ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к хирургическим инструментам и в различных вариантах осуществления к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами.
Сшивающий инструмент может включать в себя две взаимодействующие удлиненные бранши, каждая из которых может быть выполнена с возможностью введения в тело пациента и расположения относительно сшиваемой и/или разрезаемой ткани. В различных вариантах осуществления одна из бранш может поддерживать кассету со скобами с, по меньшей мере, двумя содержащимися в ней рядами скоб, расположенными в боковом направлении, а другая бранша может поддерживать упор с формирующими скобу углублениями, совмещенными с рядами скоб в кассете со скобами. По существу сшивающий инструмент может дополнительно включать в себя стержень-толкатель и лезвие скальпеля, которые выполнены с возможностью скольжения относительно бранш для последовательного выталкивания скоб из кассеты со скобами посредством кулачковых поверхностей на стержне-толкателе и/или кулачковых поверхностей на клиновидных салазках, которые проталкиваются стержнем-толкателем. В, по меньшей мере, одном варианте осуществления кулачковые поверхности могут быть выполнены с возможностью активации множества выталкивателей скоб, находящихся в кассете и связанных со скобами, чтобы проталкивать скобы к упору и формировать расположенные в боковом направлении ряды деформированных скоб в ткани, зажатой между браншами. В, по меньшей мере, одном варианте осуществления лезвие скальпеля может следовать по кулачковым поверхностям и разрезать ткань вдоль линии между рядами скоб. Примеры подобных сшивающих инструментов описаны в патенте США № 7,794,475, озаглавленном SURGICAL STAPLES HAVING COMPRESSIBLE OR CRUSHABLE MEMBERS FOR SECURING TISSUE THEREIN AND STAPLING INSTRUMENTS FOR DEPLOYING THE SAME, полное описание которого включено в настоящий документ путем ссылки.
Изложенное выше описание предназначено лишь для иллюстрации различных аспектов соответствующей технологии в области применения изобретения в настоящее время, и его не следует рассматривать как ограничение объема формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Различные элементы вариантов осуществления, описанные в настоящем документе, наряду с их преимуществами, могут быть понятны после изучения представленного ниже описания вместе с сопроводительными чертежами, на которых:
на ФИГ. 1 представлен вид в перспективе хирургического сшивающего инструмента в соответствии с, по меньшей мере, одним вариантом осуществления, содержащего рукоятку, проходящий из рукоятки ствол, концевой эффектор и шарнирное сочленение, соединяющее с возможностью вращения концевой эффектор со стволом;
на ФИГ. 2 представлен частичный вид в вертикальной проекции узла ствола для использования с рукояткой изображенного на ФИГ. 1 хирургического сшивающего инструмента, представленного в зафиксированной конфигурации и представленного с удалением компонентов в целях наглядности;
на ФИГ. 3 представлен частичный вид в вертикальной проекции узла ствола, изображенного на ФИГ. 2, в незафиксированной конфигурации;
на ФИГ. 4 представлен частичный вид в вертикальной проекции изображенного на ФИГ. 2 узла ствола, отделенного от рукоятки, изображенной на ФИГ. 1;
на ФИГ. 5 представлен частичный вид в перспективе изображенного на ФИГ. 1 узла ствола, функционально связанного с рукояткой в соответствии с, по меньшей мере, одним вариантом осуществления;
на ФИГ. 6 представлен подробный вид взаимного соединения между изображенным на ФИГ. 1 узлом ствола и изображенной на ФИГ. 5 рукояткой;
на ФИГ. 7 представлен вид в перспективе системы защелки изображенного на ФИГ. 1 узла ствола, показанной в зафиксированной конфигурации;
на ФИГ. 8 представлен вид с пространственным разделением компонентов системы защелки, изображенной на ФИГ. 7;
на ФИГ. 9 представлен вид в перспективе в поперечном сечении изображенной на ФИГ. 7 системы защелки в защелкнутой, но незаблокированной конфигурации;
на ФИГ. 10 представлен вид в перспективе в поперечном сечении изображенной на ФИГ. 7 системы защелки в защелкнутой и заблокированной конфигурации;
на ФИГ. 11 представлен вид в вертикальной проекции в поперечном сечении рукоятки и узла ствола системы хирургического инструмента, содержащей переключаемую трансмиссию в соответствии с, по меньшей мере, одним вариантом осуществления трансмиссии, функционально связанной с системой шарнирного сочленения, выполненной с возможностью шарнирного поворота концевого эффектора;
на ФИГ. 12 представлен вид в вертикальной проекции в поперечном сечении изображенных на ФИГ. 11 рукоятки и узла ствола, иллюстрирующий трансмиссию, функционально связанную с пусковой системой, выполненной с возможностью управления концевым эффектором;
на ФИГ. 13 представлен вид в вертикальной проекции в поперечном сечении рукоятки и узла ствола системы хирургического инструмента, содержащей переключаемую трансмиссию в соответствии с, по меньшей мере, одним вариантом осуществления трансмиссии, функционально связанной с системой шарнирного сочленения, выполненной с возможностью шарнирного поворота концевого эффектора;
на ФИГ. 14 представлен вид в вертикальной проекции в поперечном сечении изображенных на ФИГ. 13 рукоятки и узла ствола, иллюстрирующий трансмиссию, функционально связанную с приводной системой, выполненной с возможностью управления концевым эффектором;
на ФИГ. 15 представлен вид в поперечном сечении трансмиссии, изображенной на ФИГ. 13;
на ФИГ. 16 представлен частичный вид в поперечном сечении узла ствола, прикрепленного к рукоятке системы хирургического инструмента, включающий в себя трансмиссию, переключаемую между рабочим режимом шарнирного поворота и рабочим режимом пуска в соответствии с, по меньшей мере, одним вариантом осуществления;
на ФИГ. 17 представлен вид в вертикальной проекции изображенной на ФИГ. 16 трансмиссии в рабочем режиме шарнирного поворота;
на ФИГ. 18 представлен вид в вертикальной проекции изображенной на ФИГ. 16 трансмиссии в рабочем режиме пуска;
на ФИГ. 19 представлен частичный вид в поперечном сечении узла ствола, прикрепленного к рукоятке системы хирургического инструмента в соответствии с, по меньшей мере, одним вариантом осуществления;
на ФИГ. 20 представлен вид в перспективе вводного исполнительного механизма и трансмиссии, выполненных с возможностью переключения узла ствола между рабочим режимом шарнирного поворота и рабочим режимом пуска в соответствии с, по меньшей мере, одним вариантом осуществления;
на ФИГ. 21 представлен вид с пространственным разделением компонентов вводного исполнительного механизма и трансмиссии, изображенной на ФИГ. 20, а также исполнительного механизма шарнирного сочленения и пускового исполнительного механизма узла ствола;
на ФИГ. 22 представлен вид в перспективе в поперечном сечении вводного исполнительного механизма в сборе с изображенной на ФИГ. 20 трансмиссией, иллюстрирующий зацепление стопорного кольца трансмиссии с исполнительным механизмом шарнирного сочленения и пусковым исполнительным механизмом узла ствола;
на ФИГ. 23 представлен вид в поперечном сечении в вертикальной проекции вводного исполнительного механизма, отсоединенного от трансмиссии, изображенной на ФИГ. 20;
на ФИГ. 23А представлен вид в поперечном сечении изображенной на ФИГ. 20 трансмиссии по изображенной на ФИГ. 23 линии 23А-23А, иллюстрирующий зацепление стопорного кольца трансмиссии с исполнительным механизмом шарнирного сочленения и пусковым исполнительным механизмом узла ствола;
на ФИГ. 23В представлен вид с торца изображенной на ФИГ. 20 трансмиссии, иллюстрирующий стопорное кольцо в конфигурации, изображенной на ФИГ. 23 и 23А;
на ФИГ. 24 представлен вид в поперечном сечении в вертикальной проекции вводного исполнительного механизма в сборе с изображенной на ФИГ. 20 трансмиссией, иллюстрирующий трансмиссию в рабочем режиме шарнирного поворота;
на ФИГ. 24А представлен вид в поперечном сечении изображенной на ФИГ. 20 трансмиссии по изображенной на ФИГ. 24 линии 24А-24А, иллюстрирующий, во-первых, зацепление стопорного кольца трансмиссии с исполнительным механизмом шарнирного сочленения и пусковым исполнительным механизмом узла ствола и, во-вторых, пусковой исполнительный механизм, соединенный с вводным исполнительным механизмом посредством стопорного кольца;
на ФИГ. 24В представлен вид с торца изображенной на ФИГ. 20 трансмиссии, иллюстрирующий стопорное кольцо в конфигурации, изображенной на ФИГ. 24 и 24А;
на ФИГ. 25 представлен вид в поперечном сечении в вертикальной проекции вводного исполнительного механизма в сборе с трансмиссией, изображенной на ФИГ. 20, иллюстрирующий трансмиссию в рабочем режиме пуска;
на ФИГ. 25А представлен вид в поперечном сечении изображенной на ФИГ. 20 трансмиссии по изображенной на ФИГ. 25 линии 25А-25А, иллюстрирующий, во-первых, зацепление стопорного кольца трансмиссии с пусковым исполнительным механизмом узла ствола без зацепления с исполнительным механизмом шарнирного сочленения узла ствола и, во-вторых, пусковой исполнительный механизм, соединенный с вводным исполнительным механизмом устройства ввода посредством стопорного кольца;
на ФИГ. 25В представлен вид с торца изображенной на ФИГ. 20 трансмиссии, иллюстрирующий стопорное кольцо в конфигурации, изображенной на ФИГ. 25 и 25А;
на ФИГ. 26 представлен вид в поперечном сечении узла ствола для применения с хирургическим инструментом в соответствии с, по меньшей мере, одним вариантом осуществления;
на ФИГ. 27 представлен вид в поперечном сечении в горизонтальной проекции узла ствола, изображенного на ФИГ. 26;
на ФИГ. 28 представлен вид в поперечном сечении в вертикальной проекции узла ствола, изображенного на ФИГ. 26;
на ФИГ. 29 представлен вид с торца узла ствола, изображенного на ФИГ. 26;
на ФИГ. 30 представлен частичный вид в поперечном сечении рукоятки хирургического инструмента;
на ФИГ. 31 представлен вид с торца рукоятки, изображенной на ФИГ. 30;
на ФИГ. 32 представлен вид в поперечном сечении в горизонтальной проекции узла ствола, изображенного на ФИГ. 26, и рукоятки, изображенной на ФИГ. 30, в разобранном состоянии;
на ФИГ. 33 представлен вид в поперечном сечении в горизонтальной проекции узла ствола, изображенного на ФИГ. 26, собранного с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 34 представлен вид в поперечном сечении в вертикальной проекции узла ствола, изображенного на ФИГ. 26, собранного с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 35 представлен вид в поперечном сечении с торца узла ствола, изображенного на ФИГ. 26, готового к сборке с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 36 представлен вид в поперечном сечении с торца узла ствола, изображенного на ФИГ. 26, в процессе сборки с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 37 представлен вид в поперечном сечении с торца узла ствола, изображенного на ФИГ. 26, почти собранного с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 38 представлен вид в поперечном сечении с торца узла ствола, изображенного на ФИГ. 26, собранного с рукояткой, изображенной на ФИГ. 30;
на ФИГ. 39 представлен вид в перспективе трансмиссии хирургического инструмента, выполненной с возможностью переключения между первым рабочим режимом и вторым рабочим режимом; и
на ФИГ. 40 представлен вид в перспективе изображенной на ФИГ. 39 трансмиссии, переключенной во второй рабочий режим.
Соответствующие элементы на разных видах обозначаются соответствующими условными обозначениями. Иллюстративные примеры, представленные в данном документе, демонстрируют различные варианты осуществления настоящего изобретения в одной из его форм. Эти иллюстративные примеры не должны истолковываться как ограничивающие объем изобретения каким-либо образом.
ПОДРОБНОЕ ОПИСАНИЕ
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные в тот же день, каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № _________, озаглавленная SURGICAL INSTRUMENT SYSTEMS COMPRISING AN ARTICULATABLE END EFFECTOR AND MEANS FOR ADJUSTING THE FIRING STROKE OF A FIRING MEMBER; досье патентного поверенного № END7415USNP/140289;
- заявка на патент США № _______, озаглавленная DRIVE ARRANGEMENTS FOR ARTICULATABLE SURGICAL INSTRUMENTS, досье патентного поверенного № END7418USNP/140292;
- заявка на патент США № _______, озаглавленная LOCKING ARRANGEMENTS FOR DETACHABLE SHAFT ASSEMBLIES WITH ARTICULATABLE SURGICAL END EFFECTORS, досье патентного поверенного № END7417USNP/140293;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT WITH AN ANVIL THAT IS SELECTIVELY MOVABLE ABOUT A DISCRETE NON-MOVABLE AXIS RELATIVE TO A STAPLE CARTRIDGE, досье патентного поверенного № END7485USNP/140295;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENTS WITH IMPROVED CLOSURE ARRANGEMENTS; досье патентного поверенного № END7486/140296;
- заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND MOVABLE FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7489USNP/140299;
- заявка на патент США № __________, озаглавленная SURGICAL INSTRUMENTS WITH ARTICULATABLE END EFFECTORS AND IMPROVED FIRING BEAM SUPPORT ARRANGEMENTS, досье патентного поверенного № END7491USNP/140301;
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A FLEXIBLE ARTICULATION SYSTEM; досье патентного поверенного № END7492USNP/140302; и
- заявка на патент США № _______, озаглавленная SURGICAL INSTRUMENT ASSEMBLY COMPRISING A LOCKABLE ARTICULATION SYSTEM; досье патентного поверенного № END7494USNP/140304.
Заявителю настоящей заявки принадлежат представленные ниже заявки на патенты, поданные 1 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/782,295, озаглавленная ARTICULATABLE SURGICAL INSTRUMENTS WITH CONDUCTIVE PATHWAYS FOR SIGNAL COMMUNICATION, в настоящее время публикация заявки на патент США № 2014/0246471;
- заявка на патент США № 13/782,323, озаглавленная ROTARY POWERED ARTICULATION JOINTS FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0246472;
- заявка на патент США № 13/782,338, озаглавленная THUMBWHEEL SWITCH ARRANGEMENTS FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0249557;
- заявка на патент США № 13/782,499, озаглавленная ELECTROMECHANICAL SURGICAL DEVICE WITH SIGNAL RELAY ARRANGEMENT, в настоящее время публикация заявки на патент США № 2014/0246474;
- заявка на патент США № 13/782,460, озаглавленная MULTIPLE PROCESSOR MOTOR CONTROL FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0246478;
- заявка на патент США № 13/782,358, озаглавленная JOYSTICK SWITCH ASSEMBLIES FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0246477;
- заявка на патент США № 13/782,481, озаглавленная SENSOR STRAIGHTENED END EFFECTOR DURING REMOVAL THROUGH TROCAR, в настоящее время публикация заявки на патент США № 2014/0246479;
- заявка на патент США № 13/782,518, озаглавленная CONTROL METHODS FOR SURGICAL INSTRUMENTS WITH REMOVABLE IMPLEMENT PORTIONS, в настоящее время публикация заявки на патент США № 2014/0246475;
- заявка на патент США № 13/782,375, озаглавленная ROTARY POWERED SURGICAL INSTRUMENTS WITH MULTIPLE DEGREES OF FREEDOM, в настоящее время публикация заявки на патент США № 2014/0246473; и
- заявка на патент США № 13/782,536, озаглавленная SURGICAL INSTRUMENT SOFT STOP, в настоящее время публикация заявки на патент США № 2014/0246476.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 14 марта 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 13/803,097, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE, в настоящее время публикация заявки на патент США № 2014/0263542;
- заявка на патент США № 13/803,193, озаглавленная CONTROL ARRANGEMENTS FOR A DRIVE MEMBER OF A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263537;
- заявка на патент США № 13/803,053, озаглавленная INTERCHANGEABLE SHAFT ASSEMBLIES FOR USE WITH A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263564;
- заявка на патент США № 13/803,086, озаглавленная ARTICULATABLE SURGICAL INSTRUMENT COMPRISING AN ARTICULATION LOCK, в настоящее время публикация заявки на патент США № 2014/0263541;
- заявка на патент США № 13/803,210, озаглавленная SENSOR ARRANGEMENTS FOR ABSOLUTE POSITIONING SYSTEM FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263538;
- заявка на патент США № 13/803,148, озаглавленная MULTI-FUNCTION MOTOR FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0263554;
- заявка на патент США № 13/803,066, озаглавленная DRIVE SYSTEM LOCKOUT ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263565;
- заявка на патент США № 13/803,117, озаглавленная ARTICULATION CONTROL SYSTEM FOR ARTICULATABLE SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263553;
- заявка на патент США № 13/803,130, озаглавленная DRIVE TRAIN CONTROL ARRANGEMENTS FOR MODULAR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263543; и
- заявка на патент США № 13/803,159, озаглавленная METHOD AND SYSTEM FOR OPERATING A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0277017.
Заявителю настоящей заявки принадлежит представленная ниже заявка на патент, поданная 7 марта 2014 г., которая полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/200,111, озаглавленная CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS, в настоящее время публикация заявки на патент США № 2014/0263539.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 26 марта 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
заявка на патент США № 14/226,106, озаглавленная POWER MANAGEMENT CONTROL SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,099, озаглавленная STERILIZATION VERIFICATION CIRCUIT;
заявка на патент США № 14/226,094, озаглавленная VERIFICATION OF NUMBER OF BATTERY EXCHANGES/PROCEDURE COUNT;
заявка на патент США № 14/226,117, озаглавленная POWER MANAGEMENT THROUGH SLEEP OPTIONS OF SEGMENTED CIRCUIT AND WAKE UP CONTROL;
заявка на патент США № 14/226,075, озаглавленная MODULAR POWERED SURGICAL INSTRUMENT WITH DETACHABLE SHAFT ASSEMBLIES;
заявка на патент США № 14/226,093, озаглавленная FEEDBACK ALGORITHMS FOR MANUAL BAILOUT SYSTEMS FOR SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,116, озаглавленная SURGICAL INSTRUMENT UTILIZING SENSOR ADAPTATION;
заявка на патент США № 14/226,071, озаглавленная SURGICAL INSTRUMENT CONTROL CIRCUIT HAVING A SAFETY PROCESSOR;
заявка на патент США № 14/226,097, озаглавленная SURGICAL INSTRUMENT COMPRISING INTERACTIVE SYSTEMS;
заявка на патент США № 14/226,126, озаглавленная INTERFACE SYSTEMS FOR USE WITH SURGICAL INSTRUMENTS;
заявка на патент США № 14/226,133, озаглавленная MODULAR SURGICAL INSTRUMENT SYSTEM;
заявка на патент США № 14/226,081, озаглавленная SYSTEMS AND METHODS FOR CONTROLLING A SEGMENTED CIRCUIT;
заявка на патент США № 14/226,076, озаглавленная POWER MANAGEMENT THROUGH SEGMENTED CIRCUIT AND VARIABLE VOLTAGE PROTECTION;
заявка на патент США № 14/226,111, озаглавленная SURGICAL STAPLING INSTRUMENT SYSTEM; и
заявка на патент США № 14/226,125, озаглавленная SURGICAL INSTRUMENT COMPRISING A ROTATABLE SHAFT.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 5 сентября 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/479,103, озаглавленная CIRCUITRY AND SENSORS FOR POWERED MEDICAL DEVICE;
- заявка на патент США № 14/479,119, озаглавленная ADJUNCT WITH INTEGRATED SENSORS TO QUANTIFY TISSUE COMPRESSION;
- заявка на патент США № 14/478,908, озаглавленная MONITORING DEVICE DEGRADATION BASED ON COMPONENT EVALUATION;
- заявка на патент США № 14/478,895, озаглавленная MULTIPLE SENSORS WITH ONE SENSOR AFFECTING A SECOND SENSOR'S OUTPUT OR INTERPRETATION;
- заявка на патент США № 14/479,110, озаглавленная USE OF POLARITY OF HALL MAGNET DETECTION TO DETECT MISLOADED CARTRIDGE;
- заявка на патент США № 14/479,098, озаглавленная SMART CARTRIDGE WAKE UP OPERATION AND DATA RETENTION;
- заявка на патент США № 14/479,115, озаглавленная MULTIPLE MOTOR CONTROL FOR POWERED MEDICAL DEVICE; и
- заявка на патент США № 14/479,108, озаглавленная LOCAL DISPLAY OF TISSUE PARAMETER STABILIZATION.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 9 апреля 2014 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- заявка на патент США № 14/248,590, озаглавленная MOTOR DRIVEN SURGICAL INSTRUMENTS WITH LOCKABLE DUAL DRIVE SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305987;
- заявка на патент США № 14/248,581, озаглавленная SURGICAL INSTRUMENT COMPRISING A CLOSING DRIVE AND A FIRING DRIVE OPERATED FROM THE SAME ROTATABLE OUTPUT, в настоящее время публикация заявки на патент США № 2014/0305989;
- заявка на патент США № 14/248,595, озаглавленная SURGICAL INSTRUMENT SHAFT INCLUDING SWITCHES FOR CONTROLLING THE OPERATION OF THE SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305988;
- заявка на патент США № 14/248,588, озаглавленная POWERED LINEAR SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309666;
- заявка на патент США № 14/248,591, озаглавленная TRANSMISSION ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305991;
- заявка на патент США 14/248,584, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH ALIGNMENT FEATURES FOR ALIGNING ROTARY DRIVE SHAFTS WITH SURGICAL END EFFECTOR SHAFTS, в настоящее время публикация заявки на патент США № 2014/0305994;
- заявка на патент США № 14/248,587, озаглавленная POWERED SURGICAL STAPLER, в настоящее время публикация заявки на патент США № 2014/0309665;
- заявка на патент США № 14/248,586, озаглавленная DRIVE SYSTEM DECOUPLING ARRANGEMENT FOR A SURGICAL INSTRUMENT, в настоящее время публикация заявки на патент США № 2014/0305990; и
- заявка на патент США № 14/248,607, озаглавленная MODULAR MOTOR DRIVEN SURGICAL INSTRUMENTS WITH STATUS INDICATION ARRANGEMENTS, в настоящее время публикация заявки на патент США № 2014/0305992.
Заявителю настоящей заявки также принадлежат представленные ниже заявки на патенты, поданные 16 апреля 2013 г., каждая из которых полностью включена в настоящий документ путем ссылки:
- предварительная заявка на патент США № 61/812,365, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR;
- предварительная заявка на патент США № 61/812,376, озаглавленная LINEAR CUTTER WITH POWER;
- предварительная заявка на патент США № 61/812,382, озаглавленная LINEAR CUTTER WITH MOTOR AND PISTOL GRIP;
- предварительная заявка на патент США № 61/812,385, озаглавленная SURGICAL INSTRUMENT HANDLE WITH MULTIPLE ACTUATION MOTORS AND MOTOR CONTROL; и
- предварительная заявка на патент США № 61/812,372, озаглавленная SURGICAL INSTRUMENT WITH MULTIPLE FUNCTIONS PERFORMED BY A SINGLE MOTOR.
В настоящем документе приведена различная подробная информация, необходимая для понимания общей конструкции, функциональности, особенностей изготовления и применения вариантов осуществления, описание которых предоставлено в спецификации и проиллюстрировано сопроводительными чертежами. Хорошо известные принципы работы, компоненты и элементы не получили в настоящем документе подробного описания, чтобы не затруднять понимание вариантов осуществления, описанных в спецификации. Читатель должен понимать, что варианты осуществления, описанные и проиллюстрированные в настоящем документе, являются не имеющими ограничительного характера примерами. Следует понимать, что определенные конструктивные и функциональные особенности, описанные в данном документе, могут иметь показательный или пояснительный характер. Изменения и модификации вариантов осуществления, описанных и проиллюстрированных в данном документе, могут выполняться в пределах объема формулы изобретения.
Термины «содержать» (и любые его формы, такие как «содержит» и «содержащий»), «иметь» (и любые его формы, такие как «имеет» и «имеющий»), «включать» (и любые его формы, такие как «включает» и «включающий») и «вмещать» (и любые его формы, такие как «вмещает» и «вмещающий») представляют собой неограниченные связующие глаголы. Таким образом, хирургическая система или устройство, которое «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами. Аналогично элемент системы или устройства, который «содержит», «имеет», «включает» или «вмещает» один или более элементов, обладает этим одним или более элементами, но обладание не ограничивается только этим одним или более элементами.
Термины «проксимальный» и «дистальный» в настоящем документе определяются относительно врача, управляющего рукояткой хирургического инструмента. Термин «проксимальный» относится к участку, расположенному ближе всего к врачу, а термин «дистальный» относится к участку, удаленному от врача. Кроме того, для удобства и ясности применительно к чертежам в настоящем документе предлагается использовать такие пространственные термины, как «вертикальный», «горизонтальный», «вверх» и «вниз». Однако, поскольку использование хирургических инструментов предполагает множество ориентаций и положений, эти термины не следует толковать как ограничивающие и/или абсолютные.
Для выполнения лапароскопических и минимально инвазивных хирургических вмешательств предложены различные примеры устройств и способов. Однако читателю будет вполне понятно, что различные способы и устройства, описанные в настоящем документе, можно применять во множестве хирургических вмешательств и сфер применения, включая, например, те, что связаны с открытыми оперативными вмешательствами. По ходу данного подробного описания читатель сможет дополнительно оценить, что разнообразные инструменты, описанные в данном документе, можно вводить в тело любым способом - как через естественные отверстия, так и через разрез или пункционное отверстие, проделанное в тканях, и т. п. Рабочие части или части концевых эффекторов таких инструментов можно вводить непосредственно в тело пациента или через устройство доступа, которое имеет рабочий канал, через который можно проводить концевой эффектор и удлиненный ствол хирургического инструмента.
Хирургическая сшивающая система может содержать ствол и концевой проходящий от ствола эффектор. Концевой эффектор может включать первую браншу и вторую браншу. Первая бранша содержит кассету со скобами. Кассета со скобами выполнена с возможностью вставки в первую браншу и удаления из нее; однако предусмотрены другие варианты осуществления, в которых кассета со скобами выполнена без возможности извлечения из первой бранши или, по меньшей мере, выполнена с возможностью быстрой замены из первой бранши. Вторая бранша содержит упор, выполненный с возможностью деформации скоб, выталкиваемых из кассеты со скобами. Вторая бранша выполнена с возможностью поворота относительно первой бранши вокруг оси закрытия; однако предусмотрены другие варианты осуществления, в которых первая бранша выполнена с возможностью поворота относительно второй бранши. Хирургическая сшивающая система дополнительно содержит шарнирное сочленение, выполненное с возможностью обеспечения вращения или шарнирного поворота концевого эффектора относительно ствола. Концевой эффектор выполнен с возможностью вращения вокруг оси шарнирного сочленения, проходящей через шарнирное сочленение. Предусмотрены другие варианты осуществления, которые не включают шарнирное сочленение.
Кассета со скобами содержит корпус кассеты. Корпус кассеты включает в себя проксимальный конец, дистальный конец и платформу, проходящую между проксимальным концом и дистальным концом. В процессе применения кассета со скобами расположена на первой стороне ткани, подлежащей сшиванию, а упор расположен на второй стороне ткани. Упор перемещается к кассете со скобами для сжатия и прижимания ткани к платформе. После этого скобы, хранящиеся в корпусе кассеты с возможностью извлечения, можно размещать в ткани. Корпус кассеты включает в себя сформированные в нем полости для скоб, при этом скобы хранятся в полостях для скоб с возможностью извлечения. Полости для скоб расположены в шесть продольных рядов. Три ряда полостей для скоб расположены на первой стороне продольного паза, и три ряда полостей для скоб расположены на второй стороне продольного паза. Возможны другие конструкции скоб и полостей для скоб.
В корпусе кассеты скобы поддерживаются с помощью выталкивателей скоб. Выталкиватели выполнены с возможностью перемещения между первым, или неактивированным, положением и вторым, или активированным, положением для выталкивания скоб из полостей для скоб. Выталкиватели удерживаются в корпусе кассеты с помощью фиксатора, который проходит вокруг нижней части корпуса кассеты и включает в себя упругие элементы, выполненные с возможностью захвата корпуса кассеты и удерживания фиксатора относительно корпуса кассеты. Выталкиватели выполнены с возможностью перемещения между их неактивированными положениями и активированными положениями с помощью салазок. Салазки выполнены с возможностью перемещения между проксимальным положением, смежным с проксимальным концом, и дистальным положением, смежным с дистальным концом. Салазки содержат множество наклонных поверхностей, выполненных с возможностью скольжения под выталкивателями и подъема выталкивателей и поддерживаемых на них скоб к упору.
В дополнение к указанному выше салазки перемещаются дистально с помощью пускового элемента. Пусковой элемент выполнен с возможностью контакта с салазками и проталкивания салазок к дистальному концу. Продольный паз, сформированный в корпусе кассеты, выполнен с возможностью приема пускового элемента. Упор также включает в себя паз, выполненный с возможностью приема пускового элемента. Пусковой элемент дополнительно содержит первый кулачок, который взаимодействует с первой браншей, и второй кулачок, который взаимодействует со второй браншей. При дистальном выдвижении пускового элемента первый кулачок и второй кулачок позволяют контролировать расстояние, или тканевый зазор, между платформой кассеты со скобами и упором. Пусковой элемент также содержит скальпель, выполненный с возможностью рассечения ткани, захваченной между кассетой со скобами и упором. Желательно, по меньшей мере, частично располагать скальпель проксимально по отношению к наклонным поверхностям таким образом, чтобы скобы выталкивались раньше скальпеля.
На ФИГ. 1 изображен хирургический сшивающий узел 100. Узел 100 хирургического инструмента включает в себя рукоятку 110, узел 120 ствола, прикрепленный к рукоятке 110 и проходящий из нее, концевой эффектор 130 и шарнирное сочленение 140, которое соединяет с возможностью вращения концевой эффектор 130 с узлом 120 ствола. Рукоятка 110 содержит корпус 115 рукоятки и пистолетную ручку 112, проходящую из корпуса 115 рукоятки. Рукоятка 110 дополнительно содержит закрывающий исполнительный механизм 114, выполненный с возможностью создания закрывающего движения и открывающего движения, которые передаются на концевой эффектор 130 через узел 120 ствола. Рукоятка 110 также содержит исполнительный механизм 116 шарнирного сочленения, выполненный с возможностью шарнирного поворота концевого эффектора 130 вокруг шарнирного сочленения 140. В, по меньшей мере, одном случае исполнительный механизм 116 шарнирного сочленения приводится в действие в первом направлении для поворота концевого эффектора 130 в первом направлении и во втором направлении для поворота концевого эффектора 130 во втором, или противоположном, направлении. Рукоятка 110 дополнительно содержит пусковой исполнительный механизм, выполненный с возможностью создания пускового движения, которое также передается на концевой эффектор 130 через узел 120 ствола.
Узел 120 ствола содержит проксимальный корпус, или мундштук, 125, который выполнен с возможностью прикрепления к корпусу 115 рукоятки. Узел 120 ствола также содержит разъемную защелку 126, выполненную с возможностью разъемной фиксации узла 125 ствола на корпусе 115 рукоятки. Ствол 120 также включает в себя закрывающую трубку 124, которая функционально соединена с закрывающим исполнительным механизмом 114 рукоятки 110. Когда закрывающий исполнительный механизм 114 притягивается в направлении пистолетной ручки 112, закрывающий исполнительный механизм 114 выдвигается дистально к концевому эффектору 130. Закрывающий исполнительный механизм 114 соединен с закрывающей трубкой 124, например, посредством системы шестерней и/или реек таким образом, что перемещение закрывающего исполнительного механизма 114 передается на закрывающую трубку 124. В определенных случаях приведение в действие закрывающего исполнительного механизма 114 может включать электродвигатель, который может перемещать закрывающую трубку 124. В любом случае рукоятка 110 может содержать фиксирующий элемент, выполненный с возможностью высвобождаемого удержания закрывающего исполнительного механизма 114 в полностью закрытом положении. Когда закрывающий исполнительный механизм 114 высвобождается и перемещается в направлении от пистолетной ручки 112, закрывающая трубка 124 отводится проксимально от концевого эффектора 130.
Концевой эффектор 130 содержит первую браншу 132, включающую в себя кассету со скобами. Кассета со скобами включает в себя корпус кассеты и множество скоб, размещенных с возможностью извлечения в корпусе кассеты. Кассету со скобами можно вставлять в первую браншу 132 и легко извлекать из нее таким образом, что ее можно заменять другой кассетой со скобами. В других случаях кассета со скобами может не быть легко заменяемой. В любом случае скобы выталкиваются из кассеты со скобами, когда пусковой элемент выдвигается дистально за счет пускового движения, возникающего в результате приведения в действие пускового исполнительного механизма. Концевой эффектор 130 дополнительно содержит вторую браншу 134, выполненную с возможностью перемещения между открытым положением и закрытым положением в ответ на открывающее движение и закрывающее движение, возникающие при приведении в действие закрывающего исполнительного механизма 114. Предусматриваются и другие варианты осуществления, в которых первая бранша 132 выполнена с возможностью перемещения относительно второй бранши 134. Вторая бранша 134 выполнена с возможностью прижатия ткани к кассете со скобами при перемещении второй бранши 134 в закрытое положение. Вторая бранша 134 содержит упор, выполненный с возможностью деформации скоб при выталкивании скоб из кассеты со скобами под действием пускового элемента. Пусковой элемент также включает в себя режущую часть, например скальпель, который рассекает сшиваемую скобами ткань.
На ФИГ. 2-4 представлены рукоятка 210 и узел 220 ствола системы хирургического инструмента. Рукоятка 210 во многих отношениях аналогична рукоятке 110. Рукоятка 210 содержит раму 218 и узел 220 ствола, разъемным образом прикрепленный к раме 218. Узел 220 ствола во многих отношениях аналогичен узлу 120 ствола. Узел 220 ствола содержит раму 222 ствола, корпус, или мундштук, 225 и систему защелки, выполненную с возможностью разъемного взаимодействия с рамой 218 рукоятки. Система защелки содержит исполнительный механизм 226, установленный с возможностью скольжения на раме 222 ствола. Исполнительный механизм 226 установлен с возможностью скольжения в паз, сформированный в раме 222 ствола, и ограничивается боковыми стенками паза таким образом, что исполнительный механизм 226 может перемещаться по продольной траектории между первым, или проксимальным, положением, в котором исполнительный механизм 226 находится в зацеплении с рамой 218 рукоятки (ФИГ. 2), и вторым, или дистальным, положением, в котором исполнительный механизм 226 выходит из зацепления с рамой 218 рукоятки (ФИГ. 3). Исполнительный механизм 226 содержит фиксирующий элемент, проходящий проксимально из него, который входит в сформированную в раме 218 рукоятки полость фиксирующего элемента, когда исполнительный механизм 226 находится в своем первом, или зацепленном, положении.
Система защелки узла 220 ствола дополнительно содержит защелку 227. Защелка 227 крепится с возможностью вращения на раме 222 ствола вокруг шарнира 221 и может перемещаться между первым, или проксимальным, положением (ФИГ. 2) и вторым, или дистальным, положением (ФИГ. 3). Система защелки дополнительно содержит смещающий элемент, например пружину 228, которая расположена между защелкой 227 и рамой 222 ствола. Пружина 228 смещает защелку 227 проксимально в ее первое положение и в контакт с исполнительным механизмом 226, как показано на ФИГ. 2. Пружина 228 также смещает исполнительный механизм 226 проксимально в его первое положение и в зацепление с рамой 218 рукоятки, что также показано на ФИГ. 2. При подаче исполнительного механизма 226 дистально к его второму положению для высвобождения исполнительного механизма 226 из рамы 218 рукоятки, как показано на ФИГ. 3, исполнительный механизм 226 поворачивает защелку 227 в ее второе положение, противодействуя смещающему усилию, прилагаемому пружиной 228.
В дополнение к указанному выше, когда исполнительный механизм 226 находится в своем втором, или дистальном, положении, то исполнительный механизм 226 высвобождается от зацепления с рамой 218 рукоятки. В этот момент узел 220 ствола может перемещаться относительно рукоятки 210, как показано на ФИГ. 3. В различных случаях рама 222 ствола и рама 218 рукоятки содержат вспомогательные элементы, которые ограничивают перемещение узла 220 ствола относительно рукоятки 210. Например, вспомогательные элементы могут быть выполнены таким образом, что узел 220 ствола скользит вверх относительно рамы 218 рукоятки. Соответственно, вспомогательные элементы могут быть выполнены таким образом, что рама 218 рукоятки может смещаться вниз относительно узла 220 ствола. На самом деле, если врач держит узел 220 ствола одной рукой и не держит рукоятку 210 хирургического инструмента своей второй рукой, рукоятка 210 может неожиданно перемещаться при высвобождении исполнительного механизма 226 из рамы 218 рукоятки. Чтобы не допустить полного отделения рукоятки 210 от хирургического инструмента, как более подробно обсуждается ниже, узел 220 ствола и рукоятка 210 включают в себя вспомогательные элементы, способные останавливать или, по меньшей мере, приостанавливать относительное движение между узлом 220 ствола и рукояткой 210.
Рама 218 рукоятки содержит сформированный в ней паз 219, а защелка 227 содержит выступ 229, проходящий из нее, который выполнен с возможностью вхождения в паз 219. Когда выступ 229 находится в пазу 219, как показано на ФИГ. 2, выступ 229 и паз 219 предотвращают перемещение узла 220 ствола относительно рукоятки 210 и отделение от нее. Иными словами, выступ 229 и паз 219 взаимодействуют друг с другом, чтобы фиксировать узел 220 ствола к рукоятке 210. Когда исполнительный механизм 226 подается дистально, как показано на ФИГ. 3, защелка 227 поворачивается от рамы рукоятки 210, и выступ 229 выходит из паза 219. В этот момент становится возможным определенное относительное движение между узлом 220 ствола и рукояткой 210; вместе с тем узел 220 ствола не может полностью отделиться от рукоятки 210. В частности, высвобождение выступа 229 из паза 219 заставляет зацеп 223, проходящий от защелки 227, совмещаться с фиксирующим буртиком 213, сформированным в раме 218 рукоятки. Поэтому при попытке врача отделить узел 220 ствола от рукоятки 210 после подачи исполнительного механизма 226 дистально зацеп 223 входит в контакт с фиксирующим буртиком 213 и относительное движение между узлом 220 ствола и рукояткой 210 прекращается. Чтобы полностью отделить узел 220 ствола от рукоятки 210, врач может освободить исполнительный механизм 226 и/или протолкнуть исполнительный механизм проксимально, так что защелка 227 поворачивается вперед к раме 218 рукоятки, а зацеп 223 поворачивается от фиксирующего буртика 213. В этот момент узел 220 ствола уже не зафиксирован на рукоятке 210, и узел 220 ствола можно отделить от рукоятки 210. В подобных случаях необходимы дополнительные манипуляции с узлом 220 ствола, чтобы полностью отделить узел 220 ствола от рукоятки 210.
В дополнение к указанному выше выступ 229 и паз 219 представляют собой первую систему блокировки, а зацеп 223 и фиксирующий буртик 213 представляют собой вторую систему блокировки. Первая система блокировки расположена на первой стороне шарнира 221 защелки, и вторая система блокировки находится на второй стороне шарнира 221 защелки. Как опять же показано на ФИГ. 2, первая система блокировки находится в заблокированном состоянии, когда защелка 227 находится в своем первом положении; вместе с тем вторая система блокировки находится в разблокированном состоянии, когда защелка 227 находится в своем первом положении. Как опять же показано на ФИГ. 3, первая система блокировки находится в разблокированном состоянии, когда защелка 227 находится в своем втором положении; вместе с тем вторая система блокировки находится в заблокированном состоянии, когда защелка 227 находится в своем втором положении. В результате перечисленного выше отделение узла 220 ствола от рукоятки 210 включает несколько стадий. В, по меньшей мере, одном случае эти стадии включают достаточное высвобождение выступа 229 из паза 219, достаточное перемещение узла 220 ствола относительно рукоятки 210 таким образом, что выступ 229 более не совмещается с пазом 219, достаточное высвобождение зацепа 223 из фиксирующего буртика 213, а затем отделение узла 220 ствола от рукоятки 210.
В дополнение к указанному выше в ходе процесса отделения требуется стадия, являющаяся дополнением к стадиям высвобождения исполнительного механизма 226 и отделения узла 220 ствола от рукоятки 210, которая может препятствовать отделению рукоятки 210 от хирургического инструмента при высвобождении исполнительного механизма 226. Например, если врач держит узел 220 ствола одной рукой и не держит рукоятку 210 хирургического инструмента второй рукой при приведении в действие исполнительного механизма 226, рукоятка 210 может вначале перемещаться относительно узла 220 ствола; вместе с тем такое перемещение останавливается в результате взаимодействия между зацепом 223 и фиксирующим буртиком 213. Такая конструкция обеспечивает паузу в процессе отделения. Подобная конструкция также требует от врача проделать дополнительные манипуляции с хирургическим инструментом после отделения исполнительного механизма 226, прежде чем узел 220 ствола можно будет полностью отделить от рукоятки 210.
Проблемы отделения рукоятки от хирургического инструмента, которая обсуждалась выше, можно было бы избежать, если бы врач, использующий хирургический инструмент, был постоянно внимателен и держал бы свою вторую руку на рукоятке в момент отделения узла ствола. В различных случаях процедура отделения узла ствола от рукоятки может заставить врача поместить свою вторую руку на рукоятку при отделении узла ствола от рукоятки. В, по меньшей мере, одном случае исполнительный механизм может включать в себя датчик, такой как, например, емкостный датчик, который в состоянии обнаруживать момент, когда врач касается исполнительного механизма, предположительно для приведения в действие исполнительного механизма и отделения узла ствола от рукоятки. Датчик исполнительного механизма может обмениваться данными с системой управления рукоятки, которая может включать в себя, например, микропроцессор, и может обмениваться данными с частью рукоятки, которая может освещаться. В, по меньшей мере, одном случае рукоятка может включать в себя светоизлучающий диод (СИД), который может включаться системой управления. В определенных случаях могут освещаться захватная часть или пистолетная ручка рукоятки. Когда датчик исполнительного механизма обнаруживает, что врач касается исполнительного механизма, система управления может включать освещение освещаемой части рукоятки, тем самым указывая врачу, что он должен положить свою вторую руку на рукоятку, если он еще этого не сделал. Такая конструкция может использоваться в дополнение к описанной выше конструкции или вместо нее.
В дополнение к описанному выше или вместо него хирургический инструмент может потребовать от врача положить свою руку на рукоятку хирургического инструмента, прежде чем можно будет отделить узел ствола хирургического инструмента от рукоятки.
На ФИГ. 5-10 изображен узел 300 хирургического инструмента. Узел 300 хирургического инструмента включает в себя рукоятку 310, которая может использоваться с любым приемлемым узлом ствола, таким как, например, узел 120 ствола. Рукоятка 310 во многих отношениях аналогична рукоятке 110 и/или рукоятке 210. Рукоятка 310 включает в себя исполнительный механизм 116 шарнирного сочленения, выполненный с возможностью приведения в действие привода шарнирного поворота, который осуществляет шарнирный поворот концевого эффектора 130, закрывающий исполнительный механизм 114, выполненный с возможностью приведения в действие закрывающего привода, который закрывает концевой эффектор 130, и пусковой исполнительный механизм 111, выполненный с возможностью приведения в действие пускового привода, который выталкивает скобы из кассеты 132 со скобами. Предусматриваются и другие варианты осуществления, в которых рукоятка может включать в себя исполнительный механизм, который приводит в действие привод шарнирного поворота, закрывающий привод и/или пусковой привод. В любом случае рукоятка 310 также содержит исполнительный механизм 117, выполненный с возможностью возврата в среднее положение, или обратного шарнирного поворота, концевого эффектора 130 и/или втягивания пускового привода узла 300 хирургического инструмента.
В дополнение к указанному выше узел 120 ствола включает в себя исполнительный механизм 126, выполненный с возможностью разъемной блокировки узла 120 ствола на рукоятке 310, когда исполнительный механизм 126 находится в своем первом, или проксимальном, положении. Как обсуждалось выше, исполнительный механизм 126 выполнен с возможностью перемещения между своим первым, или проксимальным, положением и вторым, или дистальным, положением для отделения узла 120 ствола от рукоятки 310. Как более подробно описано ниже, узел 120 ствола дополнительно содержит фиксирующий элемент исполнительного механизма, выполненный с возможностью предотвращения дистального перемещения исполнительного механизма 126, пока не приведен в действие деблокиратор исполнительного механизма, например такой как деблокиратор 311 исполнительного механизма, на рукоятке 310.
Как показано на ФИГ. 7-10, фиксирующий элемент исполнительного механизма содержит соленоид 395, в том числе, например, корпус и выполненный с возможностью перемещения фиксирующий вал 396. Корпус соленоида 395 расположен в полости 397, сформированной в корпусе 391 исполнительного механизма. Корпус 391 исполнительного механизма установлен на раме узла 120 ствола и включает в себя гнездо 399 исполнительного механизма, сформированное внутри него, в котором исполнительный механизм 126 расположен с возможностью скольжения. Гнездо 399 исполнительного механизма содержит сформированный в нем продольный направляющий паз 393, и исполнительный механизм 126 включает в себя продольный направляющий рельс 392, расположенный с возможностью скольжения в направляющем пазу 393. Направляющий рельс 392 и направляющий паз 393 выполнены по форме и размеру с возможностью ограничения перемещения исполнительного механизма 126 относительно гнезда 399 исполнительного механизма заранее заданной траекторией, такой как, например, вдоль продольной траектории.
Направляющий рельс 392 содержит сформированный в нем фиксирующий паз 394, который, как главным образом показано на ФИГ. 9 и 10, совмещен с фиксирующим валом 396 соленоида 395, когда исполнительный механизм 126 находится в своем первом, или проксимальном, положении. В процессе использования фиксирующий вал 396 может проходить через совмещающее отверстие 398 под действием соленоида 395, перемещаясь между незаблокированным положением (ФИГ. 9) и заблокированным положением (ФИГ. 10) для вхождения в зацепление с фиксирующим пазом 394 исполнительного механизма 126. Когда фиксирующий вал 396 соленоида 395 расположен в фиксирующем пазу 394, как показано на ФИГ. 10, фиксирующий вал 396 предотвращает перемещение исполнительного механизма 126 в его второе, или дистальное, положение. Когда приводится в действие деблокиратор 311 исполнительного механизма на рукоятке 310, соленоид 395 втягивает фиксирующий вал 396 из фиксирующего паза 394, и в результате исполнительный механизм 126 может перемещаться в свое второе, или дистальное, положение, позволяющее отделять узел 120 ствола от рукоятки 310.
Как обсуждалось выше, деблокиратор 311 исполнительного механизма рукоятки 310 приводится в действие для втягивания фиксирующего вала 396 фиксирующего элемента, или соленоида, 395 исполнительного механизма. Деблокиратор 311 исполнительного механизма содержит, например, нажимную кнопку; однако можно использовать любой приемлемый исполнительный механизм. Нажимная кнопка включает в себя доступную для пальца часть и переключатель. При нажатии на доступную для пальца часть такая доступная для пальца часть может, например, замыкать переключатель; однако предполагаются и альтернативные варианты осуществления, в которых доступная для пальца часть при нажатии может размыкать переключатель. В любом случае переключатель может быть частью электрической цепи, которая обменивается сигналами с микропроцессором системы управления, которая может обнаруживать нажатие деблокиратора 311 исполнительного механизма. Нажимная кнопка может дополнительно содержать пружину, выполненную с возможностью смещения доступной для пальца части, например, в ненажатое положение.
В различных случаях соленоид 395 может включать в себя смещающий элемент, такой как, например, пружина, выполненный с возможностью смещения фиксирующего вала 396 исполнительного механизма в его втянутое, или невыдвинутое, положение. Когда фиксирующий вал 396 исполнительного механизма находится в своем втянутом положении, то в дополнение к сказанному выше исполнительный механизм 126 может перемещаться дистально при соединении узла 120 ствола с рукояткой 310, а затем высвобождаться для фиксации исполнительного механизма 126 на раме рукоятки 310. И узел 120 ствола, и рукоятка 310 могут включать в себя один или более электрических контактов, которые совмещаются или приводятся в электрический контакт друг с другом при соединении узла 120 ствола с рукояткой 310. В тех вариантах осуществления, в которых микропроцессор и система управления находятся в рукоятке 310, при соединении узла 120 ствола с рукояткой 310 соленоид обменивается данными с микропроцессором и системой управления. В тех вариантах осуществления, в которых микропроцессор и система управления находятся в узле 120 ствола, при креплении узла 120 ствола к рукоятке 310 деблокиратор 311 исполнительного механизма обменивается сигналами с микропроцессором и системой управления.
В дополнение к указанному выше микропроцессор и система управления могут обнаруживать совмещение электрических контактов узла 120 ствола с электрическими контактами на рукоятке 310 и, соответственно, крепление узла 120 ствола к рукоятке 310. Микропроцессор выполнен с возможностью подавать достаточный потенциал на соленоид 395, чтобы перемещать фиксирующий вал 396 исполнительного механизма из его невыдвинутого положения в его выдвинутое положение, чтобы обеспечивать зацепление фиксирующего паза 394 и фиксировать исполнительный механизм 126 в его первом, или проксимальном, положении. В этот момент узел 120 ствола зафиксирован на рукоятке 310, и узел 300 инструмента готов к использованию.
В дополнение к указанному выше микропроцессор может подавать достаточный потенциал на соленоид 395, чтобы удерживать фиксирующий вал 396 исполнительного механизма в его выдвинутом положении. В результате в дополнение к указанному выше узел 120 ствола невозможно отсоединить от рукоятки 310 без приведения в действие деблокиратора 311 исполнительного механизма. После обнаружения приведения в действие деблокиратора 311 исполнительного механизма микропроцессор может прекратить подачу потенциала на соленоид 395 и позволить пружине соленоида вернуть фиксирующий вал 396 в его втянутое положение. В альтернативном варианте осуществления микропроцессор может изменять полярность потенциала, подаваемого на соленоид 395, и возвращать фиксирующий вал 396 в его втянутое положение. В любом случае фиксирующий вал 396 выходит из зацепления с фиксирующим пазом 394, и исполнительный механизм 126 может перемещаться дистально для высвобождения узла 120 ствола из рукоятки 310.
Как обсуждалось выше, врач должен держать в руке рукоятку 310, чтобы отделить узел 120 ствола от рукоятки 310. В результате уменьшается вероятность того, что рукоятка 310 упадет на пол при отделении от нее узла ствола. В некоторых случаях такая конструкция может быть интуитивной для врача. В других случаях врач может не понимать, почему исполнительный механизм 126 нельзя перемещать дистально для высвобождения узла 120 ствола. Рукоятка 310 может включать в себя индикаторы, подсказывающие врачу, что ему необходимо удерживать рукоятку, прежде чем отсоединять узел ствола от рукоятки 310. Например, в, по меньшей мере, одном варианте осуществления деблокиратор 311 исполнительного механизма может дополнительно включать в себя СИД, обменивающийся сигналами с микропроцессором, который может работать в мигающем режиме, например, при обнаружении микропроцессором попытки врача отделить узел 120 ствола без приведения в действие деблокиратора 311 исполнительного механизма. В таком варианте осуществления может также использоваться емкостный датчик на исполнительном механизме 126, обсуждавшийся выше, который может обнаруживать момент, когда врач касается исполнительного механизма 126.
В различных случаях в дополнение к указанному выше узел 120 ствола может включать в себя первый емкостный датчик, выполненный с возможностью обнаружения момента, например, когда врач касается исполнительного механизма 126, и рукоятка 310 может включать в себя второй емкостный датчик, выполненный с возможностью обнаружения момента, когда врач или другой врач касается рукоятки 310. Первый емкостный датчик и второй емкостный датчик обмениваются данными с микропроцессором и системой управления системы хирургического инструмента при соединении узла 120 ствола с рукояткой 310. Когда микропроцессор определяет, что врач касается узла 120 ствола и рукоятки 310, то, как обсуждалось выше, микропроцессор может высвобождать исполнительный механизм 126. В определенных обстоятельствах часть корпуса 115 рукоятки может содержать второй емкостный датчик. Например, пистолетная ручка 112 может содержать второй емкостный датчик. В, по меньшей мере, одном случае, по меньшей мере, часть пистолетной ручки 112 может быть выполнена из прозрачного материала и может включать в себя СИД, находящийся в соединении с микропроцессором, который мигает, когда микропроцессор определяет, что врач касается исполнительного механизма 126, но не касается пистолетной ручки 112.
В дополнение к указанному выше система управления хирургического инструмента может определять соблюдение необходимых критериев безопасности для высвобождения узла ствола. Система управления может требовать, чтобы концевой эффектор узла ствола находился в шарнирно неповернутом положении или, по меньшей мере, в по существу шарнирно неповернутом положении, прежде чем высвободить узел ствола. В некоторых случаях система управления может автоматически возвращать концевой эффектор в среднее положение при соблюдении всех других критериев безопасности и попытке врача отсоединить узел ствола от рукоятки. В некоторых случаях система управления может требовать, чтобы концевой эффектор узла ствола находился в открытой, или разжатой, конфигурации, прежде чем высвободить узел ствола. В некоторых случаях система управления может автоматически открывать концевой эффектор при соблюдении всех других критериев безопасности и попытке врача отсоединить узел ствола от рукоятки.
В некоторых случаях хирургический инструмент может включать в себя систему тактильной обратной связи, которая может сообщать врачу о необходимости выполнения дополнительного действия, прежде чем узел ствола можно будет отсоединить от рукоятки. Например, рукоятка может включать в себя электродвигатель, выполненный с возможностью генерирования тактильного или вибрационного ответа, если система управления обнаруживает, что врач не держит рукоятку.
Как обсуждалось выше, электронный фиксирующий элемент можно использовать для фиксации узла ствола на рукоятке до тех пор, пока не будут пройдены, по меньшей мере, две стадии отделения, чтобы снизить вероятность случайного отсоединения рукоятки от узла ствола или наоборот. Как также обсуждалось выше, электронный фиксирующий элемент можно использовать в комбинации с механическим фиксирующим элементом, причем приведение в действие электронного фиксирующего элемента и механического фиксирующего элемента соответствует двум стадиям отделения. Рассматриваются различные варианты осуществления, в которых можно использовать два механических фиксирующих элемента без применения электронного фиксирующего элемента. В, по меньшей мере, одном таком варианте осуществления первый механический фиксирующий элемент может быть размещен на узле ствола, а второй механический фиксирующий элемент может быть размещен, например, на рукоятке. Рассматриваются определенные варианты осуществления, в которых можно использовать, например, два электронных фиксирующих элемента.
Как обсуждалось выше, система хирургического инструмента может содержать различные системы, которые обеспечивают обратную связь для способствования надлежащему отделению узла ствола от рукоятки. В различных случаях система хирургического инструмента может содержать различные системы, которые обеспечивают обратную связь для врача, информируя его о том, что узел ствола надлежащим образом собран с рукояткой. В, по меньшей мере, одном таком случае система защелки может обеспечивать слышимый щелчок, указывающий на надлежащее размещение защелки. В некоторых случаях рукоятка может включать в себя систему тактильной обратной связи, которая может сообщать врачу о надлежащем размещении узла ствола.
На ФИГ. 11 и 12 изображена система 400 хирургического инструмента. Система 400 хирургического инструмента включает в себя рукоятку 410 и узел 420 ствола. Узел 420 ствола выполнен с возможностью разъемного прикрепления к рукоятке 410. Узел 420 ствола включает в себя раму 422, штангу 441 передачи шарнирного поворота и штангу 451 передачи пускового усилия. Рукоятка 410 содержит корпус 415, привод 440 шарнирного поворота, выполненный с возможностью функционального взаимодействия со штангой 441 передачи шарнирного поворота ствола, и пусковой привод 450, выполненный с возможностью функционального взаимодействия со штангой 451 передачи пускового усилия ствола. Привод 440 шарнирного поворота и штанга 441 передачи шарнирного поворота выполнены с возможностью шарнирного поворота концевого эффектора узла 420 ствола. Пусковой привод 450 и штанга 451 передачи пускового усилия выполнены с возможностью выталкивания скоб, которые, например, хранятся с возможностью извлечения в кассете со скобами, расположенной в концевом эффекторе узла 420 ствола.
Привод 440 шарнирного поворота и пусковой привод 450 системы 400 хирургического инструмента содержат разделенные и отличающиеся друг от друга системы исполнительных механизмов. Более того, привод 440 шарнирного поворота и пусковой привод 450 не могут быть приведены в действие одновременно.
Привод 440 шарнирного поворота и пусковой привод 450 приводятся в действие селективно с помощью электродвигателя 460. Привод 440 шарнирного поворота содержит установленную на нем рейку 444 шарнирного поворота, и пусковой привод 450 включает в себя установленную на нем пусковую рейку 454, которые выполнены с возможностью селективного соединения с электродвигателем 460. Как более подробно описано ниже, рукоятка 410 содержит систему приведения в действие, выполненную с возможностью переключения рукоятки 410 между рабочим режимом шарнирного поворота и рабочим режимом пуска.
Система приведения в действие рукоятки 410 содержит рычаг 413, который соединен с возможностью вращения с рамой рукоятки 410. Рычаг 413 выполнен с возможностью поворота вокруг шарнира 412 между первым положением и вторым положением. Рычаг 413 содержит проходящее от него плечо 414 рычага, которое соединено с кольцом 467 переключателя. Кольцо 467 переключателя имеет внутреннюю полость 465, которая выполнена с возможностью вхождения в нее шлицевой части 463 поворотного приводного вала 462, но не находится в функциональном зацеплении с ней. Кольцо 467 переключателя дополнительно содержит проходящий из него штифт 466, который расположен в прорези 411, сформированной в плече 414 рычага. При повороте рычага 413 между первым положением (ФИГ. 11) и вторым положением (ФИГ. 12) плечо 414 рычага подает кольцо 467 переключателя вверх вдоль шлицевой части 463 вала 462. При возвращении рычага 413 в его первое положение (ФИГ. 11) плечо 414 рычага подает кольцо 467 переключателя вниз вдоль шлицевой части 463 вала 462.
Система приведения в действие рукоятки 410 дополнительно содержит ведущую шестерню 464. Ведущая шестерня 464 имеет шлицевую внутреннюю полость 469, которая находится в функциональном зацеплении со шлицевой частью 463 приводного вала 462, в результате чего ведущая шестерня 464 может поворачиваться вместе с приводным валом 462. Приводной вал 462 установлен с возможностью поворота в рукоятке 410 и может вращаться вокруг продольной оси с помощью электродвигателя 460. В различных случаях может возникнуть необходимость снижения или замедления скорости выходного вала электродвигателя 460. В таких случаях можно использовать систему 461 редуктора, чтобы вращать приводной вал 462 с нужной скоростью. В любом случае ведущая шестерня 464 установлена с возможностью поворота на кольце 467 переключателя и может вращаться относительно кольца 467 переключателя.
В дополнение к указанному выше ведущая шестерня 464 может поступательно перемещаться вместе с кольцом 467 переключателя. Когда рычаг 413 находится в своем первом положении, как показано на ФИГ. 11, ведущая шестерня 464 находится в функциональном зацеплении с рейкой 444 шарнирного поворота привода 440 шарнирного поворота. В таких случаях рукоятка 410 находится в рабочем режиме шарнирного поворота, и электродвигатель 460 выполнен с возможностью приведения в действие для перемещения привода 440 шарнирного поворота проксимально для шарнирного поворота концевого эффектора узла 420 ствола в первом направлении и дистально для шарнирного поворота концевого эффектора узла 420 ствола во втором направлении. Когда рычаг 413 находится в своем втором положении, как показано на ФИГ. 12, ведущая шестерня 464 находится в функциональном зацеплении с пусковой рейкой 454 пускового привода 450. В таких случаях рукоятка 410 находится в рабочем режиме пуска, и электродвигатель 460 выполнен с возможностью приведения в действие для перемещения пускового привода 450 дистально для выдвижения пускового элемента и выталкивания скоб из кассеты со скобами, расположенной в концевом эффекторе, и проксимально для втягивания пускового элемента.
Рейка 444 шарнирного поворота привода 440 шарнирного поворота и пусковая рейка 454 пускового привода 450 могут быть разнесены друг от друга на достаточное расстояние таким образом, что ведущая шестерня 464 не входит в одновременное зацепление с рейкой 444 шарнирного поворота и пусковой рейкой 454. В результате привод 440 шарнирного поворота и пусковой привод 450 не могут быть приведены в действие одновременно. Таким образом, привод 440 шарнирного поворота и пусковой привод 450 приводятся в действие раздельно и различным образом. Более того, привод 440 шарнирного поворота может быть зафиксирован в определенном положении, когда рукоятка 410 находится в своем рабочем режиме пуска. Например, рычаг 413 содержит проходящий из него фиксирующий элемент 416, который не входит в зацепление с приводом 440 шарнирного поворота, когда рычаг 413 находится в своем первом положении (ФИГ. 11), и входит в зацепление с приводом 440 шарнирного поворота при повороте рычага 413 в его второе положение (ФИГ. 12). Привод 440 шарнирного поворота дополнительно содержит набор сформированных в нем углублений 446 для фиксатора, которые выполнены с возможностью зацепления с фиксирующим элементом 416. После того как фиксирующий элемент 416 входит в углубление 446 для фиксатора, привод 440 шарнирного поворота не может перемещаться проксимально или дистально, в результате чего концевой эффектор узла 420 ствола не может шарнирно поворачиваться ни в первом направлении, ни во втором направлении. В определенных обстоятельствах рукоятка 410 может включать в себя высвобождаемый фиксирующий элемент, выполненный с возможностью удержания рычага 413 в его втором положении, чтобы препятствовать возвратным силам, например передаваемым через концевой эффектор на привод 440 шарнирного поворота.
На ФИГ. 13-15 изображена система 500 хирургического инструмента. Система 500 хирургического инструмента содержит рукоятку 510, которая во многих отношениях аналогична рукоятке 410. Рукоятка 510 содержит рычаг 513, который выполнен с возможностью поворота вокруг шарнира 412 между первым положением (ФИГ. 13) и вторым положением (ФИГ. 14) для переключения рукоятки 510 между рабочим режимом шарнирного поворота и рабочим режимом пуска. Рычаг 513 содержит проходящее от него плечо 514 рычага, которое соединено с кольцом 567 переключателя. Кольцо 567 переключателя имеет внутреннюю полость 565, которая выполнена с возможностью вхождения в нее шлицевой части 463 поворотного приводного вала 462, но не находится в функциональном зацеплении с ней. Кольцо 567 переключателя дополнительно содержит проходящий из него штифт 566, который расположен в прорези 511, сформированной в плече 514 рычага. При повороте рычага 513 между первым положением (ФИГ. 13) и вторым положением (ФИГ. 14) плечо 514 рычага подает кольцо 567 переключателя вверх вдоль шлицевой части 463 вала 462. При возвращении рычага 513 в его первое положение (ФИГ. 13) плечо 514 рычага подает кольцо 567 переключателя вниз вдоль шлицевой части 463 вала 462.
Система приведения в действие рукоятки 510 дополнительно содержит ведущую шестерню 564. Ведущая шестерня 564 имеет шлицевую внутреннюю полость 569, которая находится в функциональном зацеплении со шлицевой частью 463 приводного вала 462, в результате чего ведущая шестерня 564 может поворачиваться вместе с приводным валом 462. Ведущая шестерня 564 установлена с возможностью поворота на кольце 567 переключателя и может вращаться относительно кольца 567 переключателя. Ведущая шестерня 564 включает в себя цилиндрическую часть, которая проходит через внутреннюю полость 565 кольца 567 переключателя. Ведущая шестерня 564 дополнительно содержит втулку 568, проходящую от цилиндрической части ведущей шестерни 564 и расположенную с нижней стороны кольца 567 переключателя. Ведущая шестерня 564 и втулка 568 вместе образуют сформированный между ними подшипник, который обеспечивает относительное вращательное перемещение между ведущей шестерней 564 и кольцом 567 переключателя. Более того, ведущая шестерня 564 содержит первую поверхность, которая выполнена с возможностью зацепления с кольцом 567 переключателя для перемещения ведущей шестерни 564 вверх, и втулка 568 содержит вторую приводную поверхность, которая выполнена с возможностью зацепления с кольцом 567 переключателя для перемещения ведущей шестерни 564 вниз.
В дополнение к указанному выше ведущая шестерня 564 может поступательно перемещаться вместе с кольцом 567 переключателя. Когда рычаг 513 находится в своем первом положении, как показано на ФИГ. 13, ведущая шестерня 564 находится в функциональном зацеплении с рейкой 444 шарнирного поворота привода 440 шарнирного поворота. В таких случаях рукоятка 510 находится в рабочем режиме шарнирного поворота, и электродвигатель 460 выполнен с возможностью приведения в действие для перемещения привода 440 шарнирного поворота проксимально для шарнирного поворота концевого эффектора узла 420 ствола в первом направлении и дистально для шарнирного поворота концевого эффектора узла 420 ствола во втором направлении. Когда рычаг 513 находится в своем втором положении, как показано на ФИГ. 14, ведущая шестерня 564 находится в функциональном зацеплении с пусковой рейкой 454 пускового привода 450. В таких случаях рукоятка 510 находится в рабочем режиме пуска, и электродвигатель 460 выполнен с возможностью приведения в действие для перемещения пускового привода 450 дистально для выдвижения пускового элемента и выталкивания скоб из кассеты со скобами, расположенной в концевом эффекторе, и проксимально для втягивания пускового элемента.
Рейка 444 шарнирного поворота привода 440 шарнирного поворота и пусковая рейка 454 пускового привода 450 могут быть разнесены друг от друга на достаточное расстояние таким образом, что ведущая шестерня 564 не входит в одновременное зацепление с рейкой 444 шарнирного поворота и пусковой рейкой 454. В результате привод 440 шарнирного поворота и пусковой привод 450 не могут быть приведены в действие одновременно, и, таким образом, привод 440 шарнирного поворота и пусковой привод 450 приводятся в действие раздельно и различным образом. Более того, привод 440 шарнирного поворота может быть зафиксирован в определенном положении, когда рукоятка 510 находится в своем рабочем режиме пуска. Например, кольцо 567 переключателя содержит фиксирующую часть, которая не входит в зацепление с приводом 440 шарнирного поворота, когда рычаг 513 находится в своем первом положении (ФИГ. 13), и входит в зацепление с приводом 440 шарнирного поворота при повороте рычага 513 в его второе положение (ФИГ. 14). После того как фиксирующее кольцо 567 входит в зацепление с рейкой 444 шарнирного поворота, привод 440 шарнирного поворота не может перемещаться проксимально или дистально, в результате чего концевой эффектор узла 420 ствола не может шарнирно поворачиваться ни в первом направлении, ни во втором направлении. В определенных обстоятельствах рукоятка 510 может включать в себя высвобождаемый фиксирующий элемент, выполненный с возможностью удержания рычага 513 в его втором положении, чтобы препятствовать возвратным силам, например передаваемым через концевой эффектор на привод 440 шарнирного поворота.
Как обсуждалось выше, узел 420 ствола содержит штангу 441 передачи шарнирного поворота и штангу 451 передачи пускового усилия, которые выполнены с возможностью прикрепления к приводу 440 шарнирного поворота и пусковому приводу 450 соответственно, например, при сборке узла 420 ствола с рукояткой 410. В частности, проксимальный конец 455 штанги 451 передачи пускового усилия одновременно или по существу одновременно собран с дистальным концом 453 пускового привода 450, так что проксимальный конец 445 штанги 441 передачи шарнирного поворота собран с дистальным концом 443 привода 440 шарнирного поворота. Для облегчения одновременного крепления системы приведения в действие шарнирного сочленения и системы приведения в действие пуска узел 420 ствола содержит средства удерживания штанги 441 передачи шарнирного поворота и штанги 451 передачи пускового усилия в определенном положении относительно друг друга до и/или в процессе сборки узла 420 ствола с рукояткой 410. В, по меньшей мере, одном примере можно использовать фиксатор для разъемного крепления штанги 441 передачи шарнирного поворота, например, к штанге 451 передачи пускового усилия. Такой фиксатор может включать в себя выступ 442, проходящий от штанги 441 передачи шарнирного поворота в канавку 452, сформированную в штанге 451 передачи пускового усилия. Фиксатор должен обеспечивать только достаточное удерживающее усилие между штангой 441 передачи шарнирного поворота и штангой 451 передачи пускового усилия, чтобы удерживать их вместе в момент сборки ствола 420 с рукояткой 410. Перемещение либо штанги 441 передачи шарнирного поворота, либо штанги 451 передачи пускового усилия во время использования узла 420 ствола, как описано выше, может преодолевать удерживающее усилие, обеспечиваемое фиксатором. В случаях, когда действие фиксатора может легко преодолеваться, операция переключения рукоятки 410 между ее рабочим режимом шарнирного поворота и ее рабочим режимом пуска может, как описано выше, фиксировать систему привода шарнирного поворота, и при дистальном выдвижении системы пускового привода штанга 451 передачи пускового усилия может разобщаться со штангой 441 передачи шарнирного поворота. В таких случаях фиксатор может сообщать движение системы привода шарнирного поворота на систему пускового привода в рабочем режиме шарнирного поворота рукоятки 410; однако такого переданного движения на систему пускового привода недостаточно для выталкивания скоб из кассеты со скобами в концевом эффекторе узла 420 ствола.
Как обсуждалось выше, системы 400 и 500 хирургического инструмента могут включать в себя системы для переключения систем хирургического инструмента между рабочим режимом шарнирного поворота и рабочим режимом пуска. Такие системы могут быть выполнены с возможностью переключения системы хирургического инструмента между любыми двумя приемлемыми рабочими режимами. Например, между рабочим режимом закрытия и рабочим режимом шарнирного поворота. Также, например, между рабочим режимом закрытия и рабочим режимом пуска.
На ФИГ. 16-18 изображена система 600 хирургического инструмента. Система 600 хирургического инструмента содержит рукоятку 610 и узел 620 ствола, разъемно прикрепленный к рукоятке 610. Узел 620 ствола содержит стержень, или раму, 622 ствола и приводимую в действие закрывающую трубку 624, выполненную с возможностью закрытия концевого эффектора узла 620 ствола. Узел 620 ствола дополнительно содержит любую приемлемую систему закрывающего привода, выполненную с возможностью приведения в действие закрывающей трубки 624. Система закрывающего привода может приводиться в действие закрывающим спусковым механизмом 614, например проходящим от рукоятки 610. Узел 620 ствола дополнительно содержит электродвигатель 660, выполненный с возможностью переключения узла 620 ствола между рабочим режимом шарнирного поворота и рабочим режимом пуска, и, кроме того, электродвигатель 670 выполнен с возможностью управления системой привода шарнирного поворота и системой пускового привода узла 620 ствола, как более подробно описано ниже.
В дополнение к указанному выше электродвигатель 660 выполнен с возможностью переключения трансмиссии 665 между положением шарнирного поворота (ФИГ. 17) и положением пуска (ФИГ. 18) для установки узла 620 ствола в его рабочий режим шарнирного поворота и его рабочий режим пуска соответственно. Когда трансмиссия 665 находится в своем положении шарнирного поворота, штанга 640 шарнирного поворота может перемещаться проксимально и/или дистально с помощью трансмиссии 665, чтобы осуществить шарнирный поворот концевого эффектора узла 620 ствола, как более подробно обсуждается ниже. Трансмиссия 665 перемещается проксимально и/или дистально под действием пускового стержня 650, который перемещается проксимально и/или дистально под действием электродвигателя 670. Как преимущественно показано на ФИГ. 17, трансмиссия 665 включает в себя сформированный в ней продольный проем 669, и пусковой стержень 650 проходит через такой продольный проем 669. Проем 669 включает в себя выступающее внутрь приводное плечо 667, которое выполнено с возможностью расположения в приводном пазу 659, сформированном в пусковом стержне 650, когда трансмиссия 665 находится в своем положении шарнирного поворота. Когда трансмиссия 665 находится в своем положении шарнирного поворота, а пусковой стержень 650 выдвигается дистально с помощью электродвигателя 670, проксимальная боковая стенка приводного паза 659 может упираться в приводное плечо 667 и проталкивать трансмиссию 665 дистально. Соответственно, дистальная боковая стенка приводного паза 659 может упираться в приводное плечо 667 и проталкивать трансмиссию 665 проксимально при втягивании пускового стержня 650 проксимально с помощью электродвигателя 670.
В дополнение к указанному выше трансмиссия 665 содержит сформированный в ней кольцевой приводной паз 666, и штанга 640 шарнирного поворота содержит проксимальный конец 646, расположенный в кольцевом приводном пазу 666. При выдвижении трансмиссии 665 дистально под действием электродвигателя 670 и пускового стержня 650, как обсуждалось выше, проксимальная боковая стенка приводного паза 666 соприкасается с проксимальным концом 646 штанги 640 шарнирного поворота и выдвигает штангу 640 шарнирного поворота дистально для шарнирного поворота концевого эффектора в первом направлении. При втягивании трансмиссии 665 проксимально под действием электродвигателя 670 и пускового стержня 650, как обсуждалось выше, дистальная боковая стенка приводного паза 666 соприкасается с проксимальным концом 646 штанги 640 шарнирного поворота и втягивает штангу 640 шарнирного поворота проксимально для шарнирного поворота концевого эффектора во втором направлении. Проксимальный конец 646 штанги 640 шарнирного поворота может быть плотно размещен между проксимальной боковой стенкой и дистальной боковой стенкой кольцевого приводного паза 666; при этом боковые стенки кольцевого приводного паза 666 могут скользить относительно проксимального конца 646 при вращении трансмиссии 665 между своим положением шарнирного поворота и положением пуска.
Как уже обсуждалось выше, электродвигатель 660 выполнен с возможностью переключать узел 620 ствола между его рабочим режимом шарнирного поворота (ФИГ. 17) и его рабочим режимом пуска (ФИГ. 18). Электродвигатель 660 содержит вращающийся выходной вал 661 и ведущую шестерню 662, установленную на выходном валу 661 таким образом, что вращение выходного вала 661 передается на ведущую шестерню 662. Ведущая шестерня 662 находится в зубчатом зацеплении с промежуточной шестерней 663 таким образом, что вращение ведущей шестерни 662 передается на промежуточную шестерню 663. Промежуточная шестерня 663 с возможностью вращения установлена на валу шестерни 668 в рукоятке 610 и находится в зубчатом зацеплении с рядом 664 зубьев, проходящим от трансмиссии 665. Ряд 664 зубьев может быть установлен на трансмиссии 665 и/или образовывать с ней единое целое таким образом, что вращение промежуточной шестерни 663 передается на трансмиссию 665. Трансмиссия 665 прикреплена с возможностью поворота в продольном проеме 625, сформированном в раме 622 ствола. Трансмиссия 665 также установлена с возможностью скольжения в продольном проеме 625, чтобы обеспечивать проксимальное и дистальное поступательное перемещение трансмиссии 665, которое обсуждалось выше.
В дополнение к указанному выше электродвигатель 660 выполнен с возможностью вращения в первом направлении для поворота трансмиссии 665 из ее положения шарнирного поворота (ФИГ. 17) в ее положение пуска (ФИГ. 18) и, соответственно, во втором, или противоположном, направлении для поворота трансмиссии 665 из ее положения пуска (ФИГ. 18) в ее положение шарнирного поворота (ФИГ. 17). Когда трансмиссия 665 находится в своем положении пуска, как показано на ФИГ. 18, приводное плечо 667 не расположено в приводном пазу 659. Напротив, приводное плечо 667 совмещено с плоской поверхностью 657, сформированной на пусковом стержне 650, в результате чего пусковой стержень 650 может перемещаться относительно трансмиссии 665 под действием электродвигателя 670. Иными словами, поворот трансмиссии 665 в ее положение пуска переводит узел 620 ствола в его рабочий режим пуска, и проксимальное и/или дистальное перемещение пускового стержня 650 не передается на трансмиссию 665 и штангу 640 шарнирного поворота. В результате пусковой стержень 650 может выдвигаться дистально для выталкивания скоб, которые, например, хранятся с возможностью извлечения в кассете со скобами, расположенной в концевом эффекторе узла 620 ствола.
После выдвижения пускового стержня 650 дистально приводной паз 659, сформированный в пусковом стержне 650, более не совмещается с приводным плечом 667 трансмиссии 665. В результате трансмиссия 665 не может поворачиваться из своего пускового положения (ФИГ. 18) в свое положение шарнирного поворота (ФИГ. 17) до тех пор, пока пусковой стержень 650 не будет достаточно втянут, чтобы обеспечить совмещение приводного паза 659 с приводным плечом 667. В этот момент электродвигатель 660 может повернуть трансмиссию 665 назад в ее положение шарнирного поворота и вновь перевести узел 620 ствола в его рабочий режим шарнирного поворота. При сравнении ФИГ. 17 и 18 становится очевидным, что ряд 664 зубьев не проходит по всей длине трансмиссии 665; при этом промежуточная шестерня 663 может оставаться в зубчатом зацеплении с рядом 664 зубьев во время вращения трансмиссии 665. Более того, как преимущественно показано на ФИГ. 16, ряд 664 зубьев проходит в продольном направлении вдоль внешней поверхности трансмиссии 665 таким образом, что промежуточная шестерня 663 остается в зубчатом зацеплении с трансмиссией 665, по мере того как трансмиссия 665 перемещается проксимально и/или дистально под действием электродвигателя 670.
Как уже обсуждалось выше, узел 620 ствола выполнен с возможностью прикрепления к рукоятке 610 и отсоединения от нее. Перед сборкой узла 620 ствола с рукояткой 610 система привода шарнирного поворота и система пускового привода узла 620 ствола могут соединяться друг с другом, чтобы снизить вероятность случайного смещения системы привода шарнирного поворота и/или системы пускового привода. Такое случайное смещение может происходить при транспортировке узла 620 ствола и/или, например, при осуществлении врачом манипуляций с узлом 620 ствола. Узел 620 ствола можно пересылать и собирать на рукоятке 610, когда узел 620 ствола находится в своем рабочем режиме шарнирного поворота таким образом, что приводное плечо 667 трансмиссии 665 находится в зацеплении с приводным пазом 659 пускового стержня 650. В результате штанга 640 шарнирного поворота и пусковой стержень 650 соединены вместе, и вероятность, например, возвратного хода либо системы привода шарнирного поворота, либо системы пускового привода будет уменьшаться за счет сил сопротивления и трения, действующих в этих двух системах привода.
В дополнение к обсуждавшимся выше пассивным силам сопротивления или вместо них электродвигатель 660 и/или электродвигатель 670 может активно противодействовать случайному шарнирному повороту концевого эффектора узла 620 ствола, например, перед сборкой узла 620 ствола на рукоятке 610. При транспортировке или перемещении узла 620 ствола в рабочем режиме шарнирного поворота внешние силы, действующие на концевой эффектор, будут стремиться протолкнуть пусковой стержень 650 дистально и/или втянуть пусковой стержень 650 проксимально в зависимости от направления вращения концевого эффектора под действием внешних сил. Узел 620 ствола может включать в себя систему управления, выполненную с возможностью отслеживания движения пускового стержня 650 и приведения в действие электродвигателя 670 в нужном направлении, чтобы препятствовать смещению пускового стержня 650. Например, система управления может включать в себя датчик линейных перемещений, выполненный с возможностью отслеживания линейного смещения пускового стержня 650, и микропроцессор 680, обменивающийся сигналами с датчиком линейных перемещений, который может управлять электродвигателем 670, чтобы останавливать случайное движение пускового стержня 650 и/или восстанавливать положение пускового стержня 650 в шарнирно неповернутое, или исходное, положение.
В дополнение к сказанному выше, узел 620 ствола может включать в себя источник питания, такой как, например, аккумулятор, выполненный с возможностью подачи электрического питания на электродвигатель 670 и/или микропроцессор 680. Микропроцессор 680 может быть выполнен с возможностью постоянного и/или периодического отслеживания положения пускового стержня 650. Микропроцессор 680 может управлять положением пускового стержня 650 посредством электродвигателя 670, чтобы удерживать пусковой стержень 650 в шарнирно неповернутом положении перед сборкой узла 620 ствола на рукоятке 610. После сборки узла 620 ствола на рукоятке 610 микропроцессор 680 может управлять положением пускового стержня посредством электродвигателя 670, что обусловлено, например, работой исполнительного механизма шарнирного сочленения на рукоятке 610. Иными словами, микропроцессор 680 выполнен с возможностью определения, собран ли узел 620 рукоятки на рукоятке 610 или нет, и может управлять узлом 620 ствола в первом рабочем режиме, когда микропроцессор 680 определяет, что узел 620 ствола не был собран на рукоятке 610, и во втором рабочем режиме, когда микропроцессор 680 определяет, что узел 620 ствола был собран на рукоятке 610. В, по меньшей мере, одном случае узел 620 рукоятки содержит электрические контакты 682, которые, во-первых, обмениваются сигналами с микропроцессором 680 и, во-вторых, взаимодействуют с электрическими контактами 683 на рукоятке 610, когда узел 620 ствола собран на рукоятке 610. Взаимодействие электрических контактов 682 с электрическими контактами 683 может приводить к изменениям сопротивления в электрической цепи, которые, например, могут обнаруживаться микропроцессором 680.
Как обсуждалось выше, узел 620 ствола может включать в себя источник питания, такой как, например, аккумулятор. Предусматриваются и другие варианты осуществления, в которых узел 620 ствола не содержит источника питания и узел 620 ствола функционально соединен с источником питания, когда узел 620 ствола собран на рукоятке 610. В, по меньшей мере, одном варианте осуществления микропроцессор 680 может выполнять диагностическую проверку узла 620 ствола, после того как на него поступает питание от рукоятки 610. В, по меньшей мере, одном варианте осуществления микропроцессор 680 может центрировать концевой эффектор, если концевой эффектор был, например, случайно шарнирно повернут перед сборкой узла 620 ствола на рукоятке 610.
На ФИГ. 19 приведен пример хирургического инструмента 700. Хирургический инструмент 700 содержит рукоятку 710 и узел 720 ствола, который выполнен с возможностью прикрепления к рукоятке 710 и отсоединения от нее. Узел 720 ствола содержит исполнительный механизм 740 шарнирного сочленения, который находится в функциональном зацеплении с электродвигателем 760 рукоятки 710, когда узел 720 ствола собран на рукоятке 710. Электродвигатель 760 включает в себя вращающийся выходной вал 761 и червячную шестерню 762, установленную на выходном валу 761. Исполнительный механизм 740 шарнирного сочленения содержит проксимальный конец 741, который включает в себя червячную рейку 742, сопряженную с червячной шестерней 762. Для сопряжения червячной рейки 742 с червячной шестерней 762 в, по меньшей мере, одном случае узел 720 ствола может быть собран с рукояткой 710 в поперечном направлении таким образом, что червячная рейка 742 скользит относительно червячной шестерни 762. В любом случае зубцы червячной рейки 742 и червячная шестерня 762 проходят под поперечным углом, который может препятствовать или предотвращать возвратный ход концевого эффектора и системы шарнирного сочленения узла 720 ствола.
Система хирургического инструмента, включающая в себя вводной исполнительный механизм 850, штангу 841 шарнирного поворота, пусковой стержень 851 и втулку 860 трансмиссии, приведена на ФИГ. 20-25В. В, по меньшей мере, одном случае рукоятка может включать в себя вводной исполнительный механизм 850, и узел ствола может включать в себя втулку 860 трансмиссии, штангу 841 шарнирного поворота и пусковой стержень 851. Узел ствола может быть выполнен с возможностью прикрепления к рукоятке и отсоединения от нее. Пусковой стержень 851 включает в себя соединительный проем 853, выполненный с возможностью введения дистального конца 852 пускового стержня 851 при прикреплении узла ствола к рукоятке. Соединительный проем 853 сформирован между двумя проксимально отходящими фиксирующими плечами 854 пускового стержня 851. При проталкивании пускового стержня 851 к вводному исполнительному механизму 850 фиксирующие плечи 854 могут разводиться наружу для введения дистального конца 852 вводного исполнительного механизма 850 и упруго возвращаться назад в сведенное положение после размещения дистального конца 852 в соединительном проеме 853. Каждое фиксирующее плечо 854 включает в себя фиксирующий зубец 857, сформированный на его проксимальном конце, который, по меньшей мере, частично защелкивается за дистальным концом 852 после размещения дистального конца 852 в соединительном проеме 853. Такая конструкция может быть достаточной для сохранения положения вводного исполнительного механизма 850 и пускового стержня 851 относительно друг друга; вместе с тем пусковой стержень 851 недостаточно плотно прижимается к вводному исполнительному механизму 850 для шарнирного поворота концевого эффектора узла ствола и/или, например, для выталкивания скоб, хранящихся в кассете со скобами, расположенной в концевом эффекторе.
Как уже обсуждалось выше, пусковой стержень 851 собирают с вводным исполнительным механизмом 850 за счет проталкивания пускового стержня 851 во вводной исполнительный механизм 850 в осевом направлении. Втулка 860 трансмиссии может удерживать пусковой стержень 851 в заданном положении, когда пусковой стержень 851 прикреплен к вводному исполнительному механизму 850. Более того, втулка 860 трансмиссии может удерживать штангу 841 шарнирного поворота в заданном положении, по меньшей мере, когда втулка 860 трансмиссии находится в своем первом положении, как более подробно описано ниже.
Втулка 860 трансмиссии может перемещаться между первым положением (ФИГ. 23-23В), в котором вводной исполнительный механизм 850 выполнен с возможностью функционального взаимодействия с пусковым стержнем 851, как обсуждалось выше, вторым положением (ФИГ. 24-24В), в котором втулка 860 трансмиссии прижимает пусковой стержень 851 к вводному исполнительному механизму 850 и фиксирует штангу 841 шарнирного поворота на пусковом стержне 851, и третьим положением (ФИГ. 25-25В), в котором втулка 860 трансмиссии разобщает штангу 841 шарнирного поворота и пусковой стержень 851, и вводной исполнительный механизм 850 может, например, выдвигать пусковой стержень 851 для выталкивания скоб, хранящихся в концевом эффекторе узла ствола. Втулка 860 трансмиссии выполнена с возможностью вращения в направлении 869 между своим первым положением (ФИГ. 23-23В), своим вторым положением (ФИГ. 24-24В) и своим третьим положением (ФИГ. 25-25В). Втулка 860 трансмиссии содержит выступающие внутрь зажимные зубцы 864a-864d, расположенные по ее периметру, которые поворачиваются для входа или выхода из зацепления с фиксирующими плечами 854 пускового стержня 851 в зависимости от положения втулки 860 трансмиссии. Каждое фиксирующее плечо 854 содержит консольную балку, свободный конец которой находится в контакте с зажимными зубцами 864a-864d для отклонения фиксирующих плеч 854 внутрь. Зажимные зубцы 864a-864d расположены на проксимальном конце втулки 860 трансмиссии и не входят в зацепление со штангой 841 шарнирного поворота независимо от положения втулки 860 трансмиссии.
Когда втулка 860 трансмиссии находится в своем первом положении, как показано на ФИГ. 23-23В, зажимные зубцы 864a-864d не входят в зацепление с фиксирующими плечами 854 пускового стержня 851. Таким образом, как показано преимущественно на ФИГ. 23В, фиксирующие плечи 854 не отклоняются внутрь зажимными зубцами 864a-864d для прижимания пускового стержня 851 к вводному исполнительному механизму 850. Когда втулка 860 трансмиссии поворачивается в свое второе положение, как показано на ФИГ. 24-24В, зажимные зубцы 864a, 864b и 864с поворачиваются, входя в зацепление с фиксирующими плечами 854. При сравнении ФИГ. 23В и ФИГ. 24В можно увидеть, что втулка 860 шарнирного поворота была повернута примерно на 180 градусов и что зажимные зубцы 864a, 864b и 864c отклонили фиксирующие плечи 854 внутрь. В таком положении фиксирующие плечи 854 пускового стержня 851 были прижаты к вводному исполнительному механизму 850. Как показано на ФИГ. 24В, фиксирующие плечи 854 прижимаются внутрь до тех пор, пока зажимные зубцы 857 фиксирующих плеч 854, например, не входят в контакт друг с другом. В этот момент трансмиссия 860 находится в рабочем режиме шарнирного поворота, и вводной исполнительный механизм 850 может подавать пусковой стержень 851 дистально и/или возвращать пусковой стержень 851 проксимально для шарнирного поворота концевого эффектора узла ствола, как более подробно описано ниже.
Пусковой стержень 851 дополнительно содержит кольцевой фиксирующий паз 855, сформированный на его внешней поверхности. Пусковой стержень 851 имеет полусферическое поперечное сечение, и фиксирующий паз 855 проходит вокруг всей внешней поверхности пускового стержня 851. Аналогичным образом, штанга 841 шарнирного поворота дополнительно содержит кольцевой фиксирующий паз 845, сформированный на ее внешней поверхности. Штанга 841 шарнирного поворота также имеет полусферическое поперечное сечение, и фиксирующий паз 845 проходит вокруг всей внешней поверхности штанги 841 шарнирного поворота. Втулка 860 трансмиссии содержит выступающий внутрь фиксирующий элемент 865 привода, одновременно расположенный в фиксирующем пазу 855 пускового стержня 851 и фиксирующем пазу 845 штанги 841 шарнирного поворота, когда втулка 860 трансмиссии находится в своем первом положении, как показано на ФИГ. 23А. В таких случаях штанга 841 шарнирного поворота фиксируется на пусковом стержне 851 при прикреплении узла ствола к рукоятке, а пусковой стержень 851 находится в зацеплении с вводным исполнительным механизмом 850. При повороте втулки 860 трансмиссии из ее первого положения в направлении ее второго положения, как показано на ФИГ. 24А, фиксирующий элемент 865 привода выходит из зацепления с пусковым стержнем 851, и по мере вращения втулки 860 трансмиссии в ее второе положение фиксирующий элемент 865 привода скользит внутри фиксирующего паза 845 до тех пор, пока фиксирующий элемент 865 привода одновременно вновь не войдет в зацепление с пусковым стержнем 851 и штангой 841 шарнирного поворота.
Когда втулка 860 трансмиссии находится в своем втором положении, фиксирующий элемент 865 привода плотно размещен между боковыми стенками фиксирующего паза 845 штанги шарнирного поворота и фиксирующего паза 855 пускового стержня. В таких случаях проксимальное и/или дистальное перемещение вводного исполнительного механизма 850 передается на штангу 841 шарнирного поворота посредством фиксирующего элемента 865 привода втулки 860 трансмиссии. При выдвижении штанги 841 шарнирного поворота дистально с помощью вводного исполнительного механизма 850 штанга 841 шарнирного поворота поворачивает концевой эффектор узла ствола в первом направлении, и при втягивании штанги 841 шарнирного поворота проксимально вводным исполнительным механизмом 850 штанга 841 шарнирного поворота поворачивает концевой эффектор во втором направлении. Следует понимать, что пусковой стержень 851 и штанга 841 шарнирного поворота перемещаются вместе синхронно при передаче движения вводного исполнительного механизма 850 на штангу 841 шарнирного поворота посредством втулки 860 трансмиссии. Несмотря на то что пусковой стержень 851 смещается для шарнирного поворота концевого эффектора, движения пускового стержня 851 в рабочем режиме шарнирного поворота недостаточно для выталкивания скоб из кассеты со скобами. Когда оператор хирургического инструмента удовлетворен положением концевого эффектора, втулку 860 трансмиссии можно поворачивать в ее третье положение для переключения втулки 860 трансмиссии из ее рабочего режима шарнирного поворота в ее рабочий режим пуска. В различных случаях узел ствола может включать в себя фиксирующий элемент шарнирного поворота, выполненный с возможностью удержания концевого эффектора в заданном положении.
При повороте втулки 860 трансмиссии в ее третье положение, как показано на ФИГ. 25А и 25В, зажимной зубец 864а поворачивается и выходит из зацепления с фиксирующими плечами 854, зажимные зубцы 864b и 864c возвращаются в исходное положение относительно фиксирующих плеч 854, но остаются в зацеплении с фиксирующими плечами 854, и фиксирующее плечо 864d поворачивается и входит в зацепление с фиксирующими плечами 854. В результате втулка 860 трансмиссии удерживает фиксирующие плечи 854 в их прижатых положениях при повороте втулки 860 трансмиссии между ее вторым положением и ее третьим положением. Более того, фиксирующий элемент 865 привода поворачивается и выходит из фиксирующего паза 845 штанги 841 шарнирного поворота при повороте втулки 860 трансмиссии из ее второго положения в ее третье положение. В результате продольное перемещение вводного исполнительного механизма 850, пускового стержня 851 и втулки 860 трансмиссии не может передаваться штанге 841 шарнирного поворота. В этот момент пусковой стержень 851 может подаваться дистально с помощью вводного исполнительного механизма 850 для выталкивания скоб из кассеты со скобами во время пускового хода. Следует понимать, что вводной исполнительный механизм 850, пусковой стержень 851 и втулка 860 трансмиссии перемещаются относительно штанги 841 шарнирного поворота во время пускового хода. Чтобы согласовать такое относительное движение во время пускового хода, штанга 841 шарнирного поворота может включать в себя сформированный в ней продольный формирующий зазор паз 846, который выполнен с возможностью обеспечения относительного скольжения дистального конца 852 пускового стержня 850. Штанга 841 шарнирного поворота может также включать в себя сформированный в ней продольный формирующий зазор паз 844, который выполнен с возможностью обеспечения относительного скольжения фиксирующего зубца 864а втулки 860 трансмиссии во время пускового хода.
При выдвижении пускового стержня 851 дистально во время пускового хода фиксирующий паз 855 пускового стержня 851 больше не совмещается с фиксирующим пазом 845 штанги 841 шарнирного поворота. В результате втулка 860 трансмиссии не может возвратиться в свое второе положение до тех пор, пока пусковой стержень 851 не будет втянут и фиксирующий паз 855 вновь не совместится с фиксирующим пазом 845. После возвращения втулки 860 трансмиссии в ее второе положение фиксирующий элемент 865 привода вновь входит в зацепление со штангой 841 шарнирного поворота и вводной исполнительный механизм 850 может быть приведен в действие для обратного шарнирного поворота концевого эффектора или возврата концевого эффектора в его среднее положение. Чтобы разобщить узел ствола и рукоятку, втулку 850 трансмиссии можно повернуть обратно в ее первое положение, чтобы освободить фиксирующие плечи 854 от соединения с вводным исполнительным механизмом 850.
На ФИГ. 26-38 приведен узел 920 ствола для применения с узлом хирургического инструмента. Узел 920 ствола выполнен с возможностью разъемного прикрепления к рукоятке 910 (ФИГ. 30-38). Узел 920 ствола содержит проксимальный конец 921, выполненный с возможностью прикрепления к рукоятке 910, и дистальный конец 929, прикрепленный к концевому эффектору 930. Узел 920 ствола дополнительно содержит шарнирное сочленение 940, выполненное с возможностью обеспечения шарнирного поворота концевого эффектора 930. По меньшей мере, в одном случае шарнирное сочленение 940 содержит, например, гибкое соединение. Узел 920 ствола также содержит закрывающую трубку 924, выполненную с возможностью дистального перемещения для перевода бранши концевого эффектора 930, например, между открытым положением и закрытым положением. Узел 920 ствола также включает в себя пусковой элемент 950, который выполнен с возможностью дистального перемещения, например, для выталкивания скоб, которые хранятся с возможностью извлечения в кассете со скобами, расположенной в концевом эффекторе 930. Пусковой элемент 950 находится в функциональном зацеплении с гибким стержнем 959 скальпеля, который проходит через шарнирное сочленение 940.
Узел 920 ствола дополнительно содержит систему приведения в действие шарнирного сочленения. Система приведения в действие шарнирного сочленения содержит первый исполнительный механизм 960 шарнирного сочленения и второй исполнительный механизм 970 шарнирного сочленения. Первый исполнительный механизм 960 шарнирного сочленения содержит проксимальный конец 961 на проксимальном конце 921 узла 920 ствола и дистальный конец 969 на дистальном конце 929 узла 920 ствола. Дистальный конец 969 первого исполнительного механизма 960 шарнирного сочленения входит в зацепление с концевым эффектором 930 таким образом, что первый исполнительный механизм 960 шарнирного сочленения может осуществлять шарнирный поворот концевого эффектора 930 вокруг шарнирного сочленения 940. Второй исполнительный механизм 970 шарнирного сочленения содержит проксимальный конец 971 на проксимальном конце 921 узла 920 ствола и дистальный конец 979 на дистальном конце 929 узла 920 ствола. Дистальный конец 979 второго исполнительного механизма 970 шарнирного сочленения входит в зацепление с концевым эффектором 930 таким образом, что второй исполнительный механизм 970 шарнирного сочленения может осуществлять шарнирный поворот концевого эффектора 930 вокруг шарнирного сочленения 940.
В дополнение к указанному выше, как показано на ФИГ. 26-29, проксимальный конец 961 первого исполнительного механизма 960 шарнирного сочленения и проксимальный конец 971 второго исполнительного механизма 970 шарнирного сочленения изогнуты вовнутрь для зацепления и зажатия пускового элемента 950, когда узел 920 ствола не прикреплен к рукоятке 910. В подобных случаях первый исполнительный механизм 960 шарнирного сочленения, второй исполнительный механизм 970 шарнирного сочленения и пусковой элемент 950 с меньшей вероятностью будут случайно смещаться, например, при сборке узла 920 ствола с рукояткой 910. Пусковой элемент 950 содержит сформированное в нем углубление 953 для фиксатора. В различных случаях углубление 953 для фиксатора может быть кольцевым и может проходить вокруг пускового элемента 950. Первый исполнительный механизм 960 шарнирного сочленения содержит первый фиксирующий зубец 963, который расположен в углублении 953 для фиксатора, когда узел 920 ствола не прикреплен к рукоятке 910. Аналогичным образом, второй исполнительный механизм 970 шарнирного сочленения содержит второй фиксирующий зубец 973, который расположен в углублении 953 для фиксатора, когда узел 920 ствола не прикреплен к рукоятке 910. Углубление 953 для фиксатора, первый фиксирующий зубец 963 и второй фиксирующий зубец 973 выполнены таким образом, что относительное продольное движение между пусковым элементом 950, первым исполнительным механизмом 960 шарнирного сочленения и вторым исполнительным механизмом 970 шарнирного сочленения становится невозможным до тех пор, пока узел 920 ствола остается в сборе с рукояткой 910, как более подробно обсуждается ниже.
В дополнение к указанному выше, как показано преимущественно на ФИГ. 26 и 32, пусковой элемент 950 расположен между первым исполнительным механизмом 960 шарнирного сочленения и вторым исполнительным механизмом 970 шарнирного сочленения. Первый исполнительный механизм 960 шарнирного сочленения содержит первое углубление 964, выполненное с возможностью вхождения в него, по меньшей мере, части пускового элемента 950, когда узел 920 ствола не прикреплен к рукоятке 910. Аналогичным образом, второй исполнительный механизм 970 шарнирного сочленения содержит второе углубление 974, выполненное с возможностью вхождения в него, по меньшей мере, части пускового элемента 950, когда узел 920 ствола не прикреплен к рукоятке 910. В различных случаях первый исполнительный механизм 960 шарнирного сочленения и второй исполнительный механизм 970 шарнирного сочленения могут взаимодействовать для захвата, по меньшей мере, части пускового элемента 950, когда узел 920 ствола не прикреплен к рукоятке 910. В, по меньшей мере, одном подобном случае боковая стенка первого углубления 964 и боковая стенка второго углубления 974 могут упираться в пусковой элемент 950.
При сборке узла 920 ствола с рукояткой 910, как преимущественно показано на ФИГ. 33 и 34, первый исполнительный механизм 960 шарнирного сочленения и второй механизм 970 шарнирного сочленения смещаются наружу, или в боковом направлении, от пускового элемента 950. При смещении исполнительных механизмов 960 и 970 шарнирного сочленения в боковом направлении от пускового элемента 950, первый фиксирующий зубец 963 и второй фиксирующий зубец 973 выходят из углубления 953 для фиксатора. Более того, пусковой элемент 950 более не находится в первом углублении 964 первого исполнительного механизма 960 шарнирного сочленения или во втором углублении 974 второго исполнительного механизма 970 шарнирного сочленения. В этот момент пусковой элемент 950, первый исполнительный механизм 960 шарнирного сочленения и/или второй исполнительный механизм 970 шарнирного сочленения могут перемещаться относительно друг друга. Поступательное движение узла 920 ствола в сборе с рукояткой 910 представлено на ФИГ. 35-38 и более подробно описано ниже.
На ФИГ. 35 показан узел 920 ствола, расположенный над рукояткой 910. Как показано преимущественно на ФИГ. 30 и 31, рукоятка 910 включает в себя приемник 913 ствола, выполненный с возможностью вхождения в него проксимального конца 921 узла 920 ствола. Как показано преимущественно на ФИГ. 28, проксимальный конец 921 узла 920 ствола содержит вырез 923, сформированный в закрывающей трубке 924, который выполнен с возможностью соединения с приемником 913 ствола, как показано на ФИГ. 34. Как также показано на ФИГ. 28 и 34, пусковой элемент 950 узла 920 ствола соединен с пусковым стержнем 915 рукоятки 910, когда узел 920 ствола находится в сборе с рукояткой 910. Пусковой элемент 950 содержит проксимальный конец, или головку, 951, которая входит в выемку 911, сформированную в пусковом стержне 915. Пусковой элемент 950 дополнительно содержит суженную часть, или шейку, 952, которая входит в соответствующую суженную часть выемки 911. После того как проксимальная головка 951 пускового элемента 950 вошла в выемку 911 в пусковом стержне 915, пусковой стержень 915 может перемещать пусковой элемент 950 дистально, например, для выталкивания скоб из кассеты со скобами, расположенной в концевом эффекторе 930, а затем втягивать пусковой элемент 950 проксимально для возврата пусковой системы в исходное состояние.
Как опять же показано на ФИГ. 35, первый исполнительный механизм 960 шарнирного сочленения дополнительно содержит сформированную на нем первую кулачковую поверхность 966, которая контактирует с пусковым стержнем 915, когда узел 920 ствола находится в сборе с рукояткой 910. Аналогичным образом, второй исполнительный механизм 970 шарнирного сочленения дополнительно содержит сформированную на нем вторую кулачковую поверхность 976, которая контактирует с пусковым стержнем 915, когда узел 920 ствола находится в сборе с рукояткой 910. При перемещении узла 920 ствола вниз на рукоятку 910, как показано на ФИГ. 36, первая кулачковая поверхность 966 и вторая кулачковая поверхность 976 входят в контакт с пусковым стержнем 950, причем из-за взаимодействия кулачковых поверхностей 966 и 976 с пусковым стержнем 950 первый исполнительный механизм 960 шарнирного сочленения и второй исполнительный механизм 970 шарнирного сочленения разводятся в боковом направлении от пускового стержня 950. В подобных случаях первый исполнительный механизм 960 шарнирного сочленения совмещается с первым приводным элементом 916 шарнирного сочленения рукоятки 910, а второй исполнительный механизм 970 шарнирного сочленения совмещается со вторым приводным элементом 917 шарнирного сочленения рукоятки 910.
В дополнение к указанному выше первый исполнительный механизм 960 шарнирного сочленения содержит сформированный в нем первый проем 962 привода, который совмещается с первым приводным штифтом 912, проходящим от первого приводного элемента 916 шарнирного сочленения при отклонении первого исполнительного механизма 960 шарнирного сочленения в боковом направлении, как показано на ФИГ. 36. Аналогичным образом, второй исполнительный механизм 970 шарнирного сочленения содержит сформированный в нем второй проем 972 привода, который совмещается со вторым приводным штифтом 912, проходящим от второго приводного элемента 917 шарнирного сочленения при отклонении второго исполнительного механизма 970 шарнирного сочленения в боковом направлении, как также показано на ФИГ. 36. По мере того как узел 920 ствола далее заходит в рукоятку 910, как показано уже на ФИГ. 37, приводные штифты 912 входят в зацепление с проемами 962, 972 привода. В этот момент первый исполнительный механизм 960 шарнирного сочленения входит в функциональное зацепление с первым приводным элементом 916 шарнирного сочленения, а второй исполнительный механизм 970 шарнирного сочленения входит в функциональное зацепление со вторым приводным элементом 917 шарнирного сочленения. Кроме того, в этот момент пусковой элемент 950 пока еще не вошел в функциональное зацепление с пусковым стержнем 915, что не произойдет до момента полного размещения узла 920 ствола на рукоятке 910, как показано на ФИГ. 38. В различных альтернативных вариантах осуществления пусковой элемент 950 может входить в функциональное зацепление с пусковым стержнем 915 в то же время, когда исполнительные механизмы 960, 970 шарнирного сочленения входят в функциональное зацепление с приводными элементами 916, 917 шарнирного сочленения соответственно. В других альтернативных вариантах осуществления пусковой элемент 950 может входить в функциональное зацепление с пусковым стержнем 915 до того, как исполнительные механизмы 960, 970 шарнирного сочленения входят в функциональное зацепление с приводными элементами 916, 917 шарнирного сочленения соответственно.
При отсоединении узла 920 ствола от рукоятки 910 проемы 962, 972 привода исполнительных механизмов 960, 970 шарнирного сочленения выходят из зацепления с приводными штифтами 912 приводных элементов 916, 917 шарнирного сочленения. Аналогичным образом, проксимальная головка 951 пускового элемента 950 выходит из зацепления с выемкой 911, сформированной в пусковом стержне 915, при отсоединении узла 920 ствола от рукоятки 910. В подобных случаях исполнительные механизмы 960, 970 шарнирного сочленения более не удерживаются в своих разведенных или боковых положениях пусковым стержнем 915. Исполнительные механизмы 960, 970 шарнирного сочленения могут упруго возвращаться в свои изогнутые положения, чтобы вновь войти в зацепление и зажать пусковой элемент 950. Исполнительные механизмы 960, 970 шарнирного сочленения могут вновь фиксироваться на пусковом элементе 950, когда фиксирующие зубцы 963, 973 исполнительных механизмов 960, 970 шарнирного сочленения вновь входят в зацепление с углублением 953 для фиксатора, сформированным в пусковом элементе 950.
На ФИГ. 39 и 40 изображена переключаемая трансмиссия 1000. Переключаемая трансмиссия 1000 выполнена с возможностью переключения хирургического инструмента между первым рабочим режимом и вторым рабочим режимом. В, по меньшей мере, одном случае первый рабочий режим включает рабочий режим шарнирного поворота для шарнирного поворота концевого эффектора хирургического инструмента, а второй рабочий режим включает рабочий режим пуска для выталкивания скоб, которые хранятся с возможностью извлечения в кассете со скобами, расположенной в концевом эффекторе. Например, рукоятка хирургического инструмента может содержать вводной исполнительный механизм 1020, который выполнен с возможностью передачи движения ввода на трансмиссию 1000. Вводной исполнительный механизм 1020 содержит дистальный конец 1022, соединенный с проксимальным концом 1012 звена 1010 трансмиссии. Дистальный конец 1022 вводного исполнительного механизма 1020 содержит паз 1024 типа «ласточкин хвост», а проксимальный конец 1012 звена 1010 трансмиссии содержит выступ 1014 типа «ласточкин хвост», который помещается с возможностью скольжения в паз 1024 типа «ласточкин хвост». Паз 1024 типа «ласточкин хвост» и выступ 1014 типа «ласточкин хвост» образуют выполненное с возможностью скольжения соединение типа «ласточкин хвост», которое ограничивает движение звена 1010 трансмиссии относительно вводного исполнительного механизма 1020. В различных случаях движение звена 1010 трансмиссии ограничивается, например, осью 1019 переключения.
Звено 1010 трансмиссии 1000 выполнено с возможностью переключения между первым положением (ФИГ. 39) и вторым положением (ФИГ. 40). Звено 1010 трансмиссии выполнено с возможностью перемещения любыми приемлемыми средствами. В определенных случаях звено 1010 трансмиссии расположено на узле ствола хирургического инструмента, причем узел ствола может дополнительно включать в себя исполнительный механизм, выполненный с возможностью перемещения звена 1010 трансмиссии между его первым положением (ФИГ. 39) и его вторым положением (ФИГ. 40). В, по меньшей мере, одном случае исполнительный механизм может содержать соленоид, который может, например, проталкивать звено 1010 трансмиссии в его второе положение и возвращать звено трансмиссии в его первое положение. Когда звено 1010 трансмиссии находится в своем первом положении, звено 1010 трансмиссии обеспечивает функциональное зацепление вводного исполнительного механизма 1020 с исполнительным механизмом 1060 шарнирного сочленения, как описано более подробно ниже. Как также подробно описано ниже, звено 1010 трансмиссии обеспечивает функциональное зацепление вводного исполнительного механизма 1020 с пусковым исполнительным механизмом 1050, когда звено 1010 трансмиссии находится в своем втором положении.
Звено 1010 трансмиссии содержит дистальный конец 1011, выполненный с возможностью селективного зацепления с проксимальным концом 1061 исполнительного механизма 1060 шарнирного сочленения. В частности, в, по меньшей мере, одном случае проксимальный конец 1061 исполнительного механизма 1060 шарнирного сочленения содержит зубчатый конец 1063, который с возможностью скольжения размещен в зубчатой выемке 1013, сформированной в дистальном конце 1011 звена 1010 трансмиссии, когда звено 1010 трансмиссии находится в своем первом положении. В таких случаях вводной исполнительный механизм 1020 может проталкивать звено 1010 трансмиссии и исполнительный механизм 1060 шарнирного сочленения дистально для шарнирного поворота концевого эффектора в первом направлении и возвращать звено 1010 трансмиссии и шарнирное звено 1060 проксимально для шарнирного поворота концевого эффектора во втором, или противоположном, направлении. Когда звено 1010 трансмиссии находится в функциональном зацеплении с исполнительным механизмом 1060 шарнирного сочленения, звено 1010 трансмиссии может не входить в зацепление с пусковым исполнительным механизмом 1050. В результате звено 1010 трансмиссии может не приводить в движение пусковой исполнительный механизм 1050 при перемещении исполнительного механизма 1060 шарнирного сочленения звеном 1010 трансмиссии. В различных примерах вводной исполнительный механизм 1020 может выдвигаться дистально на расстояние S для шарнирного поворота концевого эффектора, не вступая в контакт с пусковым исполнительным механизмом 1050.
При перемещении звена 1010 трансмиссии в его второе положение в дополнение к указанному выше дистальный конец 1011 звена 1010 трансмиссии входит в зацепление с проксимальным концом 1051 пускового исполнительного механизма 1050. В частности, в, по меньшей мере, одном случае проксимальный конец 1051 пускового исполнительного механизма 1050 содержит зубчатый конец 1053, который с возможностью скольжения размещен в зубчатой выемке 1013, сформированной в дистальном конце 1011 звена 1010 трансмиссии, когда звено 1010 трансмиссии находится в своем втором положении. В таких случаях вводной исполнительный механизм 1020 может проталкивать звено 1010 трансмиссии и пусковой исполнительный механизм 1050 дистально для выталкивания скоб, которые хранятся с возможностью извлечения в кассете со скобами в концевом эффекторе. Соответственно, вводной исполнительный механизм 1020 может втягивать звено 1010 трансмиссии и пусковой исполнительный механизм 1050 проксимально для возврата пускового исполнительного механизма 1050. Когда звено 1010 трансмиссии находится в функциональном зацеплении с пусковым исполнительным механизмом 1050, звено 1010 трансмиссии может не входить в зацепление с исполнительным механизмом 1060 шарнирного сочленения. В результате звено 1010 трансмиссии может не приводить в движение исполнительный механизм 1060 шарнирного сочленения при перемещении пускового исполнительного механизма 1050 звеном 1010 трансмиссии. В различных случаях вводной исполнительный механизм 1020 может выдвигаться дистально на расстояние S для выталкивания скоб, не вступая при этом в контакт с исполнительным механизмом 1060 шарнирного сочленения.
Примеры
Пример 1: система хирургического инструмента, содержащая рукоятку и узел ствола, разъемно прикрепленный к рукоятке и содержащий концевой эффектор, механизм высвобождения, содержащий фиксирующий элемент, причем такой механизм высвобождения выполнен с возможностью перемещения между первым положением и вторым положением, причем такой фиксирующий элемент входит в зацепление с рукояткой, когда механизм высвобождения находится в первом положении, и при этом такой фиксирующий элемент выходит из зацепления с рукояткой, когда механизм высвобождения находится во втором положении, и зацеп, выполненный с возможностью вхождения в зацепление с рукояткой при отсоединении узла ствола от рукоятки, причем такой зацеп выходит из зацепления с рукояткой после дополнительных манипуляций с механизмом высвобождения.
Пример 2: система хирургического инструмента по примеру 1, в которой рукоятка содержит раму рукоятки, причем такая рама рукоятки содержит углубление, и при этом зацеп выполнен с возможностью вхождения в зацепление с углублением при отсоединении узла ствола от рукоятки.
Пример 3: система хирургического инструмента по примерам 1 или 2, дополнительно содержащая смещающий элемент, выполненный с возможностью смещения механизма высвобождения в первое положение.
Пример 4: система хирургического инструмента по примерам 1, 2 или 3, в которой концевой эффектор содержит кассету со скобами, и при этом такая кассета со скобами содержит корпус кассеты и множество скоб, которые хранятся в нем с возможностью извлечения.
Пример 5: система хирургического инструмента, содержащая рукоятку, содержащую первый механизм высвобождения, и узел ствола, разъемно прикрепленный к рукоятке и содержащий концевой эффектор, второй механизм высвобождения, содержащий фиксирующий элемент, причем такой второй механизм высвобождения выполнен с возможностью перемещения между первым положением и вторым положением, причем такой фиксирующий элемент входит в зацепление с рукояткой, когда второй механизм высвобождения находится в первом положении, и при этом такой фиксирующий элемент высвобождается из рукоятки, когда второй механизм высвобождения находится во втором положении, и фиксирующий ограничитель, выполненный с возможностью предотвращения перемещения второго механизма высвобождения из первого положения во второе положение, пока первый механизм высвобождения на рукоятке и второй механизм высвобождения на узле ствола не будут приведены в действие одновременно.
Пример 6: система хирургического инструмента по примеру 5, дополнительно содержащая исполнительный механизм фиксирующего ограничителя, расположенный в узле ствола, причем такой исполнительный механизм фиксирующего ограничителя выполнен с возможностью перемещения фиксирующего ограничителя между зацепленным положением и расцепленным положением, при этом фиксирующий ограничитель входит в зацепление со вторым механизмом высвобождения, когда фиксирующий ограничитель находится в зацепленном положении, и при этом фиксирующий ограничитель выходит из зацепления со вторым механизмом высвобождения, когда фиксирующий стопор находится в расцепленном положении.
Пример 7: система хирургического инструмента по примеру 6, в которой исполнительный механизм фиксирующего ограничителя содержит соленоид.
Пример 8: система хирургического инструмента по примерам 5, 6 или 7, в которой концевой эффектор содержит кассету со скобами, и при этом такая кассета со скобами содержит корпус кассеты и множество скоб, которые хранятся в нем с возможностью извлечения.
Пример 9: система хирургического инструмента, содержащая концевой эффектор, ствол, шарнирное сочленение, причем концевой эффектор выполнен с возможностью поворота относительно ствола вокруг шарнирного сочленения, и рукоятку. Рукоятка содержит первое устройство вывода, второе устройство вывода, электродвигатель; трансмиссию, содержащую устройство ввода трансмиссии, функционально связанное с электродвигателем, и устройство вывода трансмиссии, селективно взаимодействующее с первым устройством вывода и вторым устройством вывода, и систему спускового механизма, выполненную с возможностью переключения трансмиссии, чтобы функционально расцеплять устройство вывода трансмиссии и первое устройство вывода и функционально зацеплять устройство вывода трансмиссии со вторым устройством вывода, причем система спускового механизма выполнена с возможностью фиксации первого устройства вывода в положении, когда устройство вывода трансмиссии находится в функциональном зацеплении со вторым устройством вывода.
Пример 10: система хирургического инструмента по примеру 9, в которой первое устройство вывода содержит привод шарнирного поворота, причем электродвигатель выполнен с возможностью перемещения первого устройства вывода и шарнирного поворота концевого эффектора, когда устройство вывода трансмиссии находится в функциональном зацеплении с первым устройством вывода.
Пример 11: система хирургического инструмента по примерам 9 или 10, в которой концевой эффектор содержит кассету со скобами, причем такая кассета со скобами включает в себя корпус кассеты и скобы, которые хранятся в корпусе кассеты с возможностью извлечения.
Пример 12: система хирургического инструмента по примеру 11, в которой второе устройство вывода содержит пусковой привод, причем электродвигатель выполнен с возможностью перемещения второго устройства вывода и выталкивания скоб из кассеты со скобами, когда устройство вывода трансмиссии находится в функциональном зацеплении со вторым устройством вывода.
Пример 13: система хирургического инструмента по примерам 9, 10, 11 или 12, в которой первое устройство вывода выполнено с возможностью взаимодействия с высвобождением со вторым устройством вывода.
Пример 14: система хирургического инструмента, содержащая рукоятку, содержащую корпус и контакт рукоятки, и узел ствола, выполненный с возможностью прикрепления к рукоятке и содержащий концевой эффектор, шарнирное сочленение, причем концевой эффектор выполнен с возможностью поворота вокруг шарнирного сочленения, исполнительный механизм шарнирного сочленения, функционально связанный с концевым эффектором, электродвигатель, выполненный с возможностью приведения в движение исполнительного механизма шарнирного сочленения, систему управления, выполненную с возможностью управления электродвигателем для шарнирного поворота концевого эффектора, и контакт ствола, выполненный с возможностью взаимодействия с контактом рукоятки, когда узел ствола собран на рукоятке, причем такая система управления выполнена с возможностью обнаружения взаимодействия контакта ствола с контактом рукоятки и предотвращения шарнирного поворота концевого эффектора до момента взаимодействия контакта ствола с контактом рукоятки.
Пример 15: система хирургического инструмента по примеру 14, в которой система управления выполнена с возможностью предотвращения запуска электродвигателя до момента взаимодействия контакта ствола с контактом рукоятки.
Пример 16: система хирургического инструмента по примерам 14 или 15, в которой узел ствола содержит источник питания, причем система управления выполнена с возможностью подачи электрического питания на электродвигатель от источника питания до момента сборки узла ствола на рукоятке, и при этом система управления выполнена с возможностью управления электродвигателем для удерживания концевого эффектора в шарнирно неповернутой конфигурации.
Пример 17: система хирургического инструмента по примеру 14, дополнительно содержащая источник питания, причем система управления выполнена с возможностью подачи электрического питания на электродвигатель от источника питания, и при этом система управления выполнена с возможностью управления электродвигателем для удерживания концевого эффектора в нужной шарнирно повернутой конфигурации.
Пример 18: система хирургического инструмента по примерам 14, 15, 16 или 17, в которой концевой эффектор содержит кассету со скобами, причем такая кассета со скобами включает в себя корпус кассеты и скобы, которые хранятся в корпусе кассеты с возможностью извлечения.
Пример 19: система хирургического инструмента, содержащая рукоятку, содержащую корпус, электродвигатель, содержащий выходной вал, и червячную шестерню, установленную на выходном валу, и узел ствола, выполненный с возможностью прикрепления к рукоятке и содержащий концевой эффектор, шарнирное сочленение, причем такой концевой эффектор может поворачиваться вокруг такого шарнирного сочленения, и исполнительный механизм шарнирного сочленения, функционально соединенный с концевым эффектором, причем такой исполнительный механизм шарнирного сочленения содержит рейку, которая выполнена с возможностью зацепления с червячной шестерней, когда узел ствола прикреплен к рукоятке.
Пример 20: система хирургического инструмента по примеру 19, в которой узел ствола содержит проксимальный конец, дистальный конец и продольную ось, проходящую между проксимальным концом и дистальным концом, и при этом узел ствола собирают на рукоятке в направлении, поперечном продольной оси и червячной шестерне.
Полные описания:
патента США № 5,403,312, озаглавленного ELECTROSURGICAL HEMOSTATIC DEVICE, выданного 4 апреля 1995 г.;
патента США № 7,000,818, озаглавленного SURGICAL STAPLING INSTRUMENT HAVING SEPARATE DISTINCT CLOSING AND FIRING SYSTEMS, выданного 21 февраля 2006 г.;
патента США № 7,422,139, озаглавленного MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK, выданного 9 сентября 2008 г.;
патента США № 7,464,849, озаглавленного ELECTRO-MECHANICAL SURGICAL INSTRUMENT WITH CLOSURE SYSTEM AND ANVIL ALIGNMENT COMPONENTS, выданного 16 декабря 2008 г.;
патента США № 7,670,334, озаглавленного SURGICAL INSTRUMENT HAVING AN ARTICULATING END EFFECTOR, выданного 2 марта 2010 г.;
патента США № 7,753,245, озаглавленного SURGICAL STAPLING INSTRUMENTS, выданного 13 июля 2010 г.;
патента США № 8,393,514, озаглавленного SELECTIVELY ORIENTABLE IMPLANTABLE FASTENER CARTRIDGE, выданного 12 марта 2013 г.;
заявки на патент США № 11/343 803, озаглавленной SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES; в настоящее время патента США № 7,845,537;
заявки на патент США № 12/031,573, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING RF ELECTRODES, поданной 14 февраля 2008 г.;
заявки на патент США № 12/031,873, озаглавленной END EFFECTORS FOR A SURGICAL CUTTING AND STAPLING INSTRUMENT, поданной 15 февраля 2008 г., в настоящее время патента США № 7,980,443;
заявки на патент США № 12/235,782, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT, в настоящее время патента США № 8,210,411;
заявки на патент США № 12/249,117, озаглавленной POWERED SURGICAL CUTTING AND STAPLING APPARATUS WITH MANUALLY RETRACTABLE FIRING SYSTEM, в настоящее время патента США № 8,608,045;
заявки на патент США № 12/647,100, озаглавленной MOTOR-DRIVEN SURGICAL CUTTING INSTRUMENT WITH ELECTRIC ACTUATOR DIRECTIONAL CONTROL ASSEMBLY, поданной 24 декабря 2009 г.; в настоящее время патента США № 8,220,688;
заявки на патент США № 12/893,461, озаглавленной STAPLE CARTRIDGE, поданной 29 сентября 2012 г., в настоящее время патента США № 8,733,613;
заявки на патент США № 13/036,647, озаглавленной SURGICAL STAPLING INSTRUMENT, поданной 28 февраля 2011 г., в настоящее время патента США № 8,561,870;
заявки на патент США № 13/118,241, озаглавленной SURGICAL STAPLING INSTRUMENTS WITH ROTATABLE STAPLE DEPLOYMENT ARRANGEMENTS, в настоящее время публикации заявки на патент США № 2012/0298719;
заявки на патент США № 13/524,049, озаглавленной ARTICULATABLE SURGICAL INSTRUMENT COMPRISING A FIRING DRIVE, поданной 15 июня 2012 г., в настоящее время публикации заявки на патент США № 2013/0334278;
заявки на патент США № 13/800,025, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
заявки на патент США № 13/800 067, озаглавленной STAPLE CARTRIDGE TISSUE THICKNESS SENSOR SYSTEM, поданной 13 марта 2013 г.;
публикации заявки на патент США № 2007/0175955, озаглавленной SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM, поданной 31 января 2006 г.; и
публикации заявки на патент США № 2010/0264194, озаглавленной SURGICAL STAPLING INSTRUMENT WITH AN ARTICULATABLE END EFFECTOR, поданной 22 апреля 2010 г., в настоящее время патента США № 8,308,040, включены в настоящий документ путем ссылки.
Хотя в настоящем документе описаны различные варианты осуществления устройств в их связи с определенными описанными вариантами осуществления, в отношении устройства могут быть реализованы различные модификации и изменения. Кроме того, в случае некоторых компонентов, для которых представлено описание материалов, можно применять другие материалы. Кроме того, в соответствии с различными вариантами осуществления один компонент может быть заменен множеством компонентов, а множество компонентов - одним компонентом для выполнения определенной функции или функций. Предполагается, что представленное выше описание и приложенная формула изобретения охватывают все указанные изменения и дополнения.
Устройства, описанные в настоящем документе, могут быть выполнены с возможностью утилизации после однократного применения, или они могут быть выполнены с возможностью многократного применения. Однако в любом случае устройство можно восстановить для повторного применения после, по меньшей мере, одного применения. Восстановление может включать любую комбинацию стадий разборки устройства, последующей очистки или замены конкретных частей и последующей повторной сборки. В частности, устройство можно разобрать и любое число конкретных деталей или частей устройства можно селективно заменить или удалить в любой комбинации. После очистки и/или замены конкретных частей устройство можно снова собрать для последующего применения либо в мастерской по восстановлению, либо силами хирургической бригады непосредственно перед хирургическим вмешательством. Специалистам в данной области будет очевидно, что для восстановления устройства можно использовать различные методики разборки, очистки, замены и повторной сборки. Применение таких методик, а также полученное восстановленное устройство целиком входят в объем настоящей заявки.
Предпочтительно описанный в настоящем документе предмет изобретения будет проходить обработку перед проведением хирургического вмешательства. Сначала, после получения нового или уже использованного инструмента, его при необходимости очищают. Затем инструмент можно стерилизовать. Согласно одному способу стерилизации инструмент помещают в закрытую и герметичную тару, такую как пластиковый пакет или пакет Тайвек (TYVEK). Затем тару и инструмент помещают в поле излучения, которое может проникать в тару, такого как гамма-излучение, рентгеновское излучение или быстрые электроны. Излучение уничтожает бактерии на инструменте и в таре. Стерилизованный инструмент можно затем хранить в стерильной таре. Герметичная тара сохраняет инструмент стерильным до его вскрытия в медицинском учреждении.
Хотя настоящее изобретение описано как имеющее примеры конфигураций, настоящее изобретение можно дополнительно модифицировать в пределах сущности и объема описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или адаптации изобретения с применением его общих принципов.
Любой патент, публикация или другой материал описания, полностью или частично, который указан как включенный в настоящий документ путем ссылки, включен в настоящий документ только в той степени, в какой включенный материал не противоречит существующим определениям, положениям или другому материалу описания, представленному в настоящем документе. Таким образом, описание, в прямой форме представленное в настоящем документе, в той мере, в которой это необходимо, превалирует над любой информацией, противоречащей материалу, включенному в настоящий документ путем ссылки. Любой материал или его часть, указанная как включенная в настоящий документ путем ссылки, но противоречащая существующим определениям, положениям или другому материалу описания, представленному в настоящем документе, будет включена в настоящий документ только в той мере, в которой между включенным материалом и существующим материалом описания не возникает противоречий.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА, СОДЕРЖАЩИЙ СИСТЕМУ ШАРНИРНОГО СОЧЛЕНЕНИЯ С ВОЗМОЖНОСТЬЮ БЛОКИРОВКИ | 2015 |
|
RU2708870C2 |
| ПОДДЕРЖИВАЮЩИЕ КОНСТРУКЦИИ ПУСКОВОЙ ШТАНГИ, ВЫПОЛНЕННОЙ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ, ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА | 2016 |
|
RU2727765C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С СИЛОИЗМЕРИТЕЛЬНЫМ УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ | 2016 |
|
RU2728896C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С УЛУЧШЕННЫМИ ЗАКРЫВАЮЩИМИ КОНСТРУКЦИЯМИ | 2015 |
|
RU2714166C2 |
| ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С ШАРНИРНО ПОВОРАЧИВАЕМЫМИ КОНЦЕВЫМИ ЭФФЕКТОРАМИ И УСОВЕРШЕНСТВОВАННЫМИ ОПОРНЫМИ КОНСТРУКЦИЯМИ ПУСКОВОЙ ШТАНГИ | 2015 |
|
RU2709116C2 |
| МОДУЛЬНЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ, ПРИВОДИМЫЕ В ДЕЙСТВИЕ ДВИГАТЕЛЕМ, С КОНСТРУКЦИЯМИ ИНДИКАЦИИ СТАТУСА | 2014 |
|
RU2651066C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВЕ КОМПОНЕНТА ПРИВОДНОЙ СИСТЕМЫ | 2016 |
|
RU2732986C2 |
| ХИРУРГИЧЕСКИЕ КОНЦЕВЫЕ ЭФФЕКТОРЫ С КОНСТРУКЦИЯМИ ДЛЯ ПРИНУДИТЕЛЬНОГО ОТКРЫТИЯ БРАНШЕЙ | 2016 |
|
RU2721646C2 |
| КОНСТРУКЦИИ СИСТЕМЫ ДВУХШАРНИРНОГО ПРИВОДА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ВОЗМОЖНОСТЬЮ ШАРНИРНОГО ПОВОРОТА | 2016 |
|
RU2717936C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВАНИИ ЭЛЕКТРИЧЕСКОГО ПАРАМЕТРА, СВЯЗАННОГО С ТОКОМ ДВИГАТЕЛЯ | 2016 |
|
RU2731410C2 |


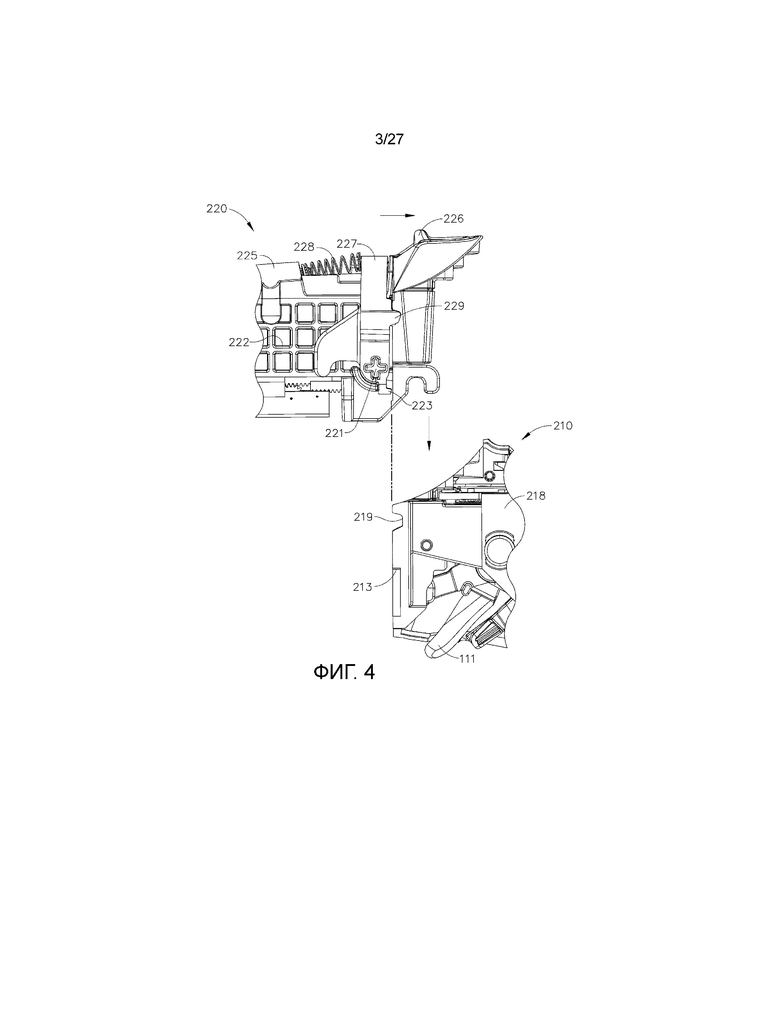
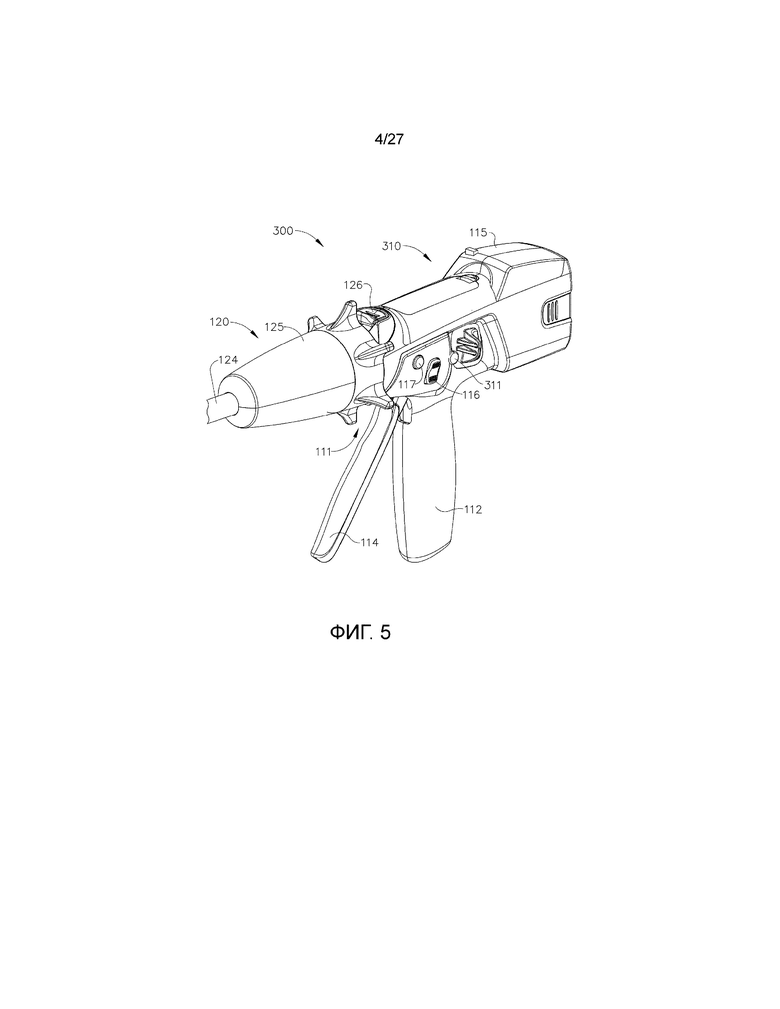


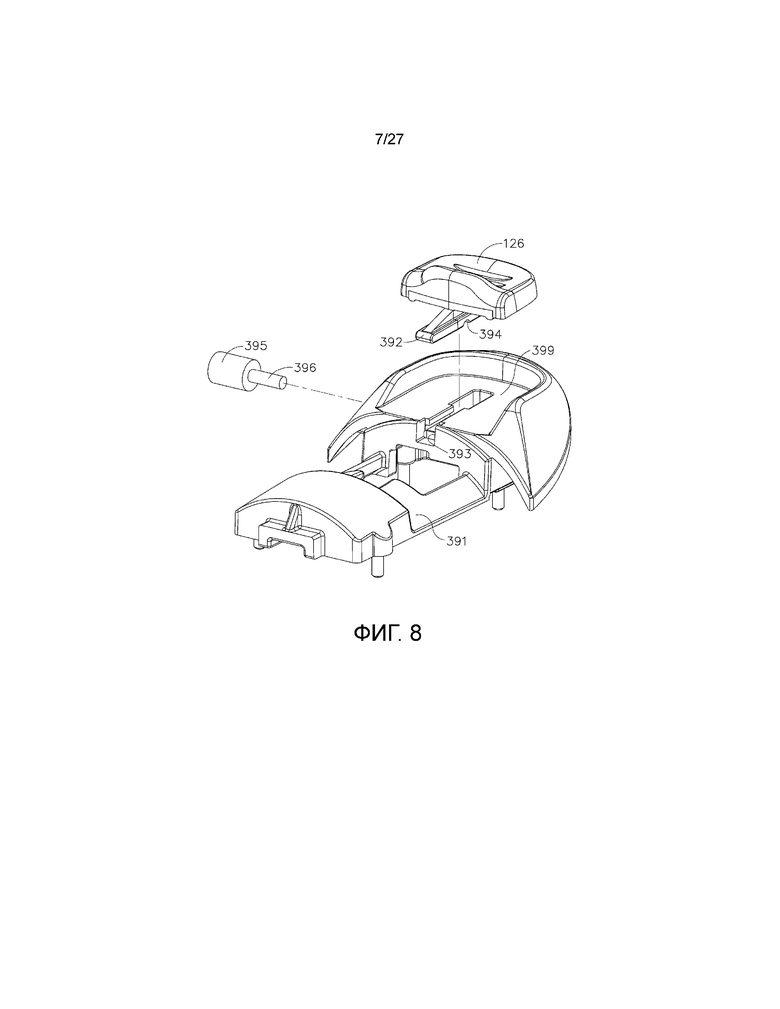
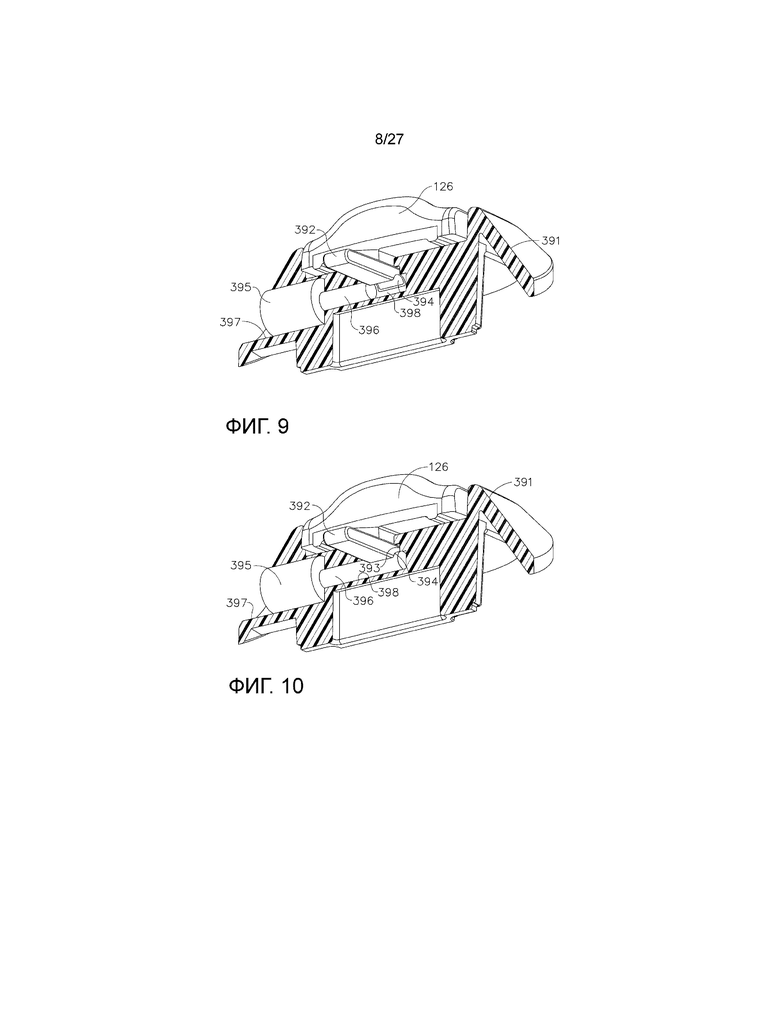



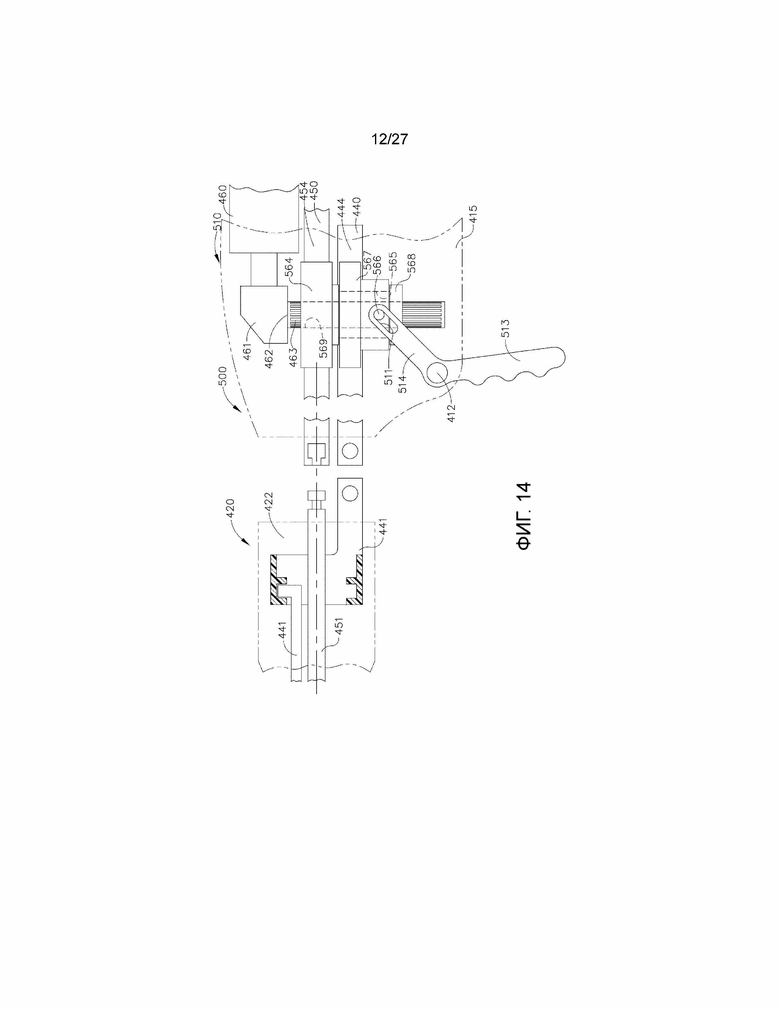




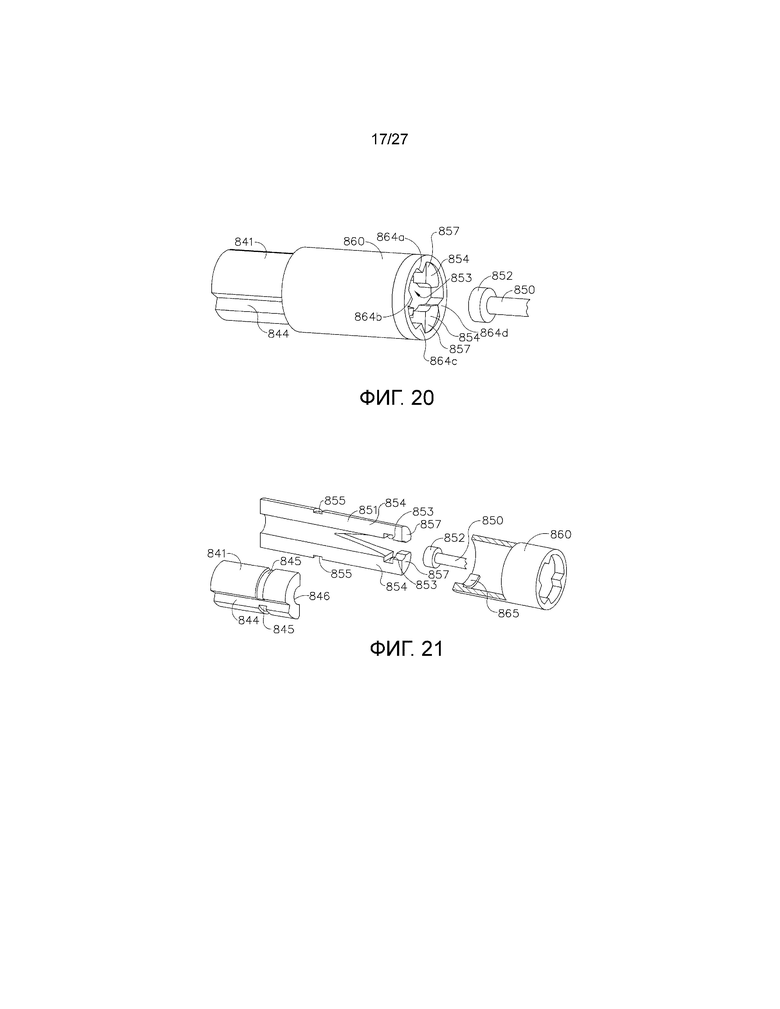
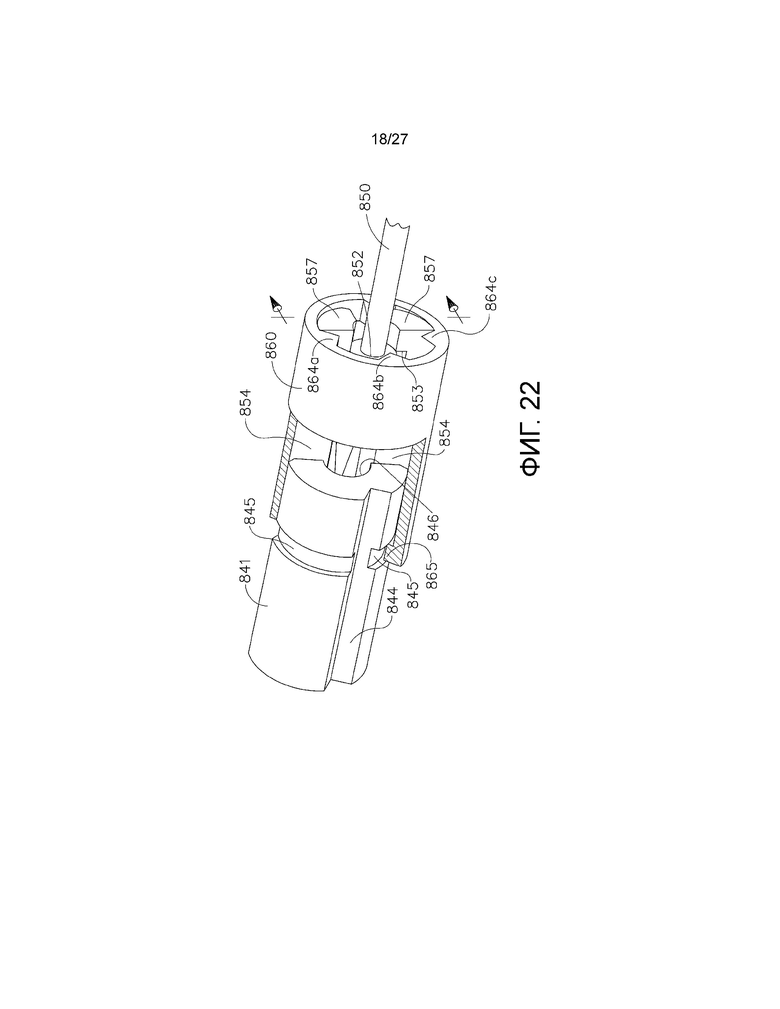








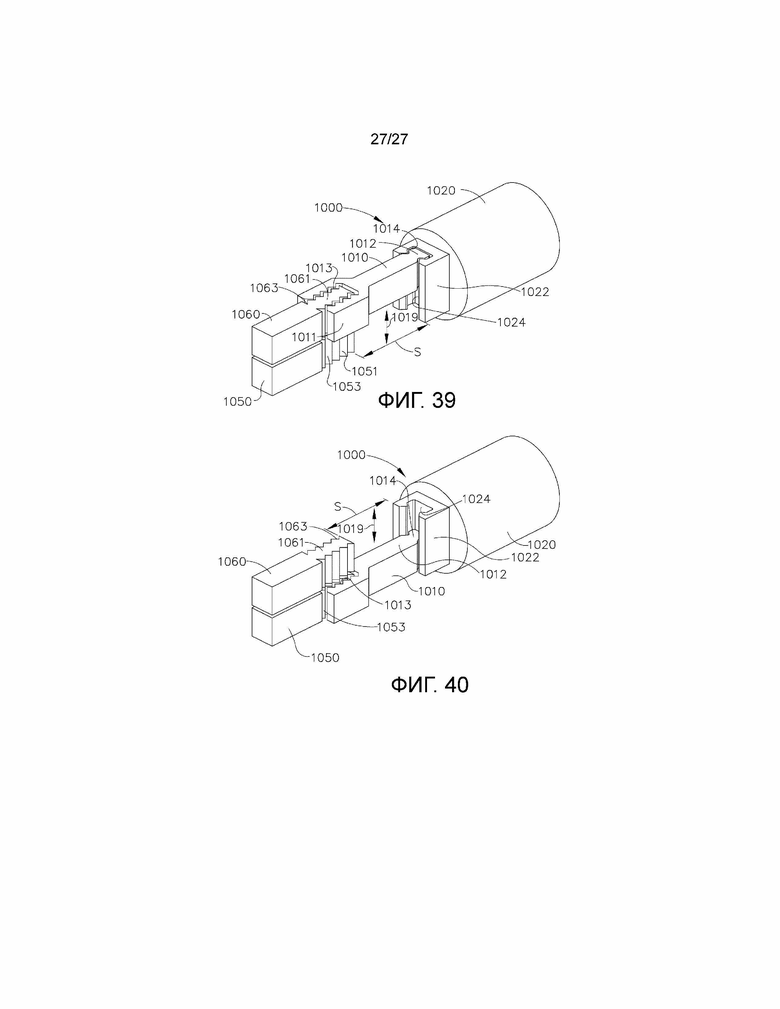
Группа изобретений относится к медицинской технике, а именно к хирургическим сшивающим и режущим инструментам и предназначенным для применения с ними кассетам со скобами. Система хирургического сшивающего инструмента содержит рукоятку, узел ствола и защелку. Узел ствола разъемно прикреплен к рукоятке. Узел ствола содержит концевой эффектор и механизм высвобождения. Механизм высвобождения содержит фиксирующий элемент. Механизм высвобождения выполнен с возможностью перемещения между проксимальным положением и дистальным положением. Фиксирующий элемент входит в зацепление с рукояткой, когда механизм высвобождения находится в проксимальном положении. Фиксирующий элемент выходит из зацепления с рукояткой, когда механизм высвобождения находится в дистальном положении. Защелка функционально взаимодействует с механизмом высвобождения. Защелка выполнена с возможностью перемещения между первым положением и вторым положением. Механизм высвобождения выполнен с возможностью поворота защелки из первого положения во второе положение при перемещении механизма высвобождения в направлении дистального положения. Защелка содержит зацеп, выполненный с возможностью зацепления с рукояткой при перемещении защелки в направлении второго положения. Зацеп выходит из зацепления с рукояткой после дополнительных манипуляций с механизмом высвобождения, и при этом дополнительные манипуляции осуществляются в проксимальном направлении. Во втором варианте выполнения система хирургического сшивающего инструмента содержит рукоятку и узел ствола. Рукоятка содержит первый механизм высвобождения. Узел ствола разъемно прикреплен к рукоятке. Узел ствола содержит концевой эффектор, второй механизм высвобождения и фиксирующий ограничитель. Второй механизм высвобождения содержит фиксирующий элемент. Второй механизм высвобождения выполнен с возможностью перемещения между первым положением и вторым положением. Фиксирующий элемент входит в зацепление с рукояткой, когда второй механизм высвобождения находится в первом положении. Фиксирующий элемент выходит из зацепления с рукояткой, когда второй механизм высвобождения находится в втором положении. Фиксирующий ограничитель выполнен с возможностью предотвращения перемещения второго механизма высвобождения из первого положения во второе положение, пока первый механизм высвобождения на рукоятке и второй механизм высвобождения на узле ствола не будут приведены в действие одновременно. Использование изобретений позволяет обеспечить возможность сшивания и разрезания ткани. 2 н. и 6 з.п. ф-лы, 40 ил.
1. Система хирургического сшивающего инструмента, содержащая:
рукоятку; и
узел ствола, разъемно прикрепленный к указанной рукоятке и содержащий:
концевой эффектор;
механизм высвобождения, содержащий фиксирующий элемент, причем указанный механизм высвобождения выполнен с возможностью перемещения между проксимальным положением и дистальным положением, при этом указанный фиксирующий элемент входит в зацепление с указанной рукояткой, когда указанный механизм высвобождения находится в указанном проксимальном положении, и при этом указанный фиксирующий элемент выходит из зацепления с указанной рукояткой, когда указанный механизм высвобождения находится в указанном дистальном положении; и
защелку, функционально взаимодействующую с указанным механизмом высвобождения, причем указанная защелка выполнена с возможностью перемещения между первым положением и вторым положением, и указанный механизм высвобождения выполнен с возможностью поворота указанной защелки из указанного первого положения в указанное второе положение при перемещении указанного механизма высвобождения в направлении указанного дистального положения, при этом указанная защелка содержит зацеп, выполненный с возможностью зацепления с указанной рукояткой при перемещении указанной защелки в направлении указанного второго положения, причем указанный зацеп выходит из зацепления с указанной рукояткой после дополнительных манипуляций с указанным механизмом высвобождения, и при этом указанные дополнительные манипуляции осуществляются в проксимальном направлении.
2. Система хирургического сшивающего инструмента по п.1, в которой указанная рукоятка содержит раму рукоятки, причем указанная рама рукоятки содержит углубление, и при этом указанный зацеп выполнен с возможностью вхождения в зацепление с указанным углублением при отсоединении указанного узла ствола от указанной рукоятки.
3. Система хирургического сшивающего инструмента по п.2, дополнительно содержащая смещающий элемент, выполненный с возможностью смещения указанного механизма высвобождения в указанное первое положение.
4. Система хирургического сшивающего инструмента по п.1, в которой указанный концевой эффектор содержит кассету со скобами, и при этом указанная кассета со скобами содержит корпус кассеты и скобы, которые хранятся в нем с возможностью извлечения.
5. Система хирургического сшивающего инструмента, содержащая:
рукоятку, содержащую первый механизм высвобождения; и
узел ствола, разъемно прикрепленный к указанной рукоятке и содержащий:
концевой эффектор;
второй механизм высвобождения, содержащий фиксирующий элемент, причем указанный второй механизм высвобождения выполнен с возможностью перемещения между первым положением и вторым положением, при этом указанный фиксирующий элемент входит в зацепление с указанной рукояткой, когда указанный второй механизм высвобождения находится в указанном первом положении, и при этом указанный фиксирующий элемент выходит из зацепления с указанной рукояткой, когда указанный второй механизм высвобождения находится в указанном втором положении; и
фиксирующий ограничитель, выполненный с возможностью предотвращения перемещения указанного второго механизма высвобождения из указанного первого положения в указанное второе положение, пока указанный первый механизм высвобождения на указанной рукоятке и указанный второй механизм высвобождения на указанном узле ствола не будут приведены в действие одновременно.
6. Система хирургического сшивающего инструмента по п.5, дополнительно содержащая исполнительный механизм фиксирующего ограничителя, расположенный в указанном узле ствола, причем указанный исполнительный механизм фиксирующего ограничителя выполнен с возможностью перемещения указанного фиксирующего ограничителя между зацепленным положением и расцепленным положением, при этом указанный фиксирующий ограничитель входит в зацепление с указанным вторым механизмом высвобождения, когда указанный фиксирующий ограничитель находится в указанном зацепленном положении, и при этом указанный фиксирующий ограничитель выходит из зацепления с указанным вторым механизмом высвобождения, когда указанный фиксирующий ограничитель находится в указанном расцепленном положении.
7. Система хирургического сшивающего инструмента по п.6, в которой указанный исполнительный механизм фиксирующего ограничителя содержит соленоид.
8. Система хирургического сшивающего инструмента по п.5, в которой указанный концевой эффектор содержит кассету со скобами, и при этом указанная кассета со скобами содержит корпус кассеты и скобы, которые хранятся в нем с возможностью извлечения.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| RU 2006103354 A, 20.08.2007 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ТЕХНОЛОГИЧЕСКИЙ СПОСОБ ПРОИЗВОДСТВА ПОРОШКА ЛИПИДНОГО ВОЛОКНА | 2018 |
|
RU2777522C2 |
| ПИЩЕВОЙ ПРОДУКТ В ВИДЕ ПАСТИЛЫ И СПОСОБ ЕГО ПРИГОТОВЛЕНИЯ | 2022 |
|
RU2792306C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

