1. Область техники, к которой относится изобретение
Изобретение относится к области птицеводства.
В частности, изобретение касается мобильного робота для птицеводческих ферм, предназначенного для предотвращения или по крайней мере для минимизации яйцекладки на полу и для улучшения яйценоскости птиц на птицеводческой ферме.
Изобретение относится также к установке для птицеводческой фермы, в которой используют один или несколько таких роботов.
2. Уровень техники
Как правило, здания птицеводческих ферм включают в себя жилую площадь, оборудованную, в частности, поилками и кормушками, и зону яйцекладки, содержащую гнезда в количестве, зависящем от количества кур-несушек в стаде, предназначенном для разведения в здании.
Производство яиц начинается с фазы приучения к гнезду после перевода кур в здание и продолжается в течение нескольких недель. Во время этого критического периода птицы должны научиться нестись в гнездах, которые они должны воспринимать как наиболее подходящую для этого зону в здании.
Однако некоторые птицы предпочитают нестись в других местах здания на полу или на напольной решетке (в частности, под кормушками или поилками, или вдоль стен).
Яйца, откладываемые за пределами гнезд, имеют грязный вид, что требует ручной очистки, и больше подвержены заражению бактериями. Эти отложенные на полу яйца не могут быть помещены в инкубатор и в некоторых случаях должны быть уничтожены из соображений санитарии (в случае, когда для профилактики инфекций на однодневных цыплятах предписано применение антибиотиков) или отсортированы в более низкую категорию.
Во время этой фазы обучения, чтобы избежать яйцекладки на полу, часто уменьшают толщину подстилки на полу.
Кроме того, фермер должен регулярно перемещаться между птицами, чтобы их осторожно беспокоить и направлять к гнездам.
Снижение процента яйцекладки на полу, в частности, во время периода обучения, во многом зависит от качества и частоты действий фермера, который, таким образом, должен проводить несколько часов в день для обучения птиц на своей ферме (следует отметить, что регулярные посещения фермера заставляют также птиц, которые прячутся и остаются на одном месте, перемещаться, чтобы их стимулировать и улучшить их яйценоскость).
Можно легко понять, что это приводит к увеличению затрат труда фермера, которые должен не только обходить пешком все здания своей фермы, чтобы беспокоить птиц, но также собирать яйца с пола (так как куры стремятся нестись в местах, где уже есть яйцо).
Жара внутри зданий фермы, а также присутствие аммиака, пыли и шума могут создавать у фермеров проблемы со здоровьем.
Следовательно, яйцекладка на полу имеет отрицательные последствия: уменьшение количества яиц, отвечающих критериям качества, повторяющаяся и утомительная работа для фермера, побуждение других птиц к яйцекладке на полу, снижение производительности и рентабельности во всех звеньях цепочки (в цепочке ощущается нехватка инкубационных яиц (ОАС)).
Несмотря на частые посещения зданий фермерами для перемещения птиц, последние постепенно привыкают к присутствию фермеров.
Таким образом, современные технологии, предназначенные для обучения птиц к яйцекладке только в гнездах и для улучшения их яйценоскости, не дают полностью удовлетворительных результатов.
3. Раскрытие сущности изобретения
Изобретение не рассматривает эти проблемы, связанные с методами обучения птиц к яйцекладке в гнездах.
Действительно, изобретение относится к мобильному обучающему роботу для птицеводческой фермы, содержащей по меньшей мере одну зону яйцекладки, при этом робот содержит средства перемещения робота по полу.
Согласно изобретению, такой робот дополнительно содержит:
- средства побуждения к подвижности по меньшей мере двух разных типов для принудительного перемещения сидящих на полу птиц по меньшей мере в одну зону яйцекладки,
- средства управления указанными средствами побуждения к подвижности, и
- механические средства разравнивания и аэрации пола.
Таким образом, изобретением предложен обучающий робот, который является исключительно полезным в фазе приучения к гнезду, чтобы приучать птиц нестись в гнездах, а не на полу. Такой робот позволяет облегчить работу фермеров.
Применение разных средств побуждения к подвижности позволяет помешать привыканию птиц к присутствию робота и его средств побуждения к подвижности.
Применения средств ухода (аэрации) и разравнивания пола позволяет избегать образования неравномерных зон, называемых укрытиями, которые птицы выбирают для откладывания яиц. Кроме того, это позволяет сократить утомительную работу для фермеров. Наконец, регулярная аэрация пола позволяет снизить степень его влажности, которая может быть причиной заболеваний (пример: дерматит лапки у курицы).
Эти механические средства ухода (аэрации) и разравнивания пола предназначены для вхождения в контакт с полом и выполнены в виде расположенных в линию зубьев (бороны) или вращающихся колес с зубьями.
В варианте применения мобильный робот следует заранее определенной траектории по всей отведенной ему территории фермы, что позволяет убедиться, что он перемещается по всей этой территории и что происходит обучение всей птицы на всей этой территории.
Кроме того, это перемещение определяют таким образом, чтобы мобильный робот заставлял птиц перемещаться в направлении гнезда.
Согласно частному варианту осуществления изобретения, мобильный робот содержит модуль сбора яиц с пола.
Предпочтительно такой модуль сбора яиц с пола содержит:
- множество коаксиально расположенных дисков для захвата яиц с пола,
- элементы для направления яиц к захватным дискам,
- контейнер для сбора яиц, имеющий наклонную стенку дна,
- между двумя смежными захватными дисками - по меньшей мере один выталкивающий палец для извлечения яйца, находящегося между двумя захватными дисками, и для его направления в указанный контейнер, и
- между двумя смежными захватными дисками - по меньшей мере один палец для удержания яйца между двумя захватными дисками.
В варианте осуществления диски являются механизированными и выполнены с возможностью нахождения на расстоянии от пола.
В варианте осуществления диски входят в контакт с полом и приводятся во вращение при движении робота.
Такой модуль сбора яиц на полу обеспечивает выигрыш в многофункциональности робота и позволяет облегчить работу фермеров.
Кроме того, эта особая конструкция модуля обеспечивает сбор яиц и одновременно гарантирует их структурную целостность.
Согласно частному варианту осуществления изобретения, такие средства побуждения к подвижности выбирают из группы, в которую входят:
- по меньшей мере один источник звука;
- по меньшей мере один источник света;
- по меньшей мере один подвижный механический элемент;
- по меньшей мере одно электроразрядное устройство.
Такие средства побуждения к подвижности представляют собой стимуляторы разных видов, которые являются простыми в применении и недорогими.
Подвижный механический элемент может представлять собой шарнирную руку, флажок, приводимый в движение средствами колебания, вращающийся диск или любое другое подвижное механическое устройство, позволяющее обучать птицу. Электроразрядное устройство позволяет производить слабые электрические разряды при контакте с птицей.
В роботе можно применять один или несколько фиксированных или мигающих световых источников (например, типа светодиодов) с меняющимися цветом и частотой. В варианте можно применять комбинацию световых источников разного цвета. Одновременно можно активировать только одно или несколько средств побуждения к подвижности.
Предпочтительно последовательные циклы активации средств побуждения к подвижности не являются идентичными, чтобы птицы не привыкали к присутствию робота.
В зависимости от степени привыкаемости птиц эти средства побуждения к подвижности можно не активировать в течение более или менее продолжительного периода (в частности, по завершении периода обучения). Вместе с тем, робот можно использовать для обеспечения описанных ниже вспомогательных функций.
Согласно частному варианту осуществления изобретения, средства управления выполнены с возможностью активировать средства побуждения к подвижности разных типов одно за другим или одновременно.
Согласно частному варианту осуществления изобретения, такой робот содержит средства геолокализации робота.
Эти средства геолокализации робота позволяют определять точное положение робота внутри жилой зоны и убеждаться, что траектория робота как можно точнее следует заранее определенной теоретической траектории.
Согласно частному варианту осуществления изобретения, такой робот содержит датчики измерения параметров окружающей среды птицеводческой фермы и, в частности, здания птицеводческой фермы, когда ферма находится в закрытом пространстве.
Эти датчики позволяют получать картографию параметров окружающей среды по всему зданию птицеводческой фермы.
Для этого робот содержит средства обработки, выполненные с возможностью выдавать картографию параметров окружающей среды птицеводческой фермы в зависимости от измеренных параметров окружающей среды.
В частности, параметры окружающей среды выбирают из группы, в которую входят:
- окружающая температура;
- давление;
- влажность;
- содержание диоксида углерода;
- содержание аммиака.
Здания птицеводческой фермы, в частности, в случае закрытых птицеводческих ферм должны отвечать критериям окружающей среды, относящимся, в частности, к содержанию аммиака и диоксида углерода, к влажности, к окружающей температуре и к давлению. Измерение этих параметров роботом позволяет обнаруживать ненормальную ситуацию, требующую вмешательства человека.
Применение этих датчиков параметров окружающей среды позволяет улучшать условия жизни птиц и экономить природные ресурсы, в частности, в рамках улучшения подстилок (экономия стружки, газа и т.д.) посредством их аэрации, а также посредством измерения температуры и влажности.
Согласно частному варианту осуществления изобретения, такой робот содержит датчики измерения физиологических параметров птиц.
В частности, робот содержит датчик измерения температуры тела птиц.
Применение датчика этого типа позволяет улучшить состояние здоровья птиц.
Согласно частному варианту осуществления изобретения, такой робот содержит датчики сбора визуальных и/или звуковых данных.
В частности, речь может идти о фотоаппарате, о видеокамере, о микрофоне.
Согласно частному варианту осуществления изобретения, такой робот содержит средства обработки измеряемых параметров и/или получаемых визуальных и/или звуковых данных, выполненные с возможностью выдавать картографию мертвых птиц и/или откладываемых на полу яиц.
Эти средства обработки используют картографическую программу, позволяющую получать на графическом изображении фермы положение мертвых птиц и положение яиц на полу.
Такая программа может выдавать статистические данные по этим аспектам.
Согласно частному варианту осуществления изобретения, такой робот содержит средства беспроводной связи, выполненные с возможностью передавать измеряемые параметры и/или получаемые визуальные данные и/или получаемые звуковые данные в направлении удаленного объекта.
Робот может передавать картографию мертвых птиц и присутствия яиц на полу, а также статистические данные в направлении удаленного объекта.
Согласно частному варианту осуществления изобретения, такой робот содержит средства определения аномалии среди измеренных параметров, полученных визуальных данных и полученных звуковых данных, а также средства генерирования тревожного сигнала, предназначенного для передачи через средства связи.
Такой тревожный сигнал может быть передан фермеру или ветеринару.
Объектом изобретения является также установка для птицеводческой фермы, содержащая по меньшей мере один описанный выше робот.
4. Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания предпочтительного варианта осуществления изобретения, представленного в качестве простого иллюстративного и неограничивающего примера, со ссылками на прилагаемые чертежи, на которых:
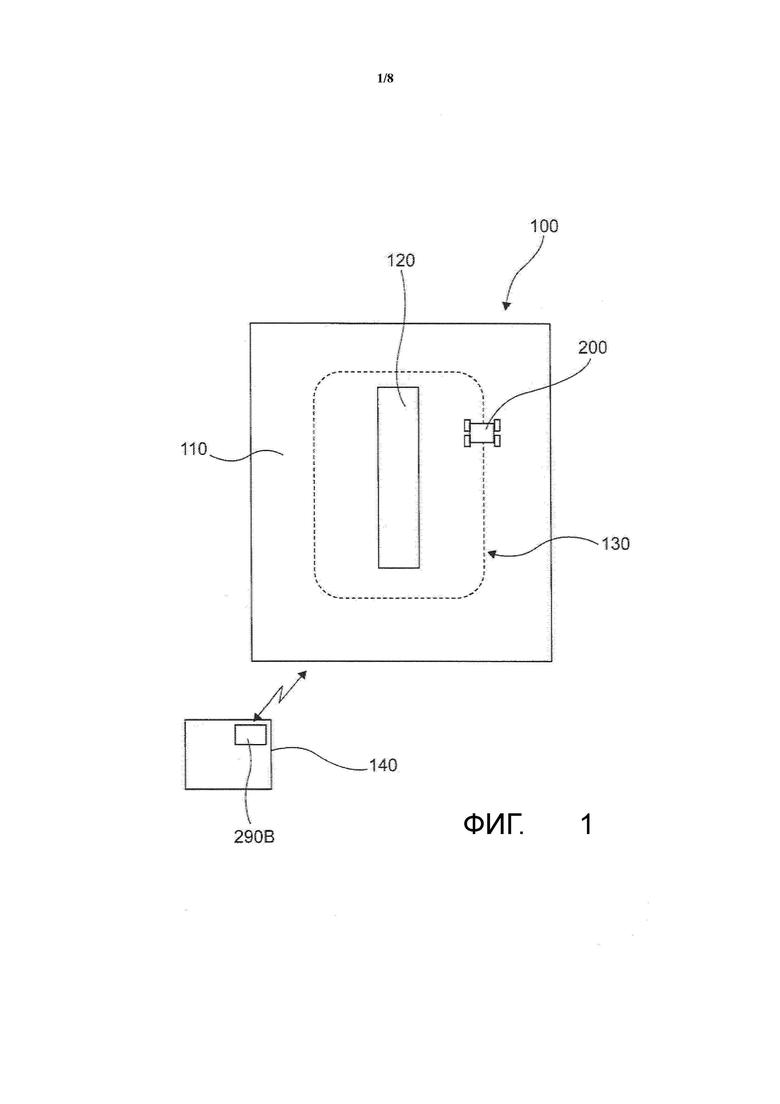
на фиг. 1 схематично показано здание птицеводческой фермы, в котором применяют заявленный мобильный робот, вид сверху;
на фиг. 2 схематично показан мобильный робот в соответствии с изобретением;
на фиг. 3 показан модуль сбора яиц c пола в составе заявленного робота, вид в перспективе;
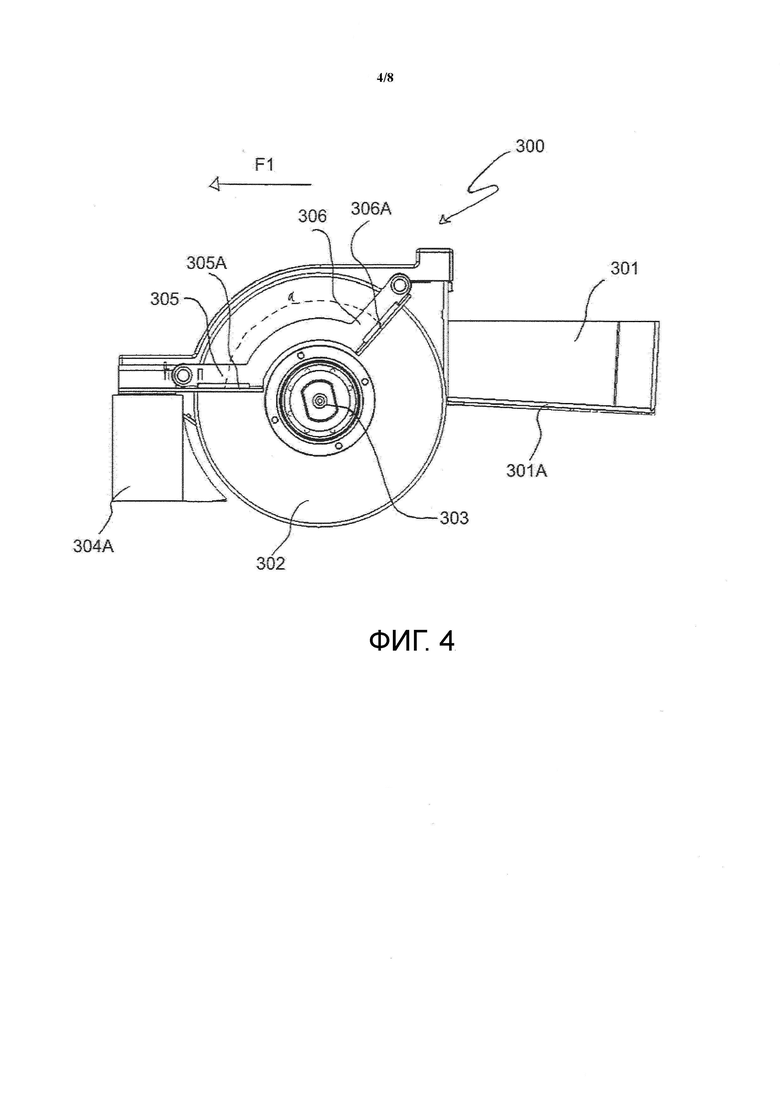
на фиг. 4 показан модуль сбора яиц с пола, изображенный на фиг. 3, вид сбоку;
на фиг. 5А и 5В показан мобильный робот согласно первому варианту осуществления изобретения с применением механических средств разравнивания и аэрации пола первого типа, виды в перспективе и сверху;
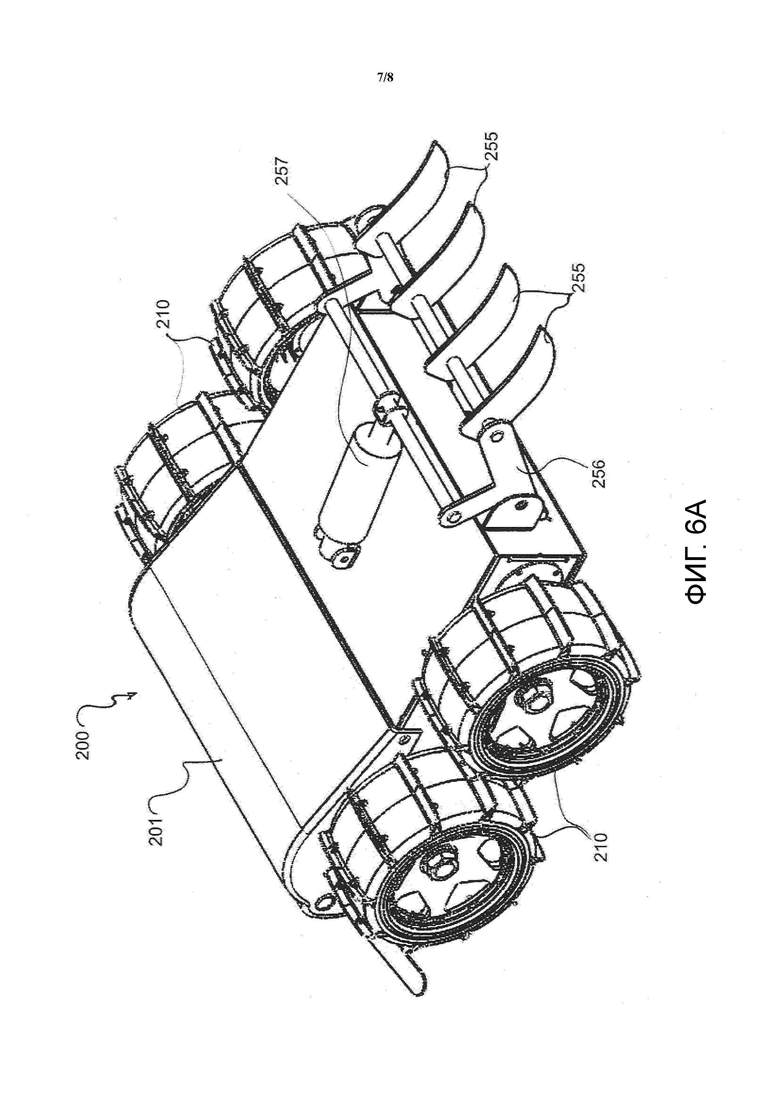
на фиг. 6А и 6В показан мобильный робот согласно первому варианту осуществления изобретения с применением механических средств разравнивания и аэрации пола второго типа, виды в перспективе и сверху.
5. Осуществление изобретения
5.1. Принцип изобретения
Общий принцип изобретения основан на автономном мобильном роботе, который выполнен с возможностью «приучать» птиц птицеводческой фермы нестись в гнездах и заставлять их перемещаться.
Этот робот содержит несколько типов средств побуждения к подвижности, чтобы сводить к минимуму яйцекладку на полу и избегать или по крайней мере минимизировать явление привыкания птиц к присутствию робота, в частности, во время периода приучения к гнезду.
Кроме того, обучение птиц роботом позволяет стимулировать статичных птиц с целью оптимизации их яйценоскости.
Этот робот дополнительно содержит механические средства разравнивания и аэрации пола, покрытого подстилкой (древесные стружки, солома,…), такие как грабли или борона.
Такие механические средства позволяют избегать образования зон укрытия, которые способствуют яйцекладке на полу, облегчить работу фермеров, ограничить степень влажности пола, которая может быть причиной заболеваний (например, дерматита лапки курицы).
Кроме того, использование инструмента аэрации подстилки позволяет увеличить срок ее годности и, следовательно, ограничить ее замену (экономический эффект).
Кроме того, этот робот может содержать устройство сбора яиц с пола.
5.2. Подробное описание варианта осуществления
На фиг. 1 представлен схематичный вид сверху здания 100 птицеводческой фермы для стада кур-несушек. Здание 100 птицеводческой фермы содержит санитарный шлюз (не показан), жилую зону 110, в которой расположены, в частности, насесты, поилки и кормушки, и зону 120 яйцекладки, содержащую гнезда в количестве, зависящем от количества птиц на птицеводческой ферме. Сбор яиц можно производить вручную или при помощи транспортера или конвейера (не показан).
Заявленный робот 200 выполнен с возможностью перемещаться в жилой зоне 110, чтобы препятствовать, в частности, яйцекладке на полу путем обучения птиц (в жилой зоне 110 можно предусмотреть несколько роботов).
Схематично показана траектория 130 среди нескольких возможных траекторий, которой следует робот 200, когда его приводят в движение.
На роботе 200 установлены средства 290А беспроводной связи (фиг. 2), включающие в себя средства передачи данных и средства приема данных.
На фиг. 1 показано также помещение 140, которое находится на удалении от здания 100 птицеводческой фермы. Речь может идти о пристройке к зданию 100 птицеводческой фермы или о рабочем месте или месте проживания фермера или ветеринара, которое относительно удалено от здания 100 птицеводческой фермы.
Помещение 140 оснащено средствами 290В связи (например, портативный компьютер, мобильный телефон или сенсорный планшет), предназначенными для осуществления связи, в частности, с роботом, что будет подробно описано ниже. Средства 290В связи включают в себя средства передачи данных и средства приема данных. Обмен данными между средствами связи 290А и 290В может происходить через связь Wi-Fi (зарегистрированный товарный знак), Bluetooth (зарегистрированный товарный знак), SIGFOX (зарегистрированный товарный знак), LoRa (зарегистрированный товарный знак) или при помощи радиоэлектрических волн.
На фиг. 2 представлен схематичный вид робота 200 в соответствии с изобретением, который может перемещаться по полу жилой зоны 110 здания 100 птицеводческой фермы.
Робот 200 содержит шасси 201 с колесами, а именно двумя передними колесами 210 и двумя задними колесами 210, установленными по бокам шасси 201, двигатель 202 привода колес 210 и источник 203 энергии в виде одной или нескольких электрических батарей.
Робот может быть оснащен тремя или более колесами. Можно также применять другие средства передвижения, такие как гусеницы или шарнирные ноги, и другие источники энергии.
Перемещение робота
В примере, представленном на фиг. 1, робот 200 запрограммирован таким образом, чтобы следовать заранее определенной траектории 130, в частности, при помощи средств 280 направления и навигации, содержащих:
- один или несколько инерциальных датчиков 281 (акселерометры, гирометры…), магнитометр 282 и средства 284 геолокализации (радиочастотные, лазерные или спутниковые (GPS)),
- один или несколько ультразвуковых (или оптических, или инфракрасных) датчиков 283, предназначенных для обнаружения неподвижного (ведро, мертвая курица) или подвижного (курица) препятствия,
- первый микропроцессор 285, связанный с двигателем привода колес, и
- первое запоминающее устройство 286, связанное с первым микропроцессором 285.
На основании сигналов, поступающих от датчиков 281-284, средства 280 направления и навигации управляют движением колес 210 робота 200.
Когда ультразвуковые датчики 283 обнаруживают препятствие, средства 280 направления и навигации управляют движением колес 210 робота 200 таким образом, чтобы объехать препятствие (маневр уклонения).
После объезда препятствия робот 200 продолжает свой путь вдоль траектории 130.
Функция побуждения к подвижности
Для эффективного побуждения птиц к подвижности внутри их жилой зоны 110 на роботе 200 используют несколько типов средств 220 побуждения к подвижности, которые активируются средствами 230 управления. Эти средства 230 управления содержат второй микропроцессор 231, выполненный с возможностью выдавать командные сигналы на соответствующие приводы средств 221-224 побуждения к подвижности.
В представленном примере эти средства 220 побуждения к подвижности включают в себя по меньшей мере один источник 221 звука, по меньшей мере один источник 222 света, по меньшей мере один подвижный механический элемент, такой как шарнирная механическая рука 223, и по меньшей мере одно электроразрядное устройство 224 слабой силы.
Эти средства 221-224 побуждения к подвижности выдают, таким образом, стимулы разной природы (соответственно звуковой, световой, механический и электрический).
Средства 230 управления выполнены с возможностью, с одной стороны, активировать или деактивировать каждое из средств 221-224 побуждения к подвижности и, с другой стороны, контролировать параметры (интенсивность, частота,…) выдаваемых стимулов.
В частности, средства 230 управления позволяют контролировать движения шарнирной механической руки 223, в частности, ее скорость и ее положение.
Вместе с тем, не выходя за рамки изобретения, можно применять и другие типы средств побуждения к подвижности.
Например, свободный конец шарнирной механической руки 223 можно оснастить звуковым и/или светоизлучающим устройством, чтобы лучше ориентировать направления излучения стимулов относительно птиц, находящихся перед роботом 200.
Чтобы препятствовать явлению привыкания птиц к присутствию робота 200, средства 230 управления могут быть запрограммированы (в запоминающее устройство 232 могут быть записаны одна или несколько программ), чтобы приводить в действие средства 220 побуждения к подвижности при помощи разных циклов (один за другим, в комбинации или нет, периодически или нет) с разными интенсивностью и частотой заранее определенным образом, случайно или не случайно, на всем пути перемещения робота 200 вдоль траектории 130.
Можно предусмотреть несколько световых источников разного цвета.
Кроме того, можно предусмотреть единый цикл активации средств 220 побуждения к подвижности, который повторяют в ходе всего перемещения робота 200.
Наконец, можно предусмотреть активацию средств 220 побуждения к подвижности, только когда робот 200 обнаруживает присутствие одной или нескольких птиц в заранее определенном периметре вокруг робота 200 (например, при помощи визуальной информации, получаемой модулем 260 считывания).
Возможность программирования средств 230 управления обеспечивает определенную гибкость в управлении средствами 220 побуждения к подвижности. В зависимости от полученных результатов (процент яйцекладки на полу, яйценоскость птиц, реакция птиц на стимулы) оператор может перепрограммировать робот 200 для изменения цикла или циклов активации средств 220 побуждения к подвижности.
Это перепрограммирование можно осуществлять дистанционно, в частности, при помощи средств 290В связи помещения 140, которые выполнены с возможностью осуществлять связь со средствами 290А связи робота 200.
Предпочтительно средства 220 побуждения к подвижности расположены на передней и/или на верхней части робота 200.
Функция сбора яиц
В частном варианте осуществления робот 200 дополнительно содержит модуль 300 сбора яиц с пола.
Для большей наглядности модуль 300 сбора яиц показан отдельно от робота 200. Однако понятно, что такой модуль 300 сбора яиц соединен с шасси робота 200 неподвижно или разъемно, в частности, при помощи реверсивных средств защелкивания.
Как показано на фиг. 3, модуль 300 сбора яиц содержит контейнер 301 для сбора яиц. В этом примере контейнер 301 для сбора яиц находится сзади модуля 300 сбора яиц, при этом находящиеся на полу яйца направляются в сторону контейнера 301 при помощи средств сбора яиц на полу.
Эти средства содержат вал 303, на котором установлены диски 302 для захвата яиц, причем эти диски 302 являются коаксиальными и отстоят друг от друга. Ширину последовательных промежутков между захватными дисками 302 определяют в зависимости от размера яиц. Находящиеся на полу яйца направляются в пространство между двумя смежными захватными дисками 302, удерживаются и затем приподнимаются над полом находящимися друг против друга поверхностями этих двух захватных дисков 302, после чего направляются в контейнер 301.
В каждом промежутке между двумя смежными захватными дисками 302 находятся выталкивающие пальцы 306, расположенные с наклоном относительно вертикали для обеспечения удаления яиц, «зажатых» между двумя захватными дисками 302, в контейнер 301, и удерживающие пальцы 305, расположенные горизонтально для блокировки перемещения яиц вниз, когда робот 200 отходит назад, чтобы яйца не вращались вместе с захватными дисками 302 и не падали на пол.
В этом примере, учитывая, что контейнер 301 находится сзади модуля 300 сбора яиц, выталкивающие пальцы 306 находятся также между захватными дисками 302 и контейнером 301.
Выталкивающие пальцы 306 и удерживающие пальцы 305 установлены на горизонтальных осях и отделены друг от друга распорками 307.
Модуль 300 сбора яиц дополнительно содержит множество средств 304 направления яиц, выполненных в виде вертикальных пластин, расположенных в продолжении поверхностей захватных дисков 302.
Так, каждое направляющее средство 304 расположено на одной линии с захватным диском 302, чтобы направлять яйца на полу в пространства между захватными дисками 302 и чтобы эти диски не катились по яйцам.
Все или часть направляющего средства 304 покрыта слоем 304А мягкого материала, амортизирующим удары, когда направляющее средство 304 входит в контакт с яйцом.
Как показано на фиг. 4, стенка 301А дна контейнера 301 является наклонной. Эта особая форма позволяет яйцам на первом этапе перекатываться в стороны дна контейнера 301, а на втором этапе сводить к минимуму свободу их движения при перемещении робота.
Как показано на фиг. 4, выталкивающие 306 и удерживающие 305 пальцы содержат, каждый, по меньшей мере на поверхности, потенциально входящей в контакт с яйцами, защитные элементы 305А, 306А.
Такие защитные элементы 305А, 306А позволяют амортизировать удары и гарантировать, таким образом, структурную целостность яиц, когда они входят в контакт с выталкивающими 306 или удерживающими 305 пальцами.
Кроме того, для каждого промежутка между двумя смежными захватными дисками 302 выталкивающий палец 306 и удерживающий палец 305 отстоят друг от друга на угол α со значением, составляющим от 120° до 150°, предпочтительно приблизительно равным 135°.
Далее со ссылками на фиг. 3 и 4 следует описание работы модуля 300 сбора яиц.
Когда робот 200 движется вперед в направлении стрелки F1, захватные диски 302 приводятся во вращение в направлении против часовой стрелки либо моторизованным элементом (захватные диски 302 не входят в контакт с полом), либо за счет контакта между захватными дисками 302 и полом (захватные диски 302 не моторизованы, но приводятся во вращение при движении робота).
Предпочтительно захватные диски 302 по меньшей мене попарно механически связаны во вращении.
Когда модуль 300 сбора яиц входит в контакт с яйцом, если это яйцо не находится на одной оси с промежутком между двумя захватными дисками 302, оно входит в контакт с направляющим элементом 304, который направляет его в промежуток между двумя захватными дисками 302.
Затем яйцо входит в контакт с двумя вращающимися смежными захватными дисками 302. Захватные диски 302 слегка отходят друг от друга и удерживают заблокированное яйцо.
Движение вращения двух смежных захватных дисков 302 позволяет перемещать яйцо снизу вверх круговым движением относительно вала 303.
Когда яйцо доходит до уровня контейнера 301, оно входит в контакт с выталкивающим пальцем 306. Движение вращения захватных дисков 302 приводит к проскальзыванию яйца сверху вниз по защитному элементу 306 выталкивающего пальца 306 и к его удалению в контейнер 301.
После попадания в контейнер 301 яйцо скатывается в сторону дна контейнера по причине наклона стенки 301А дна.
Когда контейнер 301 оказывается заполненным, робот 200 может быть выполнен с возможностью выгрузки содержимого контейнера 301 в специальной зоне птицеводческой фермы.
В случае необходимости, если робот 200 вынужден отступить назад, тогда как яйцо удерживается заблокированным между двумя смежными захватными дисками 302, удерживающий палец 305 не дает яйцу упасть на пол.
Захватные диски 302 могут быть расположены параллельно траектории робота 200 или ориентированы под одним или несколькими заранее определенными углами, позволяющими обрабатывать более значительную площадь сбора.
Захватные диски 302 могут приводиться во вращение механическим или электрическим способом. Их скорость, а также направление их вращения можно регулировать независимо от скорости движения робота 200.
Другие аспекты и функции
В дополнение к своей функции обучения птиц робот 200 может также обеспечивать другие функции внутри жилой зоны 110.
Так, робот 200 содержит механические средства 250 разравнивания и аэрации пола жилой зоны 110 и, в частности, подстилки, например, с применением граблей или бороны.
Действительно, неровности пола могут образовать зоны, воспринимаемые птицами как зоны укрытия, в частности, в углах жилой зоны 110, что может побудить птиц нести яйца в этих зонах укрытия, а не в гнездах.
Механические средства 250 разравнивания и аэрации пола могут быть:
- встроены в робот 200 (то есть могут быть неразъемно закреплены под шасси или на задней части шасси),
- или независимыми от робота 200 (то есть могут быть реверсивно закреплены на роботе, чтобы их можно было снимать) и, например, могут быть прицеплены к роботу 200.
Таким образом, в этой прицепной версии робот 200 можно использовать для установки различных съемных инструментов и для применения системы распознавания прицепного инструмента (например, бесконтактного типа с применением радиочастотного чипа RFID). Это позволяет роботу 200 распознавать инструмент, который он буксирует, и, следовательно, при необходимости адаптировать свою программу (траектория, скорость).
Эти механические средства 250 включают в себя средства позиционирования инструмента разравнивания и аэрации пола. Эти средства позиционирования, которые являются ручными или механизированными, содержат ось или кулису, позволяющую им переходить из активного положения, в котором они входят в контакт с полом (подстилкой), в неактивное положение, в котором они находятся на расстоянии от пола (во время осуществления маневра или цикла без обработки подстилки) и наоборот.
На фиг. 5А и 5В представлены виды в перспективе и сверху мобильного робота согласно первому варианту осуществления изобретения с применением механических средств 250 разравнивания и аэрации пола первого типа.
Робот 200 содержит главное шасси 201 с четырьмя колесами 210, установленными по бокам шасси 201.
В данном случае механические средства 250 разравнивания и аэрации пола являются прицепными и установлены на вспомогательном шасси 201’, с каждой стороны которого установлено колесо 210’. В частности, вспомогательное шасси 201’ является съемным и соединено через шарнирное соединение 254 с главным шасси 201 робота 200.
Механические средства 250 разравнивания и аэрации пола (в частности, подстилки) выполнены в данном случае в виде колес с зубьями 251, которые установлены с промежутками на вращающейся оси 252.
Вращающаяся ось 252 приводится во вращение на своих двух концах приводными средствами 253, содержащими шестерни, взаимодействующие с зубчатым ремнем.
Следует отметить, что именно движение задних колес 210 робота 200 приводит во вращение вращающуюся ось 252 и, следовательно, колеса с зубьями 251.
На фиг. 6А и 6В представлены виды в перспективе и сверху мобильного робота согласно второму варианту осуществления изобретения с применением механических средств 250 разравнивания и аэрации пола второго типа.
Робот 200 содержит шасси 201 с четырьмя колесами 210, установленными по бокам шасси 201.
В данном случае механические средства 250 разравнивания и аэрации пола (в частности, подстилки) установлены на шасси и выполнены в виде зубьев 255, которые установлены с промежутками на кронштейне 256. Этот кронштейн выполнен с возможностью поворота на шасси 201 и приводится в движение вручную или от моторизованного привода при помощи домкрата 257, установленного на шасси 201.
На фиг. 6А кронштейн 256 находится в поднятом (или неактивном) положении, а на фиг. 6В кронштейн 256 находится в «рабочем» положении, в котором зубья 255 входят в контакт с полом.
Кроме того, робот 200 может содержать измерительный модуль 240, включающий в себя один или несколько датчиков 241 измерения параметров окружающей среды здания 100 птицеводческой фермы и один или несколько датчиков 242 измерения физиологических параметров птиц.
В частности, датчики 241 измерения параметров окружающей среды предназначены для измерения температуры, давления, влажности, а также содержания аммиака и диоксида углерода.
Предпочтительно параметры окружающей среды измеряют на высоте робота 200, то есть относительно близко к полу, и в разных местах жилой зоны 110.
Это позволяет получать относительно точную картографию в реальном времени различных параметров окружающей среды внутри жилой зоны 110 на основании данных геолокализации, выдаваемых средствами 284 геолокализации.
Датчики 242 измерения физиологических параметров птиц, таких как температура тела, могут включать в себя инфракрасный термометр. Это позволяет обнаруживать или подтверждать, например, присутствие мертвой птицы.
Робот 200 может дополнительно содержать модуль 260 считывания, содержащий съемочный аппарат 261, такой как видеокамера или фотоаппарат, и микрофон 262.
Собираемые визуальные и звуковые данные позволяют, в частности, обнаруживать возможные аномалии в здании 100 птицеводческой фермы или в поведении птиц. В частности, они позволяют обнаруживать присутствие мертвых птиц и/или яиц на полу.
Параметры, измеряемые измерительным модулем 240, и визуальные и звуковые данные, собираемые при помощи модуля 260 считывания, можно сохранять в запоминающем устройстве 272 робота 200 и передавать при помощи средств 290А беспроводной связи, находящихся на роботе 200, в средства 290В беспроводной связи, находящиеся в помещении, затем их может интерпретировать человек (например, фермер или ветеринар).
В альтернативном варианте интерпретацию параметров, измеряемых измерительным модулем 240, и визуальных и звуковых данных, собираемых при помощи модуля 260 считывания, можно осуществлять при помощи средств 279 обработки робота, в которых применяют, в частности, третий микропроцессор 273 и второе запоминающее устройство 272.
Третий микропроцессор 271 использует один или несколько алгоритмов управления измерительным модулем 240 и модулем 260 считывания для сбора и обработки измеряемых параметров и собираемых визуальных и звуковых данных, что позволяет ему:
- обнаруживать аномалии в измеренных параметрах (например, когда измеренные значения выходят за пределы заранее определенных интервалов значений) и/или
- выдавать картографии мертвых птиц и/или яиц на полу, и
- генерировать тревожный сигнал в случае обнаружения ненормальной ситуации (подозрение на эпидемию, болезнь, нарушение в работе оборудования фермы…), который передается в помещение 140, затем интерпретируется (подтверждается или нет) человеком.
Кроме того, робот 200 может быть выполнен с возможностью распределять кукурузные зерна во время своих перемещений в жилой зоне 110, чтобы облегчить работу фермера и чтобы птицы участвовали в уходе за полом.
В зависимости от площади жилой зоны 110 в этой жилой зоне можно использовать несколько заявленных роботов 200, чтобы беспокоить птиц с частотностью, позволяющей улучшить их яйценоскость и сократить яйцекладку на полу.
Заявленный робот является компактным и имеет, например, высоту 20 см, что позволяет ему перемещаться, в частности, под системами питания (кормушками, поилками…).
Его можно использовать на любой птицеводческой ферме (разведение птиц, кур, индюков, гусей, уток) открытого или закрытого типа.
В варианте робот 200 может быть оснащен устройством ночного видения, таким как тепловая камера (называемая также инфракрасной камерой), чтобы обнаруживать присутствие возможных хищников в случае разведения птиц на открытой ферме. Визуальные данные, собираемые тепловой камерой в ночное время, могут быть сохранены в запоминающем устройстве 272 и переданы при помощи средств 290А беспроводной связи, находящихся на роботе 200, в средства 290В беспроводной связи, находящиеся в помещении 140. Эти данные может интерпретировать человек (фермер или ветеринар) или сам робот 200 при помощи алгоритма распознавания форм, исполняемого третьим микропроцессором 271.
В случае обнаружения роботом 200 хищника фермеру или ветеринару, находящемуся в помещении 140, передается тревожный сигнал при помощи средств 290А, 290В связи.
В частном варианте осуществления, когда уровень зарядки батарей 203 робота становится ниже заранее определенного порога, в помещение 140 при помощи средств 290А связи передается тревожный сигнал, чтобы предупредить фермера или ветеринара о необходимости подзарядки батарей 203.
В варианте средства 280 направления и навигации могут быть запрограммированы таким образом, чтобы направить робот к зарядному посту, находящемуся в здании 100 птицеводческой фермы, когда уровень зарядки батарей становится ниже заранее определенного порога. После подзарядки батарей 203 робот 200 может продолжать свой путь вдоль траектории 130.
Траекторию 130 робота 200 может заранее программировать человек при помощи средств 270 обработки. Робот 200 следует этой траектории 130 по мере возможности, за исключением случая обнаружения подвижного или неподвижного препятствия, который он обходит, после чего возобновляет свой путь вдоль траектории 130.
В частности, человек может изменять эту траекторию 130 дистанционно из помещения 140 при помощи средств 290А, 290В связи.
В альтернативном варианте траекторию может изменять и даже полностью определять сам робот 200 в реальном времени при помощи средств 270 обработки, например, в зависимости от визуальных данных, поступающих от средств 260 считывания, которые обнаруживают присутствие одной или нескольких птиц, которые могут быть статичными.
Периодически или по запросу человека робот 200 может передавать хронологию работы, позволяющую осуществлять дистанционное отслеживание работы робота 200 за длительные периоды (например, за сутки или за неделю).
Хронология работы может включать в себя сведения о путях движения робота 200, об измерениях, поступающих от датчиков 241 измерения параметров окружающей среды и датчиков 242 измерения физиологических параметров птиц, о съемках жилой зоны 110 в данные моменты, производимых съемочным аппаратом 261, картографию мертвых птиц и/или яиц на полу, отчет о переданных тревожных сигналах, а также хронологию уровня зарядки батарей 203 робота 200.
Можно предусмотреть единый микропроцессор, а также единое запоминающее устройство для обеспечения осуществления функции трех микропроцессоров 231, 271, 285 и трех запоминающих устройств 232, 272, 286 соответственно. В этом случае сигналы датчиков поступают в единый микропроцессор, который на основании принятых сигналов управляет одновременно движениями колес робота, средствами побуждения к мобильности, модулем измерения и модулем считывания.
Средства 284 геолокализации робота 200 позволяют определять точное положение робота 200 внутри жилой зоны 110 и убеждаться, что траектория робота 200 максимально точно следует запрограммированной теоретической траектории. Это позволяет также получать при реализации картографии точное положение мертвых птиц и/или яиц на полу и/или параметры окружающей среды.
Предпочтительно диски 302 модуля 300 сбора яиц выполнены из мягкого материала, в частности, из металла (в случае необходимости, они выполнены перфорированными для ограничения их жесткости), и покрыты или нет пластиком или эластомером, или выполнены из пластика, покрытого или нет эластомером.
Использование мягких материалов позволяет гарантировать структурную целостность яйца независимо от его размера.
В частном варианте осуществления модуля 300 сбора яиц контейнер 301 находится спереди модуля 300. В этом случае выталкивающие пальцы 306 необходимо расположить спереди дисков 302.
В варианте моно также оснастить модуль 300 сбора яиц датчиком, чтобы обнаруживать присутствие яиц в контейнере 301 и определять, что он может вместить еще одно или несколько дополнительных яиц или что робот 200 должен переместиться к месту опорожнения контейнера 301.
Можно также предусмотреть один или несколько датчиков для обнаружения яиц между дисками и/или на полу и/или в контейнере.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ САНИТАРНОЙ ОБРАБОТКИ ОБЪЕКТОВ ПТИЦЕВОДЧЕСКОГО ХОЗЯЙСТВА | 2020 |
|
RU2749583C1 |
| Взвешивающий модуль для гнезда в птицеводческом хозяйстве и гнездо | 2017 |
|
RU2769467C2 |
| Способ дезинвазии против экзогенной стадии развития яиц аскаридий птиц | 2021 |
|
RU2787391C2 |
| СПОСОБ МОЙКИ И САНИТАРНОЙ ОБРАБОТКИ ЯИЦ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПТИЦ | 2005 |
|
RU2322803C2 |
| АВТОМАТИЗИРОВАННОЕ НЕИНВАЗИВНОЕ ОПРЕДЕЛЕНИЕ ОПЛОДОТВОРЕНИЯ ЯЙЦА ПТИЦЫ | 2018 |
|
RU2739896C1 |
| ПРИМЕНЕНИЕ ГАЗООБРАЗНОГО БЕЗВОДНОГО ПЕРОКСИДА ВОДОРОДА (DHP) В СПОСОБАХ ПРОИЗВОДСТВА ПТИЦЫ | 2018 |
|
RU2763321C2 |
| СПОСОБ И СИСТЕМА ЗАХВАТА ОБЪЕКТОВ С ПОМОЩЬЮ РОБОТИЗИРОВАННОГО УСТРОЙСТВА | 2020 |
|
RU2745380C1 |
| ЖИЛИЩНО-ПРОИЗВОДСТВЕННАЯ ВЕРТИКАЛЬНАЯ ФЕРМА | 2010 |
|
RU2436917C1 |
| ПРИМЕНЕНИЕ ИЗОКСАЗОЛИНОВЫХ СОЕДИНЕНИЙ НА ДОМАШНЕЙ ПТИЦЕ | 2014 |
|
RU2796536C2 |
| ЖИВОТНОВОДЧЕСКАЯ ФЕРМА | 1991 |
|
RU2029463C1 |





Группа изобретений относится к области птицеводства, в частности к мобильному роботу для птицеводческих ферм, а также к установке для пятицеводческой фермы, в которой используют один или несколько таких роботов. Мобильный обучающий робот предназначен для птицеводческой фермы, содержащей по меньшей мере одну зону откладывания яиц. Робот содержит средства перемещения робота по полу и средства побуждения к подвижности по меньшей мере двух разных типов, выполненные с возможностью выдавать стимулы разной природы для принудительного перемещения сидящих на полу птиц по меньшей мере в одну зону откладывания яиц. Также робот содержит средства управления указанными средствами побуждения к подвижности и механические средства разравнивания и аэрации пола. Обеспечиваемый при этом технический результат заключается в обучении птиц яйцекладке только в гнездах за счет предотвращения яйцекладки на полу, а также в улучшении яйценоскости птиц на птицеводческой ферме. 2 н. и 15 з.п. ф-лы, 8 ил.
1. Мобильный обучающий робот (200) для птицеводческой фермы (100), содержащей по меньшей мере одну зону (120) откладывания яиц, при этом указанный робот (200) содержит:
- средства перемещения робота по полу,
- средства (220) побуждения к подвижности по меньшей мере двух разных типов, выполненные с возможностью выдавать стимулы разной природы для принудительного перемещения сидящих на полу птиц по меньшей мере в одну зону (120) откладывания яиц,
- средства (230) управления указанными средствами (220) побуждения к подвижности и
- механические средства (250) разравнивания и аэрации пола.
2. Робот (200) по п. 1, отличающийся тем, что содержит модуль (300) сбора яиц с пола.
3. Робот (200) по п. 2, отличающийся тем, что указанный модуль (300) сбора яиц с пола содержит множество коаксиально расположенных дисков (302) для захвата яиц с пола.
4. Робот (200) по п. 3, отличающийся тем, что диски (302) являются механизированными и выполнены с возможностью нахождения на расстоянии от пола.
5. Робот (200) по п. 3 или 4, отличающийся тем, что указанный модуль (300) сбора яиц с пола содержит элементы (304) для направления яиц к указанным захватным дискам (302).
6. Робот (200) по одному из пп. 2-5, отличающийся тем, что указанный модуль (300) сбора яиц на полу содержит контейнер (301) для сбора яиц, имеющий наклонную стенку (301А) дна.
7. Робот (200) по п. 6, отличающийся тем, что между двумя смежными захватными дисками (302) указанный модуль (300) сбора яиц с пола содержит по меньшей мере один выталкивающий палец (306) для извлечения яйца, находящегося между двумя захватными дисками (302), и для его направления в указанный контейнер (301).
8. Робот (200) по одному из пп. 3-7, отличающийся тем, что между двумя смежными захватными дисками (302) указанный модуль (300) сбора яиц с пола содержит по меньшей мере один палец (305) для удержания яйца между двумя захватными дисками (302).
9. Робот (200) по одному из пп. 1-8, отличающийся тем, что указанные средства (220) побуждения к подвижности выбраны из группы, в которую входят:
- по меньшей мере один источник (221) звука;
- по меньшей мере один источник (222) света;
- по меньшей мере один подвижный механический элемент (223);
- по меньшей мере одно электроразрядное устройство (224).
10. Робот (200) по одному из пп. 1-9, отличающийся тем, что указанные средства (230) управления выполнены с возможностью активировать указанные средства (220) побуждения к подвижности по меньшей мере двух разных типов одно за другим или одновременно.
11. Робот (200) по одному из пп. 1-10, отличающийся тем, что содержит средства (284) геолокализации робота (200).
12. Робот (200) по одному из пп. 1-11, отличающийся тем, что содержит датчики (241) измерения параметров окружающей среды указанной птицеводческой фермы (100).
13. Робот (200) по одному из пп. 1-12, отличающийся тем, что содержит датчики (242) измерения физиологических параметров птиц указанной птицеводческой фермы (100), таких как температура тела.
14. Робот (200) по одному из пп. 1-13, отличающийся тем, что содержит датчики (260) сбора визуальных и/или звуковых данных.
15. Робот (200) по п. 14, отличающийся тем, что содержит средства (270) обработки по меньшей мере одного среди:
- измеряемых параметров окружающей среды,
- собираемых визуальных данных и
- собираемых звуковых данных,
при этом средства (270) обработки выполнены с возможностью выдавать картографию мертвых птиц и/или откладываемых на полу яиц.
16. Робот (200) по п. 15, отличающийся тем, что средства (270) обработки выполнены с возможностью выдавать картографию параметров окружающей среды указанной птицеводческой фермы (100) в зависимости от измеренных параметров окружающей среды.
17. Установка птицеводческой фермы, содержащая по меньшей мере один робот (200) по одному из пп. 1-16.
| WO 2014141313 A2, 18.09.2014 | |||
| WO 2015105776 A1, 16.07.2015 | |||
| US 6439162 B1, 27.08.2002 | |||
| US 2005217589 A1, 06.10.2005 | |||
| US 4304194 A1, 08.12.1981 | |||
| CN 104621004 A, 20.05.2015. |

