Настоящее изобретение относится к импульсному лазерному устройству для очистки или обработки поверхности, в частности, выполненному с возможностью удаления загрязнений, таких как окислы, органический материал, неорганический материал или следы сварки, с поверхности. Изобретение также относится к способу очистки или обработки поверхности.
Устройства для лазерной очистки известны в данной области техники, например из US 5948172. В данном патенте США описано лазерное очищающее устройство, содержащее лазерный источник и оптические элементы, которые в совокупности проецируют лазерный луч на поверхность, подлежащую очистке. Подвод тепла лазера на поверхность выполнен с возможностью испарения верхнего слоя поверхности, такого как окисел, органический или неорганический слой на металлической полосе или неметаллической полосе.
Кроме того, возможно окисление поверхностного слоя загрязнения, которое вызывается локальным подводом тепла лазера.
Для повышения скорости очистки проецируемым лазерным лучом быстро сканируют вдоль подлежащей очистке поверхности, так что эффективный очищающий луч перестает быть маленькой точкой, а становится одномерной лазерной линией поперек поверхности.
Кроме того, за счет быстрого сканирования количество тепла, подводимого лазером внутрь поверхности, сводится к минимуму, т.к. каждая точка на поверхности становится освещенной на короткий период времени. Это предотвратит направление большого количества тепла внутрь поверхности, тем самым предупреждая повреждение нижележащего не являющегося загрязнением материала.
Несмотря на тот факт, что очищающее устройство, которое имеет лазерный луч в форме линии, будет достигать хороших очищающих свойств для плоских поверхностей и, в частности, когда лазерное устройство является стационарным устройством, оказалось, что такой очистки может быть недостаточно для очистки трехмерных поверхностей. Кроме того, лазерная очистка может оказаться недостаточной в случае необходимости ее применения с использованием ручного лазерного очищающего устройства.
Примером применения, в котором требуется очистка трехмерных поверхностей, являются формы для отливки (например, формы, которые используют для формования стеклянных бутылок, пластмассовых бутылок или резиновых изделий), внутренняя формующая поверхность которых после многократного использования становится загрязненной слоем окисла или органических отложений.
Другие устройства для очистки поверхности посредством лазерного луча известны из US 2015/0076125 А1, в котором устройство содержит по меньшей мере одну выполненную с возможностью вращения призму для сканирования лучом вдоль поверхности по двухмерной фиксированной по существу круглой схеме. Однако эта круглая схема не обладает высокой приспособляемостью, т.к., например, радиус проецируемой круглой схемы остается постоянным.
Еще одно устройство для проецирования лазерного луча на поверхность и сканирования лучом этой поверхности в двух измерения известно из US 5,916,461. Данное устройство выполнено с возможностью сканирования лучом с использованием двух поворотных зеркал, которые расположены в фиксированном месте, для достижения напоминающего пескоструйную очистку эффекта за счет разрушения поверхности. Однако это устройство для получения напоминающего пескоструйную очистку эффекта будет не в состоянии достичь скоростей сканирования, которые требуются в целях лазерной очистки. К тому же эта система содержит управляющий компьютер, выполненный с возможностью управления лучом только на основе случайного распределения частиц и на основе настроек лазера, которые остаются постоянными в течение процесса разрушения поверхности.
Задачей настоящего изобретения является создание импульсного лазерного устройства, лишенного по меньшей мере одного из вышеперечисленных недостатков, или по меньшей мере создание альтернативного импульсного лазерного устройства.
Настоящее изобретение направлено на создание ручного импульсного лазерного устройства для очистки или обработки поверхности, содержащего:
- лазерный источник, выполненный с возможностью излучения импульсного лазерного луча,
- регулятор фокусного расстояния, выполненный с возможностью изменения фокусного расстояния луча, и
- дефлектор луча, выполненный с возможностью отклонения луча для сканирования лучом вдоль поверхности,
отличающегося тем, что оно также содержит:
- по меньшей мере один датчик, выполненный с возможностью обеспечения сигнала датчика, представляющего параметр, который относится к характеристике поверхности, и
- блок управления, выполненный с возможностью управления, на основе сигнала датчика, дефлектором луча для сканирования лучом вдоль поверхности по меньшей мере по двухмерной схеме.
Было установлено, что ручное импульсное лазерное устройство в соответствии с настоящим изобретением позволяет достигать улучшенных результатов очистки или обработки поверхности за счет проецируемой схемы на поверхность. Ручное импульсное лазерное устройство выполнено с возможностью неоказания значительного влияния на поверхность под слоем загрязнения и, в частности, ненанесения повреждения поверхности. Этого можно достичь путем точного управления плотностью энергии лазерного луча на поверхности, например, количеством лазерной энергии на единицу площади, т.к. при поддержании этой плотности энергии ниже определенного порогового значения и распространении энергии по всей поверхности, подлежащей очистке, воздействию будет подвергаться только верхний слой загрязнения поверхности, например, окисляться или отсоединяться в результате локализованных термических напряжений, тогда как лежащий под ним не являющийся загрязнением слой останется нетронутым.
Ручное импульсное лазерное устройство, в частности, удобно для очистки сложных трехмерных деталей, таких как формы для отливки или неплоские поверхности, например, подвергающиеся коррозии. Таким образом, ручное устройство обеспечивает преимущество над вышеупомянутыми стационарными устройствами, т.к. им может вручную орудовать оператор, что удобно для очистки относительно небольших единичных поверхностей. В этом отличие от вышеупомянутых устройств, которые требуют программирования устройства для перемещения лазера вдоль поверхности и очистки поверхностей.
Термин «ручное» означает, что устройство по меньшей мере содержит ручную часть, в частности, ручную часть, из которой проецируется лазерный луч. Ручная часть может, например, представлять собой напоминающую фонарь часть, которой может манипулировать оператор. Следовательно, ручное импульсное лазерное очищающее устройство может содержать вторую часть, в которой, например, может быть расположен лазерный источник, которая не должна быть ручной, чтобы достичь преимущественных эффектов настоящего изобретения.
Настоящее устройство выполнено с возможностью сканирования лучом вдоль поверхности и проецирования на нее луча по двухмерной схеме. Лазерные очищающие устройства известного уровня техники пока еще не достигают скорости сканирования, которая требуется для достижения улучшенных результатов очистки или обработки.
Двухмерная схема, которая проецируется лазером на поверхность, определена как любая схема, для которой луч был отклонен в любой векторной комбинации первого направления и второго направления, где второе направление перпендикулярно первому направлению. Схема может быть предварительно запрограммированной в блоке управления, предпочтительно в числе других предварительно запрограммированных схем, так что оператор может выбирать наиболее подходящую схему сканирования для конкретной задачи, которая должна быть выполнена с помощью устройства. Предпочтительно блок управления содержит устройство переключения, которое позволяет оператору выбирать наиболее подходящую схему сканирования.
Лазерный источник выполнен с возможностью излучения импульсного лазерного луча. Понятно, что в случае импульсного лазерного луча вместо непрерывно проецируемого лазерного луча проецирование луча периодически прерывается во время работы устройства. Благодаря укороченным периодам освещения поверхности лучом подвод тепла лазером внутрь поверхности снижается. Это может ограничить повреждение подповерхностных слоев основы, подлежащей очистке, тогда как поверхностный слой загрязнения может быть эффективно удален.
Тепло лазерных импульсов образуется в основе только в течение короткого периода времени. Окружающий материал основы, прилегающий к точке падения лазерного импульса на поверхность, останется относительно ненагретым. Это обусловлено, во-первых, низким подводом тепла, но, во-вторых, рассеяние тепла по материалу основы тоже будет высоким. Поэтому образуемое тепло в точке падения будет быстро распространяться по всему окружающему материалу, так что и подповерхностный материал основы под точкой падения тоже не будет существенно нагреваться.
Следует отметить, что лазерный луч устройства выполнен с возможностью очистки или обработки поверхности при взаимодействии с поверхностью. Вариант реализации, который описан далее, выполнен с возможностью очистки поверхности путем удаления слоя загрязнения на ней. В альтернативных вариантах реализации устройство может быть выполнено с возможностью обработки поверхности, например, гравирования рисунка на поверхности или травления поверхности.
Удаление поверхностного слоя может быть достигнуто за счет локального нагревания его лазерным лучом, приводящего к локальному повышению температуры и испарению поверхностного слоя. Путем установки временного интервала между импульсами, интенсивности импульса и расстояния на основе между последовательными импульсами можно добиться тщательной очистки поверхности без повреждения подповерхностных слоев.
Регулятор фокусного расстояния выполнен с возможностью регулирования фокусного расстояния луча. Проецируемый лазерный луч фокусируется в регуляторе фокусного расстояния, так что в некоторой точке вдоль направления проецирования луча формируется фокусная точка, в которой плотность энергии луча (энергия на единицу площади проекции луча) наибольшая. Чтобы достичь максимального чистящего эффекта, фокусную точку предпочтительно фокусируют на поверхностном слое, чтобы максимально увеличивать в нем локальное нагревание.
Для изменения фокусного расстояния луча с помощью регулятора фокусного расстояния регулятор может содержать подвижный оптический элемент, такой как подвижная линза. Линза может быть собирающего типа, чтобы сужать входящий лазерный луч, или рассеивающего типа, чтобы расширять входящий лазерный луч. Изменяя положение подвижного оптического элемента вдоль направления проецирования, можно достичь изменения фокусного расстояния между фокусной точкой и лазерным источником и, таким образом, между фокусной точкой и лазерным очищающим устройством. В альтернативном варианте реализации фокусное расстояние можно регулировать при помощи настраиваемой линзы.
В одном варианте реализации устройства регулятор фокусного расстояния может содержать множество подвижных оптических элементов. Таким образом, устройство может быть выполнено с возможностью более точного изменения положения фокусной точки по сравнению с тем, когда использовался бы только один подвижный оптический элемент.
Сканирование лучом вдоль поверхности, которое обеспечивает улучшенные очищающие свойства для трехмерных поверхностей, достигается при помощи дефлектора луча. Дефлектор луча расположен по меньшей мере частично на пути луча для того, чтобы отклонять луч и изменять направление проецирования луча.
Для достижения двухмерной схемы сканирования луча на поверхности дефлектор луча выполнен с возможностью изменения направления проецирования луча вдоль любой линейной комбинации двух перпендикулярных направлений, которые ориентированы по существу параллельно поверхности. Схема сканирования предпочтительно представляет собой схему, которая делает возможным равномерный очищающий эффект поверхности для достижения тщательной очистки поверхности. Схема сканирования предпочтительно не является случайной схемой, т.к. было обнаружено, что случайные схемы не обеспечивают требуемого равномерного очищающего эффекта.
В одном варианте реализации дефлектор луча содержит по меньшей мере одно подвижное зеркало, которое расположено на пути луча. Для отклонения луча в двух измерениях дефлектор выполнен с возможностью изменения угла наклона относительно по меньшей мере одной перпендикулярной оси, предпочтительно относительно двух перпендикулярных осей.
Для достижения отклонения лазерного луча в дефлекторе луча в качестве альтернативы или дополнительно к по меньшей мере одному подвижному зеркалу могут быть предусмотрены также другие оптические элементы, такие как линзы.
В одном варианте реализации по меньшей мере одно подвижное зеркало может быть одним зеркалом с изменяемым углом наклона, причем дефлектор луча содержит один или более исполнительных механизмов, с помощью которых зеркало может быть наклонено относительно двух перпендикулярных осей. Предпочтительно одно зеркало с изменяемым углом наклона содержит шесть исполнительных механизмов для изменения ориентации зеркала относительно луча. Преимущество этого заключается в том, что ориентация зеркала может быть адаптирована с шестью степенями свободы, включая три направления смещения и три вращения вокруг осей.
В альтернативном варианте реализации по меньшей мере одно зеркало может представлять собой два зеркала с изменяемым углом наклона, причем первое из них выполнено с возможностью наклона относительно первой оси, а второе из них выполнено с возможностью наклона относительно второй оси, которая ориентирована перпендикулярно первой оси. Таким образом, каждое из двух зеркал с изменяемым углом наклона содержит один исполнительный механизм, который выполнен с возможностью наклона зеркала.
По меньшей мере одно подвижное зеркало, как правило, представляет собой обычное плоское зеркало, но может, в варианте реализации, также быть изогнутым. Такое изогнутое зеркало может вносить свой вклад в фокусирование луча в дополнение к фокусированию луча, обеспечиваемому регулятором фокусного расстояния.
По меньшей мере одни датчик устройства выполнен с возможностью измерения параметра, который относится к характеристике подлежащей очистке поверхности, и передачи сигнала, который представляет измеряемый параметр поверхности. Датчик также может быть выполнен с возможностью измерения этого параметра поверхности в зависимости от параметра устройства. Примером этого может служить расстояние между местоположением поверхности и местоположением устройства. Таким образом, устройство может быть выполнено с возможностью изменения одного или более параметров лазерного луча, который проецируется на поверхность, на основе измеренного параметра поверхности. Путем адаптирования одного или более параметров лазерного луча на основе измеренного параметра поверхности можно улучшать очищающие или обрабатывающие свойства устройства и оптимально корректировать их с учетом конкретных ситуаций.
Устройство также содержит блок управления, причем дефлектор луча выполнен с возможностью управления им с помощью блока управления на основе измеряемого сигнала датчика. Таким образом, блок управления может быть выполнен с возможностью управления дефлектором луча и тем самым обеспечения возможности сканирования лучом вдоль поверхности, подлежащей очистке или обработке.
Кроме того, блок управления предпочтительно выполнен с возможностью установки уровня энергии луча для достижения на поверхности требуемой плотности энергии, например, количества энергии на единицу площади поверхности. Требуемой плотностью энергии является та, которой достаточно для достижения надлежащего окисления слоя загрязнителей на поверхности. Окисление загрязнителей является, помимо прочего, функцией от плотности энергии и содержания кислорода, доступного на поверхности. Содержание кислорода на поверхности обычно является заданным значением, но плотность энергии луча может быть отрегулирована для достижения оптимального окисления загрязнителей.
По меньшей мере один датчик в одном варианте реализации устройства выполнен с возможностью обеспечения сигнала, который представляет плотность энергии луча на поверхности. Примером параметра, который представляет плотность энергии луча на поверхности и может быть измерен по меньшей мере одним датчиком, может, например, быть спектр света, имеющий длины волн, которые, например, находятся в УФ-диапазоне, может быть высотой и/или амплитудой звука, который создается взаимодействием между лазерным лучом и поверхностью.
Поэтому блок управления выполнен с возможностью сравнения измеряемой плотности энергии с требуемой плотностью энергии для конкретной ситуации, например, исходя из содержания кислорода.
На основе сравнения блок управления может регулировать энергию луча для изменения плотности энергии луча на поверхности, чтобы достичь оптимального окисления слоя загрязнителей.
Наконец, по меньшей мере один датчик может обеспечивать сигнал в блок управления, причем блок управления выполнен с возможностью определения эффективности процесса очистки поверхности на основе этого сигнала. Предпочтительно блок управления может быть выполнен с возможностью определения совокупной эффективности очистки от начала очистки конкретной поверхности до ее завершения, когда процесс очистки останавливается.
Известные лазерные очищающие устройства выполнены с возможностью сканирования лазерным лучом вдоль подлежащей очистки поверхности по существу по одномерной схеме. В частности, направление сканирования лазерного луча главным образом ориентировали перпендикулярно направлению продвижения всего устройства относительно основы. Это продвижение вызывали, например, посредством перемещения вручную оператором в том случае, когда устройство должно было быть ручным.
Однако устройство в соответствии с настоящим изобретением выполнено с возможностью сканирования лучом вдоль поверхности по меньшей мере по двухмерной схеме на основе измеряемого сигнала датчика.
Таким образом, в соответствии с настоящим изобретением сканирование лучом может быть также параллельно направлению продвижения устройства. Отличие от известных лазерных очищающих устройств состоит в том, что движение луча, параллельное направлению продвижения, больше не требует перемещения всего устройства, а может быть также осуществлено, когда устройство остается неподвижным относительно поверхности.
Сканирование лучом по двухмерной схеме обеспечивает преимущество, состоящее в том, что тепло, подводимое лазером внутрь поверхности, может распространяться по поверхности в двух измерениях, а не только в одном измерении, как это имело место с известными лазерными очищающими устройствами. Устройство в соответствии с настоящим изобретением может использовать лазерные импульсы с более высокой энергией, т.к. тепло лучше распространяется по всей сканируемой поверхности. Это может позволить быстрее и тщательнее очищать поверхность.
В одном варианте реализации схема сканирования луча содержит внешний контур, который проецируют на поверхность, подлежащую очистке. После этого во время сканирования лучом внешний контур заполняют лучом при помощи возвратно-поступательного сканирующего движения внутри внешнего контура.
Во время сканирования лучом схему многократно проецируют, поэтому после того, как первый внешний контур заполнен посредством возвратно-поступательного сканирующего движения, лазерный луч отклоняют так, чтобы проецировать на поверхность второй внешний контур, который, в свою очередь, заполняют посредством второго возвратно-поступательного сканирующего движения.
Чтобы улучшить очищающий эффект устройства, с помощью лазерного луча можно обеспечить перекрытие двух или более последовательных схем на поверхности, приводящее к перекрытию внешних контуров.
Заявителем было установлено, что с использованием схемы этого типа можно очень хорошо очищать поверхности, в частности, трехмерные поверхности. Это объясняется тем фактом, что энергия лазерных импульсов может быть установлена высокой, т.к. сканируемый контур относительно большой.
Кроме того, большая сканируемая площадь обеспечивает преимущество, состоящее в том, что скорость продвижения устройства, которая является относительной скоростью между устройством и основой, может быть высокой и/или неравномерной по направлению и амплитуде, благодаря чему эта схема сканирования очень подходит для ручных лазерных очищающих устройств.
В одном варианте реализации схема сканирования является по существу круглым. Поэтому внешний контур схемы представляет собой окружность, тогда как внутреннюю часть окружности заполняют посредством возвратно-поступательных линейных проходов. Эти линейные проходы содержат множество параллельных линий, которые отстоят друг от друга. Таким образом, направление сканирования линейных проходов может быть выбрано в первом направлении, тогда как между последовательными возвратно-поступательными проходами луч перемещают во втором направлении, перпендикулярном первому направлению.
В альтернативном варианте реализации круглый внешний контур может быть заполнен посредством спиральной схемы луча, сходящейся к центральной точке круглого внешнего контура. В еще одном варианте реализации внешний контур может быть также эллипсоидом или прямоугольником, который тоже может быть заполнен возвратно-поступательным линейным движением сканирования.
В еще одном варианте реализации схема сканирования представляет собой синусоиду, ширина которой не равна в точности множеству полудлин волн синусоиды. Данная схема достигается возвратно-поступательным сканированием лазерным лучом по поверхности вдоль ширины сканирования, которая не равна в точности множеству полудлин волн синусоиды. По этой причине узловые точки схемы, в которых пересекаются последующие возвратно-поступательные проходы сканирования, находятся не в фиксированном местоположении на поверхности, а перемещаются вдоль поверхности, предпочтительно по всей ширине сканирования. Плотность энергии в узловых точках относительно большая по сравнению с любым другим местом прохождения лазерного луча. Благодаря перемещению высокоэнергетических узловых точек вдоль поверхности энергия, подводимая внутрь поверхности, распространяется лучше, что делает возможным боле равномерный чистящий эффект и улучшенное распространение по всей поверхности.
В одном варианте реализации возвратно-поступательное сканирующее движение лазерного луча совмещено с синусоидальной схемой. Т.е. возвратно-поступательное сканирующее движение луча с проходами сканирования в первом направлении также содержит колебательное движение луча. Это синусоидальное колебание может иметь ось равновесия, которая ориентирована параллельно первому направлению, и амплитуду колебания, которая параллельна второму направлению.
Локальное нагревание поверхности лазерным лучом обеспечивает преимущество, состоящее в том, что в поверхностном слое, подлежащем удалению, может быть вызвано пульсирующее напряжение. Пульсирующее напряжение вызывается локальным нагреванием поверхностного слоя в течение коротких периодов времени, что приводит к локальному тепловому расширению, которое может распространяться по всему поверхностному слою подобно ударной волне.
Окружающий материал остается по существу ненагретым и не подвергается тепловому расширению. В термически расширенной части поверхностного слоя возникает сжимающее напряжение, вызывающее локальное коробление поверхностного слоя, которое приведет к локальному отслаиванию поверхностного слоя.
Благодаря совмещению движения луча с синусоидальной схемой область, где формируются пульсирующие напряжения в поверхностном слое, увеличена по сравнению с тем, если бы лучом сканировали только линейными проходами вдоль поверхности. В альтернативных вариантах реализации возвратно-поступательное сканирующее движение может быть совмещено не с синусоидальной схемой, а с другой схемой, такой как схема прямоугольной волны, или любая другая схема периодического колебания.
В одном варианте реализации возвратно-поступательное сканирующее движение совмещено со спиральной схемой. Было установлено, что применение такой спиральной схемы во время очистки основ тоже улучшает очищающие свойства. Когда спиральную схему проецируют на поверхность, линейные проходы лазера на поверхности заменяют спиральными проходами, которые тоже проецируют возвратно-поступательно на поверхность.
За счет совмещения синусоидальной схемы, как описано выше, луч, помимо проходов сканирования в первом направлении, колеблется во втором направлении.
Однако по сравнению с этой синусоидальной схемой совмещение со спиральной схемой дополнительно содержит одновременное колебание в первом направлении во время проходов сканирования. Поэтому дефлектор луча выполнен с возможностью обеспечения возвратно-поступательного сканирующего движения луча в первом направлении, а также колебания луча в первом и во втором направлениях.
В еще одном варианте реализации с возвратно-поступательным сканирующим движением может быть совмещена случайная колебательная функция для дополнительного распространения подводимого лазером тепла и/или вызова дополнительных пульсирующих напряжений.
В альтернативном или дополнительном варианте реализации блок управления выполнен с возможностью наложения двухмерной проецируемой схемы на изменение фокусного расстояния, например на синусоидальное изменение фокусного расстояния. Этим достигают более эффективной очистки поверхностей, в частности, трехмерных поверхностей, т.к. лазерным лучом сканируют не только в горизонтальном направлении, но и в вертикальном направлении, чтобы компенсировать изменения высоты поверхности.
В одном варианте реализации по меньшей мере один датчик является датчиком спектрального анализа, который посредством электроники соединен с блоком управления. Датчик спектрального анализа нацелен на поверхность, предпочтительно на точку падения лазерного луча на поверхность. Датчик спектрального анализа может быть расположен внутри или возле любого из лазерного источника, регулятора фокусного расстояния, дефлектора луча или, предпочтительно, блока управления. Однако в альтернативном варианте реализации датчик спектрального анализа может быть расположен отдельно от любого из вышеперечисленных элементов лазерного очищающего устройства.
Датчик спектрального анализа может быть выполнен с возможностью обеспечения сигнала, который представляет интенсивность или множество разных интенсивностей электромагнитного излучения, излучаемого с поверхности в результате проецирования лазерного луча на поверхность. Кроме того, датчик спектрального анализа может быть выполнен с возможностью измерения спектров длин волн излучаемого электромагнитного излучения.
Сигнал датчика с датчика спектрального анализа может также содержать информацию о плотности энергии луча, например, количество энергии на единицу площади, которое прилагается к поверхности лазерным лучом.
Сигнал датчика с датчика спектрального анализа может также содержать информацию о длине волны лазерного луча, который проецируют на поверхность. Измеренная длина волны и, в частности, измеренная длина волны в УФ-спектре, содержит информацию о фокусном расстоянии луча на поверхности.
Сигнал датчика, предоставляемый датчиком спектрального анализа, может быть комбинированным сигналом, который содержит информацию, представляющую самые разные свойства. Блок управления предпочтительно выполнен с возможностью разложения комбинированного сигнала датчика для отделения информации датчика по каждому из разных свойств.
Что касается излучения, испускаемого поверхностью, оно содержит информацию о взаимодействии между лазерным лучом и поверхностью, подлежащей очистке. Соответственно, путем измерения параметров испускаемого излучения и анализа полученных данных можно получать представление о процессе очистки. Кроме того, во время очистки параметры процесса, касающиеся лазерного луча, могут быть адаптированы блоком управления на основе измеренных интенсивностей и длин волн испускаемого излучения.
В одном варианте реализации устройства блок управления выполнен с возможностью подачи предупредительного сигнала, когда очистка поверхности и удаление слоя загрязнителей приводит к образованию опасных паров. Эти пары могут представлять собой, например, пары свинца, цинка и/или хрома, или пары металлов в целом, которые, как известно, являются опасными или даже ядовитыми при вдыхании людьми. Блок управления выполнен с возможностью обеспечения предупредительного сигнала при обнаружении этих паров, например, при обнаружении их в сигнале, предоставляемом датчиком спектрального анализа.
Блок управления может содержать базу данных параметров, в которой хранятся подходящие параметры очистки для определенных материалов, которые могут быть очищены с помощью устройства. Таким образом, блок управления может, после выбора оператором подлежащего очистке материала, автономно выбирать эти параметры для подлежащего очистке материала. Примерами таких параметров являются плотность энергии лазерного луча или частота лазерных импульсов.
Первая часть испускаемого излучения может содержать инфракрасное излучение. Это инфракрасное излучение представляет собой отражение поверхностью инфракрасного излучения из проецируемого лазерного луча. Т.к. это инфракрасное излучение было отражено непосредственно, его энергия не используется для нагрева поверхностного слоя загрязнения, подлежащего очистке, и не вносит вклад в удаление поверхностного слоя. Однако длина волны отраженного инфракрасного излучения уникальна, определяется непосредственно проецируемым лазерным лучом и может быть легко выделена из спектра испускаемого излучения. Кроме того, разница в интенсивности между количеством излучения, которое испускается лазерным источником, и количеством отраженного инфракрасного излучения может служить мерой количества излучения, которое поглощается поверхностью.
Вторая часть испускаемого излучения содержит излучение теплового происхождения. Это излучение, имеющее длину волны, которая, как правило, не совпадает с длиной волны отраженного инфракрасного излучения, является мерой нагревания поверхности под воздействием лазерного луча. Под воздействием лазера на поверхности может происходить экзотермическая окислительная реакция, которая может приводить к испусканию инфракрасного излучения теплового происхождения.
Таким образом, температуру на поверхности тоже можно определять, т.к. испускаемое излучение зависит от температуры поверхности, из которой исходило излучение. Температуру можно контролировать для предотвращения перегрева основы и, в частности, не являющихся загрязнением подповерхностных слоев, под воздействием лазерного луча.
В блоке управления может быть предусмотрена база данных с пороговыми значениями для поверхностных (подповерхностных) температур, чтобы при выборе подлежащего очистке материала блок управления мог автономно определять максимально допустимую температуру поверхности.
Третья часть испускаемого излучения может быть плазменным свечением, имеющим длины волн в пределах ультрафиолетового диапазона. Длины волн плазменного свечения могут указывать, окисляются ли металлы и какие. Кроме того, если, например, материал основы является не металлом с металлическим загрязняющим слоем, или наоборот, в плазменном свечении можно наблюдать, окисляется ли слой загрязнения (металл), или окисляется ли основа (не металл).
Четвертая часть испускаемого излучения может быть светом с длинами волн в видимом диапазоне. Спектр длин волн в этой четвертой части может указывать тип элементов, которые высвобождаются из поверхности во время окисления. Кроме того, видимый свет может быть мерой для тепловых реакций, происходящих на поверхности под воздействием лазерного луча.
Блок управления может быть выполнен с возможностью управления, на основе измеренных параметров в спектре испускаемого излучения, одним или более из плотности заполнения возвратно-поступательного сканирующего движения в пределах внешнего контура, размера внешнего контура, количества энергии на лазерный импульс, частоты импульсов, расстояния между последовательными лазерными импульсами на подлежащей очистке поверхности и количества лазерных импульсов на единицу площади поверхности.
В одном варианте реализации датчик спектрального анализа может быть выполнен с возможностью оперативного измерения свойств в спектре испускаемого излучения. Можно предусмотреть подачу в режиме реального времени значений датчика в блок управления в ходе очистки лазерным устройством, чтобы блок управления мог оперативно управлять устройством на основе обеспечиваемой обратной связи из датчика.
Датчик расстояния выполнен с возможностью передачи сигнала, который представляет измеренное относительное расстояние между устройством и поверхностью. Это относительное расстояние имеет важное значение для определения фокусного расстояния устройства, т.к. любое изменение расстоянии между устройством и поверхностью требует также изменения фокусного расстояния, по меньшей мере, когда необходимо достичь оптимального чистящего эффекта путем фокусирования фокусной точки лазера на поверхности.
В одном варианте реализации устройство может содержать и датчик спектрального анализа, и датчик расстояния.
В альтернативном или дополнительном варианте реализации устройство содержит ультразвуковой датчик. Ультразвуковой датчик выполнен с возможностью излучения ультразвуковых волн на поверхность для измерения отраженных от поверхности ультразвуковых волн и обеспечения сигнала датчика, который основан на излучаемых ультразвуковых волнах и измеренных отраженных ультразвуковых волнах.
В данном варианте реализации блок управления выполнен с возможностью сравнения излучаемых ультразвуковых волн с отраженными ультразвуковыми волнами. На основе этого сравнения можно получать характеристику поверхности или определять взаимодействие между устройством и поверхностью. Блок управления может быть выполнен с возможностью определения, на основе сигнала ультразвукового датчика, материала, из которого сделана поверхность. Блок управления может быть дополнительно выполнен с возможностью установки значений управления для лазерного источника, регулятора фокусного расстояния и дефлектора луча на основе определенного материала поверхности.
Предпочтительно блок управления содержит базу данных предварительно установленных значений со значениями управления для различных возможных материалов поверхности.
Датчик расстояния может быть обеспечен в виде датчика спектрального анализа или в виде ультразвукового датчика. Блок управления предпочтительно выполнен с возможностью определения расстояния между устройством и поверхностью на основе значений как с датчика спектрального анализа, так и с ультразвукового датчика, чтобы обеспечивать определение расстояния с помощью одного из датчиков и возможность проверки этого определенного расстояния с помощью другого датчика.
В другом варианте реализации устройства блок управления выполнен с возможностью управления лазерным источником во избежание излучения лазерного луча, когда устройство не нацелено на подлежащую очистке поверхность. Предпочтительно лазерный луч не излучается, когда не поступает сигнала с ультразвукового датчика, или когда устройство нацелено на нетипичную поверхность, например ткань человека. Таким образом, предотвращается возможность проецирования устройством лазерного луча на не предназначенные для этого мишени, такие как люди и т.п.
В еще одном варианте реализации система содержит акустический датчик, который выполнен с возможностью передачи сигнала, представляющего акустическое свойство взаимодействия между лазерным лучом и поверхностью. Сигнал предпочтительно представляет высоту и/или амплитуду звука, создаваемого взаимодействием между лазерным лучом и поверхностью.
В данном варианте реализации блок управления выполнен с возможностью установки значений управления для лазерного источника на основе измеренного звукового сигнала. Блок управления, например, выполнен с возможностью регулировки плотности энергии луча на основе высоты измеряемого звука. При этом известно, что наибольшая возможная высота звука является отличительным признаком оптимального чистящего эффекта.
В качестве альтернативы или дополнительно блок управления выполнен с возможностью установки значений управления для регулятора фокусного расстояния на основе акустического свойства. Звук лазерного луча на поверхности меняется при перемещении луча в фокус и из фокуса. Таким образом, блок управления может на основе этого звука управлять регулятором фокусного расстояния, чтобы фокусировать луч.
В качестве альтернативы или дополнительно устройство может содержать индикатор для указания фокусного расстояния оператору устройства и/или для отображения того, правильно ли расположено устройство относительно поверхности, или нужно ли приблизить его к поверхности или отдалить от поверхности.
В одном варианте реализации регулятор фокусного расстояния выполнен с возможностью изменения фокусного расстояния луча во время очищения поверхности. В частности, управление этим изменением может осуществляться блоком управления на основе измеряемого сигнала относительного расстояния между устройством и подлежащей очистке поверхностью. Таким образом, управление фокусированием может осуществляться в контуре с обратной связью, который обеспечивает более тщательную очистку поверхности.
В частности, так как устройство ручное и, следовательно, имеет тенденцию двигаться в руках оператора, и/или когда подлежащая очистке поверхность не полностью плоская, такая автоматизированная функция фокусирования гарантирует улучшенное и более эффективное очищающее усилие по сравнению с тем, если бы фокусную точку луча предварительно устанавливали перед началом очистки.
Поэтому в одном варианте реализации лазерное очищающее устройство содержит акселерометр, который выполнен с возможностью передачи сигнала, представляющего ориентацию и/или смещение устройства. При этом акселерометр выполнен с возможностью обнаружения движений устройства, в частности, движений, непроизвольно вызываемых оператором. В данном варианте реализации блок управления выполнен с возможностью установки значений управления для регулятора фокусного расстояния и/или дефлектора луча на основе сигнала с акселерометра.
Таким образом, блок управления может управлять регулятором фокусного расстояния для изменения фокусного расстояния луча. За счет изменения фокусного расстояния луча можно компенсировать движения устройства в целом в направлении, параллельном лучу, чтобы поддерживать фокусирование луча на поверхности.
В качестве альтернативы или дополнительно блок управления может управлять дефлектором луча для изменения двухмерного схемы, по которой лазерный луч сканирует поверхность. Если устройство, например, перемещается целиком в одном направлении и установлено на проецирование круглой схемы, управление дефлектором луча осуществляется таким образом, чтобы проецировать эллипсоидную схему, а не круглую схему. Эта эллипсоидная схема может иметь короткую ось эллипсоида, параллельную направлению распространения, так что эффективная схема, образуемая комбинированным движением луча с помощью дефлектора луча и устройства в целом, оказывается круглой схемой.
Управление дефлектором луча и/или регулятором фокусного расстояния на основе сигнала акселерометра обеспечивает своего рода эффект стабилизации движения. Этот эффект позволяет использовать устройство как ручное устройство, которым может манипулировать оператор, а не как стационарные устройства известного уровня техники.
В одном варианте реализации регулятор фокусного расстояния помимо вышеупомянутой подвижной линзы содержит пьезоэлемент. Как известно, пьезоэлектрический материал деформируется при приложении к нему электрического напряжения. Используя пьезоэлемент в качестве исполнительного механизма, соединенного с подвижной линзой, можно изменять положение линзы, путем приложения напряжения к пьезоэлементу или снятия напряжения с него. Таким образом, пьезоэлемент выполнен с возможностью регулирования, совместно с подвижной линзой, фокусного расстояния луча при условии, что направление деформации пьезоэлемента ориентировано параллельно направлению проецирования луча.
В одном варианте реализации регулятор фокусного расстояния выполнен с возможностью синусоидального изменения фокусного расстояния луча вокруг измеряемого относительного расстояния между устройством и подлежащей очистке поверхностью. Таким образом, это синусоидальное изменение, которое также может быть любым другим периодическим изменением, накладывается на изменение фокусного расстояния, которое основывалось на измеряемом относительном расстоянии между устройством и поверхностью. За счет синусоидального изменения фокусного расстояния можно получать дополнительную форму волны в фокусной плоскости.
В альтернативном варианте реализации синусоидальное изменение может быть совмещено с фиксированным фокусным расстоянием, например, когда очищающее устройство должно быть стационарным устройством.
Это колебательное изменение позволит увеличивать эффективное фокусное расстояние устройства. Кроме того, если бы это периодическое изменение не применялось, фокусная точка имела бы глубину фокуса. Однако периодическое изменение фокусного расстояния, при котором амплитуда относительно мала по сравнению с расстоянием между устройством и поверхностью, увеличит среднеквадратическое (RMS) фокусное расстояние, часто называемое эффективным фокусным расстоянием.
Для управления колебательным изменением фокусного расстояния можно использовать исполнительный механизм на пьезоэлементе. Пьезоэлемент может быть деформирован при множестве частот, как и с множеством амплитуд. По команде оператора блок управления может управлять пьезоэлементом с помощью конкретной частоты и амплитуды колебания. Кроме того, блок управления может быть выполнен с возможностью выбора разных значений для частоты и амплитуды на основе измеряемого сигнала по меньшей мере с одного датчика.
В альтернативном или дополнительном варианте реализации блок управления выполнен с возможностью изменения сигналов управления для лазерного источника, дефлектора луча и/или регулятора фокусного расстояния вокруг установленных значений управления. Блок управления предпочтительно выполнен с возможностью изменения этих значений на основе алгоритма, такого как синусоидальная функция. С помощью этого изменения сигналов управления можно, например, достичь улучшенной очистки трехмерной и/или не неоднородной поверхности благодаря компенсации значений управления с учетом этих изменений.
В одном варианте реализации устройства один или более из вышеуказанных компонентов могут быть объединены в одном корпусе устройства. Этот корпус позволяет лазерному очищающему устройству стать относительно компактным и надежным. Кроме того, так как устройство ручное, объединение в одном корпусе особенно удобно, поскольку можно поддерживать относительное выравнивание между отдельными компонентами, и поскольку устройство можно держать в руках и манипулировать им как единым целым.
Изобретение также направлено на создание способа использования вышеупомянутого лазерного очищающего устройства во время очистки поверхности. В связи с этим способ включает в себя следующие этапы:
- обеспечение, с помощью по меньшей мере одного датчика, сигнала датчика, представляющего параметр, который относится к характеристике поверхности,
- фокусирование, с помощью регулятора фокусного расстояния, луча на поверхности, и
- сканирование, с помощью дефлектора луча, лучом вдоль поверхности по меньшей мере по двухмерной схеме.
Система для осуществления вышеупомянутого способа содержит блок управления, с помощью которого принимают сигнал датчика по меньшей мере с одного датчика. Датчик может быть датчиком расстояния, выполненным с возможностью измерения относительного расстояния между устройством и поверхностью, и выполненным с возможностью передачи сигнала, который представляет измеряемое значение.
Блок управления выполнен с возможностью управления на основе сигнала датчика регулятором фокусного расстояния для фокусирования луча на поверхности и управления дефлектором луча для сканирования лазерным лучом вдоль поверхности по меньшей мере по двухмерной схеме.
В одном варианте реализации этап сканирования включает повторение следующих этапов:
- описывание внешнего контура схемы, и
- описывание заполняющего возвратно-поступательного сканирующего движения в пределах внешнего контура схемы;
Устройство выполнено с возможностью непрерывного сканирования подлежащей очистке поверхности во время очистки поверхности. Дефлектор луча выполнен с возможностью чередования описывания внешнего контура лазерным лучом и описывания заполнения в пределах внешнего контура во время сканирования.
Внешний контур может быть любым из окружности, эллипса, квадрата, прямоугольника или любым внешним контуром двухмерной геометрической формы. Заполняющее возвратно-поступательное сканирующее движение может представлять собой множество разделенных промежутками параллельных линий. Однако в альтернативном варианте реализации заполнение может также включать в себя спиральную схему, множество разделенных промежутками параллельных синусоид или множество разделенных промежутками параллельных спиралей.
В еще одном варианте реализации способ включает повторение следующих этапов:
- измерение интенсивностей и/или длин волн электромагнитного излучения, испускаемого с поверхности, и
- управление на основе измеренных интенсивностей и/или длин волн одним или более из:
 плотности заполняющего возвратно-поступательного сканирующего движения в пределах внешнего контура схемы;
плотности заполняющего возвратно-поступательного сканирующего движения в пределах внешнего контура схемы;
энергии лазерного импульса;
расстояния и/или времени между последовательными лазерными импульсами на поверхности; и
количества лазерных импульсов на единицу площади поверхности.
Управляя вышеупомянутыми параметрами, можно изменять свойства лазерного луча. При изменении лазерного луча взаимодействие между лазерным лучом и подлежащей очистке поверхностью, как правило, тоже изменяется. Таким образом, очистку устройством можно улучшить на основе измеряемых интенсивностей и/или длин волн электромагнитного излучения, испускаемого с поверхности.
В одном варианте реализации способ включает в себя повторение следующих этапов:
- измерение относительного расстояния между устройством и поверхностью, и
- управление на основе измеренного расстояния одним или более из:
плотности заполняющего возвратно-поступательного сканирующего движения в пределах внешнего контура схемы;
энергии лазерного импульса;
расстояния и/или времени между последовательными лазерными импульсами на поверхности; и
количества лазерных импульсов на единицу площади поверхности.
Как упоминалось ранее, управляя вышеупомянутыми параметрами, можно изменять свойства лазерного луча. При изменении лазерного луча взаимодействие между лазерным лучом и подлежащей очистке поверхностью, как правило, тоже изменяется. Таким образом, очистку устройством можно улучшить на основе измеряемого относительного расстояния между устройством и поверхностью.
В еще одном варианте реализации способ включает в себя этап периодического, например, синусоидального, изменения фокусного расстояния луча. Это колебательное изменение позволит увеличивать эффективное фокусное расстояние устройства. Кроме того, если это периодическое изменение не применялось бы, фокусная точка имела бы бесконечно малую глубину фокуса. Однако периодическое изменение фокусного расстояния, при котором амплитуда относительно мала по сравнению с расстоянием между устройством и поверхностью, увеличит среднеквадратическое (RMS) фокусное расстояние, часто называемое эффективным фокусным расстоянием.
Дальнейшие характеристики импульсного лазерного устройства в соответствии с настоящим изобретением будут объяснены ниже со ссылкой на варианты его реализации, которые изображены на прилагаемых чертежах, где:
на Фиг. 1 схематически изображен вариант реализации ручного импульсного лазерного устройства в соответствии с настоящим изобретением,
на Фиг. 2 схематически изображено ручное импульсное лазерное устройство по меньшей мере частично при взаимодействии с лазерного луча с поверхностью,
на Фиг. 3А-3Е схематически изображены различные схемы, с возможностью проецирования которых на поверхность выполнено ручное импульсное лазерное устройство, и
на Фиг. 4 схематически изображено синусоидальное изменение фокусного расстояния луча во время сканирования поверхности.
На всех фигурах для ссылки на соответствующие компоненты или компоненты, имеющие соответствующие функции, используются одни и те же ссылочные обозначения.
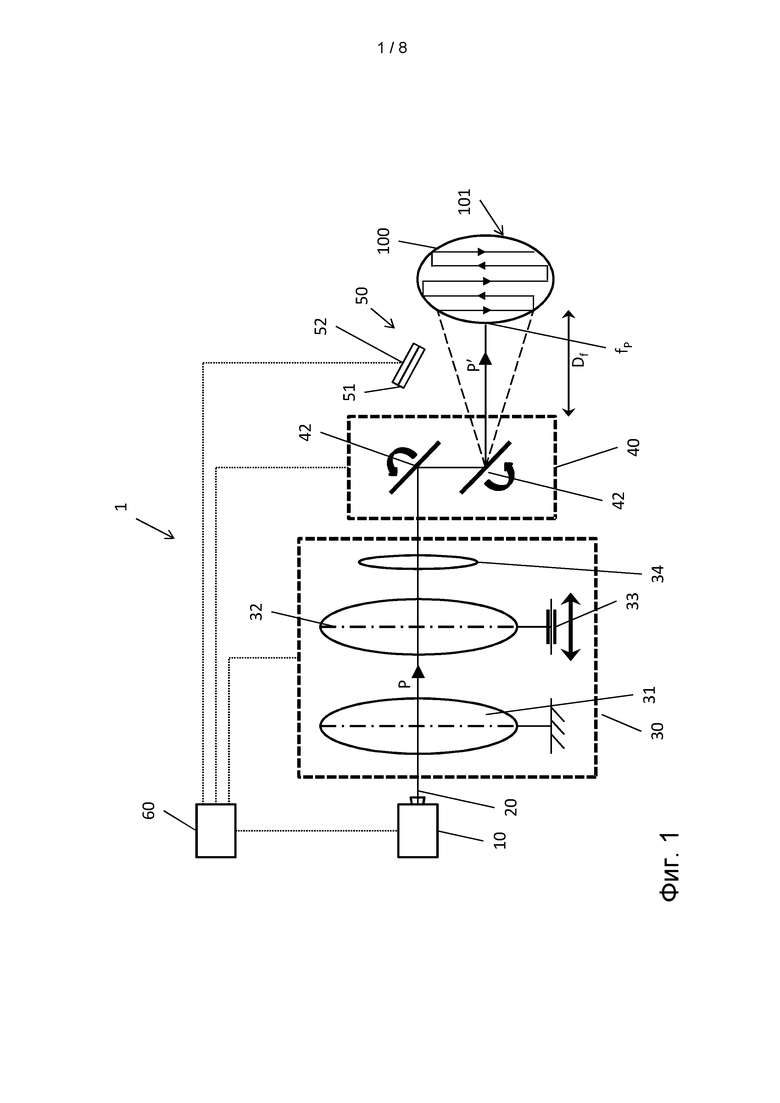
На Фиг. 1 схематически изображен вариант реализации ручного импульсного лазерного устройства, как правило, обозначаемого ссылочным обозначением 1. Устройство 1, в частности, выполнено с возможностью удаления поверхностного слоя загрязнения с основы 100, например, удаления слоя окисла или органических отложений с металлической поверхности.
Следует отметить, что на всех фигурах устройство 1 представлено схематически, и что фигуры предназначены для получения представления о том, какие признаки могут быть объединены для достижения технического эффекта изобретения.
Импульсное лазерное устройство 1, изображенное на Фиг. 1, содержит лазерный источник 10, который выполнен с возможностью излучения лазерного луча 20, проецируемого из источника 10 в направлении (Р) проецирования. В настоящем варианте реализации источник 10 содержит оптические элементы и средства управления, так что излучаемый луч 20 имеет плотность энергии, которой достаточно для достижения требуемого взаимодействия между лучом 20 и поверхностью 101 основы 100. Лазерный источник 10 установлен на неподвижной опорной раме устройства 1, на которой установлены также другие компоненты, чтобы обеспечивать относительное положение между компонентами.
Источник 10 выполнен с возможностью излучения как непрерывного луча, так и импульсного лазерного луча 20. В частности, было установлено, что импульсный лазерный луч 20 обеспечивает достаточную степень очистки поверхности 101. При проецировании такого импульсного луча 20 источник 10 выполнен с возможностью периодического прерывания проецирования луча 20 для придания ему импульсного характера. В одном варианте реализации лазерный источник 10 может иметь мощность от 10 до 1000 Вт, тогда как энергия импульса может составлять от 1 до 100 мДж.
После того, как луч 20 был излучен источником 10, он проходит через регулятор 30 фокусного расстояния устройства 1. В настоящем варианте реализации регулятор 30 фокусного расстояния содержит три оптических элемента, благодаря которым он выполнен с возможностью изменения определенных свойств луча 20, а также регулировки фокусного расстояния (Df), определяемого между устройством 1 и поверхностью 101 основы 100.
В регуляторе 30 фокусного расстояния луч 20 сначала проходит через линзу 31, которая неподвижна относительно лазерного источника 10. Неподвижная линза 31 представляет собой двояковыпуклую линзу, содержащую две выпуклые наружные поверхности на противоположных сторонах, наблюдаемые вдоль направления (Р) распространения. Неподвижная двояковыпуклая линза 31 выполнена с возможностью сужения лазерного луча 20 для достижения сходящегося лазерного пучка. Как известно, такой сходящийся пучок имеет фокусную точку, в которой мощность лазера на единицу проецируемой площади наибольшая. Фокусная точка лежит перед линзой, которая сводит луч в одну точку, если смотреть вдоль направления распространения.
Понятно, что в альтернативных вариантах реализации могут быть предусмотрены другие неподвижные линзы для дополнительного фокусирования луча и дополнительного сужения пучка. В альтернативном варианте реализации регулятор фокусного расстояния может содержать одну или более двояковогнутых линз, которые имеют две вогнутые наружные поверхности, и которые выполнены с возможностью разведения лазерного пучка.
Регулятор 30 фокусного расстояния также содержит подвижный оптический элемент 32, который выполнен с возможностью перемещения посредством пьезоэлемента 33. Подвижный оптический элемент 32, представляет собой, подобно фиксированной линзе 31, двояковыпуклую линзу 32, которая выполнена с возможностью перемещения относительно лазерного источника 10 в направлении назад и вперед, которое параллельно направлению (Р) проецирования луча 20 через линзу 32.
Между подвижной линзой 32 и элементом опорной рамы, который неподвижно соединен с источником 10, предусмотрен пьезоэлемент 33. Пьезоэлемент 33 выполнен с возможностью перемещения линзы 32 относительно источника 10 в направлении, параллельном направлению (Р) проецирования луча 20. При перемещении подвижной линзы 32 фокусная точка (fp) луча 20 сдвигается соответствующим образом, что приводит к изменению фокусного расстояния (Df). При условии, что устройство 1 остается неподвижным относительно основы 100, тем самым изменяется положение фокусной точки (fp) относительно основы 100.
С помощью регулятора 30 фокусного расстояния можно перемещать фокусную точку (fp) так, чтобы она лежала сверху поверхности 101, которую нужно очистить. Энергия луча 20 и, в частности, плотность энергии, которая представляет собой энергию на единицу проецируемой площади, концентрируется на поверхности 101, и там локализуется наивысшее возможное количество энергии.
Пьезоэлемент 33 содержит деталь из пьезоэлектрического материала, которая деформируется при приложении к ней электрического напряжения. В настоящем варианте реализации пьезоэлемент 33 одним своим концом прикреплен к опорной раме. Деформация материала под действием электрического напряжения вызовет изменение длины пьезоэлемента 33. Подвижная линза 32 прикреплена ко второму концу пьезоэлемента 33, противоположному первому концу, и будет перемещаться вместе со вторым концом при деформации пьезоэлемента 33.
Наличие пьезоэлемента 33 позволяет перемещать подвижную линзу 32 относительно быстро и надежно. Это объясняется прежде всего тем фактом, что при наличии пьезоэлемента 33 фактически не требуется никаких других элементов, таких как силовые передачи и т.д. Кроме того, пьезоэлементы 33 меньше страдают от износа ввиду отсутствия подвижных деталей.
В альтернативных вариантах реализации, тем не менее, для инициирования линейного возвратно-поступательного движения подвижной линзы могут быть использованы линейные исполнительные механизмы других типов.
Регулятор 30 фокусного расстояния также содержит матричную линзу 34, которая, если смотреть вдоль направления (Р) проецирования, расположена позади неподвижной линзы 31 и подвижной линзы 32. Матричная линза 34 выполнена с возможностью преобразования гауссовского лазерного луча, имеющего спектр с гауссовским распределением длин волн, в однородный лазерный пучок, являющийся по существу монохроматическим. Поэтому нет необходимости в том, чтобы луч 20, который формируется в источнике 10, был уже монохроматическим, т.к. для такого преобразования может быть предусмотрена матричная линза 34.
После того, как лазерный луч 20 прошел через регулятор 30 фокусного расстояния, его направляют через дефлектор 40 луча, который, если смотреть вдоль направления (Р) проецирования, расположен на выходе регулятора 30 фокусного расстояния.
В настоящем варианте реализации дефлектор 40 луча содержит первое зеркало 41 с изменяемым углом наклона и второе зеркало 42 с изменяемым углом наклона. Каждое из зеркал 41, 42 имеет отражающую зеркальную поверхность и является по существу плоским, так что угол падения луча 20 на поверхность зеркала равен углу отражения луча 20 от поверхности зеркала. Дефлектор 40 луча выполнен с возможностью отклонения луча 20 с помощью зеркал 41, 42 таким образом, что направления (Р) проецирования луча 20 до вхождения в дефлектор 40 луча может отличаться от направления (Р') проецирования луча 20 после его выхода из дефлектора 40 луча.
Понятно, что в альтернативном варианте реализации дефлектор луча может содержать другие подвижные оптические элементы, с помощью которых можно отклонять луч. Например, могут быть предусмотрены линзы с изменяемым углом наклона, которыми можно отклонять луч и одновременно фокусировать.
Зеркала 41, 42 прикреплены с возможностью изменения угла наклона к опорной раме устройства 1. При этом первое зеркало 41 выполнено с возможностью изменения угла наклона вокруг первой оси относительно рамы. Второе зеркало 42 выполнено с возможностью изменения угла наклона вокруг второй оси, причем вторая ось ориентирована перпендикулярно первой оси.
В нейтральном положении обоих зеркал 41, 42, показанном на Фиг. 1, зеркальные поверхности обоих зеркал 41, 42 ориентированы навстречу друг другу. Угол падения луча 20 на зеркальную поверхность первого зеркала 41 составляет 45°. В результате направление (Р') проецирования луча 20 после дефлектора 40 луча ориентировано параллельно направлению (Р) проецирования перед дефлектором 40 луча.
Например, при наклонении первого зеркала 41 из его нейтрального положения угол падения луча 20 на зеркальную поверхность первого зеркала 41 изменяется. В результате угол отражения луча 20 от первого зеркала 41 тоже изменяется. Соответственно, положение, в котором луч 20 проецируется на второе зеркало 42, изменяется точно так же, как углы падения и отражения от его зеркальной поверхности. Таким образом, направление (Р') проецирования луча 20 после дефлектора 40 луча изменяется, что в конечном счете приводит к сдвигу луча 20 вдоль поверхности 101.
В настоящем варианте реализации каждое из зеркал 41, 42 установлено на опорной раме посредством оси, которая установлена с возможностью изменения угла наклона в раме. Дефлектор 40 луча может содержать первый исполнительный механизм и второй исполнительный механизм, которые, соответственно, выполнены с возможностью вызова наклоняющего движения первого зеркала 41 и второго зеркала 42.
В альтернативном варианте реализации дефлектор луча может содержать одно зеркало с изменяемым углом наклона. Для достижения такой же по меньшей мере двухмерной схемы на поверхности это единственное зеркало выполнено с возможностью изменения угла наклона вокруг двух перпендикулярных осей посредством двух исполнительных механизмов. В еще одном альтернативном варианте реализации единственное зеркало содержит шесть исполнительных механизмов, с помощью которых можно обеспечивать изменение ориентации зеркала с шестью степенями свободы.
После дефлектора 40 луча лазерный луч 20 выходит из устройства 1 для проецирования на поверхность 101 основы 100.
Устройство 1 содержит два датчика 50, первый из которых является датчиком 51 расстояния, причем датчик 51 расстояния направлен на основу 100 и выполнен с возможностью передачи сигнала, который представляет расстояние между устройством 1 и основой 100. Датчик 51 расстояния тоже установлен на опорной раме, чтобы относительное расстояние от датчика 51 расстояния до других компонентов в устройстве 1 было фиксированным.
Датчик 51 расстояния выполнен с возможностью измерения расстояния между основой 100 и самим датчиком 51, которое благодаря фиксированному положения датчика 51 в устройстве 1 является мерой расстояния между устройством 1 и основной 100.
Устройство 1 также содержит блок 60 управления, который посредством электроники соединен с лазерным источником 10, регулятором 30 фокусного расстояния и дефлектором 40 луча. Блок 60 управления выполнен с возможностью управления этими компонентами во время эксплуатации устройства 1. Блок 60 управления может также содержать пользовательский интерфейс, с помощью которого оператор может устанавливать в блоке 60 управления параметры, на основе которых можно управлять лазерным источником 10, регулятором 30 фокусного расстояния и дефлектором 40 луча.
Блок 60 управления выполнен с возможностью установки параметров для лазерного источника 10, чтобы лазерный луч 20, который излучается источником 10, мог иметь оптимальные свойства для очистки поверхности 101 основы 100 в конкретной ситуации. Блок 60 управления может, например, устанавливать надлежащие значения для частоты импульсов или плотности энергии лазерного луча 20.
Блок 60 управления также выполнен с возможностью управления регулятором 30 фокусного расстояния, чтобы проецировать фокусную точку (fp) луча 20 на поверхность 101 основы 100.
Кроме того, регулятор 30 фокусного расстояния выполнен с возможностью применения, под управлением блока 60 управления, колебательного изменения к подвижной линзе 32. Колебательное изменение - это изменение положения подвижной линзы 32 вдоль направления (Р) проецирования. Так же, как и во время установки фокусного расстояния, колебательное изменение вызывают приведением в действие пьезоэлемента 33 при его деформации.
Блок 60 управления также выполнен с возможностью управления дефлектором 40 луча для проецирования схемы на поверхность 101. На основе значений параметров, которые могут быть установлены в блоке 60 управления оператором, блок 60 управления может выбирать подходящие значения для формы проецируемой схемы, для частоты сканирования или для расстояния между соседними лазерными импульсами на поверхности 101.
Кроме того, блок 60 управления посредством электроники соединен с датчиком 51. Благодаря чему датчик 51 расстояния выполнен с возможностью передачи сигнала, представляющего расстояние между устройством 1 и поверхностью 101, в блок 60 управления.
На основе сигнала с датчика 51 расстояния блок 60 управления может, например, также управлять регулятором 30 фокусного расстояния в том случае, если установленное значение для фокусного расстояния в регуляторе 30 фокусного расстояния не соответствует измеряемому фокусному расстоянию (Df). Таким образом, блок управления выполнен с возможностью вычисления разницы между установленным и измеряемым фокусным расстоянием и может управлять регулятором 30 фокусного расстояния для сведения к минимуму этой разницы.
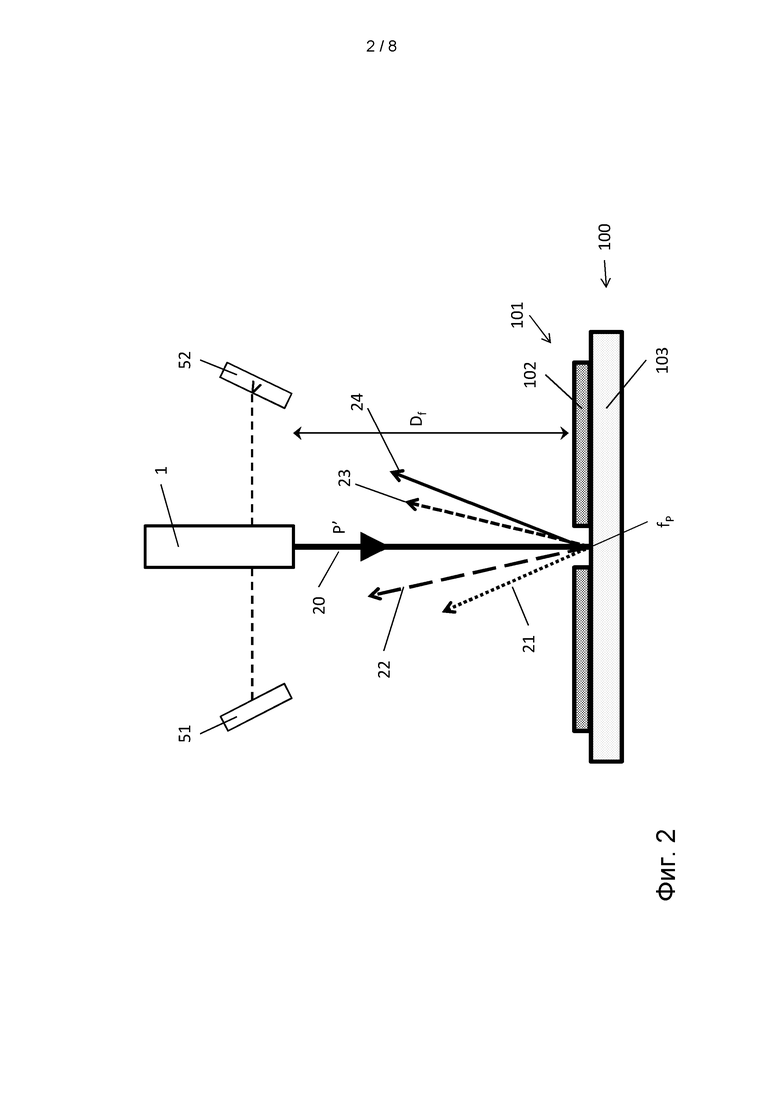
Далее обратимся к Фиг. 2, на которой также изображен вариант реализации устройства 1, содержащего датчик 51 расстояния и датчик 52 спектрального анализа. Датчик 51 расстояния и датчик 52 спектрального анализа оба направлены на поверхность 101 основы 100 и оба электрически соединены с блоком 60 управления, который расположен внутри устройства 1.
Во время очистки поверхности 101 устройством 1 лазерный луч 20 проецируют на поверхность 101 для испарения и/или окисления верхнего слоя 102 на поверхности 101. В связи с этим устройство 1 и, в частности, блок 60 управления устройства 1 выполнены с возможностью управления параметрами лазера так, чтобы подповерхностный слой 103 основы 100 оставался невредимым.
Когда лазерным лучом 20 сканируют вдоль поверхности 101, с поверхности 101 испускает обратно излучение. Испускаемое излучение может быть измерено с помощью датчика 52 спектрального анализа, и блок 60 управления может построить распределение длин волн испускаемого излучения. В распределении отображается измеряемая интенсивность излучения для определенных диапазонов длин волн.
Испускаемое излучение содержит первую часть, представляющую собой излучение, отражаемое обратно от поверхности в виде инфракрасного излучения 21. Инфракрасное излучение 21 происходит непосредственно из лазерного луча 20 ввиду отсутствия какого-либо другого взаимодействия между поверхностью 101 и лучом 20, кроме отражения. Поэтому длина волны инфракрасного излучения 21 соответствует длине волны лазерного луча 20.
Вторая часть испускаемого излучения содержит излучение 22 теплового происхождения, представляющее собой излучение, которое испускает поверхность 101 вследствие ее нагревания.
Третья часть испускаемого излучения содержит плазменное свечение 23, длина волны и интенсивность которого представляют тип металла, окисляющегося во время очистки. Если, например, верхний слой 102, представляющий собой органическое загрязнение, окисляется, профиль длин волн будет не таким, как, например, при окислении железного подповерхностного слоя 103.
Четвертая часть испускаемого излучения содержит видимый свет 24, профили интенсивности и длин волн которого тоже представляют тип окисляемых элементов.
Блок 60 управления также выполнен с возможностью управления лазерным источником 10, регулятором 30 фокусного расстояния и дефлектором 40 луча на основе профилей интенсивностей и длин волн, которые измеряются датчиком 52 спектрального анализа. Например, когда интенсивность излучения 22 теплового происхождения становится слишком высокой, блок 60 управления принимает решение снизить плотность энергии лазерного луча 20, чтобы предотвратить существенное нагревание подповерхностного слоя 103.
На Фиг. 3А-3Е показаны схемы лазерного луча, проецируемые из импульсного лазерного устройства 1 на поверхность, если смотреть сверху перпендикулярно поверхности. Схему повторно проецируют на поверхность до тех пор, пока оператор не сможет принять решение об остановке работы устройства 1.
Помимо сканирующего движения луча для формирования схемы лазерное устройство 1 в целом тоже может перемещаться, например оператором. В частности, при использовании этого ручного устройства оператор может направлять проецируемую схему вдоль поверхности, инициируя относительное перемещение между устройством 1 и поверхностью. В случае проецируемых схем, изображенных на Фиг. 3А-3Е, относительное перемещение между устройством 1 и поверхностью происходит в направлении (Dp) продвижения.
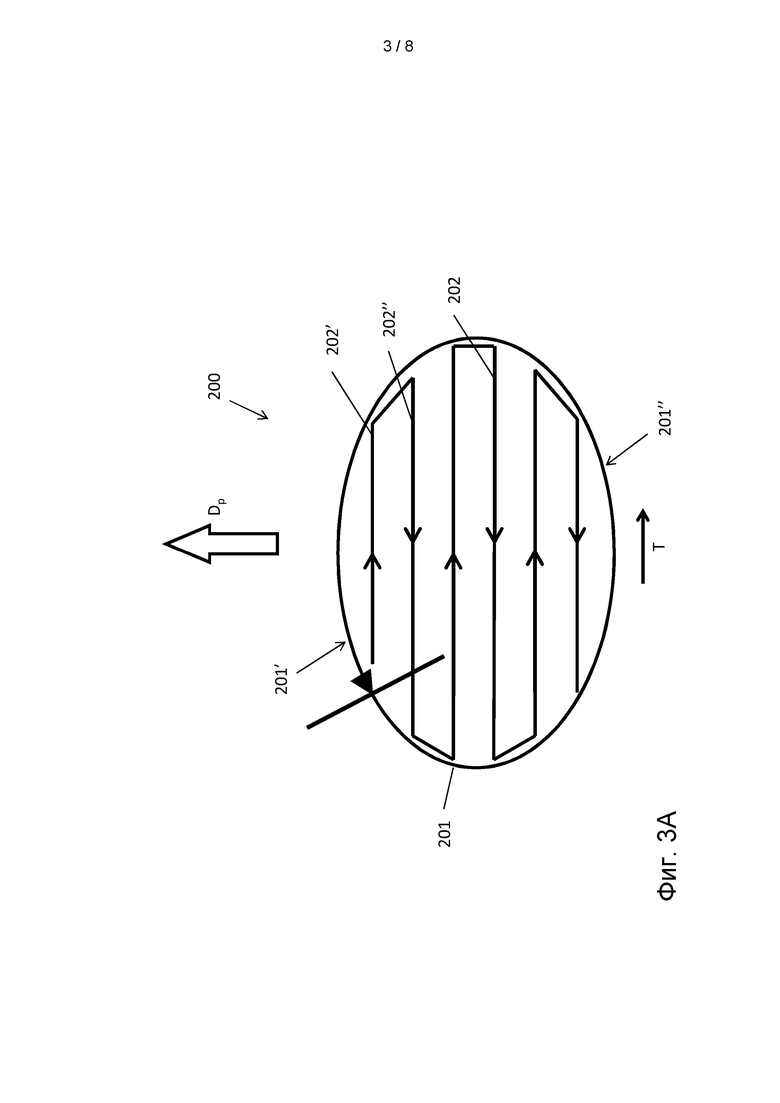
На Фиг. 3А показана первая проецируемая схема 200. Во время сканирования по указанной схеме 200 на поверхности сначала описывают эллипсоидный внешний контур 201. После этого внешний контур 201 заполняют посредством возвратно-поступательного сканирующего движения. Луч выполнен с возможностью описывания, во время возвратно-поступательного сканирующего движения, множества линейных проходов 202 на поверхности. Линейные проходы 202 ориентированы перпендикулярно направлению (Dp) продвижения и пролегают между линиями внешнего контура 201 по существу по всей ширине внешнего контура 201.
После описывания внешнего контура 201 лазерный луч отклоняется к верхней части 201' внешнего контура 201, чтобы начать его заполнение с помощью линейных проходов 202. После того, как первый линейный проход 202' описан лазером в поперечном направлении (Т), луч перемещается вдоль поверхности параллельно направлению продвижения (Dp). Затем луч отклоняется для описывания второго линейного прохода 202'' в направлении, противоположном поперечному направлению (Т). Это переключение между последовательными линейными проходами 202 повторяют до тех пор, пока не будет достигнута нижняя часть 201'' внешнего контура 201. Затем описывают еще один внешний контур и сканирование повторяют.
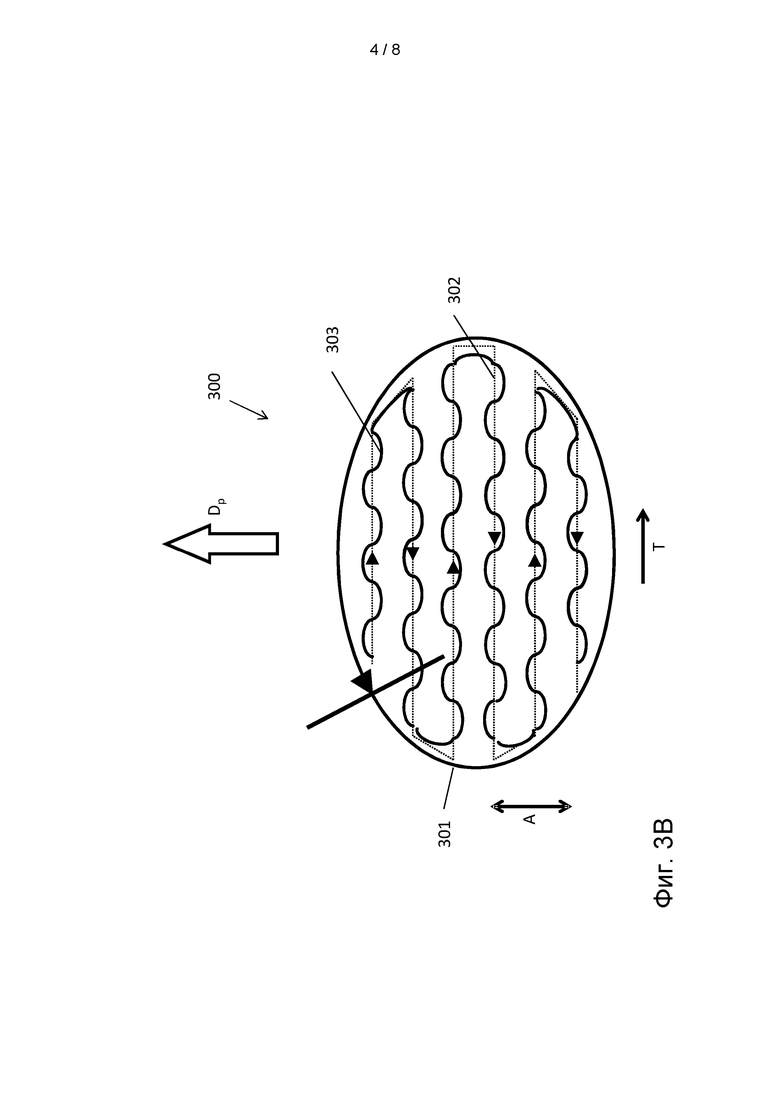
На Фиг. 3В показана вторая проецируемая схема 300, причем сначала лазерным лучом проецируют ее внешний контур 301 на поверхность. После того, как контур 301 был проецирован, его тоже заполняют линейными проходами 302 посредством возвратно-поступательного сканирующего движения лазерного луча.
Однако линейные проходы 302 совмещают с синусоидальной схемой 303, которую проецируют посредством колебательного движения луча в направлении (А) амплитуды, параллельном направлению (Dp) продвижения. Путем совмещения линейных проходов 302 с синусоидальной схемой 303 можно вызывать пульсирующие напряжения в слое загрязнения, который нужно удалить с поверхности. Эти пульсирующие напряжения порождаются температурными градиентами в слое загрязнения, которые могут привести к локальному тепловому расширению и тепловому сжатию и вызовут коробление поверхностного слоя. Таким образом, синусоидальная схема 303 может повысить степень очистки.
Понятно, что для получения улученного очищающего эффекта вместо синусоидальной схемы с линейными проходами также могут быть совмещены другие волнообразные схемы.
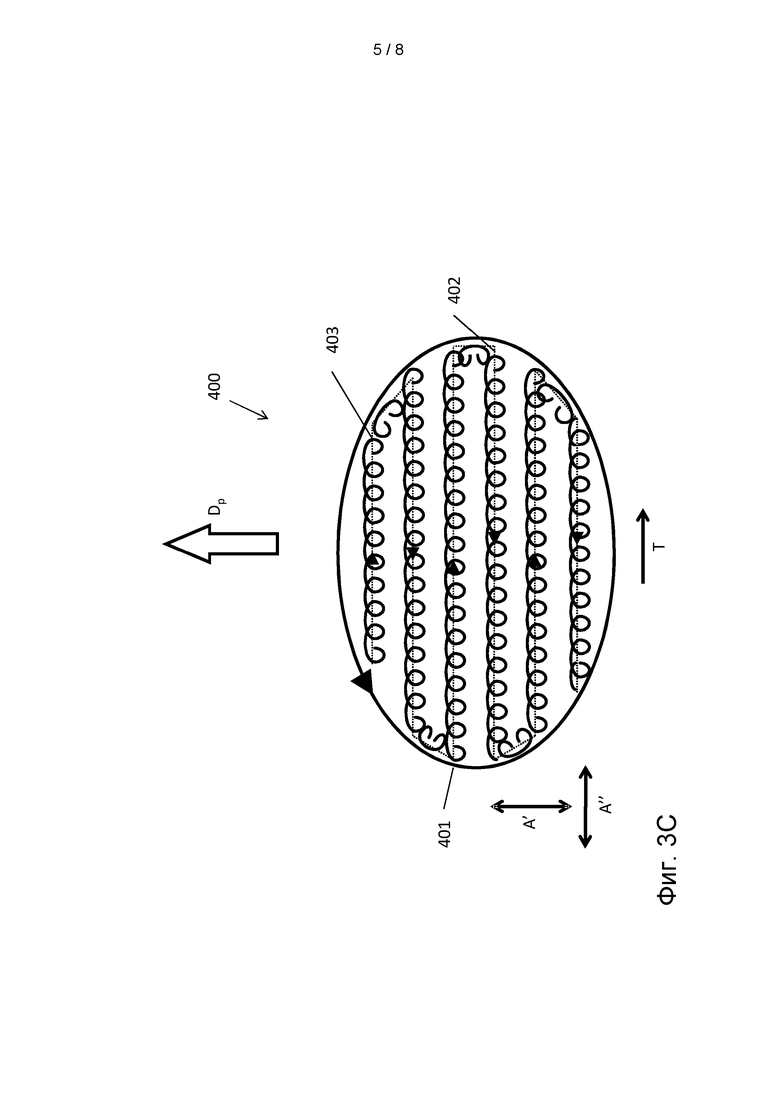
На Фиг. 3С показан третья проецируемая схема 400. Аналогично второй проецируемой схеме 300 лазерным лучом описывают внешний контур 401, который заполняют возвратно-поступательным сканирующим движением луча, описывающим линейные проходы 402. В отличие от второй проецируемой схемы 300, в третьей проецируемой схеме 400 линейные проходы 402 совмещают со спиральной схемой 403. Спиральную схему 403 проецируют посредством колебательного движения луча в двух направлениях (А', А'') амплитуды.
Предпочтительно два направления (А', А'') амплитуды ориентированы перпендикулярно друг другу. В проецируемой схеме 400 на Фиг. 3С первое направление (А') амплитуды ориентировано параллельно направлению (Dp) продвижения, тогда как второе направление амплитуды (А'') ориентировано параллельно поперечному направлению (Т), перпендикулярному первому направлению (А') амплитуды и перпендикулярному направлению (Dp) продвижения.
На Фиг. 3D показана четвертая проецируемая схема 500. Четвертая проецируемая схема 500 аналогична первой проецируемой схеме 100, которая показана на Фиг. 3А, но содержит внешний контур 501 прямоугольной формы. Поэтому две из четырех проецируемых линий, которые образуют прямоугольный внешний контур 501, ориентированы параллельно направлению (Dp), продвижения, тогда как две другие линии прямоугольного внешнего контура 501 ориентированы параллельно поперечному направлению (Т).
Проецирование прямоугольного внешнего контура 501, заполняемого линейными проходами 502, обеспечивает преимущество, заключающееся в том, что луч нужно одновременно отклонять только вдоль одного из направления (Dp) продвижения и поперечного направления (Т). В случае, например, эллипсоидного внешнего контура требуется одновременное отклонение луча вдоль обоих направлений, направления (Dp) продвижения и поперечного направления (Т), что может потребовать более совершенных исполнительных механизмов дефлектора луча или более сложного управляющего программного обеспечения в блоке управления.
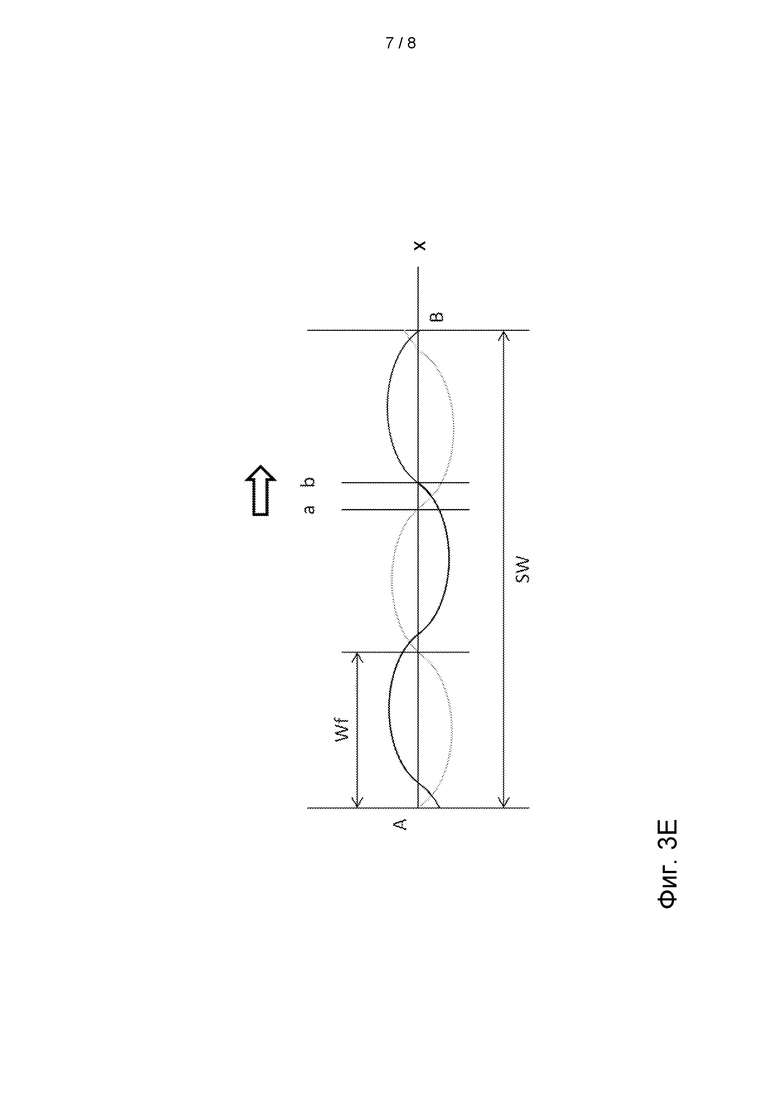
На Фиг. 3Е показана проецируемая схема лазерного луча на поверхности. С помощью дефлектора луча лазерный луч направляют для описывания возвратно-поступательного сканирующего движения по всей ширине сканирования (SW). Сканирующее движение содержит первый синусоидальный проход (А), который продвигается в первом направлении, и второй синусоидальный проход (В), который продвигается во втором направлении, противоположном первому направлению.
Первая синусоида (А) и вторая синусоида (В) имеют длину (Wf) полуволны, а ширина (SW) сканирования установлена не равной в точности множеству длин (Wf) полуволн. Этим достигается сдвиг по фазе первой синусоиды (А) относительно второй синусоиды (В). Таким образом, может быть создана спиралевидная форма волны, которая распространяется в первом и/или втором направлении. Это можно увидеть на Фиг. 3Е, на которой показано, что первый синусоидальный проход (А) пересекает ось (х) продвижения в первой точке (а) пересечения, тогда как второй синусоидальный проход (В) пересекает ось (х) продвижения во второй точке (b) пересечения, причем вторая точка (b) пересечения не совпадает с первой точкой (а) пересечения.
Этим достигается то, что узловые точки схемы, в которых последующие первый и второй проходы (А, В) сканирования пересекаются, находятся не в фиксированном местоположении на поверхности, а эти узловые точки перемещаются вдоль поверхности, которая указана стрелкой на Фиг. 3Е. Благодаря перемещению узловых точек с относительно высокой плотностью энергии вдоль поверхности подводимая внутрь поверхности энергия распространяется лучше, что делает возможным боле равномерный очищающий эффект и улучшенное распространение по всей поверхности.
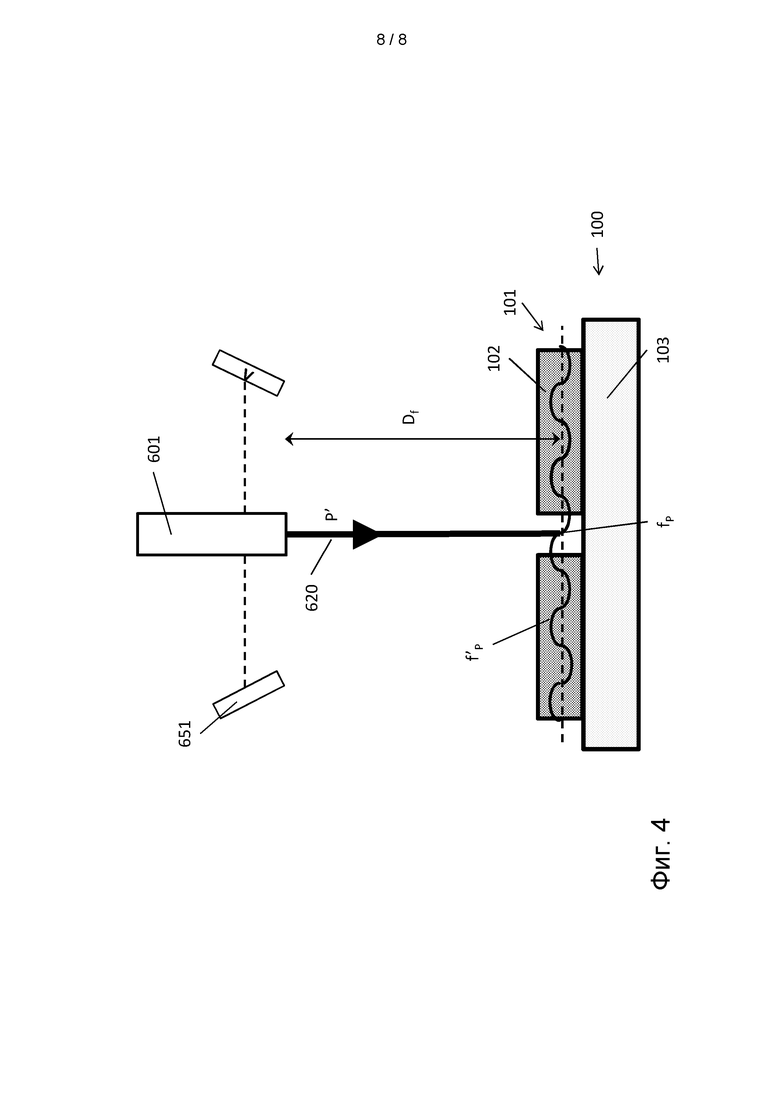
На Фиг. 4 показан еще один вариант реализации лазерного очищающего устройства в соответствии с настоящим изобретением. Устройство 601 показано в рабочем состоянии, когда оно проецирует лазерный луч 620 на подлежащую очистке поверхность 101 основы 100 для удаления верхнего слоя 102 загрязнения с подповерхностного слоя 103.
Фокусное расстояние (Df) луча 620 регулируется регулятором фокусного расстояния в устройстве 601 так, что фокусная точка (fp) луча 620 лежит на поверхности 101. Устройство 601 выполнено с возможностью измерения посредством датчика 651 расстояния относительного расстояния между устройством 601 и поверхностью 101 и выполнено с возможностью регулирования фокусного расстояния (Df) на основе измеряемого относительного расстояния.
Устройство 601 выполнено с возможностью синусоидального изменения фокусного расстояния (Df) луча 620 во время сканирования лучом 620 по поверхности 101, как показано на Фиг. 4 с помощью синусоидально изменяющейся фокусной точки (fp). Таким образом, регулятор фокусного расстояния выполнен с возможностью периодического изменения фокусного расстояния (Df), причем амплитуда этого изменения, параллельная направлению (Р') проецирования луча 620, относительно мала по сравнению с фокусным расстоянием (Df).
За счет периодического изменения фокусного расстояния (Df) можно увеличивать эффективное фокусное расстояние устройства 601. Это может привести к тому, что нарушения положения устройства 601 относительно поверхности 101 не будут оказывать значительного влияния на работу лазера. Определенное количество движения устройства 601 в руках оператора становится допустимым, при этом очистка поверхности 101 устройством 601 остается достаточной.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ ОПТИЧЕСКИХ ЭФФЕКТОВ И УСТРОЙСТВО "ЛАЗЕРНЫЙ КАЛЕЙДОСКОП" ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2095682C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| МНОГОЛУЧЕВОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО | 2008 |
|
RU2430390C1 |
| СИСТЕМА И СПОСОБ ПРОЕЦИРОВАНИЯ НА ГЛАЗ | 2016 |
|
RU2728799C2 |
| БЛОК ОПТИЧЕСКОГО СКАНИРОВАНИЯ, ПРОЕКТОР ИЗОБРАЖЕНИЙ, ВКЛЮЧАЮЩИЙ В СЕБЯ ЕГО, АВТОМОБИЛЬНОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ НА ВЕТРОВОМ СТЕКЛЕ И МОБИЛЬНЫЙ ТЕЛЕФОН | 2009 |
|
RU2464603C1 |
| СПОСОБ И УСТРОЙСТВО ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2004 |
|
RU2297724C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СПОСОБ ЛАЗЕРНОЙ ОБРАБОТКИ МАТЕРИАЛОВ И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
SU1628365A1 |
| Способ юстировки сегментированного зеркала и устройство для его осуществления | 2019 |
|
RU2712780C1 |
| ПРОЕКЦИОННОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И КОМПЬЮТЕРНАЯ ПРОГРАММА | 2013 |
|
RU2630424C2 |

Изобретение относится к ручному импульсному лазерному устройству (1) для очистки поверхности (100) и способу лазерной очистки поверхности. Устройство содержит лазерный источник (10), регулятор (30) фокусного расстояния и дефлектор (40) луча. Лазерный источник выполнен с возможностью излучения импульсного лазерного луча (20). Регулятор фокусного расстояния выполнен с возможностью изменения фокусного расстояния луча. Дефлектор луча содержит по меньшей мере одно подвижное зеркало (42), посредством которого отклоняется луч, и выполнен с возможностью отклонения луча для сканирования лучом вдоль поверхности. По меньшей мере один датчик (50) выполнен с возможностью обеспечения сигнала датчика, который представляет параметр, относящийся к характеристике поверхности. Блок (60) управления выполнен с возможностью управления на основе сигнала датчика дефлектором луча для сканирования лучом вдоль поверхности по меньшей мере по двухмерной схеме. Технический результат заключается в предотвращении повреждения поверхности под слоем загрязнения за счет точного управления плотностью энергии лазерного луча на поверхности, например, количеством лазерной энергии на единицу площади, т.к. при поддержании этой плотности энергии ниже определенного порогового значения и распространении энергии по всей поверхности, подлежащей очистке, воздействию будет подвергаться только верхний слой загрязнения поверхности. 2 н. и 14 з.п. ф-лы, 4 ил.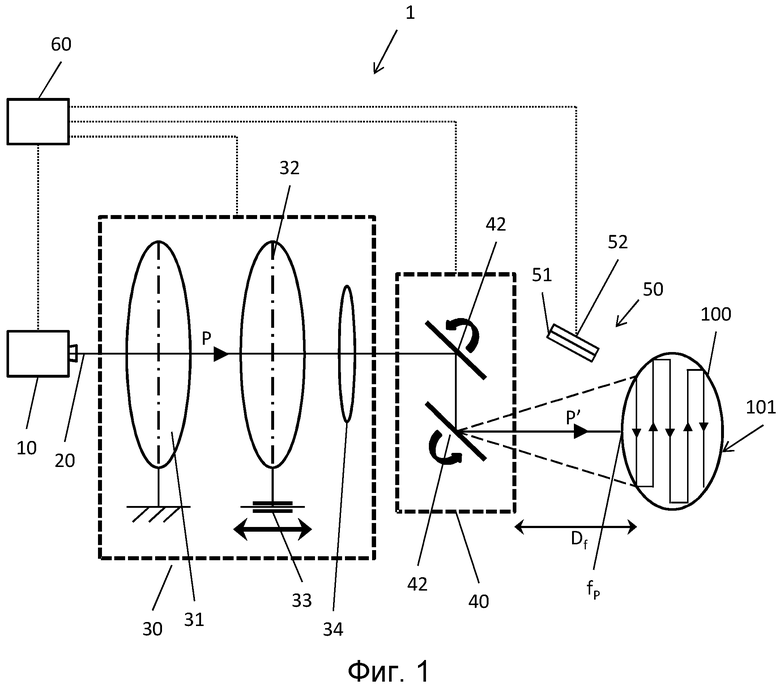
1. Ручное импульсное лазерное устройство для очистки поверхности, содержащее:
- лазерный источник, выполненный с возможностью излучения импульсного лазерного луча,
- регулятор фокусного расстояния, выполненный с возможностью изменения фокусного расстояния луча, и
- дефлектор луча, выполненный с возможностью отклонения луча для сканирования лучом вдоль поверхности,
отличающееся тем, что оно содержит:
- по меньшей мере один датчик, выполненный с возможностью обеспечения сигнала датчика, представляющего параметр, который относится к характеристике поверхности, и
- блок управления, выполненный с возможностью управления на основе упомянутого сигнала датчика, дефлектором луча для сканирования лучом вдоль поверхности по меньшей мере по двухмерной схеме, причем дефлектор луча выполнен с возможностью изменения направления проецирования луча вдоль любой линейной комбинации двух перпендикулярных направлений, которые ориентированы по существу параллельно поверхности, с получением двухмерной схемы сканирования луча на поверхности.
2. Импульсное лазерное устройство по п. 1, в котором указанная схема сканирования луча содержит внешний контур, заполненный посредством возвратно-поступательного сканирующего движения луча в пределах внешнего контура.
3. Импульсное лазерное устройство по п. 2, в котором возвратно-поступательное сканирующее перемещение луча совмещено с синусоидальной схемой.
4. Импульсное лазерное устройство по п. 2, в котором возвратно-поступательное сканирующее перемещение луча совмещено со спиральной схемой.
5. Импульсное лазерное устройство по любому из пп. 1-4, в котором дефлектор луча содержит по меньшей мере одно зеркало, выполненное с возможностью изменения угла наклона вокруг по меньшей мере одной перпендикулярной оси.
6. Импульсное лазерное устройство по любому из пп.1-5, в котором регулятор фокусного расстояния содержит подвижную линзу и пьезоэлемент, выполненный с возможностью перемещения подвижной линзы для регулирования фокусного расстояния луча.
7. Импульсное лазерное устройство по любому из пп. 1-6, в котором по меньшей мере один датчик представляет собой датчик спектрального анализа, выполненный с возможностью обеспечения сигнала, который представляет интенсивности и/или длины волн электромагнитного излучения, испускаемого с поверхности.
8. Импульсное лазерное устройство по любому из пп. 1-6, в котором по меньшей мере один датчик представляет собой датчик расстояния, выполненный с возможностью передачи сигнала, который представляет измеряемое относительное расстояние между устройством и поверхностью.
9. Импульсное лазерное устройство по любому из пп. 1-8, содержащее акселерометр, который выполнен с возможностью передачи сигнала, представляющего ориентацию и/или смещение устройства.
10. Импульсное лазерное устройство по любому из пп. 1-8, в котором регулятор фокусного расстояния выполнен с возможностью изменения фокусного расстояния луча во время очистки поверхности.
11. Импульсное лазерное устройство по п. 10, в котором регулятор фокусного расстояния выполнен с возможностью синусоидального изменения фокусного расстояния луча вокруг измеряемого относительного расстояния.
12. Способ лазерной очистки поверхности с использованием ручного импульсного лазерного очищающего устройства по любому из пп. 1-11, включающий в себя следующие этапы:
- обеспечение с помощью датчика сигнала датчика, представляющего параметр, который относится к характеристике поверхности,
- фокусирование с помощью регулятора фокусного расстояния луча на поверхности, и
- сканирование лучом с помощью дефлектора по поверхности по меньшей мере по двухмерной схеме, причем дефлектор луча выполнен с возможностью изменения направления проецирования луча вдоль любой линейной комбинации двух перпендикулярных направлений, которые ориентированы по существу параллельно поверхности, с получением двухмерной схемы сканирования луча на поверхности.
13. Способ по п. 12, в котором этап сканирования включает повторение следующих этапов:
- перемещение по внешнему контуру схемы, и
- заполняющее возвратно-поступательное сканирующее перемещение луча в пределах внешнего контура схемы.
14. Способ по п. 12 или 13, включающий в себя повторение следующих этапов:
- измерение интенсивностей и/или длин волн электромагнитного излучения, излучаемого с поверхности, и
- управление на основе измеренных интенсивностей и/или длин волн одним или более из:
плотности заполняющего возвратно-поступательного сканирующего перемещения в пределах внешнего контура схемы;
энергии лазерного импульса;
расстояния и/или времени между последовательными лазерными импульсами на поверхности; и
количества лазерных импульсов на единицу площади поверхности.
15. Способ по любому из пп. 12-14, включающий в себя повторение следующих этапов:
- измерение относительного расстояния между устройством и поверхностью,
- управление на основе измеренного расстояния одним или более из:
плотности заполняющего возвратно-поступательного сканирующего перемещения в пределах внешнего контура схемы;
энергии лазерного импульса;
расстояния и/или времени между последовательными лазерными импульсами на поверхности; и
количества лазерных импульсов на единицу площади поверхности.
16. Способ по любому из пп. 12-15, включающий в себя этап периодического, например синусоидального, изменения фокусного расстояния луча.
| US 20150076125 A1, 19.03.2015 | |||
| US 20150076125 A1, 19.03.2015 | |||
| WO 2008118365 A1, 02.10.2008 | |||
| US 5916461 A, 29.06.1999 | |||
| 0 |
|
SU158544A1 | |
| СПОСОБ ЛАЗЕРНОЙ ОЧИСТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2538161C2 |
| СПОСОБ СКАНИРОВАНИЯ ТРУБЫ, ПРЕДНАЗНАЧЕННОЙ ДЛЯ ОБРАБОТКИ НА СТАНКЕ ДЛЯ ЛАЗЕРНОЙ РЕЗКИ, С ИСПОЛЬЗОВАНИЕМ ДАТЧИКА ДЛЯ ИЗМЕРЕНИЯ ИЗЛУЧЕНИЯ, ОТРАЖЕННОГО ИЛИ ИСПУСКАЕМОГО ТРУБОЙ | 2012 |
|
RU2608868C2 |

