Изобретение относится к измерительной технике, а именно к датчикам для измерения угла поворота, основанным на анизотропном магниторезистивном эффекте (АМР-эффекте) в тонких магнитных пленках, и может быть использовано в системах управления подвижными объектами.
В качестве чувствительного элемента датчика используется мост Уинстона, одной из характеристик которого, отрицательно влияющей на точность измерения угла поворота, является разбаланс (смещение) моста.
Известны AMP датчики магнитного поля, описанные в ряде патентов фирмы Honeywell (Muchael 3, Caruso Н. and Tamara Bratland, Honeywell SSES, Carl H. Smith and Robert Schneider, Nonvolatile Electronics, Jnc), http://www sensorsmag.com, которым присуще наличие технологического разбаланса мостовой схемы, содержащей тонкопленочные резисторы.
Технологический разбаланс является следствием того, что процессы вакуумного напыления, фотолитографии и травления пленок не могут обеспечить одинаковую толщину и размер магниторезистивных полосок, что приводит к неравенству сопротивлений плеч моста.
Для устранения разбаланса моста предлагаются разные способы, основанные на использовании схемных решений с введением дополнительных тонкопленочных элементов или электронных компонентов в схеме обработки сигнала (катушек смещения, микропроцессора, электронной обратной связи).
Использование этих способов позволяет устранить разбаланс моста, но имеет ограничение по его величине, усложняет процесс изготовления датчика и отбирает заметную часть питания, что снижает его чувствительность.
Известны технические решения, описанные в патентах РФ №2186440, кл. H01L 43/08 от 16 февраля 2001 г. и №2216822 кл. H01L 43/08 от 9 апреля 2002 г., в которых вместо катушки индуктивности, для той же цели используются управляющие проводники, но эти решения имеют те же недостатки, что и предыдущие.
Более простой способ предложен в патенте РФ №2347302 кл. H01L 43/08 от 11.09.2007 г., взятый нами за прототип.
В этом способе балансировку разомкнутого моста Уинстона осуществляют подключением дискретного ряда одинаковых подгоночных сопротивлений последовательно с плечом моста Уинстона и поочередным лазерным перерезанием перемычек между сопротивлениями, каждый раз увеличивая сопротивление плеча на одну и ту же величину (шаг подгонки) до окончательной балансировки моста.
В приведенном примере показано с какой точностью может быть выполнено заданное сопротивление плеча при шаге подгонки 1 Ом для получения моста в 1000 Ом с равными сопротивлениями плеч.
Этот способ не может быть реализован для замкнутого моста Уинстона, вследствие того, что сопротивления плеч невозможно замерить.
В этом случае разбаланс оценивают по величине напряжения в диагонали моста при отсутствии воздействующего магнитного поля (у сбалансированного моста выходное напряжение - 0 мВ).
Для мостов Уинстона компасного применения с нечетной вольт-эрстедной характеристикой (ВЭХ) и имеющей гистерезис, используют способ, описанный в ChipNews # 3(96), 2005, стр 61-62, заключающийся в том, что магниторезистивные полоски намагничивают в одну сторону и получают смещение моста Uset, а затем в другую - получают смещение Ureset. Искомый разбаланс находится как: (Uset-Ureset)/2, и для балансировки необходимо выполнение условия Uset=Ureset. Балансировка такого моста с помощью подгоночных сопротивлений не вызывает затруднений.
Основным недостатком всех перечисленных способов является невозможность их применения для балансировки углового магниторезистивного датчика.
Особенностью угловых датчиков является то, что они работают в состоянии насыщения при полях до 10 мТл и сбалансированность моста для работы в области малых полей не обеспечивает сбалансированности моста в рабочем состоянии датчика вследствие большой величины размагничивающих полей. Так Р. Суху в книге «Магнитные тонкие пленки», Издательство «Мир», Москва, 1967 стр 394, приводит пример для размагничивающих полей по длинной и короткой стороне прямоугольного образца с соотношением сторон 2:1. Размагничивающее поле по короткой стороне оказалось в два раза больше, чем по длинной. У применяемых на практике магниторезистивных полосок эта разница еще больше, что естественно приводит к разнице сопротивлений плеч, т.е. разбалансу моста и, соответственно, снижению характеристик датчика.
Техническим результатом предлагаемого решения является способ балансировки углового магниторезистивного датчика.
Указанный технический результат достигается тем, что в способе балансировки магниторезистивного датчика, включающем подключение дискретного ряда одинаковых подгоночных сопротивлений последовательно с плечами моста Уинстона и балансировку моста Уинстона путем увеличения сопротивлений плеч моста Уинстона последовательным лазерным перерезанием перемычек соответствующих подгоночных сопротивлений, сначала на включенный мост Уинстона подают магнитное поле величиной не менее поля насыщения магниторезистивного материала датчика, затем замеряют значения выходного напряжения моста Уинстона при двух взаимно перпендикулярных направлениях магнитного поля, при которых выходное напряжение имеет максимальное и минимальное значения и добиваются равенства этих значений по абсолютной величине, увеличивая сопротивления плеч моста Уинстона.
Пример реализации способа
На фиг. 1 представлена топология датчика, состоящего из 2-х мостов Уинстона, имеющих общий центр симметрии (условное название «Ромашка»).
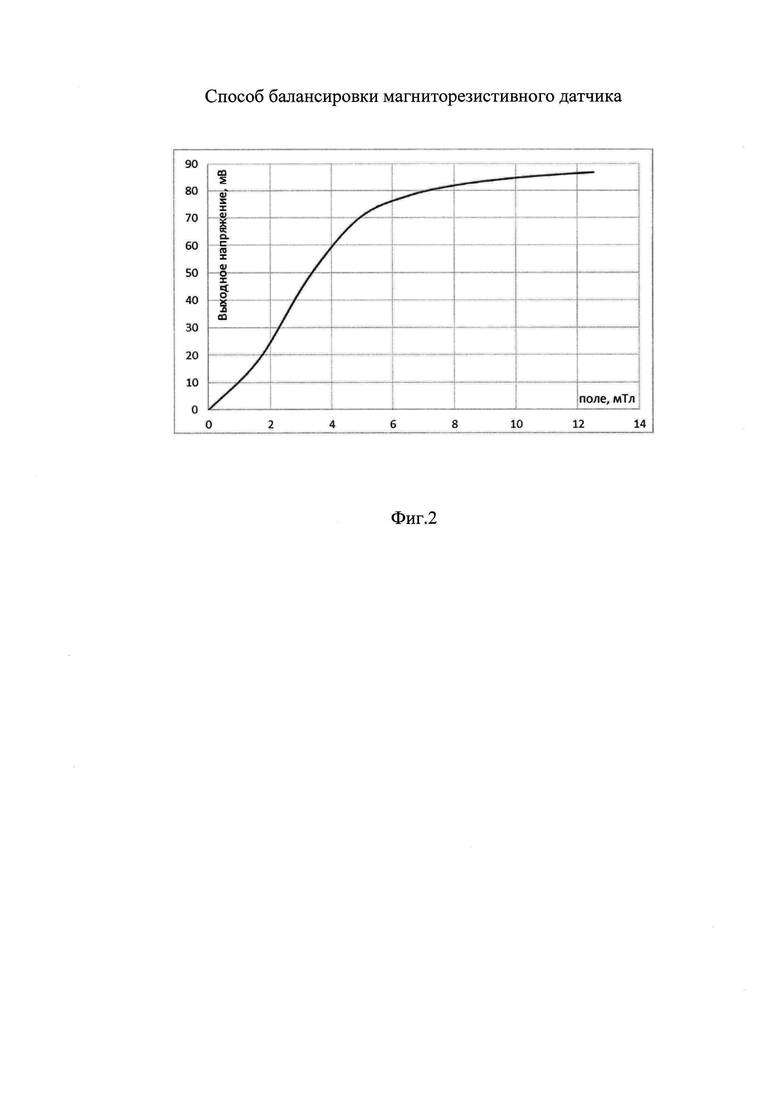
На фиг. 2 представлена зависимость выходного напряжения датчика от величины прикладываемого магнитного поля.
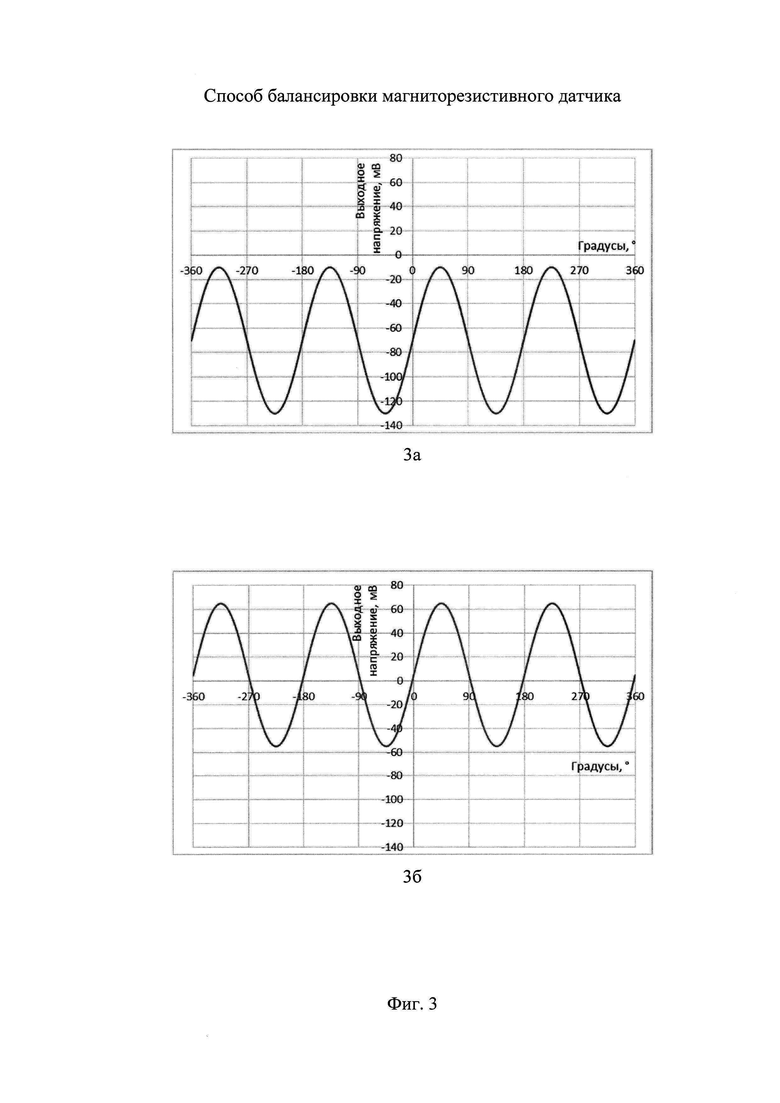
На фиг. 3а представлена зависимость выходного напряжения моста Уинстона от угла поворота до балансировки.
На фиг. 3б представлена зависимость выходного напряжения моста Уинстона от угла поворота после балансировки.
На фиг. 1:
1 - контактная площадка 1-го моста Уинстона (условное обозначение «мост 0°», у него два плеча параллельны, а два плеча перпендикулярны оси легкого намагничивания);
2 - контактная площадка 2-го моста Уинстона (условное обозначение «мост 45°», который повернут на 45° относительно первого моста);
3 - контактная площадка «моста 0°»;
4 -контактная площадка «моста 45°»;
5 - контактная площадка «моста 45°»;
6 - контактная площадка «моста 0°»;
7 - контактная площадка «моста 45°»;
8 - контактная площадка «моста 0°»;
9 - магниторезистивные полоски;
10 - сопротивление грубой подгонки;
11 - сопротивление тонкой подгонки.
Стрелкой обозначено направление оси легкого намагничивания (ОЛН), которое формировалось во время напыления пленки в вакууме при приложении вдоль поверхности подложки магнитного поля величиной 16 мТл.
Балансировку датчика проводят следующим образом. Сначала на тестовом образце снимают зависимость выходного напряжения моста Уинстона от величины прикладываемого перпендикулярно ОЛН магнитного поля. Для этого использовали соленоид на 2000 витков, который при токе 0,77 А позволяет получать однородное магнитное поле по оси соленоида величиной 12,5 мТл.
Из фиг. 2 видно, что 5 мТл достаточно для полного намагничивания образца.
Для балансировки «моста 0°» подложку устанавливают на контактное приспособление с четырьмя зондами. Зонды, по которым подается питание, устанавливают на контактные площадки 1 и 6, а зонды с которых снимается выходное напряжение, и которые подключены к вольтметру - на контактные площадки 3 и 8.
На соленоид подают от источника питания со стабилизацией по току ток величиной 0,31А, что соответствует магнитному полю величиной 5 мТл.
Из информации фирмы Honeywell об угловых датчиках НМС 1501/ НМС 1512 известно, что «мост 0°» имеет косинусную зависимость, а «мост 45°» имеет синусную зависимость выходного напряжения от угла поворота. Поэтому, для «моста 0°» замеряют два значения выходного напряжения - одно при поле направленном параллельно ОЛН (0°), а второе при поле, направленном перпендикулярно ОЛН (90°). В этих двух положениях будут наблюдаться максимальное и минимальное значения выходного напряжения.
Максимальное и минимальное значения амплитуды выходного напряжения выбраны из соображений возможности их измерения с наименьшей погрешностью. Для сбалансированного моста обе амплитуды равны по модулю.
В случае разбаланса осуществляют грубую подгонку, перерезая перемычки соответствующих подгоночных сопротивлений «10» по направлению, указанному знаком  .
.
Если этого окажется недостаточным, то удаляют часть материала с сопротивления тонкой подгонки «11». Погрешность подгонки во многом определяется инструментом, чем меньше диаметр луча лазера, тем точнее она может быть проведена. В данном случае грубая подгонка давала 8 мВ добавки при перерезании одной перемычки и менее 1 мВ при тонкой подгонке.
Аналогичным способом балансируется и «мост 45°», у которого зависимость выходного напряжения от угла поворота синусная и его минимальное и максимальное значение замеряются при углах 45° и 135° относительно ОЛН.
В таблице 1 представлены результаты балансировки двухмостовых датчиков после грубой подгонки. 
Из таблицы видно, что в случае грубой подгонки погрешность составляла от ±1 мВ до ±5 мВ.
В случае тонкой подгонки удалось достичь погрешности менее ±1 мВ, типично ±0,5 мВ.
Искомый угол определяется по формуле:

По угловой характеристике, представленной на фиг. 3a, наглядно видно, что значения «α» для разбалансированного моста не будут соответствовать табличным.
Таким образом, можно констатировать, что предложен оригинальный способ, который существенно отличается от известных и позволяет балансировать угловой тонкопленочный магниторезистивный датчик с погрешностью, определяемой возможностью инструмента удалять минимальное количество материала с сопротивления точной подгонки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2020 |
|
RU2730108C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2007 |
|
RU2347302C1 |
| Способ изготовления магниторезистивного датчика | 2016 |
|
RU2617454C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГНИТОРЕЗИСТИВНОГО ДАТЧИКА | 2013 |
|
RU2536317C1 |
| Способ изготовления магниторезистивного датчика | 2017 |
|
RU2659877C1 |
| АБСОЛЮТНЫЙ ДАТЧИК УГЛА ПОВОРОТА | 2010 |
|
RU2436037C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МАГНИТОРЕЗИСТИВНОГО ДАТЧИКА | 2011 |
|
RU2463688C1 |
| Магниторезистивный датчик магнитного поля | 2019 |
|
RU2738998C1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2016 |
|
RU2633010C1 |
| Абсолютный датчик угла поворота | 2023 |
|
RU2820033C1 |

Изобретение относится к датчикам для измерения угла поворота, основанным на анизотропном магниторезистивном эффекте в тонких магнитных пленках, и может быть использовано в системах управления подвижными объектами. Технический результат – балансировка углового магниторезистивного датчика. Способ балансировки углового магниторезистивного датчика содержит этапы, на которых осуществляют подключение дискретного ряда одинаковых подгоночных сопротивлений последовательно с плечами моста Уинстона и балансировку моста Уинстона путем увеличения сопротивлений плеч моста Уинстона последовательным лазерным перерезанием перемычек соответствующих подгоночных сопротивлений, сначала на включенный мост Уинстона подают магнитное поле величиной не менее поля насыщения магниторезистивного материала датчика, затем замеряют значения выходного напряжения моста Уинстона при двух взаимно перпендикулярных направлениях магнитного поля, при которых выходное напряжение имеет максимальное и минимальное значения, и добиваются равенства этих значений по абсолютной величине, увеличивая сопротивления плеч моста Уинстона. 3 ил., 1 табл.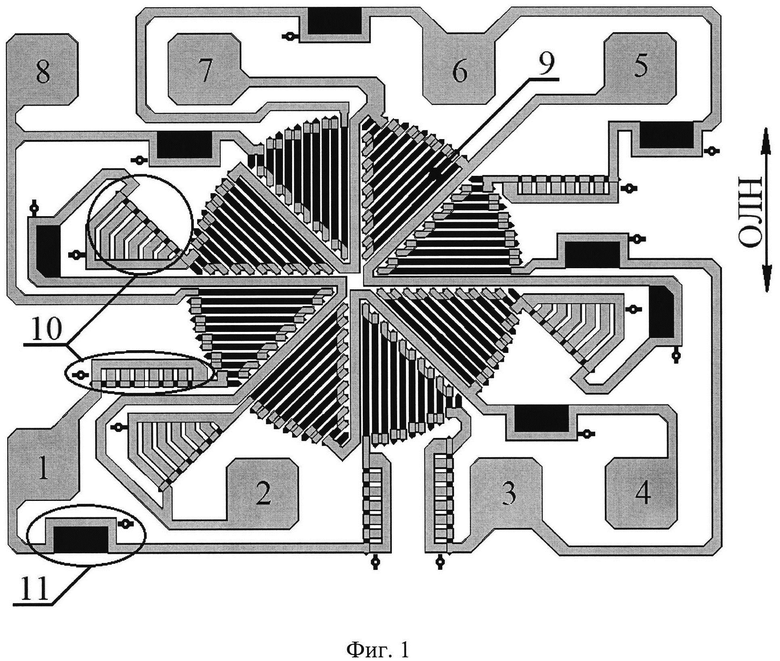
Способ балансировки углового магниторезистивного датчика, включающий подключение дискретного ряда одинаковых подгоночных сопротивлений последовательно с плечами моста Уинстона и балансировку моста Уинстона путем увеличения сопротивлений плеч моста Уинстона последовательным лазерным перерезанием перемычек соответствующих подгоночных сопротивлений, отличающийся тем, что для балансировки углового магниторезистивного датчика сначала на включенный мост Уинстона подают магнитное поле величиной не менее поля насыщения магниторезистивного материала датчика, затем замеряют значения выходного напряжения моста Уинстона при двух взаимно перпендикулярных направлениях магнитного поля, при которых выходное напряжение имеет максимальное и минимальное значения, и добиваются равенства этих значений по абсолютной величине, увеличивая сопротивления плеч моста Уинстона.
| Honeywell | |||
| Приспособление для перевода трамвайных стрелок с вагона | 1924 |
|
SU1501A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| МАГНИТОРЕЗИСТИВНЫЙ ДАТЧИК | 2007 |
|
RU2347302C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОКАЗАТЕЛЯ ЧУВСТВИТЕЛЬНОСТИ МАГНИТОРЕЗИСТИВНЫХ ДАТЧИКОВ | 2014 |
|
RU2553740C1 |
| US 5621320 A, 15.04.1997. | |||

