Область техники, к которой относится изобретение
Данное изобретение относится к способам и системам для обнаружения создающих помехи сигналов, передаваемых из движущихся транспортных средств. Изобретение находит конкретное применение при обнаружении и идентификации транспортных средств, подозреваемых в наличии генераторов помех, предназначенных для того, чтобы нарушать работу противоугонных отслеживающих устройств.
Уровень техники
Глобальные спутниковые навигационные системы (GNSS), такие как глобальная система позиционирования (GPS), Galileo, ГЛОНАСС, COMPASS, BeiDou и т.п., используют созвездие спутников, передающих в широковещательном режиме синхронизирующие сигналы, чтобы давать возможность вычисления информации позиции и скорости. Синхронизирующие сигналы принимаются и коррелируются посредством приемных GNSS-устройств, чтобы определять время пролета принимаемого синхронизирующего сигнала из каждого спутника. Время пролета затем может комбинироваться с информацией относительно местоположения спутников, чтобы вычислять позицию и скорость приемного устройства.
Синхронизирующие сигналы передаются в широковещательном режиме с использованием технологий на основе расширенного спектра вследствие слабой природы таких сигналов. Синхронизирующие сигналы передаются в широковещательном режиме из спутников в предварительно заданных полосах частот, например, в полосе частот L1 (1559-1591 МГц), в полосе частот L2 (1215-1237 МГц) и в полосе частот L5 (1164-1192 МГц).
Отслеживающие устройства, к примеру, противоугонные отслеживающие устройства, зачастую устанавливаются в транспортных средствах, чтобы давать возможность удаленного мониторинга перемещения и местоположения транспортного средства. Это может помогать находить украденные транспортные средства или в других отношениях, к примеру, при обеспечении того, что транспортные средства управляются в соответствии с правилами дорожного движения.
Отслеживающие устройства работают по-разному. Некоторые средства отслеживания для предотвращения угонов передают маяковый радиосигнал, который может обнаруживаться посредством приемного устройства маяковых радиосигналов. Такие системы требуют нахождения приемного устройства маяковых радиосигналов достаточно близко к транспортному средству, чтобы обнаруживать маяковый радиосигнал. Такие системы могут иметь диапазон только в несколько километров и не дают возможность удаленного мониторинга абсолютного местоположения и курса транспортного средства.
Другие более тщательно продуманные системы отслеживания включают в себя приемное GNSS-устройство, соединенное с сотовым сетевым приемо-передающим устройством. Приемное GNSS-устройство формирует данные местоположения, которые периодически передаются посредством сотового сетевого приемо-передающего устройства через сотовую сеть стороне, отслеживающей транспортное средство. Она могут иметь форму текстового сообщения по протоколу SMS (службы коротких сообщений), содержащего координаты местоположения. Эта компоновка не требует работы выделенного приемного устройства маяковых радиосигналов около средства отслеживания и дает возможность мониторинга абсолютной позиции средства отслеживания в любом месте, где существует покрытие сотовой сети.
Один способ нарушать работу этого типа системы отслеживания состоит в том, чтобы передавать создающий помехи сигнал около приемного GNSS-устройства. Создающий помехи сигнал передается для или в полосе GNSS-частот (т.е. в полосе частот, в которой синхронизирующие сигналы передаются из спутников), уменьшая отношение "сигнал-шум" (SNR) принимаемых спутниковых сигналов в приемном GNSS-устройстве. Это мешает или полностью предотвращает формирование точных данных местоположения посредством приемного GNSS-устройства и, следовательно, предотвращает отслеживание местоположения транспортного средства посредством системы. Хотя являются нелегальными во множестве юрисдикций, устройства, адаптированные с возможностью испускать такие создающие помехи сигналы ("генераторы помех"), являются относительно недорогими и легкодоступными. Угонщик может красть транспортное средство и одновременно устанавливать генератор помех в транспортном средстве, чтобы предотвращать его удаленное отслеживание.
Помимо прерывания работы отслеживающих устройств, работа таких генераторов помех также может создавать помехи для работы других близлежащих приемных GNSS-устройств, к примеру, приемных GNSS-устройств в спутниковых навигационных системах в других транспортных средствах.
Генераторы помех могут быть выполнены с возможностью передавать в широковещательном режиме создающие помехи сигналы на других частотах, к примеру, на частотах, на которых передаются маяковые радиосигналы, как пояснено выше, и на частотах, которые должны создавать помехи для сотовых сетевых передач.
Следовательно, существует потребность обнаруживать работу генераторов помех, в частности, работу генератора помех, который может быть ассоциирован с угоном транспортного средства.
Сущность изобретения
В соответствии с первым аспектом изобретения, предусмотрен способ идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот. Способ содержит мониторинг предварительно заданной полосы частот в первом местоположении, чтобы идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства. Если создающий помехи сигнал обнаруживается, способ дополнительно содержит захват первого изображения проезжающего транспортного средства, чтобы предоставлять возможность определения идентификатора проезжающего транспортного средства.
Присутствие работающего генератора помех в транспортном средстве, в частности, генератора помех, испускающего создающие помехи сигналы в частотном диапазоне, которое с большой вероятностью нарушает работу отслеживающего устройства, может служить признаком кражи автомобиля. В соответствии с этим аспектом настоящего изобретения, предусмотрен способ обнаружения присутствия передающих устройств испускания помех (например, генераторов помех) около области, которую проезжают транспортные средства, например, на портальной раме на дороге. Дополнительно, при обнаружении потенциально создающего помехи сигнала, способ включает в себя этап захвата изображений, за счет этого захватывая изображение, который может содержать транспортное средство, содержащее генератор помех. Преимущественно, способ может реализовываться с использованием хорошо развитой инфраструктуры (например, придорожных камер, размещаемых на портальных рамах) за счет этого предоставляя возможность определения идентификатора транспортного средства, подозреваемого в наличии генератора помех.
Необязательно, способ дополнительно содержит выполнение процесса распознавания изображений для первого изображения, чтобы распознавать признак проезжающего транспортного средства.
Необязательно, распознанный признак представляет собой номерной знак.
Необязательно, способ дополнительно содержит поиск в базе данных идентификаторов транспортных средств, содержащей сведения транспортных средств, ассоциированные со сведениями номерных знаков, чтобы определять идентификатор проезжающего транспортного средства на основе распознанного номерного знака.
Системы для распознавания номерного знака (например, государственного регистрационного номера/регистрационного знака) транспортного средства из захваченного изображения являются общепринятыми и интегрированы в существующую инфраструктуру мониторинга трафика (например, системы придорожных камер). Эти системы могут быть легко адаптированы с возможностью обнаруживать идентификатор транспортного средства, подозреваемого в наличии генератора помех, и предоставлять удобные интерфейсы для передачи информации третьим сторонам, к примеру, правоохранительным органам.
Необязательно, способ дополнительно содержит захват временных данных, ассоциированных со временем, в которое захвачено изображение, и/или захват данных местоположения, ассоциированных с первым местоположением.
Необязательно, способ дополнительно содержит формирование сообщения отслеживания транспортных средств, содержащего сведения распознанного номерного знака и временные данные и/или данные местоположения, и отправку сообщения отслеживания транспортных средств третьей стороне.
Посредством захвата дополнительной информации, такой как временные данные и данные местоположения, дополнительная полезная информация может передаваться третьим сторонам, пытающимся перехватывать транспортные средства, содержащие генераторы помех, такая как курс транспортного средства в конкретное время.
Необязательно, этап мониторинга полосы частот в первом местоположении содержит мониторинг полосы частот с помощью множества направленных антенн, причем каждая направленная антенна направлена в предварительно определенном направлении, и оценку позиции транспортного средства в первом изображении на основе того, какая из направленных антенн обнаруживает создающий помехи сигнал.
Направленные антенны представляют собой антенны, которые выполнены с возможностью обнаруживать испускания из передающего устройства из конкретного направления. В некоторых примерах, чтобы различать между несколькими транспортными средствами, которые могут быть включены в захваченное изображение, например, если камера направлена на дорогу с несколькими полосами движения, либо если камера захватывает изображение области, которая может заниматься посредством более одного транспортного средства, направленные антенны могут использоваться для того, чтобы оценивать позицию транспортного средства, когда изображение захвачено. Это может использоваться в ходе процесса распознавания изображений, чтобы идентифицировать область захваченного изображения, которая с наибольшей вероятностью должна содержать транспортное средство, содержащее генератор помех.
Необязательно, каждое предварительно определенное направление соответствует полосе движения дороги.
Необязательно, предварительно заданная частота отслеживается во множестве дополнительных местоположений. Способ дополнительно содержит захват дополнительных изображений в каждом из дополнительных местоположений, в которых обнаруживается создающий помехи сигнал, и анализ первого изображения и дополнительных изображений посредством идентификации транспортных средств, общих для первого изображения и, по меньшей мере, некоторых дополнительных изображений, чтобы идентифицировать проезжающее транспортное средство, испускающее создающий помехи сигнал.
В некоторых примерах, предусмотрено несколько компоновок захвата изображений (например, камер, размещаемых на нескольких портальных рамах вдоль участка дороги). Если транспортное средство, содержащее работающий генератор помех, движется по такому участку дороги, то захватываются несколько изображений. Эти изображения могут быть коррелированы для того, чтобы оценивать дополнительную информацию о транспортном средстве, такую как направление и средняя скорость. Это позволяет предоставлять дополнительную полезную информацию третьим сторонам, пытающимся перехватывать транспортное средство.
Необязательно, способ дополнительно содержит захват временных данных, ассоциированных со временем, в которое захвачены первое изображение и дополнительные изображения, и захват данных местоположения, ассоциированных с первым местоположением и дополнительными местоположениями, в которых захвачены первые изображения и дополнительные изображения.
Необязательно, способ дополнительно содержит оценку направления и/или скорости проезжающего транспортного средства на основе временных данных и данных местоположения.
В некоторых примерах, мониторинг полосы частот в первом местоположении содержит сбор данных изменения фазы, соответствующих изменению разности фаз между первой фазой и второй фазой, причем первая фаза представляет собой фазу создающего помехи сигнала, принимаемого в первой позиции, а вторая фаза представляет собой фазу фазой создающего помехи сигнала, принимаемого во второй позиции, и оценку, из данных изменения фазы, позиции проезжающего транспортного средства в изображении.
Известны традиционные технологии для оценки местоположения передающего устройства относительно определенного числа пространственно разнесенных приемных устройств. Эти технологии заключают в себе сравнение разностей между сигналом, принимаемым в различных приемных устройствах (например, разности временной задержки поступления или разности частоты сигнала) и извлечение, из них, информации относительно местоположения и/или скорости передающего устройства относительно приемных устройств. Тем не менее, такие традиционные технологии, в общем, не являются подходящими для использования в отслеживании автомобилей, поскольку предусмотренные скорости и расстояния не обуславливают достаточно значительные разности в сигнале, чтобы формировать точную информацию, и типично требуются несколько приемных устройств.
Тем не менее, в соответствии с этим примером, выявлено, что изменение разности фаз между создающим помехи сигналом, принимаемым в двух приемных устройствах, предоставляет полезную информацию относительно пути транспортного средства (т.е. траектории, по которой следует транспортное средство по земле), даже при относительно низких скоростях и расстояниях, возникающих в ходе перемещения типичного автомобиля. Информация относительно пути транспортного средства по мере того, как оно проезжает два приемных устройства, может использоваться для того, чтобы точно определять его позицию в захваченном изображении.
В некоторых примерах, этап оценки позиции проезжающего транспортного средства в изображении содержит согласование данных изменения фазы с моделью изменения фазы, причем упомянутая модель изменения фазы представляет собой модель изменения разности фаз между первой и второй фазой с использованием набора параметров, причем упомянутые параметры включают в себя скорость и путь транспортного средства; определение параметров модели; формирование, из параметров модели, оцененного пути и оцененной скорости проезжающего транспортного средства и использование оцененного пути и оцененной скорости проезжающего транспортного средства для того, чтобы определять позицию проезжающего транспортного средства в захваченном изображении.
Необязательно, предварительно заданная полоса частот представляет собой полосу частот, в которой передаются GNSS-сигналы.
Необязательно, первое местоположение представляет собой портальную раму, размещаемую на дороге.
В соответствии со вторым аспектом изобретения, предусмотрена система для идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот. Система содержит детектор, размещаемый в первом местоположении, выполненный с возможностью отслеживать предварительно заданную полосу частот и идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства, и камеру. Если детектор обнаруживает создающий помехи сигнал, детектор выполнен с возможностью отправлять инициирующий сигнал, инструктирующий камере захватывать первое изображение проезжающего транспортного средства, за счет этого обеспечивая возможность определения идентификатора проезжающего транспортного средства.
Необязательно, система дополнительно содержит процессор изображений, выполненный с возможностью осуществлять процесс распознавания изображений для первого изображения, чтобы распознавать признак проезжающего транспортного средства.
Необязательно, распознанный признак представляет собой номерной знак.
Необязательно, система дополнительно содержит модуль управления камерой, выполненный с возможностью захватывать временные данные, ассоциированные со временем, в которое захвачено изображение, и/или захватывать данные местоположения, ассоциированные с первым местоположением.
Необязательно, процессор изображений выполнен с возможностью принимать временные данные и данные местоположения, сформированные посредством модуля управления камерой, и формировать сообщение отслеживания транспортных средств, содержащее сведения распознанного номерного знака проезжающего транспортного средства и временные данные и данные местоположения. Процессор изображений выполнен с возможностью отправлять сообщение отслеживания транспортных средств третьей стороне.
Необязательно, детектор содержит множество направленных антенн, причем каждая направленная антенна направлена в предварительно определенном направлении, причем детектор выполнен с возможностью передавать в процессор изображений сообщение, указывающее то, какая направленная антенна обнаруживает создающий помехи сигнал, причем процессор изображений выполнен с возможностью идентифицировать позицию транспортного средства на основе того, какая из направленных антенн обнаруживает создающий помехи сигнал.
Необязательно, каждое предварительно определенное направление соответствует полосе движения дороги.
Необязательно, система дополнительно содержит детекторы и камеры во множестве дополнительных местоположений, выполненные с возможностью захватывать дополнительные изображения в каждом из дополнительных местоположений, в которых обнаруживается создающий помехи сигнал, и упомянутый процессор изображений выполнен с возможностью анализировать первое изображение и дополнительные изображения посредством идентификации транспортных средств, общих для первого изображения и, по меньшей мере, некоторых дополнительных изображений, чтобы идентифицировать проезжающее транспортное средство, испускающее создающий помехи сигнал.
Необязательно, система дополнительно содержит соответствующие модули управления камерой в каждом дополнительном местоположении, причем каждый модуль управления камерой выполнен с возможностью захватывать временные данные, ассоциированные со временем, в которое захватывается каждое дополнительное изображение, и захватывать данные местоположения, ассоциированные с каждым соответствующим дополнительным местоположением, в котором захватывается каждое дополнительное изображение.
Необязательно, детектор содержит антенну в первой позиции, соединенную с первым приемным устройством, и антенну во второй позиции, соединенную со вторым приемным устройством, и модуль анализатора разности фаз, причем упомянутый модуль анализатора разности фаз выполнен с возможностью собирать данные, соответствующие изменению разности фаз между первой фазой и второй фазой, причем первая фаза представляет собой фазу создающего помехи сигнала, принимаемого посредством первого приемного устройства, а вторая фаза представляет собой фазу создающего помехи сигнала, принимаемого посредством второго приемного устройства, и процессор изображений выполнен с возможностью оценивать позицию проезжающего транспортного средства в изображении из вывода модуля анализатора разности фаз.
Необязательно, анализатор разности фаз выполнен с возможностью согласовывать данные изменения фазы с моделью изменения фазы, причем упомянутая модель изменения фазы представляет собой модель изменения разности фаз между первой и второй фазой с использованием набора параметров, причем упомянутые параметры включают в себя скорость и путь транспортного средства; определять параметры модели, формировать, из параметров модели, оцененный путь и оцененную скорость проезжающего транспортного средства; передавать данные, соответствующие оцененному пути и оцененной скорости проезжающего транспортного средства, в процессор изображений, за счет этого предоставляя возможность процессору изображений оценивать позицию проезжающего транспортного средства в изображении.
Необязательно, предварительно заданная полоса частот представляет собой полосу частот, в которой передаются GNSS-сигналы.
Необязательно, первое местоположение представляет собой портальную раму, размещаемую на дороге.
В соответствии с третьим аспектом изобретения, предусмотрена компьютерная программа, содержащая машиночитаемые инструкции, которые при загрузке в компьютер осуществляют способ согласно первому аспекту изобретения.
В соответствии с четвертым аспектом изобретения, предусмотрен компьютерный программный продукт, содержащий компьютерную программу согласно третьему аспекту изобретения.
Различные дополнительные аспекты и признаки изобретения задаются в формуле изобретения.
Краткое описание чертежей
Далее описываются варианты осуществления настоящего изобретения только в качестве примера со ссылкой на прилагаемые чертежи, на которых аналогичные части содержат соответствующие ссылки с номерами, и на которых:
Фиг. 1 предоставляет принципиальную схему системы идентификации транспортных средств, размещаемой в соответствии с примером изобретения;
Фиг. 2 предоставляет принципиальную схему, подробнее иллюстрирующую компоненты системы, показанной на фиг. 1;
Фиг. 3 предоставляет принципиальную схему системы, соответствующей системе, показанной на фиг. 2, но выполненной с возможностью включать в себя несколько направленных антенн;
Фиг. 4 предоставляет принципиальную схему системы идентификации транспортных средств, размещаемой в соответствии с другим примером изобретения;
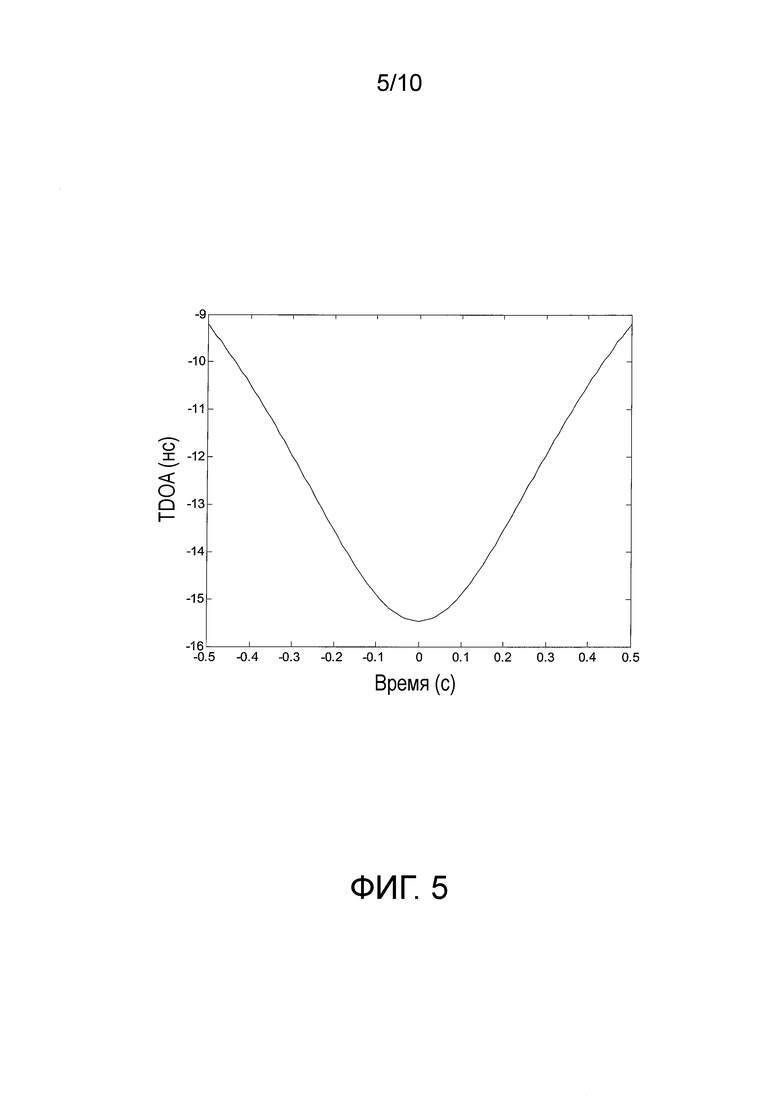
Фиг. 5 предоставляет график, иллюстрирующий моделирование типичных TDOA-значений, которые предположительно должны возникать в системе, показанной на фиг. 4;
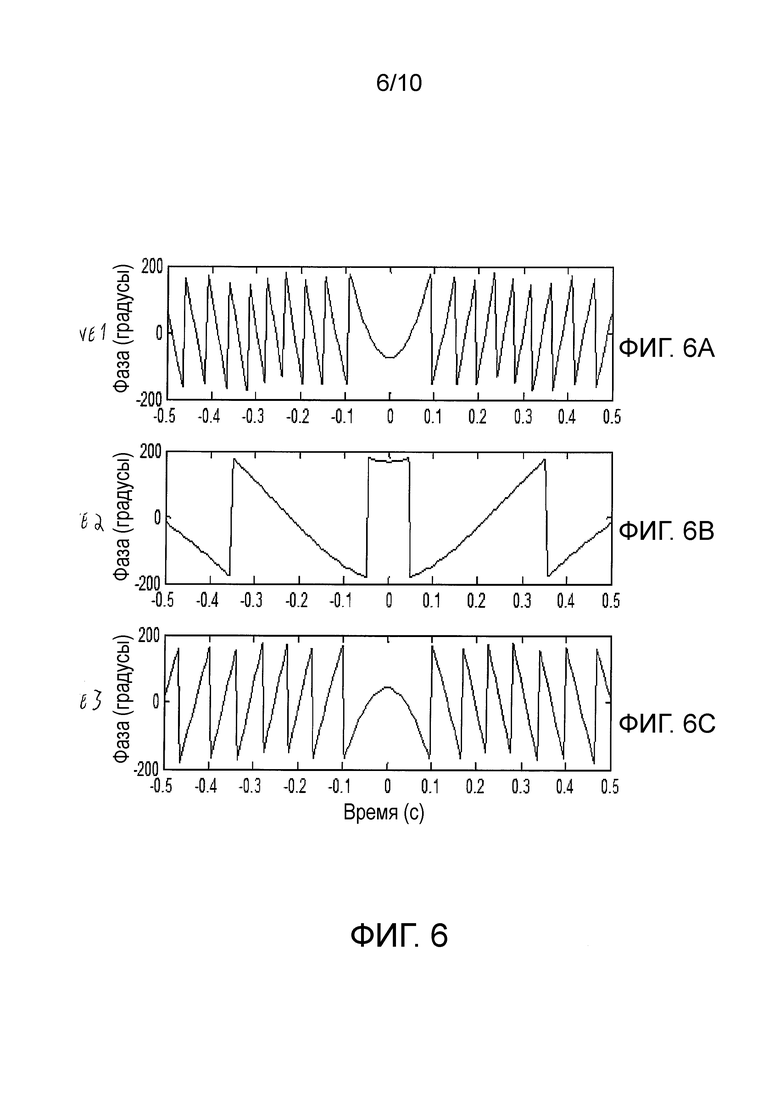
Фиг. 6a, 6b и 6c предоставляют графики, иллюстрирующие кривые моделирования транспортного средства, проезжающего между двумя приемными устройствами в различных полосах движения;
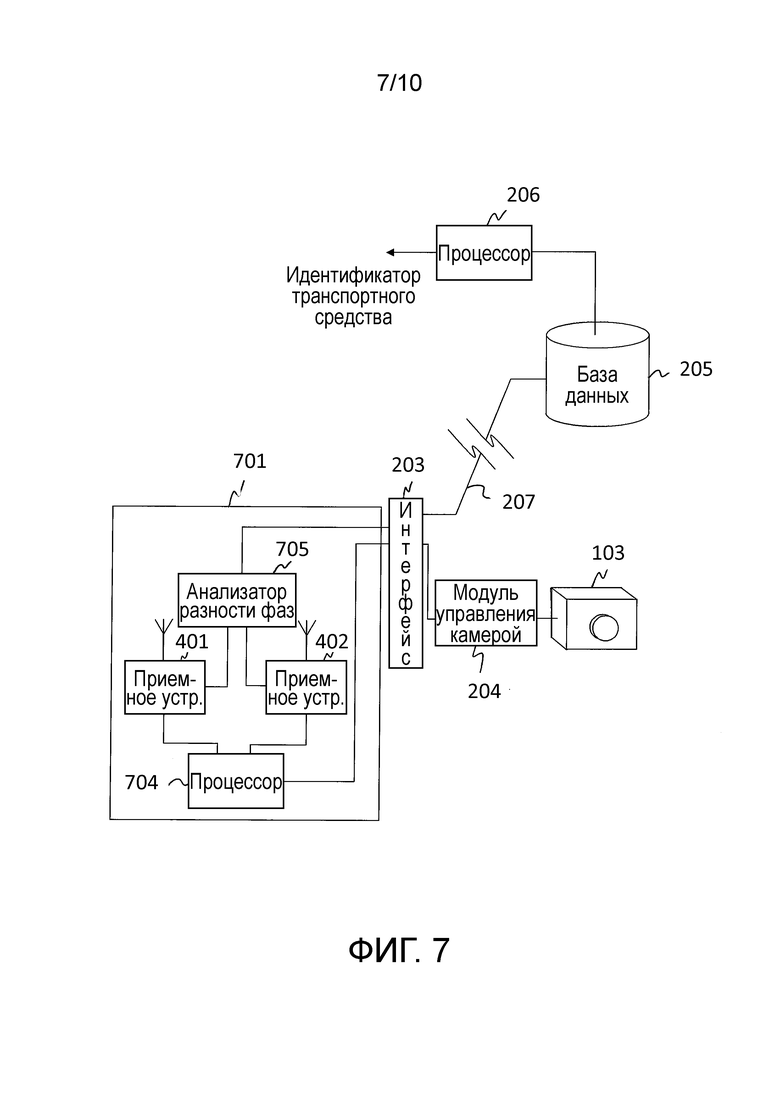
Фиг. 7 предоставляет принципиальную схему, подробнее иллюстрирующую компоненты системы, показанной на фиг. 4;
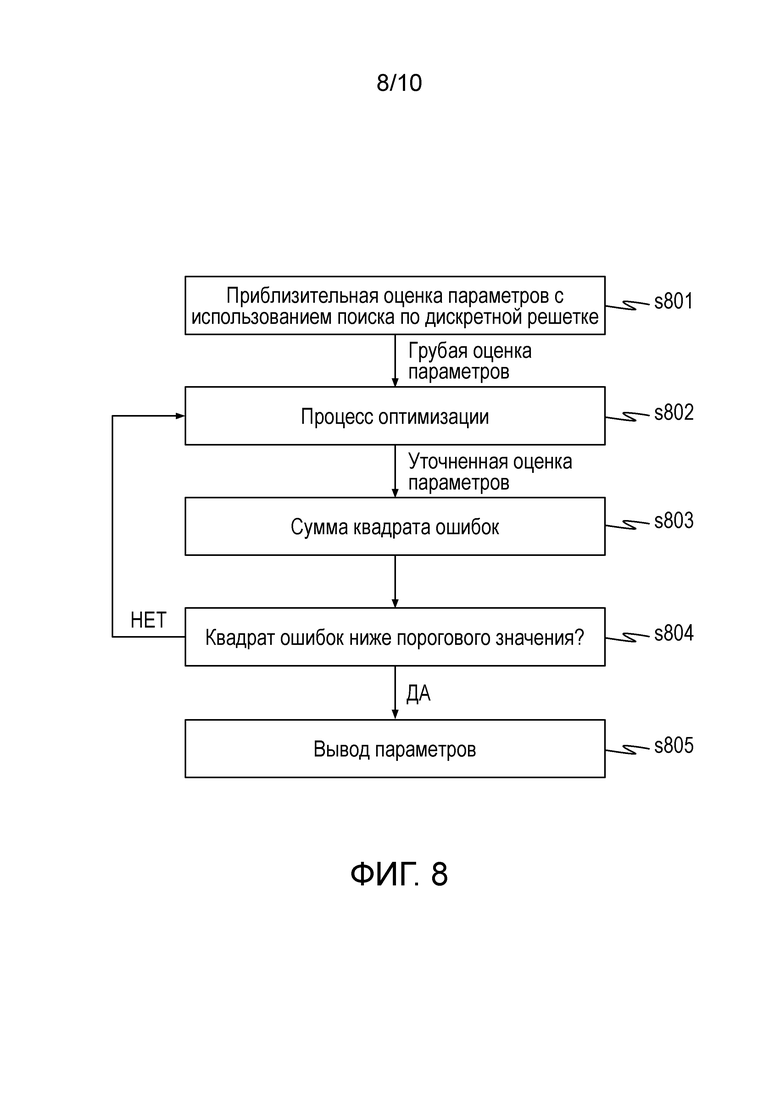
Фиг. 8 предоставляет блок-схему последовательности операций способа, иллюстрирующую пример алгоритма оценки параметра;
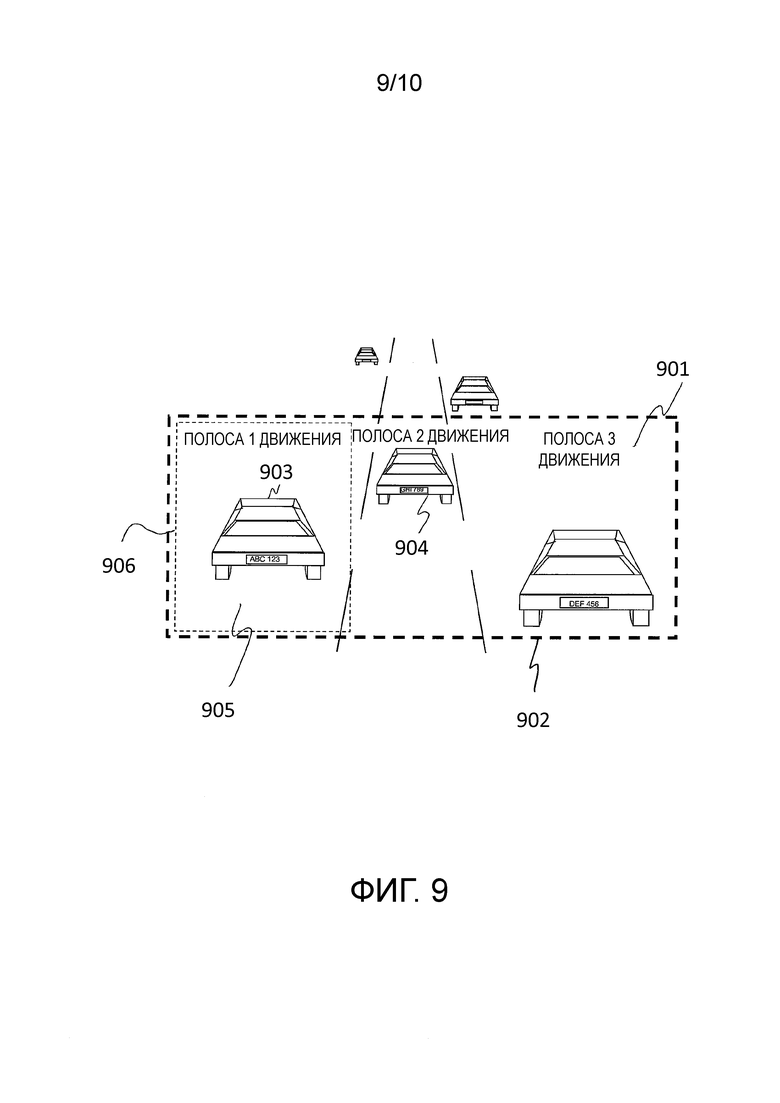
Фиг. 9 предоставляет принципиальную схему, иллюстрирующую изображение, снятое с помощью камеры, размещаемой на портальной раме в соответствии с примерами изобретения, и
Фиг. 10 предоставляет блок-схему последовательности операций способа в соответствии с примером изобретения.
Подробное описание изобретения
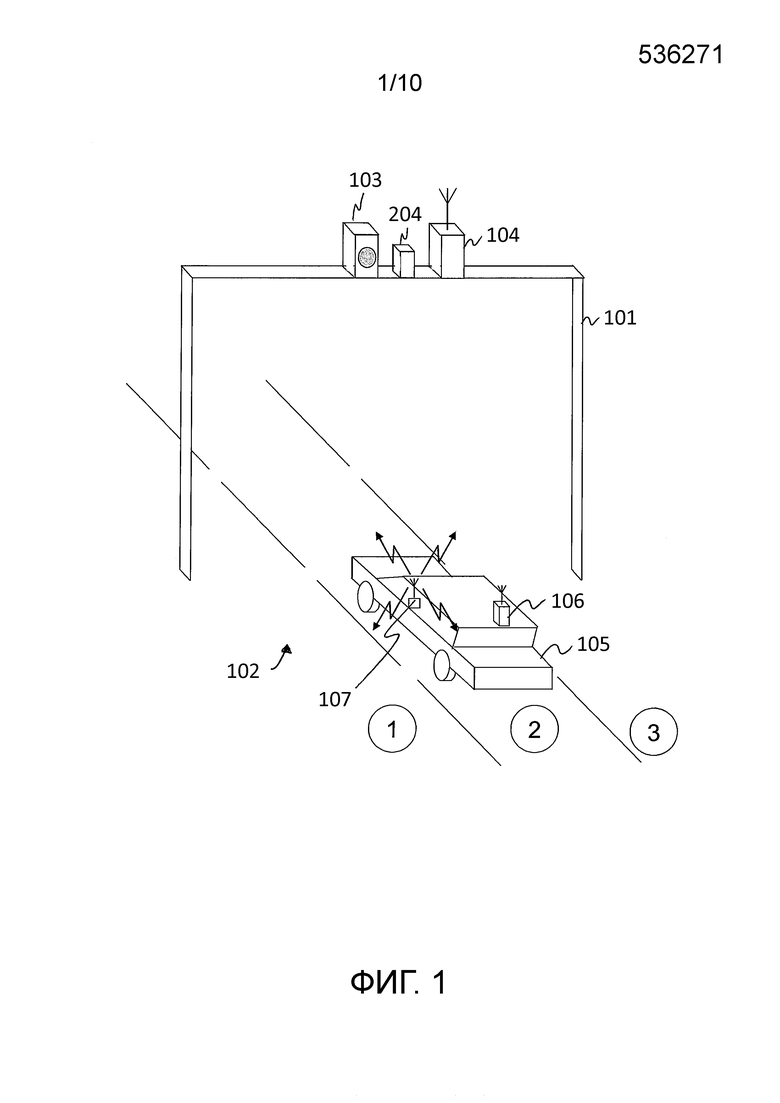
Фиг. 1 предоставляет принципиальную схему системы идентификации транспортных средств, размещаемой в соответствии с примером изобретения. Система выполнена с возможностью идентифицировать транспортные средства, которые могут содержать генераторы помех, испускающие создающие помехи сигналы.
Портальная рама 101 позиционируется над дорогой 102. Типично на многих автомобильных шоссе, дорога 102 включает в себя несколько полос движения. В примере, показанном на фиг. 1, дорога 102 содержит три полосы движения, помеченные как 1, 2 и 3, соответственно. Дорога 102 пропускает трафик в одном направлении и типично должна дополняться смежной дорогой (не показана), пропускающей трафик в противоположном направлении.
Портальная рама содержит камеру 103 и детектор 104. Камера 103 выполнена с возможностью захватывать изображения транспортных средств, проезжающих под портальной рамой 101. Детектор 104 выполнен с возможностью обнаруживать испускание сигналов в пределах (т.е. в или для) предварительно заданной полосы частот. При обнаружении сигнала, испускаемого в предварительно заданной полосе частот, детектор выполнен с возможностью отправлять инициирующий сигнал в модуль 204 управления, который управляет камерой 103, чтобы захватывать изображение дороги под портальной рамой 104.
Типично, камера 103 направлена с возможностью снимать изображения транспортных средств по мере того, как они отъезжают от портальной рамы 101. Модуль 204 управления и камера калибруются таким образом, что снимается изображение конкретной области дороги 102 за пределами портальной рамы 101. Типично, эта область дороги 102 представляет собой область, в которой транспортное средство, движущееся в пределах нормального диапазона скорости, предположительно должно быть в течение предварительно определенного времени после того, как создающий помехи сигнал обнаружен посредством детектора 104.
Фиг. 1 показывает транспортное средство 105, движущееся по дороге 102 к портальной раме 101. Транспортное средство 105 включает в себя отслеживающее устройство 106 на основе GNSS, включающее в себя приемное GNSS-устройство и сотовое сетевое приемо-передающее устройство, как описано выше. Транспортное средство 105 также содержит генератор 107 помех, выполненный с возможностью испускать создающий помехи сигнал в полосе частот, в которой спутниковые GNSS-сигналы передаются в широковещательном режиме ("в полосе GNSS-частот"). Как описано выше, испускание создающего помехи сигнала посредством генератора 107 помех является таким, что оно предотвращает формирование посредством отслеживающего устройства 106 точных данных местоположения. Угонщик может красть транспортное средство 105 и вставлять генератор 107 помех в транспортное средство 105, чтобы предотвращать его удаленное отслеживание.
Детектор 104 выполнен с возможностью обнаруживать сигналы, испускаемые в полосе GNSS-частот. По мере того, как транспортное средство 105 приближается, детектор 104 обнаруживает испускание сигнала помех из генератора 107 помех и отправляет инициирующий сигнал в камеру 103 через модуль 204 управления. Камера 103 затем захватывает изображение дороги 102 под портальной рамой 101. Изображение должно включать в себя транспортное средство 105. Как подробнее описано ниже, захваченное изображение может обрабатываться, чтобы идентифицировать транспортное средство 105.
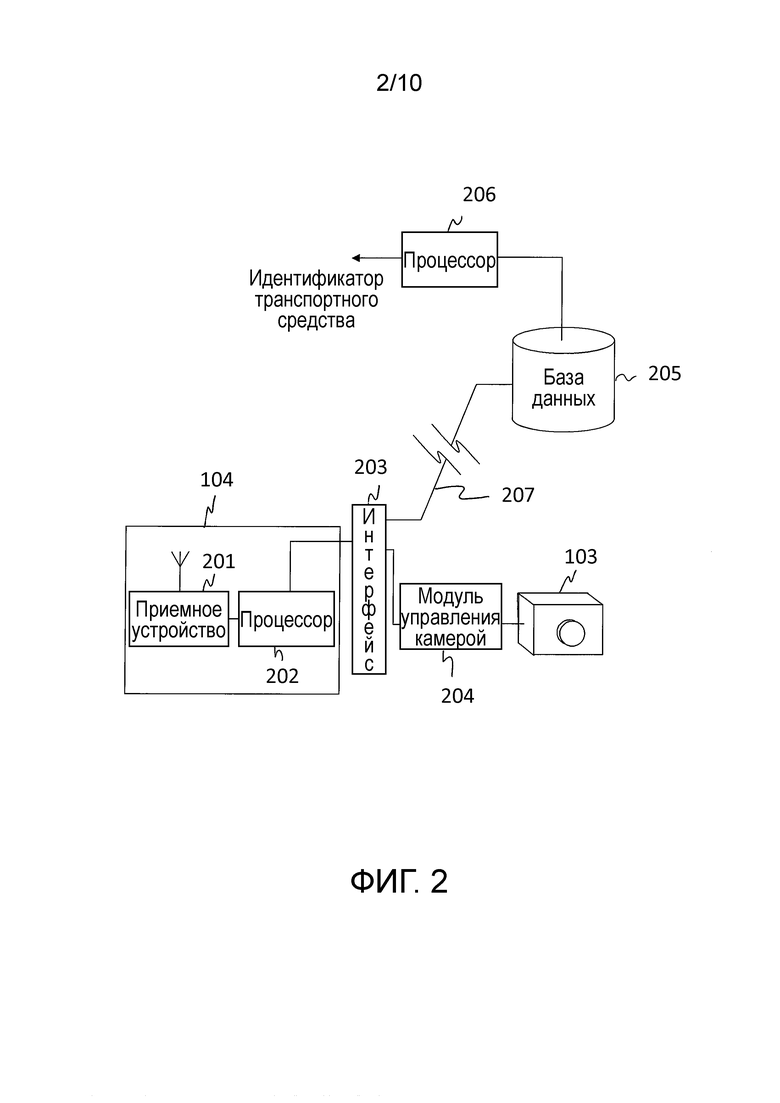
Фиг. 2 предоставляет принципиальную схему, подробнее иллюстрирующую компоненты системы, показанной на фиг. 1. Детектор 104 включает в себя приемное устройство 201, настроенное для того, чтобы принимать сигналы, испускаемые полосы GNSS-частот и процессора 202. Процессор 202 выполнен с возможностью анализировать вывод приемного устройства 201 и определять то, указывает или нет вывод то, что создающий помехи сигнал обнаружен. Процессор 202 соединяется с модулем 204 управления камерой через интерфейс 203. Модуль 204 управления камерой соединяется с камерой 103. Если процессор 202 определяет то, что создающий помехи сигнал обнаружен, инициирующий сигнал отправляется через интерфейс 203 в модуль 204 управления камерой. Модуль 204 управления камерой затем управляет камерой 103, чтобы захватывать изображение. Данные изображений затем отправляются из камеры 103 через модуль 204 управления камерой и интерфейс 203 в базу 205 данных изображений. Типично база 205 данных изображений находится в местоположении, отличном от местоположения портальной рамы 101, и, следовательно, данные изображений должны отправляться через подходящую линию 207 связи.
Как упомянуто выше, процессор 202 выполнен с возможностью анализировать вывод приемного устройства 201 и определять то, указывает или нет вывод то, что создающий помехи сигнал обнаружен. Это может выполняться с использованием любой подходящей технологии обработки.
Например, в первой технологии обработки, способ спектрального анализа (например, FFT на основе кодирования со взвешиванием) многократно применяется с обеспечением непрерывной последовательности спектров мощности. Посредством обработки результирующих последовательных спектров мощности (с использованием усреднения или другой сглаживающей фильтрации), нормальный (фоновый) уровень мощности оценивается в полосе частот. По мере того, как формируется каждый новый спектр мощности, его уровень на каждой частоте в полосе частот сравнивается с оцененным фоновым уровнем. Если он в достаточной степени превышает фоновый уровень на одной или более частот, и присутствие создающего помехи сигнала логически выводится, процессор формирует инициирующий сигнал.
Во второй технологии обработки, обработка, аналогичная обработке, описанной в предыдущем абзаце, применяется последовательно к различным подполосам частот поочередно, т.е. подход на основе "сканирования". Поскольку она уменьшает "мгновенную полосу пропускания", которая принимается и обрабатывается, она упрощает и/или сокращает затраты на конструкцию приемного устройства и/или конструкцию процессора. Тем не менее, это означает то, что только часть спектра отслеживается в каждый момент времени.
Технологии сканирования, используемые в обоих этих примерах, известны в области техники электронного наблюдения.
Возвращаясь к фиг. 2, типично модуль 204 управления камерой должен добавлять временные данные и данные местоположения портальной рамы в данные изображений, отправленные в базу 205 данных изображений. Временные данные указывают время, в которое захвачено изображение, и данные местоположения портальной рамы указывают местоположение портальной рамы 101. В других примерах, если местоположение портальной рамы 101 уже известно, то местоположение может извлекаться посредством простого предоставления идентификационных данных портальной рамы, которые идентифицируют портальную раму.
База 205 данных изображений соединяется с процессором 206 изображений, выполненным с возможностью осуществлять обработку изображений для данных изображений, принимаемых через линию 207 связи. В некоторых примерах, обработка изображений, выполняемая посредством процессора 206 изображений, включает в себя процесс распознавания транспортного средства, который пытается идентифицировать транспортное средство из данных изображений на основе некоторого аспекта (т.е. признака) транспортного средства, захваченного в изображении.
В большинстве юрисдикций, транспортные средства должны быть оснащены номерным знаком, содержащим различные символы (например, числа и буквы), которые дают возможность уникальной идентификации транспортного средства (обычно называемым "регистрационным знаком", "государственным регистрационным знаком", "ярлыком", "государственным регистрационным номером" и т.д.). Номерной знак типично ассоциирован с дополнительной информацией, такой как автопроизводитель, модель, год выпуска, а также паспортные данные и адрес владельца транспортного средства.
В некоторых примерах, процессор 206 изображений выполнен с возможностью осуществлять процесс распознавания номерных знаков, который пытается определять идентификатор транспортного средства посредством распознавания чисел и символов, отображаемых на номерном знаке транспортных средств, захваченных в изображении. Технологии для выполнения этого процесса известны в данной области техники.
Когда процессор 206 изображений выполняет процесс распознавания номерных знаков и распознает номерной знак транспортного средства в изображении (например, определяет строку символов, показанных на номерном знаке), он может быть выполнен с возможностью отправлять информацию, соответствующую символам номерного знака (сведения распознанного номерного знака), третьей стороне, такой как, например, правоохранительные органы. Эта информация также может включать в себя временные данные и данные местоположения портальной рамы, поясненные ранее. Таким образом, можно определять идентификатор и местоположение транспортного средства, содержащего генератор помех, в конкретное время. Также можно определять направление движения в момент времени, когда захвачено изображение, на основе направления движения для трафика, движущегося под портальной рамой. В качестве примера, информация (сообщение отслеживания транспортных средств), передаваемая третьей стороне из процессора 206, может иметь следующую форму:
Транспортное средство, содержащее номерной знак XYZ 123, снятое в 13:00 в точке A, на шоссе B, едущее на север.
При приеме этой информации, может выполняться поиск в базе данных идентификаторов транспортных средств, содержащей сведения транспортных средств, ассоциированные со сведениями номерных знаков, чтобы определять идентификатор проезжающего транспортного средства на основе сведений распознанного номерного знака и более подробную информацию, такую как имя и адрес владельца.
Как известно, множество сетей автомобильных дорог включают в себя несколько портальных рам, разнесенных с интервалами по их длине. Если компоновка портальной рамы, показанная на фиг. 1, повторяется на некоторых или всех этих портальных рамах, можно оценивать скорость и курс транспортных средств, подозреваемых в наличии генераторов помех. При использовании современных интерфейсов связи и технологий обработки изображений, возможно то, что компоновка, показанная на фиг. 2, должна обеспечивать возможность осуществления вышеозначенного в реальном времени или практически в реальном времени. Это может давать возможность более простого перехвата таких транспортных средств.
Сравнение последовательных изображений
Как показано на фиг. 1, большинство сетей автомобильных дорог содержат дороги, которые включают в себя несколько полос движения в обоих направлениях. В часы пик, вероятно, что более одного транспортное средство должно проезжать под портальной рамой в конкретное время. Может быть затруднительным точно идентифицировать транспортное средство, содержащее генератор помех, если изображение содержит несколько транспортных средств.
Тем не менее, если транспортное средство, содержащее генератор помех, испускающее создающий помехи сигнал, движется по сети автомобильных дорог, содержащей определенное число портальных рам, как показано на фиг. 1 и 2, изображения захватываются в последовательных портальных рамах в направлении движения транспортного средства. Следовательно, в некоторых примерах, процессор 206 изображений выполнен с возможностью сравнивать изображения, захваченные из определенного числа смежных портальных рам, чтобы идентифицировать транспортные средства, которые являются общими для каждого изображения. Это может осуществляться посредством процессора 206 изображений, выполняющего процесс распознавания номерных знаков на каждом транспортном средстве в каждом изображении и затем идентифицирующего номерные знаки, которые являются общими для каждого изображения. Если одно транспортное средство является общим для нескольких последовательно захваченных изображений, то имеется высокая вероятность того, что это отдельное транспортное средство представляет собой транспортное средство, содержащее генератор помех. Дополнительная информация также может извлекаться таким способом, например, средняя скорость и направление рассматриваемого транспортного средства на основе анализа временных данных и данных местоположения, ассоциированных со всеми изображениями, определенными как содержащие изображение транспортного средства, подозреваемого в наличии генератора помех.
Направленные антенны
В одном примере, чтобы дополнительно различать между несколькими транспортными средствами, проезжающими под портальной рамой в любой момент, могут использоваться направленные антенны. Каждая портальная рама может быть оснащена направленной антенной, размещаемой с возможностью обнаруживать создающие помехи сигналы из транспортных средств, движущихся в конкретной полосе движения дороги. Для высокоскоростных дорог, к примеру, многополосных шоссе, дорога типично является длинной и прямой относительно позиции антенны на портальной раме. Следовательно, направленные антенны могут быть выполнены с возможностью легко обнаруживать создающие помехи сигналы, испускаемые из транспортных средств в одной конкретной полосе движения дороги.
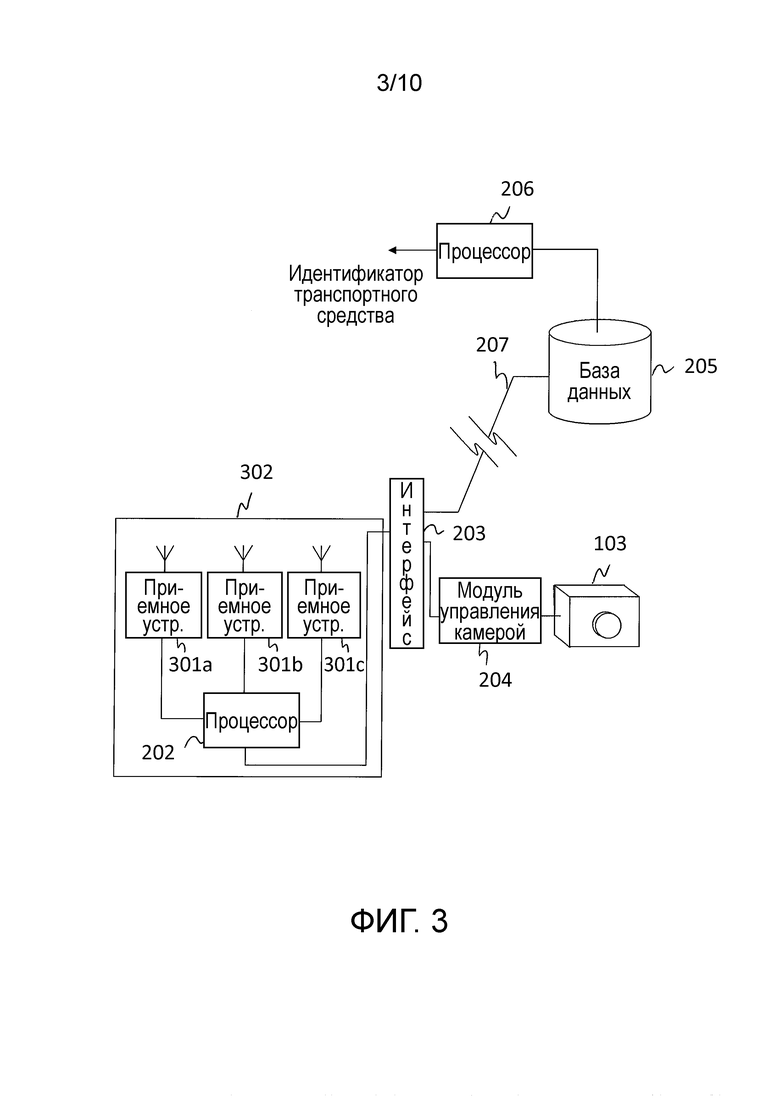
Фиг. 3 предоставляет принципиальную схему системы, соответствующей системе, показанной на фиг. 2, но выполненной с возможностью включать в себя несколько направленных антенн, причем каждая направленная антенна соответствует одной полосе движения трехполосной дороги.
Модифицированный модуль 302 детектора включает в себя три приемных устройства 301a, 301b, 301c. Каждое приемное устройство 301a, 301b, 301c соединяется с направленной антенной, которая выполнена с возможностью обнаруживать сигналы, испускаемые из транспортных средств, движущихся по конкретной полосе движения дороги. Как указано выше, каждое приемное устройство 301a, 301b, 301c настроено с возможностью принимать сигналы, испускаемые в полосе GNSS-частот. Процессор 202 выполнен с возможностью принимать вывод каждого приемного устройства 301a, 301b, 301c и определять то, когда приемные устройства 301a, 301b, 301c обнаруживают создающий помехи сигнал, испускаемый в полосе GNSS-частот. Это осуществляется с использованием любой подходящей технологии, например, в соответствии с первой или второй технологиями обработки, описанными выше. Когда процессор 202 определяет то, что одна из направленных антенн обнаруживает создающий помехи сигнал, процессор 202 отправляет инициирующий сигнал в модуль 204 управления камерой через интерфейс 203, как описано выше. Тем не менее, процессор 202 также выполнен с возможностью включать в инициирующий сигнал индикатор в отношении того, какая направленная антенна обнаруживает создающий помехи сигнал. Модуль 204 управления камерой управляет камерой 103 таким образом, чтобы захватывать изображение, как описано выше, тем не менее, когда данные изображений отправляются в базу 205 данных изображений, включается дополнительная информация, указывающая то, на какой полосе движения направленная антенна, которая обнаруживает создающий помехи сигнал, выполнена с возможностью фокусироваться. Процессор 206 изображений затем может анализировать изображение для транспортных средств в конкретной полосе движения. Этот процесс подробнее описывается со ссылкой на фиг. 9.
В дополнительных примерах, портальная рама может быть оснащена камерой, направленной на каждую полосу движения. Таким образом, когда направленная антенна, направленная на конкретную полосу движения, обнаруживает создающий помехи сигнал, инициирующий сигнал отправляется через модуль управления в камеру, охватывающую эту полосу движения, и захватывается изображение, и соответствующие данные изображений отправляются в базу 205 данных изображений.
Технология измерения фазы
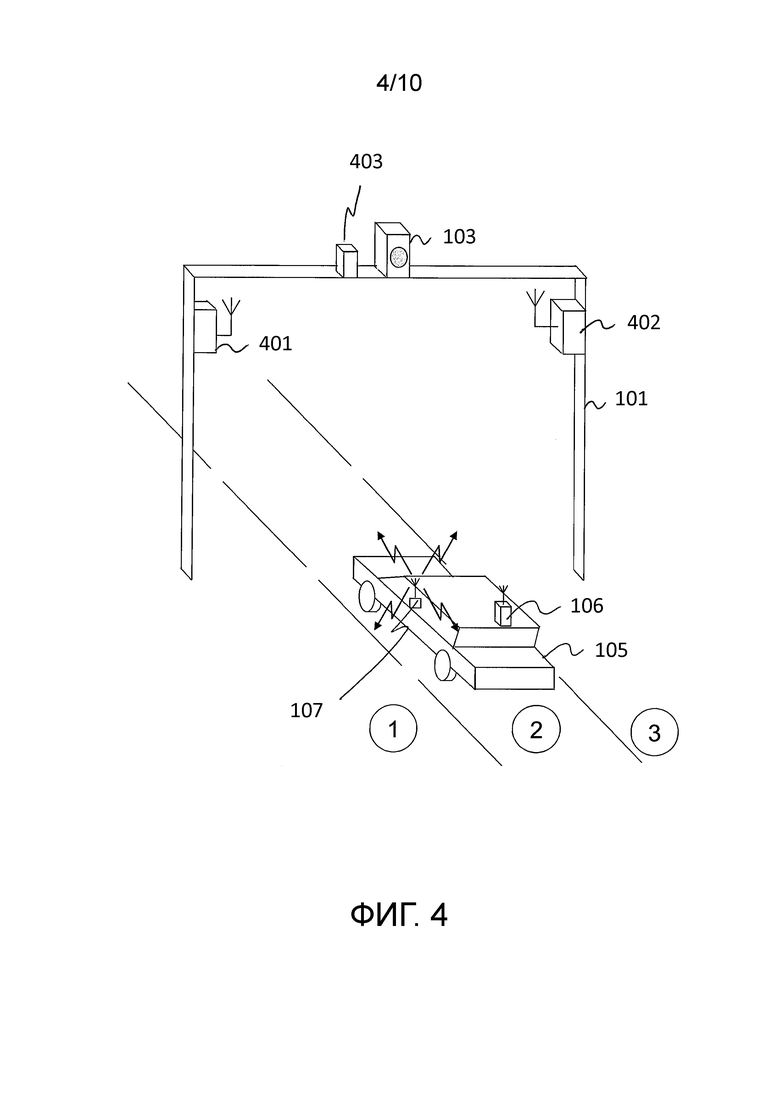
Фиг. 4 предоставляет принципиальную схему системы идентификации транспортных средств, размещаемой в соответствии с другим примером изобретения.
В соответствии с системой, описанной со ссылкой на фиг. 1, система включает в себя портальную раму 101 с камерой 103. Система дополнительно включает в себя детекторную матрицу, содержащую первую антенну и приемное устройство 401 и вторую антенну и приемное устройство 402. Первая и вторая антенны 401, 402 позиционируются на одной из сторон портальной рамы 101, например, первая антенна 401 позиционируется на левой стороне портальной рамы, а вторая антенна позиционируется на правой стороне портальной рамы. Первое и второе приемные устройства 401, 402 соединяются с камерой 103 через модуль 403 управления.
Первое и второе приемные устройства 401, 402 выполнены с возможностью обнаруживать испускание создающих помехи сигналов, и в ответ, модуль 403 управления выполнен с возможностью управлять камерой 103, чтобы захватывать изображение транспортных средств, проезжающих под портальной рамой 101. Тем не менее, помимо этого, как подробнее описано ниже, испускаемые сигналы, обнаруженные посредством первого и второго приемных устройств 401, 402, обрабатываются, чтобы оценивать позицию транспортного средства, проезжающего под портальной рамой 101, которое инициировало захват изображения. Это выполняется на основе изменения разности между фазой создающего помехи сигнала, принимаемого в первом детекторе 401, и фазой создающего помехи сигнала, принимаемого во втором детекторе 402. Как подробнее пояснено ниже, процессор 206 изображений выполнен с возможностью оценивать позицию транспортного средства в изображении из вывода модуля анализатора разности фаз.
В электронном наблюдении, известны технологии определения местоположений передающих устройств на основе сравнения принимаемого сигнала в пространственно разнесенных приемных устройствах. Тем не менее, как изложено ниже, они, в общем, не являются подходящими для использования в вариантах применения, предусматривающих относительно низкую скорость и небольшие расстояния, к примеру, в вариантах осуществления, показанных на фиг. 1 и 4.
Например, в одной технологии, вычисляется истекшее время (т.е. временная задержка) интересующего сигнала для того, чтобы достигать различных приемных устройств. Временная задержка между поступлением интересующего сигнала в первом приемном устройстве и поступлением интересующего сигнала в одном или более других приемных устройств непрерывно оценивается. Это измерение известно, как разность времен поступления сигналов (TDOA).
В любой конкретный момент времени, TDOA-значение зависит от позиции передающего устройства относительно позиции приемных устройств. Если относительные позиции приемных устройств известны, TDOA между различными приемными устройствами может использоваться для того, чтобы оценивать позицию передающего устройства относительно приемных устройств.
В общем, невозможно проводить однозначное измерение позиции передающего устройства с использованием TDOA-измерения с помощью только двух приемных устройств, поскольку, типично, идентичное TDOA-измерение является результатом позиций передающих устройств в любом месте вдоль гиперболической кривой. В практических системах привязки позиции, которые используют TDOA, следовательно, необходимо использовать три или более приемных устройств. Кроме того, точность привязки позиции, которая может достигаться посредством TDOA-технологий, является слишком плохой для того, чтобы быть полезной в этой заявке.
В примере другой технологии, вычисляется сдвиг частоты между интересующим сигналом, принимаемым в различных приемных устройствах. Это измерение известно, как разность частот поступления сигналов (FDOA).
В любой конкретный момент времени, FDOA зависит от темпов изменения расстояний между передающим устройством и приемными устройствами. Следовательно, эта технология основывается на относительном движении между передающим устройством и приемными устройствами и, в общем, ограничивается вариантами применения, в которых приемные устройства находятся на подвижной платформе, такой как самолет, поскольку собственное движение самолета известно. Обычно, эта технология не используется в вариантах применения с использованием статических приемных устройств и подвижного передающего устройства, поскольку движение передающего устройства типично является неизвестным.
Обычно, технологии привязки позиции на основе FDOA используются в вариантах применения, предусматривающих самолеты и другие летательные аппараты. Следует принимать во внимание, что относительные скорости между передающим устройством и приемными устройствами в таких вариантах применения намного превышают относительные скорости, с большой вероятностью наблюдаемые в системах, проиллюстрированных на фиг. 1 и 4.
Как результат, значения TDOA и FDOA между детекторами 401, 402 для создающих помехи сигналов, испускаемых из бортовых передающих устройств, проезжающих под портальной рамой 101, должны быть очень небольшими. В общем, они должны быть слишком небольшими для того, чтобы обеспечивать возможность вычисления полезной информации относительно позиции и движения передающего устройства.
Это проиллюстрировано на фиг. 5.
Фиг. 5 предоставляет график, иллюстрирующий моделирование типичных TDOA-значений, которые предположительно должны возникать в системе, показанной на фиг. 4.
График показывает TDOA между первым и вторым детекторами 401, 402 при условии, что детекторы отстоят друг от друга на 10 м на портальной раме 101, и что первый и второй детекторы 401, 402 располагаются на 5 м по вертикали выше передающего устройства генератора помех в транспортном средстве, движущемся по дороге, проходящей под портальной рамой. Моделирование дополнительно допускает то, что транспортное средство находится на земле и движется при 20 м/с (приблизительно 40 миль в час). Моделирование допускает то, что транспортное средство находится в полосе 1 движения.
График показывает, что TDOA (т.е. разность времени поступления создающего помехи сигнала в первом детекторе 401 и времени поступления создающего помехи сигнала во втором детекторе 402) варьируется в максимальном диапазоне приблизительно в 6 нс.
Это небольшое TDOA-варьирование (6 нс) означает, что традиционные способы измерения разности времен являются неосуществимыми. Традиционные способы типично используют тот факт, что обычно модулируется создающий помехи сигнал. Полоса пропускания модуляции интересующих сигналов (т.е. GNSS-сигналов) находится где-то между 1 кГц и 40 МГц, и даже в самой преимущественной полосе пропускания, 40 МГц, точность, с которой разность времен может измеряться таким способом, составляет только приблизительно 10-20 нс. По мере того, как полоса пропускания уменьшается, эта точность еще более ухудшается, пропорционально.
Следовательно, традиционно, технологии на основе определения разностей поступления создающего помехи сигнала в различных передающих устройствах не подходят для использования в системах обнаружения помех, как описано выше.
Тем не менее, в отличие от TDOA-технологий (которые формируют значения, которые являются слишком небольшими для того, чтобы быть полезными) и FDOA-технологий (которые требуют знания движения передающего устройства), в соответствии с некоторыми примерами настоящего изобретения, следует признавать, что сравнение разности между фазой создающего помехи сигнала, принимаемого в первом детекторе, и фазой создающего помехи сигнала, принимаемого во втором детекторе, предоставляет полезную информацию относительно позиции создающего помехи передающего устройства, несмотря на низкие скорости и расстояния, возникающие в системе, показанной на фиг. 4.
Это проиллюстрировано на фиг. 6a, 6b и 6c.
Фиг. 6a, 6b и 6c предоставляют графики моделированного изменения разности между фазой создающего помехи сигнала, принимаемого в первом детекторе, и фазой создающего помехи сигнала, принимаемого во втором детекторе (упоминаемого с этого момента и далее в качестве "изменения разности фаз") по мере того, как транспортное средство движется к месту под портальной рамой, которое предположительно должно возникать в системе, показанной на фиг. 4. Эти моделирования основаны на модели изменения фазы, которая представляет собой модель изменения разности фаз между сигналом, принимаемым в двух детекторах, с использованием набора предварительно заданных параметров.
Параметры включают в себя скорость и путь транспортного средства и данные разнесения, ассоциированные с позицией врачей друг относительно друга и относительно дороги, по которой движется транспортное средство. Моделирования формируются с использованием этих параметров и известной информации относительно распространения электромагнитных излучений.
Моделирования, показанные на фиг. 6a, 6b и 6c, основаны на передающем устройстве, движущемся на фиксированной скорости в направлении к, под и затем в направлении от двух детекторов в фиксированных позициях с разнесением друг от друга и в фиксированной позиции над дорогой.
Фиг. 6a показывает первую кривую моделирования передающего устройства, проезжающего под портальной рамой 101 в полосе 1 движения; фиг. 6b показывает вторую кривую моделирования передающего устройства, проезжающего под портальной рамой 101 в полосе 2 движения; и фиг. 6c показывает вторую кривую моделирования передающего устройства, проезжающего под портальной рамой 101 в полосе 3 движения.
Другие используемые параметры являются идентичными для каждого моделирования, т.е. разнесение детекторов на портальной раме; высота по вертикали детекторов выше дороги; и скорость транспортного средства, содержащего передающее устройство.
Как следует из графиков на фиг. 6a, 6b и 6c, по мере того, как передающее устройство приближается, проезжает и отъезжает от портальной рамы, способ, которым варьируется TDOA создающего помехи сигнала, представляет собой функцию пути (например, полоса 1 движения, полоса 2 движения или полоса 3 движения), по которому транспортное средство едет под портальной рамой. Это варьирование TDOA проявляется в изменяющемся значении для разности фаз создающего помехи сигнала, обнаруженного в первом детекторе, и создающего помехи сигнала, обнаруженного во втором детекторе.
Следует признавать, что поскольку изменение разности фаз является характеристикой того, по какому пути движется транспортное средство, содержащее передающее устройство (как явно показано в моделированиях, проиллюстрированных на фиг. 6a, 6b и 6c), сбор и анализ данных изменения разности фаз предоставляет преимущественное средство, за счет которого можно оценивать позицию транспортного средства по мере того, как оно проезжает под портальной рамой, в силу этого упрощая точную идентификацию транспортного средства, содержащего создающее помехи передающее устройство, из захваченных изображений транспортных средств, проезжающих под портальной рамой. Кроме того, в некоторых примерах, дополнительная информация может извлекаться из изменения разности фаз, такая как направление движения и скорость транспортного средства.
Как пояснено ниже, нелинейный процесс оптимизации может использоваться для того, чтобы согласовывать собранные данные изменения разности фаз с моделированными данными разности фаз (примерно проиллюстрирован посредством графиков, показанных на фиг. 6a, 6b и 6c). Этот процесс должен определять то, какие значения параметров моделирования (включающих в себя путь транспортного средства) лучше всего согласуются с наблюдаемыми данными и, следовательно, дают возможность оценки позиции транспортного средства.
Дополнительно, если путь, по которому следует транспортное средство, большей частью является непрямым на короткие расстояния (10-ки метров движения), дополнительные параметры могут быть включены для того, чтобы описывать эту кривизну.
Фиг. 7 предоставляет принципиальную схему, подробнее иллюстрирующую компоненты системы, показанной на фиг. 4, и описывающую пример изменения разности фаз, используемого для того, чтобы вычислять информацию относительно позиции транспортного средства, когда изображение транспортного средства захватывается.
Компоненты системы, показанной на фиг. 7, соответствуют компонентам системы, показанной на фиг. 2, за исключением того, что предоставляется модифицированная детекторная матрица 701, которая помимо обнаружения испускания создающего помехи сигнала, также выполнена с возможностью оценивать позицию транспортного средства, содержащего передающее устройство, испускающее создающий помехи сигнал, по мере того как оно проезжает под портальной рамой.
Детекторная матрица 701 содержит первую и вторую антенны и приемные устройства 401, 402, соединенные с процессором 704. Процессор 704 выполнен с возможностью анализировать вывод приемных устройств 401, 402 и определять то, указывает или нет вывод то, что создающий помехи сигнал обнаружен. Это может выполняться идентично вышеописанному со ссылкой на фиг. 2.
Детекторная матрица 701 дополнительно содержит анализатор 705 разности фаз. Анализатор 705 разности фаз представляет собой процессор, выполненный с возможностью отслеживать приемные устройства 401, 402, чтобы определять разность между фазой создающего помехи сигнала, принимаемого из первой антенны 401, и фаза создающего помехи сигнала, принимаемого во второй антенне 402 по мере того, как транспортное средство проезжает под портальной рамой (т.е. собирать данные изменения разности фаз). Следует понимать, что данные изменения разности фаз типично содержат множество значений разности фаз, собранных в течение предварительно заданного периода времени.
В анализатор 705 разности фаз предварительно загружаются данные модели изменения фазы, которые дают возможность вычисления данных изменения разности фаз (к примеру, графики, показанные на фиг. 6a, 6b и 6c) для различных параметров (например, пути и скорости транспортного средства.) Модель изменения фазы принимает во внимание различные параметры реального мира, к примеру, тот факт, что первый и второй детекторы являются стационарными относительно друг друга и занимают фиксированную позицию в пространстве над дорогой (и, следовательно, передающим устройством). Другие допущения могут обоснованно предлагаться, например, то, что транспортное средство движется на уровне земли.
Анализатор 705 разности фаз выполняет нелинейную технологию оптимизации, чтобы идентифицировать моделированный набор данных разности фаз, которая приводит к данным разности фаз, которые лучше всего согласуются с наблюдаемыми данными разности фаз. Параметры моделированного набора данных разности фаз (например, скорость и путь транспортного средства) затем могут оцениваться, выводиться и использоваться для того, чтобы оценивать позицию транспортного средства.
После события обнаружения (т.е. обнаружения создающего помехи сигнала), детектор разности фаз выполнен с возможностью осуществлять алгоритм оценки параметра для собранных данных изменения разности фаз. Пример такого алгоритма схематично иллюстрируется на фиг. 8.
На этапе s801, приблизительное сопоставление параметров выполняется с использованием, например, технологии на основе поиска по дискретной решетке. Оно сравнивает оцененные данные изменения разности фаз, сформированные из предварительно загруженной модели изменения фазы, с наблюдаемыми данными изменения разности фаз. Приблизительная оценка моделируемых параметров перемещения транспортного средства (например, пути и скорости транспортного средства) затем формируется.
На этапе s802, используется процесс оптимизации, за счет которого приблизительная оценка параметров уточняется с целью формирования оцененных параметров, которые формируют оцененные данные изменения разности фаз ближе к параметрам наблюдаемых данных изменения фазы.
На этапе s803, сумма квадрата ошибок вычисляется между наблюдаемыми данными изменения разности фаз и оцененными данными изменения разности фаз, сформированными на s802. На s804, сумма квадратических ошибок тестируется, чтобы определять то, она выше или ниже порогового уровня. Если она не ниже порогового уровня, алгоритм возвращается к этапу s802, и оцененные параметры уточняются снова.
Когда квадрат ошибок, протестированных на этапе S804, опускается ниже требуемого порогового значения, выводятся параметры, указывающие, например, скорость и путь транспортного средства. Следует понимать, что временная информация камеры известна (т.е. момент времени, в который захватывается изображение), эта информация затем может быть коррелирована с оцененными параметрами, чтобы вычислять позицию транспортного средства в захваченном изображении.
Анализатор разности фаз затем выполнен с возможностью идентифицировать, выводить сообщение позиции транспортного средства, идентифицирующее полосу движения, в которой, как, оценивается, должно находиться транспортное средство, содержащее генератор помех.
Если комбинация приемных устройств 401, 402 обнаруживает создающий помехи сигнал и отправляет инициирующий сигнал в модуль 204 управления камерой, изображение захватывается, как описано выше. Модуль 204 управления камерой выполнен с возможностью ассоциировать захваченное изображение с сообщением позиции транспортного средства, выводимым из анализатора 705 разности фаз, и отправлять его через линию связи в базу 205 данных изображений и процессор 206 изображений. Процессор 206 изображений может быть выполнен с возможностью осуществлять обработку изображений только для транспортного средства в позиции, соответствующей сообщению позиции транспортного средства.
Обработка изображений
Фиг. 9 предоставляет принципиальную схему, иллюстрирующую изображение 901, снятое с помощью камеры, размещаемой на портальной раме в соответствии с примерами изобретения. Фиг. 9 показывает окружение по мере того, как автомобили проезжают под и отъезжают от портальной рамы, и толстая пунктирная линия 902 иллюстрирует область, захваченную в изображении 901. Изображение 901 является типичным для изображения, захваченного посредством камеры и обработанного посредством процессора изображений.
Время захвата изображений и направление и фокус камеры типично калибруются (например, посредством модуля управления камерой) таким образом, что транспортное средство, движущееся в пределах диапазона нормальных скоростей, должно появляться внутри области, захваченной в изображении 901, если детекторы обнаруживают создающий помехи сигнал, как описано выше.
Как видно из фиг. 9, три транспортных средства захвачены в изображении 901.
В примерах, в которых используются направленные антенны, можно определять то, в какой из первой, второй и третьей полосы движения позиционируется транспортное средство, которое инициирует захват изображений, когда захватывается изображение 901. Например, если направленная антенна на портальной раме, направленная вдоль первой полосы движения (полосы 1 движения), обнаруживает создающий помехи сигнал, то это должно указывать то, что транспортное средство 903 слева от изображения 901 содержит генератор помех, испускающий создающий помехи сигнал.
В примерах, в которых разность между фазой сигнала, принимаемого в первом и втором приемных устройствах, отслеживается, также можно определять то, в какой из первой, второй и третьей полосы движения позиционируется транспортное средство, которое инициирует захват изображений, когда изображение 901 захватывается. Например, разность фаз, как проиллюстрировано на фиг. 6b, должна предполагать то, что транспортное средство 904 в центре изображения 901 (т.е. в полосе 2 движения) содержит генератор помех, испускающий создающий помехи сигнал. Следует отметить, что способ разности фаз также может предоставлять более точную информацию относительно скорости и точной позиции транспортного средства, что повышает определенность идентификации транспортного средства в изображении.
Как можно понять из фиг. 9, когда определяется позиция транспортного средства, подозреваемого в наличии генератора помех, она может использоваться посредством процессора 206 изображений для того, чтобы идентифицировать номерные знаки в соответствующей части изображения.
Например, если транспортное средство 903 слева на изображении подозревается в наличии генератора помех, процессор 206 изображений может ограничивать свой анализ обработки изображений попыткой распознавать номерные знаки в области 905, идентифицированной посредством тонкой пунктирной линии 906.
Фиг. 10 предоставляет блок-схему последовательности операций способа в соответствии с примером изобретения. На первом этапе S101, предварительно заданная полоса частот отслеживается в первом местоположении, чтобы идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства. Если создающий помехи сигнал обнаруживается на втором этапе S102, способ дополнительно содержит захват первого изображения проезжающего транспортного средства.
Различные модификации могут вноситься в примеры изобретения, описанные выше.
В примерах, описанных выше, технология для идентификации транспортных средств, содержащих генераторы помех, описана в основном с точки зрения создающего помехи сигнала, представляющего собой сигнал, предназначенный для того, чтобы создавать помехи для работы отслеживающего GNSS-устройства (т.е. создающий помехи сигнал, передаваемый в полосах GNSS-частот). Тем не менее, в других примерах, возможно то, что создающий помехи сигнал представляет собой сигнал, который создает помехи для приема и/или передачи сотовых сетевых сигналов, или, если обобщать, помехи для приема или передачи любого сигнала, используемого в отслеживающих устройствах. В таких примерах, детектор, соответственно, может быть адаптирован с возможностью обнаруживать испускание сигналов в любой требуемой части частотного спектра.
Дополнительно, примеры, описанные выше, описаны с точки зрения автомобиля, движущегося по дороге, камер и детекторов, позиционированных относительно дороги на портальной раме. Следует понимать, что камеры и/или детекторы могут устанавливаться в любой подходящей конструкции, в любой подходящей компоновке, например, на автономных опорах, на любом другом подходящем предмет уличного оборудования либо в мобильном модуле, например, в транспортном средстве, управляемом посредством правоохранительных органов, либо в карманном модуле, управляемом человеком-оператором.
Дополнительно, следует понимать, что схемы системы, показанные на фиг. 2, 3 и 7, показывают по существу логические обозначения, и что функции компонентов, проиллюстрированных на них, например, процессора в детекторе, модуля управления камерой, интерфейса, базы данных изображений и процессора изображений, могут реализовываться любым подходящим способом, например, в рамках одного процессора или распределяться по множеству соединенных процессоров.
Дополнительно, следует понимать, что технологии согласно настоящему изобретению не обязательно ограничены вариантами применения, предусматривающими автомобили, и могут включать в себя другие транспортные средства, такие как суда, самолеты и т.д.
Дополнительно, в некоторых примерах, изобретение осуществляется в качестве программного обеспечения (т.е. одной или более компьютерных программ), содержащего машиночитаемые инструкции, которые при запуске на одном или более процессоров, выполняют функции, ассоциированные с изобретением, например, с инструктированием одному или более процессоров выполнять этапы, проиллюстрированные на фиг. 10.
Изобретение относится к способам и системам для обнаружения создающих помехи сигналов, передаваемых из движущихся транспортных средств. Способ идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот, при этом способ содержит этап, на котором отслеживают предварительно заданную полосу частот в первом местоположении, чтобы идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства. Если создающий помехи сигнал обнаруживается, то способ дополнительно содержит этап, на котором захватывают первое изображение проезжающего транспортного средства, чтобы предоставлять возможность определения идентификатора проезжающего транспортного средства. Мониторинг полосы частот в первом местоположении содержит этапы, на которых, во-первых, собирают данные изменения фазы, соответствующие изменению разности фаз между первой фазой и второй фазой, причем первая фаза представляет собой фазу создающего помехи сигнала, принимаемого в первой позиции, а вторая фаза представляет собой фазу создающего помехи сигнала, принимаемого во второй позиции. Во-вторых, оценивают, из данных изменения фазы, позицию проезжающего транспортного средства в изображении. Система для идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот, содержит детектор, размещаемый в первом местоположении, и камеру. Детектор содержит, во-первых, первую антенну в первой позиции и вторую антенну во второй позиции и модуль анализатора разности фаз. Во-вторых, процессор изображений выполнен с возможностью оценивать позицию проезжающего транспортного средства в изображении из вывода модуля анализатора разности фаз. Способ и система содержат варианты. Техническим результатом является расширение арсенала технических средств. 2 н. и 24 з.п. ф-лы, 10 ил.
1. Способ идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот, при этом способ содержит этап, на котором:
- отслеживают предварительно заданную полосу частот в первом местоположении, чтобы идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства, при этом если создающий помехи сигнал обнаруживается, способ дополнительно содержит этап, на котором:
- захватывают первое изображение проезжающего транспортного средства, чтобы предоставлять возможность определения идентификатора проезжающего транспортного средства,
причем мониторинг полосы частот в первом местоположении содержит этапы, на которых:
- собирают данные изменения фазы, соответствующие изменению разности фаз между первой фазой и второй фазой, причем первая фаза представляет собой фазу создающего помехи сигнала, принимаемого в первой позиции, а вторая фаза представляет собой фазу создающего помехи сигнала, принимаемого во второй позиции, и
- оценивают, из данных изменения фазы, позицию проезжающего транспортного средства в изображении.
2. Способ по п. 1, дополнительно содержащий этап, на котором:
- выполняют процесс распознавания изображений для первого изображения, чтобы распознавать признак проезжающего транспортного средства.
3. Способ по п. 2 в котором распознанный признак представляет собой номерной знак.
4. Способ по п. 1, дополнительно содержащий этапы, на которых:
- захватывают временные данные, ассоциированные со временем, в которое захвачено изображение, и/или
- захватывают данные местоположения, ассоциированные с первым местоположением.
5. Способ по п. 4, дополнительно содержащий этапы, на которых:
- формируют сообщение отслеживания транспортных средств, содержащее сведения распознанного номерного знака проезжающего транспортного средства и временные данные и/или данные местоположения, и
- отправляют сообщение отслеживания транспортных средств третьей стороне.
6. Способ по любому из пп. 3-5, дополнительно содержащий этап, на котором:
- выполняют поиск в базе данных идентификаторов транспортных средств, содержащей сведения транспортных средств, ассоциированные со сведениями номерных знаков, чтобы определять идентификатор проезжающего транспортного средства на основе распознанного номерного знака.
7. Способ по п. 1, в котором мониторинг полосы частот в первом местоположении содержит этапы, на которых:
- отслеживают полосу частот с помощью множества направленных антенн, причем каждая направленная антенна направлена в предварительно определенном направлении, и
- оценивают позицию транспортного средства в первом изображении на основе того, какая из направленных антенн обнаруживает создающий помехи сигнал.
8. Способ по п. 7, в котором каждое предварительно определенное направление соответствует полосе движения дороги.
9. Способ по п. 1, в котором предварительно заданная частота отслеживается во множестве дополнительных местоположений, причем способ дополнительно содержит этапы, на которых:
- захватывают дополнительные изображения в каждом из дополнительных местоположений, в которых обнаруживается создающий помехи сигнал, и
- анализируют первое изображение и дополнительные изображение посредством идентификации транспортных средств, общих для первого изображения и по меньшей мере некоторых дополнительных изображений, чтобы идентифицировать проезжающее транспортное средство, испускающее создающий помехи сигнал.
10. Способ по п. 7, дополнительно содержащий этапы, на которых:
- захватывают временные данные, ассоциированные со временем, в которое захвачены первое изображение и дополнительные изображения, и
- захватывают данные местоположения, ассоциированные с первым местоположением и дополнительными местоположениями, в которых захвачены первые изображения и дополнительные изображения.
11. Способ по п. 10, дополнительно содержащий этап, на котором
- оценивают направление и/или скорость проезжающего транспортного средства на основе временных данных и данных местоположения.
12. Способ по п. 1, в котором этап оценки позиции проезжающего транспортного средства в изображении содержит этапы, на которых:
- согласуют данные изменения фазы с моделью изменения фазы, причем упомянутая модель изменения фазы представляет собой модель изменения разности фаз между первой и второй фазой с использованием набора параметров, причем упомянутые параметры включают в себя скорость и путь транспортного средства,
- определяют параметры модели,
- формируют, из параметров модели, оцененный путь и оцененную скорость проезжающего транспортного средства,
- используют оцененный путь и оцененную скорость проезжающего транспортного средства для того, чтобы определять позицию проезжающего транспортного средства в захваченном изображении.
13. Способ по п. 1, в котором предварительно заданная полоса частот представляет собой полосу частот, в которой передаются GNSS-сигналы.
14. Способ п. 1, в котором первое местоположение представляет собой портальную раму, размещаемую на дороге.
15. Система для идентификации бортового передающего устройства, испускающего создающий помехи сигнал в предварительно заданной полосе частот, при этом система содержит:
- детектор, размещаемый в первом местоположении, выполненный с возможностью отслеживать предварительно заданную полосу частот и идентифицировать испускание создающего помехи сигнала из проезжающего транспортного средства, и
- камеру, при этом:
- если детектор обнаруживает создающий помехи сигнал, детектор выполнен с возможностью отправлять инициирующий сигнал, инструктирующий камеру захватывать первое изображение проезжающего транспортного средства, за счет этого обеспечивая возможность определения идентификатора проезжающего транспортного средства,
причем детектор содержит:
- первую антенну в первой позиции и вторую антенну во второй позиции и модуль анализатора разности фаз, причем упомянутый модуль анализатора разности фаз выполнен с возможностью собирать данные, соответствующие изменению разности фаз между первой фазой и второй фазой, причем первая фаза представляет собой фазу создающего помехи сигнала, принимаемого посредством первой антенны, а вторая фаза представляет собой фазу создающего помехи сигнала, принимаемого посредством второй антенны, и
- процессор изображений выполнен с возможностью оценивать позицию проезжающего транспортного средства в изображении из вывода модуля анализатора разности фаз.
16. Система по п. 15, дополнительно содержащая процессор изображений, выполненный с возможностью осуществлять процесс распознавания изображений для первого изображения, чтобы распознавать признак проезжающего транспортного средства.
17. Система по п. 16, в которой распознанный признак представляет собой номерной знак.
18. Система по п. 17, дополнительно содержащая модуль управления камерой, выполненный с возможностью захватывать временные данные, ассоциированные со временем, в которое захвачено изображение, и/или захватывать данные местоположения, ассоциированные с первым местоположением.
19. Система по п. 18, в которой процессор изображений выполнен с возможностью принимать временные данные и данные местоположения, сформированные посредством модуля управления камерой, и формировать сообщение отслеживания транспортных средств, содержащее сведения распознанного номерного знака проезжающего транспортного средства и временные данные и данные местоположения, причем процессор изображений выполнен с возможностью отправлять сообщение отслеживания транспортных средств третьей стороне.
20. Система по любому из пп. 15-19, в которой детектор содержит множество направленных антенн, причем каждая направленная антенна направлена в предварительно определенном направлении, причем детектор выполнен с возможностью передавать в процессор изображений сообщение, указывающее то, какая направленная антенна обнаруживает создающий помехи сигнал, причем процессор изображений выполнен с возможностью идентифицировать позицию транспортного средства на основе того, какая из направленных антенн обнаруживает создающий помехи сигнал.
21. Система по п. 15, в которой каждое предварительно определенное направление соответствует полосе движения дороги.
22. Система по п. 15, содержащая детекторы и камеры во множестве дополнительных местоположений, выполненные с возможностью захватывать дополнительные изображения в каждом из дополнительных местоположений, в которых обнаруживается создающий помехи сигнал, и упомянутый процессор изображений выполнен с возможностью анализировать первое изображение и дополнительные изображения посредством идентификации транспортных средств, общих для первого изображения и, по меньшей мере, некоторых дополнительных изображений, чтобы идентифицировать проезжающее транспортное средство, испускающее создающий помехи сигнал.
23. Система по п. 22, дополнительно содержащая соответствующие модули управления камерой в каждом дополнительном местоположении, причем каждый модуль управления камерой выполнен с возможностью захватывать временные данные, ассоциированные со временем, в которое захватывается каждое дополнительное изображение, и захватывать данные местоположения, ассоциированные с каждым соответствующим дополнительным местоположением, в котором захватывается каждое дополнительное изображение.
24. Система по п. 15, в которой анализатор разности фаз выполнен с возможностью:
- согласовывать данные изменения фазы с моделью изменения фазы, причем упомянутая модель изменения фазы представляет собой модель изменения разности фаз между первой и второй фазой с использованием набора параметров, причем упомянутые параметры включают в себя скорость и путь транспортного средства,
- определять параметры модели,
- формировать, из параметров модели, оцененный путь и оцененную скорость проезжающего транспортного средства,
- передавать данные, соответствующие оцененному пути и оцененной скорости проезжающего транспортного средства, в процессор изображений, за счет этого предоставляя возможность процессору изображений оценивать позицию проезжающего транспортного средства в изображении.
25. Система по п. 15, в которой предварительно заданная полоса частот представляет собой полосу частот, в которой передаются GNSS-сигналы.
26. Система по п. 15, в которой первое местоположение представляет собой портальную раму, размещаемую на дороге.
| US 20120319897 A1, 20.12.2012 | |||
| Способ подачи газомазутной эмульсии в мартеновскую печь | 1960 |
|
SU136401A1 |

