Настоящее изобретение относится к блоку оценки для компоновки датчиков для наблюдения за железной дорогой, к компоновке датчиков для наблюдения за железной дорогой и к способу оценки сигналов наблюдения за железной дорогой.
Для того, чтобы наблюдать за движением рельсовых транспортных средств по железнодорожным путям, рельсовые транспортные средства могут быть обнаружены в фиксированных позициях вдоль железнодорожного пути. Датчики фиксированной позиции могут, например, предоставлять информацию, если рельсовое транспортное средство проезжает их фиксированную позицию. Посредством применения двух или более датчиков позиции движущиеся рельсовые транспортные средства могут быть обнаружены в нескольких позициях. При этом может быть определено, находится ли рельсовое транспортное средство в некоторой области пути между двумя датчиками позиции. Посредством оценки выходных сигналов двух датчиков позиции некоторые области пути могут быть определены как свободные для рельсового транспортного средства или занятые рельсовым транспортным средством.
Посредством применения, по меньшей мере, двух датчиков позиций в непосредственной близости могут быть определены скорость и направление движения движущегося рельсового транспортного средства. Посредством подсчета числа осей рельсового транспортного средства, проезжающего над датчиком позиции, может быть определена длина рельсового транспортного средства. Кроме того, возможно определять, по какому пути рельсовое транспортное средство движется, посредством позиционирования датчиков позиции на каждом пути.
Однако, с помощью этих фиксированных датчиков позиции невозможно получать какую-либо информацию о движении рельсового транспортного средства между двумя датчиками позиции. Таким образом, возможно лишь получать информацию о рельсовом транспортном средстве, такую как скорость или направление движения, в фиксированных позициях датчиков позиции.
Целью является предоставление блока оценки для компоновки датчиков для наблюдения за железной дорогой, блок оценки приспособлен для предоставления текущей позиции рельсового транспортного средства на железнодорожном пути. Кроме того, целью является предоставление блока оценки для компоновки датчиков для наблюдения за железной дорогой, который предоставляет выходной сигнал, который зависит от двух различных выходных сигналов. Кроме того, целью является предоставление компоновки датчиков для наблюдения за железной дорогой, приспособленной для предоставления текущей позиции рельсового транспортного средства на железнодорожном пути. Также целью является предоставление способа оценки сигналов наблюдения за железной дорогой, приспособленного для предоставления текущей позиции рельсового транспортного средства на железнодорожном пути.
Эта цель достигается посредством независимых пунктов формулы изобретения. Дополнительные варианты осуществления являются субъектом зависимых пунктов формулы изобретения.
В одном варианте осуществления блока оценки для компоновки датчиков для наблюдения за железной дорогой, блок оценки содержит соединение с датчиком позиции, приспособленным для обнаружения рельсовых транспортных средств, проезжающих над позицией датчика позиции по железнодорожному пути, и предоставления выходного сигнала позиции. Датчик позиции может быть расположен в фиксированной позиции в или на железнодорожном пути. Выходной сигнал позиции может, например, содержать информацию о том, проезжает ли рельсовое транспортное средство над позицией датчика позиции, или находится ли рельсовое транспортное средство в позиции датчика позиции. Датчик позиции может, например, также предоставлять информацию о скорости рельсового транспортного средства и о направлении движения рельсового транспортного средства.
В одном варианте осуществления блок оценки для компоновки датчиков для наблюдения за железной дорогой содержит соединение с отслеживающим датчиком, который содержит волоконно-оптический датчик, который приспособлен для обнаружения позиции шума вдоль железнодорожного пути, и который предоставляет выходной сигнал отслеживания. Отслеживающий датчик может содержать волокно, которое размещается вдоль железнодорожного пути, что означает, что оно располагается в непосредственной близости к железнодорожному пути. В непосредственной близости означает, что отслеживающий датчик приспособлен для обнаружения шума, вызванного, например, проезжающим рельсовым транспортным средством. Отслеживающий датчик может содержать волоконно-оптический датчик, который соединяется с оптическим волокном. Световой импульс от источника света может быть отправлен в оптическое волокно, где он рассеивается в посторонних телах или других участках рассеивания. Это означает, что часть света отражается к источнику света. Рассеивание зависит от физических изменений в оптическом волокне, которые могут быть вызваны, например, шумом в непосредственной близости к оптическому волокну.
Отслеживающий датчик приспособлен для обнаружения позиции шума вдоль железнодорожного пути. Шум может быть шумом, распространяющимся по конструкции, звуковыми волнами или вибрациями от окружения вокруг оптического волокна. Выходной сигнал отслеживания может предоставлять информацию о позиции обнаруженного шума вдоль железнодорожного пути. Шум, обнаруженный посредством отслеживающего датчика, может быть, например, вызван рельсовым транспортным средством, движущимся по железнодорожному пути.
В одном варианте осуществления блок оценки предоставляет выходной сигнал, который зависит от выходного сигнала позиции и выходного сигнала отслеживания. Посредством объединения информации, предоставленной посредством выходного сигнала позиции и выходного сигнала отслеживания, блок оценки может предоставлять текущую позицию рельсового транспортного средства на железнодорожном пути.
Посредством объединения информации, предоставленной посредством выходного сигнала позиции и выходного сигнала отслеживания, например, текущая позиция каждого рельсового транспортного средства на железнодорожном пути может быть определена без необходимости в дополнительных компонентах на рельсовых транспортных средствах. Особенно на международных железнодорожных путях рельсовые транспортные средства могут быть обнаружены без дополнительных компонентов на рельсовых транспортных средствах. При этом усложнения, получающиеся в результате различных стандартов в различных странах, устраняются. Кроме того, позиция рельсового транспортного средства не может быть определена лишь в фиксированных позициях датчиков позиции, но текущая позиция рельсового транспортного средства может также быть определена между предварительно определенными позициями и конкретными участками железнодорожного пути.
В одном варианте осуществления блок оценки для компоновки датчиков для наблюдения за железной дорогой содержит соединение, по меньшей мере, с одним датчиком позиции и, по меньшей мере, с одним отслеживающим датчиком, и блок оценки предоставляет выходной сигнал, который зависит от выходного сигнала позиции и выходного сигнала отслеживания.
В одном варианте осуществления блок оценки приспособлен для предоставления текущей позиции рельсового транспортного средства на железнодорожном пути посредством объединения информации, предоставленной посредством выходного сигнала позиции и выходного сигнала отслеживания. Это означает, что позиция рельсового транспортного средства не может быть определена только в позиции датчика позиции, но также, если рельсовое транспортное средство находится между позициями двух или более датчиков позиции или в любой позиции на железнодорожном пути. Таким образом, текущая позиция рельсового транспортного средства может быть определена в реальном времени в пределах точности измерения. Объединение информации, предоставленной посредством выходного сигнала позиции и выходного сигнала отслеживания, означает, что информация, обнаруженная только посредством датчика позиции, объединяется с информацией, обнаруженной только посредством отслеживающего датчика. При этом, например, расписание рельсовых транспортных средств может быть проанализировано и отрегулировано. Кроме того, безопасность может быть улучшена, например, в области железнодорожных переездов.
В одном варианте осуществления блок оценки предоставляет информацию о том, по какому пути рельсовое транспортное средство движется, в случае более чем одного пути, размещенных параллельно, каждый путь имеет, по меньшей мере, один датчик позиции, предназначенный для него. В случае более чем одного пути, размещенных параллельно, отслеживающий датчик неспособен четко определять, по какому пути рельсовое транспортное средство движется. Следовательно, датчики позиции могут быть размещены на каждом пути, предоставляя информацию о том, по какому пути рельсовое транспортное средство движется. Посредством объединения информации датчика позиции и отслеживающего датчика также в случае более чем одного пути, размещенных параллельно, текущая позиция рельсового транспортного средства на железнодорожном пути может быть определена.
В одном варианте осуществления блок оценки предоставляет информацию о текущей позиции рельсового транспортного средства, по меньшей мере, между двумя предварительно определенными позициями. Предварительно определенные позиции на железнодорожном пути могут быть, например, датчиками позиции или станциями.
В одном варианте осуществления блок оценки предоставляет информацию о текущей позиции рельсового транспортного средства на конкретном участке железнодорожного пути. Конкретные участки железнодорожного пути могут быть, например, в пределах станций, между станциями, между датчиками позиции или в туннелях.
В одном варианте осуществления блок оценки предоставляет информацию о текущей скорости рельсового транспортного средства. Текущая скорость может быть определена, например, посредством двух датчиков позиции, размещенных в непосредственной близости, посредством определения различных времен, в которые рельсовое транспортное средство проезжает мимо двух датчиков позиции. Текущая скорость рельсового транспортного средства может также быть определена из первой производной сигнала отслеживания.
В одном варианте осуществления блок оценки предоставляет информацию о текущем ускорении рельсового транспортного средства. Текущее ускорение рельсового транспортного средства может, например, быть определено посредством второй производной сигнала отслеживания.
В одном варианте осуществления блок оценки предоставляет информацию о текущем направлении движения рельсового транспортного средства. Направление движения рельсового транспортного средства может, например, быть определено посредством двух датчиков позиции в непосредственной близости посредством сравнения различных времен, в которые рельсовое транспортное средство проезжает мимо двух датчиков позиции.
В одном варианте осуществления блок оценки предоставляет информацию о позиции ползуна колеса рельсового транспортного средства. Ползун колеса рельсового транспортного средства может быть обнаружен посредством оценки сигнала отслеживания, так как ползун колеса производит отличающуюся сигнатуру сигнала отслеживания, чем рельсовое транспортное средство без ползуна колеса.
В одном варианте осуществления блок оценки предоставляет информацию о позиции излома рельса на железнодорожном пути, по которому рельсовое транспортное средство движется. В одном варианте осуществления позиция излома рельса может также быть определена посредством оценки выходного сигнала отслеживания. Кроме того, позиция ослабленных соединений пути может быть определена.
В одном варианте осуществления блок оценки предоставляет информацию о позиции другого шума или вибраций вдоль железнодорожного пути, по которому рельсовое транспортное средство движется. Другой шум на железнодорожном пути или рядом может содержать движения транспортных средств, шаги людей, ручное или машинное копание, рабочие группы, движение животных или окружающие события, такие как камнепады или оползни. Другими примерами являются кража или вандализм.
В одном варианте осуществления блок оценки предоставляет информацию о том, по какому пути рельсовое транспортное средство движется, в случае более чем одного пути, размещенных параллельно. Для того, чтобы определять, по какому пути рельсовое транспортное средство движется, например, по меньшей мере, один датчик позиции может быть размещен для каждого пути.
В одном варианте осуществления блок оценки предоставляет информацию о числе осей рельсового транспортного средства. Датчик позиции может, например, быть приспособлен для обнаружения осей рельсового транспортного средства.
В одном варианте осуществления блок оценки предоставляет информацию о диаметре осей рельсового транспортного средства. Датчик позиции может, например, быть приспособлен для обнаружения диаметра осей рельсового транспортного средства.
В одном варианте осуществления блок оценки предоставляет информацию о длине рельсового транспортного средства. Длина рельсового транспортного средства может, например, быть определена посредством подсчета осей рельсового транспортного средства.
В одном варианте осуществления блок оценки предоставляет информацию о температуре в позиции датчика позиции. Например, температура может быть измерена посредством датчика позиции и связывается с температурой рельса.
С помощью информации, предоставленной посредством блока оценки, улучшенное наблюдение железнодорожного пути и движения рельсовых транспортных средств является возможным. Следовательно, может быть предоставлена возможность более безопасного и более эффективного железнодорожного движения.
В одном варианте осуществления блок оценки предоставляет дополнительный выходной сигнал, который зависит только от выходного сигнала позиции, по меньшей мере, одного датчика позиции, и при этом дополнительный выходной сигнал соответствует требованиям уровня полноты безопасности. Дополнительный выходной сигнал может, например, содержать информацию о направлении движения рельсового транспортного средства, и по какому пути рельсовое транспортное средство движется. Дополнительно, выходной сигнал может, например, также предоставлять информацию о том, проехало ли рельсовое транспортное средство позицию датчика позиции. При этом может быть определено, позиционируется ли рельсовое транспортное средство в некоторой области пути. Это означает, что может быть определено, занята ли некоторая область пути рельсовым транспортным средством, или свободна ли она. С помощью дополнительного выходного сигнала, соответствующего требованиям уровня полноты безопасности, компоновка датчиков может быть применена для безопасного наблюдения за железной дорогой.
В одном варианте осуществления компоновка датчиков для наблюдения за железной дорогой содержит блок оценки, по меньшей мере, один датчик позиции с выходом датчика позиции и, по меньшей мере, один отслеживающий датчик с выходом отслеживающего датчика. Блок оценки соединяется с выходом датчика позиции и выходом отслеживающего датчика. Блок оценки может объединять сигналы, предоставляемые посредством датчика позиции и отслеживающего датчика, чтобы предоставлять текущую позицию рельсового транспортного средства на железнодорожном пути.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой датчик позиции содержит один или более индуктивных датчиков. Индуктивный датчик может быть приспособлен для обнаружения изменения магнитного поля, индуцируемого металлом, движущимся в магнитном поле. Металл, движущийся в магнитном поле, может быть, например, колесом рельсового транспортного средства. Если датчик позиции содержит, по меньшей мере, два индуктивных датчика, например, скорость и направление движения рельсового транспортного средства могут быть определены. Кроме того, в случае отказа датчика, более безопасным является применение, по меньшей мере, двух индуктивных датчиков.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой датчик позиции содержит один или более емкостных датчиков, механических датчиков, оптических датчиков, тензометрических датчиков, пьезоэлектрических датчиков или радиолокационных датчиков.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой волоконно-оптический датчик обнаруживает свет, в частности, лазерный свет, который рассеивается в оптическом волокне, где обратнорассеянный сигнал указывает позицию шума вдоль оптического волокна, так что позиция рельсового транспортного средства на железнодорожном пути и другого шума на или вдоль железнодорожного пути может быть определена. Шум может быть, например, шумом, распространяющимся по конструкции, звуковыми волнами или вибрациями от окружения вокруг оптического кабеля.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой отслеживающий датчик содержит распределенный акустический датчик. Это означает, что отслеживающий датчик может содержать источник света, например, лазер, где световые импульсы отправляются в оптическое волокно. Небольшая часть света отражается обратно в источник света, так как свет рассеивается на участках рассеяния, таких как, например, посторонние тела в оптическом кабеле, которые могут быть естественными или искусственными. Изменения в обратнорассеянном сигнале связываются с физическими изменениями в оптическом волокне, которые могут быть вызваны шумом, шумом, распространяющимся по конструкции, вибрациями или звуковыми волнами вдоль оптического волокна. Оптическое волокно может быть размещено в непосредственной близости к железнодорожному пути, так что отслеживающий датчик приспособлен для обнаружения шума вдоль железнодорожного пути. Шум вдоль железнодорожного пути может быть вызван, например, движущимся рельсовым транспортным средством, людьми или строительной работой. Посредством оценки обратнорассеянного сигнала может быть определено местоположение шума вдоль оптического волокна. При этом, вибрации и шум на и около железнодорожного пути могут наблюдаться в реальном времени. Следовательно, движение рельсовых транспортных средств, людей или животных, также как окружающие события, могут наблюдаться.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой отслеживающий датчик содержит источник импульсного сигнала и/или оптическое волокно, где данные, обнаруженные посредством датчика позиции, передаются блоку оценки через оптическое волокно и отслеживающий датчик. Источник импульсного сигнала может быть, например, лазером. Датчик позиции может быть соединен с оптическим волокном таким способом, что данные, обнаруженные посредством датчика позиции, могут быть переданы посредством оптического волокна. Данные, обнаруженные посредством датчика позиции, могут, например, быть переданы оптическому волокну посредством электрически управляемого пьезоэлемента. Данные, обнаруженные посредством датчика позиции, могут быть закодированы, например, посредством частотной модуляции, перед передачей данных по оптическому волокну. Данные могут быть закодированы для того, чтобы передавать больше информации. При этом быстрое преобразование данных, закодированных датчиком позиции, может быть разрешено, и только одно оптическое волокно требуется для компоновки датчиков. Кроме того, тестовый сигнал может быть предоставлен для того, чтобы предоставлять указание состояния для датчика позиции.
В одном варианте осуществления компоновки датчиков для наблюдения за железной дорогой, в отслеживающем датчике тестовый сигнал подается в оптическое волокно, и тестовый сигнал оценивается для того, чтобы предоставлять указатель состояния. Например, с помощью тестового сигнала измерение может быть откалибровано, и затухание сигнала может быть определено.
В одном варианте осуществления компоновка датчиков для наблюдения за железной дорогой содержит, по меньшей мере, два блока субоценки, предоставляющих, по меньшей мере, один выходной сигнал каждый. Выходы блоков субоценки соединяются друг с другом, где один из них является двухсторонним. Каждый блок субоценки соединяется с датчиком позиции. По меньшей мере, один датчик позиции соединяется с блоком оценки через блок субоценки. По меньшей мере, один блок субоценки предоставляет объединенный выходной сигнал, который зависит от выходных сигналов, по меньшей мере, двух блоков субоценки. При этом информация, предоставленная посредством двух или более датчиков позиции, может быть объединена посредством блока субоценки. Например, для участка железнодорожного пути между двумя датчиками позиции блок субоценки может предоставлять информацию о занятости участка железнодорожного пути. Если только первый датчик позиции на участке железнодорожного пути обнаружил проезжающее рельсовое транспортное средство, блок субоценки может предоставлять информацию о том, что этот конкретный участок железнодорожного пути занят. Если также второй датчик позиции на этом конкретном участке железнодорожного пути обнаружил проезжающее рельсовое транспортное средство, блок субоценки может предоставлять информацию о том, что этот конкретный участок железнодорожного пути снова является свободным.
В одном варианте осуществления компоновка датчиков для наблюдения за железной дорогой содержит, по меньшей мере, два блока оценки и блок применения. Блок применения соединяется с выходами, по меньшей мере, двух блоков оценки, он содержит, по меньшей мере, один выход блока применения, и он оценивает информацию, предоставленную посредством, по меньшей мере, двух блоков оценки. При этом блок применения предоставляет общий вид датчиков в компоновке датчиков. Блок применения может добавлять дополнительную информацию, и он может выводить информацию. Например, блок применения может предоставлять информацию пользователю, и он предоставляет возможность оптимизировать организацию расписания и организацию скорости поездов.
В одном варианте осуществления способ оценки сигналов наблюдения за железной дорогой содержит этапы обнаружения проезжающего рельсового транспортного средства, по меньшей мере, в одной позиции на железнодорожном пути посредством датчика позиции, предоставляющего, по меньшей мере, один выходной сигнал позиции, и обнаружения позиции шума и рельсового транспортного средства на железнодорожном пути с помощью отслеживающего датчика. Отслеживающий датчик содержит волоконно-оптический датчик и оптическое волокно, которое размещается вдоль железнодорожного пути, так что отслеживающий датчик приспособлен для обнаружения позиции шума вдоль железнодорожного пути. Отслеживающий датчик предоставляет выходной сигнал отслеживания. Способ оценки сигналов наблюдения за железной дорогой дополнительно содержит предоставление текущей позиции рельсового транспортного средства посредством объединения выходного сигнала позиции и выходного сигнала отслеживания.
Таким образом, текущая позиция рельсового транспортного средства может быть определена в реальном времени в пределах точности измерения. Объединение информации, предоставленной посредством выходного сигнала позиции и выходного сигнала отслеживания, означает, что информация, обнаруженная только посредством датчика позиции, объединяется с информацией, обнаруженной только посредством отслеживающего датчика. При этом текущая позиция каждого рельсового транспортного средства на железнодорожном пути может быть определена без необходимости в дополнительных компонентах на рельсовых транспортных средствах. Особенно на международных железнодорожных путях рельсовые транспортные средства могут быть обнаружены без дополнительных компонентов на рельсовых транспортных средствах. При этом усложнения, получающиеся в результате различных стандартов в различных странах, устраняются. Кроме того, позиция рельсового транспортного средства не может быть определена лишь в фиксированных позициях датчиков позиции, но текущая позиция рельсового транспортного средства может также быть определена между предварительно определенными позициями и конкретными участками железнодорожного пути.
В одном варианте осуществления способа оценки сигналов наблюдения за железной дорогой датчик позиции содержит два датчика, приспособленных для обнаружения направления движения рельсовых транспортных средств, проезжающих над позицией датчика позиции. Два датчика могут быть, например, индуктивными датчиками. В одном варианте осуществления выходной сигнал позиции датчика позиции, содержащего два датчика, соответствует требованиям уровня полноты безопасности. При этом может быть определено, позиционируется ли рельсовое транспортное средство в некоторой области пути. Это означает, что может быть определено, занята ли некоторая область пути рельсовым транспортным средством, или свободна ли она.
В одном варианте осуществления способа оценки сигналов наблюдения за железной дорогой блок оценки предоставляет, по меньшей мере, один из следующих отличительных признаков:
текущую позицию рельсового транспортного средства, по меньшей мере, между двумя предварительно определенными позициями,
текущую позицию рельсового транспортного средств на конкретном участке железнодорожного пути,
текущую скорость рельсового транспортного средства,
текущее ускорение рельсового транспортного средства,
текущее направление движения рельсового транспортного средства,
позицию ползуна колеса рельсового транспортного средства,
позицию излома рельса на железнодорожном пути, по которому рельсовое транспортное средство движется,
позицию другого шума или вибраций вдоль железнодорожного пути, по которому рельсовое транспортное средство движется,
по какому пути рельсовое транспортное средство движется, в случае более чем одного пути, размещенных параллельно,
число осей рельсового транспортного средства,
диаметр осей рельсового транспортного средства,
длину рельсового транспортного средства, или
температуру в позиции датчика позиции.
С помощью информации, предоставленной посредством блока оценки, улучшенное наблюдение железнодорожного пути и движения рельсовых транспортных средств является возможным. Следовательно, может быть предоставлена возможность более безопасного и более эффективного железнодорожного движения.
Последующее описание чертежей может дополнительно иллюстрировать и объяснять примерные варианты осуществления. Компоненты, которые являются функционально идентичными или имеют идентичное действие, обозначаются идентичными ссылками. Идентичные или действенно идентичные компоненты могут быть описаны только со ссылкой на чертежи, где они появляются впервые. Их описание необязательно повторяется на последующих чертежах.
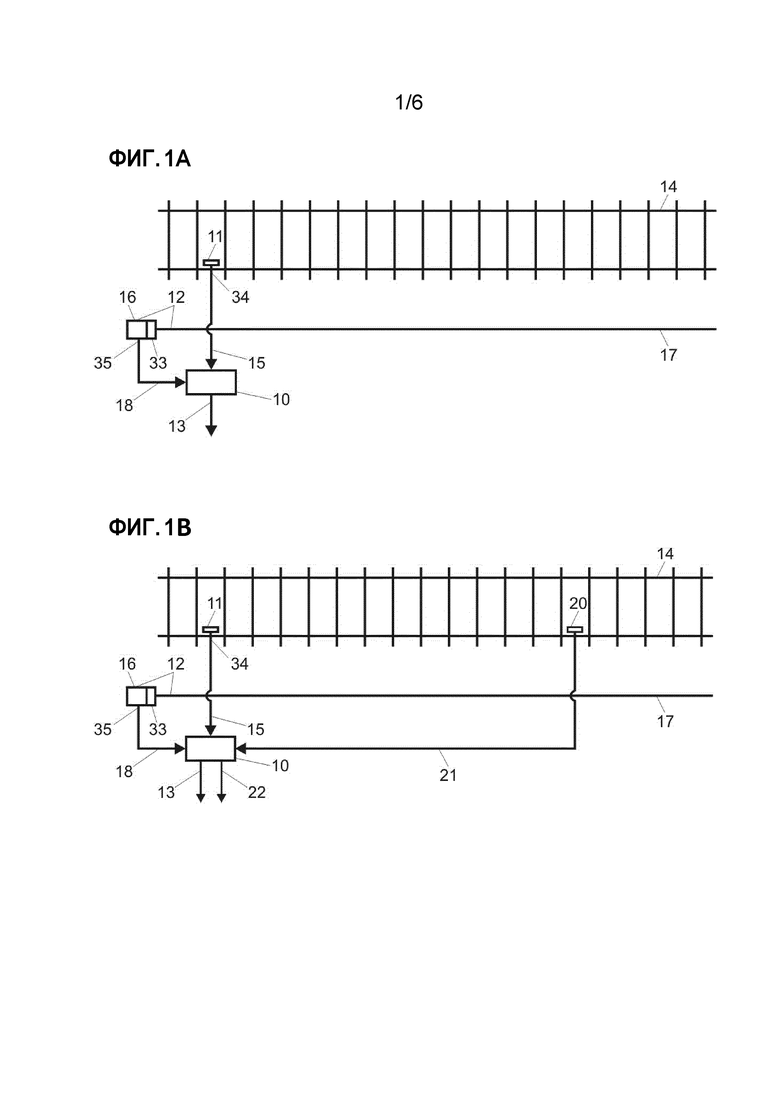
Фиг. 1A и 1B показывают примерные варианты осуществления компоновки датчиков для наблюдения за железной дорогой.
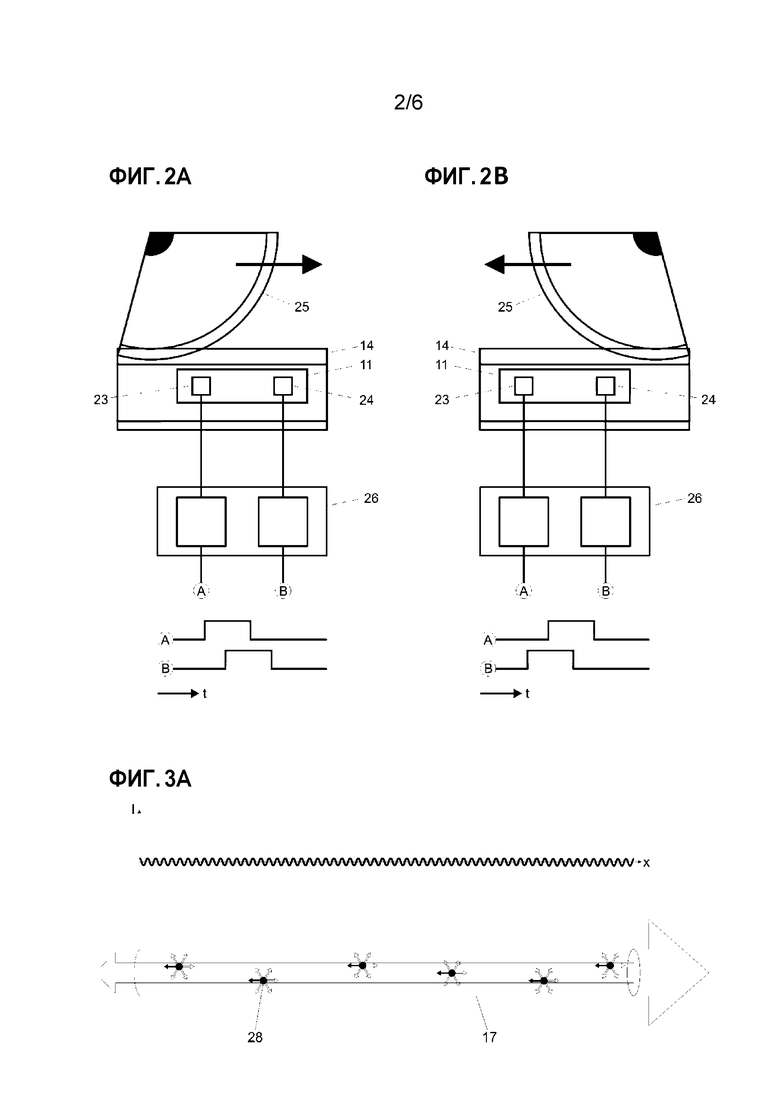
Фиг. 2A и 2B показывают принцип работы примерного варианта осуществления датчика позиции.
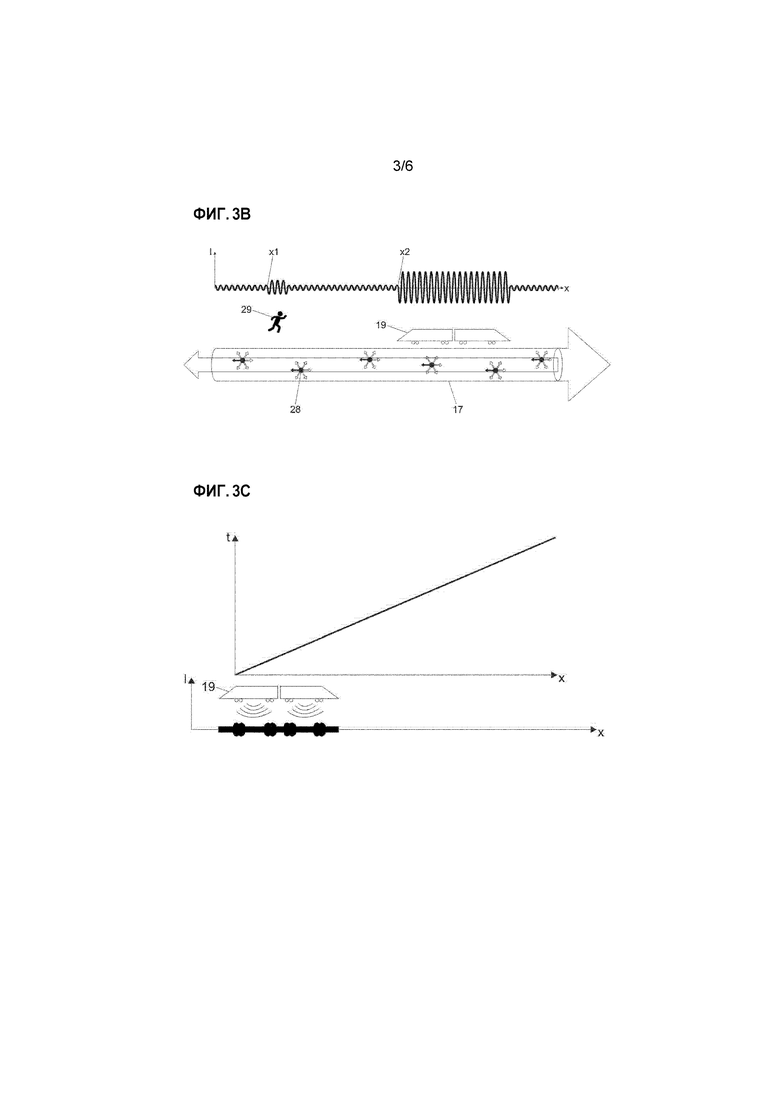
Фиг. 3A, 3B и 3C показывают принцип работы примерного варианта осуществления отслеживающего датчика.
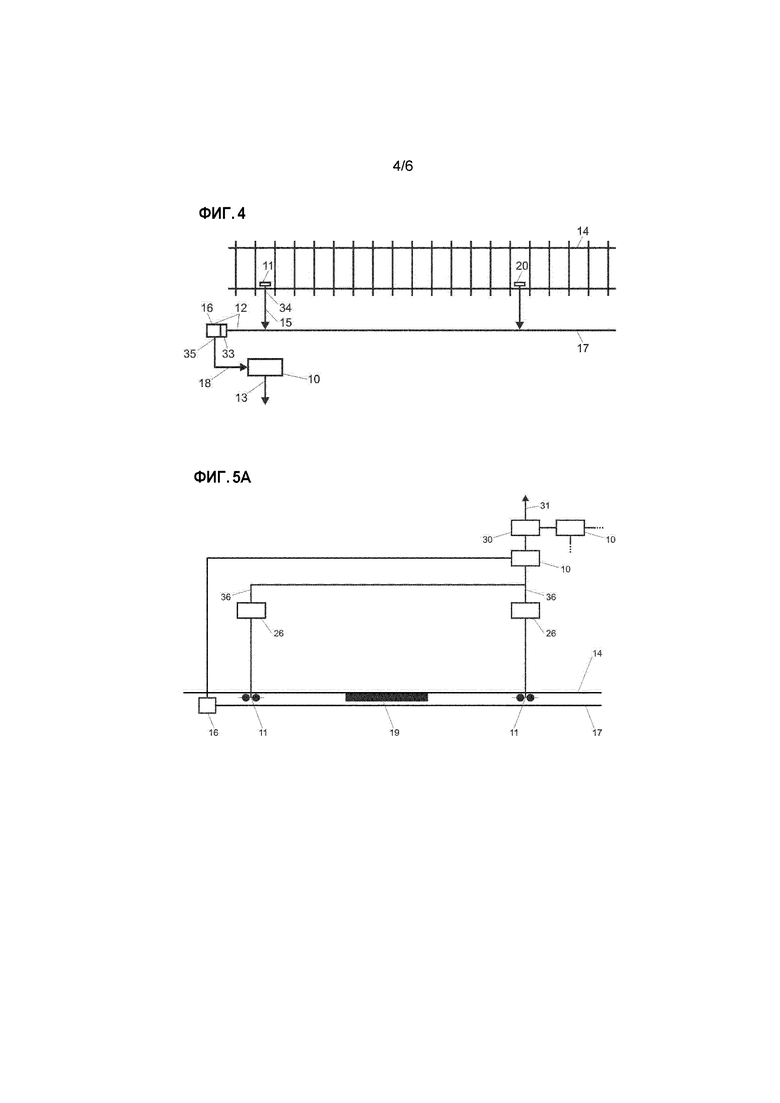
Фиг. 4 показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с двумя датчиками позиции.
Фиг. 5A показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с одним железнодорожным путем.
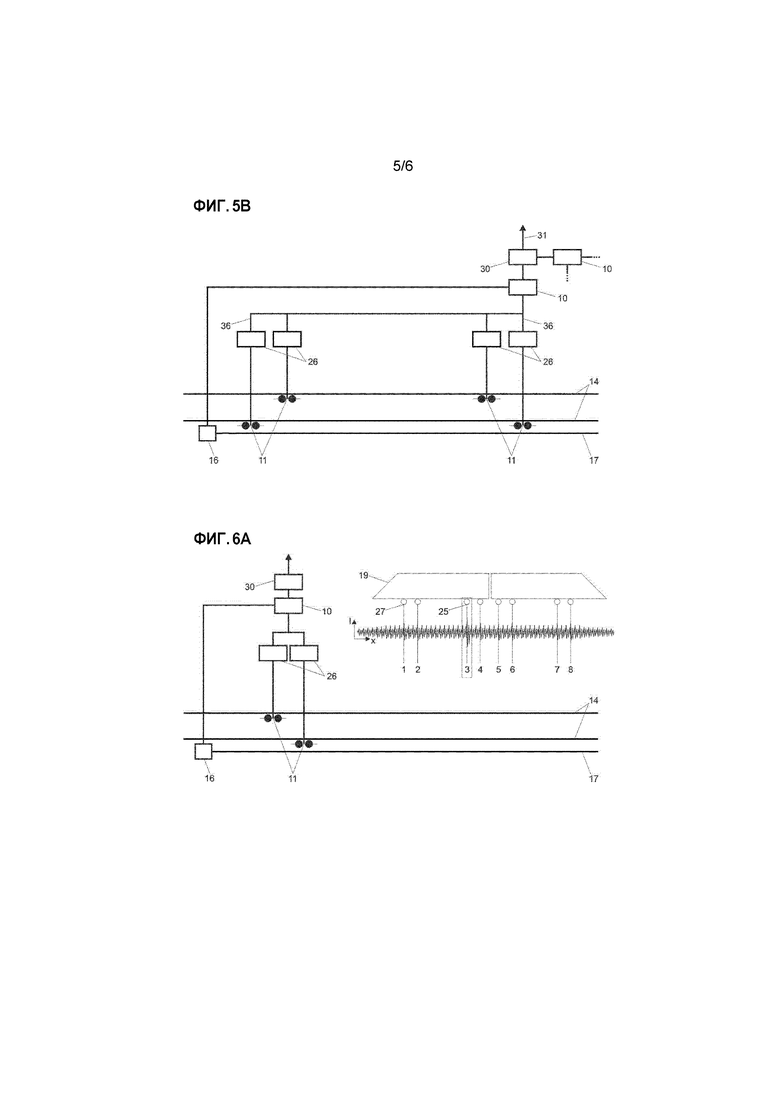
Фиг. 5B показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с двумя железнодорожными путями.
Фиг. 6A показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с двумя железнодорожными путями и показывает примерный выходной сигнал отслеживания.
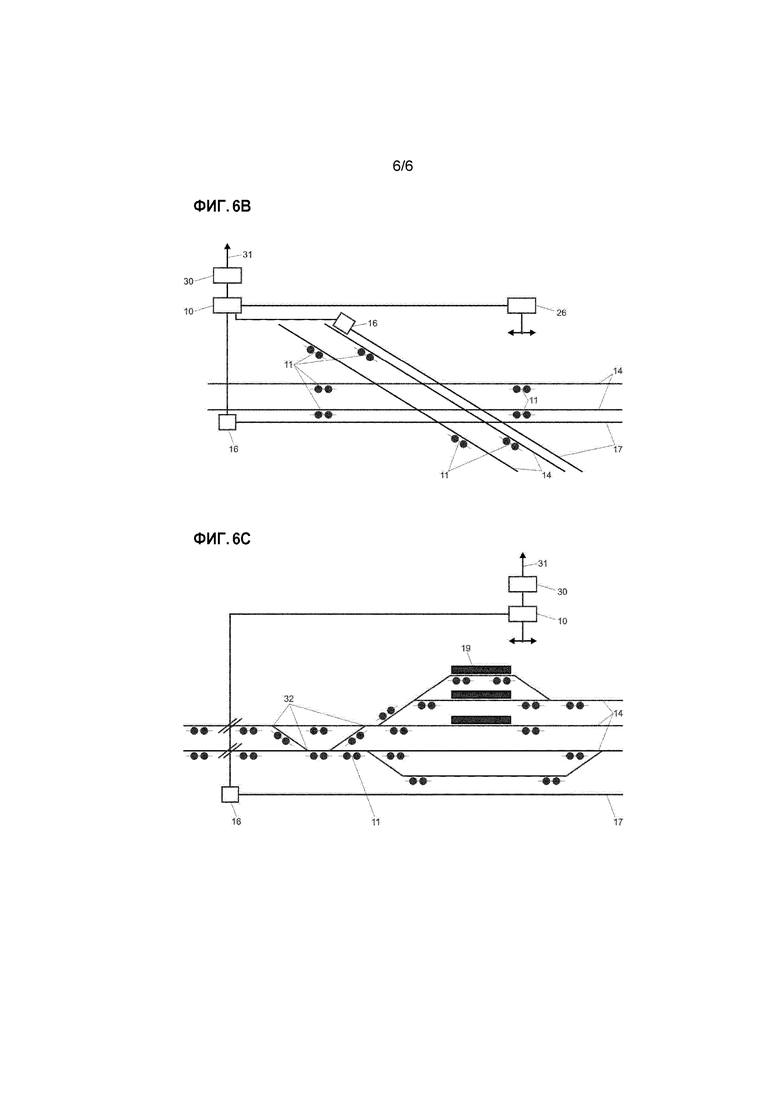
Фиг. 6B показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с четырьмя железнодорожными путями, пересекающимися друг с другом.
Фиг. 6C показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с несколькими железнодорожными путями на станции.
Фиг. 1A показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой, содержащей датчик 11 позиции и отслеживающий датчик 12. По меньшей мере, один датчик 11 позиции размещается на железнодорожном пути 14 таким способом, что датчик 11 позиции может обнаруживать рельсовые транспортные средства 19, проезжающие над позицией датчика 11 позиции. Выход 34 датчика позиции соединяется с блоком 10 оценки. Датчик 11 позиции предоставляет выходной сигнал 15 позиции блоку 10 оценки. Отслеживающий датчик 12 содержит волоконно-оптический датчик 16, источник 33 света, который может быть источником импульсного сигнала, оптическое волокно 17 и выход 35 отслеживающего датчика. Источник 33 сигнала может отправлять световые импульсы в оптическое волокно 17, и обратнорассеянный сигнал может быть обнаружен посредством волоконно-оптического датчика 16. Оптическое волокно 17 размещается вдоль железнодорожного пути 14 и размещается в непосредственной близости к железнодорожному пути 14, так что отслеживающий датчик 12 приспособлен для обнаружения позиции шума вдоль железнодорожного пути 14. Выход 35 отслеживающего датчика соединяется с блоком 10 оценки и предоставляет выходной сигнал 18 отслеживания блоку 10 оценки. Блок 10 оценки предоставляет выходной сигнал 13, который зависит от выходного сигнала 15 позиции и выходного сигнала 18 отслеживания. При этом блок 10 оценки может предоставлять текущую позицию рельсового транспортного средства 19 на железнодорожном пути 14.
Фиг. 1B показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой, содержащей два датчика 11 позиции и отслеживающий датчик 12. Оба датчика 11 позиции и отслеживающий датчик 12 соединяются с блоком 10 оценки. Первый датчик 11 позиции предоставляет первый выходной сигнал 15 позиции блоку 10 оценки. Второй датчик 20 позиции предоставляет второй выходной сигнал 21 позиции блоку 10 оценки. При этом текущая позиция рельсового транспортного средства 19 между двумя предварительно определенными позициями, например, между двумя датчиками 11 и 20 позиции, может быть предоставлена посредством блока 10 оценки. Блок 10 оценки может предоставлять дополнительный выходной сигнал 22, который зависит только от первого выходного сигнала 15 позиции и второго выходного сигнала 21 позиции. Дополнительный выходной сигнал 22 может соответствовать требованиям уровня полноты безопасности.
Фиг. 2A показывает принцип работы примерного варианта осуществления датчика 11 позиции. Датчик 11 позиции может быть установлен на железнодорожном пути 14. В этом варианте осуществления датчик 11 позиции содержит два датчика 23, 24. Оба датчика 23, 24 приспособлены для обнаружения проезжающего рельсового транспортного средства 19. Два датчика 23, 24 могут, например, содержать индуктивные датчики. Если рельсовое транспортное средство 19 проезжает с левой стороны в правую сторону на чертеже, первый датчик 23 обнаружит колесо 25 рельсового транспортного средства 19 прежде второго датчика 24. Блок 26 субоценки соединяется с датчиком 11 позиции. Блок 26 субоценки предоставляет выходной сигнал A первого датчика 23 и выходной сигнал B второго датчика 24. В нижней части на фиг. 2A выходные сигналы A и B нанесены относительно времени t. Показано, что первый датчик 23 обнаруживает проезжающее рельсовое транспортное средство 19 прежде второго датчика 24.
Фиг. 2B показывает тот же примерный вариант осуществления датчика 11 позиции, что и на фиг. 2A. На фиг. 2B проезжающее рельсовое транспортное средство 19, однако, движется с правой стороны в левую сторону на чертеже. Следовательно, в этом случае второй датчик 24 обнаруживает проезжающее рельсовое транспортное средство 19 прежде первого датчика 23.
Посредством оценки выходных сигналов A и B от первого и второго датчика 23, 24 датчика 11 позиции возможно определять, например, скорость проезжающего рельсового транспортного средства 19 в позиции датчика 11 позиции. Также возможно определять направление движения, число осей 27 рельсового транспортного средства 19, диаметр осей 27 и длину рельсового транспортного средства 19.
Фиг. 3A показывает оптическое волокно 17 с рассеивающими участками 28, которые могут быть, например, посторонними телами. Оптическое волокно 17 может быть, например, частью отслеживающего датчика 12. Свет, например, лазерный свет, подается в оптическое волокно 17, и большая часть света движется сквозь все оптическое волокно 17, которое указывается более крупной стрелкой, указывающей в направлении x. Небольшая часть света отражается обратно в противоположном направлении на рассеивающих участках 28. Обратнорассеянный свет указывается меньшей стрелкой, указывающей в направлении -x. График в верхней части на фиг. 3A показывает интенсивность обратнорассеянного света, нанесенную относительно расстояния x вдоль оптического волокна 17. В этом случае, не существуют звуковые волны или вибрации в непосредственной близости к оптическому волокну 17, так что график показывает только шумовой сигнал.
Фиг. 3B показывает оптическое волокно 17 с рельсовым транспортным средством 19 и человеком 29, движущимся в непосредственной близости к оптическому волокну 17. Звуковые волны или вибрации, вызванные движущимся рельсовым транспортным средством 19 и движущимся человеком 29, слегка изгибают оптическое волокно 17 в его соответствующей позиции, так что большая часть света в оптическом волокне 17 обратно рассеивается. Следовательно, интенсивность обратнорассеянного сигнала увеличивается в позиции x1, где движется человек 29. Интенсивность обратнорассеянного сигнала также увеличивается в позиции x2, где движется рельсовое транспортного средства 19. Так как интенсивность обратнорассеянного сигнала наносится относительно расстояния x вдоль оптического волокна 17, которое размещается вдоль железнодорожного пути 14, позиция человека 29 и рельсового транспортного средства 19 вдоль железнодорожного пути 14 может быть определена. Также возможно определять местоположение другого шума в непосредственной близости к оптическому волокну 17, такого как, например, рабочие группы, животные или окружающие события, такие как камнепады и оползни.
Верхний график на фиг. 3C показывает для каждого времени t, где рельсовое транспортное средство 19 позиционируется вдоль железнодорожного пути 14. Нижний график на фиг. 3C показывает интенсивность обратнорассеянного сигнала в оптическом волокне 17 в направлении x вдоль железнодорожного пути 14. В позиции рельсового транспортного средства 19 интенсивность обратнорассеянного сигнала увеличивается.
Фиг. 4 показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой, в котором два датчика 11, 20 позиции соединяются с оптическим волокном 17. В этом варианте осуществления данные, обнаруженные посредством датчиков 11, 20 позиции, передаются блоку 10 оценки по оптическому волокну 17. Следовательно, датчики 11, 20 позиции соединяются с блоком 10 оценки через отслеживающий датчик 12. Данные, обнаруженные посредством датчиков 11, 20 позиции, могут, например, быть переданы оптическому волокну 17 посредством электрически управляемого пьезоэлемента. Данные, обнаруженные посредством датчиков 11, 20 позиции, могут быть закодированы, например, посредством частотной модуляции, перед передачей данных по оптическому волокну 17. Данные могут быть закодированы для того, чтобы передавать больше информации.
Фиг. 5A показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с одним железнодорожным путем 14. Вдоль железнодорожного пути 14 размещаются два датчика 11 позиции, каждый содержит два датчика 23, 24. Между двумя датчиками 11 позиции располагается рельсовое транспортное средство 19. Кроме того, оптическое волокно 17 размещается вдоль рельсового пути 14. Волоконно-оптический датчик 16 размещается на оптическом волокне 17. Датчики 11 позиции, каждый, соединяются с блоком 26 субоценки. Два блока 26 субоценки содержат выходы 36 блока субоценки. Два блока 26 субоценки и отслеживающий датчик 12 соединяются с блоком 10 оценки. Следовательно, два датчика 11 позиции соединяются с блоком 10 оценки через блоки 26 субоценки. Блок 30 применения может быть соединен с блоком 10 оценки и дополнительным блоком 10 оценки. Блок 30 применения может содержать выход 31 блока применения. Два блока 26 субоценки могут оценивать выходные сигналы 15 позиции двух датчиков 11 позиции. При этом возможно предоставлять информацию, если рельсовое транспортное средство 19 располагается между двумя датчиками 11 позиции. Блок 10 оценки объединяет выходные сигналы 15 позиции и выходной сигнал 18 отслеживания. Таким образом, блок 10 оценки может предоставлять текущую позицию рельсового транспортного средства 19 на железнодорожном пути 14. Блок 30 применения может оценивать информацию, предоставленную, по меньшей мере, двумя блоками 10 оценки.
Фиг. 5B показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с двумя железнодорожными путями 14, размещенными параллельно. Два датчика 11 позиции, содержащие два датчика 23, 24, каждый, размещаются на каждом из двух железнодорожных путей 14. Каждый датчик 11 позиции соединяется с блоком 26 субоценки. Одно оптическое волокно 17 размещается вдоль двух железнодорожных путей 14. В этом варианте осуществления невозможно четко определять, по какому железнодорожному пути 14 рельсовое транспортное средство 19 движется, только посредством оценки выходного сигнала 18 отслеживания. Следовательно, блок 10 оценки объединяет четыре выходных сигнала 15 позиции и выходной сигнал 18 отслеживания для того, чтобы предоставлять текущую позицию рельсового транспортного средства 19 на железнодорожном пути 14.
Фиг. 6A показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с двумя железнодорожными путями 14, размещенными параллельно. Для примера, один датчик 11 позиции размещается на каждом железнодорожном пути 14. Оптическое волокно 17 размещается вдоль железнодорожного пути 14. График на фиг. 6A показывает интенсивность обратнорассеянного сигнала оптического волокна 17, нанесенную относительно расстояния x вдоль железнодорожного пути 14. Позиции 1-8 в обратнорассеянном сигнале с повышенной интенсивностью могут быть связаны с осями 27 движущегося рельсового транспортного средства 19. Как выделено в позиции 3, интенсивность дополнительно увеличивается в сравнении с другими позициями, указывая, например, ползун колеса на соответствующем колесе 25 в рельсовом транспортном средстве 19.
Фиг. 6B показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с четырьмя железнодорожными путями 14, пересекающимися друг с другом. Два железнодорожных пути 14, каждый, размещаются параллельно. Около пересечения железнодорожных путей 14 датчики 11 позиции размещаются на каждом железнодорожном пути 14. Кроме того, для каждых двух параллельных железнодорожных путей 14 одно оптическое волокно 17 размещается вдоль железнодорожных путей 14. Два волоконно-оптических датчика 16 соединяются с блоком 10 оценки. Все датчики 11 позиции соединяются с блоком 26 субоценки, который не показан, а указывается лишь двумя стрелками под блоком 10 оценки. Блок 10 оценки соединяется с блоком 30 применения. Наблюдение за пересечением четырех железнодорожных путей 14 с помощью датчиков 11 позиции и отслеживающих датчиков 12 предоставляет возможность безопасного движения по пересечению.
Фиг. 6C показывает примерный вариант осуществления компоновки датчиков для наблюдения за железной дорогой с несколькими железнодорожными путями 14 и несколькими разъездами 32. Несколько железнодорожных путей 14 размещаются параллельно и соединяются разъездами 32, как, например, на станции. Одно оптическое волокно 17 размещается вдоль железнодорожных путей 14. Датчики 11 позиции размещаются впереди и позади каждого разъезда 32 и на каждом железнодорожном пути 14. Каждый датчик 11 позиции соединяется с блоком 10 оценки, который не показан, а лишь указан двумя стрелками под блоком 10 оценки. С такой компоновкой возможно определять, какие участки станции заняты рельсовым транспортном средством 19, и какие участки свободны для рельсового транспортного средства 19.
Список ссылочных номеров
10: блок оценки
11: датчик позиции
12: отслеживающий датчик
13: выходной сигнал
14: железнодорожный путь
15: выходной сигнал позиции
16: волоконно-оптический датчик
17: оптическое волокно
18: выходной сигнал отслеживания
19: рельсовое транспортное средство
20: второй датчик позиции
21: второй выходной сигнал позиции
22: дополнительный выходной сигнал
23: первый датчик
24: второй датчик
25: колесо
26: блок субоценки
27: ось
28: рассеивающие участки
29: человек
30: блок применения
31: выход блока применения
32: разъезд
33: источник света
34: выход датчика позиции
35: выход отслеживающего датчика
36: выход блока субоценки
A: выходной сигнал
B: выходной сигнал.
Изобретение относится к средствам определения местоположения рельсовых транспортных средств. Блок (10) оценки содержит соединение с датчиком (11) позиции и соединение с отслеживающим датчиком (12). Датчик (11) позиции приспособлен для обнаружения рельсовых транспортных средств (19), проезжающих над позицией датчика (11) позиции по железнодорожному пути (14), и предоставляет выходной сигнал (15) позиции. Отслеживающий датчик (12) содержит волоконно-оптический датчик (16), который приспособлен для обнаружения позиции шума вдоль железнодорожного пути (14), и отслеживающий датчик (12) предоставляет выходной сигнал (18) отслеживания. Блок (10) оценки предоставляет выходной сигнал (13), который зависит от выходного сигнала (15) позиции и выходного сигнала (18) отслеживания. Достигается повышение точности определения местоположения рельсовых транспортных средств. 3 н. и 12 з.п. ф-лы, 13 ил.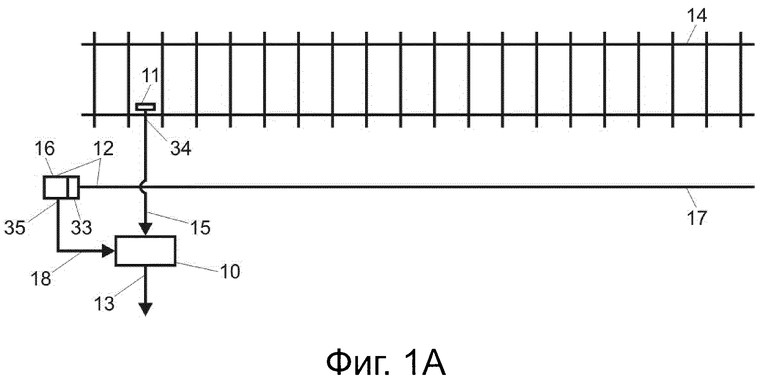
1. Блок (10) оценки для компоновки датчиков для наблюдения за железной дорогой, блок (10) оценки содержит:
соединение с датчиком (11) позиции, приспособленным для обнаружения рельсовых транспортных средств (19), проезжающих над позицией датчика (11) позиции по железнодорожному пути (14), и предоставления выходного сигнала (15) позиции, и
соединение с отслеживающим датчиком (12), который содержит волоконно-оптический датчик (16), который приспособлен для обнаружения позиции шума вдоль железнодорожного пути (14), и который предоставляет выходной сигнал (18) отслеживания, при этом
блок (10) оценки предоставляет выходной сигнал (13), который зависит от выходного сигнала (15) позиции и выходного сигнала (18) отслеживания, при этом блок (10) оценки приспособлен для предоставления текущей позиции рельсового транспортного средства (19) на железнодорожном пути (14) посредством объединения информации, предоставленной посредством выходного сигнала (15) позиции и выходного сигнала (18) отслеживания.
2. Блок (10) оценки для компоновки датчиков для наблюдения за железной дорогой по одному из предыдущих пунктов, при этом блок (10) оценки предоставляет информацию, по какому железнодорожному пути (14) рельсовое транспортное средство (19) движется в случае более чем одного железнодорожного пути (14), размещенных параллельно, каждый железнодорожный путь (14) имеет, по меньшей мере, один датчик (11) позиции, предназначенный для него.
3. Блок (10) оценки для компоновки датчиков для наблюдения за железной дорогой по одному из предыдущих пунктов, при этом блок (10) оценки предоставляет информацию, по меньшей мере, об одном из следующего:
текущей позиции рельсового транспортного средства (19), по меньшей мере, между двумя предварительно определенными позициями,
текущей позиции рельсового транспортного средства (19) на конкретном участке железнодорожного пути (14),
текущей скорости рельсового транспортного средства (19),
текущего ускорения рельсового транспортного средства (19),
текущего направления движения рельсового транспортного средства (19),
позиции ползуна колеса рельсового транспортного средства (19),
позиции излома рельса на железнодорожном пути (14), по которому рельсовое транспортное средство (19) движется,
позиции другого шума или вибраций вдоль железнодорожного пути (14), по которому рельсовое транспортное средство (19) движется,
по какому железнодорожному пути (14) рельсовое транспортное средство (19) движется в случае более чем одного железнодорожного пути (14), размещенных параллельно,
числе осей (27) рельсового транспортного средства (19),
диаметре осей (27) рельсового транспортного средства (19),
длине рельсового транспортного средства (19), или
температуре в позиции датчика (11) позиции.
4. Блок (10) оценки для компоновки датчиков для наблюдения за железной дорогой по одному из предыдущих пунктов, при этом блок (10) оценки предоставляет дополнительный выходной сигнал (22), который зависит только от выходного сигнала (15) позиции, по меньшей мере, одного датчика (11) позиции, и при этом дополнительный выходной сигнал (22) соответствует требованиям уровня полноты безопасности.
5. Компоновка датчиков для наблюдения за железной дорогой, содержащая
блок (10) оценки по одному из пп. 1-4,
по меньшей мере, один датчик (11) позиции с выходом (34) датчика позиции, и
по меньшей мере, один отслеживающий датчик (12) с выходом (35) отслеживающего датчика, при этом
блок (10) оценки соединяется с выходом (34) датчика позиции и выходом (35) отслеживающего датчика.
6. Компоновка датчиков для наблюдения за железной дорогой по п. 5, при этом датчик (11) позиции содержит одно или более из следующего:
индуктивный датчик,
емкостной датчик,
механический датчик,
оптический датчик,
тензометрический датчик,
пьезоэлектрический датчик, или
радиолокационный датчик.
7. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5, 6, в которой волоконно-оптический датчик (16) обнаруживает свет, в частности лазерный свет, обратнорассеянный в оптическом волокне (17), где обратнорассеянный сигнал указывает позицию шума вдоль оптического волокна (17), так что позиция рельсового транспортного средства (19) на железнодорожном пути (14) и другого шума на или вдоль железнодорожного пути (14) может быть определена.
8. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5-7, в которой отслеживающий датчик (12) содержит распределенный акустический датчик.
9. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5-8, в которой отслеживающий датчик (12) содержит источник (33) импульсного сигнала и/или оптическое волокно (17), где данные, обнаруженные посредством датчика (11) позиции передаются блоку (10) оценки по оптическому волокну (17).
10. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5-9, в которой в отслеживающем датчике (12) тестовый сигнал подается в оптическое волокно (17), и тестовый сигнал оценивается для того, чтобы предоставлять указатель состояния.
11. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5-10, содержащая, по меньшей мере, два блока (26) субоценки, предоставляющих, по меньшей мере, один выходной сигнал, каждый, где
каждый блок (26) субоценки соединяется с датчиком (11) позиции,
по меньшей мере, один датчик (11) позиции соединяется с блоком (10) оценки через блок (26) субоценки,
выходы (36) блока субоценки соединяются друг с другом, из которых, по меньшей мере, один является двухсторонним, и
по меньшей мере, один блок (26) субоценки предоставляет объединенный выходной сигнал, который зависит от выходных сигналов, по меньшей мере, двух блоков (26) субоценки, и, по меньшей мере, один блок (26) субоценки соединяется с блоком (10) оценки.
12. Компоновка датчиков для наблюдения за железной дорогой по одному из пп. 5-11, содержащая
по меньшей мере, два блока (10) оценки, и
блок (30) применения, который
соединяется с выходами, по меньшей мере, двух блоков (10) оценки,
содержит, по меньшей мере, один выход (31) блока применения, и
оценивает информацию, предоставленную посредством, по меньшей мере, двух блоков (10) оценки.
13. Способ оценки сигналов наблюдения за железной дорогой, содержащий следующие этапы, на которых:
обнаруживают проезжающее рельсовое транспортное средство (19), по меньшей мере, в одной позиции вдоль железнодорожного пути (14) посредством датчика (11) позиции, предоставляющего, по меньшей мере, один выходной сигнал (15) позиции,
обнаруживают позицию шума и рельсового транспортного средства (19) вдоль железнодорожного пути (14) с помощью отслеживающего датчика (12), отслеживающий датчик (12) содержит волоконно-оптический датчик (16) и оптическое волокно (17), которое размещается вдоль железнодорожного пути (14), так что отслеживающий датчик (12) приспособлен для обнаружения позиции шума вдоль железнодорожного пути (14), и отслеживающий датчик (12) предоставляет выходной сигнал (18) отслеживания, и
предоставляют текущую позицию рельсового транспортного средства (19) на железнодорожном пути (14) посредством информации, предоставленной посредством объединения выходного сигнала (15) позиции и выходного сигнала (18) отслеживания.
14. Способ оценки сигналов наблюдения за железной дорогой по п. 13, в котором датчик (11) позиции содержит два датчика (23, 24), приспособленных для обнаружения направления движения рельсовых транспортных средств (19), проезжающих над позицией датчика (11) позиции.
15. Способ оценки сигналов наблюдения за железной дорогой, по одному из пп. 13, 14, в котором, по меньшей мере, один из следующих признаков может быть предоставлен посредством блока (10) оценки:
текущая позиция рельсового транспортного средства (19), по меньшей мере, между двумя предварительно определенными позициями,
текущая позиция рельсового транспортного средства (19) на конкретном участке железнодорожного пути (14),
текущая скорость рельсового транспортного средства (19),
текущее ускорение рельсового транспортного средства (19),
текущее направление движения рельсового транспортного средства (19),
позиция ползуна колеса рельсового транспортного средства (19),
позиция излома рельса на железнодорожном пути (14), по которому рельсовое транспортное средство (19) движется,
позиция другого шума или вибраций вдоль железнодорожного пути (14), по которому рельсовое транспортное средство (19) движется,
по какому железнодорожному пути (14) рельсовое транспортное средство (19) движется в случае более чем одного железнодорожного пути (14), размещенных параллельно,
число осей (27) рельсового транспортного средства (19),
диаметр осей (27) рельсового транспортного средства (19),
длина рельсового транспортного средства (19), или
температура в позиции датчика (11) позиции.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| EP 1582430 A1, 05.10.2005 | |||
| DE 3537588 A1, 27.04.1987. | |||

