Область техники
Настоящее изобретение относится к области ухода за одеждой.
Уровень техники
Известны системы для ухода за одеждой, содержащие базовый блок и ручной блок, соединенные посредством шланга со шнуром. Иногда их называют генераторами пара под давлением. В этом известном типе конструкции изделий ручной блок передает сигнал на базовый блок, отображая запрос пользователем генерации пара для его подачи на ручной блок через шланг со шнуром. Сигнал передают в аналоговой форме по предназначенному для этого электрическому проводу.
Этот тип изделий имеет ограничения в случае необходимости передачи дополнительных сигналов, например, сигналов от датчиков, расположенных в ручном блоке, от ручного блока на базовый блок. Эти ограничения связаны с тем, что известный шланг со шнуром может вмещать только очень ограниченное количество разных электрических проводов в связи с ограниченным поперечным сечением шланга со шнуром, а также для сохранения определенного уровня механической гибкости шланга со шнуром во время управления пользователем.
В документе US 2009/121825 раскрыта система связи для передачи данных по одному проводу между первой и второй системой для использования в системе для глажения.
В документе US 2013/125427 раскрыт утюг, содержащий бок управления, соединенный с датчиком, выполненный с возможностью отслеживания по меньшей мере одной переменной, зависящей от перемещения, утюга и генерации опорного сигнала, и выполненный с возможностью управления выходным расходом воды по меньшей мере одного выходного отверстия для воды утюга на основании опорного сигнала.
В документе JP H04 208200 раскрыт способ осуществления глажения путем управления нагревательным устройством в соответствии с частотой определения датчика определения состояния в пределах заданного временного промежутка.
В документе JP H05 76700 раскрыт способ обнаружения перепада температуры основания, положения и работы утюга для соответствующего изменения количества подаваемой воды устройства подачи воды с электрическим приводом.
В документе WO 82/03520 раскрыт способ обнаружения последнего использования приспособления под электрическим напряжением и выключения приспособления после прохождения заданного времени от этого последнего использования без дальнейшего использования.
В документе WO 2005/014917 раскрыта система глажения, содержащая утюг по меньшей мере с одним средством управления, таким как: средство нагревания; генерации пара; нагнетания воздуха или отсасывания. Система содержит по меньшей мере один датчик, выполненный с возможностью обнаружения поверхности глажения, пользователя или перемещения, вызванного пользователем, причем средство управления приводят в действие при приведении в действие датчика.
В документе JP H04 319398 раскрыт утюг, имеющий нагреватель для нагрева подошвы корпуса утюга и источник питания для питания нагревателя, управляемого средством регулировки температуры на основании температурных данных элемента измерения температуры.
Раскрытие сущности изобретения
Задача настоящего изобретения заключается в обеспечении усовершенствованной системы для ухода за одеждой, содержащей базовый блок и ручной блок, соединенные шлангом со шнуром, которая предотвращает или уменьшает вышеуказанные проблемы.
Изобретение определено независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения определяют преимущественные варианты реализации.
Система для ухода за одеждой для обработки одежды в соответствии с изобретением содержит:
- ручной блок для обработки одежды,
- датчик перемещения, взаимодействующий с первым микроконтроллером, расположенным в ручном блоке, для генерации цифрового сигнала перемещения, характеризующего перемещение ручного блока,
- базовый блок для размещения ручного блока, причем ручной блок содержит подошву, контактирующую с паровой камерой, при этом базовый блок выполнен с возможностью изменения температуры паровой камеры на основании указанного цифрового сигнала перемещения,
- шланг со шнуром для соединения базового блока и ручного блока, причем шланг со шнуром содержит:
a) канал для перемещения текучей среды от базового блока к ручному блоку,
b) один провод связи для передачи цифрового сигнала перемещения от ручного блока на базовый блок и для осуществления двусторонней цифровой связи между базовым блоком и ручным блоком.
Путем обеспечения системы для ухода за одеждой, содержащей один провод связи для осуществления двусторонней цифровой связи между базовым блоком и ручным блоком, обеспечивается возможность передачи сигнала, такого как цифровой сигнал перемещения, генерируемого ручным блоком, на базовый блок по одному проводу связи. Кроме того, так как подразумевается последовательная связь между ручным блоком и базовым блоком, количество проводов в шланге со шнуром может быть ограничено только одним проводом. Таким образом, это решение обеспечивает возможность наличия более чем одного датчика, генерирующего множество сигналов по направлению к ручному блоку, без необходимости добавления дополнительных электрических проводов в шланге со шнуром. Другими словами, количество датчиков (или количество сигналов, генерируемых данным датчиком) может быть увеличено без увеличения стоимости шланга со шнуром, так как соответствующие сигналы передаются последовательно с базовым блоком. Кроме того, реализация только одного провода связи обеспечивает механическую гибкость шланга со шнуром.
Краткое описание чертежей
Настоящее изобретение будет описано ниже со ссылкой на приведенные в качестве примера варианты реализации, изображенные на чертежах, на которых:
на ФИГ. 1 схематически показан первый вариант реализации системы для ухода за одеждой для обработки одежды в соответствии с изобретением,
на ФИГ. 2 показаны приведенные в качестве примера показания от датчика по типу акселерометра, используемого в устройстве для ухода за одеждой в соответствии с изобретением, при нахождении в состоянии покоя и в трех разных ориентациях,
на ФИГ. 3 показаны приведенные в качестве примера показания от датчика по типу акселерометра, используемого в устройстве для ухода за одеждой в соответствии с изобретением, при перемещении в трех разных ориентациях,
на ФИГ. 4A-4B показаны примеры сигналов, генерируемых акселерометром, используемым в качестве датчика в устройстве для ухода за одеждой в соответствии с изобретением,
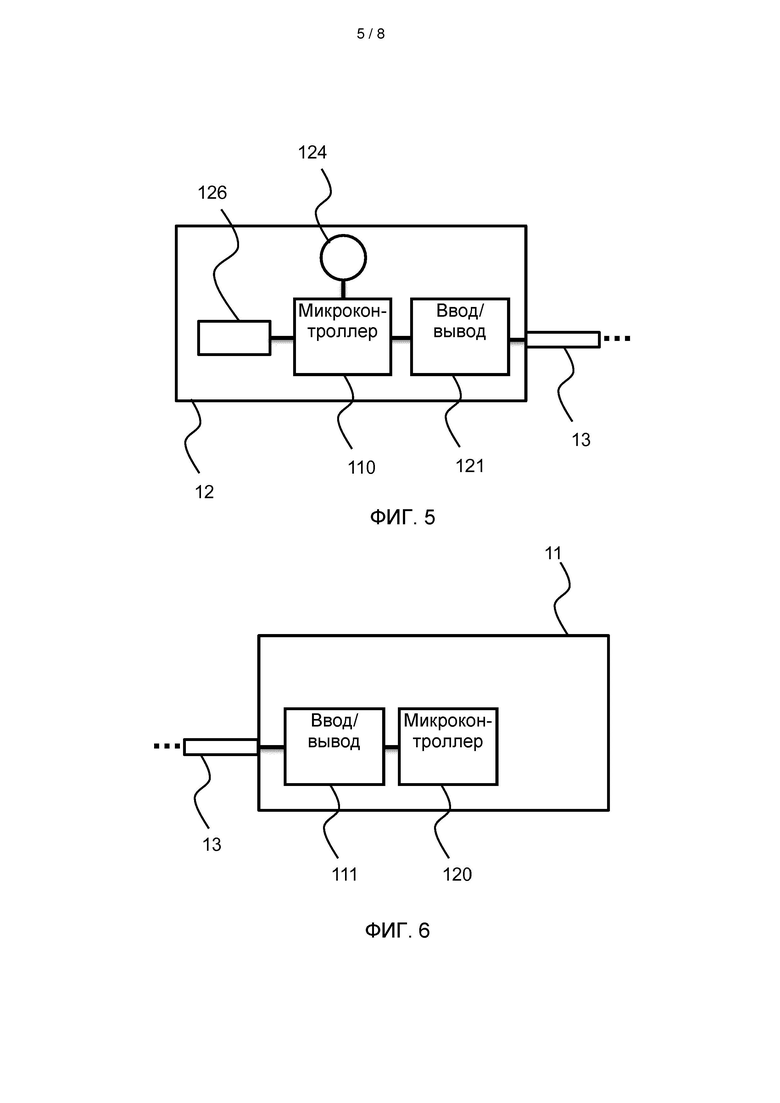
на ФИГ. 5 схематически показан вариант реализации ручного блока системы для ухода за одеждой в соответствии с изобретением,
на ФИГ. 6 схематически показан вариант реализации базового блока системы для ухода за одеждой в соответствии с изобретением,
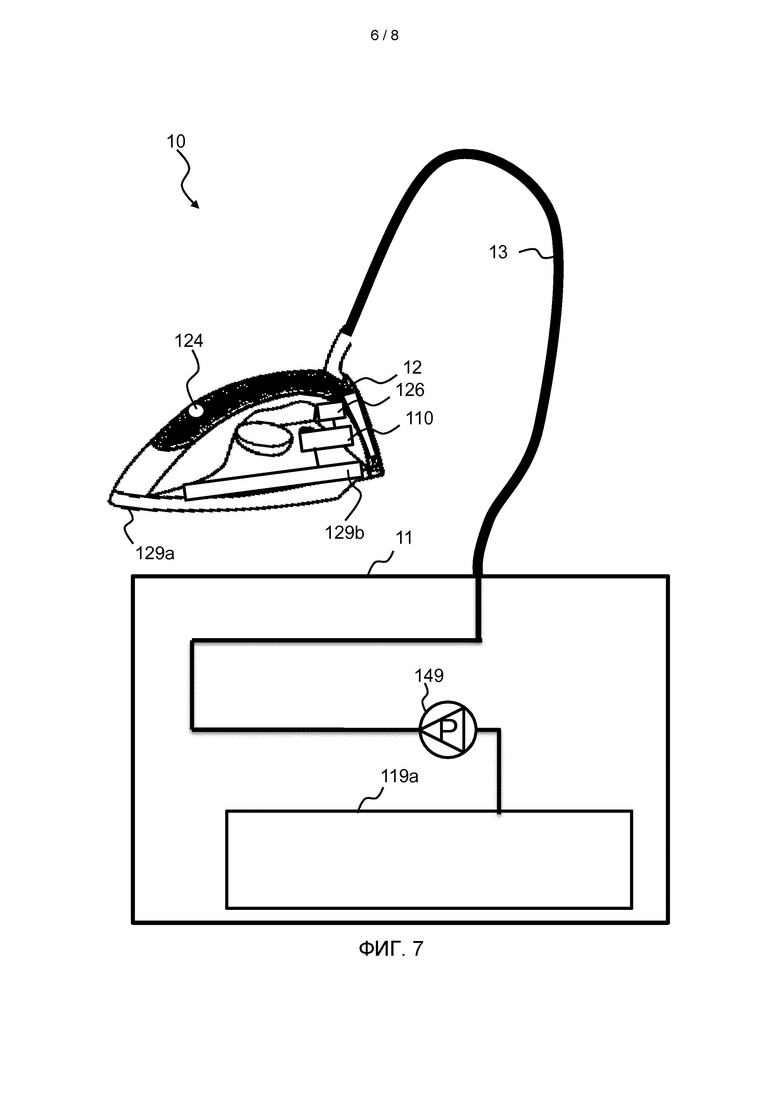
на ФИГ. 7 схематически показан второй вариант реализации системы для ухода за одеждой для обработки одежды в соответствии с изобретением,
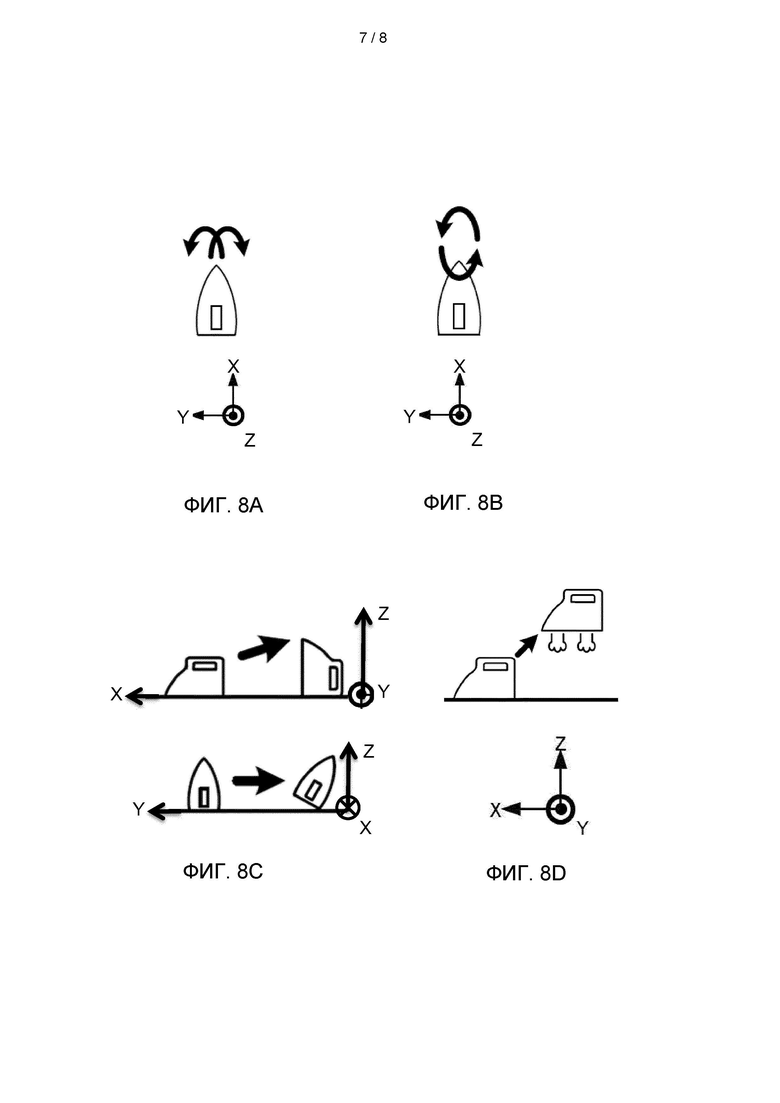
на ФИГ. 8A-8B-8C-8D изображены различные заданные схемы смещения, используемые в качестве эталона в устройстве для ухода за одеждой в соответствии с изобретением,
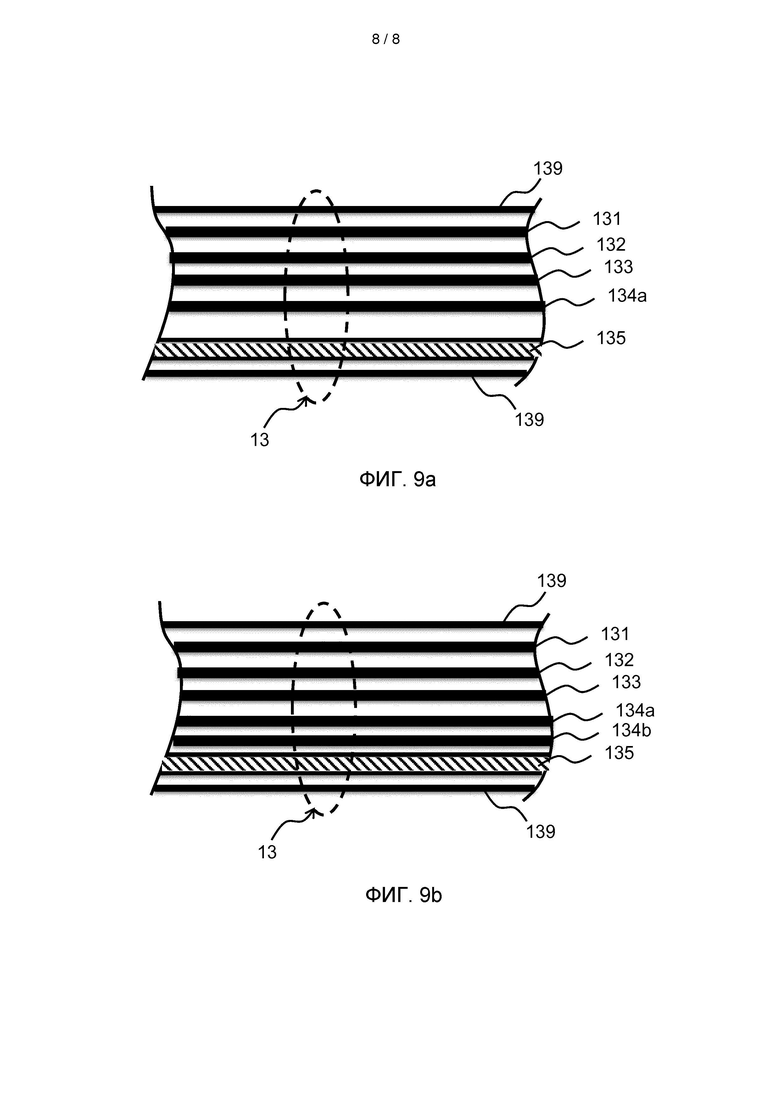
на ФИГ. 9a схематически показан первый вариант реализации шланга со шнуром для использования в системе для ухода за одеждой в соответствии с изобретением,
на ФИГ. 9b схематически показан второй вариант реализации шланга со шнуром для использования в системе для ухода за одеждой в соответствии с изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
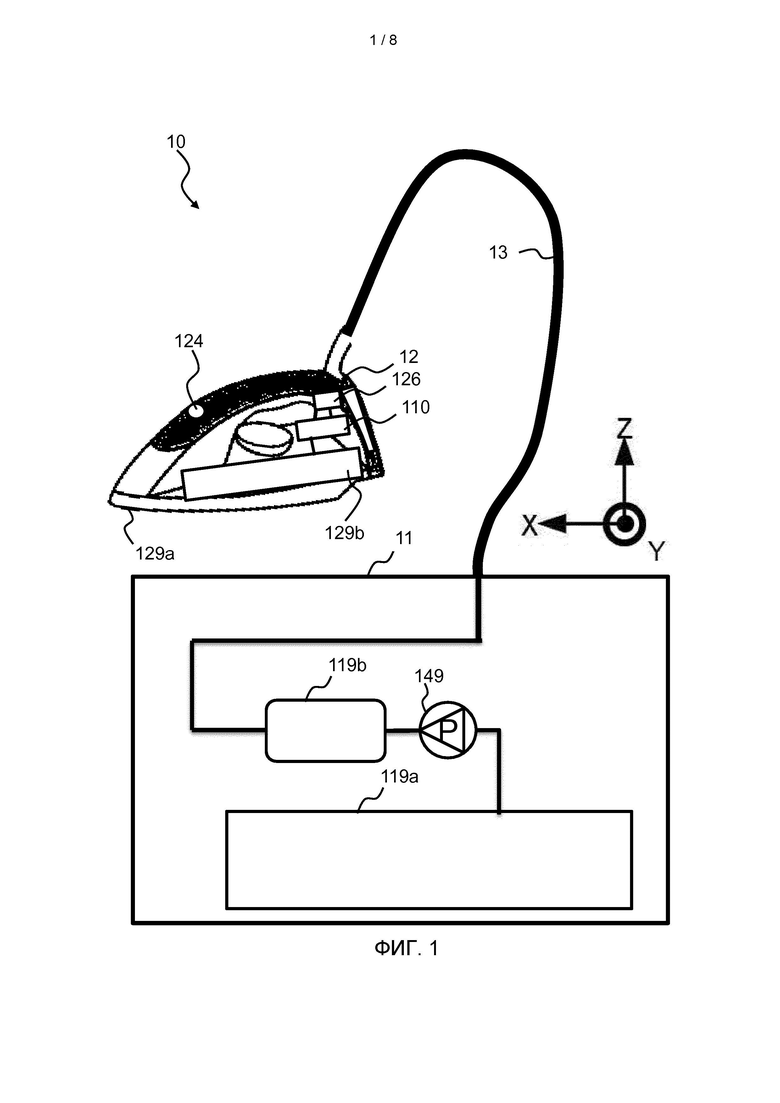
На ФИГ. 1 схематически показан первый вариант реализации системы 10 для ухода за одеждой в соответствии с изобретением.
Система 10 для ухода за одеждой содержит ручной блок 12 для обработки одежды.
Система 10 для ухода за одеждой также содержит датчик 126 перемещения, расположенный в ручном блоке 12. Датчик 126 перемещения и первый микроконтроллер 110 выполнены с возможностью генерации цифрового сигнала перемещения, характеризующего перемещение ручного блока 12.
Система 10 для ухода за одеждой также содержит базовый блок 11 для размещения на нем ручного блока 12.
Система 10 для ухода за одеждой также содержит шланг 13 со шнуром, соединяющий базовый блок 11 и ручной блок 12. Шланг 13 со шнуром содержит канал 135 для перемещения текучей среды от базового блока 11 к ручному блоку 12. Шланг 13 со шнуром также содержит один провод 134a связи для передачи цифрового сигнала перемещения от ручного блока 12 к базовому блоку 11 и для осуществления двусторонней цифровой связи между базовым блоком 11 и ручным блоком 12.
Например, ручной блок 12 представляет собой паровой утюг для глажения одежды. Альтернативно, ручной блок 12 представляет собой головку отпаривателя для подачи пара на одежду.
Предпочтительно, цифровой сигнал перемещения соответствует любому из сигнала ускорения, сигнала скорости, сигнала об угловом положении, сигнала о положении, сигнала двух положений. Альтернативно, эти датчики могут быть использованы в сочетании в ручном блоке 12. Например, сигнал двух положений может быть сгенерирован так называемым шариковым датчиком.
Датчик 126 перемещения выполнен с возможностью взаимодействия с первым микроконтроллером 110 следующим образом.
Предпочтительно, первый микроконтроллер 110 выполнен с возможностью простого перенаправления сигнала, генерируемого датчиком 126 перемещения, по одному проводу 134a связи.
Альтернативно, цифровой сигнал перемещения, посылаемый по одному проводу 134a связи, соответствует обработанному или идентифицированному цифровому сигналу перемещения (например, короткому перемещению, выполняемому пользователем, длинному перемещению, выполняемому пользователем, устройство перемещается, устройство не перемещается, горизонтальному перемещению устройства, вертикальному перемещению устройства, скорости устройства, силе перемещения и/или их сочетанию) после анализа микроконтроллером информации датчика (например, уровня ускорения сигнала (сигналов), продолжительности ускорения, перемещения шарикового датчика, частоты значения ускорения). Затем первый микроконтроллер 110 направляет обработанный или идентифицированный цифровой сигнал перемещения по одному проводу 134a связи. Цифровой сигнал перемещения может также содержать ориентацию ручного блока.
Предпочтительно, датчик 126 перемещения представляет собой датчик ускорения по типу микроэлектромеханических систем (МЭМС), выполненный с возможностью генерации по меньшей мере одного сигнала ускорения вдоль любой оси X, Y, Z, с получением ортонормального эталона, в котором Z соответствует вертикальному направлению, а X-Y задают горизонтальную плоскость.
Ориентация ручного блока может быть измерена по оси X, оси Y и оси Z. При использовании ручного блока 12 для глажения предмета одежды на поверхности (такой как гладильная доска) подошвой 129a, может считаться, что ручной блок 12 находится в горизонтальном положении X-Y. Другими словами, утюг 12 ориентирован таким образом, что поверхность подошвы 129a находится по существу в плоскости X-Y. Когда пользователь ставит ручной блок 12 на его торец так, что подошва 129a не касается предмета одежды на гладильной доске, например, может считаться, что ручной блок 12 ориентирован так, что поверхность подошвы 129a находится в плоскости, по существу перпендикулярной плоскости X-Y. Может считаться, что в этой ориентации ручной блок 12 находится в «вертикальном» положении. В дополнение к этим двух конкретным ориентациям датчик выполнен с возможностью определения ориентации и перемещения утюга 12 в любой другой ориентации.
Перемещение ручного блока 12 может быть измерено с точки зрения изменения положения ручного блока 12 вдоль оси X, оси Y и/или оси Z. В дополнение к направлению перемещения ручного блока 12 может быть измерено расстояние перемещения (например, абсолютное и/или относительное расстояние). Скорость перемещения утюга 12 может быть также измерена датчиком 126.
Первый микроконтроллер 110 может быть выполнен с возможностью регулирования рабочего параметра ручного блока 12 на основании заданного соотношения между измеренной ориентацией и/или идентифицированным перемещением ручного блока и заранее заданной схемой смещения. Для этого, ручной блок 12 может содержать средство хранения, такое как запоминающее устройство, для хранения базы данных или справочной таблицы. База данных или справочная таблица может включать множество соотношений, каждое из которых определяет требуемое регулирование рабочего параметра в ответ на определение нахождения ручного блока в конкретной ориентации и/или перемещения ручного блока определенным образом.
Ориентация и перемещение ручного блока 12 описаны ниже со ссылкой на ФИГ. 2 и 3.
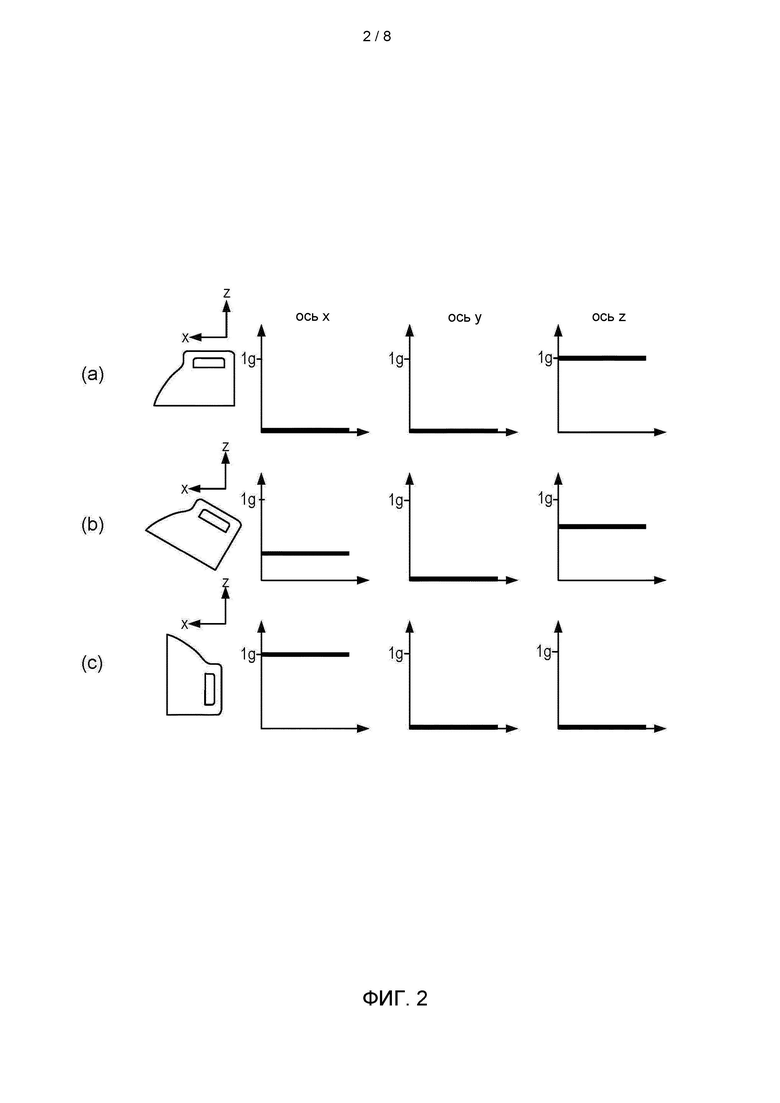
На ФИГ. 2 показаны приведенные в качестве примера показания от датчика 126 по типу акселерометра, используемого в ручном блоке 12 в соответствии с изобретением при нахождении в состоянии покоя и при ориентации в трех разных ориентациях,
- В первом ряду (a) показаны данные акселерометра, измеренные в направлениях X, Y и Z при нахождении ручного блока в «горизонтальной» ориентации (например, когда ручной блок ориентирован так, что поверхность его подошвы 129a контактирует с горизонтальной поверхностью, такой как предмет одежды, подлежащий глажению). В этой ориентации датчик 126 не регистрирует изменение от откалиброванного уровня в направлениях X или Y, но регистрирует измерение (эквивалентное силе притяжения Земли, имеющей значение 1 g = 9,81 м/с2) в направлении Z.
- В ряду (b) ручной блок наклонен относительно горизонтальной поверхности (например, гладильной доски), что может являться типичным при помещении ручного блока в базовый блок 11. В этой ориентации датчик 126 измеряет отсутствие ускорения вдоль оси y, но измеряет ускорение вдоль оси X и оси Z.
- В ряду 4c ручной блок находится в вертикальном положении, в котором ручной блок ориентирован так, что поверхность подошвы 129a может быть расположена по существу вертикально. В этой ориентации датчик 126 измеряет ускорение, эквивалентное силе притяжения Земли вдоль оси -X, но измеряет отсутствие ускорения вдоль оси Y и оси Z.
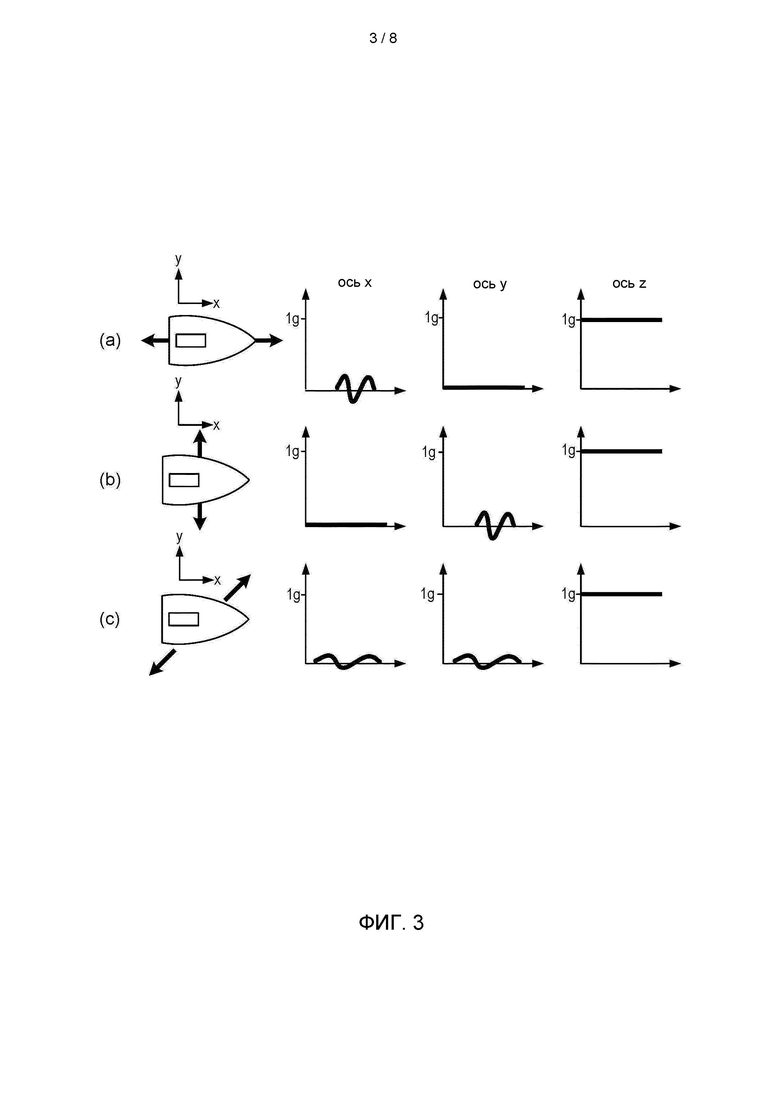
На ФИГ. 3 показаны приведенные в качестве примера показания от датчика 126 по типу акселерометра, используемого в ручном блоке 12 в соответствии с изобретением при перемещении в трех разных ориентациях.
Считается, что ручной блок 12 удерживают в «горизонтальном» положении (т.е. в плоскости X-Y) и перемещают в направлениях, указанных стрелками.
- В ряду (a) ручной блок 12 показан при перемещении вперед и назад (например, вдоль оси X, в направлении +X, затем в направлении -X, затем в направлении +X и т.д.). При этом перемещении датчик 126 измеряет ускорение вдоль оси Z, эквивалентное силе притяжения Земли, но не измеряет ускорения вдоль оси Y. Ускорение, измеренное датчиком 126 вдоль оси X, варьируется при перемещении ручного блока в одном направлении, а затем в другом.
- Ряд (b) отображает перемещение ручного блока из стороны в сторону вдоль оси Y. Аналогично, датчик измеряет ускорение вдоль оси Z, эквивалентное силе притяжения Земли, но не измеряет ускорения вдоль оси X. Однако в этом примере ускорение вдоль оси Y варьируется при перемещении ручного блока в одном направлении (в направлении +Y), а затем в другом направлении (в направлении -Y) вдоль оси Y.
- Ряд (c) отображает перемещение ручного блока в диагональном направлении в плоскости X-Y. Ускорение вдоль оси Z эквивалентно силе притяжения Земли. Однако в этом примере ускорение, измеренное вдоль оси X и оси Y, варьируется при диагональном перемещении ручного блока в одном направлении, а затем в другом.
Заданная схема смещения может соответствовать величине среднего линейного смещения вдоль данного направления D ручного блока 12. Например, данное направление D соответствует оси X, как показано в ряду (a) по ФИГ. 3.
Другими словами, среднее линейное смещение может соответствовать среднему значению длины перемещения, выполняемого пользователем, использующим ручной блок.
По определению, длина перемещения вдоль данного направления D соответствует линейному расстоянию ручного блока между начальным положением при нулевой скорости и следующим положением при нулевой скорости.
По определению, среднее значение длины перемещения, выполняемого пользователем, представляет собой среднее линейное расстояние, позволяющее классифицировать длину перемещения между коротким перемещением и длинным перемещением. Короткое перемещение меньше, чем среднее линейное расстояние, а длинное перемещение больше, чем среднее линейное расстояние.
Среднее линейное смещение устройства для ухода за одеждой может включать больше, чем одну прямую линию между двумя точками. Например, среднее линейное смещение может быть измерено в первом и втором направлении, причем второе направление ортогонально первому. Таким образом, обеспечивается возможность определения того, что устройство для ухода за одеждой перемещается по дуге путем измерения среднего линейного смещения в первом и втором направлениях. Форма дуги может быть определена относительным размером среднего линейного смещения в первом направлении и среднего линейного смещения во втором направлении. Дополнительно, форма дуги может быть определена абсолютным размером среднего линейного смещения в первом и втором направлениях. Также могут быть измерены дополнительные направления для идентификации более сложных характеристик перемещения для сравнения с заданной схемой смещения.
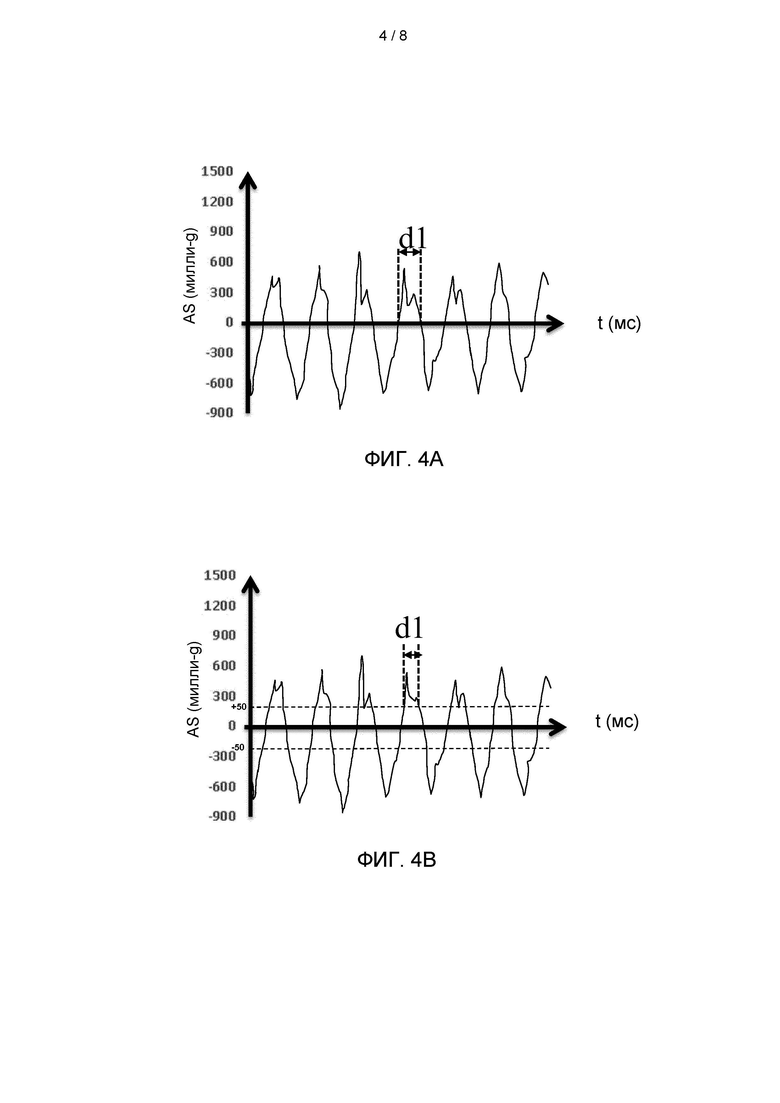
На ФИГ. 4A показано изображение примера сигнала AS, генерируемого акселерометром, используемым в ручном блоке в соответствии с изобретением.
Блок для вертикальной оси графика приведен в милли-g (или сокращенно «мg»), причем 1 g = 9,81 м/с2.
В данном случае, датчик 126 представляет собой акселерометр, а выходной сигнал, генерируемый датчиком 126 представляет собой сигнал AS ускорения, варьирующийся с течением времени в данном направлении D, таком как, например, ось X.
Характеристики выходного сигнала соответствуют временному интервалу d1 между двумя последовательными точками перехода через ноль выходного сигнала. Характеристики заданного сигнала соответствуют данному порогу d0 продолжительности:
- Если измеренный временной интервал d1 меньше, чем данный порог d0 продолжительности, перемещение, выполняемое пользователем, использующим ручной блок, идентифицируется как короткое перемещение.
- Если измеренный временной интервал d1 больше, чем данный порог d0 продолжительности, перемещение, выполняемое пользователем, использующим ручной блок, идентифицируется как длинное перемещение.
Данный порог d0 продолжительности соответствует среднему значению временного интервала между двумя последовательными точками перехода через ноль выходного сигнала, соответствующему среднему значению длины перемещения, выполняемого пользователем.
Следует отметить, что если выходной сигнал, сгенерированный датчиком 126, содержит определенный уровень шума, например +/- 50 мg, временной интервал d1 между двумя последовательными точками перехода через ноль выходного сигнала следует вычислять со смещением, соответствующим оцененному значению уровня шума. Пример изображен на ФИГ. 4B.
Предпочтительно, данный порог d0 продолжительности имеет значение в диапазоне [200; 800] мс, предпочтительно 550 мс.
Обычно, среднее значение для короткого перемещения составляет менее 20 см, а среднее значение для длинного перемещения составляет более 20 см.
В варианте реализации по ФИГ. 1 первый микроконтроллер 110 может быть выполнен с возможностью регулирования рабочего параметра ручного блока 12, в частности, регулирования температуры паровой камеры 129b таким образом, что:
- если временной интервал d1 больше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью устанавливать температуру паровой камеры 129b на первое значение T1 температуры. Это означает идентификацию длинных перемещений, выполняемых пользователем. В этом случае, для паровой камеры 129b устанавливают первую температуру T1.
- если временной интервал d1 меньше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью устанавливать температуру паровой камеры 129b на второе значение T2 температуры. Это означает идентификацию коротких перемещений, выполняемых пользователем. В этом случае, для паровой камеры 129b устанавливают вторую температуру T2.
Регулирование температуры паровой камеры 129b также приводит к изменению температуры подошвы 129a.
Например, T1 < T2, например, T1 = 175 градусов, а T2 = 180 градусов. Такой выбор температур уместен, если изначально предполагается, что короткие перемещения отражают ситуацию, при которой пользователь гладит относительно небольшую область со сложными складками, которая требует более высокой температуры.
Альтернативно, T1 > T2, например, T1 = 155 градусов, а T2 = 150 градусов. Такой выбор температур уместен, если изначально предполагается, что длинные перемещения отражают ситуацию, при которой пользователь гладит относительно большую область, по которой может рассеиваться более высокий уровень тепловой энергии без прожигания предметов одежды.
Следует отметить, что разность температуры, составляющая 5 градусов, между T1 и T2 дана исключительно в качестве примера. В более общем смысле, абсолютная разность температуры между T1 и T2 может достигать 30 градусов.
На ФИГ. 5 схематически показан вариант реализации ручного блока 12 системы для ухода за одеждой в соответствии с изобретением, а на ФИГ. 6 схематически показан вариант реализации базового блока 11 системы для ухода за одеждой в соответствии с изобретением.
Как показано, базовый блок 11 содержит второй микроконтроллер 120.
Второй микроконтроллер 120 и первый микроконтроллер 110 выполнены с возможностью последовательной связи через один провод 134a связи.
Следует отметить, что в предшествующем описании использован термин микроконтроллер, но изобретение также предусматривает альтернативные устройства, такие как микропроцессоры (с сопряженным запоминающим устройством и любыми вспомогательными схемами или специально выделенными модулями связи.
Как показано на ФИГ. 5 и ФИГ. 6, базовый блок 11 предпочтительно содержит первый интерфейс 111, соединенный со вторым микроконтроллером 120. Первый интерфейс 111 соответствует блоку ввода/вывода. Второй микроконтроллер 120 соединен со шлангом 13 со шнуром через первый интерфейс 111.
Ручной блок 12 содержит второй интерфейс 121, соединенный с первым микроконтроллером 110. Второй интерфейс 121 соответствует блоку ввода/вывода. Первый микроконтроллер 110 соединен со шлангом 13 со шнуром через второй интерфейс 121.
Предпочтительно, первый интерфейс 111 и второй интерфейс 121 выполнены с возможностью использования протокола последовательной асинхронной связи посредством приемника/передатчика.
В частности, протокол связи определен тем, что базовый блок 11 выполнен с возможностью периодически направлять командный сигнал на ручной блок 12 по одному проводу 134a связи, а ручной блок 12 выполнен с возможностью направлять цифровой сигнал перемещения на базовый блок 11 после приема командного сигнала. Это решение избегает конфликтных ситуаций, при которых сигналы были бы направлены ручным блоком 12 и базовым блоком 11 одновременно по одному проводу 134a связи.
Базовый блок 11 предпочтительно выполнен с возможностью периодического направления командного сигнала с периодом времени в диапазоне [10 мс; 100 мс]:
- если период времени больше 100мс, пользователь может ощущать задержку при нажатии на механизм пуска пара, или при перемещении утюга до перехода утюга в режим автоматической подачи пара,
- если период времени меньше 10мс, меньше данных может быть отправлено за один период, так как он слишком короткий между текущим и следующим периодом. Разность между указанными двумя периодами времени будет фактически определять количество данных, которое может быть отправлено.
Например, период времени составляет 30 мс.
Как показано на ФИГ. 1, базовый блок 11 содержит генератор 119b пара для генерации пара в качестве текучей среды в шланге 13 со шнуром. Базовый блок 11 может быть выполнен с возможностью изменять температуру генератора 119b пара на основании цифрового сигнала перемещения, полученного от датчика 126, как описано выше.
Например, если перемещение ручного блока 12 превышает определенное значение (например, ускорение или скорость ручного блока 12 превышает определенный порог), обеспечивается повышение температуры генератора 119b пара на определенное количество.
Подача воды на генератор 119b пара может осуществляться насосом 149 из резервуара 119a для воды.
На ФИГ. 7 схематически показан второй вариант реализации системы для ухода за одеждой для обработки одежды в соответствии с изобретением.
В этом варианте реализации базовый блок 11 содержит только насос 149 для подачи воды в качестве текучей среды в шланге 13 со шнуром из резервуара 119a для воды, причем базовый блок 11 выполнен с возможностью изменения расхода насоса 149 на основании цифрового сигнала перемещения.
Например, если перемещение ручного блока 12 превышает определенное значение (например, ускорение или скорость ручного блока 12 превышает определенный порог), обеспечивается повышение расхода насоса на определенное количество. Альтернативно, приведение насоса в действие происходит при перемещении ручного блока, а остановка насоса происходит при отсутствии перемещения ручного блока пользователем.
Более конкретно, первый микроконтроллер 110 может быть выполнен с возможностью регулирования рабочего параметра системы для ухода за одеждой, в частности, регулирования расхода насоса 149 таким образом, что:
- если временной интервал d1 больше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью приведения насоса 149 в действие с первым значением FR1 расхода. Это означает идентификацию длинных перемещений, выполняемых пользователем. В этом случае, к насосу 149 применяют первое значение FR1 расхода.
- если временной интервал d1 меньше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью приведения насоса 149 в действие со вторым значением FR2 расхода. Это означает идентификацию коротких перемещений, выполняемых пользователем. В этом случае, к насосу 149 применяют второе значение FR2 расхода.
Регулирование значения расхода, применяемого к водяному насосу, обеспечивает возможность изменения количества пара выходящего из отверстий ручного блока для выпуска пара.
Например, FR1 < FR2, например, FR1 = 25 г/мин и FR2 = 31 г/мин. Такой выбор расхода уместен, если изначально предполагается, что короткие перемещения отражают ситуацию, при которой пользователь гладит относительно небольшую область со сложными складками, которая требует большего количества пара.
Альтернативно, FR1 > FR2, например, FR1 = 45 г/мин и FR2 = 40 г/мин. Такой выбор расхода уместен, если изначально предполагается, что длинные перемещения отражают ситуацию, при которой пользователь гладит относительно большую область, по которой большее количество пара может поглощаться предметами одежды.
Следует отметить, что абсолютная разность расхода между FR1 и FR2 дана исключительно в качестве примера. В более общем смысле, разность расхода между ними может достигать 50 г/мин или достигать 100 г/мин.
Следует отметить, что в варианте реализации по ФИГ. 7 первый микроконтроллер 110 может также быть выполнен с возможностью регулирования температуры паровой камеры 129b, как в варианте реализации по ФИГ.1.
Также, первый микроконтроллер 110 может быть выполнен с возможностью управления количеством пара, выходящим из паровой камеры 129b, таким образом, что:
- если временной интервал d1 больше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью устанавливать количество пара, выходящего из паровой камеры 129b на первое значение SR1 расхода пара. Это означает идентификацию длинных перемещений, выполняемых пользователем.
- если временной интервал d1 меньше данного порога d0 продолжительности, первый микроконтроллер 110 выполнен с возможностью устанавливать количество пара, выходящего из паровой камеры 129b на второе значение SR2 расхода пара. Это означает идентификацию коротких перемещений, выполняемых пользователем.
Например, SR1 < SR2, например, SR1 = 100 г/мин и SR2 = 150 г/мин. Такой выбор расхода пара уместен, если изначально предполагается, что короткие перемещения отражают ситуацию, при которой пользователь гладит относительно небольшую область со сложными складками, которая требует большего количества пара.
Альтернативно, SR1 > SR2, например, SR1 = 180 г/мин и SR2 = 150 г/мин. Такой выбор расхода пара уместен, если изначально предполагается, что длинные перемещения отражают ситуацию, при которой пользователь гладит относительно большую область, по которой большее количество пара может поглощаться предметами одежды.
Следует отметить, что абсолютная разность расхода пара между SR1 и SR2 дана исключительно в качестве примера. В более общем смысле, разность расхода пара между ними может достигать 150 г/мин.
На ФИГ. 8A-8B-8C-8D изображены различные заданные схемы смещения, используемые в качестве эталона в ручном блоке в соответствии с аспектом изобретения.
Заданная схема смещения может соответствовать любой из следующих схем смещения:
- данные короткие повторяющиеся перемещения устройства для ухода за одеждой по дуге, как показано на ФИГ. 8A: это перемещение может отображать глажение предмета одежды в области вокруг пуговицы.
- данное повторяющееся круговое или эллиптическое перемещение устройства для ухода за одеждой, как показано на ФИГ. 8B: это перемещение может отображать глажение особо помятой области предмета одежды.
- данная последовательность простых перемещений между горизонтальной плоскостью и вертикальной плоскостью, как показано на ФИГ. 8C: например, схема перемещения соответствует изменению положения устройства из горизонтального положения в вертикальное положение, за которым следует перемещение, наклоняющее устройство на одну сторону.
Вышеуказанные эталонные схемы смещения предпочтительно хранятся на запоминающем устройстве. Например, сигнал ускорения каждого из этих схем смещения сохраняют. При использовании устройства для ухода за одеждой обеспечивается последовательное сравнение выходного сигнала датчика 126 с любым одним из указанных сохраненных сигналов ускорения. Если выходной сигнал датчика 126 совпадает с одним из сохраненных сигналов ускорения, рабочий параметр устройства для ухода за одеждой может быть отрегулирован блоком управления следующим образом:
- при идентификации схемы смещения по ФИГ. 8A первый микроконтроллер 110 может регулировать рабочий параметр устройства для ухода за одеждой с целью увеличения генерации пара или инициации мощного выброса пара,
- при идентификации схемы смещения по ФИГ. 8B первый микроконтроллер 110 может регулировать рабочий параметр устройства для ухода за одеждой с целью увеличения генерации пара, инициации мощного выброса пара или повышения температуры генератора пара (непрямым образом увеличивая температуру подошвы 129a).
- при идентификации схемы смещения по ФИГ. 8C: В первом примере количество генерируемого пара увеличивается, если устройство наклонено вправо, и количество генерируемого пара уменьшается, если устройство наклонено влево. Во втором примере первый режим отпаривания (например, непрерывная подача пара) инициируется, если устройство наклонено вправо, а второй режим отпаривания (например, подача пара импульсами) инициируется, если устройство наклонено влево.
Обнаружение схемы смещения по ФИГ. 8A может осуществляться следующим образом:
1) ось Y имеет импульс с пиковым значением > 50мg и пиковой шириной > 100мс, измеренной с момента времени, когда он проходит порог определения (>50 мg в соответствии с порогом шума, при его наличии) при увеличении и порог определения при уменьшении.
2) в оси X отсутствует существенный пик. Пик < 50мg (порог шума)
3) Предпочтительно, перед тем, как система распознает эту схему перемещения в боковом направлении, осуществляют по меньшей мере два измерения того, что этапы 1) и 2) последовательно удовлетворены.
Обнаружение схемы смещения по ФИГ. 8B может осуществляться следующим образом для направления по часовой стрелке:
1) ось Y имеет импульс с пиковым значением > 50мg и пиковой шириной > 100мс, измеренной с момента времени, когда он проходит порог определения (>50 мg в соответствии с порогом шума, при его наличии) при увеличении и порог определения при уменьшении.
2) X ось также имеет такое же условие, как этап 1).
3) Требуется подтверждение того, что ось Y > значения оси X при повышении Y. Предпочтительно, для подтверждения того, что ось Y поднимается выше оси X требуются данные по меньшей мере о двух последовательных ускорениях.
4) Для подтверждения направления по часовой стрелке требуется подтверждение этапов 1) 2) 3) предпочтительно два раза.
Обнаружение схемы смещения по ФИГ. 8B может осуществляться следующим образом для направления против часовой стрелки:
1) ось Y имеет импульс с пиковым значением > 50мg и пиковой шириной > 100мс, измеренной с момента времени, когда он проходит порог определения (>50 мg в соответствии с порогом шума, при его наличии) при увеличении и порог определения при уменьшении.
2) X ось также имеет такое же условие, как этап 1).
3) Требуется подтверждение того, что ось X > значения оси Y при повышении X. Предпочтительно, для подтверждения того, что ось X поднимается выше оси Y требуются данные по меньшей мере о двух последовательных ускорениях.
4) Для подтверждения направления против часовой стрелки требуется подтверждение этапов 1) 2) 3) предпочтительно два раза.
Обнаружение схемы смещения по ФИГ. 8C может осуществляться следующим образом:
1) Во-первых, ось Z подтвердит вертикальное положение при изменении с 1g на 0g. Ось X изменится с 0g на 1 g. Значение зависит от конкретного угла, в этом случае предполагается, что в идеальном случае угол составляет 90 градусов.
2) После этого, в этом положении вертикальной ориентации расположения на пятке (диапазон от 70 градусов до 130 градусов), наклон вправо определен с использованием 3 осей:
a) ось X должна иметь значение от 0g и +/-1 g в зависимости от угла
b) ось Y должна иметь значение от 0g и +/-1g в зависимости от угла
c) ось Z должна быть близко к 0g.
Значение для 2a ) и 2b) может составлять 1g, умноженное на синус или косинус угла в градусах.
3) Оба условия 1 и 2 должны быть подтверждены по меньшей мере на протяжении 500 мс.
Со ссылкой на ФИГ. 8D изображен ручной блок в соответствии с изобретением, как описано выше, содержащий паровую камеру. Датчик 126 (не показан) выполнен с возможностью генерации сигнала AS ускорения, изменяющегося с течением времени в вертикальном направлении Z. Указанный по меньшей мере один рабочий параметр содержит количество пара, генерируемое генератором пара, таким образом, чтобы уменьшать или альтернативно прекращать подачу пара, генерируемого генератором пара, если сигнал AS ускорения вдоль вертикального направления Z превышает порог более чем на 1 g.
Вышеуказанный порог предполагает, что когда устройство для ухода за одеждой не двигается и его подошва находится в горизонтальном положении, ускорение, измеренное на оси Z, равно 1 g.
Например, порог равняется 1 g + 50 мg.
Предпочтительно, дополнительное условие заключается в том, что сигнал AS ускорения вдоль вертикального направления Z должен быть больше, чем этот порог во время определенной продолжительности, например 80 мс.
Так как этот относительно быстрый внезапный подъем устройства для ухода за одеждой может характеризовать потенциальную угрозу для пользователя, первый микроконтроллер 110 может регулировать подачу пара соответствующим образом.
Уменьшение количества пара может приводить либо к уменьшению количества пара на определенный процент, либо к полному прекращению генерации пара.
Обнаружение схемы смещения по ФИГ. 8D может быть осуществлено следующим образом:
1) ось Z имеет импульс с пиковым значением > 50мg и пиковой шириной > 50мс, измеренной с момента времени, когда он проходит порог определения (>50 мg в соответствии с порогом шума, при его наличии) при увеличении и порог определения при уменьшении.
2) Важно отметить, что ось Z приблизительно находится на эталонной точке 1g. Таким образом, порог перемещения должен быть 1g +/- 50мg для того, чтобы учитывать уровень шума.
Предпочтительно, как показано на ФИГ. 1 и ФИГ. 7, ручной блок 12 содержит подошву 129a, контактирующую с паровой камерой 129b, а базовый блок 11 выполнен с возможностью изменения температуры паровой камеры 129b на основании цифрового сигнала перемещения, как описано выше.
Например, если перемещение ручного блока 12 превышает определенное значение (например, ускорение или скорость ручного блока 12 превышает определенный порог), обеспечивается повышение температуры паровой камеры 129b на определенное количество. Альтернативно, при перемещении ручного блока обеспечивается повышение температуры паровой камеры, а если пользователь не двигает ручной блок, обеспечивается уменьшение температуры паровой камеры.
На ФИГ. 9a схематически показан первый вариант реализации шланга со шнуром для использования в системе для ухода за одеждой в соответствии с изобретением.
Шланг со шнуром содержит один провод 134a связи.
Шланг со шнуром также содержит канал 135 для передачи текучей среды (в частности, воды или пара от базового блока 11 к ручному блоку 12)
Шланг со шнуром также содержит три провода 131, 132, 133 питания для подачи электропитания на ручной блок 12. В частности, три провода 131, 132, 133 питания соответствуют заземлению, фазе и нейтрали, соответственно.
Провод 133 питания используют в качестве нейтрали для электрических сигналов, передаваемых одним проводом 134a связи.
Шланг 13 со шнуром может дополнительно содержать наружную оболочку 139, используемую для защиты проводов 131, 132, 133 питания, одного провода 134a связи и канала 135.
Предпочтительно, базовый блок 11 выполнен с возможностью смещения на заданное значение напряжения постоянного тока на одном проводе 134a связи для подачи электропитания на датчик 126 перемещения. Например, значение напряжения постоянного тока составляет 24 В. Это означает, что провод 134a связи используется не только для передачи сигналов между ручным блоком и базовым блоком, но и для подачи электропитания на датчик перемещения.
Провод 133 питания используют в качестве нейтрали для электрических сигналов, передаваемых одним проводом 134a связи, и в качестве нейтрали напряжения постоянного тока, передаваемого одним проводом 134a связи.
На ФИГ. 9b схематически показан второй вариант реализации шланга со шнуром для использования в системе для ухода за одеждой в соответствии с изобретением.
В этом варианте реализации, по сравнению со шлангом со шнуром, как показано на ФИГ. 9a, шланг 13 со шнуром также содержит дополнительный провод 134b, а базовый блок 11 выполнен с возможностью прикладывать заданное значение постоянного тока к дополнительному проводу 134b для подачи электропитания на датчик 126 перемещения. Например, значение напряжения постоянного тока составляет 24 В. Это означает, что провод 134a связи используется только для передачи сигналов между ручным блоком и базовым блоком, а подача электропитания на датчик 126 перемещения обеспечивается отдельно через дополнительный провод 134b.
Провод 133 питания используют в качестве нейтрали для электрических сигналов, передаваемых одним проводом 134a связи, и в качестве нейтрали напряжения постоянного тока, передаваемого дополнительным проводом 134b.
Если датчик 126 перемещения представляет собой датчик ускорения по типу микроэлектромеханических систем (МЭМС), этот датчик может быть использован для управления, например, нагревательным элементом в ручном блоке 12 в зависимости от ориентации и/или перемещений ручного блока 12. Таким образом, базовый блок 11 может управлять неподвижным утюгом так, чтобы уменьшать его нагревание по сравнению с перемещающимся утюгом, таким образом приспосабливая нагревание утюга к его применению. Также могут быть использованы другие датчики, такие как датчики температуры или световые датчики.
Предпочтительно, ручной блок 12 содержит по меньшей мере один осветительный блок 124, такой как светоизлучающий диод («LED»).
Например, может осуществляться такое управление осветительным блоком 124, чтобы он отражал перемещение ручного блока: например свет, мигающий с частотой, пропорциональной значению или амплитуде перемещения.
В этом случае, второй микроконтроллер 120 выполнен с возможностью управления осветительным блоком 124 через один провод 134a связи на основании цифрового сигнала перемещения, передаваемого по одному проводу 134a связи от ручного блока 12 к базовому блоку 11.
В соответствии с изобретением, возможно использование только одного провода связи (или одной пары проводов связи для сообщения базового блока 11 и ручного блока 12. В частности, светоизлучающий диод(ы) в ручном блоке 12 может управляться от базового блока 11, причем датчики в ручном блоке 12 могут считываться с базового блока 11, причем их данные передаются от ручного блока 12 к базовому блоку 11 по одному проводу 134a связи.
Следует понимать, что предшествующее описание изобретения не предназначено для ограничения изобретения каким-либо образом. Разумеется, что имена существительные в единственном числе и грамматические показатели единственного числа не исключают возможность множественного числа.
Также, специалистам в данной области техники будет понятно, что настоящее изобретение не ограничено вариантами реализации, изложенными выше, и что возможно осуществление множества дополнений и модификаций без отклонения от объема изобретения, определенного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СО СВЕТОВЫМИ ИНДИКАТОРАМИ ДЛЯ УХОДА ЗА ОДЕЖДОЙ | 2018 |
|
RU2728751C1 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ОДЕЖДОЙ С ДАТЧИКОМ ПЕРЕМЕЩЕНИЯ | 2018 |
|
RU2750446C1 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ОДЕЖДОЙ С КЛАПАННОЙ СИСТЕМОЙ | 2021 |
|
RU2819062C1 |
| УСТРОЙСТВО С ОДНИМ ПОЛЬЗОВАТЕЛЬСКИМ МЕХАНИЗМОМ ВЫКЛЮЧАТЕЛЯ ДЛЯ ВЫБОРА РЕЖИМОВ РАБОТЫ | 2018 |
|
RU2728650C1 |
| СИСТЕМА ДЛЯ УХОДА ЗА ОДЕЖДОЙ С ВОДЯНЫМ НАСОСОМ | 2018 |
|
RU2762861C2 |
| Система для ухода за одеждой и способ управления ее работой | 2019 |
|
RU2801274C2 |
| СИСТЕМА ДЛЯ УХОДА ЗА ОДЕЖДОЙ | 2006 |
|
RU2417278C2 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ОДЕЖДОЙ С ДАТЧИКОМ ТЕМПЕРАТУРЫ | 2022 |
|
RU2828049C2 |
| СПОСОБ ЗАПОЛНЕНИЯ ВОДОЙ УСТРОЙСТВА ДЛЯ УХОДА ЗА ОДЕЖДОЙ | 2020 |
|
RU2765177C1 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ОДЕЖДОЙ С МЕСТОМ ХРАНЕНИЯ ШНУРА | 2020 |
|
RU2761242C1 |
Изобретение относится к системе для ухода за одеждой для обработки одежды. Система для ухода за одеждой содержит ручной блок для обработки одежды и датчик перемещения, взаимодействующий с первым микроконтроллером, расположенным в ручном блоке, для генерации цифрового сигнала перемещения, характеризующего перемещение ручного блока. Система для ухода за одеждой также содержит базовый блок для размещения ручного блока, шланг со шнуром для соединения базового блока и ручного блока. Шланг со шнуром содержит канал для передачи текучей среды от базового блока к ручному блоку и один провод связи для передачи цифрового сигнала перемещения от ручного блока к базовому блоку и для осуществления двусторонней цифровой связи между базовым блоком и ручным блоком. Это решение позволяет уменьшить количество проводов в шланге со шнуром. 13 з.п. ф-лы, 14 ил.
1. Система (10) для ухода за одеждой для обработки одежды, содержащая:
- ручной блок (12) для обработки одежды,
- датчик (126) перемещения, взаимодействующий с первым микроконтроллером (110), расположенным в ручном блоке (12), для генерации цифрового сигнала перемещения,
- базовый блок (11) для размещения на нем ручного блока (12), причем ручной блок (12) содержит подошву (129a),
- шланг (13) со шнуром для соединения базового блока (11) и ручного блока (12), содержащий:
a) канал (135) для перемещения текучей среды от базового блока (11) к ручному блоку (12),
b) один провод (134a) связи для передачи цифрового сигнала перемещения от ручного блока (12) к базовому блоку (11) и для осуществления двусторонней цифровой связи между базовым блоком (11) и ручным блоком (12),
отличающаяся тем, что
подошва (129a) находится в контакте с паровой камерой (129b);
цифровой сигнал перемещения характеризует перемещение ручного блока (12) и ориентацию ручного блока (12); а
базовый блок (11) выполнен с возможностью изменения температуры паровой камеры (129b) на основании цифрового сигнала перемещения.
2. Система для ухода за одеждой по п. 1, в которой цифровой сигнал перемещения соответствует любому из следующего: сигналу ускорения, сигналу скорости, сигналу об угловом положении, сигналу о положении, сигналу двух положений.
3. Система для ухода за одеждой по п. 1, в которой датчик (126) перемещения является датчиком ускорения по типу микроэлектромеханических систем (МЭМС).
4. Система для ухода за одеждой по любому из предыдущих пунктов, в которой:
- базовый блок (11) содержит второй микроконтроллер (120),
- второй микроконтроллер (120) и первый микроконтроллер (110) выполнены с возможностью последовательной связи через один провод (134a) связи.
5. Система для ухода за одеждой по п. 4, в которой базовый блок (11) содержит первый интерфейс (111), соединенный со вторым микроконтроллером (120), а ручной блок (12) содержит второй интерфейс (121), соединенный с первым микроконтроллером (110).
6. Система для ухода за одеждой по п. 5, в которой первый интерфейс (111) и второй интерфейс (121) выполнены с возможностью использования протокола последовательной асинхронной связи посредством приемника/передатчика.
7. Система для ухода за одеждой по п. 6, в которой протокол связи определен тем, что базовый блок (11) выполнен с возможностью периодически направлять командный сигнал на ручной блок (12) по одному проводу (134a) связи, а ручной блок (12) выполнен с возможностью направлять цифровой сигнал перемещения на базовый блок (11) после приема командного сигнала.
8. Система для ухода за одеждой по п. 7, в которой базовый блок (11) выполнен с возможностью периодического направления командного сигнала с периодом времени в диапазоне от 10 мс до 100 мс.
9. Система для ухода за одеждой по п. 1, в которой базовый блок (11) содержит генератор (119b) пара для генерации пара в качестве указанной текучей среды, причем базовый блок (11) выполнен с возможностью изменения температуры генератора (119b) пара на основании цифрового сигнала перемещения.
10. Система для ухода за одеждой по п. 1, в которой базовый блок (11) содержит насос (149) для подачи воды в качестве указанной текучей среды, причем базовый блок (11) выполнен с возможностью изменения расхода насоса (149) на основании цифрового сигнала перемещения.
11. Система для ухода за одеждой по п. 1, в которой базовый блок (11) выполнен с возможностью смещения на заданное значение напряжение постоянного тока на одном проводе (134a) связи для подачи электропитания на датчик (126) перемещения.
12. Система для ухода за одеждой по п. 1, в которой шланг (13) со шнуром также содержит дополнительный провод (134b), а базовый блок (11) выполнен с возможностью применять заданное значение постоянного тока к указанному дополнительному проводу (134b) для подачи электропитания на датчик (126) перемещения.
13. Система для ухода за одеждой по п. 4, в которой ручной блок (12) содержит осветительный блок (124), а второй микроконтроллер (120) выполнен с возможностью управления осветительным блоком (124) через один провод (134a) связи на основании цифрового сигнала перемещения, передаваемого по указанному одному проводу (134a) связи от ручного блока (12) к базовому блоку (11).
14. Система для ухода за одеждой по любому из пп. 1-13, в которой шланг (13) со шнуром дополнительно содержит три провода (131, 132, 133) питания для подачи электропитания на ручной блок (12).
| Колосоуборка | 1923 |
|
SU2009A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| JP H04208200 A, 29.07.1992. | |||

