Настоящее изобретение относится к устройству и способу контроля шин на линии по производству шин, в частности, посредством получения изображений внутренней поверхности шины и их дальнейшей обработки, например, для определения возможного наличия обнаруживаемых дефектов на поверхности шины.
«Контроль» означает контроль качества шин.
«Шина», как правило, означает готовую шину, то есть шину после этапов сборки, формования в пресс-форме и вулканизации, но, возможно, также невулканизированную (или «сырую») шину после этапа сборки и перед этапами формования в пресс-форме и/или вулканизации.
Как правило, шина имеет по существу тороидальную конструкцию относительно оси вращения шины во время эксплуатации и имеет осевую среднюю плоскость, ортогональную к оси вращения, при этом указанная плоскость, как правило, представляет собой (по существу) геометрическую плоскость симметрии (например, если игнорировать любые незначительные асимметрии, такие как в рисунке протектора и/или внутренней структуре).
Шина содержит каркасный конструктивный элемент, содержащий, по меньшей мере, один слой каркаса, имеющий соответственно противоположные концевые клапаны, введенные в контактное взаимодействие с соответствующими кольцевыми удерживающими конструктивными элементами, встроенными в концевых круглых частях шины, радиально внутренних и по существу ортогональных к оси вращения, обычных называемых наименованием «борта». В «бескамерных» шинах радиально внутренний слой каркаса покрыт внутри слоем эластомерного материала предпочтительно на основе бутила, обычно называемым «герметизирующим слоем», обладающим оптимальными характеристиками воздухонепроницаемости и проходящим от одного из бортов до другого. Один или более слоев брекера, имеющих текстильные или металлические армирующие корды, могут быть соединены с каркасным конструктивным элементом в месте, радиальном наружном по отношению к нему. Протекторный браслет наложен в радиальном направлении снаружи по отношению к слоям брекера. Соответствующие боковые вставки из эластомерного материала дополнительно наложены в аксиальном направлении снаружи на боковые поверхности слоя каркаса, при этом каждая боковая вставка проходит от одного из круговых концевых краев протекторного браслета до соответствующего кольцевого удерживающего конструктивного элемента в бортах.
«Корона» относится к той части шины, которая содержит протекторный браслет, слои брекера и соответствующую часть каркасного конструктивного элемента, радиально внутреннюю по отношению к ним.
«Боковина» означает одну из двух частей шины, расположенных напротив друг друга и проходящих по существу в радиальном направлении от противоположных сторон короны до бортов. Следовательно, каждая боковина содержит соответствующую часть каркасного конструктивного элемента и указанную боковую вставку.
«Плечевая зона» означает каждую часть шины, соединяющую корону и соответствующую боковину (другими словами, две плечевые зоны расположены на двух, радиально и аксиально наружных круговых «краях» шины). Каждая плечевая зона имеет протяженность в направлении вдоль окружности в плоскости, по существу ортогональной к оси вращения.
Наружная или внутренняя поверхность шины соответственно означает поверхность, которая остается видимой после соединения шины с соответствующим ей, монтажным ободом, и поверхность, которая больше не является видимой после указанного соединения.
Термин «внутреннее пространство» шины относится к множеству точек, посредством которых прямая линия, проходящая через рассматриваемую точку и параллельная оси шины, пересекает шину в двух секциях, расположенных с противоположных сторон по отношению к рассматриваемой точке.
Термин «длительность цикла» на производственной линии, содержащей, по меньшей мере, одну рабочую станцию, предпочтительно множество рабочих станций и включенной в установку для изготовления шин, относится к определяемому при полной производительности, максимальному времени прохождения изготавливаемой шины через рабочую станцию, за которое собирают, по меньшей мере, часть компонента самой шины. Например, длительность цикла может находиться в диапазоне между приблизительно 20 и приблизительно 120 секундами.
Термины «нижний», «верхний», «под» и «над» указывают относительное положение элемента, такого как компонент шины, шина, устройство, приспособление и т.д., относительно грунта во время использования или положение одного из указанных элементов относительно другого элемента.
Под «по существу ортогональными» по отношению к геометрическим элементам (таким как прямые линии, плоскости, поверхности и т.д.) подразумевается то, что данные элементы образуют угол, составляющий 90°±15°, предпочтительно 90°±10°.
Под «по существу параллельными» по отношению к указанным геометрическим элементам подразумевается то, что данные элементы образуют угол, составляющий 0°±15°, предпочтительно 0°±10°.
Под «углом, образованным прямой линией и плоскостью», подразумевается острый угол, образованный прямой линией и ее ортогональной проекцией на плоскости.
Под «углом, образованным прямой линией и поверхностью», подразумевается острый угол, образованный прямой линией и ее ортогональной проекцией на плоскости, касательной к данной поверхности в точке пересечения с данной прямой линией.
Под «углом, образованным двумя прямыми линиями» подразумевается острый угол, образованный данными двумя прямыми линиями, если они соединяются в некоторой точке. Если две прямые линии находятся под углом, это означает острый угол, образованный двумя прямыми линиями, проходящими через одну и ту же точку и параллельными соответствующим двум заданным прямым линиям.
Термины «оптическое», «световое» и аналогичные относятся к используемому электромагнитному излучению, которое имеет, по меньшей мере, часть спектра, находящуюся в расширенной окрестности оптического диапазона и необязательно находящуюся строго в пределах оптического диапазона (то есть, 400-700 нм), например, такая расширенная окрестность оптического диапазона могут охватывать от ультрафиолетовой до инфракрасной области спектра (например, при длине волны, находящейся в диапазоне от приблизительно 100 нм до приблизительно 1 мкм).
Под «цифровым изображением» или эквивалентно «изображением» обычно подразумевается набор данных, как правило, содержащихся в компьютерном файле, в котором каждый кортеж координат (как правило, каждая пара координат) из конечной совокупности (как правило, двумерной и матричной, то есть N строк × М столбцов) кортежей пространственных координат (при этом каждый кортеж соответствует пикселю) связан с соответствующим набором числовых значений (которые могут характеризовать различные величины). Например, в монохромных изображениях (подобных изображениям в уровнях серого или «шкале серого») такой набор значений состоит из одного значения на конечной шкале (как правило, с 256 уровнями или тонами), при этом данное значение характеризует, например, уровень светлоты (или интенсивности) соответствующего кортежа пространственных координат при отображении. Дополнительным примером являются цветные изображения, в которых набор значений характеризует уровень светлоты множества цветов или каналов, как правило, основных цветов (например, красного, зеленого и синего в кодировке RGB и голубого, пурпурного, желтого и черного в кодировке CMYK). Термин «изображение» необязательно означает его реальное отображение.
Любая ссылка на конкретное «цифровое изображение» (например, на цифровое изображение, первоначально полученное на шине) охватывает в более общем смысле любое цифровое изображение, получаемое посредством одной или более операций цифровой обработки указанного конкретного цифрового изображения (например, таких как фильтрация, выравнивание, сглаживание, бинаризация, сравнение с порогом, морфологические преобразования (открытие и т.д.), вычисление производных или интегралов и т.д.).
Термин «двумерное изображение» или ʺ2Dʺ поверхности означает цифровое изображение, каждому пикселю которого соответствуют данные, характеризующие отражательную/рассеивающую способность и/или цвет поверхности, такое как изображения, регистрируемые обычными камерами или цифровыми камерами (например, на ПЗС).
Термин «трехмерное изображение» или «3D» поверхности означает цифровое изображение, каждому пикселю которого соответствуют данные о высоте поверхности.
«Цифровая камера» или кратко «камера» означает оптоэлектронное устройство, выполненное с возможностью получения двумерного цифрового изображения и включающее в себя датчик цифровых изображений (или кратко «датчик»), который определяет плоскость изображения, и объектив (который, как предполагается, предусмотрен с цилиндрической симметрией, хотя изобретение не ограничено только данными объективами).
«Датчик» означает набор фоточувствительных элементов (называемых «пикселями»), способных преобразовывать падающий свет в электрический сигнал, например, посредством технологии ПЗС или КМОП. Термин «пиксель» используется для обозначения как одного фоточувствительного элемента датчика, так и одного элемента, формирующего цифровое изображение, определенное выше, при этом каждый пиксель датчика, как правило, соответствует пикселю изображения.
«Матричная камера» означает камеру, датчик которой имеет пиксели, расположенные в соответствии с прямоугольной матрицей, имеющей два размера сопоставимой величины (например, два размера различаются менее чем на один порядок величины, как в форматах 4×3 или 3×2). Как правило, диагональ матрицы чувствительных элементов имеет длину, составляющую несколько десятков миллиметров. Следовательно, «матричное» изображение представляет собой двумерное цифровое изображение, полученное матричной камерой.
«Оптическая ось» объектива означает линию, вдоль которой существует вращательная симметрия объектива.
«Фокальная плоскость» или «плоскость фокусировки» камеры представляет собой плоскость точек объекта, которые фокусируются посредством объектива на датчик, то есть лучи, выходящие из каждой точки объекта в фокальной плоскости, сходятся в соответствующей точке на плоскости датчика (плоскости изображения).
«Глубина резкости» означает совокупность плоскостей в окрестности фокальной плоскости, каждая точка которых, будучи спроецированной посредством объектива на плоскость датчика, формирует изображение, вписанное в заданный кружок рассеяния (например, имеющий диаметр 5-10 микрон).
«Линейный лазерный источник» означает лазерный источник, выполненный с возможностью излучения линейного лазерного пучка, то есть лазерного пучка, лежащего в «плоскости распространения» и имеющего «ось распространения», принадлежащую плоскости распространения и проходящую через лазерный источник, в качестве его направления распространения. Пересечение линейного лазерного пучка с физической поверхностью, имеющей отражательную/рассеивающую способностью, такой как поверхность шины, и не совпадающей с плоскостью распространения, образует «линию излучения лазера».
«Отраженная линия излучения лазера» представляет собой изображение указанной линии излучения лазера на поверхности в пределах изображения, полученного камерой.
«Линейный участок поверхности» означает участок поверхности, имеющий один размер, значительно больший, чем другой размер, определяемый в направлении, ортогональном к направлению данного одного размера, и, как правило, превышающий другой размер, по меньшей мере, на два порядка величины. Меньший размер линейного участка поверхности, как правило, меньше или равен 0,1 мм.
Под «отражающей поверхностью» отражающего элемента подразумевается как реальная отражающая поверхность, как в случае зеркала, так и эквивалентная отражающая поверхность, как в случае отражающей призмы, в которой используется, по меньшей мере, одно внутреннее отражение (посредством полного отражения или посредством зеркальной обработки, по меньшей мере, одной внутренней поверхности), или преломляющей призмы, которая отклоняет луч за счет преломления. Действительно, может быть смоделирована призма с эквивалентной отражающей поверхностью, которая ведет себя при отражении подобно призме (для заданной длины волны лазера).
В области процессов производства и сборки шин для колес транспортных средств ощущается потребность в выполнении контроля качества изготовленных изделий с целью предотвращения попадания дефектных шин или шин, не отвечающих техническим требованиям, на рынок и/или для последовательного регулирования используемых устройств и оборудования для улучшения и оптимизации выполнения операций, выполняемых в производственном процессе.
Данные операции контроля качества включают, например, те, которые выполняются операторами, которые тратят фиксированное время на визуальную и тактильную проверку шины; если с учетом его собственного опыта и чувствительности оператор заподозрит, что шина не соответствует определенным стандартам качества, та же шина будет подвергнута дополнительным проверкам посредством более детального осмотра человеком и/или посредством соответствующего оборудования для более глубокой оценки любых недостатков с точки зрения конструкции и/или качества.
В документе WO 2015/122295 А1 описано устройство для получения трехмерных изображений внутренней поверхности шины, содержащее источник света, зеркало и камеру и выполненное с такой конфигурацией, что зеркало вращается вокруг оси вращения после вставки в полость шины.
В документе WO 2015/044196 А1 описано устройство для получения трехмерных изображений внутренней поверхности шины, содержащее лазерные осветительные средства, средства получения изображений и отражатель, оптически расположенный между осветительными средствами и освещаемой зоной поверхности шины. Лазерные осветительные средства выполнены с возможностью проецирования освещающей линии на поверхность шины, и средства получения изображений содержат матричную камеру, ориентированную в соответствии с триангуляционным углом, образованным между оптической осью лазера и оптической осью камеры.
В области контроля качества шин Заявитель поставил перед собой проблему контроля внутренней поверхности шины посредством оптического получения ее цифровых изображений и их последующей обработки, например, для обнаружения возможного наличия дефектов на или вблизи поверхности. Отыскиваемые дефекты могут представлять собой, например, неровности поверхности или на поверхности шины (невулканизированную смесь, изменения формы и т.д.), неоднородность структуры, разрезы, наличие посторонних предметов на поверхности и т.д.
В частности, Заявитель полагает, что предпочтительными являются получение и анализ трехмерных изображений внутренней поверхности шины.
Например, 3D-технология (в особенности с высоким разрешением, например, с разрешением, которое меньше или равно 10 микронам) может быть использована для обнаружения отклонений трехмерной формы, нехваток или выступов материала на внутренней поверхности шин, как правило, нехватки или пузырьков, или также некоторых элементов, таких как выступающие надписи и насечка.
Заявитель отметил, что для использования контроля в едином масштабе времени в установке для производства шин сам контроль должен выполняться за уменьшенное время, которое меньше указанной длительности цикла или соответствует ей, и со сниженными затратами и/или габаритными размерами.
Заявитель осознал, что в способах контроля качества шин посредством оптического получения 3D-изображений внутренней поверхности шины посредством технологии лазерной триангуляции, в частности, особенно труднодоступных участков внутренней поверхности, таких как внутренняя часть боковины или внутренняя часть борта или внутренняя часть плечевой зоны, трудно обеспечить надлежащее освещение линейным лазерным пучком и получение матричного изображения участка поверхности, на который падает линия излучения лазера, в особенности вследствие огромного разнообразия шин, подлежащих контролю, с очень разными размерными характеристиками (большими различиями размерных параметров, таких как наружный и внутренний диаметры, посадочный диаметр, хорды, расстояния между бортами, различные формы и ширина боковин и т.д.).
Заявитель также осознал, что ввиду подобных трудностей устройства для получения трехмерных изображений, описанные в WO 2015/122295 А1 и WO 2015/044196 А1, являются слишком сложными по конструкции и/или функционированию и/или чрезмерно громоздкими или тяжелыми. Все это затрудняет встраивание подобных устройств в промышленную производственную линию, так как возникли бы конкретные риски столкновений между указанными устройствами получения изображений (вследствие их веса и размеров), в то время как затраты (например, более высокие эксплуатационные затраты) и/или время выполнения (например, большее число случаев простоя) будут стремиться к увеличению.
Заявитель осознал, что решение проблемы, указанной выше, может быть обеспечено посредством другой конструкции системы получения изображений в отношении расположения отражающего элемента.
Более точно, Заявитель обнаружил, что при размещении отражающей поверхности отражающего элемента так, чтобы она образовывала первый тупой угол между оптической осью камеры до и после отражения на отражающей поверхности и второй тупой угол между осью распространения линейного лазерного пучка до и после отражения на отражающей поверхности, можно получить компактное устройство получения 3D-изображений, легко перемещаемое в пространстве и гибкое, поскольку оно выполнено с возможностью вставки в шину для получения изображений трех разных зон: внутренней части плечевой зоны, внутренней части боковины и внутренней части борта.
В соответствии с его первым аспектом изобретение относится к устройству для контроля шин.
Предпочтительно, предусмотрена опорная рама.
Предпочтительно, предусмотрен фланец, закрепленный на опорной раме и предназначенный для прикрепления указанной опорной рамы к элементу для обеспечения перемещения устройства.
Предпочтительно, предусмотрена система получения изображений, предназначенная для получения трехмерных изображений поверхности шины, при этом указанная система получения изображений смонтирована на указанной опорной раме.
Указанная система получения изображений предпочтительно содержит матричную камеру, имеющую оптическую ось.
Указанная система получения изображений предпочтительно содержит линейный лазерный источник, выполненный с возможностью излучения линейного лазерного пучка, имеющего плоскость распространения и ось распространения.
Указанная система получения изображений предпочтительно содержит отражающий элемент, имеющий отражающую поверхность, которая пересекает как указанную ось распространения, так и указанную оптическую ось так, чтобы соответственно задать первый участок и второй участок указанной оси распространения и первый участок и второй участок указанной оптической оси.
Первый участок и второй участок оси распространения предпочтительно представляют собой прямолинейные участки, падающие на отражающую поверхность в соответствующей точке падения, при этом первый участок и второй участок оси распространения представляют собой зеркальное отображение друг друга по отношению к линии, перпендикулярной к отражающей поверхности в указанной соответствующей точке падения.
Первый участок и второй участок оптической оси предпочтительно представляют собой прямолинейные участки, падающие на отражающую поверхность в соответствующей точке падения, при этом первый участок и второй участок оптической оси представляют собой зеркальное отображение друг друга по отношению к линии, перпендикулярной к отражающей поверхности в указанной соответствующей точке падения.
Первые участки предпочтительно расположены соответственно со стороны матричной камеры и линейного лазерного источника относительно соответствующей точки падения.
Первый угол, образованный между указанными первым участком и вторым участком указанной оптической оси, предпочтительно является тупым.
Второй угол, образованный между указанными первым участком и вторым участком указанной оси распространения, предпочтительно является тупым.
В соответствии с его вторым аспектом изобретение относится к способу контроля шин.
Предпочтительно, предусмотрено размещение шины, подлежащей контролю.
Предпочтительно, предусмотрено размещение устройства для контроля шин согласно первому аспекту изобретения в любом варианте его осуществления.
Предпочтительно, предусмотрена вставка, по меньшей мере, указанного отражающего элемента во внутреннее пространство указанной шины.
Предпочтительно, предусмотрено освещение линейного участка внутренней поверхности указанной шины посредством указанного линейного лазерного пучка так, чтобы образовать линию излучения лазера.
Предпочтительно, предусмотрено получение матричного изображения участка поверхности, содержащего указанный линейный участок внутренней поверхности.
Указанное матричное изображение предпочтительно содержит отраженную линию излучения лазера, которая отображает указанную линию излучения лазера.
Предпочтительно, предусмотрена идентификация указанной отраженной линии излучения лазера на указанном матричном изображении.
Предпочтительно, предусмотрена обработка указанной отраженной линии излучения лазера посредством триангуляции для получения трехмерного изображения указанного линейного участка поверхности, содержащего информацию, относящуюся к альтиметрическому профилю указанного линейного участка поверхности.
Согласно его третьему аспекту изобретение относится к станции для контроля шин на линии по производству шин.
Предпочтительно, предусмотрена опора, выполненная с возможностью обеспечения опоры для шины, установленной на боковине, и вращения шины вокруг ее оси вращения.
Предпочтительно, предусмотрено устройство для контроля шин согласно первому аспекту изобретения в любом варианте его осуществления.
Устройство предпочтительно смонтировано на элементе для обеспечения его перемещения.
Заявитель полагает, что поскольку указанные первый и второй углы являются тупыми, можно обеспечить освещение и кадрирование труднодоступных участков внутренней поверхности, таких как внутренняя часть плечевой зоны, при избежании необходимости размещения отражающего элемента слишком близко к внутренней поверхности шины, такой как внутренняя поверхность короны, с риском столкновения между внутренней поверхностью и отражающим элементом и одновременном избежании необходимости слишком большого наклона устройства (и, следовательно, оптической оси на первом участке) относительно осевой средней плоскости с риском столкновения между частями устройства (такими как рама) и бортами или при невозможности выполнения такого наклона из-за контакта между устройством и бортами.
Это обеспечивает возможность задания оптимальных размеров и расположения элементов устройства, что делает последнее простым по конструкции, компактным и удобным в обращении и приспособленным для использования для получения изображений внутренней поверхности как плечевой зоны, так и боковины и борта, как лучше разъяснено в дальнейшем.
Настоящее изобретение в одном или более из его вышеприведенных аспектов может дополнительно иметь один или более из предпочтительных признаков, описанных в дальнейшем.
Третий угол, образованный между указанной оптической осью на указанном первом участке или втором участке оптической оси и указанной отражающей поверхностью предпочтительно меньше или равен 40°.
Третий угол, образованный между указанной оптической осью на указанном первом участке или втором участке оптической оси и указанной отражающей поверхностью предпочтительно больше или равен 20°.
Четвертый угол, образованный между указанной осью распространения на указанном первом участке или втором участке оси распространения и указанной отражающей поверхностью предпочтительно меньше или равен 40°.
Четвертый угол, образованный между указанной осью распространения на указанном первом участке или втором участке оси распространения и указанной отражающей поверхностью предпочтительно больше или равен 20°.
Третий угол предпочтительно больше или равен 30°.
Четвертый угол предпочтительно больше или равен 30°.
По мнению Заявителя, такой выбор значений углов помимо гарантирования того, что указанные первый и/или второй углы являются тупыми, создает возможность оптимизации размеров, конструкции и гибкости устройства.
Указанная матричная камера, указанный линейный лазерный источник и указанный отражающий элемент предпочтительно прикреплены к указанной опорной раме с образованием одного целого с ней в соответствующем фиксированном положении относительно нее. Указанная опорная рама предпочтительно представляет собой по существу жесткое тело. Таким образом, устройство является простым по конструкции и функционированию и надежным, поскольку оно не имеет компонентов, перемещающихся относительно рамы.
Указанная опорная рама предпочтительно содержит удлиненный вертикальный элемент с основной протяженностью вдоль первого направления, при этом вертикальный элемент имеет первый конец, на котором смонтирован указанный фланец, и второй конец, противоположный первому концу вдоль первого направления.
Указанная опорная рама предпочтительно содержит удлиненную поперечину с основной протяженностью вдоль второго направления, при этом поперечина имеет первый конец рядом со вторым концом вертикального элемента и второй конец, противоположный первому концу вдоль второго направления, при этом второй конец является свободным, при этом указанный отражающий элемент закреплен на указанном втором конце поперечины. Указанная поперечина предпочтительно представляет собой одно целое с указанным вертикальным элементом, например, она жестко прикреплена к указанному вертикальному элементу на его втором конце.
Первое направление и второе направление предпочтительно по существу ортогональны друг другу, более предпочтительно, если они являются ортогональными.
Указанный первый участок указанной оптической оси и/или указанный первый участок указанной оси распространения предпочтительно по существу параллельны указанному второму направлению.
Указанная плоскость распространения, по меньшей мере, на указанном первом участке указанной оси распространения предпочтительно по существу параллельна указанному первому направлению.
Удлиненная форма вертикального элемента и поперечины и их пространственное расположение друг относительно друга и относительно оптической оси и/или оси распространения и/или плоскости распространения делают устройство особенно гибким при получении изображений как внутренней поверхности плечевой зоны, так и внутренней поверхности боковины, а также внутренней поверхности борта после соответствующего перемещения (поступательного перемещения и/или наклона) устройства посредством системы обеспечения перемещения, предпочтительно такой, как роботизированная рука.
Указанный первый участок указанной оптической оси предпочтительно проходит от указанной матричной камеры до указанной отражающей поверхности.
Указанный первый участок указанной оси распространения предпочтительно проходит от указанного линейного лазерного источника до указанной отражающей поверхности.
Другими словами, отсутствуют какие-либо дополнительные элементы, которые вызывают отклонение оптического пути соответственно между указанным отражающим элементом и матричной камерой и лазером. Таким образом, устройство является конструктивно простым и надежным.
Указанный линейный лазерный источник и/или указанная матричная камера предпочтительно смонтированы на указанной опорной раме на втором конце указанного вертикального элемента. Это предотвращает применение дополнительных отражающих элементов, что обеспечивает вышеупомянутые преимущества.
Указанный линейный лазерный источник и указанная матричная камера предпочтительно расположены рядом друг с другом. Это способствует общей компактности устройства.
Указанный первый участок указанной оптической оси и указанный первый участок указанной оси распространения предпочтительно находятся в общей плоскости. Указанная общая плоскость предпочтительно по существу ортогональна к указанной плоскости распространения. Таким образом, оптимизируются эксплуатационные характеристики системы с точки зрения оптики помимо выполнения конструкции устройства особенно рациональной.
Пятый угол, образованный между указанным вторым участком указанной оптической оси и указанным вторым участком указанной оси распространения, предпочтительно больше или равен 5°.
Более предпочтительно, если указанный пятый угол больше или равен 10°. Это создает достаточное динамическое смещение отраженной линии излучения лазера для обнаружения изменений по высоте с достаточной чувствительностью.
Пятый угол предпочтительно меньше или равен 40°.
Более предпочтительно, если указанный пятый угол меньше или равен 35°. Таким образом, динамическое смещение отраженной линии излучения лазера не является чрезмерно широким для избежания необходимости в обработке слишком больших матричных изображений.
Указанный пятый угол предпочтительно меньше или равен 25°, более предпочтительно - меньше или равен 20°. Таким образом, получение 3D-изображений больших зон поверхности происходит за относительно меньшее время при сохранении компактности устройства и малых габаритных размеров в целом (и, таким образом, при сохранении возможности его легкого перемещения в пространстве даже в ограниченных зонах). Действительно, матричные изображения, полученные и обработанные матричной камерой, являются ограниченными (в отношении пикселей) по их размеру в направлении, ортогональном к отраженной линии излучения лазера, при заданном максимальном отклонении высоты, подлежащем обнаружению, и, следовательно, их можно быстрее обработать. Только в качестве числового примера в случае пятого угла, равного 15°, указанное решение обеспечивает возможность обработки матричных изображений с размером всего 2048×60 пикселей для обнаружения максимального отклонения высоты поверхности, составляющего приблизительно 25 мм, с разрешением 1 пиксель на 0,1 мм.
За указанным отражающим элементом по отношению к направлению распространения указанного линейного лазерного пучка предпочтительно отсутствуют какие-либо дополнительные отражающие элементы вдоль указанной оптической оси и/или вдоль указанной оси (9) распространения помимо указанного отражающего элемента. Таким образом, устройство является компактным и надежным.
В одном варианте осуществления отражающий элемент содержит призму.
Указанный отражающий элемент предпочтительно содержит базовый элемент, предпочтительно пластинчатый, и оптический элемент, прикрепленный к базовому элементу и имеющий указанную отражающую поверхность.
Указанный базовый элемент предпочтительно прикреплен к указанному второму концу указанной поперечины с образованием одного целого с ним.
Отражающая поверхность предпочтительно представляет собой физическую поверхность.
Отражающая поверхность предпочтительно только одна.
Отражающая поверхность предпочтительно является плоской.
Таким образом, устройство является простым по конструкции и/или при наладке, например, для выравнивания оптических компонентов.
Указанная отражающая поверхность (12) предпочтительно представляет собой наружную поверхность оптического элемента (41), обращенную к матричной камере (5) и линейному лазерному источнику (7).
Несмотря на то, что настоящее решение, в котором отражающая поверхность находится на проксимальной поверхности оптически активного элемента, создает более высокую уязвимость вследствие того, что отражающая поверхность может быть подвергнута повреждению из-за случайного контакта, оно, с другой стороны, предпочтительно устраняет все нежелательные отклонения оптического пути камеры и лазера в пределах прозрачного материала зеркала. Кроме того, настоящее изобретение, как упомянуто выше, позволяет удерживать отражающий элемент на большем расстоянии от внутренних поверхностей, что способствует уменьшению риска возникновения вышеупомянутого случайного контакта.
Указанный оптический элемент и/или указанная отражающая поверхность и/или указанный базовый элемент предпочтительно сужается от проксимального конца до дистального конца по отношению к матричной камере и/или к линейному лазерному источнику. Таким образом, сужение, возможность которого обеспечивается за счет наклона, существующего между оптической осью и осью распространения, предпочтительно обеспечивает уменьшение площади, занимаемой отражающим элементом, на его конце, который при использовании расположен ближе к внутренней поверхности. В частности, при использовании сужение согласуется с вогнутостью внутренней поверхности шины в направлении вдоль окружности. Это, в свою очередь, создает возможность приближения отражающего элемента к внутренней поверхности при уменьшении возможности столкновения с внутренней поверхностью. Для сравнения, прямоугольная форма отражающего элемента на виде в плане создала бы риск столкновения между его дистальными углами и внутренней поверхностью шины, который был бы тем выше, чем больше кривизна внутренней поверхности в средней плоскости (то есть чем меньше радиус кривизны в средней плоскости).
Матричная камера предпочтительно содержит датчик, определяющий плоскость изображения, объектив, имеющий указанную оптическую ось, фокальную плоскость и глубину резкости.
Указанная плоскость изображения предпочтительно образует с базовой плоскостью, ортогональной к оптической оси и проходящей через указанный объектив, острый угол, имеющий вершину на стороне, где размещен указанный линейный лазерный источник, (то есть плоскость изображения не ортогональна к оптической оси, как это обычно имеет место) так, что указанная фокальная плоскость образует с указанной плоскостью распространения острый угол, составляющий менее 45°, более предпочтительно меньший или равный 30°, еще более предпочтительно меньший или равный 10°. Таким образом, фокальная плоскость предпочтительно имеет наклон по направлению к плоскости распространения линейного лазерного пучка, и зона, соответствующая глубине резкости, проходит в окрестности плоскости распространения, которая представляет собой плоскость объекта (то есть плоскость точек, изображение которых должно быть получено, или, другими словами, плоскость, на которой находится линия излучения лазера на поверхности шины), посредством чего обеспечивается возможность лучшего фокусирования линии излучения лазера при такой же апертуре. Следует отметить, что уменьшение апертуры приводит к увеличению глубины резкости, но это привело бы к увеличению мощности облучения лазером, что вызывает недостатки, связанные со сложностью/затратами и/или безопасностью лазера.
Указанный острый угол между плоскостью изображения и базовой плоскостью предпочтительно меньше или равен 20°.
Указанный острый угол между плоскостью изображения и базовой плоскостью предпочтительно меньше или равен 15°.
Указанный острый угол между плоскостью изображения и базовой плоскостью предпочтительно больше или равен 5°. Таким образом, устройство предпочтительно остается очень компактным, поскольку корпус матричной камеры (который проходит вдоль нормали к плоскости изображения) почти выровнен относительно лазерного источника и его плоскости распространения, что приводит к меньшим боковым размерам.
Указанная матричная камера предпочтительно выполнена с возможностью получения матричного изображения участка указанной поверхности и содержит в соответствующем машинном корпусе блок обработки данных, выполненный с возможностью идентификации отраженной линии излучения лазера, отображающей линию излучения лазера, созданную посредством освещения линейной части указанного участка поверхности указанным линейным лазерным пучком, на указанном матричном изображении.
Блок обработки данных предпочтительно выполнен с возможностью обработки указанной отраженной линии излучения лазера посредством триангуляции для получения трехмерного изображения, содержащего информацию, относящуюся к альтиметрическому профилю указанной линейной части указанного участка поверхности.
Матричная камера предпочтительно содержит прямоугольный датчик, имеющий больший размер в направлении, по существу параллельном указанной плоскости распространения, при этом указанный больший размер меньше размера в направлении, ортогональном к данной плоскости, по меньшей мере, на один порядок величины. Таким образом, датчик оптимизирован по конструкции для регистрации матричных изображений с размерами, адаптированными к участку поверхности, для которого необходимо получить матричное изображение для лазерной триангуляции.
Предпочтительно предусмотрен выбор подчасти полученного матричного изображения вдоль направления, по существу ортогонального к отраженной линии излучения лазера на самом матричном изображении, при этом указанные операции идентификации отраженной линии излучения лазера и обработки отраженной линии излучения лазера посредством триангуляции проводятся на указанной подчасти изображения.
Блок обработки данных предпочтительно выполнен с возможностью выбора подчасти полученного матричного изображения вдоль направления, по существу ортогонального к отраженной линии излучения лазера на самом матричном изображении, при этом указанные операции идентификации отраженной линии излучения лазера и обработки отраженной линии излучения лазера посредством триангуляции проводятся на указанной подчасти изображения. Таким образом, могут быть обработаны изображения меньшего размера при отсутствии необходимости в датчике специализированного размера.
После указанной операции выбора подчасти полученного изображения число пикселей вдоль указанного направления, по существу ортогонального к отраженной линии излучения лазера, предпочтительно меньше или равно 200 пикселям.
Указанное число пикселей предпочтительно меньше или равно 100 пикселям. Таким образом, предпочтительно обеспечивается высокая скорость получения 3D-изображений.
Указанный участок поверхности предпочтительно расположен в пределах указанной глубины резкости.
Указанный участок поверхности предпочтительно находится в плоскости расположения, по существу ортогональной к указанной плоскости распространения (и оптическая ось имеет наклон относительно нормали к плоскости расположения). В этой ситуации глубина резкости для фокусировки максимального заданного отклонения высоты участка поверхности предпочтительно меньше, чем в конфигурации, в которой участок поверхности по существу перпендикулярен к оптической оси.
Предпочтительно, предусмотрено перемещение первой зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков указанной первой зоны внутренней поверхности была последовательно размещена в пределах указанной глубины резкости указанной матричной камеры, по меньшей мере, в указанной плоскости распространения, и при этом указанная система получения изображений приводится в действие последовательно во время указанного перемещения для последовательного повторения указанных операций освещения указанным линейным лазерным пучком, получения указанного соответствующего матричного изображения, идентификации указанной соответствующей отраженной линии излучения лазера, обработки указанной соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений указанной последовательности различных линейных участков указанной первой зоны внутренней поверхности, и при этом полное трехмерное изображение первой зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности.
Предпочтительно, предусмотрено перемещение второй зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков указанной второй зоны внутренней поверхности была последовательно размещена в пределах указанной глубины резкости указанной матричной камеры, по меньшей мере, в указанной плоскости распространения, и при этом указанная система получения изображений приводится в действие последовательно во время указанного перемещения для последовательного повторения указанных операций освещения указанным линейным лазерным пучком, получения указанного соответствующего матричного изображения, идентификации указанной соответствующей отраженной линии излучения лазера, обработки указанной соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений указанной последовательности различных линейных участков указанной второй зоны внутренней поверхности, и при этом полное трехмерное изображение второй зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности.
Предпочтительно, предусмотрено перемещение третьей зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков указанной третьей зоны внутренней поверхности была последовательно размещена в пределах указанной глубины резкости указанной матричной камеры, по меньшей мере, в указанной плоскости распространения, и при этом указанная система получения изображений приводится в действие последовательно во время указанного перемещения для последовательного повторения указанных операций освещения указанным линейным лазерным пучком, получения указанного соответствующего матричного изображения, идентификации указанной соответствующей отраженной линии излучения лазера, обработки указанной соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений указанной последовательности различных линейных участков указанной третьей зоны внутренней поверхности, и при этом полное трехмерное изображение третьей зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности.
Первая зона внутренней поверхности предпочтительно представляет собой зону внутренней поверхности плечевой зоны шины.
Вторая зона внутренней поверхности предпочтительно представляет собой зону внутренней поверхности боковины шины.
Третья зона внутренней поверхности предпочтительно представляет собой зону внутренней поверхности борта шины.
Указанная первая и/или вторая и/или третья зона внутренней поверхности предпочтительно представляет собой окружную зону внутренней поверхности.
Шину, подлежащую контролю, предпочтительно размещают так, чтобы она была расположена горизонтально на ее боковой стороне.
Операцию вставки, по меньшей мере, указанного отражающего элемента во внутреннее пространство указанной шины предпочтительно выполняют сверху.
Указанные первая и/или вторая и/или третья зоны внутренней поверхности предпочтительно принадлежат верхней половинной части шины относительно средней плоскости.
Более предпочтительно, если указанная окружная зона внутренней поверхности имеет ширину вдоль оси указанной шины, составляющую от приблизительно 5 мм до приблизительно 20 мм.
Предпочтительно, предусмотрен поворот указанной шины вокруг оси вращения для выполнения операции перемещения указанной первой и/или второй и/или третьей зоны внутренней поверхности шины относительно устройства.
Элемент для обеспечения перемещения устройства предпочтительно представляет собой роботизированную руку.
Элемент для обеспечения перемещения устройства предпочтительно представляет собой антропоморфную роботизированную руку.
Элемент для обеспечения перемещения устройства предпочтительно представляет собой антропоморфную роботизированную руку с, по меньшей мере, пятью степенями подвижности.
Дополнительные признаки и преимущества станут более очевидными из подробного описания некоторых иллюстративных, но неограничивающих вариантов осуществления устройства, способа и станции для контроля шин на линии по производству шин согласно настоящему изобретению. Такое описание будет приведено в дальнейшем со ссылкой на прилагаемые чертежи, представленные только в целях иллюстрации и, следовательно, не для ограничения, на которых:
фиг.1 - частичный и схематический вид в перспективе устройства для контроля шин согласно настоящему изобретению;
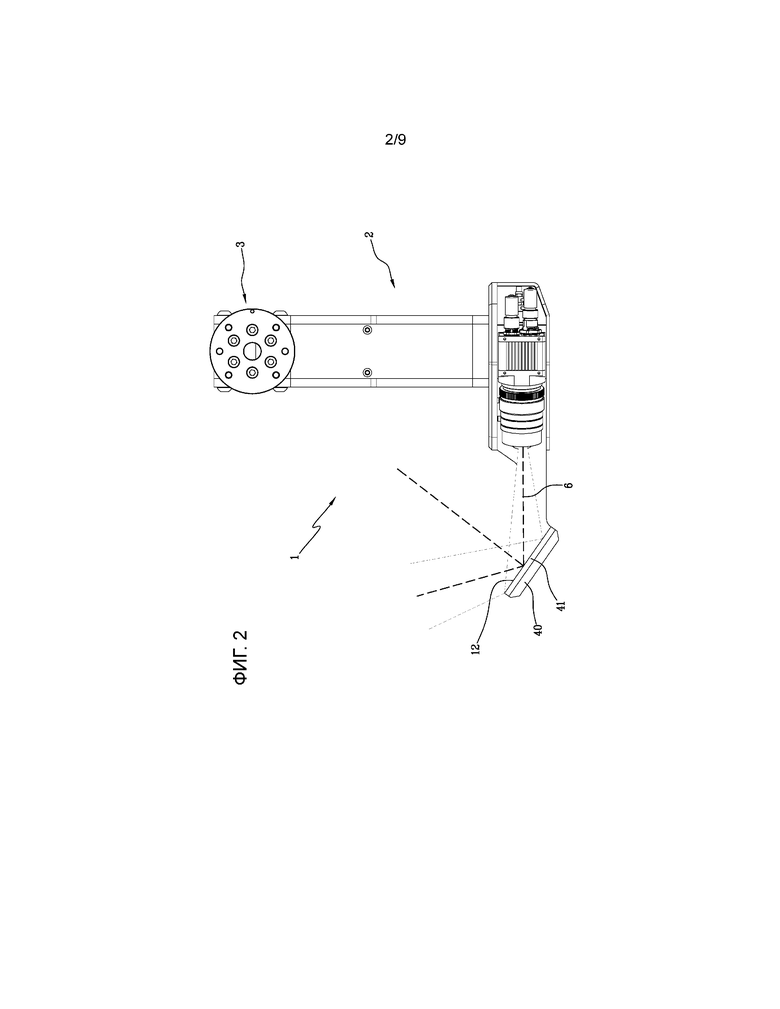
фиг.2 - вид сбоку устройства с фиг.1;
фиг.3 - изометрический вид сверху устройства с фиг.1 с некоторыми удаленными компонентами;
фиг.4 - схематический вид оптической конфигурации системы получения изображений, предусмотренной в устройстве с фиг.1, в которой для ясности иллюстрации отражающий элемент был удален;
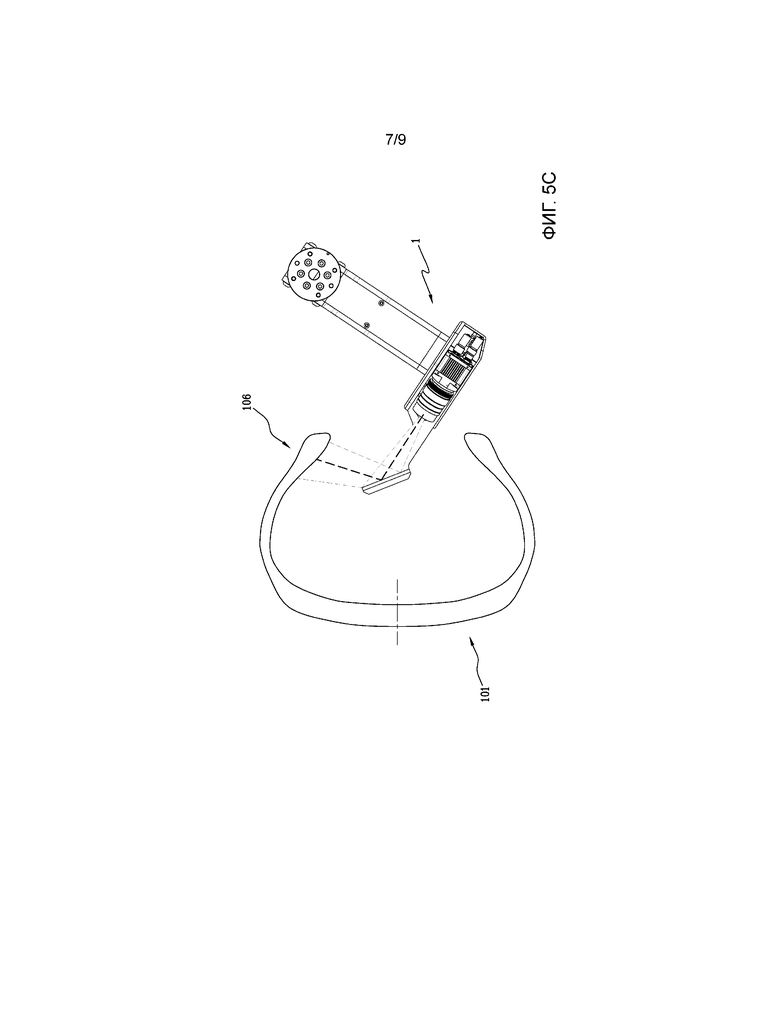
фиг.5а-5с – схематические виды не в масштабе соответствующих трех возможных положений устройства с фиг.1 во время использования;
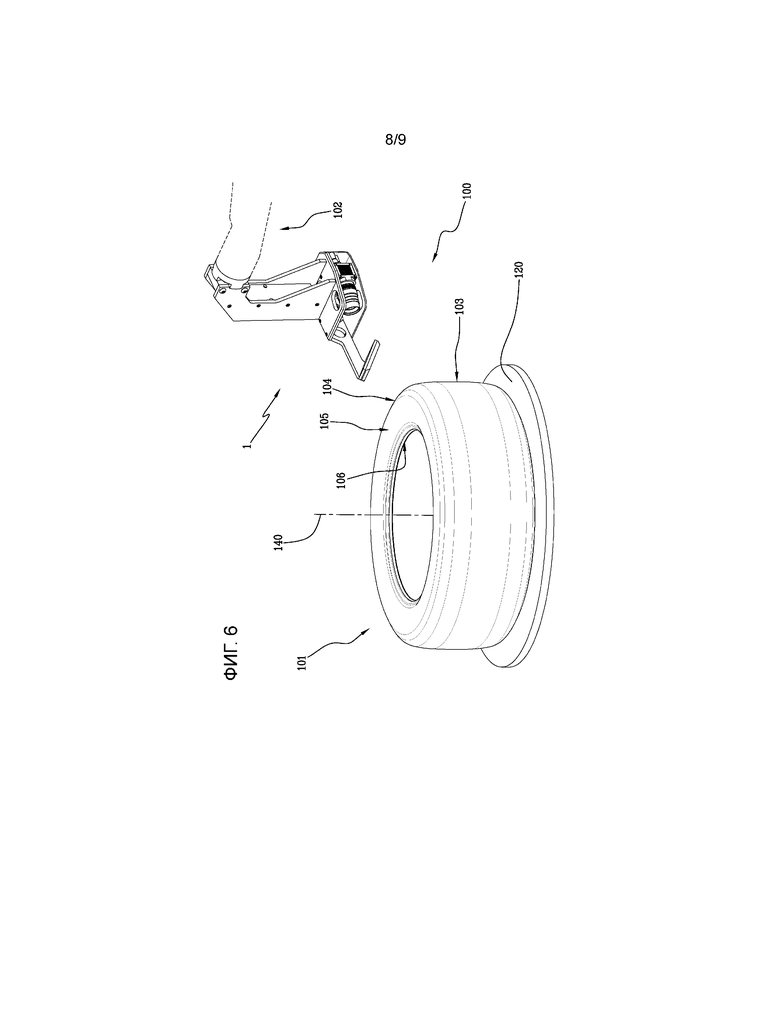
фиг.6 - станция для контроля шин согласно изобретению; и
фиг.7 – схематический пример системы получения изображений.
На фиг.6 ссылочной позицией 100 обозначена станция для контроля шин на линии по производству шин.
Станция предпочтительно содержит опору 120 (например, пятое колесо), выполненную с возможностью обеспечения опоры для шины 101, расположенной горизонтально на боковой стороне, и с возможностью поворота шины вокруг ее оси 140 вращения (предпочтительно расположенной вертикально).
Ссылочная позиция 106 обозначает верхний борт шины, ссылочная позиция 105 обозначает верхнюю боковину, ссылочная позиция 104 обозначает верхнюю плечевую зону, и ссылочная позиция 103 обозначает корону.
Станция 100 содержит устройство 1 для контроля шин.
Станция предпочтительно содержит элемент 102 для обеспечения перемещения (показанный только схематически), на котором устройство 1 смонтировано для обеспечения его перемещения в пространстве. Элемент для обеспечения перемещения устройства предпочтительно представляет собой роботизированную руку. Указанный элемент для обеспечения перемещения предпочтительно представляет собой антропоморфную роботизированную руку. Указанный элемент для обеспечения перемещения предпочтительно представляет собой антропоморфную роботизированную руку с, по меньшей мере, пятью степенями подвижности. На фигурах ссылочная позиция 10 обозначает направление оси для последней степени подвижности роботизированной руки, которая в качестве примера представляет собой ось цилиндрической симметрии фланца 3. Следует отметить, что при использовании устройство 1 предпочтительно вставляется внутрь шины сверху, а не снизу.
Устройство 1 содержит опорную раму 2, предназначенную для закрепления на элементе, предназначенном для обеспечения перемещения устройства, посредством указанного фланца 3, прикрепленного к опорной раме с образованием одного целого с ней.
Устройство 1 содержит систему 4 получения трехмерных изображений поверхности шины, содержащую матричную камеру 5, которая имеет оптическую ось 6, и линейный лазерный источник 7, выполненный с возможностью излучения линейного лазерного пучка, имеющего плоскость 8 распространения и ось 9 распространения.
Система получения изображений предпочтительно содержит отражающий элемент 11, смонтированный на указанный опорной раме и имеющий отражающую поверхность 12, которая пересекается как с указанной осью 9 распространения, так и с указанной оптической осью 6 так, чтобы соответственно задать первый участок 16 и второй участок 32 указанной оси распространения и первый участок 14 и второй участок 31 указанной оптической оси. Первый участок 16 и второй участок 32 оси распространения представляют собой прямолинейные участки, падающие на отражающую поверхность в соответствующей точке падения, и представляют собой зеркальное отображение друг друга по отношению к линии, перпендикулярной к отражающей поверхности в соответствующей точке падения.
Первый участок 14 и второй участок 31 оптической оси представляют собой прямолинейные участки, падающие на отражающую поверхность в соответствующей точке падения, и представляют собой зеркальное отображение друг друга относительно линии, перпендикулярной к отражающей поверхности в указанной соответствующей точке падения.
Первые участки 14, 16 обычно расположены соответственно со стороны матричной камеры 5 и линейного лазерного источника 7 по отношению к соответствующей точке падения.
Первый угол 50, образованный между первым и вторым участками оптической оси 6, предпочтительно является тупым.
Второй угол 51, образованный между первым и вторым участками оси 9 распространения, предпочтительно является тупым.
В качестве примера третий угол 13, образованный между указанной оптической осью на первом участке 14 и/или на втором участке 31 и указанной отражающей поверхностью, равен приблизительно 35°.
В качестве примера четвертый угол 15, образованный между осью 9 распространения на первом участке 16 и/или на втором участке 32 и отражающей поверхностью, равен приблизительно 35°.
Матричная камера 5, линейный лазерный источник 7 и отражающий элемент предпочтительно прикреплены к раме с образованием одного целого с ней в соответствующем фиксированном положении относительно рамы, то есть без возможности перемещения относительно рамы при использовании.
Опорная рама 2 предпочтительно содержит удлиненный вертикальный элемент 20 с основной протяженностью вдоль первого направления 21, при этом вертикальный элемент имеет первый конец 22, на котором смонтирован фланец 3, и второй конец 23, противоположный первому концу вдоль первого направления.
Рама предпочтительно содержит удлиненную поперечину 24 с основной протяженностью вдоль второго направления 25, при этом поперечина имеет первый конец 26, закрепленный на втором конце 23 вертикального элемента с образованием одного целого с ним, и второй конец 27, противоположный первому концу вдоль второго направления, при этом второй конец является свободным, при этом отражающий элемент 11 закреплен на втором свободном конце 27 поперечины с образованием одного целого с ним.
В качестве примера первое направление и второе направление ортогональны друг другу, и при использовании они оба ортогональны к оси 10, соответствующей «концевой» степени подвижности роботизированной руки.
В показанном примере первый прямолинейный участок 16 оси 9 распространения параллелен второму направлению 25. Однако настоящее изобретение также предусматривает непоказанные случаи, в которых первый прямолинейный участок оптической оси 6 параллелен второму направлению 25, или случай, в котором как первый прямолинейный участок оси 9 распространения, так и первый прямолинейный участок оптической оси 6 не являются точно параллельными второму направлению 25, а образуют соответствующий малый угол с ним, который, например, меньше или равен 15°.
В качестве примера плоскость 8 распространения параллельна первому направлению 21.
Линейный лазерный источник 7 и матричная камера 5 предпочтительно смонтированы на опорной раме на втором конце 23 вертикального элемента.
Однако в непоказанных альтернативных вариантах осуществления настоящего изобретения лазерный источник и/или матричная камера 5 могут быть смонтированы на вертикальном элементе 20 в месте, удаленном от второго конца 23 вертикального элемента. В этом случае оптическая ось 6 на участке, проходящем от матричной камеры 5, и/или ось 9 распространения на участке, проходящем от линейного лазерного источника 7, предпочтительно являются соответственно параллельными или по существу параллельными первому направлению 21, и дополнительно предусмотрен соответствующий дополнительный отражающий элемент, выполненный с возможностью отклонения соответствующих оптических путей по направлению к вышеуказанному отражающему элементу 11.
В предпочтительной конфигурации, показанной на фигуре, отсутствуют какие-либо дополнительные (отражающие или преломляющие) элементы, способные вызвать отклонение оптического пути оптической оси 6 или оси 9 распространения, помимо указанного отражающего элемента 11, при этом они отсутствуют между указанным отражающим элементом 11 и соответственно матричной камерой 5 и линейным лазерным источником 7 или отсутствуют за отражающим элементом 11 в направлении распространения линейного лазерного пучка. Следовательно, первый прямолинейный участок 14 оптической оси 6 охватывает весь путь, который проходит от матричной камеры 5 до отражающего элемента 11, и первый прямолинейный участок 16 оси 9 распространения охватывает весь путь, который проходит от линейного лазерного источника 7 до отражающего элемента 11.
Линейный лазерный источник 7 и матричная камера 5 предпочтительно расположены рядом друг с другом, и первый участок 14 оптической оси 6 и первый участок 16 оси 9 распространения находятся в общей плоскости, в качестве примера ортогональной к плоскости 8 распространения.
В качестве примера пятый угол 30, образованный между вторым участком 31 оптической оси 6 и вторым участком 32 оси 9 распространения, расположенными за отражающим элементом 11 относительно направления распространения линейного лазерного пучка, равен 15°.
В качестве примера вторые участки 31, 32 соответственно оптической оси 6 и оси 9 распространения сходятся в точке Р.
В качестве примера отражающий элемент 11 содержит базовый элемент 40, предпочтительно пластинчатый и прикрепленный ко второму концу 27 поперечины 24 с образованием одного целого с ним, и оптический элемент 41, прикрепленный к базовому элементу и имеющий указанную физическую, только одну, плоскую отражающую поверхность 12. В альтернативном варианте (непоказанном) отражающая поверхность может содержать две различные подчасти, а именно одну, предназначенную для лазерного пучка, и одну - для оптического поля матричной камеры 5.
Отражающая поверхность 12 предпочтительно представляет собой наружную поверхность оптического элемента 41, обращенную к матричной камере 5 и линейному лазерному источнику 7. Заявитель отмечает, что в зеркалах отражающая поверхность обычно представляет собой заднюю поверхность, которая расположена за прозрачным материалом зеркала для защиты ее от какого-либо случайного контакта. Однако Заявитель заметил, что для настоящей заявки наличие прозрачного материала не является предпочтительным, поскольку он может вызвать создание изображений, которые должны быть получены, с двойной отраженной линией излучения лазера, то есть будет иметь место так называемое явление «двоения изображения»: действительно, второе отражение может быть создано вследствие указанного прозрачного материала (такого как защитное стекло) помимо отражения, создаваемого фактической отражающей поверхностью, следствием чего являются затруднения при последующей обработке.
Оптический элемент 41, отражающая поверхность 12 и базовый элемент 40 предпочтительно сужаются от проксимального конца до дистального конца по отношению к матричной камере 5 и к линейному лазерному источнику 7.
Фиг.4 схематически показывает вид сверху иллюстративной оптической схемы системы получения изображений по настоящему изобретению, но без отражающего элемента 11 для ясности. Введение отражающего элемента 11 согласно настоящему изобретению вызывает отклонение оптических путей по отношению к тем, которые показаны на фиг.4, как будет ясно для специалиста в данной области техники на основе настоящего описания и фиг.1-3, однако без отхода от принципа, проиллюстрировано на фиг.4.
Матричная камера 5, как правило, имеет машинный корпус 5а, датчик, определяющий плоскость 29 изображения, объектив 28, имеющий указанную оптическую ось 6, фокальную плоскость 17 и глубину резкости (на фиг.4 в качестве примера показаны конечные плоскости 18, 19 для глубины резкости).
Плоскость расположения на фиг.4 ортогональна к плоскости 8 распространения.
Фокальная плоскость 17 также предпочтительно проходит через точку Р.
Предполагается, что внутренняя поверхность шины во время получения изображений по существу лежит в плоскости 35 расположения, по существу ортогональной к оси 9 распространения. «Плоскость расположения» участка поверхности представляет собой любую плоскость, проходящую на заданной высоте участка поверхности шины, предпочтительно плоскость, проходящую на промежуточной высоте по отношению к максимальному отклонению высоты поверхности.
Как схематически показано на фиг.4, плоскость 29 изображения в датчике матричной камеры 5 предпочтительно образует с базовой плоскостью 33 (показанной только схематически), ортогональной к оптической оси и проходящей через объектив, угол 34, имеющий вершину на стороне, где размещен линейный лазерный источник 7, и в качестве примера равный 10°.
Таким образом, фокальная плоскость 17 образует очень малый угол 30 с плоскостью 8 распространения, и глубина резкости в зоне, представляющей интерес, в окрестности плоскости 35 расположения поверхности (где имеет место отклонение высоты поверхности) соответствует полю резкости в окрестности плоскости 8 распространения, что создает возможность легкой фокусировки линейного лазерного пучка, который освещает поверхность вдоль заданного отклонения высоты даже при открытой апертуре.
Использование устройства 1 может обеспечить реализацию способа контроля шин по настоящему изобретению.
Шину 101, подлежащую контролю, размещают так, чтобы она была расположена горизонтально на ее боковой стороне, на опоре 120, которую приводят во вращение для поворота шины вокруг ее оси 140 вращения.
Устройство 1 для контроля шин приближают сверху для вставки, по меньшей мере, отражающего элемента 11 во внутреннее пространство шины (фиг.5а-с).
Благодаря повороту последовательность различных линейных участков первой зоны внутренней поверхности размещают последовательно в пределах глубины резкости матричной камеры 5, по меньшей мере, в плоскости 8 распространения.
Система получения изображений приводится в действие последовательно во время поворота для последовательного повторения этапов: освещения линейного участка внутренней поверхности линейным лазерным пучком, получения соответствующего матричного изображения соответствующего участка внутренней поверхности, содержащего соответствующий линейный участок внутренней поверхности, при этом матричное изображение содержит линию излучения лазера, отраженную соответствующим линейным участком поверхности, видимую под углом расположения матричной камеры 5, обработки матричного изображения для идентификации соответствующей отраженной линии излучения лазера, обработки соответствующей отраженной линии излучения лазера посредством триангуляции для получения соответствующего трехмерного изображения линейного участка поверхности, содержащего информацию, относящуюся к альтиметрическому профилю линейного участка поверхности.
Таким образом, получают соответствующую последовательность трехмерных изображений вышеуказанной последовательности различных линейных участков первой зоны внутренней поверхности, и полное трехмерное изображение первой зоны внутренней поверхности получают впоследствии путем комбинирования последовательности полученных трехмерных изображений.
Для увеличения скорости получения трехмерных изображений предпочтительно предусмотрена обрезка полученного матричного изображения вдоль направления, по существу ортогонального к отраженной линии излучения лазера на самом матричном изображении, например, таким образом, чтобы число пикселей вдоль направления, по существу ортогонального к отраженной линии излучения лазера, было меньше или равно 200 пикселям.
Как схематически показано на фиг.5а, первая зона предпочтительно представляет собой окружную периферийную зону внутренней поверхности верхней плечевой зоны 104. Следует отметить, что выражения «первая зона», «вторая зона» и «третья зона» необязательно подразумевают соответствующую последовательность во времени.
Предпочтительно предусмотрено повторение вышеуказанных операций посредством того же устройства 1 и получение полного трехмерного изображения (второй) окружной зоны внутренней поверхности верхней боковины 105 (фиг.5b).
Предпочтительно предусмотрено повторение вышеуказанных операций посредством того же устройства 1 и получение полного трехмерного изображения (третьей) окружной зоны внутренней поверхности верхнего борта 106 (фиг.5с).
Из вышеизложенного очевидно, что устройство по настоящему изобретению является особенно гибким/универсальным при получении изображений как внутренней поверхности плечевой зоны, так и внутренней поверхности боковины, а также внутренней поверхности борта после соответствующего перемещения (поступательного перемещения и/или наклона) устройства посредством роботизированной руки.
Фиг.7 схематически показывает систему 200 получения изображений, в которой соответствующий угол 107, образованный первым и вторым участками оси распространения излучения лазера и/или первым и вторым участками оптической оси камеры, является прямым.
В этом случае для получения 3D-изображения внутренней поверхности плечевой зоны 104 отражающий элемент размещают ближе к внутренней поверхности по отношению к тому, что происходит в случае устройства 1, описанного выше, следствием чего является повышенный риск столкновения.
В принципе также можно удерживать отражающую поверхность системы 200 получения изображений в радиальном направлении сзади посредством дополнительного наклона оси распространения излучения лазера и/или оптической оси камеры относительно средней плоскости шины, например, при дополнительном повороте системы 200 получения изображений, показанной на фиг.7, против часовой стрелки. Однако такой дополнительный поворот вызывает дополнительные конструктивные и/или функциональные ограничения, накладываемые на систему 200 получения изображений, например, для избежания столкновений с верхним бортом 106.
В завершение, система 200 получения изображений может потребовать - в зависимости от конкретной структуры и/или конкретного соединения с системой обеспечения перемещения - большего расстояния между отражающим элементом и камерой и/или лазером по отношению к системе 1 получения изображений, описанной выше.
Система 200 получения изображений в случае ее использования для получения изображений верхнего борта 106 также приводит к бóльшим ограничениям по отношению к указанному устройству 1 для избежания столкновения самой системы получения изображений с верхней и/или нижней частями борта, диаметрально противоположными частям борта, изображения которых получают.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН | 2016 |
|
RU2726725C2 |
| СПОСОБ КОНТРОЛЯ ФОРМИРОВАНИЯ БОРТОВ ШИН И СООТВЕТСТВУЮЩАЯ СТАНЦИЯ | 2017 |
|
RU2753716C2 |
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН | 2016 |
|
RU2721050C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН | 2016 |
|
RU2722779C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2015 |
|
RU2696343C2 |
| СТЕРЕОЛИТОГРАФИЧЕСКОЕ УСТРОЙСТВО С УЛУЧШЕННЫМ ОПТИЧЕСКИМ БЛОКОМ | 2015 |
|
RU2671740C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ КРОВЯНОГО ДАВЛЕНИЯ | 2016 |
|
RU2648029C2 |
| УСТАНОВКА И СПОСОБ КОНТРОЛЯ ШИН | 2016 |
|
RU2722984C2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО | 1999 |
|
RU2232454C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2015 |
|
RU2696346C2 |






Изобретение относится к устройству и способу контроля шин на линии по производству шин, в частности, посредством получения изображений внутренней поверхности шины и их дальнейшей обработки, например, для определения возможного наличия обнаруживаемых дефектов на поверхности шины. Техническим результатом является получение и анализ трехмерных изображений внутренней поверхности шины для контроля внутренней поверхности шины для обнаружения возможного наличия дефектов на или вблизи поверхности. Устройство (1) для контроля шин содержит опорную раму (2), фланец (3) и систему (4) получения трехмерных изображений поверхности шины, смонтированную на опорной раме и содержащую: матричную камеру (5), линейный лазерный источник (7) и отражающую поверхность (12), которая пересекает ось (9) распространения линейного лазерного пучка и оптическую ось (6) матричной камеры (5). 3 н. и 33 з.п. ф-лы, 7 ил.
1. Устройство (1) для контроля шин, содержащее:
опорную раму (2);
фланец (3), закрепленный на опорной раме для прикрепления опорной рамы к элементу (102) для обеспечения перемещения устройства; и
систему (4) получения изображений, предназначенную для получения трехмерных изображений поверхности шины, смонтированную на опорной раме и содержащую:
матричную камеру (5), имеющую оптическую ось (6),
линейный лазерный источник (7), выполненный с возможностью излучения линейного лазерного пучка, имеющего плоскость (8) распространения и ось (9) распространения, и
отражающий элемент (11), имеющий отражающую поверхность (12), которая пересекает как ось (9) распространения, так и оптическую ось (6) таким образом, чтобы соответственно задать первый участок (16) и второй участок (32) оси (9) распространения и первый участок (14) и второй участок (31) оптической оси (6),
при этом первый участок (16) и второй участок (32) оси (9) распространения представляют собой прямолинейные участки, падающие на отражающую поверхность (12) в соответствующей точке падения, причем первый участок (16) и второй участок (32) оси (9) распространения представляют собой зеркальное отображение друг друга по отношению к линии, перпендикулярной отражающей поверхности (12) в указанной соответствующей точке падения,
при этом первый участок (14) и второй участок (31) оптической оси (6) представляют собой прямолинейные участки, падающие на отражающую поверхность (12) в соответствующей точке падения, причем первый участок (14) и второй участок (31) оптической оси (6) представляют собой зеркальное отображение друг друга по отношению к линии, перпендикулярной отражающей поверхности (12) в указанной соответствующей точке падения,
при этом первые участки (14, 16) расположены соответственно со стороны матричной камеры (5) и линейного лазерного источника (7) относительно соответствующей точки падения,
причем первый угол (50), образованный между первым участком (14) и вторым участком (31) оптической оси (6), является тупым и
второй угол (51), образованный между первым участком (16) и вторым участком (32) оси (9) распространения, является тупым.
2. Устройство по п.1, в котором третий угол (13), образованный между оптической осью (6) на первом участке (14) или втором участке (31) оптической оси (6) и отражающей поверхностью (12), меньше или равен 40° и больше или равен 20°.
3. Устройство по п.1 или 2, в котором четвертый угол (15), образованный между осью (9) распространения на первом участке (16) или втором участке (32) оси (9) распространения и отражающей поверхностью (12), меньше или равен 40° и больше или равен 20°.
4. Устройство по пп.2 и 3, в котором третий угол (13) больше или равен 30° и четвертый угол (15) больше или равен 30°.
5. Устройство по любому из предшествующих пунктов, в котором матричная камера (5), линейный лазерный источник (7) и отражающий элемент (11) прикреплены к опорной раме (2) с образованием одного целого с ней в соответствующем фиксированном положении относительно нее.
6. Устройство по любому из предшествующих пунктов, в котором опорная рама (2) содержит вертикальный элемент (20) с удлиненной формой с основной протяженностью вдоль первого направления (21), причем вертикальный элемент имеет первый конец (22), на котором смонтирован фланец (3), и второй конец (23), противоположный первому концу (22) вдоль первого направления (21).
7. Устройство по п.6, в котором опорная рама (2) содержит поперечину (24) с удлиненной формой с основной протяженностью вдоль второго направления (25), при этом поперечина имеет первый конец (26) рядом со вторым концом (23) вертикального элемента (20) и второй конец (27), противоположный первому концу (26) вдоль второго направления (25), причем второй конец (27) является свободным, при этом отражающий элемент (11) закреплен на втором конце (27) поперечины.
8. Устройство по п.7, в котором первое направление (21) и второе направление (25) по существу ортогональны друг другу.
9. Устройство по п.7 или 8, в котором первый участок (14) оптической оси (6) по существу параллелен второму направлению (25) или первый участок (16) оси (9) распространения по существу параллелен второму направлению.
10. Устройство по п.7 или 8, в котором первый участок (14) оптической оси (6) по существу параллелен второму направлению (25) и первый участок (16) оси (9) распространения по существу параллелен второму направлению.
11. Устройство по любому из пп.6-10, в котором плоскость (8) распространения по меньшей мере на первом участке (16) оси (9) распространения по существу параллельна первому направлению (21).
12. Устройство по любому из предшествующих пунктов, в котором первый участок (14) оптической оси (6) проходит от матричной камеры (5) до отражающей поверхности (12).
13. Устройство по любому из предшествующих пунктов, в котором первый участок (16) оси (9) распространения проходит от линейного лазерного источника (7) до отражающей поверхности (12).
14. Устройство по любому из пп.6-13, в котором линейный лазерный источник (7) и матричная камера (5) смонтированы на опорной раме (2) на втором конце (23) вертикального элемента (20).
15. Устройство по любому из предшествующих пунктов, в котором линейный лазерный источник (7) и матричная камера (5) расположены рядом друг с другом.
16. Устройство по любому из предшествующих пунктов, в котором первый участок (14) оптической оси (6) и первый участок (16) оси (9) распространения находятся в общей плоскости, по существу ортогональной к плоскости (8) распространения.
17. Устройство по любому из предшествующих пунктов, в котором пятый угол (30), образованный между вторым участком (31) оптической оси (6) и вторым участком (32) оси (9) распространения, больше или равен 5° и меньше или равен 40°.
18. Устройство по п.17, в котором пятый угол (30) меньше или равен 20°.
19. Устройство по любому из предшествующих пунктов, в котором за отражающим элементом (11) по отношению к направлению распространения линейного пучка отсутствуют какие-либо дополнительные отражающие элементы вдоль оптической оси (6) или вдоль оси (9) распространения, помимо отражающего элемента (11).
20. Устройство по любому из пп.1-18, в котором за отражающим элементом (11) по отношению к направлению распространения линейного пучка отсутствуют какие-либо дополнительные отражающие элементы вдоль оптической оси (6) и вдоль оси (9) распространения, помимо отражающего элемента (11).
21. Устройство по любому из предшествующих пунктов, в котором отражающий элемент (11) содержит базовый элемент (40) и оптический элемент (41), прикрепленный к базовому элементу (40) и имеющий отражающую поверхность (12).
22. Устройство по пп.7 и 21, в котором базовый элемент (40) прикреплен ко второму концу (27) поперечины (24) с образованием одного целого с ним, причем отражающая поверхность (12) представляет собой одну физическую поверхность и является плоской.
23. Устройство по п.21, в котором отражающая поверхность (12) представляет собой наружную поверхность оптического элемента (41), обращенную к матричной камере (5) и линейному лазерному источнику (7).
24. Устройство по п.21, в котором оптический элемент (41) сужается от проксимального конца до дистального конца по отношению к матричной камере (5) или к линейному лазерному источнику (7).
25. Устройство по любому из предшествующих пунктов, в котором отражающая поверхность (12) сужается от проксимального конца до дистального конца по отношению к матричной камере (5) или к линейному лазерному источнику (7).
26. Устройство по п.21, в котором базовый элемент (40) сужается от проксимального конца до дистального конца по отношению к матричной камере (5) или к линейному лазерному источнику (7).
27. Устройство по любому из предшествующих пунктов, в котором матричная камера (5) содержит датчик, определяющий плоскость (29) изображения, объектив (28), имеющий оптическую ось (6), фокальную плоскость (17) и глубину резкости, при этом плоскость (29) изображения образует с базовой плоскостью (33), ортогональной к оптической оси и проходящей через объектив, острый угол (34), имеющий вершину на стороне, где размещен линейный лазерный источник (7), так, что фокальная плоскость (17) образует с плоскостью (8) распространения угол, который меньше или равен 45°, причем острый угол (34) между плоскостью (29) изображения и базовой плоскостью (33) меньше или равен 20° и больше или равен 5°.
28. Устройство по любому из предшествующих пунктов, в котором матричная камера (5) выполнена с возможностью получения матричного изображения участка поверхности и содержит в соответствующем машинном корпусе (5а) блок обработки данных, выполненный с возможностью:
идентификации отраженной линии излучения лазера, которая отображает линию излучения лазера, созданную при освещении линейной части участка поверхности линейным лазерным пучком, на матричном изображении;
обработки отраженной линии излучения лазера посредством триангуляции для получения трехмерного изображения, содержащего информацию, относящуюся к альтиметрическому профилю линейной части участка поверхности;
выбора подчасти полученного матричного изображения вдоль направления, по существу ортогонального к отраженной линии излучения лазера на самом матричном изображении, при этом операции идентификации линии излучения лазера и обработки отраженной линии излучения лазера посредством триангуляции проводятся на подчасти изображения,
причем после операции выбора подчасти полученного изображения число пикселей вдоль указанного направления, по существу ортогонального к отраженной линии излучения лазера, меньше или равно 200 пикселям.
29. Станция (100) контроля шин на линии по производству шин, содержащая опору (120), выполненную с возможностью обеспечения опоры для шины (101), установленной на боковине, и поворота шины вокруг ее оси (140) вращения, и устройство (1) для контроля шин по любому из предшествующих пунктов, причем устройство (1) смонтировано на элементе (102) для обеспечения его перемещения.
30. Способ контроля шин, включающий:
размещение шины (101), подлежащей контролю;
размещение устройства (1) для контроля шин по любому из пп.1-28;
вставку, по меньшей мере, отражающего элемента (11) в пространство внутри шины;
освещение линейного участка внутренней поверхности шины посредством линейного лазерного пучка так, чтобы образовать линию излучения лазера;
получение матричного изображения участка внутренней поверхности, содержащего линейный участок внутренней поверхности, при этом матричное изображение содержит отраженную линию излучения лазера, которая отображает линию излучения лазера;
идентификацию отраженной линии излучения лазера на матричном изображении;
обработку отраженной линии излучения лазера посредством триангуляции для получения трехмерного изображения линейного участка поверхности, содержащего информацию, относящуюся к альтиметрическому профилю линейного участка поверхности.
31. Способ по п.30, включающий выбор подчасти полученного матричного изображения вдоль направления, по существу ортогонального к отраженной линии излучения лазера на самом матричном изображении, причем указанные операции идентификации отраженной линии излучения лазера и обработки отраженной линии излучения лазера посредством триангуляции проводят на указанной подчасти изображения.
32. Способ по п.30 или 31, включающий:
перемещение первой зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков первой зоны внутренней поверхности была последовательно размещена в пределах глубины резкости матричной камеры (5), по меньшей мере, в плоскости (8) распространения, при этом система (4) получения изображений приводится в действие последовательно во время перемещения для последовательного повторения операций освещения линейным лазерным пучком, получения соответствующего матричного изображения, идентификации соответствующей отраженной линии излучения лазера, обработки соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений последовательности различных линейных участков первой зоны внутренней поверхности, причем полное трехмерное изображение первой зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности,
при этом первая зона внутренней поверхности представляет собой зону внутренней поверхности плечевой зоны (104) шины.
33. Способ по любому из пп.30-32, включающий:
перемещение второй зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков второй зоны внутренней поверхности была последовательно размещена в пределах глубины резкости матричной камеры (5), по меньшей мере, в плоскости распространения, причем система получения изображений приводится в действие последовательно во время перемещения для последовательного повторения операций освещения линейным лазерным пучком, получения соответствующего матричного изображения, идентификации соответствующей отраженной линии излучения лазера, обработки соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений последовательности различных линейных участков второй зоны внутренней поверхности, при этом полное трехмерное изображение второй зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности, причем вторая зона внутренней поверхности представляет собой зону внутренней поверхности боковины (105) шины.
34. Способ по любому из пп.30-33, включающий:
перемещение третьей зоны внутренней поверхности шины относительно устройства так, чтобы последовательность различных линейных участков третьей зоны внутренней поверхности была последовательно размещена в пределах глубины резкости матричной камеры (5), по меньшей мере, в плоскости распространения, при этом система получения изображений приводится в действие последовательно во время перемещения для последовательного повторения операций освещения линейным лазерным пучком, получения соответствующего матричного изображения, идентификации соответствующей отраженной линии излучения лазера, обработки соответствующей отраженной линии излучения лазера и получения соответствующего трехмерного изображения для получения соответствующей последовательности трехмерных изображений последовательности различных линейных участков третьей зоны внутренней поверхности, причем полное трехмерное изображение третьей зоны внутренней поверхности получают комбинированием последовательности трехмерных изображений, полученных для последовательности линейных участков внутренней поверхности, при этом третья зона внутренней поверхности представляет собой зону внутренней поверхности борта (106) шины.
35. Способ по любому из пп.30-34, в котором шину, подлежащую контролю, размещают так, чтобы она была расположена горизонтально на боковине, при этом операция вставки, по меньшей мере, отражающего элемента (11) во внутреннее пространство шины происходит сверху.
36. Способ по п.35, в котором по меньшей мере одна из первой зоны внутренней поверхности, второй зоны внутренней поверхности и третьей зоны внутренней поверхности принадлежит верхней половинной части шины относительно средней плоскости.
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ВЫСОТ И ДЛЯ НИВЕЛЛИРОВАНИЯ | 1926 |
|
SU6405A1 |
| CN 1259543 C, 14.06.2006 | |||
| FR 3011080 A1, 27.03.2015 | |||
| DE 4101921 B4, 08.04.2004 | |||
| JP 2011247639 A, 08.12.2011 | |||
| US 6539789 B1, 01.04.2003. | |||

