Изобретение относится к измерительной технике, а именно к датчикам для измерения угла поворота бесконтактным способом, и может быть использовано в системах управления подвижными объектами.
Работа датчика для измерения угла поворота бесконтактным способом основана на анизотропном магниторезистивном эффекте (АМР-эффекте) в тонких магнитных пленках сплава Fe-Ni (или Fe-Ni-Co).
В качестве чувствительного элемента датчика используются два моста Уинстона, расположенные под углом 45°. Плечи мостов Уинстона выполнены в виде меандров, состоящих из заостренных магниторезистивных полосок, соединенных по концам электропроводящими перемычками.
Типичная топология чувствительного элемента, используемая в серийных датчиках KMZ43T ф. Phillips [KMZ43 Magnetic field sensor, Objective specification, Data sheet, 2000 Aug 24] и HMC 1512 ф. Honeywell [HMC1501/1512 Magnetic Displacement Sensors, Data sheet Honeywell] такова, что магниторезистивные полоски в одном плече перпендикулярны магниторезистивным полоскам в соседнем плече. Это обстоятельство позволяет получить выходное напряжение при приложении внешнего магнитного поля вследствие разной величины поперечного и продольного анизотропного магниторезистивного эффекта.
С другой стороны, при больших полях (угловые датчики работают в состоянии магнитного насыщения магниторезистивного материала полосок) возникают размагничивающие поля, разные для продольного и поперечного по отношению к магниторезистивной полоске направления прикладываемого рабочего поля, что приводит к дополнительному разбалансу выходного напряжения моста Уинстона.
По данным Р. Суху («Магнитные тонкие пленки», Издательство «Мир», Москва, 1967 стр. 394), размагничивающее поле для образца с соотношением сторон 2:1 по короткой стороне в два раза больше, чем по длинной. У применяемых на практике магниторезистивных полосок эта разница существенно больше (отношение длины к ширине 28:1, например), что естественно приводит к разнице сопротивлений плеч, т.е. к разбалансу моста Уинстона и, соответственно, снижению точности измерения угла поворота датчика.
Условием, при котором размагничивающие поля не будут влиять на разбаланс моста, является полное геометрическое подобие плеч и их одинаковая ориентация по отношению к прилагаемому магнитному полю. Это условие выполняется в магниторезистивных мостах фирмы Honeywell, предназначенных для измерения малых (±100 мкТл) величин магнитного поля в датчиках с линейной характеристикой выходных напряжений от величины магнитного поля [V(H)]. Все плечи моста состоят из одинаковых магниторезистивных полосок, параллельных во всем мосте Уинстона. Для получения выходного сигнала используется смещение выходной характеристики за счет применения полюсов Барбера. В патентах США №5247278 от 21.09.1993 и №5952825 от 14.09.1999 полюса Барбера расположены под углом «плюс» 45° к длинной стороне полоски в двух смежных плечах моста и под углом «минус» 45° в двух других смежных плечах моста. Аналогичное расположение полюсов Барбера представлено в патенте РФ №2347302 C1, H01L 43/08 Магниторезистивный датчик / В.К. Гусев, А.В. Негин / Бюллетень №5 - 2009.
Применение вышеуказанных мостов, используемых в линейных датчиках, в угловых датчиках неизвестно.
В патенте РФ №2664868 C1, H01L 43/08. Способ балансировки магниторезистивного датчика / В.К. Гусев, А.В. Негин / Бюллетень №24 - 2018 приведена конструкция магниторезистивного углового датчика, взятого за прототип. Датчик содержит два моста Уинстона с перпендикулярным направлением магниторезистивных полосок в соседних (смежных) плечах моста. Балансировку такого датчика проводят при приложении поля насыщения, замеряя значения выходного напряжения моста Уинстона при двух взаимно перпендикулярных направлениях магнитного поля, при которых выходное напряжение имеет максимальное и минимальное значения, и добиваются равенства этих значений по абсолютной величине, увеличивая сопротивление плеч моста Уинстона за счет подгоночных сопротивлений.
К недостаткам прототипа следует отнести следующее.
Сложность процесса балансировки датчика, т.к. трудно совместить в одном месте лазер, измерительную технику и организовать магнитное поле чисто конструктивно. Кроме того магнитное поле может влиять на используемую аппаратуру, что приводит к заметному снижению точности балансировки. Поэтому зачастую проводят подгонку без магнитного поля, а затем проводят замеры в магнитном поле и так несколько раз, чтобы достигнуть желаемого результата.
Размагничивающее поле зависит от приложенного внешнего поля даже в случае насыщения за счет второго члена в следующей формуле для поля в образце:
В=J+μН,
где: В - магнитная индукция;
J - намагниченность;
μ - магнитная проницаемость;
Н - прикладываемое поле;
Поэтому, необходимо эксплуатировать датчик в таком поле, в котором проводилась балансировка, что не всегда технически возможно и приводит к ошибкам в измерении угла поворота.
Техническим результатом предлагаемого решения является повышение точности измерения угла поворота, помехозащищенности датчика и упрощение процесса балансировки датчика.
Технический результат достигается тем, что магниторезистивный датчик угла поворота содержит тонкопленочный чувствительный элемент, выполненный в виде двух мостов Уинстона, расположенных под углом 45° друг к другу, плечи которых представляют меандры из заостренных магниторезистивных полосок, соединенных по концам проводящими перемычками, и подгоночные сопротивления. Магниторезистивные полоски во всех плечах моста расположены параллельно друг другу и содержат полюса Барбера, расположенные под углом «плюс» 45° относительно длинной стороны полоски в двух противоположных плечах моста и «минус» 45° в двух других противоположных плечах моста.
Кроме того магниторезистивные полоски в плече могут иметь различную длину, но при этом плечи мостов Уинстона должны быть одинаковыми.
Кроме того магниторезистивные полоски должны иметь удельное поверхностное сопротивление (4-6)  , предпочтительнее 5 , где - Ом на квадрат.
, предпочтительнее 5 , где - Ом на квадрат.
Изобретение поясняется следующими фигурами.
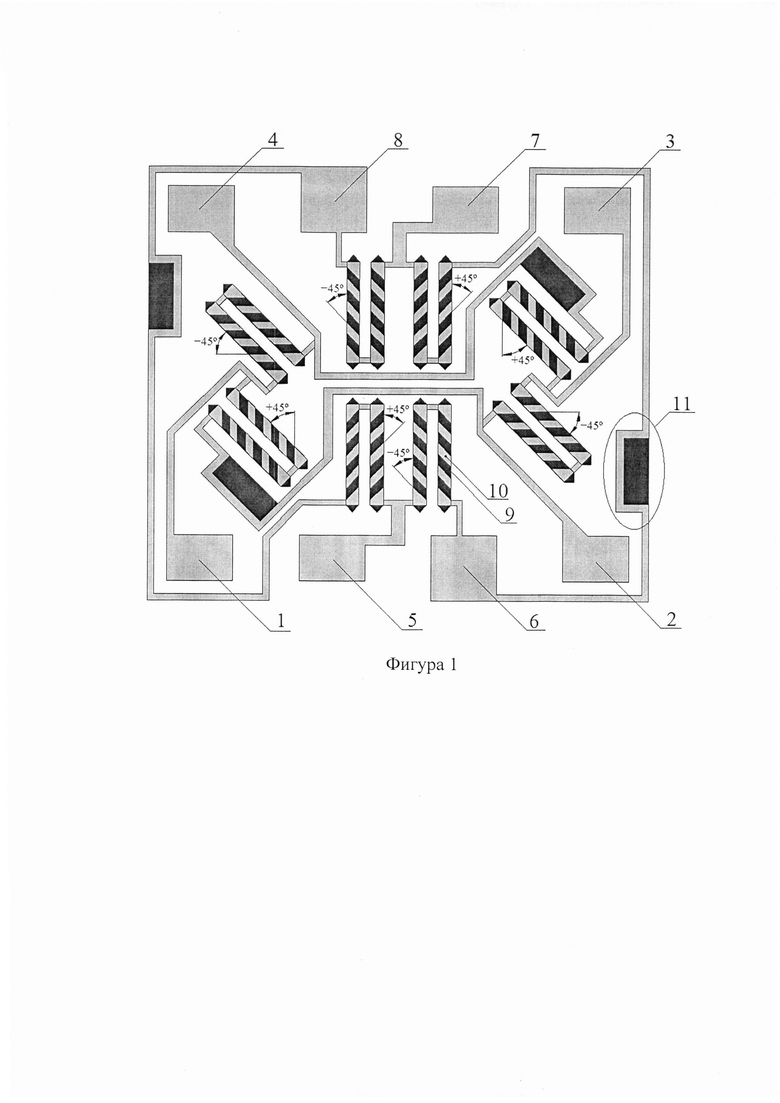
На фигуре 1 схематически представлена топология чувствительного элемента датчика, представляющая два моста Уинстона, расположенных под углом 45° друг к другу и имеющих общий центр симметрии с изображением магниторезистивных полосок и полюсов Барбера (ПБ) в мостах Уинстона.
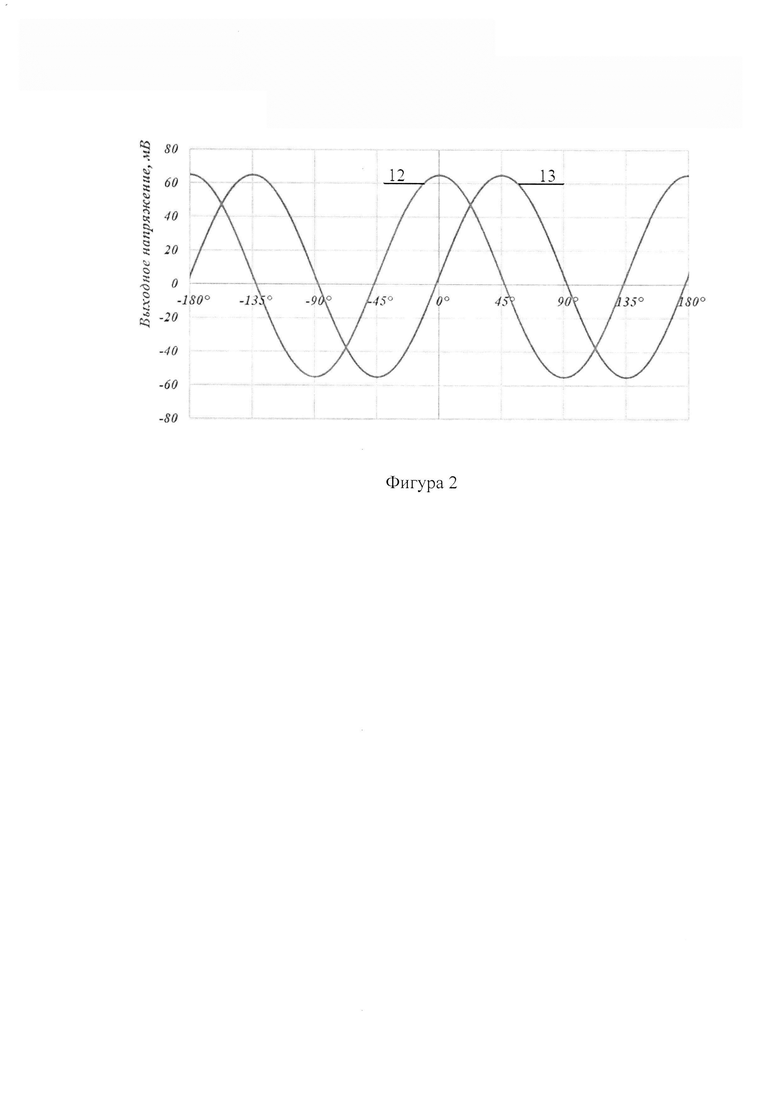
На фигуре 2 представлена угловая зависимость выходного сигнала датчика.
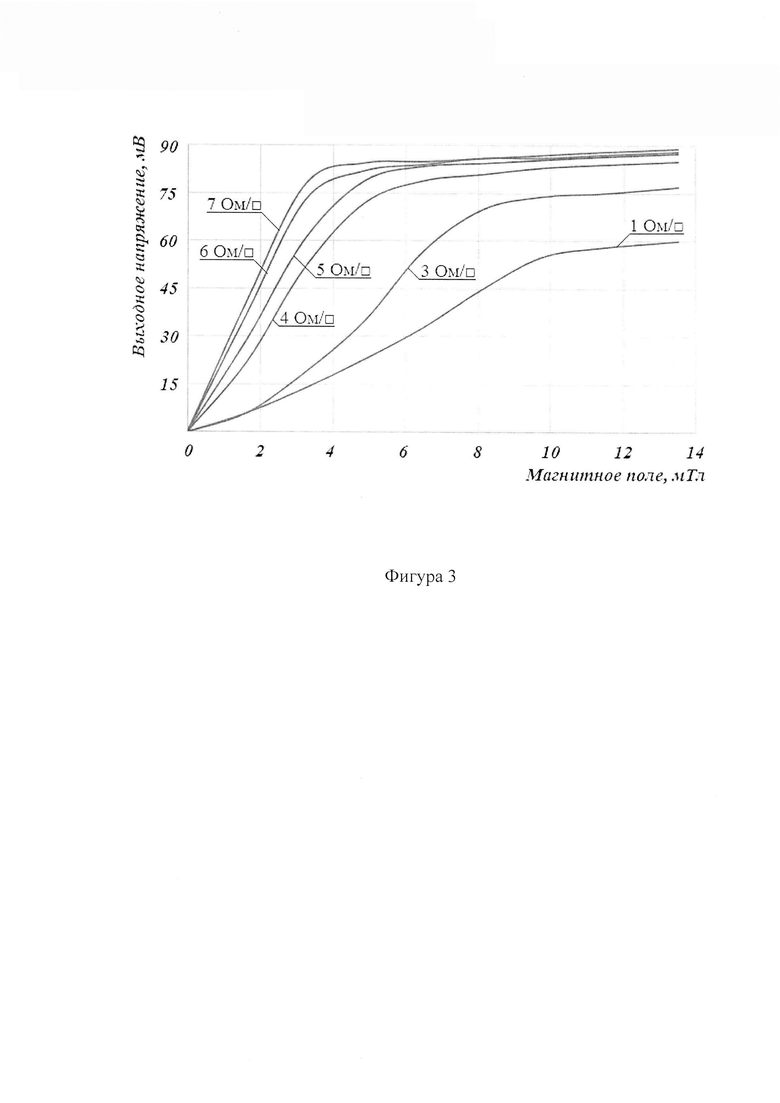
На фигуре 3 представлена зависимость выходного сигнала от величины внешнего магнитного поля при разном удельном поверхностном сопротивлении магниторезистивного материала.
На фигуре 1 приняты следующие обозначения:
1, 2, 3, 4 - контактные площадки (КП) первого моста Уинстона.
5, 6, 7, 8 - контактные площадки второго моста Уинстона;
9 - магниторезистивные полоски;
10 - полюса Барбера;
11 - подгоночные сопротивления.
На фигуре 2 приняты следующие обозначения:
12 - угловая зависимость выходного напряжения первого моста Уинстона;
13 - угловая зависимость выходного напряжения второго моста Уинстона;
Магниторезистивный датчик угла поворота, содержащий тонкопленочный чувствительный элемент, топология которого приведена на фиг. 1, выполнен в виде двух мостов Уинстона, расположенных под углом 45° относительно друг друга, плечи которых представляют меандры из заостренных магниторезистивных полосок 9 с удельным поверхностным сопротивлением магниторезистивного материала от 4 до 6 , предпочтительнее 5 .
Магниторезистивные полоски 9 во всех плечах каждого из мостов расположены параллельно друг другу, и содержат ПБ 10, расположенные под углом «плюс» 45° и «минус» 45° относительно длинной стороны магниторезистивной полоски в двух противоположных плечах моста. Магниторезистивные полоски могут быть одинаковой длины, разной длины, вписанные в область прямоугольника, треугольника, круга и т.д., но при этом, плечи в мостах Уинстона должны быть одинаковыми.
Для определения угла поворота бесконтактным методом используются зависимости выходных напряжений мостов Уинстона от направления внешнего магнитного поля. При этом должно выполняться условие - величина внешнего магнитного поля должна быть не меньше, чем поле насыщения магниторезистивных полосок. Вследствие того, что первый мост имеет косинусную зависимость 12 выходного напряжения от угла поворота относительно направления магнитного поля, а второй мост - синусную 13 (фиг. 2), искомый угол α определяется по формуле:

Предлагаемый магниторезистивный датчик поясняется следующим примером.
Образцы чувствительных элементов были изготовлены методом, описанным в патенте РФ №2617454 CI H01L 43/12. Способ изготовления магниторезистивного датчика / В.К. Гусев, А.В. Негин, Т.Г. Андреева, С.В. Горохов / Бюллетень №12 - 2017 на структурах Ni(65%)Fe(15%)Co(20%) - Ta-Cu-Ni(65%)Fe(15%)Co(20%) и Ni(65%)Fe(15%)Co(20%) - Ta-Al, которые получали электронно-лучевым напылением за один цикл откачки. Магниторезистивные полоски были изготовлены из структуры Ni(65%)Fe(15%)Co(20%) - Ta, а перемычки, ПБ и КП - из Al или структуры -Cu-Ni(65%)Fe(15%)Co(20%) методом фотолитографического травления.
С целью определения оптимального значения поля насыщения магниторезистивной пленки, были исследованы зависимости выходного напряжения моста Уинстона от прикладываемого внешнего магнитного поля (фиг. 3) для различных толщин магниторезистивного слоя. Вследствие малых значений толщины магниторезистивной пленки (десятки нм) и трудоемкостью их определения на электронном микроскопе, практически замерялось удельное поверхностное сопротивление, которое находится в прямой зависимости от толщины. Поле насыщения определялось как минимальное значение магнитного поля, при котором выходное напряжение практически не изменялось.
В результате исследований была выбрана магниторезистивная пленка с удельным поверхностным сопротивлением 5 . Данная пленка переходит в состояние магнитного насыщения при поле 5-6 мТл, что позволяет исключить помехи от полей меньшей величины (например, от полей электродвигателя). Образцы с меньшим поверхностным сопротивлением (менее 4 ) имеют более низкое сопротивление мостов Уинстона, а, следовательно, повышенное энергопотребление и более низкое выходное напряжение. Образцы с большим поверхностным сопротивлением (более 6 ) имеют более низкое поле насыщения, что не исключает влияния помех, а следовательно снижает точность определения угла поворота (фиг. 3).
Балансировку датчика осуществляли следующим образом.
Подложку с чувствительными элементами устанавливали на столик лазерной установки, имеющий контактные щупы для измерения электрических параметров.
На контактные площадки 1, 2, 3, 4 первого моста (фиг. 1) устанавливали контактные щупы. На контактные площадки 2, 4 подавалось стабилизированное напряжение питания +5 В от источника (типа Б5-47), а с контактных площадок 1, 3 снималось выходное напряжение с помощью цифрового вольтметра (типа В7-38).
Для устранения технологического разбаланса часть подгоночных сопротивлений плеч моста удалялась лазерным лучом с контролем выходного напряжения. Мост считался сбалансированным когда выходное напряжение не превышало ±2 мВ, что соответствует ~2% от полного размаха выходного сигнала (фиг. 2).
Балансировка проводилась без приложения внешнего магнитного поля, исключая режим насыщения магниторезистивного материала (практически в магнитном поле Земли ~(30-60) мкТл), что существенно упростило проведение данного процесса.
Аналогичным способом балансируется и второй мост.
В связи с геометрическим тождеством плеч и их одинаковым расположением относительно направления внешнего магнитного поля, размагничивающие поля одинаковы во всех плечах моста, а поэтому дополнительного вклада в разбаланс они генерировать не могут. Особенно ценно то, что такая ситуация будет существовать при любой величине внешнего магнитного поля, а поэтому балансировка оказалась возможной в поле Земли, без экранировки.
Проведенные исследования показали, что точность определения угла поворота находится на уровне сотых долей градуса, что подтверждает отсутствие влияния магнитных помех (до 7 мТл) на результаты измерений.
Таким образом, разработка новой топологии чувствительного элемента позволила устранить недостатки, присущие прототипу, а именно исключить влияние размагничивающих полей на балансировку датчика, что существенно упрощает процесс балансировки, позволила работать с любыми магнитами, поля которых превышают поля насыщения, а определение необходимого удельного поверхностного сопротивления магниторезистивной пленки позволило увеличить помехозащищенность и точность измерения угла поворота датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки магниторезистивного датчика | 2017 |
|
RU2664868C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2007 |
|
RU2347302C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГНИТОРЕЗИСТИВНОГО ДАТЧИКА | 2013 |
|
RU2536317C1 |
| Способ изготовления магниторезистивного датчика | 2016 |
|
RU2617454C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГНИТОРЕЗИСТИВНОГО ДАТЧИКА | 2011 |
|
RU2463688C1 |
| Магниторезистивный датчик магнитного поля | 2019 |
|
RU2738998C1 |
| Способ изготовления магниторезистивного датчика | 2017 |
|
RU2659877C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2010 |
|
RU2436200C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2005 |
|
RU2279737C1 |
| АБСОЛЮТНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2010 |
|
RU2436037C1 |
Изобретение относится к измерительной технике, а именно к датчикам для измерения угла поворота бесконтактным способом, и может быть использовано в системах управления подвижными объектами. Магниторезистивный датчик угла поворота содержит тонкопленочный чувствительный элемент, выполненный в виде двух мостов Уинстона, расположенных под углом 45° друг к другу, плечи которых представляют меандры из заостренных магниторезистивных полосок, соединенных по концам проводящими перемычками, и подгоночные сопротивления. Магниторезистивные полоски во всех плечах моста расположены параллельно друг другу и содержат полюса Барбера, расположенные под углом «плюс» 45° относительно длинной стороны полоски в двух противоположных плечах моста и «минус» 45° в двух других противоположных плечах моста. Технический результат - повышение точности измерения угла поворота, помехозащищенности датчика и упрощение процесса балансировки датчика. 2 з.п. ф-лы, 3 ил.
1. Магниторезистивный датчик угла поворота, содержащий тонкопленочный чувствительный элемент, выполненный в виде двух мостов Уинстона, расположенных под углом 45° друг к другу, плечи которых представляют меандры из заостренных магниторезистивных полосок, соединенных по концам проводящими перемычками, и подгоночные сопротивления, отличающийся тем, что магниторезистивные полоски во всех плечах моста расположены параллельно друг другу и содержат полюса Барбера, расположенные под углом «плюс» 45° относительно длинной стороны полоски в двух противоположных плечах моста и «минус» 45° в двух других противоположных плечах моста.
2. Магниторезистивный датчик угла поворота по п. 1, отличающийся тем, что магниторезистивные полоски в плече могут иметь различную длину, но при этом плечи мостов Уинстона должны быть одинаковыми.
3. Магниторезистивный датчик угла поворота по п. 1, отличающийся тем, что магниторезистивные полоски должны иметь удельное поверхностное сопротивление (4-6)  предпочтительнее 5
предпочтительнее 5 
| Способ балансировки магниторезистивного датчика | 2017 |
|
RU2664868C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2010 |
|
RU2436200C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2014 |
|
RU2561762C1 |
| US 7847542 B2, 07.12.2010 | |||
| DE 102005009923 B4, 24.11.2016. | |||

