical Instrument», выданном 7 октября 1997 г.; патенте США № 5,704,534, озаглавленном «Articulation Assembly for Surgical Instruments», выданном 6 января 1998 г.; патенте США № 5,814,055, озаглавленном «Surgical Clamping Mechanism», выданном 29 сентября 1998 г.; патенте США № 6,978,921, озаглавленном «Surgical Stapling Instrument Incorporating an E-Beam Firing Mechanism», выданном 27 декабря 2005 г.; патенте США № 7,000,818, озаглавленном «Surgical Stapling Instrument Having Separate Distinct Closing and Firing Systems», выданном 21 февраля 2006 г.; патенте США № 7,143,923, озаглавленном «Surgical Stapling Instrument Having a Firing Lockout for an Unclosed Anvil», выданном 5 декабря 2006 г.; патенте США № 7,303,108, озаглавленном «Surgical Stapling Instrument Incorporating a Multi-Stroke Firing Mechanism with a Flexible Rack», выданном 4 декабря 2007 г.; патенте США № 7,367,485, озаглавленном «Surgical Stapling Instrument Incorporating a Multistroke Firing Mechanism Having a Rotary Transmission», выданном 6 мая 2008 г.; патенте США № 7,380,695, озаглавленном «Surgical Stapling Instrument Having a Single Lockout Mechanism for Prevention of Firing», выданном 3 июня 2008 г.; патенте США № 7,380,696, озаглавленном «Articulating Surgical Stapling Instrument Incorporating a Two-Piece E-Beam Firing Mechanism», выданном 3 июня 2008 г.; патенте США № 7,404,508, озаглавленном «Surgical Stapling and Cutting Device», выданном 29 июля 2008 г.; патенте США № 7,434,715, озаглавленном «Surgical Stapling Instrument Having Multistroke Firing with Opening Lockout», выданном 14 октября 2008 г.; патенте США № 7,721,930, озаглавленном «Disposable Cartridge with Adhesive for Use with a Stapling Device», выданном 25 мая 2010 г.; патенте США № 8,408,439, озаглавленном «Surgical Stapling Instrument with An Articulatable End Effector», выданном 2 апреля 2013 г.; и патенте США № 8,453,914, озаглавленном «Motor-Driven Surgical Cutting Instrument with Electric Actuator Directional Control Assembly», выданном 4 июня 2013 г. Описание каждого из процитированных выше патентов США включено в настоящий документ путем ссылки.
Несмотря на то, что упомянутые выше хирургические сшивающие инструменты описаны в связи с применением во время эндоскопических процедур, следует понимать, что такие хирургические сшивающие инструменты также можно применять во время открытых вмешательств и/или других неэндоскопических процедур. Исключительно для примера при торакальном хирургическом вмешательстве, во время которого для создания прохода для сшивающего инструмента не применяют троакар, хирургический сшивающий инструмент может быть введен посредством торакотомии и, таким образом, между ребрами пациента для получения доступа к одному или более органам. Такие вмешательства могут включать в себя применение сшивающего инструмента для рассечения и закрытия сосуда, ведущего к легкому. Например, сосуды, ведущие к органу, можно рассечь и закрыть с помощью сшивающего инструмента перед удалением органа из грудной полости. Безусловно, хирургические сшивающие инструменты можно применять в различных других обстоятельствах и процедурах.
Примеры хирургических сшивающих инструментов, которые могут прежде всего предназначаться или применяться при торакальном хирургическом вмешательстве, описаны в публикации заявки на патент США № 2014/0243801, озаглавленной «Surgical Instrument End Effector Articulation Drive with Pinion and Opposing Racks», опубликованной 28 августа 2014 г.; публикации заявки на патент США № 2014/0239041, озаглавленной «Lockout Feature for Movable Cutting Member of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации заявки на патент США № 2014/0239042, озаглавленной «Integrated Tissue Positioning and Jaw Alignment Features for Surgical Stapler», опубликованной 28 августа 2014 г.; публикации заявки на патент США № 2014/0239036, озаглавленной «Jaw Closure Feature for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации заявки на патент США № 2014/0239040, озаглавленной «Surgical Instrument with Articulation Lock having a Detenting Binary Spring», опубликованной 24 августа 2014 г.; публикации заявки на патент США № 2014/0239043, озаглавленной «Distal Tip Features for End Effector of Surgical Instrument», опубликованной 28 августа 2014 г.; публикации заявки на патент США № 20140239037, озаглавленной «Staple Forming Features for Surgical Stapling Instrument», поданной 28 августа 2014 г.; публикации заявки на патент США № 2014/0239038, озаглавленной «Surgical Instrument with Multi-Diameter Shaft», опубликованной 28 августа 2014 г.; и публикации заявки на патент США № 2014/0239044, озаглавленной «Installation Features for Surgical Instrument End Effector Cartridge», опубликованной 28 августа 2014 г. Описание каждой из процитированных выше патентных заявок США включено в настоящий документ путем ссылки.
Несмотря на то, что некоторые хирургические инструменты и системы изготавливаются и применяются, считается, что никто до авторов изобретения не создавал или не применял настоящее изобретение, описанное в приложенных пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Хотя описание ограничивается формулой изобретения, которая подробно показывает и четко заявляет права на эту технологию, считается, что лучшему пониманию данной технологии послужит следующее описание некоторых примеров в сочетании с сопровождающими описанными ниже рисунками, на которых похожие числовые обозначения идентифицируют одинаковые элементы.
На ФИГ. 1 представлен вид в перспективе примера хирургического инструмента, включающего в себя сменный узел ствола и узел рукоятки;
на ФИГ. 2 представлен вид в перспективе инструмента, изображенного на ФИГ. 1, на котором показан узел ствола, демонтированный с узла рукоятки инструмента;
на ФИГ. 3 представлен частичный вид в перспективе инструмента, изображенного на ФИГ. 1, на котором показан узел ствола, демонтированный с узла рукоятки инструмента;
на ФИГ. 4A представлен вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 1, выполненный вдоль линии 4-4, изображенной на ФИГ. 1, с узлом ствола, функционально соединенным с узлом рукоятки;
на ФИГ. 4B представлен вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 1, выполненный вдоль линии 4-4, изображенной на ФИГ. 1, с узлом ствола на начальном этапе функционального отсоединения от узла рукоятки;
на ФИГ. 5A представлен вид в перспективе инструмента, изображенного на ФИГ. 1, в котором часть корпуса удалена для демонстрации узла ствола, функционально соединенного с узлом рукоятки;
на ФИГ. 5B представлен вид в перспективе инструмента, изображенного на ФИГ. 1, в котором часть корпуса удалена для демонстрации узла ствола на начальном этапе функционального отсоединения от узла рукоятки;
на ФИГ. 6 представлен вид в перспективе другого примера хирургического сшивающего инструмента;
на ФИГ. 7A представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 6, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола функционально соединен с узлом рукоятки;
на ФИГ. 7B представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 6, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола находится на первом этапе отсоединения от узла рукоятки;
на ФИГ. 7C представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 6, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола находится на втором этапе отсоединения от узла рукоятки;
на ФИГ. 8A представлен увеличенный вид сзади в перспективе другого примера хирургического сшивающего инструмента, в котором узел ствола функционально соединен с узлом рукоятки;
на ФИГ. 8B представлен увеличенный вид сзади в перспективе инструмента, изображенного на ФИГ. 8A, в котором узел ствола находится на первом этапе отсоединения от узла рукоятки;
на ФИГ. 8C представлен увеличенный вид сзади в перспективе инструмента, изображенного на ФИГ. 8A, в котором узел ствола находится на втором этапе отсоединения от узла рукоятки;
на ФИГ. 9 показан вид в перспективе с пространственным разделением компонентов части системы фиксации инструмента, изображенного на ФИГ. 8A;
на ФИГ. 10A представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 8A, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола функционально соединен с узлом рукоятки;
на ФИГ. 10B представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 8A, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола находится на первом этапе отсоединения от узла рукоятки;
на ФИГ. 1C представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 8A, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола находится на втором этапе отсоединения от узла рукоятки;
на ФИГ. 11A представлен увеличенный вид сзади в перспективе другого примера хирургического сшивающего инструмента, в котором узел ствола функционально соединен с узлом рукоятки;
на ФИГ. 11B представлен увеличенный вид сзади в перспективе инструмента, изображенного на ФИГ. 11A, в котором узел ствола находится на начальном этапе отсоединения от узла рукоятки;
на ФИГ. 12A представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 11A, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола функционально соединен с рукояткой;
на ФИГ. 12B представлен увеличенный вид сбоку в поперечном сечении инструмента, изображенного на ФИГ. 11A, в целом выполненный вдоль центральной линии узла ствола, причем узел ствола находится на начальном этапе отсоединения от узла рукоятки;
на ФИГ. 13 представлена блок-схема примера хирургического сшивающего инструмента с программируемой пользователем вентильной матрицей, выполненной с возможностью приема базовой логической схемы из флэш-памяти при функциональном соединении узла ствола с узлом рукоятки;
на ФИГ. 14 представлен вид сверху в перспективе узла рукоятки инструмента, изображенного на ФИГ. 13;
на ФИГ. 15 представлен увеличенный вид в перспективе с частичным пространственным разделением компонентов другого примера хирургического сшивающего инструмента с узлом ствола, который включает в себя механизм сдвига;
на ФИГ. 16 представлен вид в перспективе с пространственным разделением компонентов узла ствола, изображенного на ФИГ. 15;
на ФИГ. 17 представлен увеличенный вид в перспективе с пространственным разделением компонентов узла ствола, изображенного на ФИГ. 16, в первом состоянии сборки;
на ФИГ. 18 представлен увеличенный вид в перспективе с частичным пространственным разделением компонентов узла ствола, изображенного на ФИГ. 17, во втором состоянии сборки;
на ФИГ. 19 представлен увеличенный вид в перспективе с частичным пространственным разделением компонентов узла ствола, изображенного на ФИГ. 17, в третьем состоянии сборки;
на ФИГ. 20A представлен увеличенный вид сверху в перспективе узла ствола, изображенного на ФИГ. 16, с механизмом сдвига в первом положении зацепления; и
на ФИГ. 20B представлен увеличенный вид сверху в перспективе узла ствола, изображенного на ФИГ. 16, с механизмом сдвига во втором положении зацепления.
Предполагается, что графические материалы не являются ограничивающими каким-либо образом, и считается, что различные варианты осуществления технологии можно реализовать множеством других способов, включая те, которые необязательно показаны на графических материалах. Прилагаемые рисунки, включенные в спецификацию и формирующие ее часть, иллюстрируют несколько аспектов данной технологии, и вместе с описанием служат для объяснения принципов технологии; при том понимается, что эта технология не ограничивается конкретными изображенными конструкциями.
ПОДРОБНОЕ ОПИСАНИЕ
Представленное ниже описание конкретных примеров технологии не следует применять для ограничения ее объема. Другие примеры, элементы, аспекты, варианты осуществления и преимущества технологии станут очевидны специалистам в данной области из представленного ниже описания, в котором в иллюстративных целях предложен один из лучших способов, предусмотренных для реализации технологии. Как станет понятно, технология, описанная в настоящем документе, может демонстрировать другие различные и очевидные аспекты, все из которых являются частью технологии. Соответственно, рисунки и описания следует рассматривать как по своей сути иллюстративные, а не ограничивающие.
Дополнительно следует понимать, что любой один или более элементов из идей, выражений, вариантов осуществления, примеров и т. п., описанных в настоящем документе, можно скомбинировать с любым одним или более элементами из других идей, выражений, вариантов осуществления, примеров и т. п., описанных в настоящем документе. Таким образом, не следует рассматривать описанные ниже идеи, выражения, варианты осуществления, примеры и т. п. по отдельности друг от друга. В свете идей, представленных в настоящем документе, обычным специалистам в данной области будут очевидны различные приемлемые способы, которыми можно комбинировать идеи настоящего документа. Предполагается, что такие модификации и вариации включены в объем формулы изобретения.
Для ясности описания термины «проксимальный» и «дистальный» определены в настоящем документе относительно оператора или другого оператора, удерживающего хирургический инструмент, имеющий дистальный хирургический концевой эффектор. Термин «проксимальный» относится к положению элемента ближе к оператору или другому оператору, а термин «дистальный» относится к положению элемента ближе к хирургическому концевому эффектору хирургического инструмента и дальше в сторону от оператора или другого оператора. Хотя описываемые в настоящем документе хирургические инструменты содержат приводные приспособления для разрезания и сшивания, будет понятно, что описанные в настоящем документе конструкции аккумуляторной батареи могут использоваться с любым видом хирургических электроинструментов, таких как, например, фрезы, зажимы, аппараты для сшивания, радиочастотные фрезы/коагуляторы, ультразвуковые фрезы/коагуляторы и лазерные фрезы/коагуляторы.
I. Обзор примера хирургического инструмента
На ФИГ. 1 представлен хирургический режущий и сшивающий инструмент (10) с приводом от двигателя с возможностью или без возможности многократного использования. В показанном варианте осуществления хирургический инструмент (10) включает в себя узел (11) рукоятки, имеющий корпус (12). По меньшей мере часть корпуса (12) образует рукоятку (14), которая выполнена с возможностью захвата, манипулирования и активирования врачом. Корпус (12) выполнен с возможностью функционального прикрепления к сменному узлу (16) ствола, на котором имеется хирургический концевой эффектор (18), который функционально соединен с ним и выполнен с возможностью осуществления одной или нескольких хирургических задач или процедур. Очевидно, что ряд уникальных и инновационных вариантов различных форм сменных узлов ствола, описанных в настоящем документе, также может эффективно применяться совместно с хирургическими системами с роботизированным управлением. Таким образом, термин «корпус» также может охватывать корпус или аналогичную часть роботизированной системы, которая вмещает или иным образом функционально поддерживает по меньшей мере одну приводную систему, выполненную с возможностью генерирования и применения по меньшей мере одного управляющего движения, которое может применяться для приведения в действие сменных узлов ствола, описанных в настоящем документе, и их соответствующих эквивалентов. Термин «рама» может относиться к части ручного хирургического инструмента. Термин «рама» также может представлять собой часть хирургического инструмента с роботизированным управлением и/или часть роботизированной системы, которая может применяться для функционального управления хирургическим инструментом. Например, сменные узлы ствола, описанные в настоящем документе, могут применяться с различными роботизированными системами, инструментами, компонентами и способами, раскрываемыми в патенте США № 9,072,535, озаглавленном «Surgical Stapling Instruments with Rotatable Staple Deployment Arrangements», выданном 7 июля 2015 г., описание которого включено в настоящий документ путем ссылки.
Узел (11) рукоятки показан в соединении со сменным узлом (16) ствола, который включает в себя концевой эффектор (18), содержащий хирургическое режущее и сшивающее устройство (10), которое выполнено с возможностью функциональной поддержки в нем хирургической кассеты (20) со скобами. Корпус (12) может быть выполнен с возможностью использования вместе со сменными узлами ствола, которые включают в себя концевые эффекторы, приспособленные для поддержки кассет со скобами различных размеров и типов, и при этом имеют разные значения длины, разные размеры, типы и др. параметры ствола. Кроме того, узел (11) рукоятки также можно эффективно применять с различными сменными узлами ствола, включая те узлы, которые выполнены с возможностью применения других движений и форм энергии, таких как, например, радиочастотная (РЧ) энергия, ультразвуковая энергия и/или движение, к конструкциям концевых эффекторов, которые адаптированы для использования при различных хирургических процедурах и оперативных вмешательствах. Более того, в концевых эффекторах, узлах ствола, рукоятках, хирургических инструментах и/или системах хирургических инструментов для фиксации ткани может использоваться любой подходящий крепежный элемент или крепежные элементы. Например, кассета с крепежными элементами, содержащая множество хранящиеся в ней с возможностью извлечения крепежных элементов, может съемно вводиться и/или прикрепляться к концевому эффектору узла стержня. Различные примеры таких кассет описаны в различных ссылках, приведенных в настоящем документе.
На ФИГ. 1 изображен хирургический инструмент (10) со сменным узлом (16) ствола, функционально соединенным с узлом (11) рукоятки. На ФИГ. 2-3 изображено крепление сменного узла (16) ствола к корпусу (12) рукоятки (14). Рукоятка (14) включает в себя пару взаимосоединяемых корпусных сегментов (22, 24) рукоятки, которые могут соединяться винтами, защелками, клеем и т. п. В изображенной конструкции корпусные сегменты (22, 24) рукоятки в совокупности образуют участок (26) пистолетной ручки, которую может захватывать рукой врач и манипулировать ею. Как будет более подробно описано ниже, рукоятка (14) функционально поддерживает множество приводных систем, выполненных с возможностью генерирования и применения различных управляющих движений к соответствующим участкам сменного узла (16) ствола, к которому эти системы функционально прикреплены.
Рукоятка (14) дополнительно включает в себя раму (28), функционально поддерживающую множество приводных систем. Например, рама (28) может функционально поддерживать «первую» систему, или систему закрывающего привода, по существу обозначенную как элемент (30), который может использоваться для приложения закрывающих и открывающих движений к сменному узлу (16) ствола, который функционально прикреплен к нему или соединен с ним. В одном примере система (30) закрывающего привода включает в себя исполнительный механизм в форме закрывающего спускового механизма (32), который поддерживается рамой (28) с возможностью поворота. Более конкретно, закрывающий спусковой механизм (32) соединен с возможностью поворота с корпусом (14) с помощью штифта (34) (см. ФИГ. 4A). Такая конструкция позволяет врачу управлять закрывающим спусковым механизмом (32), поэтому, когда врач захватывает участок (26) пистолетной ручки рукоятки (14), закрывающий спусковой механизм (32) можно легко повернуть из исходного, или «неактивированного», положения в направлении участка (26) пистолетной ручки в «активированное» положение, а, более конкретно, в полностью нажатое или полностью активированное положение. Закрывающий спусковой механизм (32) может быть смещен в неактивированное положение с помощью пружины или другого смещающего механизма (не показан). В различных примерах система (30) закрывающего привода дополнительно включает в себя узел (36) закрывающего звена, который соединен с закрывающим спусковым механизмом (32) с возможностью поворота. Узел (36) закрывающего звена может включать в себя первое закрывающее звено (не показано) и второе закрывающее звено (38), которые соединены с возможностью поворота с закрывающим спусковым механизмом (32) с помощью штифта (не показан). Второе закрывающее звено (38) в настоящем документе также может называться «крепежным элементом» и может включать в себя поперечный крепежный штифт (37).
Как показано на ФИГ. 1-3, первое закрывающее звено (не показано) выполнено с возможностью взаимодействия с узлом (44) высвобождения закрывающего механизма, соединенного с возможностью поворота с рамой (28). По меньшей мере в одном примере узел (44) высвобождения закрывающего механизма имеет узел (46) кнопки высвобождения, на котором выполнена выступающая в дистальном направлении блокирующая собачка (не показана). Узел (46) кнопки высвобождения может поворачиваться в направлении против часовой стрелки с помощью пружины высвобождения (не показана). Когда врач нажимает на закрывающий спусковой механизм (32) в его неактивированном положении в направлении участка пистолетной ручки (26) рукоятки (14), первое закрывающее звено (не показано) поворачивается вверх до точки, в которой блокирующая собачка (не показана) входит в удерживающее зацепление с первым закрывающим звеном (не показано), тем самым не позволяя закрывающему спусковому механизму (32) вернуться в неактивированное положение. Таким образом, узел (44) высвобождения закрывающего механизма служит для блокировки закрывающего спускового механизма (32) в полностью активированном положении. Когда врачу требуется разблокировать закрывающий спусковой механизм (32) из активированного положения для возврата в неактивированное положение, врач просто поворачивает узел кнопки высвобождения закрывающего механизма (46) таким образом, что блокирующая собачка (не показана) выходит из зацепления с первым закрывающим звеном (не показано). После выхода блокирующей собачки (не показана) из зацепления с первым закрывающим звеном (не показано), закрывающий спусковой механизм (32) может поворачиваться назад в неактивированное положение. Кроме того, возможна реализация других блокирующих и высвобождающих механизмов закрывающего спускового механизма.
Сменный узел (16) ствола включает в себя хирургический концевой эффектор (18), который содержит удлиненный канал (48), выполненный с возможностью функционально поддерживать в себе кассету (20) со скобами. Концевой эффектор (18) в настоящем примере дополнительно включает в себя упор (50), который поддерживается с возможностью поворота относительно удлиненного канала (48). Сменный узел (16) ствола дополнительно включает в себя шарнирное сочленение (52) и фиксирующий элемент шарнирного сочленения (не показан), который может быть выполнен с возможностью разъемного удержания концевого эффектора (18) в требуемом положении относительно продольной оси узла (16) ствола. Только в качестве примера, концевой эффектор (18), шарнирное сочленение (52) и фиксирующий элемент шарнирного сочленения (не показан) могут быть выполнены и функционировать в соответствии по меньшей мере с некоторыми идеями, изложенными в публикации США № 2014/0263541, озаглавленной «Articulatable Surgical Instrument Comprising an Articulation Lock», опубликованной 18 сентября 2014 г. В альтернативном варианте концевой эффектор (18), шарнирное сочленение (52) и фиксирующий элемент шарнирного сочленения (не показан) могут быть выполнены и функционировать в соответствии по меньшей мере с некоторыми идеями, приведенными в настоящем документе путем другой ссылки (других ссылок); или может быть выполнен и может применяться любым другим подходящим образом.
Сменный узел (16) ствола дополнительно включает в себя проксимальный корпус, или мундштук, (54), состоящий из участков (56, 58) мундштука. Сменный узел (16) ствола дополнительно включает в себя закрывающую трубку (60), которую можно использовать для закрытия и/или открытия упора (50) концевого эффектора (18). Узел (16) ствола также включает в себя закрывающий челнок (62), который поддерживается с возможностью скольжения в шасси (64) таким образом, что он может перемещаться относительно него по оси. Закрывающий челнок (62) включает в себя пару проксимально выступающих крюков (66), выполненных с возможностью крепления к крепежному штифту (42), прикрепленному ко второму закрывающему звену (38). Проксимальный конец (68) (см. ФИГ. 5A) закрывающей трубки (60) соединен с закрывающим челноком (62), чтобы поворачиваться относительно него. Закрывающая пружина (не показана) опирается на закрывающую трубку (60) и служит для смещения закрывающей трубки (60) в проксимальном направлении (PD), что может служить для поворота закрывающего спускового механизма (32) в неактивированное положение, когда узел (16) ствола функционально соединен с рукояткой (14). Дополнительная информация, касающаяся одной или нескольких особенностей альтернативных узлов ствола, будет представлена ниже более подробно.
В настоящем примере шарнирное сочленение (52) включает в себя узел (70) двухшарнирной закрывающей гильзы. Узел (70) двухшарнирной закрывающей гильзы включает в себя узел (72) закрывающей гильзы концевого эффектора для зацепления с открывающим язычком на упоре (50) различными способами, описанными в публикации США № 2014/0263541, описание которой включено в настоящий документ путем ссылки. Хотя узел (16) ствола настоящего примера включает в себя шарнирное сочленение (52), другие сменные узлы ствола могут не иметь функций шарнирного сочленения.
Как показано на ФИГ. 3-4B, шасси (64) включает в себя пару выполненных на нем конических соединительных участков (74), которые приспособлены для размещения внутри соответствующих пазов (76) типа «ласточкин хвост», образованных внутри дистального участка (78) соединительного фланца рамы (28). Каждый паз (76) типа «ласточкин хвост» может быть коническим или, как правило, V-образным, для размещения в себе соединительных участков (74). Ушко (80) крепления ствола образовано на проксимальном конце промежуточного пускового ствола (82). Таким образом, когда сменный узел (16) ствола соединяется с рукояткой (14), ушко (80) крепления ствола размещено в ложе (84) для крепления пускового ствола, образованном на дистальном конце продольного приводного элемента (86).
Один пример узла (16) ствола включает в себя систему (88) фиксации для разъемного соединения узла (16) ствола с узлом (11) рукоятки и, более конкретно, с рамой (28). Как показано на ФИГ. 4A-5B, например, система (88) фиксации включает в себя блокирующий элемент, или блокирующую вилку, (90), которая подвижно соединена с шасси (64). В показанном примере блокирующая вилка (90) имеет U-образную форму с двумя находящимися на некотором расстоянии ножками (92), направленными вниз. На каждой из ножек (92) имеется выполненное на ней поворотное ушко (94), которое приспособлено для размещения в соответствующих отверстиях (не показаны), выполненных в шасси (64). Такая конструкция обеспечивает поворотное крепление блокирующей вилки (90) к шасси (64). Блокирующая вилка (90) включает в себя два проксимально выступающих блокирующих ушка (96), которые выполнены с возможностью разъемного зацепления с соответствующими блокирующими выемками, или канавками (98), на дистальном участке (78) соединительного фланца рамы (28) (см. ФИГ. 3). В различных формах блокирующая вилка (90) выполнена с возможностью смещения в проксимальном направлении пружиной (91) или другим смещающим элементом (например, как показано на ФИГ. 7A-7C, 10A-1C и 12A-12B, которые более подробно описаны ниже). Блокирующая вилка (90) может приводиться в действие с помощью кнопки (100) фиксации, которая установлена с возможностью скольжения на узле (102) исполнительного механизма фиксации, который установлен на шасси (64). Кнопка (100) фиксации может быть смещена в проксимальном направлении относительно блокирующей вилки (90). Как будет более подробно описано ниже, блокирующая вилка (90) может перемещаться в разблокированное положение путем принудительного перемещения кнопки (100) фиксации в дистальном направлении, что также приводит к выходу за счет поворота блокирующей вилки (90) из удерживающего зацепления с дистальным участком (78) соединительного фланца рамы (28). Когда блокирующая вилка (90) находится в «удерживающем зацеплении» с дистальным участком (78) соединительного фланца рамы (28), блокирующие ушки (96) зафиксированы в соответствующих блокирующих выемках, или канавках (98) на дистальном участке (78) соединительного фланца.
При использовании сменного узла ствола, который включает в себя концевой эффектор описанного здесь типа, который приспособлен для разрезания и фиксации ткани, а также других типов концевых эффекторов, может оказаться целесообразным предотвратить непреднамеренное отсоединение сменного узла (16) ствола от узла (11) рукоятки во время приведения в действие концевого эффектора (18). Например, в процессе применения врач может приводить в действие закрывающий спусковой механизм (32) для захвата и перемещения в требуемое положение целевой ткани. После того, как целевая ткань будет размещена в концевом эффекторе (18) в требуемой ориентации, врач может полностью привести в действие закрывающий спусковой механизм (32), чтобы закрыть упор (50) и зажать целевую ткань в положении для разрезания и наложения скоб. В этом случае система (30) закрывающего привода полностью приведена в действие. После того как целевая ткань будет зажата в концевом эффекторе (18), может оказаться целесообразным предотвратить непреднамеренное отсоединение узла (16) ствола от узла (11) рукоятки.
В связи с этим на ФИГ. 5A-5B показана блокирующая вилка (90), которая включает в себя пару блокирующих крюков (104), приспособленных для вхождения в контакт с соответствующими блокирующими ушками (96), выполненными на закрывающем челноке (62). Как показано на ФИГ. 3 и 5A-5B, когда закрывающий челнок (62) находится в неактивированном положении (т. е. первая приводная система (30) не активирована, а упор (50) открыт), блокирующая вилка (90) может поворачиваться в дистальном направлении для разблокирования сменного узла (16) ствола от узла (11) рукоятки. В этом положении блокирующие крюки (104) не контактируют с блокирующими ушками (96) на закрывающем челноке (62). Однако когда закрывающий челнок (62) перемещается в активированное положение (т. е. первая приводная система (30) активирована и упор (50) находится в закрытом положении), блокирующая вилка (90) не имеет возможности поворачиваться в разблокированное положение. Иными словами, если врач попытается повернуть блокирующую вилку (90) в разблокированное положение или, например, блокирующая вилка (90) будет случайно подвержена удару или задета таким образом, что в других обстоятельствах это могло бы привести к ее дистальному повороту, блокирующие крюки (104) на блокирующей вилке (90) войдут в контакт с блокирующими ушками (96) на закрывающем челноке (62) и предотвратят перемещение блокирующей вилки (90) в разблокированное положение.
Прикрепление сменного узла (16) ствола к рукоятке (14) далее будет описано со ссылкой на ФИГ. 3-5B. Чтобы приступить к процессу соединения, врач может расположить шасси (64) сменного узла (16) ствола поверх дистального участка (78) соединительного фланца рамы (28) или смежно с ним таким образом, чтобы конические соединительные участки (74), выполненные на шасси (64), были совмещены с пазами (76) типа «ласточкин хвост» на раме (28). Затем врач может переместить узел (16) ствола вдоль оси установки (IA), которая расположена перпендикулярно продольной оси узла (16) ствола, чтобы установить соединительные участки (74) в «функциональное зацепление» с соответствующими приемными пазами (76) типа «ласточкин хвост». Таким образом, ушко (80) крепления ствола на промежуточном пусковом стволе (82) также будет установлено в ложе (84) на выполненном с возможностью продольного перемещения приводном элементе (86), а участки штифта (42) на втором закрывающем звене (38) будут установлены в соответствующие крюки (66) на закрывающем челноке (62). При использовании в настоящем документе термин «функциональное зацепление» применительно к двум компонентам означает, что два компонента находятся в достаточном зацеплении друг с другом, чтобы после приложения к ним активирующего движения компоненты могли выполнять назначенное действие, функцию и/или операцию.
Как отмечалось выше, по меньшей мере пять систем сменных узлов (16) ствола могут функционально соединяться по меньшей мере с пятью соответствующими системами рукоятки (14). Первая система содержит систему рамы, которая соединяет и/или совмещает раму или цапфу узла (16) ствола с рамой (28) рукоятки (14). Вторая система представляет собой систему (30) закрывающего привода, которая может функционально соединять закрывающий спусковой механизм (32) рукоятки (14) и закрывающую трубку (60) с упором (50) узла (16) ствола. Как кратко описано выше, закрывающий челнок (62) узла (16) ствола зацепляется со штифтом (42) на втором закрывающем звене (38). Третья система является системой пускового привода, которая функционально соединяет пусковой механизм рукоятки (14) с промежуточным пусковым стволом (82) узла (16) ствола. Как кратко описано выше, ушко (80) крепления ствола функционально соединяется с ложем (84) продольного приводного элемента (86). Четвертая система представляет собой электрическую систему, которая может подавать сигнал в контроллер рукоятки (14), такой как микроконтроллер, чтобы узел (16) ствола был функционально зацеплен с рукояткой (14) для подачи питания и/или передачи сигналов связи между узлом (16) ствола и рукояткой (14). Например, узел (16) ствола может включать в себя электрический соединитель (106), который функционально установлен на печатной плате ствола (не показана). Электрический соединитель (106) выполнен с возможностью парного зацепления с соответствующим электрическим соединителем (108) на плате управления рукояткой (не показана). Более подробная информация, касающаяся электросхем и систем управления, приведена в публикации США № 2014/0263541, описание которой включено в настоящий документ путем ссылки. Пятая система является системой (88) фиксации для разъемной блокировки узла (16) ствола на рукоятке (14).
В различных узлах (16) ствола, описанных в настоящем документе, могут применяться датчики и другие различные компоненты, для которых требуется электрическая связь с контроллером корпуса (12). Эти узлы (16) ствола, как правило, выполнены с возможностью поворота относительно корпуса, что приводит к необходимости соединения, обеспечивающего такую электрическую связь между двумя или несколькими компонентами, которые могут поворачиваться относительно друг друга. При использовании концевых эффекторов типов, описанных в настоящем документе, конструкции соединителей должны отличаться относительной прочностью, и в то же время быть достаточно компактными, чтобы входить в соединительный участок узла ствола. В дополнение к вышеупомянутому, инструмент (10) может быть сконструирован и выполнен с возможностью эксплуатации в соответствии по меньшей мере с некоторыми из идей, изложенных в заявке на патент США № 14/226,142, озаглавленной «Surgical Instrument Comprising a Sensor System», поданной 26 марта 2014 г., описание которой включено в настоящий документ путем ссылки. В качестве дополнения или альтернативы инструмент (10) может быть сконструирован и функционировать в соответствии по меньшей мере с некоторыми из идей, описанных в любом из различных документов, включенных в настоящий документ путем ссылки.
II. Хирургический инструмент с системой фиксации с выталкиванием
Хотя вышеописанный хирургический инструмент (10) предусматривает сменный узел (16) ствола, следует понимать, что узел (16) ствола соединяется и отсоединяется путем перемещения вдоль оси установки (IA). Таким образом, оператор может не запомнить направление извлечения узла (16) ствола из узла (11) рукоятки и непреднамеренно попытаться извлечь узел (16) ствола в другом, неправильном, направлении (например, вытягивая узел (16) ствола вдоль продольной оси узла (16) ствола). В лучшем случае эта попытка извлечения пасту к непроизводительным затратам времени и нарушению хода хирургической операции, что особенно критично при проведении сложных и ограниченных по времени хирургических вмешательств. В худшем случае оператор может непреднамеренно повредить хирургический инструмент (10) в процессе или по окончании неправильного извлечения. Следовательно, желательно предоставить хирургический инструмент (210), имеющий систему (288) фиксации с выталкиванием, выполненную с возможностью по меньшей мере частичного извлечения узла (16) ствола из узла (11) рукоятки для более простого указания оператору направления извлечения узла (16) ствола. Следует понимать, что изложенные ниже элементы могут быть легко встроены в хирургический инструмент (10), описанный выше. С этой целью схожие числовые обозначения указывают на схожие элементы, подробно описанные выше.
На ФИГ. 6-7C показан пример хирургического инструмента (210), который включает в себя узел (11) рукоятки, узел (16) ствола и систему (288) фиксации с выталкиванием, выполненную с возможностью указания направления извлечения вдоль оси установки (IA) (см. ФИГ. 2). Система (288) фиксации включает в себя узел (302) исполнительного механизма фиксации, который имеет фиксирующий элемент в форме кнопки (300) фиксации и узел (310) крепления фиксатора. Узел (310) крепления фиксатора выполнен с возможностью поддержки кнопки (300) фиксации со скольжением во время передвижения оператором кнопки (300) фиксации между заблокированным положением, разомкнутым положением и положением для извлечения, как, соответственно, показано на ФИГ. 7A-7C. Таким образом, оператор передвигает кнопку (300) фиксации в дистальном направлении из заблокированного положения в разомкнутое положение, чтобы функционально отсоединить узел (16) ствола от узла (11) рукоятки. Затем оператор дополнительно перемещает кнопку (300) фиксации в дистальном направлении из разомкнутого положения в положение для извлечения, чтобы принудительно переместить узел (16) ствола в направлении извлечения относительно узла (16) ствола. Хотя подробное описание заблокированного положения, разомкнутого положения и положения для извлечения приведено далее в качестве отдельных положений, следует понимать, что оператор может плавно перемещать кнопку (300) фиксации из заблокированного положения в разомкнутое положение и извлекать узел (16) ствола единым общим движением; или с помощью отдельных манипуляций по желанию оператора.
Как показано на ФИГ 7A, система (288) фиксации дополнительно содержит блокирующий элемент рукоятки в форме дистального участка (78) соединительного фланца и блокирующий элемент ствола в форме блокирующей вилки (90). Как описано выше, блокирующая вилка (90) соединена с возможностью перемещения с шасси (64) на проксимальном концевом участке (312) узла (16) ствола и выполнена с возможностью смещения проксимально к дистальному участку (78) соединительного фланца. После функционального соединения узла (16) ствола с узлом (11) рукоятки поворотные ушки (94) скользят по дистальному участку (78) соединительного фланца и поворачивают блокирующую вилку (90) вокруг дистального участка (78) соединительного фланца до тех пор, пока в канавки (98) не войдут поворотные ушки (94). Дистальный участок (78) соединительного фланца и блокирующая вилка (90) таким образом, препятствуют извлечению узла (16) ствола до тех пор, пока оператор не будет управлять кнопкой (300) фиксации.
С этой целью кнопка (300) фиксации включает в себя верхнюю поверхность (314) захвата и дистальный выступ (316) для поворота блокирующей вилки (90) и высвобождения поворотных ушек (94) из канавок (98). Верхняя поверхность (314) захвата текстурирована таким образом, чтобы обеспечить поверхность, с помощью которой оператор может эффективно захватывать кнопку (300) фиксации. Дистальный выступ (316) выступает в дистальном направлении от верхней поверхности (314) захвата и проходит до блокирующей вилки (90). Кнопка (300) фиксации дополнительно включает в себя кулачковую поверхность (318) с понижающимся уклоном, выполненную с возможностью зацепления и скольжения вдоль кулачкового основания (320), жестко прикрепленного к узлу (11) рукоятки.
Узел (310) крепления фиксатора выполнен с возможностью обеспечения продольного скольжения кнопки (300) фиксации относительно кулачкового основания (320) и вплотную к нему. В настоящем примере узел (310) крепления фиксатора имеет пару противоположных продольных фиксирующих пазов (322), в которых размещаются с возможностью скольжения противоположные концы кнопки (300) фиксации. Узел (310) крепления фиксатора также включает в себя отверстие (324), расположенное таким образом, что кулачковая поверхность (318) с понижающимся уклоном контактирует с кулачковым основанием (320). Таким образом, зацепление между кулачковой поверхностью (318) с понижающимся уклоном и кулачковым основанием (320) обеспечивает поперечное перемещение кнопки (300) фиксации, тогда как кнопка (300) фиксации выполнена с возможностью продольного скольжения внутри каждого продольного фиксирующего паза (322) в узле (310) крепления фиксатора.
На ФИГ. 7A показан узел (16) ствола в процессе применения, функционально соединенный с узлом (11) рукоятки и кнопкой (300) фиксации в заблокированном положении. С целью отсоединения узла ствола и узла рукоятки (16, 11), оператор захватывает верхнюю поверхность (314) захвата большим или другим пальцем руки и передвигает кнопку (300) фиксации в дистальном направлении в направлении разомкнутого положения. В свою очередь, дистальный выступ (316) зацепляет блокирующую вилку (90) и поворачивает блокирующую вилку (90) в дистальном направлении для высвобождения поворотных ушек (94). На ФИГ. 7B показаны функционально отсоединенные узлы ствола и рукоятки (16, 11) с кнопкой (300) фиксации в разомкнутом положении.
В настоящем примере узел (16) ствола можно извлечь вдоль оси установки (IA) (см. ФИГ. 2) из разомкнутого положения, так как узлы (16, 11) ствола и рукоятки механически отсоединены на данном этапе. Однако для указания направления извлечения вдоль оси установки (IA) оператор дополнительно передвигает кнопку (300) фиксации в дистальном направлении в направлении разомкнутого положения, как показано на ФИГ. 7C. Более конкретно, по мере того как кнопка (300) фиксации передвигается в дистальном направлении, кулачковая поверхность (318) с понижающимся уклоном скользит в поперечном направлении вверх вдоль кулачкового основания (320). Поскольку кнопка (300) фиксации входит в фиксирующие пазы (322) узла (310) крепления фиксатора, за счет перемещения вверх кнопки (300) фиксации аналогичным образом принудительно перемещается весь узел (16) ствола вверх в направлении извлечения вдоль оси установки (IA). Другими словами, система (288) фиксации частично выталкивает узел (16) ствола вверх в направлении извлечения вдоль оси установки (IA) в ответ на дальнейшее дистальное передвижение кнопки (300). После того как оператор ощутит выталкивание за счет тактильной обратной связи, он может продолжать извлекать узел (16) ствола в направлении извлечения вдоль оси установки (IA) для завершения извлечения сменного узла (16) ствола из узла (11) рукоятки.
III. Хирургический инструмент с альтернативными системами фиксации
В некоторых случаях может оказаться целесообразным предоставление е хирургического инструмента (10, 210) с альтернативной формой системы (88, 288 фиксации). В частности, может оказаться целесообразным предоставление хирургического инструмента (10, 210) с другой системой (488) фиксации с выталкиванием, которая включает в себя поворотный переключатель (500) фиксации, который выполнен с возможностью функционального отсоединения узлов (16, 11) ствола и рукоятки и указания направления извлечения вдоль оси установки (IA) (см. ФИГ. 2). Кроме того, может также оказаться целесообразным применение хирургического инструмента (10, 210) с системой (688) фиксации без выталкивания, включающей в себя поворотный переключатель (700) фиксации, который не перемещает принудительно или иным образом не выталкивает узел (16) ствола из узла (11) рукоятки. Различные примеры альтернативных систем (488, 688) фиксации более подробно описаны ниже; при этом дополнительные примеры будут очевидны средним специалистам в данной области в контексте идей, представленных в настоящем документе. Следует понимать, что различные системы фиксации, описанные ниже, могут быть легко встроены в хирургический инструмент (10, 210) вместо соответствующих систем (88, 288) фиксации. Таким образом, схожие числовые обозначения, приведенные ниже, по-прежнему указывают на схожие элементы, описанные выше.
A. Пример альтернативной системы фиксации с выталкиванием с применением переключателя фиксации
На ФИГ. 8A-1C показан другой пример хирургического инструмента (410), который включает в себя узел (11) рукоятки, узел (16) ствола и систему (488) фиксации с выталкиванием, выполненную с возможностью указания направления извлечения вдоль оси установки (IA) (см. ФИГ. 2). Система (488) фиксации включает в себя узел (502) исполнительного механизма фиксации, который имеет фиксирующий элемент в форме переключателя (500) фиксации и узел (510) крепления фиксатора. Узел (510) крепления фиксатора выполнен с возможностью поддержки переключателя (500) фиксации с возможностью поворота во время перемещения оператором переключателя (500) фиксации между заблокированным положением, разомкнутым положением и положением для извлечения, как, соответственно, показано на ФИГ. 8A-8C и ФИГ. 10A-10C. Таким образом, оператор поворачивает переключатель (500) фиксации в дистальном направлении из заблокированного положения в разомкнутое положение, чтобы функционально отсоединить узел (16) ствола от узла (11) рукоятки. Затем оператор дополнительно поворачивает переключатель (500) фиксации в дистальном направлении из разомкнутого положения в положение для извлечения, чтобы принудительно переместить узел (16) ствола в направлении извлечения относительно узла (16) ствола. Хотя подробное описание заблокированного положения, разомкнутого положения и положения для извлечения приведено далее в качестве отдельных положений, следует понимать, что оператор может плавно перемещать переключатель (500) фиксации из заблокированного положения в разомкнутое положение и извлекать узел (16) ствола единым общим движением; или с помощью отдельных манипуляций по желанию оператора.
Как показано на ФИГ 8A и 10A, система (488) фиксации дополнительно содержит блокирующий элемент рукоятки в форме дистального участка (78) соединительного фланца и блокирующий элемент ствола в форме блокирующей вилки (90). Кнопка (500) фиксации включает в себя проксимальную поверхность (514) захвата и дистальный выступ (516) для поворота блокирующей вилки (90) и высвобождения поворотных ушек (94) из канавок (98). Дистальный выступ (516) выступает в дистальном направлении от проксимальной поверхности (314) захвата и проходит до блокирующей вилки (90). В настоящем примере дистальный выступ (516) дополнительно включает в себя дугообразную кулачковую поверхность (530), выполненную с возможностью зацепления и поворота вплотную к блокирующей вилке (90) для дистального направления блокирующей вилки (90). Переключатель (500) фиксации дополнительно включает в себя пару кулачковых выступов (532), каждый из которых имеет поверхность (518) кулачкового выступа, выполненную с возможностью зацепления и поворота вдоль кулачкового основания (520), жестко прикрепленного к узлу (11) рукоятки.
Узел (510) крепления фиксатора выполнен с возможностью обеспечения поворота переключателя (500) фиксации в продольном направлении относительно кулачкового основания (520) и вплотную к нему. В примере, показанном на ФИГ. 9 и 10A, узел (510) крепления фиксатора имеет пару противоположных продольных фиксирующих пазов (522), в которые входят с возможностью поворота противоположные концы переключателя (500) фиксации. Более конкретно, переключатель (500) фиксации включает в себя соосные и противоположные боковые валы (534), размещенные с возможностью поворота внутри соответствующих фиксирующих пазов (522). Каждый из боковых валов (534) также соответственно включает в себя кулачковый выступ (532), проходящий от него к кулачковому основанию (520). Узел (510) крепления фиксатора также содержит отверстие (524), расположенное таким образом, что каждая поверхность (518) кулачкового выступа контактирует с проходящим через него кулачковым основанием (520). Таким образом, зацепление между каждой поверхностью (518) кулачкового выступа и кулачковым основанием (520) обеспечивает поперечное перемещение переключателя (500) фиксации, тогда как переключатель (500) фиксации выполнен с возможностью поворота внутри каждого продольного фиксирующего паза (522) в узле (510) крепления фиксатора.
На ФИГ. 8A и 10A показан узел (16) ствола в процессе применения, функционально соединенный с узлом (11) рукоятки и переключателем (500) фиксации в заблокированном положении. С целью отсоединения узла ствола и узла рукоятки (16, 11), оператор захватывает проксимальную поверхность (514) захвата большим или другим пальцем руки и поворачивает переключатель (500) фиксации в дистальном направлении в направлении разомкнутого положения. В свою очередь, дугообразная кулачковая поверхность (530) дистального выступа (516) зацепляет блокирующую вилку (90) и поворачивает блокирующую вилку (90) в дистальном направлении для высвобождения поворотных ушек (94). На ФИГ. 8B и 10B показаны функционально отсоединенные узлы (16, 11) ствола и рукоятки с переключателем (500) фиксации в разомкнутом положении.
В настоящем примере узел (16) ствола можно извлечь вдоль оси установки (IA) (см. ФИГ. 2) из разомкнутого положения, так как узлы (16, 11) ствола и рукоятки механически отсоединены на данном этапе. Однако для указания направления извлечения вдоль оси установки (IA) оператор дополнительно поворачивает переключатель (500) фиксации в дистальном направлении в направлении разомкнутого положения, как показано на ФИГ. 8C и 10C. Более конкретно, по мере того как переключатель (500) фиксации поворачивается дистально, поверхность каждого кулачкового выступа (518) поворачивается вокруг кулачкового основания (520) и направляет боковые валы (534) переключателя (500) фиксации вверх. Поскольку переключатель (500) фиксации входит в фиксирующие пазы (522) узла (510) крепления фиксатора, за счет перемещения вверх переключателя (500) фиксации аналогичным образом принудительно перемещается весь узел (16) ствола вверх в направлении извлечения вдоль оси установки (IA). Другими словами, система (488) фиксации частично выталкивает узел (16) ствола вверх в направлении извлечения вдоль оси установки (IA) в ответ на дальнейший поворот переключателя (500) фиксации. После того как оператор ощутит выталкивание за счет тактильной обратной связи, он может продолжать извлекать узел (16) ствола в направлении извлечения вдоль оси установки (IA) для завершения извлечения сменного узла (16) ствола из узла (11) рукоятки.
B. Пример альтернативной системы фиксации без выталкивания с применением переключателя фиксации
На ФИГ. 11A-12B показан другой пример хирургического инструмента (610), который включает в себя систему (688) фиксации без выталкивания, имеющую переключатель (700) фиксации, выполненный с возможностью отсоединения узла ствола и узла рукоятки (16, 11) без указания направления извлечения вдоль оси установки (IA) (см. ФИГ. 2). Система (688) фиксации включает в себя узел (702) исполнительного механизма фиксации, который имеет фиксирующий элемент в форме переключателя (700) фиксации и узел (510) крепления фиксатора. Узел (510) крепления фиксатора выполнен с возможностью поддержки переключателя (700) фиксации с возможностью поворота во время перемещения оператором переключателя (700) фиксации из заблокированного положения в разомкнутое положение, как, соответственно, показано на ФИГ. 11A-11B и ФИГ. 12A-12B. Таким образом, оператор поворачивает переключатель (700) фиксации в дистальном направлении из заблокированного положения в разомкнутое положение, чтобы функционально отсоединить узел (16) ствола от узла (11) рукоятки.
Как правило, переключатель (700) фиксации перемещается аналогично переключателю (500) фиксации (см. ФИГ. 10A-B) из заблокированного положения в разомкнутое положение. Однако переключатель (700) фиксации не содержит кулачковых выступов (532) и взаимодействующего кулачкового основания (520) для принудительного перемещения узла (16) ствола в направлении извлечения вдоль оси установки (IA). Вместо этого в системе (688) фиксации используется интуитивно понятный переключатель (700) фиксации для указания оператору направления извлечения вдоль оси установки (IA).
На ФИГ. 11A и 12A показан узел (16) ствола в процессе применения, функционально соединенный с узлом (11) рукоятки, и переключатель (700) фиксации в заблокированном положении. В целях отсоединения узла ствола и узла рукоятки (16, 11), оператор захватывает проксимальную поверхность (514) захвата большим или другим пальцем руки и поворачивает переключатель (500) фиксации в направлении разомкнутого положения. В свою очередь, дугообразная кулачковая поверхность (530) дистального выступа (516) зацепляет блокирующую вилку (90) и поворачивает блокирующую вилку (90) в дистальном направлении для высвобождения поворотных ушек (94). На ФИГ. 11B и 12B показаны функционально отсоединенные узлы (16, 11) ствола и рукоятки с переключателем (500) фиксации в разомкнутом положении. Оператор просто направляет узел (16) ствола из разомкнутого положения в направлении извлечения вдоль оси установки (IA) для завершения извлечения сменного узла (16) ствола из узла (11) рукоятки.
IV. Хирургический инструмент с узлом ствола с обеспечением обмена данными с узлом рукоятки
В некоторых случаях может оказаться целесообразным предоставление хирургического инструмента (10, 210, 410, 610) с аппаратным и программным обеспечением, выполненным с возможностью передачи данных от узла (16) ствола к узлу (11) рукоятки. В частности, может оказаться целесообразным установить узел (11) рукоятки с предварительно заданной клинической функцией, которая уникальна для конкретного типа сменного узла (16) ствола, соединяемого с узлом (11) рукоятки. Следовательно, узел (11) рукоятки можно использовать для обеспечения различных предопределенных клинических функций, соответствующим образом уникальных, с различными типами узлов ствола (не показаны). Пример такого хирургического инструмента (810) более подробно описан ниже; при этом дополнительные примеры будут очевидны средним специалистам в данной области в контексте идей, представленных в настоящем документе. Следует понимать, что аппаратное и любое соответствующее программное обеспечение, описанные ниже, могут легко быть легко встроены в хирургический инструмент (10, 210, 410, 610). Таким образом, схожие числовые обозначения, приведенные ниже, указывают на схожие элементы, описанные выше.
На ФИГ. 13-14 показан один пример хирургического инструмента (810), который выполнен с возможностью передачи данных, таких как параметры программного обеспечения и/или рабочие параметры, от узла (816) ствола к узлу (811) рукоятки. Узел (816) ствола включает в себя память, такую как элемент (910) флэш-памяти, выполненный с возможностью хранения данных, таких как параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с данным конкретным типом узла (816) ствола. Узел (811) рукоятки включает в себя дисплей (912), микроконтроллер (914) и программируемую пользователем вентильную матрицу (916). По мере того как узел (816) ствола функционально соединяется с узлом (811) рукоятки, программируемая пользователем вентильная матрица (916) и микроконтроллер (914) электрически соединяются параллельно между дисплеем (912) и элементом (910) флэш-памяти.
Микроконтроллер (914) включает в себя основной функциональный код для общей эксплуатации узла (811) рукоятки, в то время как программируемая пользователем вентильная матрица (916), как правило, является пустой и легко программируемой. В данном примере микроконтроллер (914) не содержит такие данные, как параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с конкретным типом узла (816) ствола. Вместо этого микроконтроллер (914) содержит такие данные, как параметры программного обеспечения и/или рабочие параметры, которые, как правило, связаны с различными типами узлов (816) ствола. В процессе применения микроконтроллер (914) инструктирует пользователя в отношении управления узлом (811) рукоятки, например, путем подачи инструкций оператору с помощью дисплея (912). При подготовке к управлению узлом (816) ствола оператор функционально соединяет узел (816) ствола с узлом (811) рукоятки, как показано на ФИГ. 13-14. После функционального соединения микроконтроллер (914) обеспечивает связь и передачу данных из флэш-памяти (910) и в программируемую пользователем вентильную матрицу (916) таким образом, что узел (811) рукоятки затем настраивается для выполнения предварительно заданной клинической функции, которая главным образом связана с конкретным типом узла (816) ствола.
Иными словами, узел (811) рукоятки не содержит таких данных, как параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с конкретным типом узла (816) ствола, до тех пор, пока узел (816) ствола не будет полностью соединен с узлом (811) рукоятки. Узел (816) ствола представляет собой компонент, который постоянно хранит такие данные, как параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с данным конкретным типом узла ствола (816). Такие данные (т. е. параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с данным конкретным типом узла (816) ствола), автоматически передаются в программируемую пользователем вентильную матрицу (916), когда узел (816) ствола полностью соединен с узлом (811) рукоятки. Если впоследствии инструмент (810) используется (в то время как вышеуказанный узел (816) ствола полностью соединен с узлом (811) рукоятки), параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с данным конкретным типом узла (816) ствола, выполняются с программируемой пользователем вентильной матрицы (916). Следует понимать, что программируемая пользователем вентильная матрица (916) является «чистым листом» для каждого узла (816) ствола, который соединен с узлом (811) рукоятки, благодаря чему для узла (811) рукоятки не требуется постоянно хранить параметры программного обеспечения и/или рабочие параметры, которые прежде всего связаны с конкретными типами узлов (816) ствола. В узле (811) рукоятки должны храниться только такие данные, как параметры программного обеспечения и/или рабочие параметры, которые являются общими для различных типов узлов ствола (816). Это позволяет легче приспособить узел (811) рукоятки к новым и разным типам узлов (816) ствола.
Следует понимать, что такие данные, как параметры программного обеспечения и/или рабочие параметры, которые передаются из флэш-памяти (910) в программируемую пользователем вентильную матрицу (916), могут включать в себя полные логические рабочие параметры узла (816) ствола, а не только простое описание аппаратного обеспечения. Другими словами, полная клиническая функция узла (811) рукоятки может быть обновлена или модифицирована с помощью флэш-памяти (910) узла (816) ствола.
V. Хирургический инструмент с альтернативным узлом ствола
Может также оказаться целесообразным предоставление хирургического инструмента (10, 210, 410, 610, 810) с альтернативным узлом (1016) ствола, который выполнен с возможностью обеспечения усовершенствованного узла. Пример такого хирургического инструмента (1010), который имеет узел (1016) ствола, более подробно описан ниже; при этом дополнительные примеры будут очевидны средним специалистам в данной области в контексте идей, представленных в настоящем документе. Следует понимать, что узел (1016) ствола, описанный ниже, может быть легко встроен в хирургический инструмент (10, 210, 410, 610). Таким образом, схожие числовые обозначения, приведенные ниже, указывают на схожие элементы, описанные выше.
Как показано на ФИГ. 15-19, хирургический инструмент (1010), включает в себя сменный узел (1016) ствола и узел (11) рукоятки. Узел (1016) ствола включает в себя цапфу (1020), которая выполнена с возможностью жесткой поддержки участка рамы ствола (не показан) фиксирующего элемента шарнирного сочленения (не показан). Цапфа (1020) также выполнена с возможностью скользящей поддержки в ней пускового элемента (1022). Кроме того, цапфа (1020) выполнена с возможностью скользящей поддержки закрывающей трубки (60), которая проходит вокруг цапфы (1020). Цапфа (1020) также может быть выполнена с возможностью скользящей поддержки проксимального приводного элемента (1024) шарнирного сочленения. Приводной элемент (1024) шарнирного сочленения имеет дистальный конец (1026), который выполнен с возможностью функционального зацепления с фиксирующим элементом шарнирного сочленения (не показан). Как указано выше, фиксирующий элемент шарнирного сочленения (не показан) и рама шарнирного сочленения (не показана) могут быть сконструированы и функционировать в соответствии по меньшей мере с некоторыми из идей, представленных в публикации США № 2014/0263541, описание которой включено в настоящий документ путем ссылки.
В настоящем примере цапфа (1020) имеет проксимальный конец (1028), который поддерживается с возможностью поворота в шасси (64) (см. ФИГ. 5A). В частности, проксимальный конец (1028) цапфы (1020) имеет выполненную на нем резьбу (1030) для резьбового крепления к подшипнику цапфы (не показан), который выполнена с возможностью поддержки внутри шасси (64) (см. ФИГ. 5A). Такая конструкция обеспечивает поворотное крепление цапфы (1020) таким образом, чтобы цапфа (1020) могла избирательно поворачиваться вокруг продольной оси узла (16) ствола относительно шасси (64).
Пусковой элемент (1022) поддерживается с возможностью осевого перемещения внутри цапфы (1020). Пусковой элемент (1022) включает в себя промежуточный участок (1032) пускового ствола, выполненный с возможностью крепления к дистальному режущему участку или режущему полотну (не показаны). Участок (1032) пускового ствола включает в себя продольный паз (1034) на его дистальном конце, который выполнен в нем с возможностью захвата дистального режущего полотна (не показано). Цапфа (1020) также имеет удлиненное отверстие, или окошко, (1036) для обеспечения сборки и вставки промежуточного участка (1032) пускового ствола в раму ствола (не показана). Пусковой элемент (1022) дополнительно может быть выполнен и функционировать в соответствии по меньшей мере с некоторыми из идей, представленных в публикации США № 2014/0263541, описание которой включено в настоящий документ путем ссылки.
В дополнение к указанному выше, узел (1016) ствола включает в себя узел муфты (1038), который может функционировать с возможностью избирательного и разъемного соединения приводного элемента (1024) шарнирного сочленения и пускового элемента (1022). В настоящем примере узел муфты (1038) включает в себя фиксирующую втулку, или гильзу (1040), расположенную вокруг пускового элемента (1022). Фиксирующая гильза (1040) может поворачиваться между зацепленным положением, в котором фиксирующая гильза (1040) соединяет приводной элемент (1024) шарнирного сочленения и пусковой элемент (1022); и расцепленным положением, в котором приводной элемент (1024) шарнирного сочленения не соединен функционально с пусковым элементом (1022). Когда фиксирующая гильза (1040) находится в своем зацепленном положении, за счет дистального перемещения пускового элемента (1022) можно перемещать приводной элемент (1024) шарнирного сочленения в дистальном направлении, и, соответственно, за счет проксимального перемещения пускового элемента (1022) можно перемещать приводной элемент (1024) шарнирного сочленения проксимально. Когда фиксирующая гильза (1040) находится в своем расцепленном положении, перемещение пускового элемента (1022) не передается на приводной элемент (1024) шарнирного сочленения, и, в результате, пусковой элемент (1022) может перемещаться независимо от приводного элемента (1024) шарнирного сочленения. Таким образом, следует понимать, что фиксирующая гильза (1040) выполнена с возможностью поворота для перехода между режимом привода шарнирного сочленения и режимом пускового привода. В различных обстоятельствах приводной элемент (1024) шарнирного сочленения может удерживаться в положении с помощью фиксирующего элемента шарнирного сочленения (не показан), когда приводной элемент (1024) шарнирного сочленения не перемещается в проксимальном или дистальном направлении с помощью пускового элемента (1022).
Фиксирующая гильза (1040) включает в себя цилиндрический, или по меньшей мере фактически цилиндрический, корпус, содержащий продольное отверстие (1042), образованное в нем с возможностью захвата пускового элемента (1022). Фиксирующая гильза (1040) также включает в себя диаметрально противоположные обращенные внутрь блокирующие выступы (1044) и обращенный наружу блокирующий элемент (1046). Блокирующие выступы (1044) выполнены с возможностью избирательного зацепления с пусковым элементом (1022). Более конкретно, когда фиксирующая гильза (1040) находится в своем зацепленном положении, блокирующие выступы (1044) расположены внутри приводной прорези (1048), образованной в пусковом элементе (1022), таким образом, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие передается от пускового элемента (1022) к фиксирующей гильзе (1040). Когда фиксирующая гильза (1040) находится в своем зацепленном положении, блокирующий элемент (1046) размещается внутри приводной щели (1050), образованной в приводном элементе (1024) шарнирного сочленения таким образом, что дистальное толкающее усилие и/или проксимальное вытягивающее усилие, прикладываемое к фиксирующей гильзе (1040), передается к приводному элементу (1024) шарнирного сочленения. В результате, когда фиксирующая гильза (1040) находится в своем зацепленном положении, пусковой элемент (1022), фиксирующая гильза (1040) и приводной (1024) элемент шарнирного сочленения будут перемещаться вместе.
С другой стороны, когда фиксирующая гильза (1040) находится в своем расцепленном положении, блокирующие выступы (1044) не расположены внутри приводной прорези (1048) пускового элемента (1022), и, в результате, дистальное толкающее усилие и/или проксимальное вытягивающее усилие не передается от пускового элемента (1022) к фиксирующей гильзе (1040). Соответственно, дистальное толкающее усилие и/или проксимальное вытягивающее усилие не передается на проксимальный приводной элемент (1024) шарнирного сочленения. В таких обстоятельствах пусковой элемент (1022) может скользить проксимально и/или в дистальном направлении относительно фиксирующей гильзы (1040) и проксимального приводного элемента (1024) шарнирного сочленения.
Узел (1016) ствола дополнительно включает в себя барабан (1052) переключателя, который размещается с возможностью поворота на закрывающей трубке (60), как более подробно показано на ФИГ. 19-20. Барабан (1052) переключателя включает в себя полый сегмент (1054) ствола, имеющий L-образный паз (1056), проходящий к дистальному отверстию (1058) в L-образный паз (1056). В дистальном отверстии (1058) размещается поперечный штифт (1060) пластины (1062) механизма сдвига. В одном примере пластина (1062) механизма сдвига размещается в продольном пазе (1064), предусмотренном в фиксирующей гильзе (1040), для обеспечения осевого перемещения фиксирующей гильзы (1040) при зацеплении с приводным элементом (1024) шарнирного сочленения. Кроме того, закрывающая трубка (60) включает в себя наружный L-образный паз (1066), через который вставляется пластина (1062) механизма сдвига для доступа к продольному пазу (1064) во время установки. Поворотная торсионная пружина (не показана) может быть включена, чтобы выполнить зацепление с барабаном (1052) переключателя для поворотного сдвига барабана (1052) переключателя относительно фиксирующей гильзы (1040). Барабан (1052) переключателя также включает в себя образованные в нем, по меньшей мере частично, кольцевые отверстия (1068), которые могут быть выполнены с возможностью захвата кольцевых стоек (не показаны), проходящих от половин мундштука (56, 58), и обеспечения относительного вращения, но не поступательного перемещения, между барабаном (1052) переключателя и проксимальным мундштуком (54). Вращение барабана (1052) переключателя в конечном итоге приводит к повороту пластины (1062) механизма сдвига и фиксирующей гильзы (1040) между зацепленным и расцепленным положениями. Таким образом, по существу мундштук (54) можно использовать для функционального расцепления и зацепления приводной системы шарнирного сочленения с системой пускового привода, как показано, соответственно, на ФИГ. 20A и 20B.
VI. Примеры комбинаций
Следующие примеры относятся к различным неисчерпывающим способам, с помощью которых можно комбинировать или применять идеи настоящего документа. Следует понимать, что представленные ниже примеры не предназначены для ограничения объема каких-либо пунктов формулы изобретения, которые могут быть представлены в любой момент времени в данной заявке или в последующих документах по данной заявке. Примеры не подразумевают отказа от формулы изобретения. Представленные ниже примеры предложены лишь в иллюстративных целях. Предполагается, что различные идеи настоящего документа можно компоновать и применять множеством других способов. Кроме того, предполагается, что некоторые варианты могут не включать определенные элементы, упомянутые в приведенных ниже примерах. Следовательно, ни один из упомянутых ниже аспектов или элементов не следует считать критическим, если иное явным образом не указано впоследствии авторами изобретения или правопреемником в интересах авторов изобретения. Если в данной заявке или в последующих документах по данной заявке представлены какие-либо пункты формулы изобретения, которые включают в себя дополнительные элементы, помимо упомянутых ниже, эти дополнительные элементы не будут считаться добавленными по какой-либо причине, относящейся к патентоспособности.
Пример 1
Хирургический инструмент, содержащий: (a) узел ствола, имеющий дистальный концевой участок и проксимальный концевой участок, причем проксимальный концевой участок включает в себя концевой эффектор, выступающий из него в дистальном направлении; (b) узел рукоятки, выполненный с возможностью размещения в нем проксимального концевого участка узла ствола; и (c) систему фиксации, выполненную с возможностью функционального соединения узла ствола с узлом рукоятки, причем система фиксации включает в себя: (i) блокирующий элемент ствола, соединенный с узлом ствола, (ii) блокирующий элемент рукоятки, соединенный с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки, (iii) кулачковое основание и (iv) фиксирующий элемент, причем фиксирующий элемент имеет кулачковую поверхность, выполненную с возможностью зацепления с кулачковым основанием, при этом фиксирующий элемент выполнен с возможностью избирательного перемещения из фиксированного положения в разомкнутое положение таким образом, что перемещение фиксирующего элемента в разблокированное положение может привести к отделению блокирующего элемента ствола от блокирующего элемента рукоятки и тем самым функциональному отсоединению узла ствола от узла рукоятки в разомкнутом положении, причем фиксирующий элемент дополнительно выполнен с возможностью избирательного перемещения из разомкнутого положения в положение для извлечения таким образом, что перемещение фиксирующего элемента в направлении положения для извлечения приводит к зацеплению кулачковой поверхности фиксирующего элемента с кулачковым основанием и, вследствие этого, к принудительному перемещению узла ствола в положение для извлечения относительно узла рукоятки для указания пользователю направления для извлечения.
Пример 2
Хирургический инструмент по примеру 1, в котором фиксирующий элемент выполнен с возможностью входить в зацепление по меньшей мере с одним из блокирующих элементов ствола и рукоятки и тем самым приводить к расцеплению блокирующего элемента ствола от блокирующего элемента рукоятки по мере перемещения фиксирующего элемента из разблокированного положения в направлении разомкнутого положения.
Пример 3
Хирургический инструмент по примеру 2, в котором узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент.
Пример 4
Хирургический инструмент по примеру 3, в котором фиксирующий элемент узла ствола выполнен с возможностью входить в зацепление с блокирующим элементом ствола и тем самым приводить к расцеплению блокирующего элемента ствола от блокирующего элемента рукоятки по мере перемещения фиксирующего элемента из разблокированного положения в направлении разомкнутого положения.
Пример 5
Хирургический инструмент по примеру 4, в котором блокирующий элемент рукоятки жестко соединен с узлом рукоятки, а блокирующий элемент ствола выполнен в форме блокирующей вилки ствола, соединенной с узлом ствола с возможностью поворота таким образом, что блокирующая вилка выполнена с возможностью смещения для зацепления с блокирующим элементом рукоятки.
Пример 6
Хирургический инструмент по одному или нескольким примерам 1-5, в которых узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент, причем фиксирующий элемент содержит кнопку фиксации, при этом кнопка фиксации установлена с возможностью скольжения на проксимальном концевом участке узла ствола таким образом, что кнопка фиксации выполнена с возможностью скольжения из заблокированного положения в направлении положения для извлечения.
Пример 7
Хирургический инструмент по примеру 6, в котором кнопка фиксации включает в себя дистальный выступ, выполненный с возможностью входить в зацепление с блокирующим элементом ствола для расцепления от блокирующего элемента рукоятки.
Пример 8
Хирургический инструмент по одному или нескольким примерам 6-7, в которых кулачковая поверхность кнопки фиксации выполнена в форме кулачковой поверхности с понижающимся уклоном, выполненной с возможностью скользить в поперечном направлении вдоль кулачкового основания, таким образом принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки.
Пример 9
Хирургический инструмент по одному или нескольким примерам 6-8, в которых система фиксации дополнительно включает в себя узел крепления фиксатора, жестко соединенный с его проксимальным концевым участком, причем узел крепления фиксатора выполнен с возможностью поперечного размещения кнопки фиксации, при этом кнопка фиксации выполнена с возможностью скольжения относительно узла крепления фиксатора из заблокированного положения в направлении положения для извлечения.
Пример 10
Хирургический инструмент по примеру 9, в котором узел крепления фиксатора включает проходящего через него отверстие, причем отверстие выполнено с возможностью обеспечения непосредственного контакта между кулачковым основанием и кулачковой поверхностью кнопки фиксации через него.
Пример 11
Хирургический инструмент по одному или нескольким примерам 1-10, в которых узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент, причем фиксирующий элемент содержит переключатель фиксации, при этом переключатель фиксации установлен на проксимальном концевом участке узла ствола с возможностью поворота таким образом, что переключатель фиксации может выполнять поворот из заблокированного положения в направлении положения для извлечения.
Пример 12
Хирургический инструмент по примеру 11, в котором переключатель фиксации включает в себя дистальный выступ, выполненный с возможностью входить в зацепление с блокирующим элементом ствола для расцепления от блокирующего элемента рукоятки.
Пример 13
Хирургический инструмент по одному или нескольким примерам 11-12, в которых кулачковая поверхность переключателя фиксации выполнена в форме поверхности кулачкового выступа, выполненной с возможностью скользить с возможностью поворота вдоль кулачкового основания, тем самым принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки.
Пример 14
Хирургический инструмент по одному или нескольким примерам 11-13, в которых система фиксации дополнительно включает в себя узел крепления фиксатора, жестко соединенный с его проксимальным концевым участком, причем узел крепления фиксатора выполнен с возможностью размещения переключателя фиксации таким образом, что переключатель фиксации может выполнять поворот относительно узла крепления фиксатора из заблокированного положения в направлении положения для извлечения.
Пример 15
Хирургический инструмент по примеру 14, в котором узел крепления фиксатора включает в себя проходящее через него отверстие, причем отверстие выполнено с возможностью обеспечения непосредственного контакта между кулачковым основанием и кулачковой поверхностью переключателя фиксации через него.
Пример 16
Хирургический инструмент, содержащий: (a) узел ствола, имеющий дистальный концевой участок и проксимальный концевой участок, причем проксимальный концевой участок включает в себя концевой эффектор, выступающий из него в дистальном направлении; (b) узел рукоятки, выполненный с возможностью размещения в нем проксимального концевого участка узла ствола; и (c) систему фиксации, выполненную с возможностью функционального соединения узла ствола с узлом рукоятки, причем система фиксации включает в себя: (i) блокирующий элемент ствола, соединенный с узлом ствола, (ii) блокирующий элемент рукоятки, соединенный с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки, и (iii) переключатель фиксации, выполненный с возможностью избирательного поворота из заблокированного положения в разомкнутое положение таким образом, что перемещение переключателя фиксации в разблокированное положение приводит к отделению блокирующего элемента ствола от блокирующего элемента рукоятки и тем самым функциональному отсоединению узла ствола от узла рукоятки в разомкнутом положении.
Пример 17
Хирургический инструмент по примеру 16, в котором система фиксации дополнительно содержит кулачковое основание, а переключатель фиксации включает поверхность кулачкового выступа, причем поверхность кулачкового выступа выполнена с возможностью скользить с возможностью поворота вдоль кулачкового основания, тем самым принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки из разомкнутого положения в направлении положения для извлечения для указания пользователю направления извлечения.
Пример 18
Способ извлечения узла ствола из узла рукоятки хирургического инструмента, причем хирургический инструмент имеет систему фиксации, содержащую блокирующий элемент ствола, блокирующий элемент рукоятки, кулачковое основание и фиксирующий элемент, при этом блокирующий элемент ствола соединен с узлом ствола, блокирующий элемент рукоятки соединен с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки, а элемент фиксации имеет кулачковую поверхность, выполненную с возможностью зацепления с кулачковым основанием, при этом способ включает: (a) перемещение фиксирующего элемента из заблокированного положения в направлении разомкнутого положения для расцепления блокирующего элемента ствола от блокирующего элемента рукоятки в разомкнутом положении; (b) функциональное отсоединение узла ствола от узла рукоятки; (c) перемещение фиксирующего элемента из разомкнутого положения в направлении положения для извлечения; и (d) зацепление кулачковой поверхности узла ствола с кулачковым основанием для принудительного перемещения узла ствола в направлении извлечения относительно узла рукоятки для извлечения узла ствола из узла рукоятки.
Пример 19
Способ по примеру 18, в котором фиксирующий элемент содержит кнопку фиксации, а перемещение кнопки фиксации дополнительно предусматривает скольжение кнопки фиксации.
Пример 20
Способ по одному или нескольким примерам 18-19, в котором фиксирующий элемент содержит переключатель фиксации, а перемещение кнопки фиксации дополнительно предусматривает поворот переключателя фиксации.
VII. Прочее
Следует понимать, что любое исполнение инструментов, описанных в настоящем документе, может включать различные другие элементы, в дополнение к тем, которые описаны выше, или вместо них. Только в качестве примера, любой из инструментов, описанных в настоящем документе, также может включать один или более различных элементов, описанных в любом из различных документов, включенных в настоящий документ путем ссылки. Также следует понимать, что представленные в настоящем документе идеи можно легко применить к любому из инструментов, описанных в любом другом документе, процитированном в настоящем документе, так что существует множество способов комбинирования идей настоящей заявки с идеями любого документа, процитированного в настоящем документе. Другие типы инструментов, к которым можно отнести представленные в настоящем документе идеи, будут очевидны специалистам в данной области.
Также следует понимать, что любые диапазоны значений, упомянутые в настоящем документе, включают верхнюю и нижнюю границы таких диапазонов. Например, диапазон, выраженный как «от приблизительно 2,5 сантиметра до приблизительно 3,8 сантиметра (от 1,0 дюйма до приблизительно 1,5 дюйма)», следует понимать как «от приблизительно 2,5 сантиметра и до приблизительно 3,8 сантиметра (от 1,0 дюйма до приблизительно 1,5 дюйма) включительно», в дополнение к значениям между верхней и нижней границами.
Следует учитывать, что любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в него только в той степени, в которой включенный материал не противоречит существующим определениям, положениям или другим материалам описания, изложенным в настоящем описании. Таким образом, описание, в прямой форме изложенное в настоящем документе, в той мере, в которой это необходимо, превалирует над любым противоречащим материалом, включенным в настоящий документ путем ссылки. Любой материал или его часть, указанные как включенные в настоящий документ путем ссылки, но противоречащие существующим определениям, положениям или другим материалам описания, изложенным в настоящем документе, будут включены только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
Варианты описанных выше устройств могут применяться в традиционных видах медицинского лечения и процедурах, выполняемых медицинским специалистом, а также в роботизированных видах медицинского лечения и процедурах. Только в качестве примера, различные идеи, представленные в настоящем документе, могут быть легко встроены в роботизированную хирургическую систему, такую как система DAVINCI™, разработанная компанией Intuitive Surgical, Inc., г. Саннивейл, штат Калифорния, США. Аналогичным образом, специалистам в данной области будет понятно, что различные идеи, представленные в настоящем документе, можно легко скомбинировать с различными идеями из патента США № 6,783,524, озаглавленного «Роботизированный хирургический инструмент с инструментом для ультразвуковой каутеризации и рассечения», опубликованного 31 августа 2004 г., описание которого включено в настоящий документ путем ссылки.
Описанные выше варианты можно выполнить с возможностью утилизации после однократного применения или их можно выполнить с возможностью многократного применения. Либо в одном, либо в обоих случаях после по меньшей мере одного применения они могут быть подготовлены для повторного применения. Подготовка для повторного применения может включать в себя любую комбинацию стадий разборки устройства, затем очистки или замены конкретных фрагментов и последующей повторной сборки. В частности, некоторые варианты устройства можно разобрать, и любое число конкретных фрагментов или деталей устройства можно избирательно заменить или удалить в любой комбинации. После очистки и/или замены конкретных деталей некоторые версии устройства могут быть повторно собраны для последующего применения либо в отделении, выполняющем подготовку к повторному применению, либо силами оператора непосредственно до процедуры. Специалистам в данной области будет понятно, что при подготовке устройства для повторного применения можно использовать различные методики разборки, очистки/замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство входят в объем настоящей заявки.
Исключительно для примера описанные в настоящем документе варианты можно стерилизовать до и/или после процедуры. В одной методике стерилизации устройство помещают в закрытый и герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Впоследствии контейнер и устройство можно поместить в поле излучения, которое может проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или высокоэнергетический поток электронов. Излучение может убивать бактерии на устройстве и в контейнере. Впоследствии стерилизованное устройство можно хранить в стерильном контейнере для дальнейшего применения. Устройство также можно стерилизовать с применением любой другой методики, известной в данной области, включая, без ограничений, бета- или гамма-излучение, этиленоксид или пар.
Обычный специалист в данной области может осуществлять различные показанные и описанные варианты осуществления настоящего изобретения, дополнительные адаптации способов и систем, описанных в настоящем документе, путем внесения соответствующих модификаций без отступления от объема настоящего изобретения. Были упомянуты некоторые из таких потенциальных модификаций, а другие будут очевидны специалистам в данной области. Например, описанные выше примеры, варианты осуществления, геометрические формы, материалы, размеры, соотношения, стадии и т. п. являются иллюстративными и не являются обязательными. Соответственно, объем настоящего изобретения следует рассматривать в свете представленной ниже формулы изобретения, и следует понимать, что он не ограничен подробной информацией о конструкции и эксплуатации, показанной и описанной в спецификации и на чертежах.
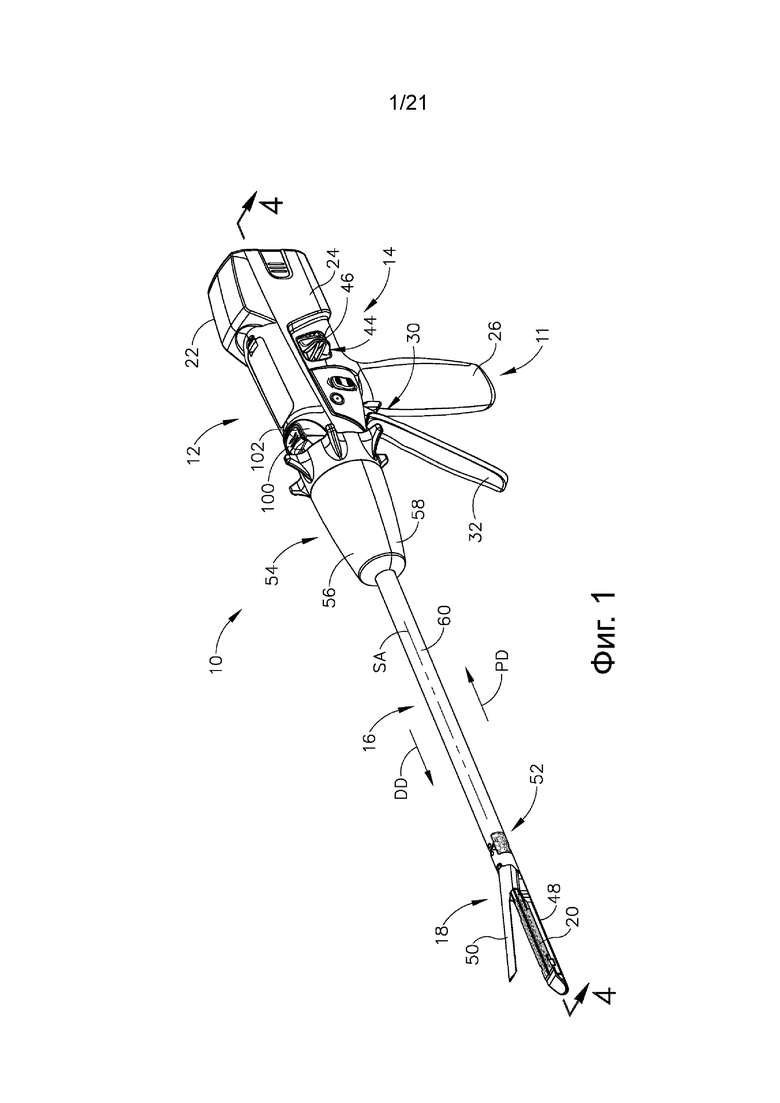
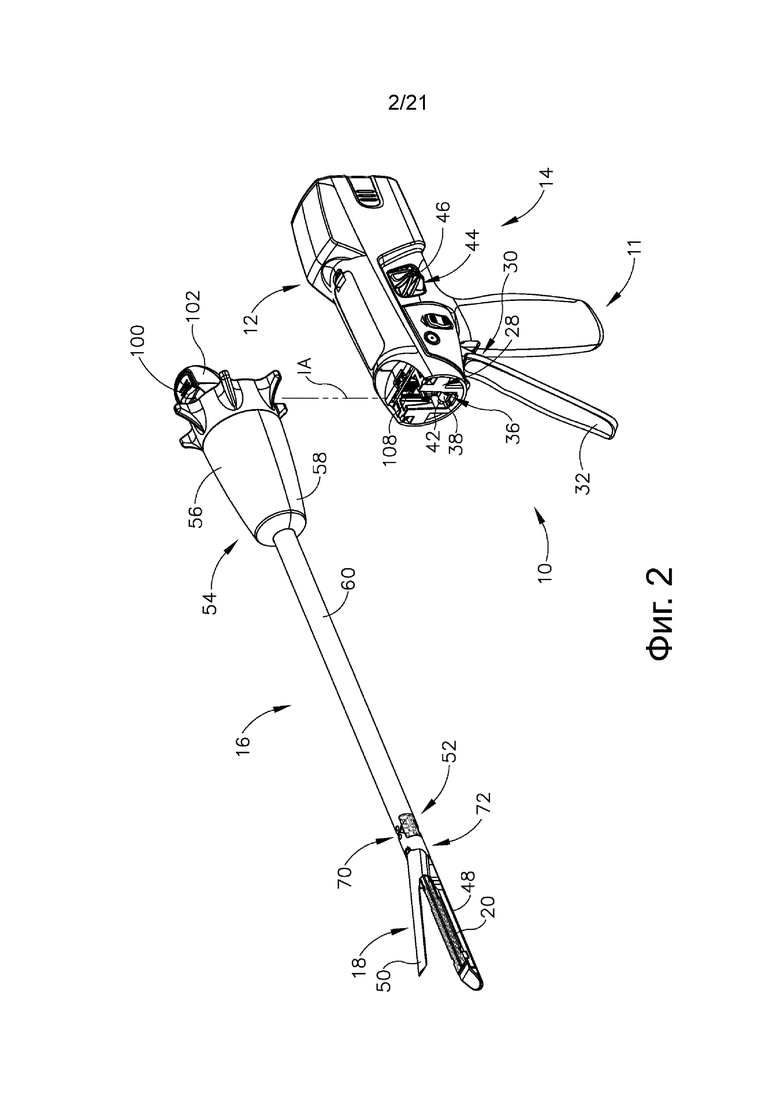
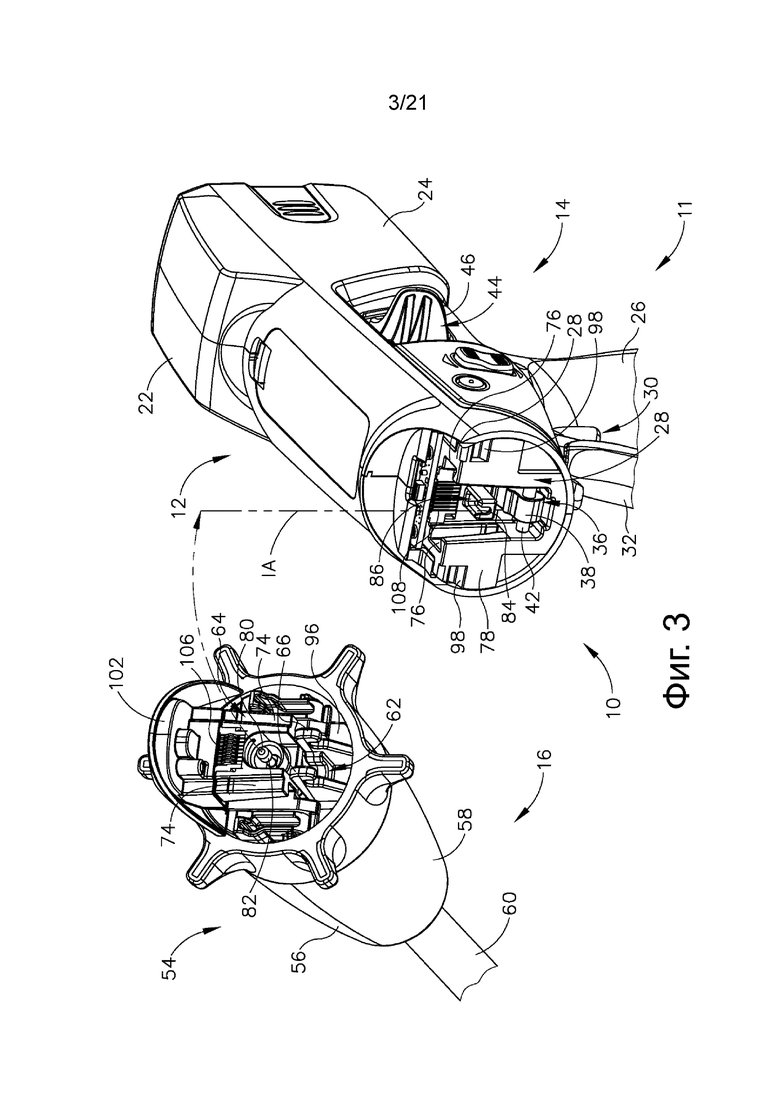
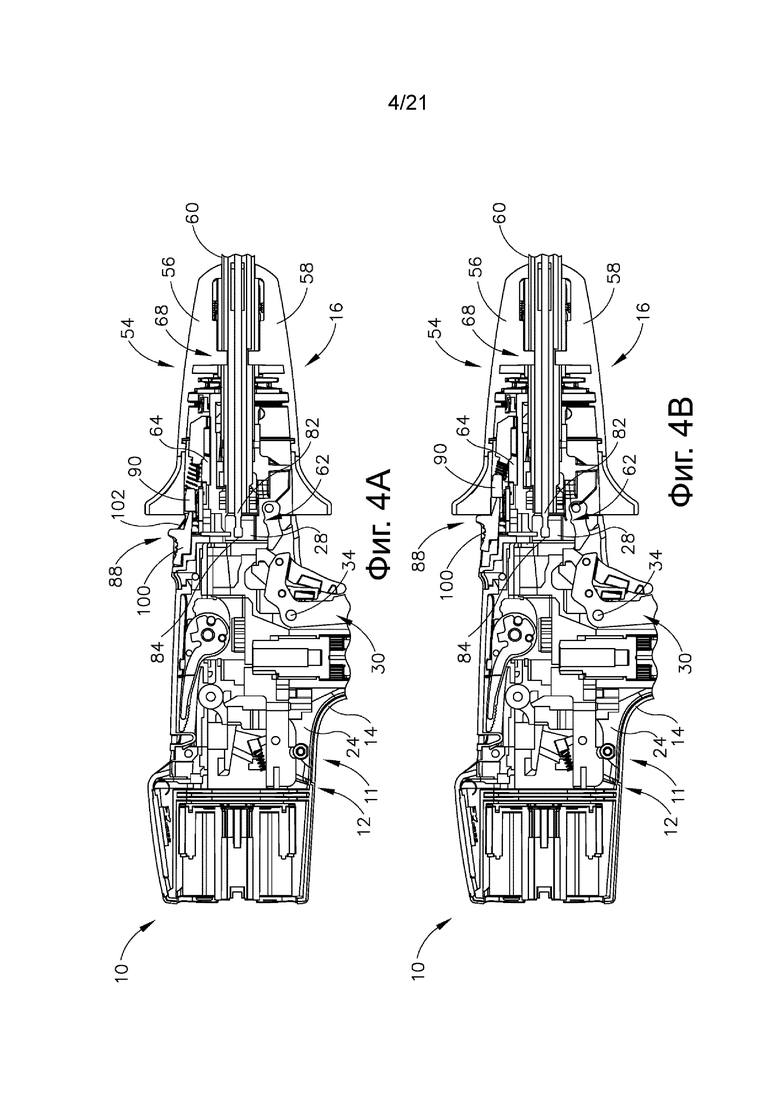
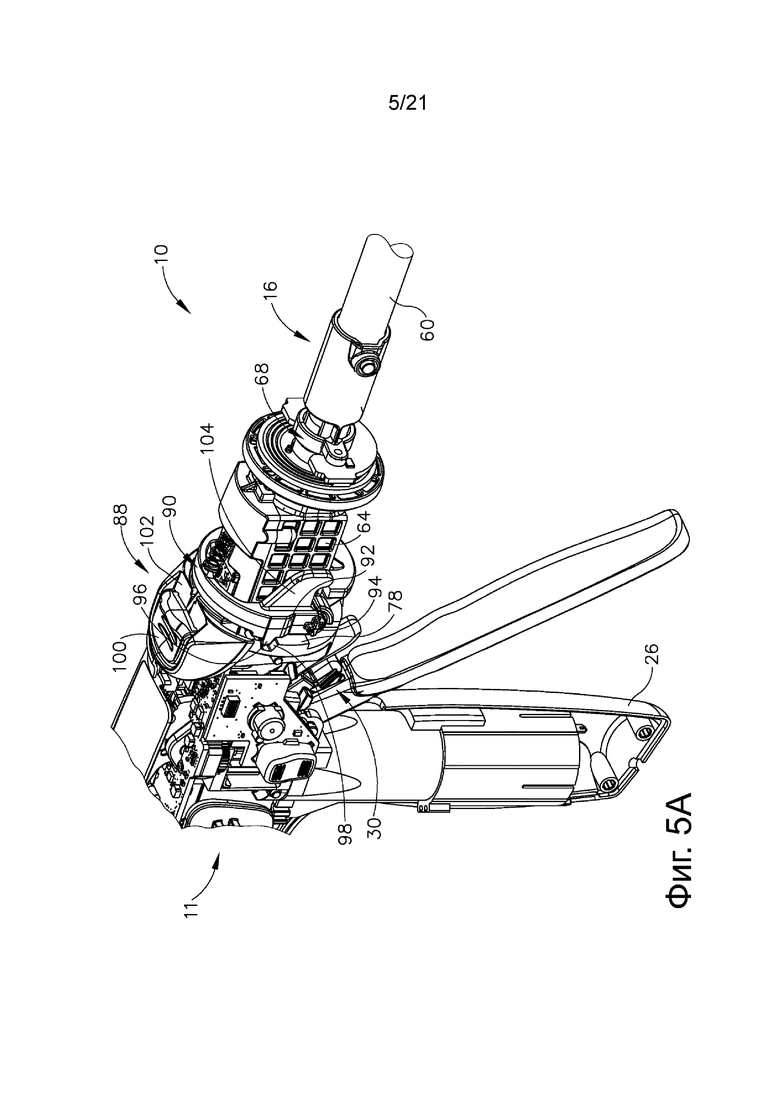
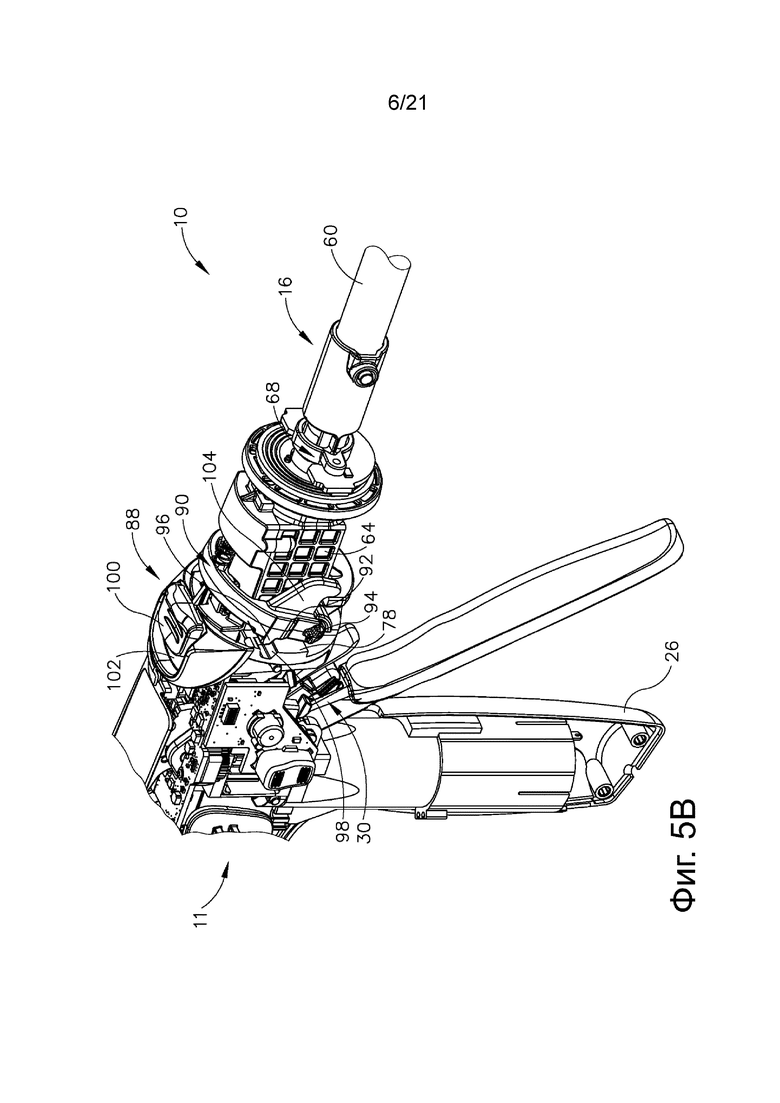
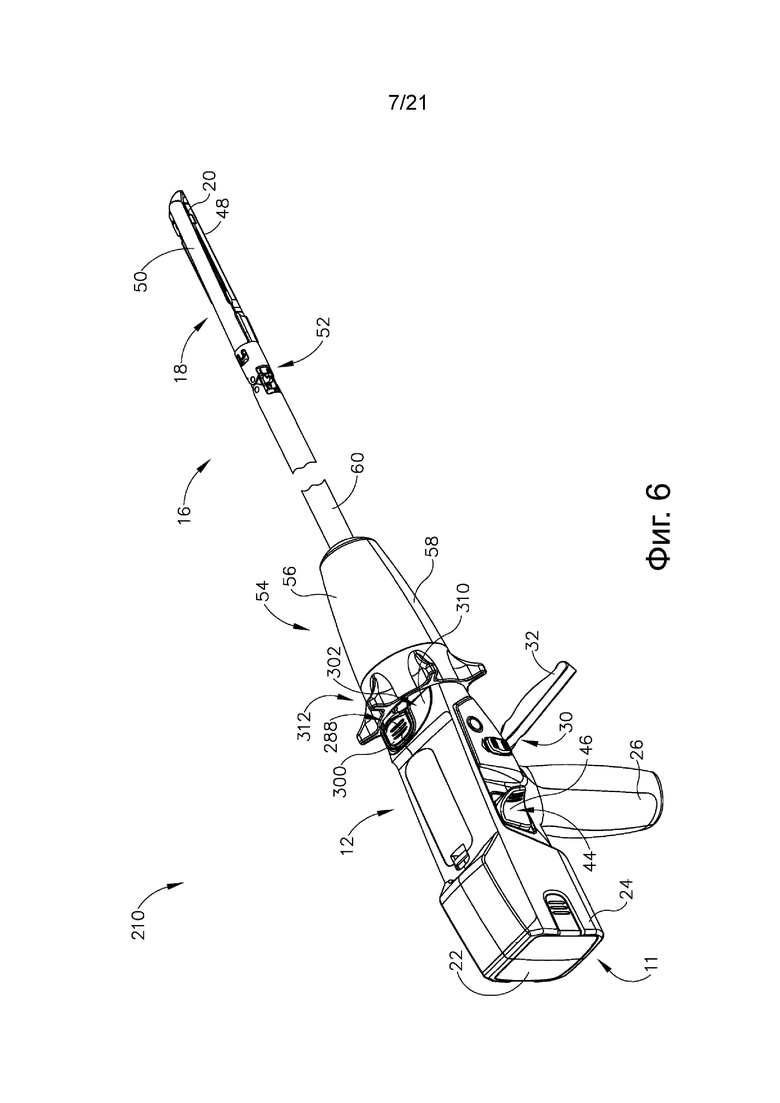
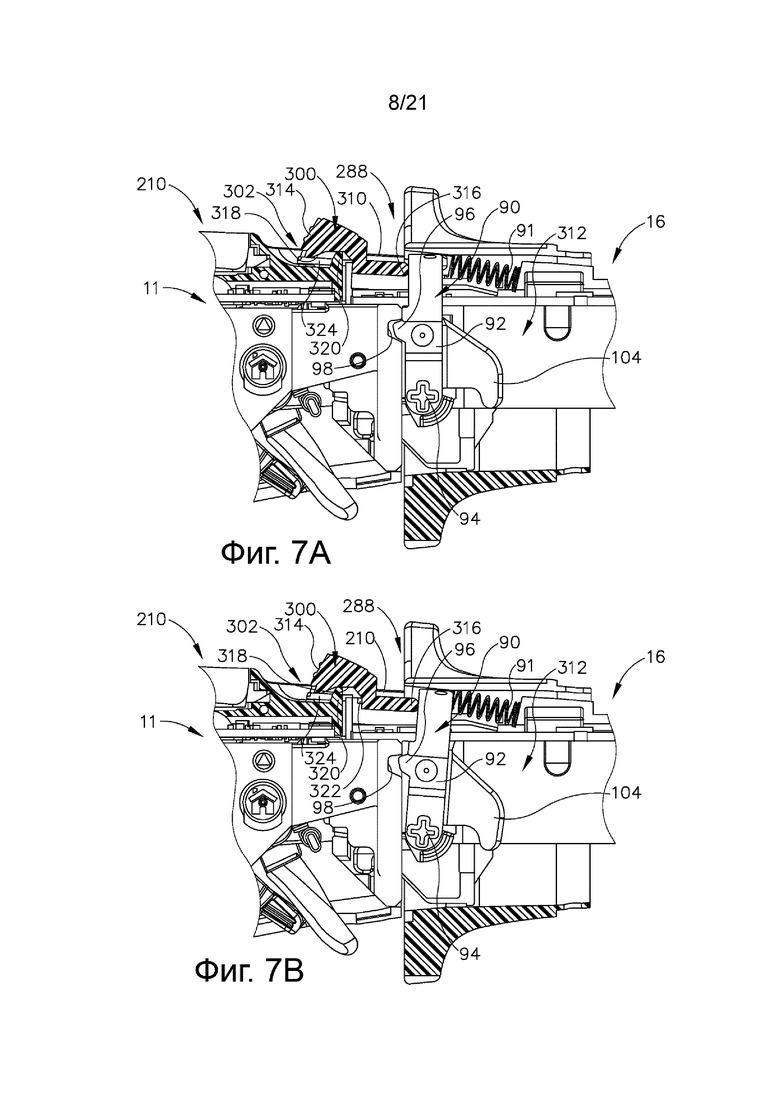
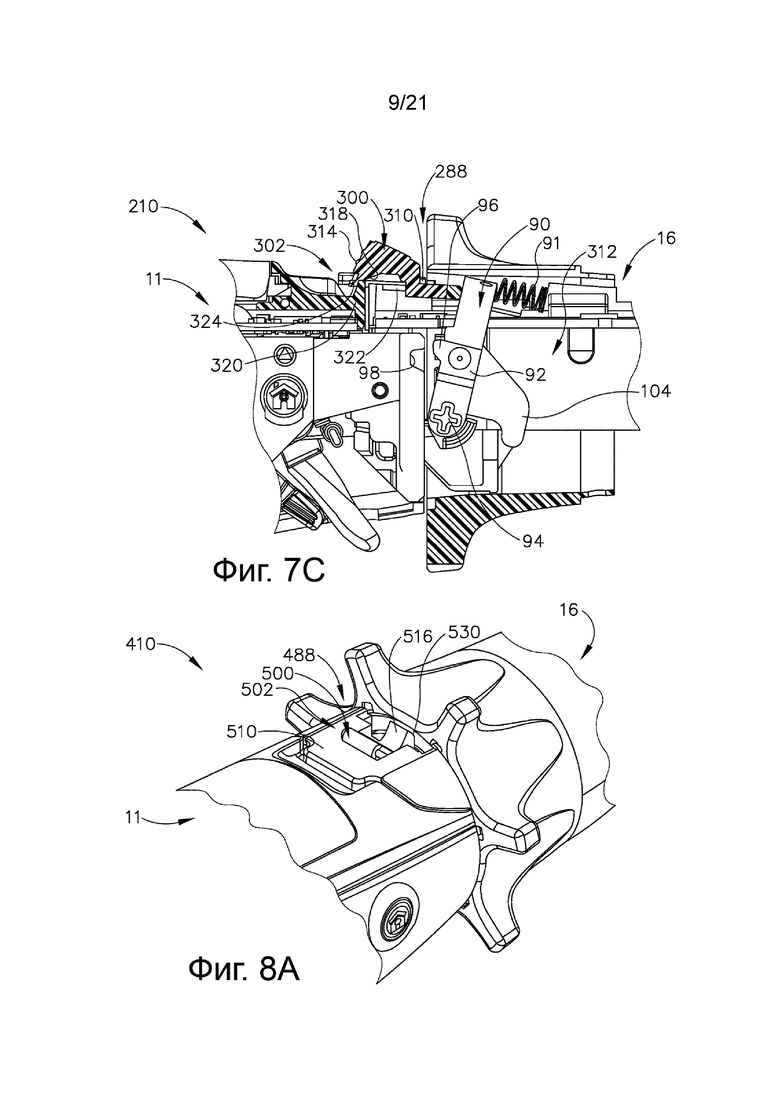
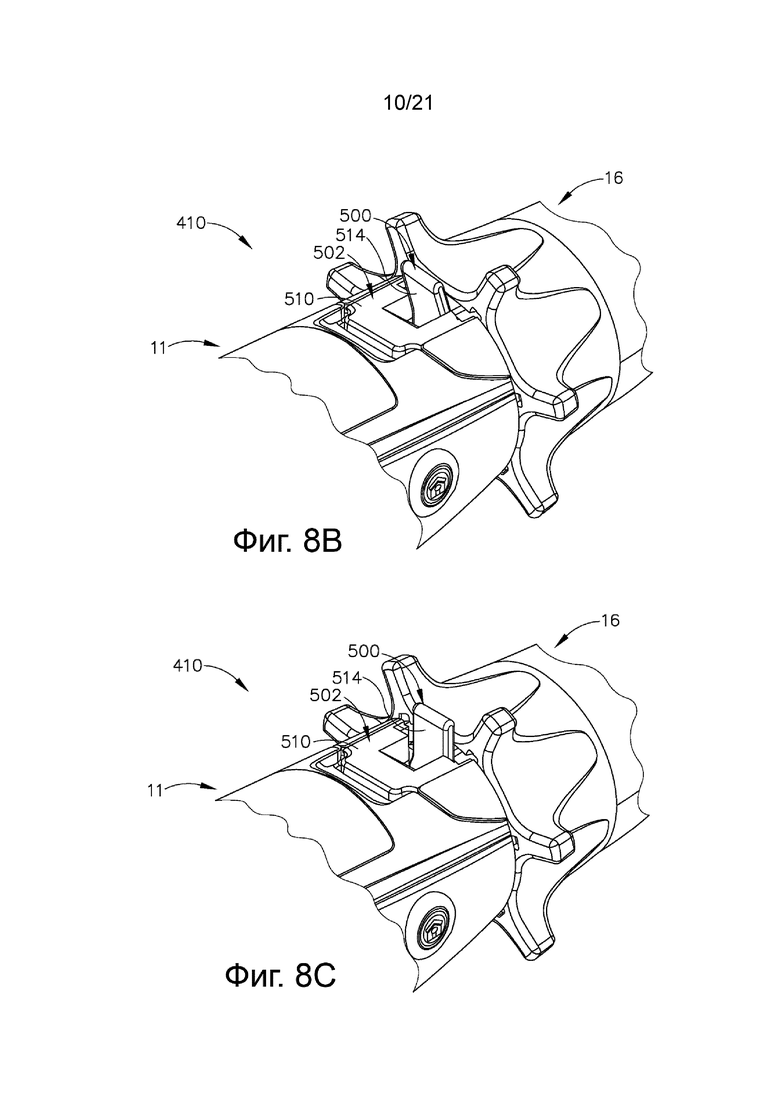
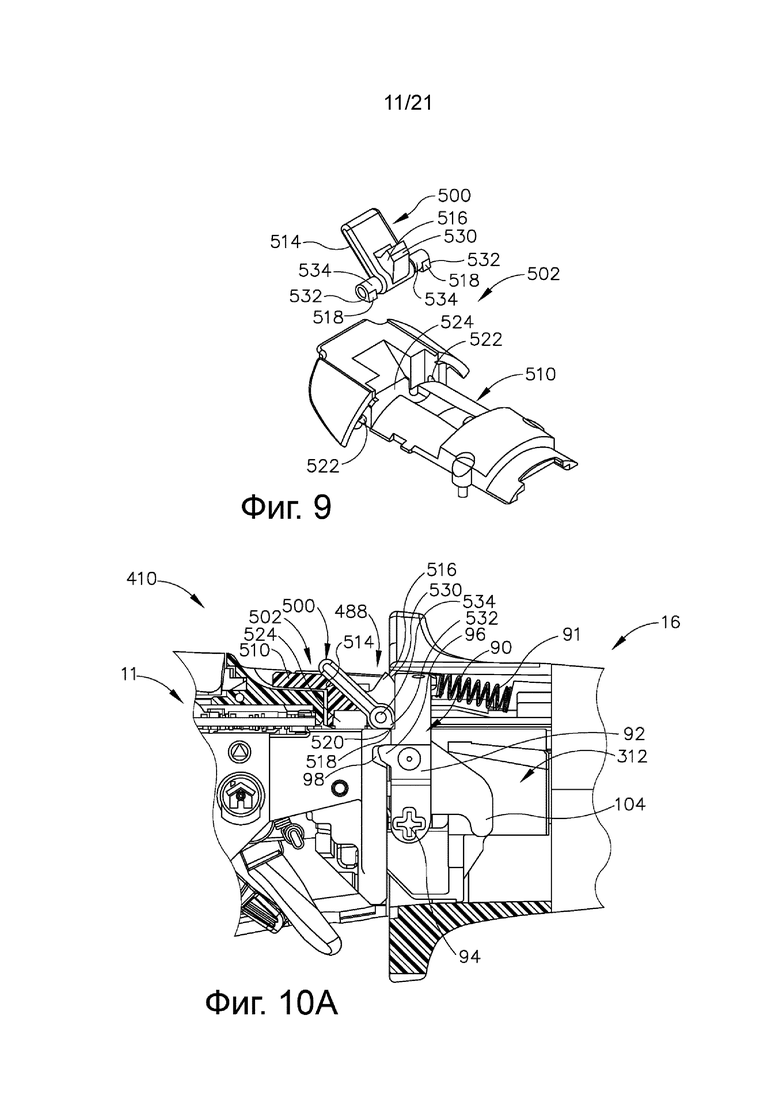
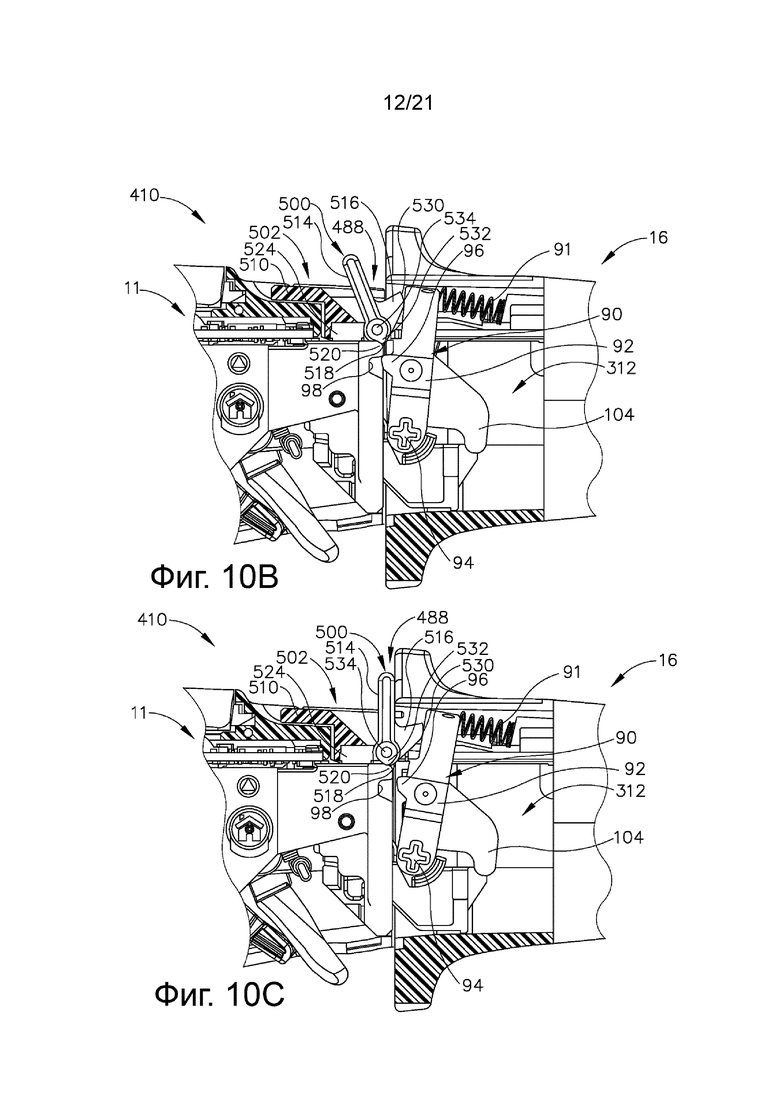
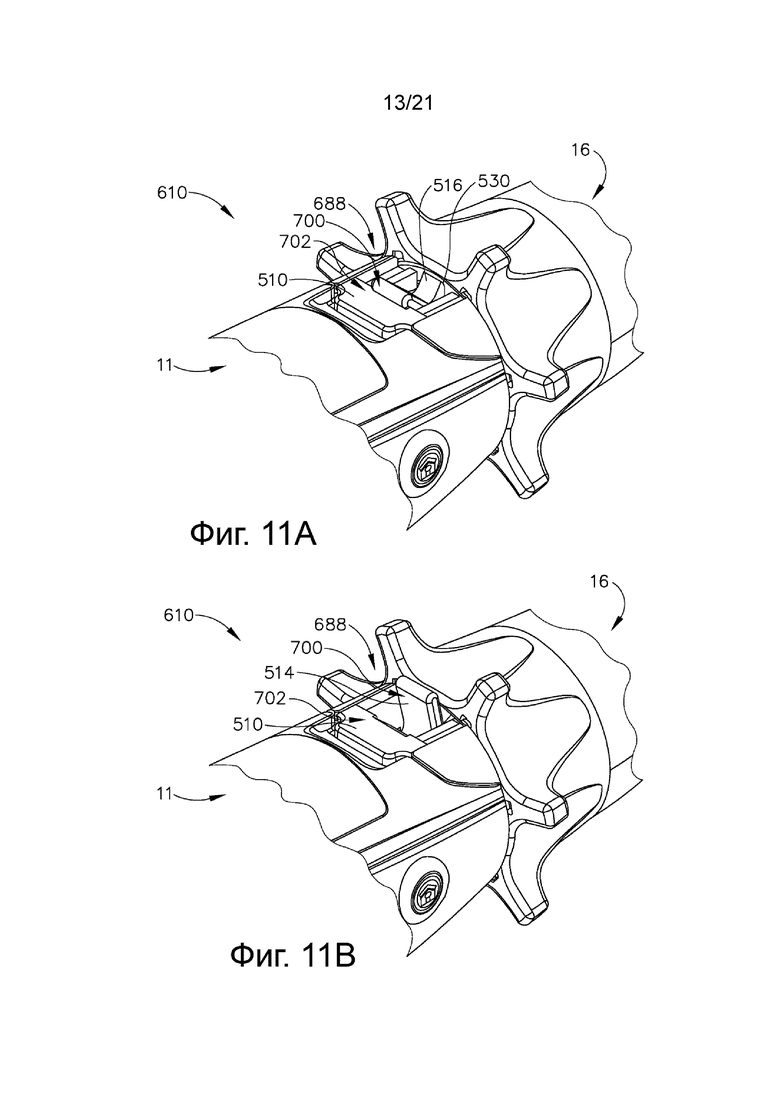
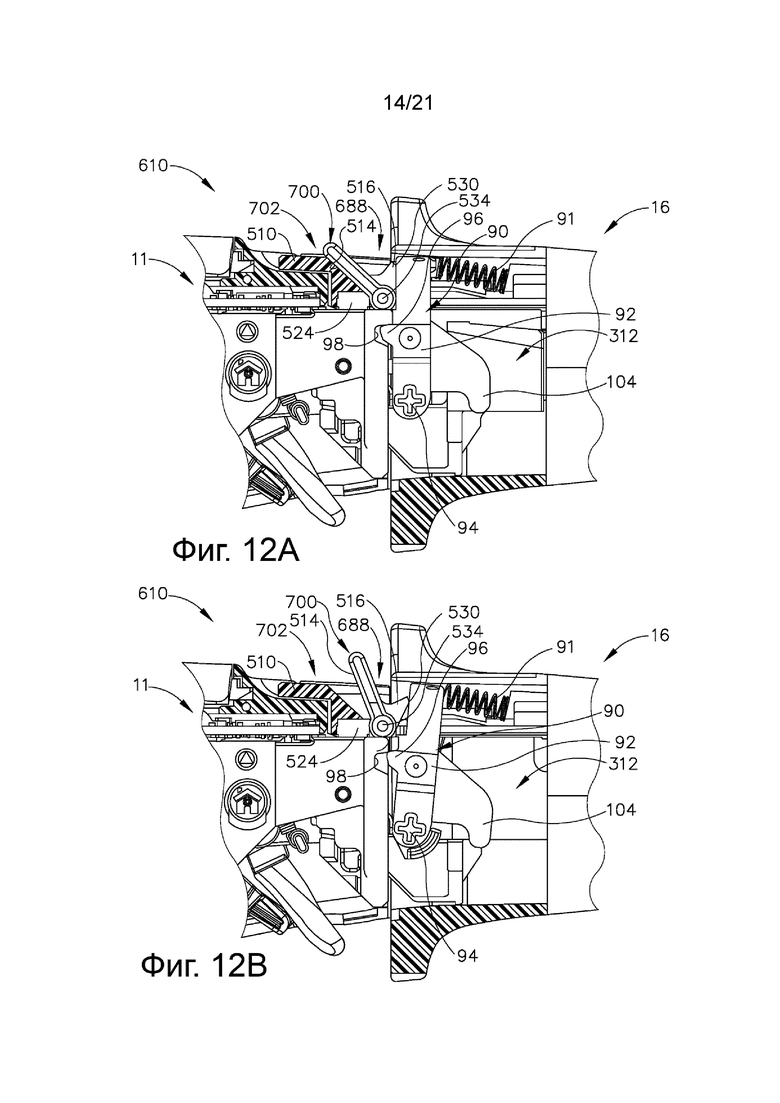
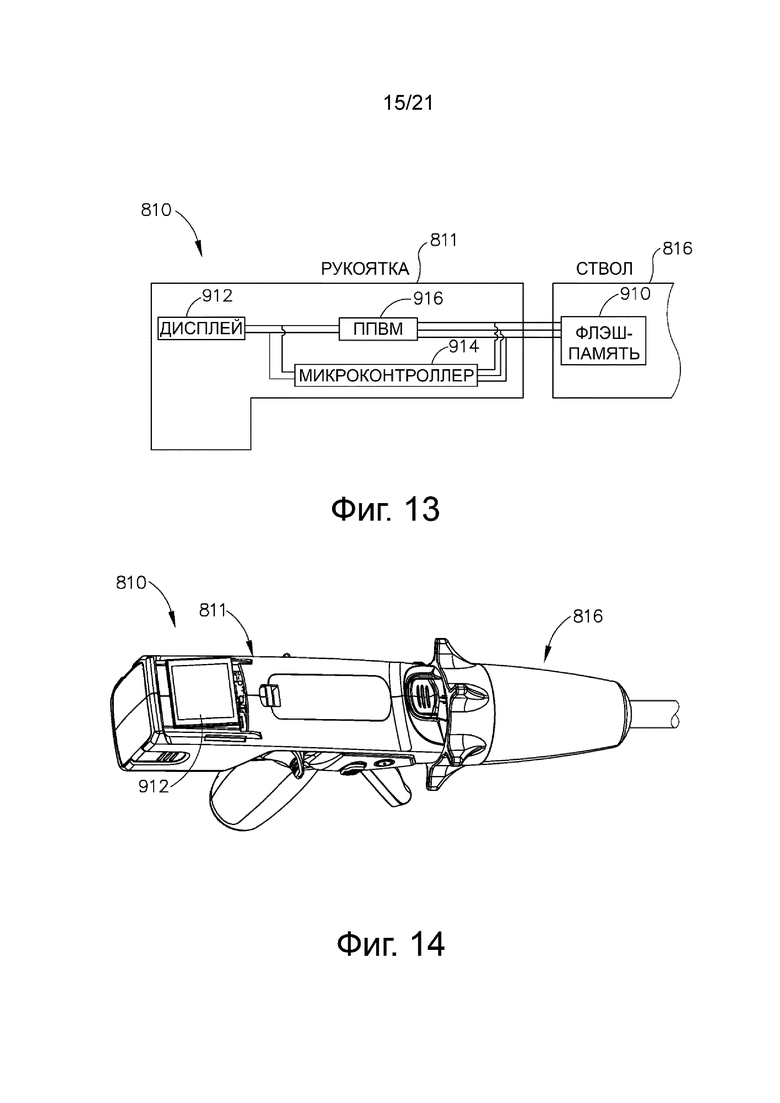
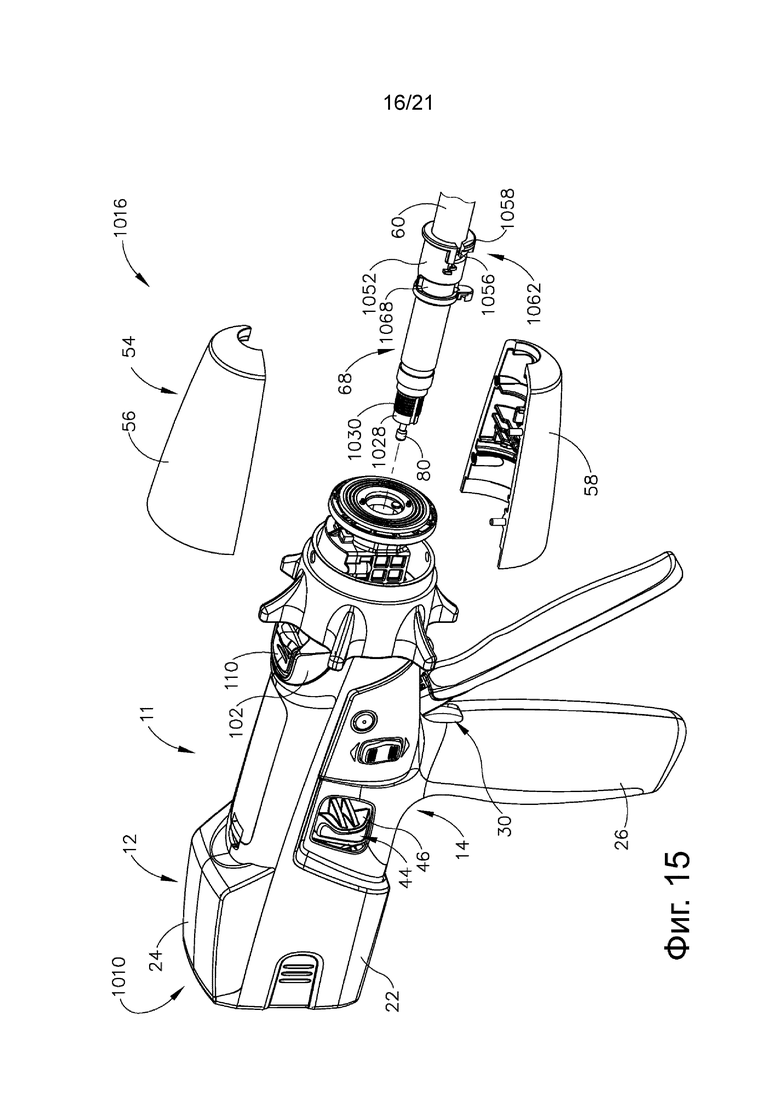
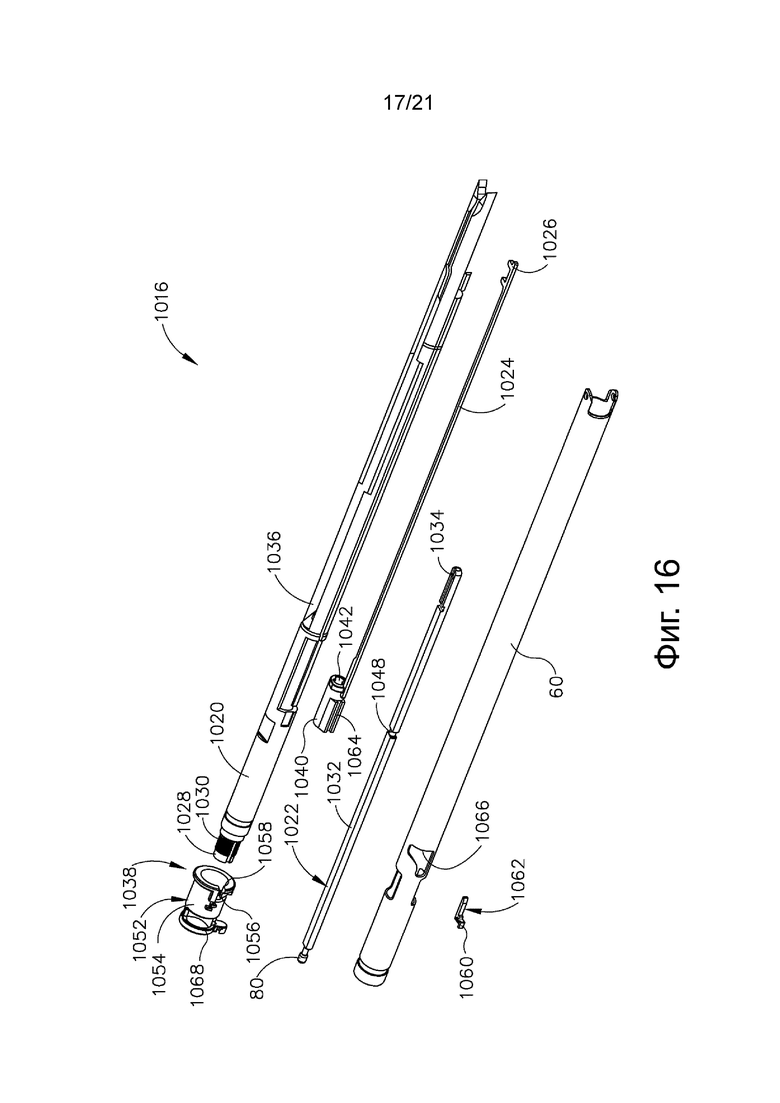
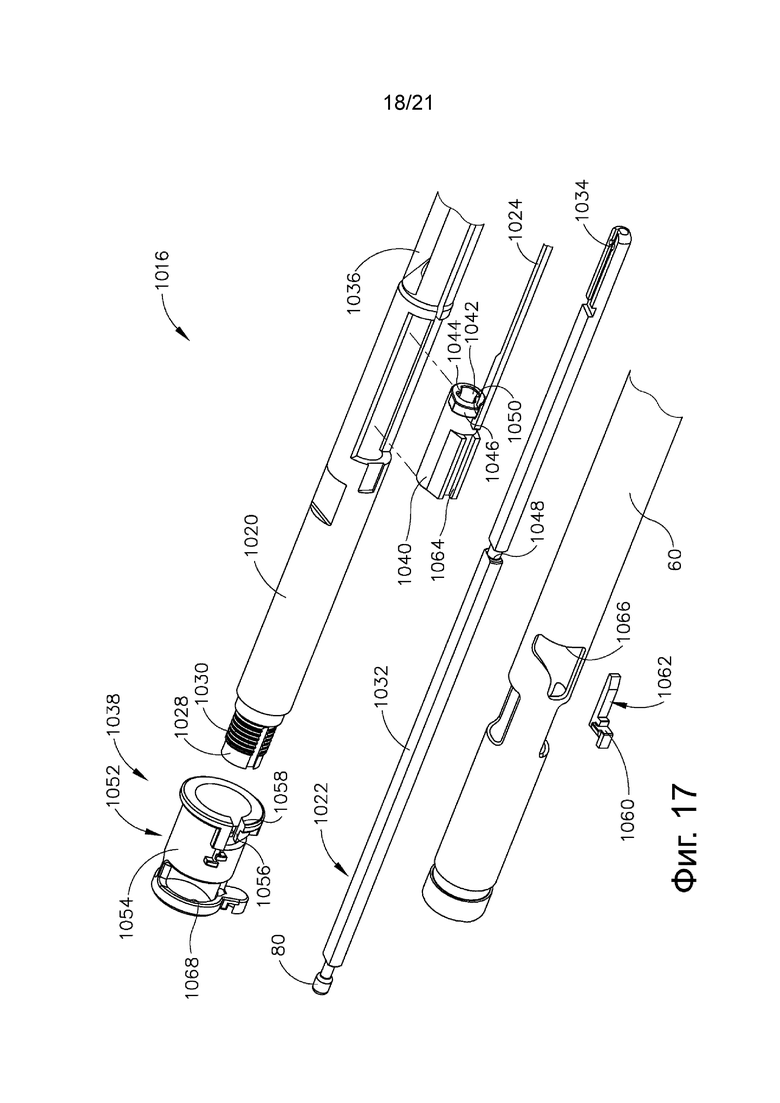
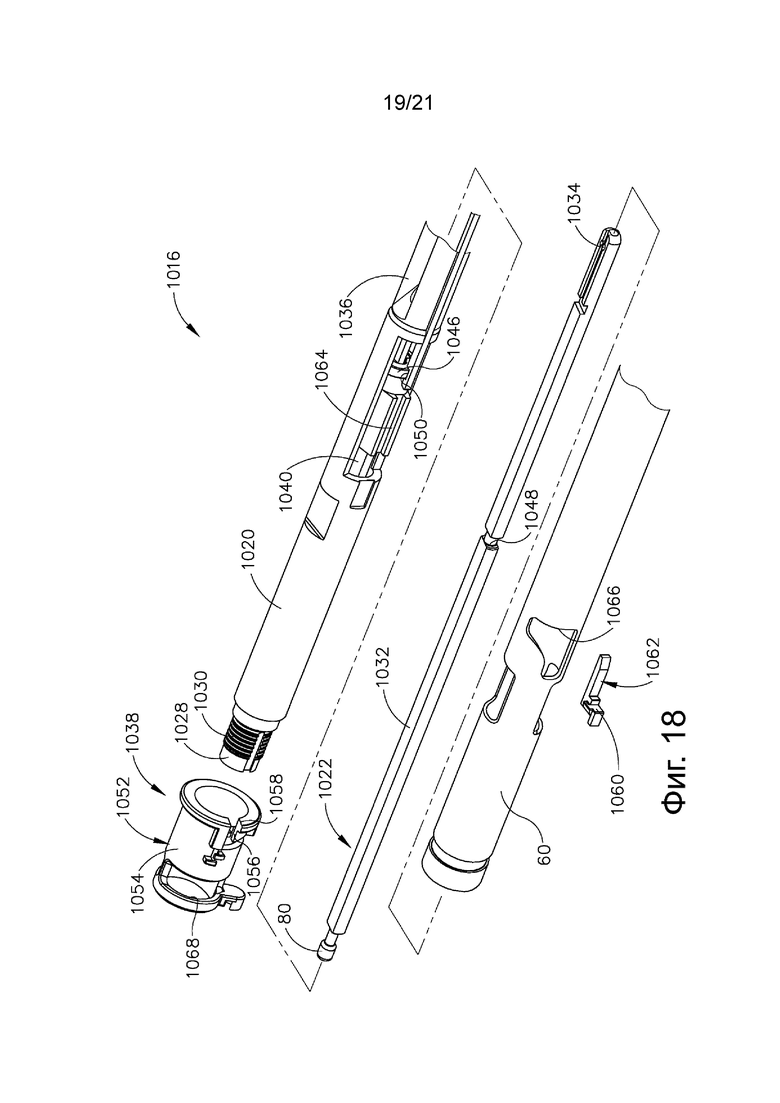
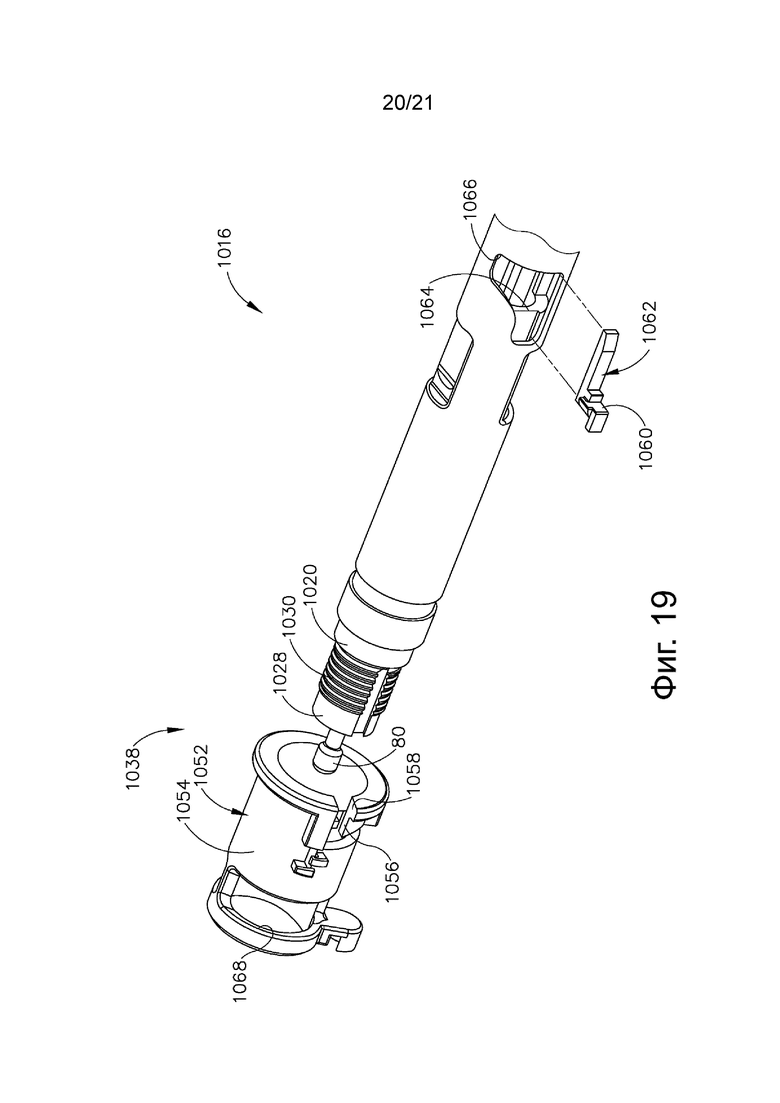
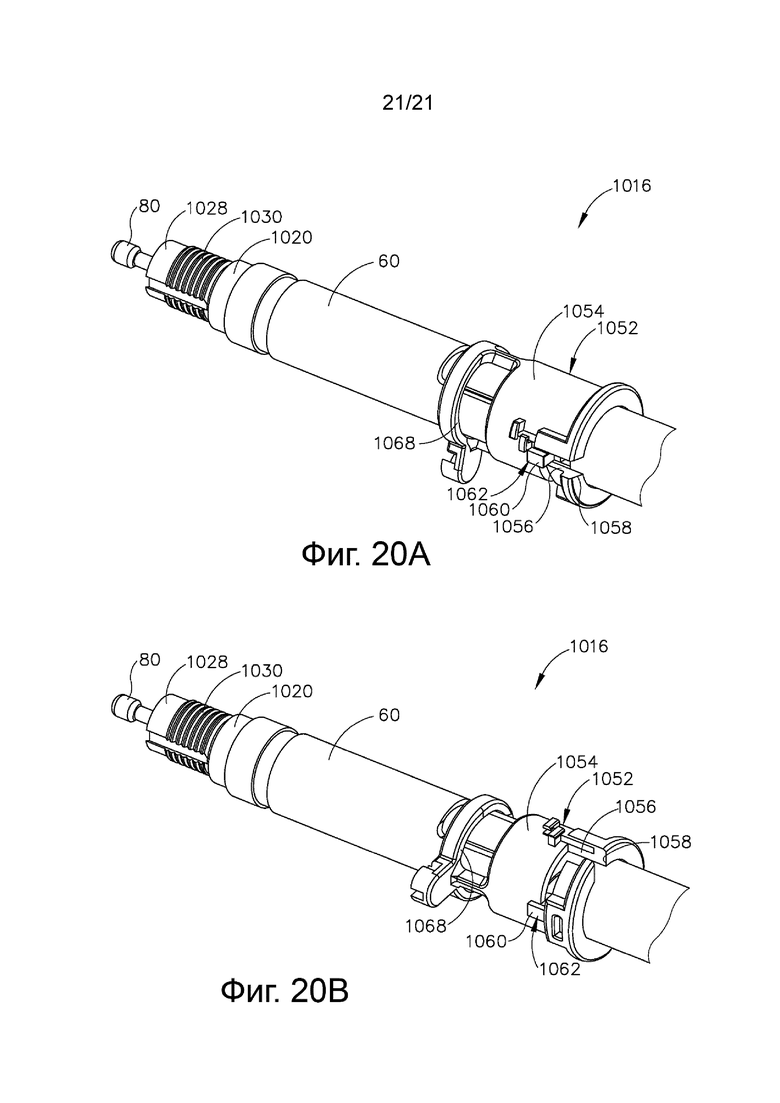
Группа изобретений относится к медицине, а именно к хирургическим сшивающим инструментам. Хирургический инструмент включает в себя узел ствола, узел рукоятки и систему фиксации, выполненную с возможностью функционального соединения узлов рукоятки и ствола. Система фиксации включает в себя блокирующие элементы ствола и рукоятки, соответственно соединенные с узлами ствола и рукоятки для предотвращения функционального отсоединения узлов ствола и рукоятки. Фиксирующий элемент имеет кулачковую поверхность и фиксирующий элемент. Фиксирующий элемент выполнен с возможностью избирательного перемещения из заблокированного положения в разомкнутое положение таким образом, что перемещение фиксирующего элемента приводит к тому, что блокирующие элементы ствола и рукоятки расцепляют и разъединяют узлы ствола и рукоятки. Фиксирующий элемент дополнительно выполнен с возможностью избирательного перемещения из разомкнутого положения в положение для извлечения таким образом, что дальнейшее перемещение фиксирующего элемента приводит к зацеплению кулачковой поверхности фиксирующего элемента с кулачковым основанием и принудительно перемещает узел ствола в направлении для извлечения. Достигается улучшенная конструкция системы фиксации узла ствола с узлом рукоятки. 3 н. и 16 з.п. ф-лы, 31 ил.
1. Хирургический инструмент, содержащий:
(a) узел ствола, имеющий дистальный концевой участок и проксимальный концевой участок, причем проксимальный концевой участок включает в себя концевой эффектор, выступающий из него в дистальном направлении;
(b) узел рукоятки, выполненный с возможностью размещения в нем проксимального концевого участка узла ствола; и
(c) систему фиксации, выполненную с возможностью функционального соединения узла ствола с узлом рукоятки, причем система фиксации включает в себя:
(i) блокирующий элемент ствола, соединенный с узлом ствола,
(ii) блокирующий элемент рукоятки, соединенный с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки,
(iii) кулачковое основание и
(iv) фиксирующий элемент, причем фиксирующий элемент имеет кулачковую поверхность, выполненную с возможностью зацепления с кулачковым основанием,
при этом фиксирующий элемент выполнен с возможностью избирательного перемещения из фиксированного положения в разомкнутое положение таким образом, что перемещение фиксирующего элемента в разблокированное положение приводит к отделению блокирующего элемента ствола от блокирующего элемента рукоятки и тем самым функциональному отсоединению узла ствола от узла рукоятки в разомкнутом положении,
причем фиксирующий элемент дополнительно выполнен с возможностью избирательного перемещения из разомкнутого положения в положение для извлечения таким образом, что перемещение фиксирующего элемента в направлении положения для извлечения приводит к зацеплению кулачковой поверхности фиксирующего элемента с кулачковым основанием и, вследствие этого, к принудительному перемещению узла ствола в положение для извлечения относительно узла рукоятки для указания пользователю направления для извлечения.
2. Хирургический инструмент по п. 1, в котором фиксирующий элемент выполнен с возможностью входить в зацепление по меньшей мере с одним из блокирующих элементов ствола и рукоятки и тем самым приводить к расцеплению блокирующего элемента ствола от блокирующего элемента рукоятки по мере перемещения фиксирующего элемента из разблокированного положения в направлении разомкнутого положения.
3. Хирургический инструмент по п. 2, в котором узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент.
4. Хирургический инструмент по п. 3, в котором фиксирующий элемент узла ствола выполнен с возможностью вступать в зацепление с блокирующим элементом ствола и тем самым приводить к отделению блокирующего элемента ствола от блокирующего элемента рукоятки по мере перемещения фиксирующего элемента из разблокированного положения в разомкнутое положение.
5. Хирургический инструмент по п. 4, в котором блокирующий элемент рукоятки жестко соединен с узлом рукоятки, а блокирующий элемент ствола выполнен в форме блокирующей вилки ствола, соединенной с узлом ствола с возможностью поворота таким образом, что блокирующая вилка выполнена с возможностью смещения для зацепления с блокирующим элементом рукоятки.
6. Хирургический инструмент по п. 1, в котором узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент, причем фиксирующий элемент содержит кнопку фиксации, при этом кнопка фиксации установлена с возможностью скольжения на проксимальном концевом участке узла ствола таким образом, что кнопка фиксации выполнена с возможностью скольжения из заблокированного положения в направлении положения для извлечения.
7. Хирургический инструмент по п. 6, в котором кнопка фиксации включает в себя дистальный выступ, выполненный с возможностью входить в зацепление с блокирующим элементом ствола для расцепления от блокирующего элемента рукоятки.
8. Хирургический инструмент по п. 6, в котором кулачковая поверхность кнопки фиксации выполнена в форме кулачковой поверхности с понижающимся уклоном, выполненной с возможностью скользить в поперечном направлении вдоль кулачкового основания, таким образом принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки.
9. Хирургический инструмент по п. 6, в котором система фиксации дополнительно включает в себя узел крепления фиксатора, жестко соединенный с его проксимальным концевым участком, причем узел крепления фиксатора выполнен с возможностью поперечного захвата кнопки фиксации, при этом кнопка фиксации выполнена с возможностью скольжения относительно узла крепления фиксатора из заблокированного положения в направлении положения для извлечения.
10. Хирургический инструмент по п. 9, в котором узел крепления фиксатора включает проходящее через него отверстие, причем отверстие выполнено с возможностью обеспечения непосредственного контакта между кулачковым основанием и кулачковой поверхностью кнопки фиксации через него.
11. Хирургический инструмент по п. 1, в котором узел рукоятки включает в себя кулачковое основание, а узел ствола включает в себя фиксирующий элемент, причем фиксирующий элемент содержит переключатель фиксации, при этом переключатель фиксации установлен на проксимальном концевом участке узла ствола с возможностью поворота таким образом, что переключатель фиксации выполнен с возможностью поворота из заблокированного положения в направлении положения для извлечения.
12. Хирургический инструмент по п. 11, в котором переключатель фиксации включает в себя дистальный выступ, выполненный с возможностью входить в зацепление с блокирующим элементом ствола для расцепления от блокирующего элемента рукоятки.
13. Хирургический инструмент по п. 11, в котором кулачковая поверхность переключателя фиксации выполнена в форме поверхности кулачкового выступа, выполненной с возможностью скользить вдоль кулачкового основания с возможностью поворота, тем самым принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки.
14. Хирургический инструмент по п. 11, в котором система фиксации дополнительно включает в себя узел крепления фиксатора, жестко соединенный с его проксимальным концевым участком, причем узел крепления фиксатора выполнен с возможностью размещения переключателя фиксации таким образом, что переключатель фиксации выполнен с возможностью поворота относительно узла крепления фиксатора из заблокированного положения в направлении положения для извлечения.
15. Хирургический инструмент по п. 14, в котором узел крепления фиксатора включает в себя проходящее через него отверстие, причем отверстие выполнено с возможностью обеспечения непосредственного контакта между кулачковым основанием и кулачковой поверхностью переключателя фиксации через него.
16. Хирургический инструмент, содержащий:
(a) узел ствола, имеющий дистальный концевой участок и проксимальный концевой участок, причем проксимальный концевой участок включает в себя концевой эффектор, выступающий из него в дистальном направлении;
(b) узел рукоятки, выполненный с возможностью размещения в нем проксимального концевого участка узла ствола; и
(c) систему фиксации, выполненную с возможностью функционального соединения узла ствола с узлом рукоятки, причем система фиксации включает в себя:
(i) блокирующий элемент ствола, соединенный с узлом ствола,
(ii) блокирующий элемент рукоятки, соединенный с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки, и
(iii) кулачковое основание,
(iv) переключатель фиксации, выполненный с возможностью избирательного поворота из заблокированного положения в разомкнутое положение таким образом, что перемещение переключателя фиксации в разблокированное положение приводит к отделению блокирующего элемента ствола от блокирующего элемента рукоятки и тем самым функциональному отсоединению узла ствола от узла рукоятки в разомкнутом положении, причем переключатель фиксации включает поверхность кулачкового выступа, причем поверхность кулачкового выступа выполнена с возможностью скользить с возможностью поворота вдоль кулачкового основания, тем самым принудительно перемещая узел ствола в направлении для извлечения относительно узла рукоятки из разомкнутого положения в направлении положения для извлечения для указания пользователю направления извлечения.
17. Способ извлечения узла ствола из узла рукоятки хирургического инструмента, причем хирургический инструмент имеет систему фиксации, содержащую блокирующий элемент ствола, блокирующий элемент рукоятки, кулачковое основание и фиксирующий элемент, при этом блокирующий элемент ствола соединен с узлом ствола, блокирующий элемент рукоятки соединен с узлом рукоятки, причем блокирующий элемент рукоятки выполнен с возможностью зацепления блокирующего элемента ствола и препятствования функциональному отсоединению узла ствола от узла рукоятки, а элемент фиксации имеет кулачковую поверхность, выполненную с возможностью зацепления с кулачковым основанием, при этом способ включает:
(a) перемещение фиксирующего элемента из заблокированного положения в направлении разомкнутого положения для расцепления блокирующего элемента ствола от блокирующего элемента рукоятки в разомкнутом положении;
(b) функциональное отсоединение узла ствола от узла рукоятки;
(c) перемещение фиксирующего элемента из разомкнутого положения в направлении положения для извлечения; и
(d) зацепление кулачковой поверхности узла ствола с кулачковым основанием для принудительного перемещения узла ствола в направлении извлечения относительно узла рукоятки для извлечения узла ствола из узла рукоятки.
18. Способ по п. 17, в котором фиксирующий элемент содержит кнопку фиксации, а перемещение кнопки фиксации дополнительно предусматривает скольжение кнопки фиксации.
19. Способ по п. 17, в котором фиксирующий элемент содержит переключатель фиксации, а перемещение кнопки фиксации дополнительно предусматривает поворот переключателя фиксации.
| WO 2008073362 A2, 19.06.2008 | |||
| ХИРУРГИЧЕСКИЙ СТЕПЛЕР ДЛЯ НАЛОЖЕНИЯ П-ОБРАЗНОЙ СКОБКИ | 2005 |
|
RU2306107C2 |
| WO 2007038538 A1, 05.04.2007 | |||
| US 5718714 A1, 17.02.1998 | |||
| US 5174300 A1, 29.12.1992. | |||

