ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты осуществления в данном документе относятся в общем к магнитным двигательным системам.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Электродвигатели тока и в частности электродвигатели постоянного тока имеют один или несколько недостатков. Многие типы двигателей не эффективны. Имеются более эффективные модели, но эти двигатели имеют электронные системы управления, которые сложны, затратны или и то, и другое.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0003] Согласно одному варианту осуществления настоящего изобретения, магнитная двигательная система привода содержит первый радиальный магнитный блок (RMA); первый вал, соединенный с первым RMA; первый постоянный магнит первой полярности на наружной поверхности первого RMA; второй RMA; второй вал, соединенный со вторым RMA; первый электромагнит первой полярности на наружной поверхности второго RMA, причем первый постоянный магнит расположен так, чтобы выравниваться с первым электромагнитом во время вращения первого RMA и вращения второго RMA, при этом первый электромагнит активируется при выравнивании с первым постоянным магнитом, при этом первый электромагнит и первый постоянный магнит отталкиваются друг от друга во время активации первого электромагнита и заставляют первый вал и второй вал вращаться; приводной вал, вращаемый в результате поворота первого вала и второго вала; статорный элемент, расположенный рядом с первым постоянным магнитом и вторым постоянным магнитом; и электрический проводящий вывод, соединенный со статорным элементом, выполненный с возможностью получать ток, сгенерированный за счет взаимодействия первого постоянного магнита и второго постоянного магнита со статорным элементом во время вращения первого RMA и вращения второго RMA.
[0004] Согласно другому варианту осуществления настоящего изобретения магнитный двигательный модуль привода содержит первый, второй, третий и четвертый модули привода, расположенные параллельно друг другу в продольном направлении, при этом каждый модуль привода содержит по меньшей мере один блок ротора в сборе, содержащий множество электромагнитов, расположенных и выполненных с возможностью отталкиваться от множества постоянных магнитов на любом смежном из первого, второго, третьего или четвертого модулей привода, отталкивание электромагнитов от постоянных магнитов приводит к возникновению радиальной движущей силы и вращению первого, второго, третьего или четвертого модулей привода; шестерню, соединенную с первым, вторым, третьим и четвертым модулями привода; приводной вал, соединенный с шестерней выходного вала и вращаемый посредством поворота планетарных шестерен, соединенных с первым и третьим или вторым и четвертым модулями привода; статорный элемент, расположенный рядом со множеством постоянных магнитов первой полярности и множеством постоянных магнитов второй полярности; и электрический проводящий вывод, соединенный со статорным элементом, выполненный с возможностью получать ток, сгенерированный за счет взаимодействия множества постоянных магнитов первой полярности и множества постоянных магнитов второй полярности со статорным элементом во время вращения первого, второго, третьего и четвертого модулей привода.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0005] Ниже приведено подробное описание некоторых вариантов осуществления настоящего изобретения со ссылкой на сопроводительные графические материалы, где одинаковые позиции представляют соответствующие части графических материалов.
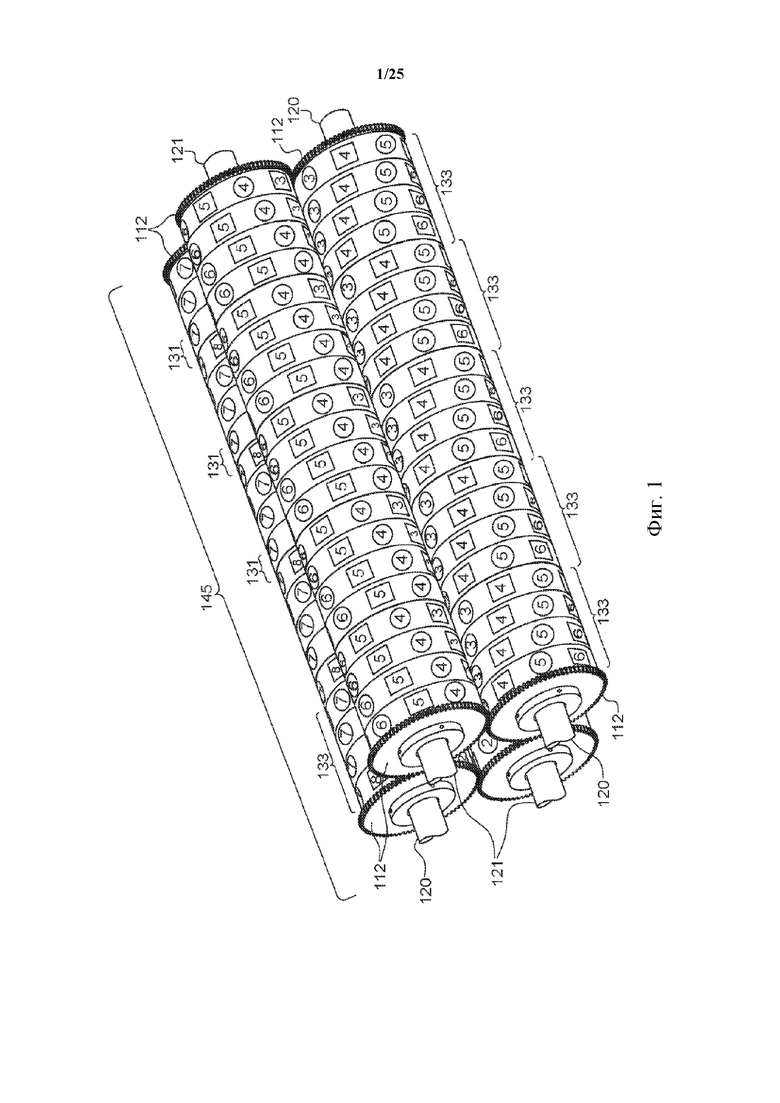
[0006] На фиг. 1 представлен перспективный вид магнитной двигательной системы привода согласно иллюстративному варианту осуществления настоящего изобретения;
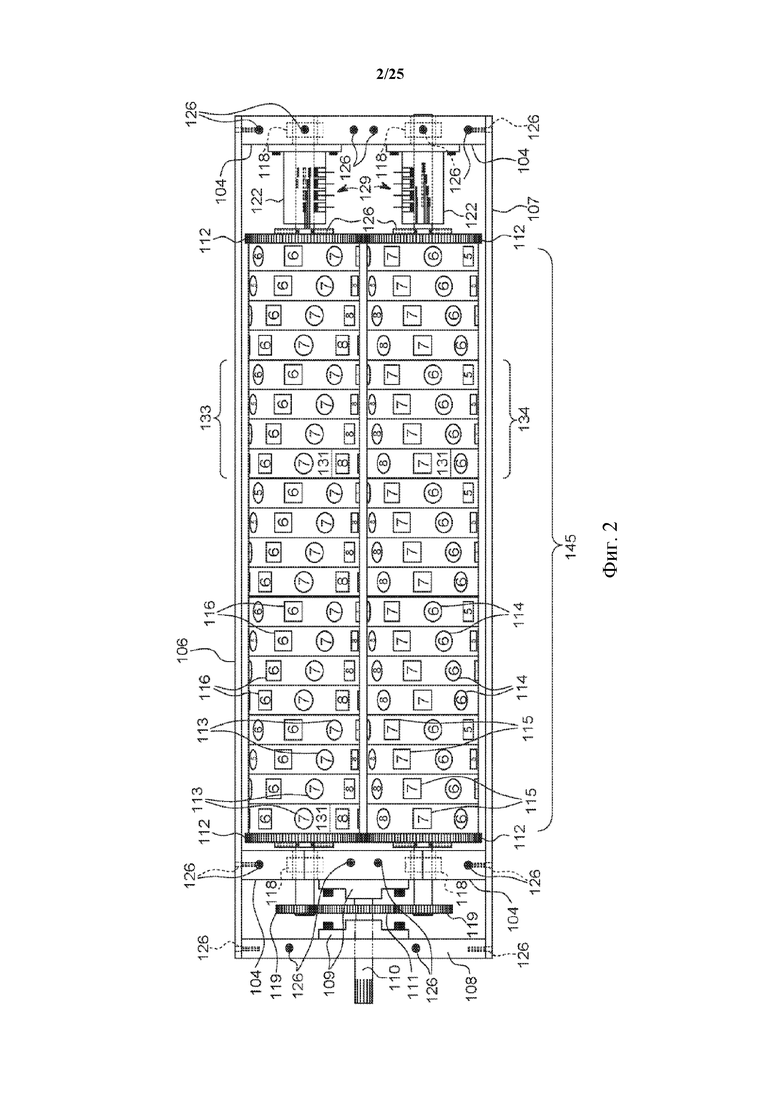
[0007] на фиг. 2 представлен вид сверху магнитной двигательной системы привода, показанной на фиг. 1;
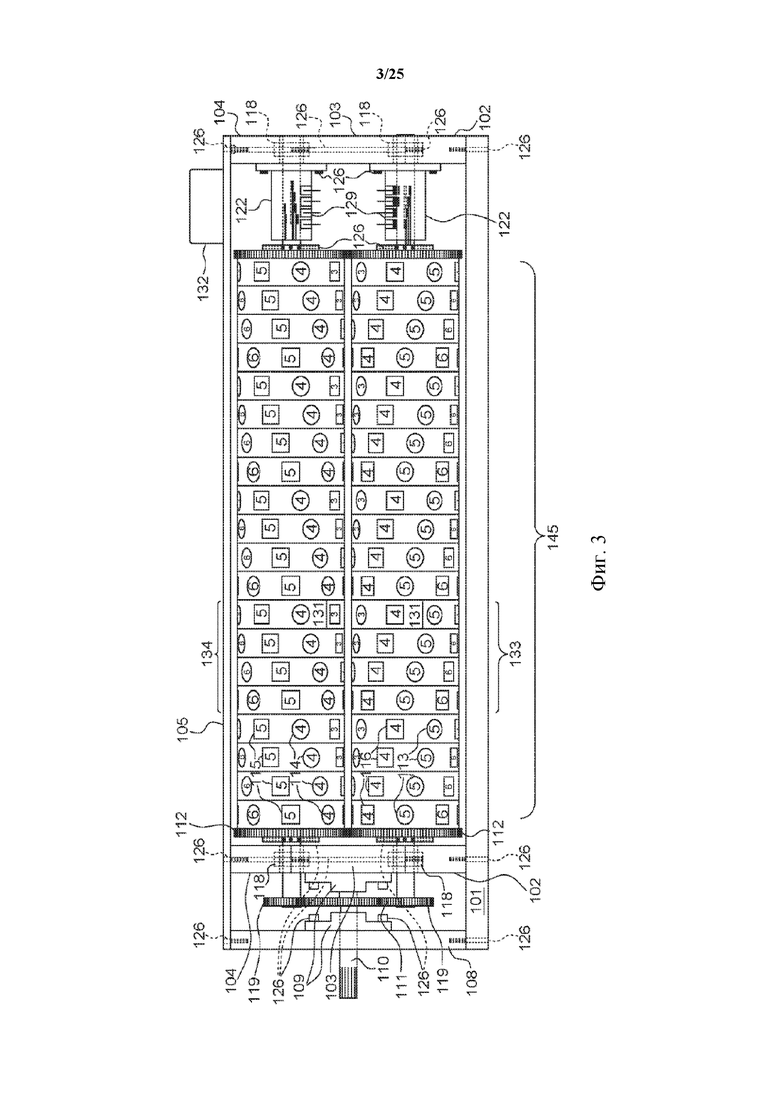
[0008] на фиг. 3 представлен вид справа магнитной двигательной системы привода, показанной на фиг. 1;
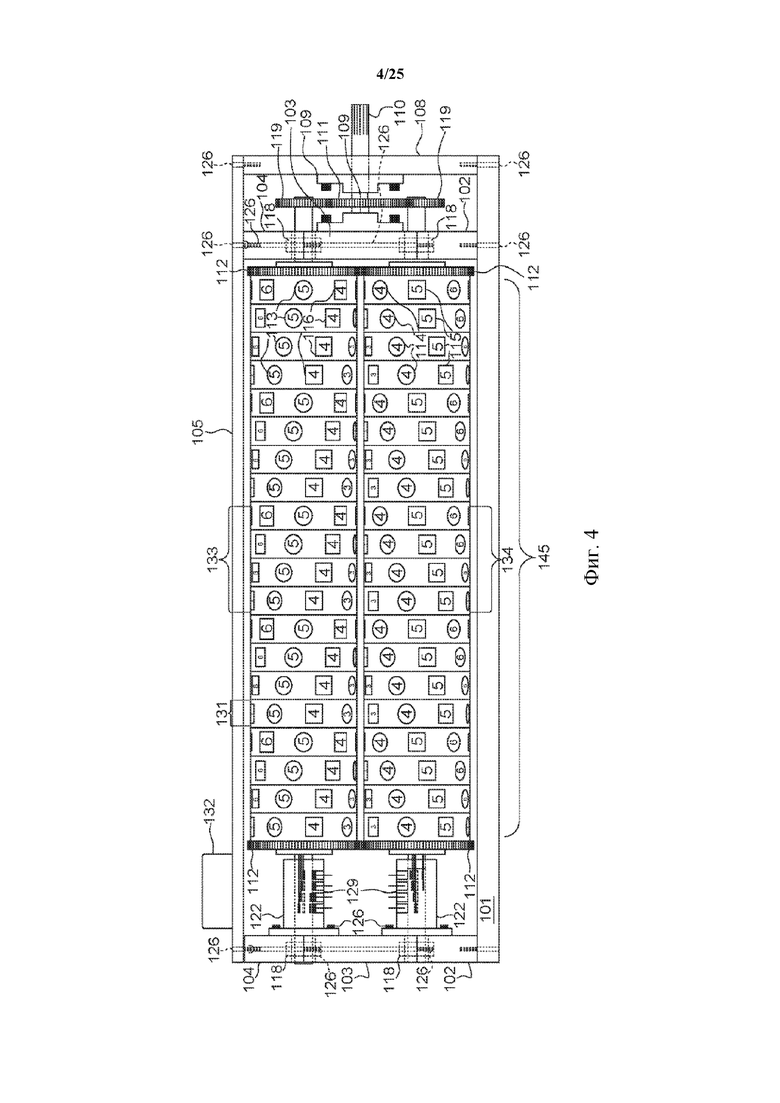
[0009] на фиг. 4 представлен вид слева магнитной двигательной системы привода, показанной на фиг. 1;
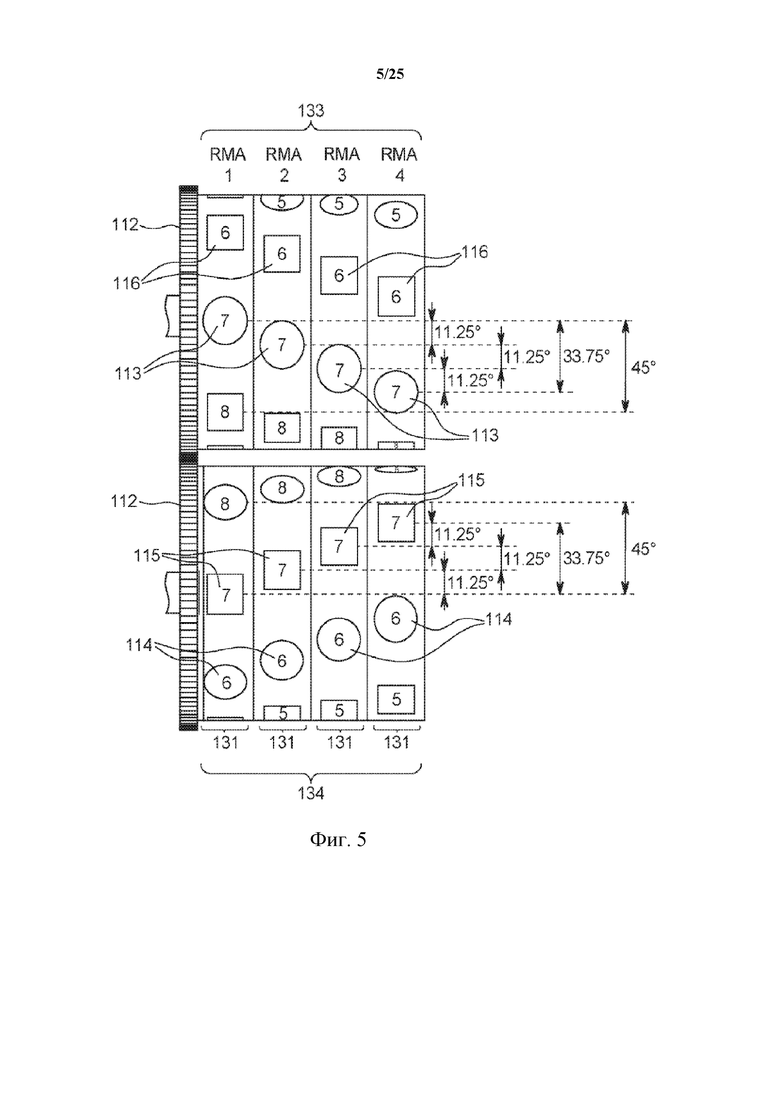
[0010] на фиг. 5 представлен увеличенный частичный вид самых левых радиальных магнитных блоков, показанных на фиг. 2 с видом сверху;
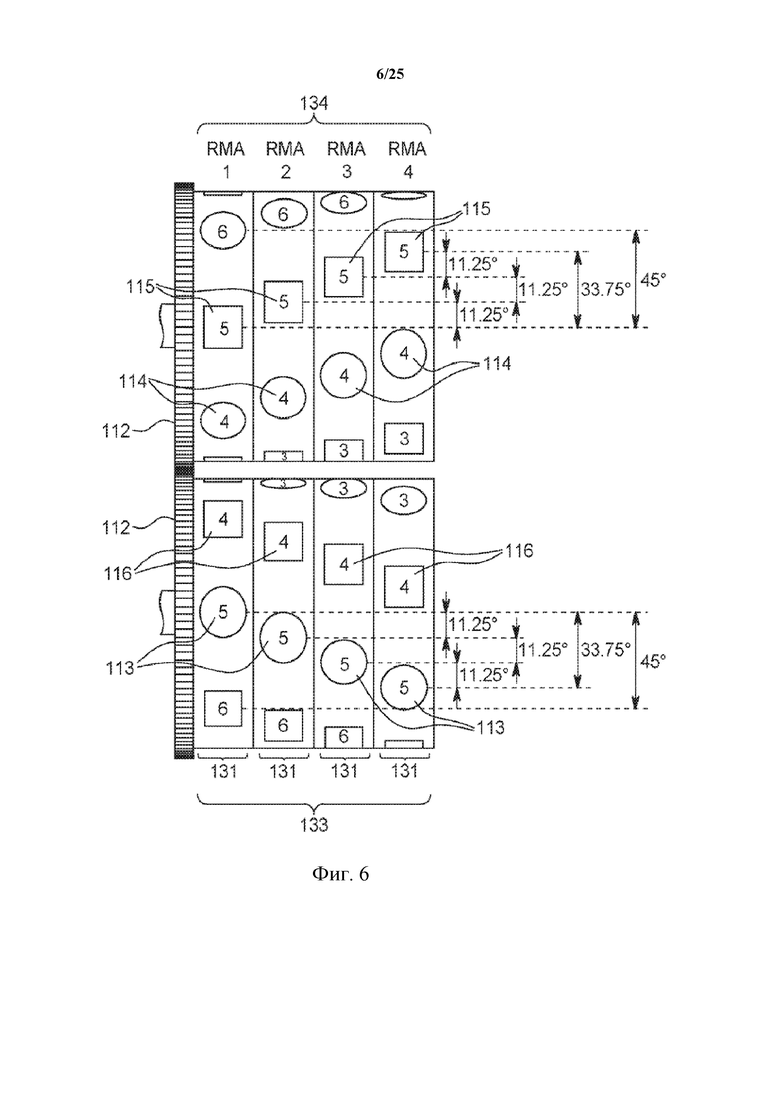
[0011] на фиг. 6 представлен увеличенный частичный вид самых левых радиальных магнитных блоков, показанных на фиг. 3 с видом справа;
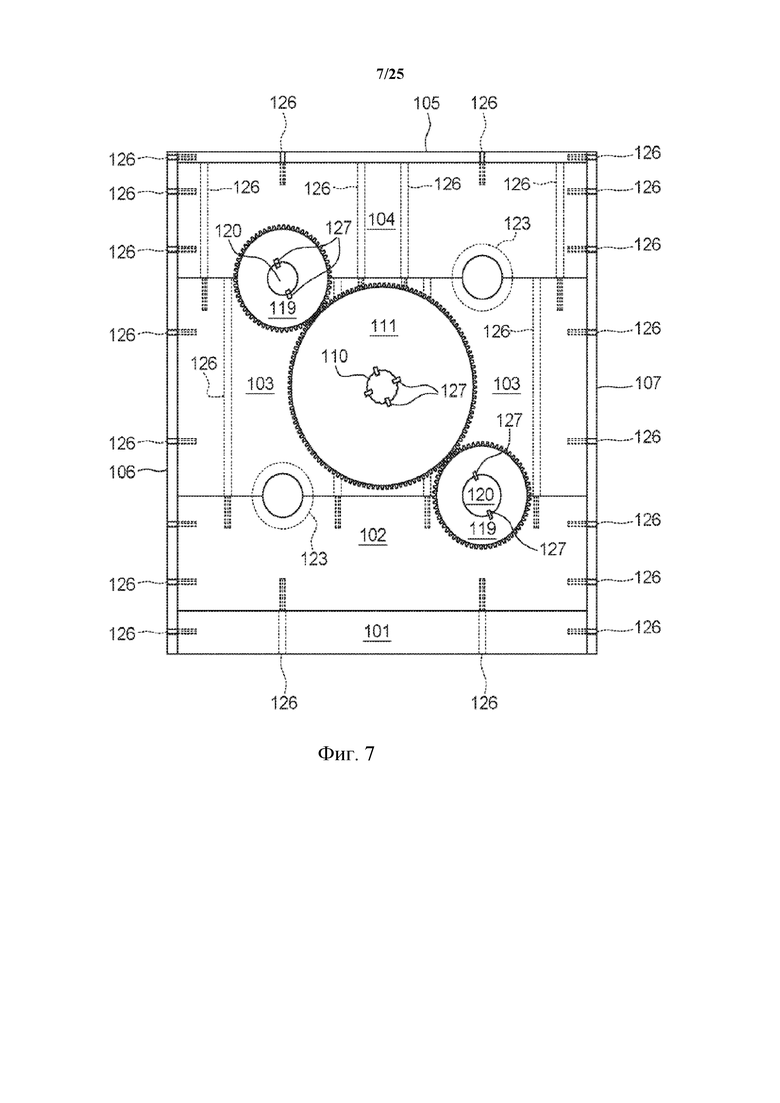
[0012] на фиг. 7 представлен вид с торца в поперечном разрезе магнитной двигательной системы привода, показанной на фиг. 2, с изображением передней стороны рамы в сборе с двумя планетарными шестернями для передачи крутящего момента и одной шестерней выходного вала;
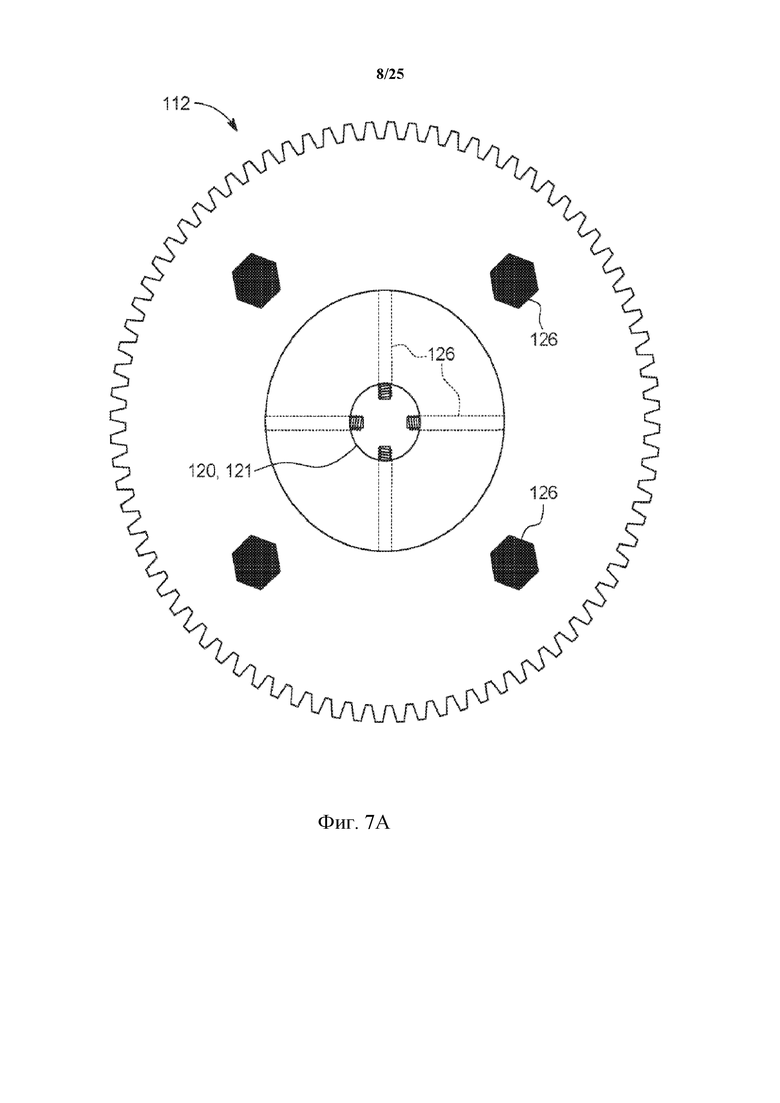
[0013] на фиг. 7А представлен увеличенный вид с торца синхронизирующей шестерни, показанной на фиг. 2;
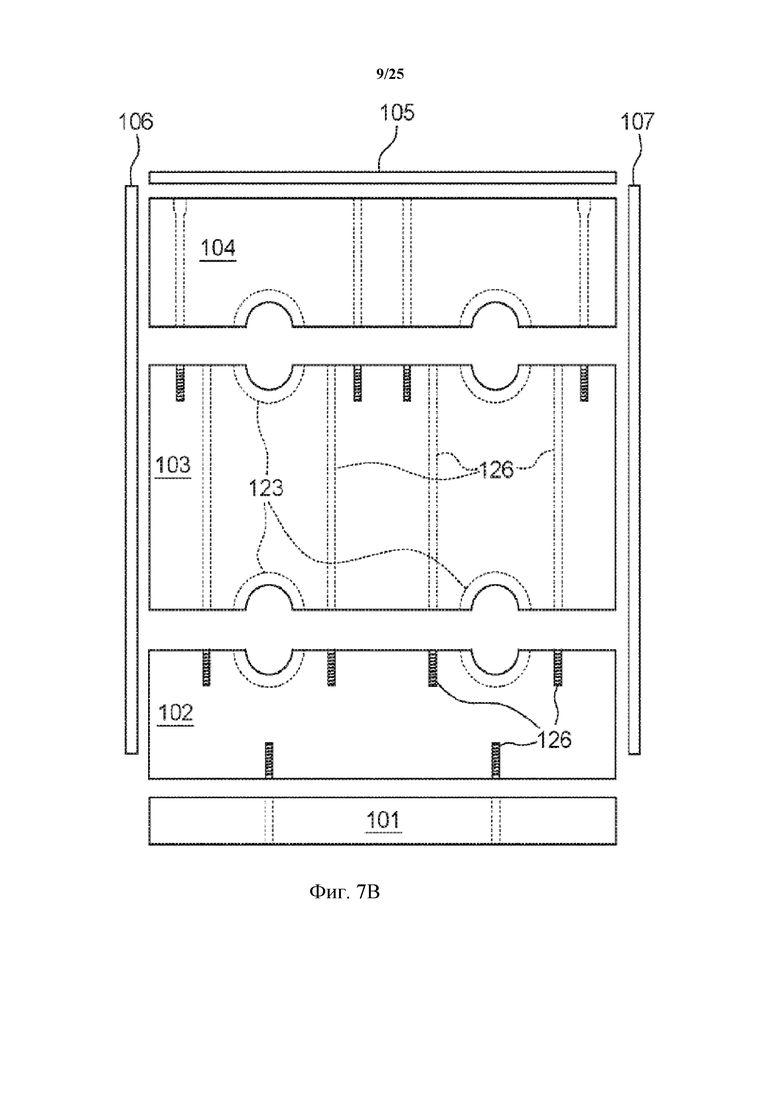
[0014] на фиг. 7В представлен частичный вид спереди корпуса рамы системы, показанной на фиг. 2;
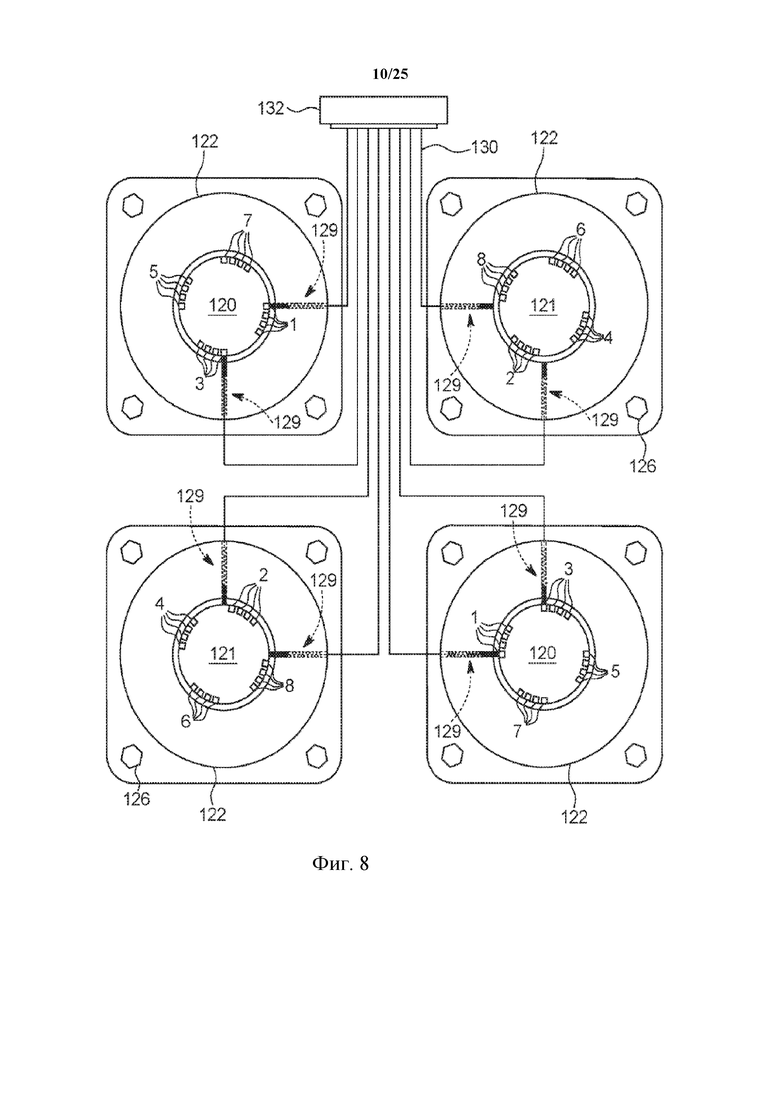
[0015] на фиг. 8 представлен схематический вид сзади электрических соединений, питающих модули привода, показанные на фиг. 2, с изображением порядка запуска чередующихся по диагонали роторов;
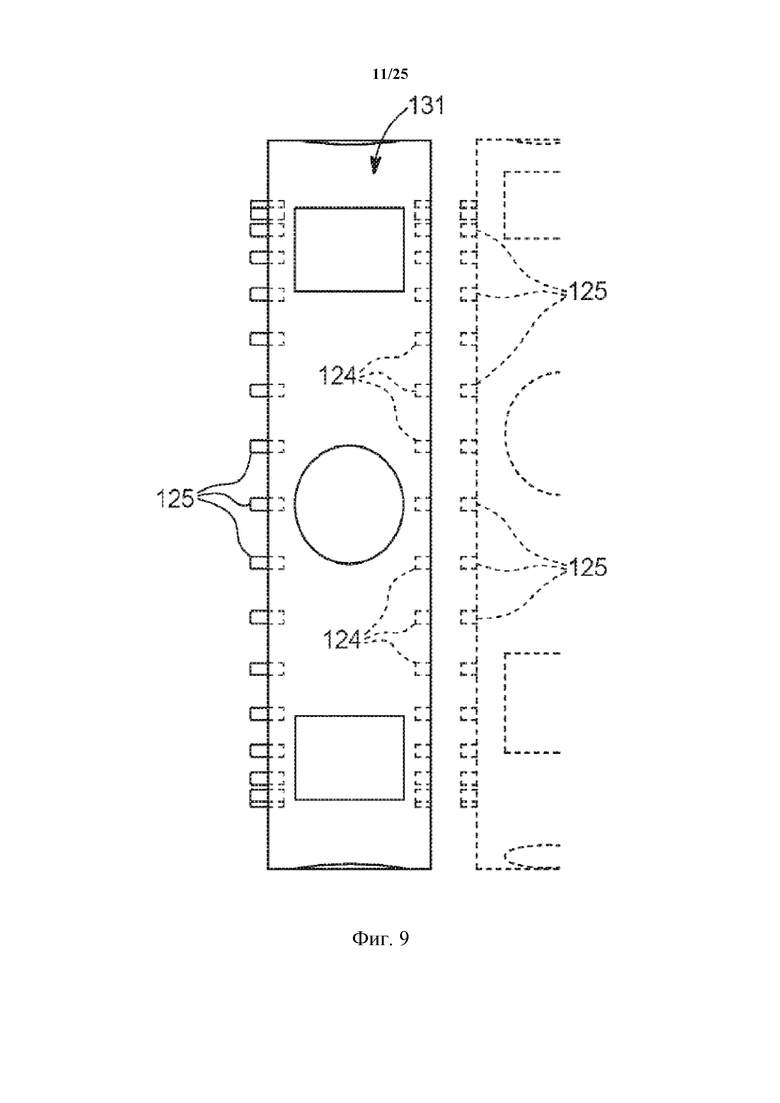
[0016] на фиг. 9 представлен увеличенный и частичный вид с разнесенными частями блока ротора согласно иллюстративному варианту осуществления настоящего изобретения с изображением RMA (радиальный магнитный блок) с N-полюсными катушками возбуждения и S-полюсными магнитами (RMA типа «А») или S-полюсными катушками возбуждения и N-полюсными магнитами (RMA типа «В»);
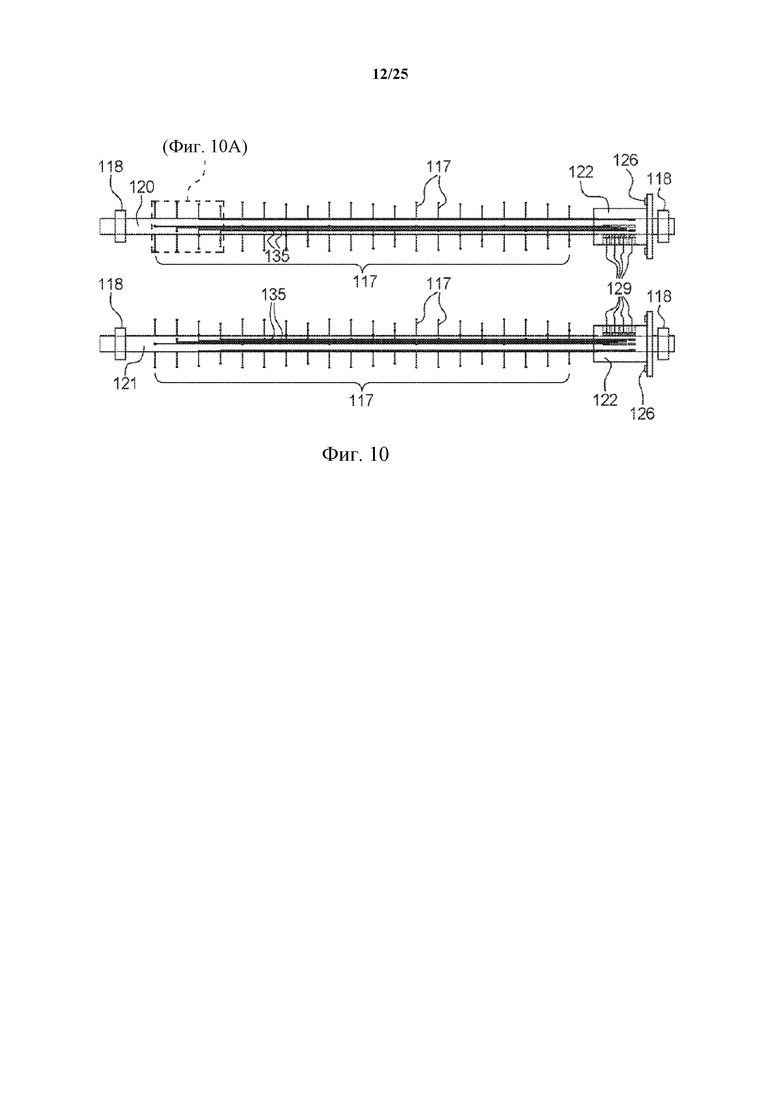
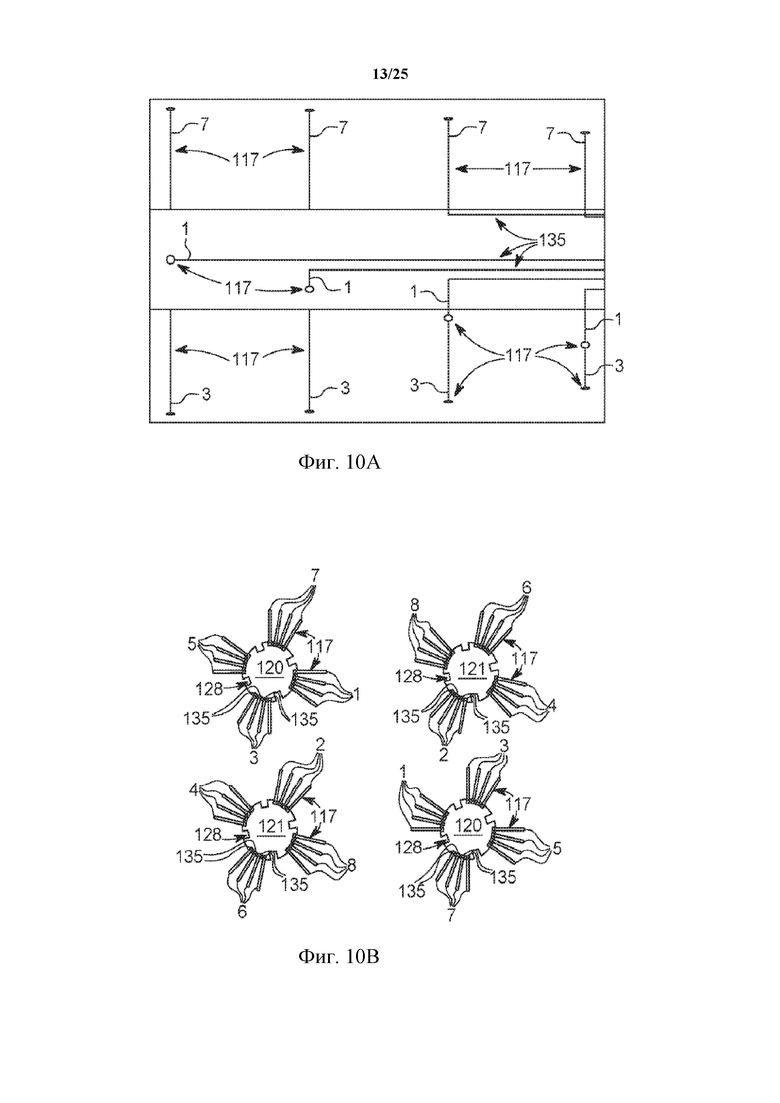
[0017] на фиг. 10 представлен схематический вид сбоку электрических соединений через валы согласно иллюстративному варианту осуществления настоящего изобретения;
[0018] на фиг. 10А представлен увеличенный вид прямоугольника 10А, показанного на фиг. 10;
[0019] на фиг. 10В представлен увеличенный вид с торца положений электрических штырей на радиальных магнитных блоках согласно иллюстративному варианту осуществления настоящего изобретения;
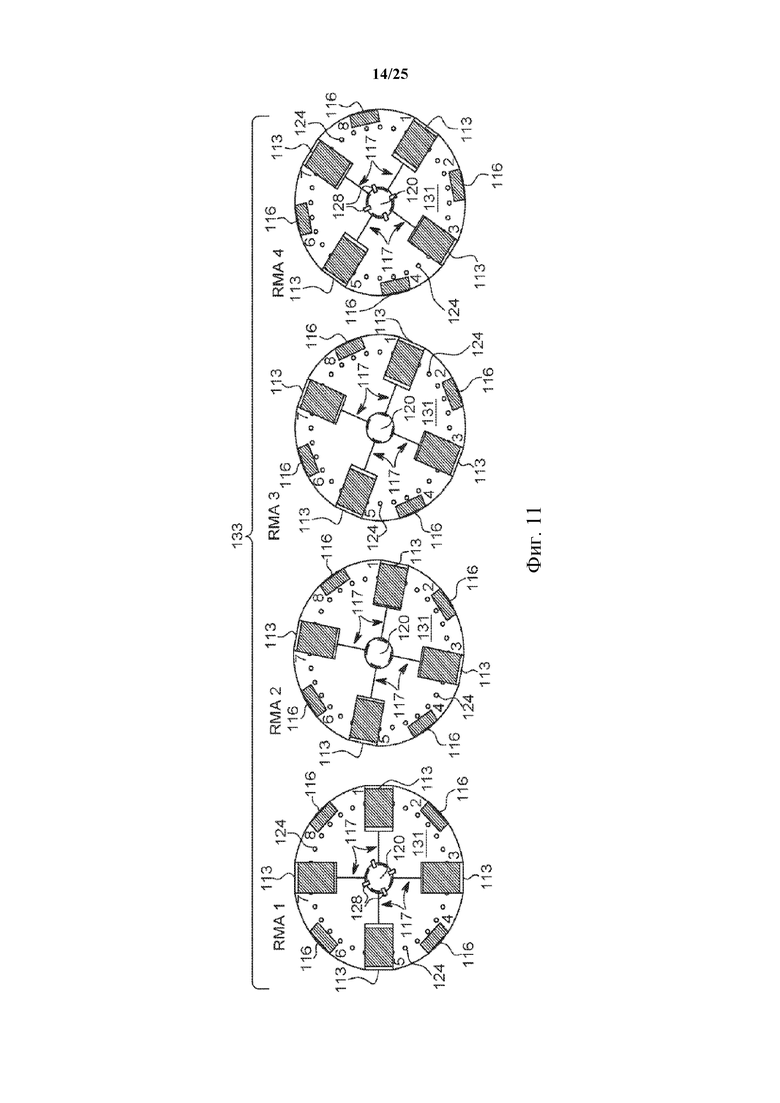
[0020] на фиг. 11 представлена схема видов с торца RMA верхнего блока ротора на фиг. 5, каждый из которых вращается по часовой стрелке со смещением на 11,25° от предыдущего RMA;
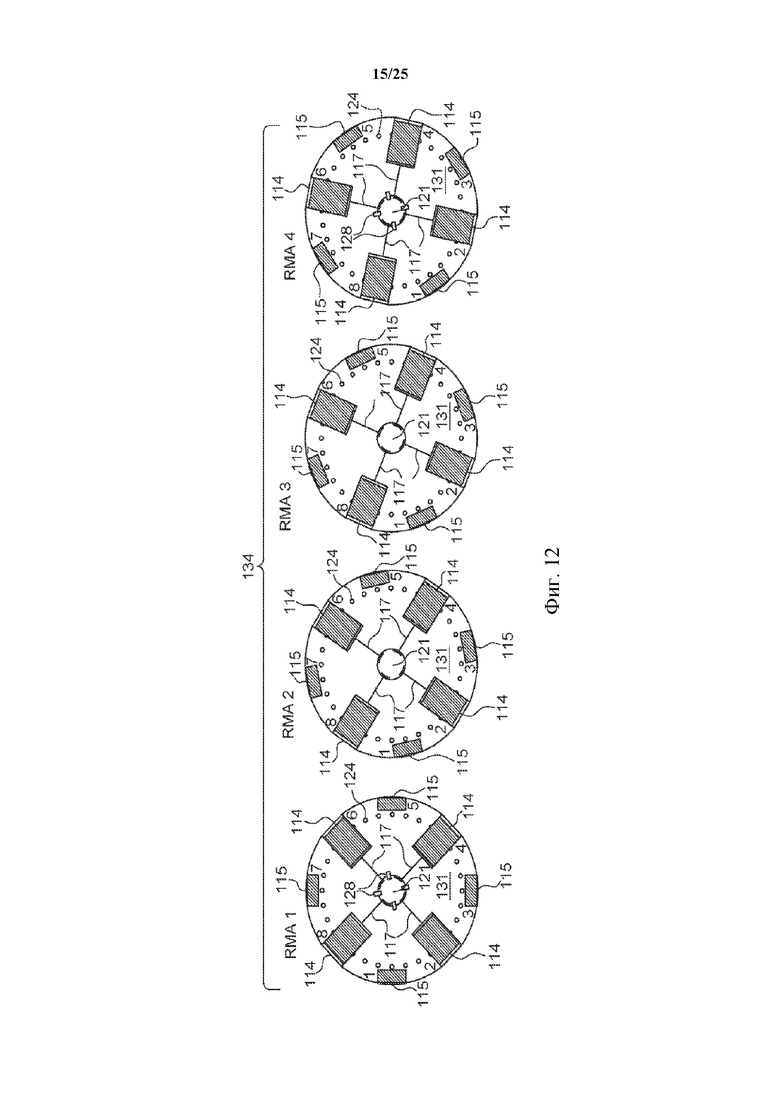
[0021] на фиг. 12 представлена схема видов с торца RMA верхнего блока ротора на фиг. 6, каждый из которых вращается против часовой стрелки со смещением на 11,25° от предыдущего RMA;
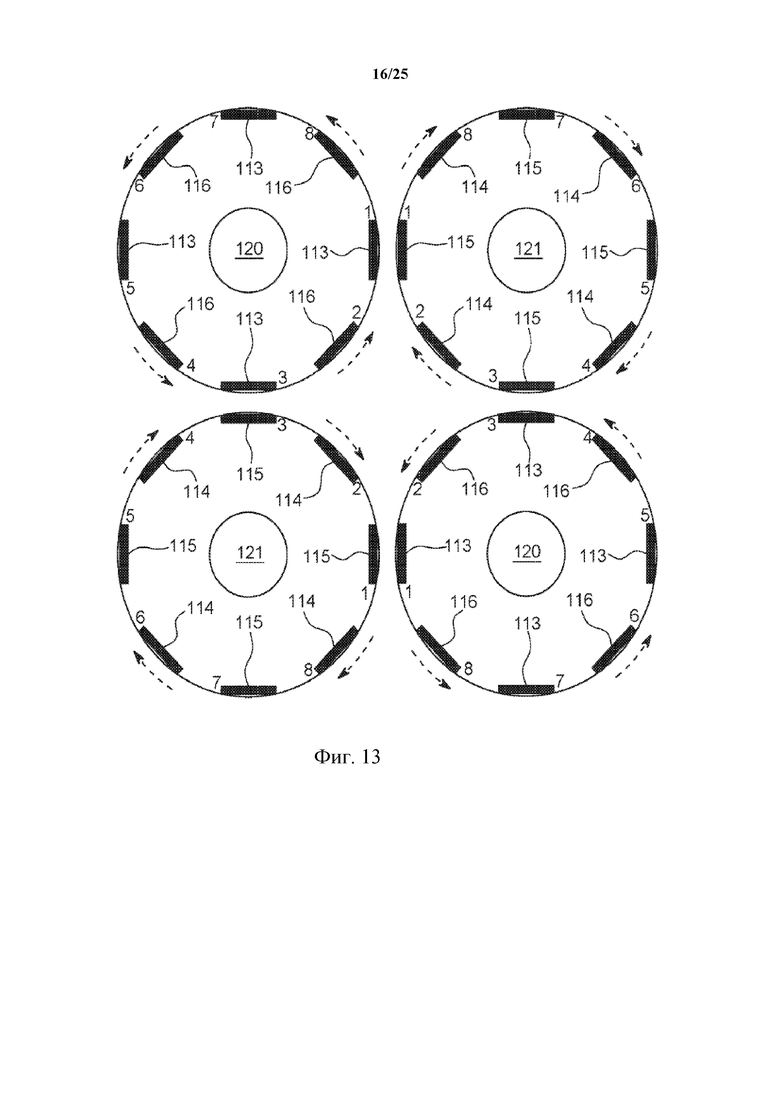
[0022] на фиг. 13 представлен схематический вид с торца модулей привода, показанных на фиг. 2, с изображением отталкивания между постоянными магнитами и электромагнитами смежных модулей привода согласно иллюстративному варианту осуществления настоящего изобретения;
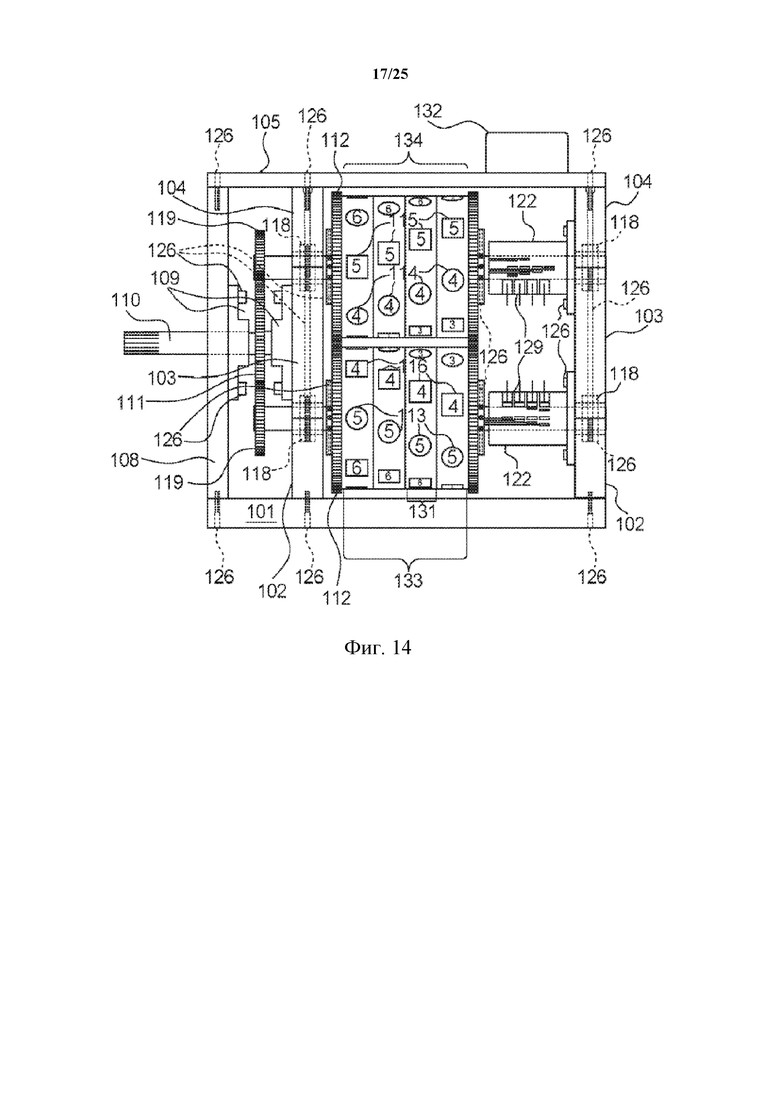
[0023] на фиг. 14 представлен вид справа магнитной двигательной системы привода согласно другому иллюстративному варианту осуществления настоящего изобретения;
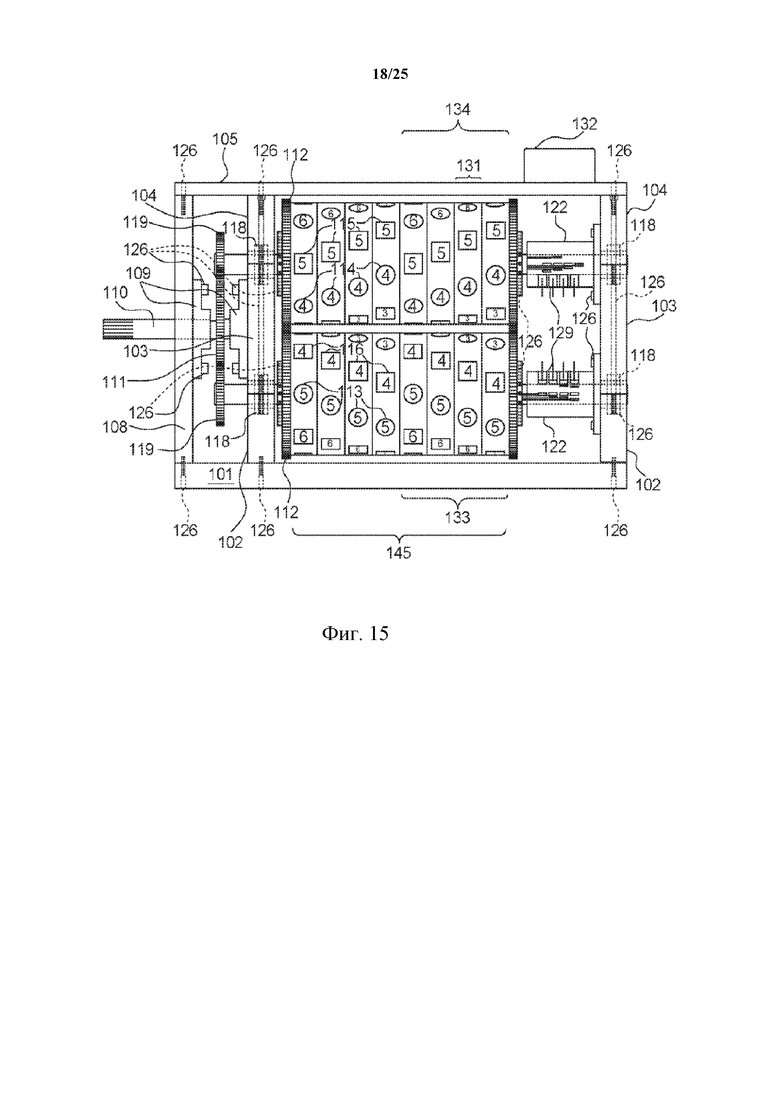
[0024] на фиг. 15 представлен вид справа магнитной двигательной системы привода согласно еще одному иллюстративному варианту осуществления настоящего изобретения; и
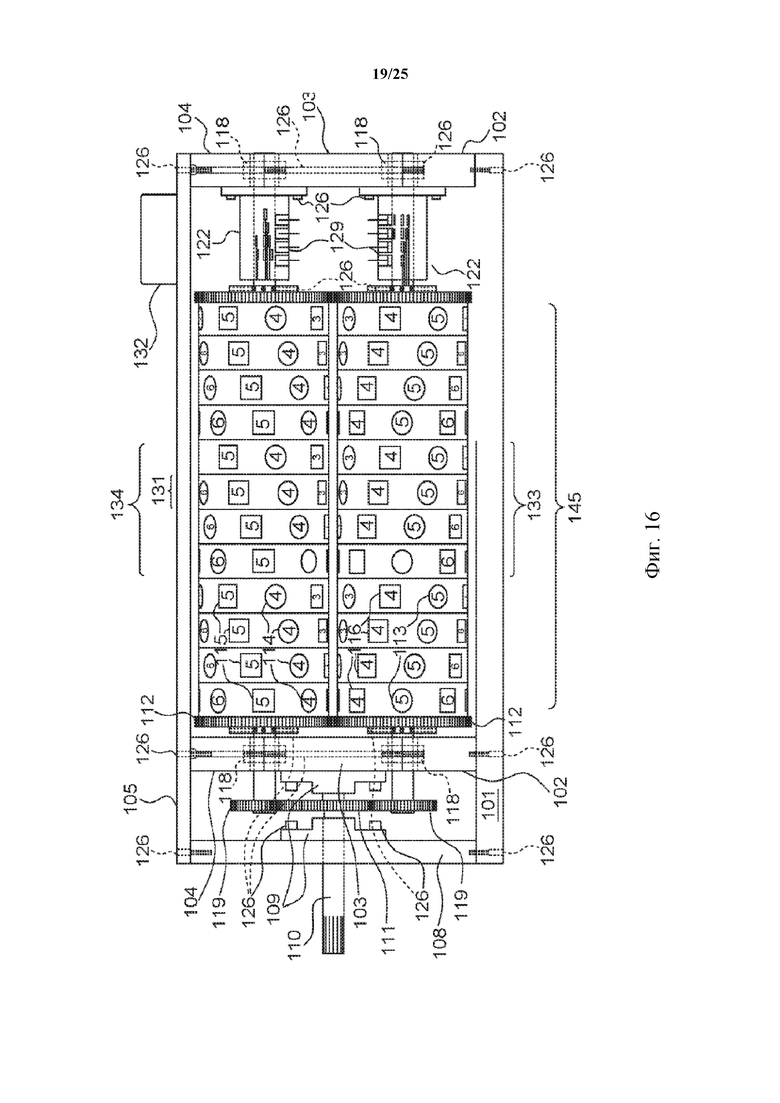
[0025] на фиг. 16 представлен вид справа магнитной двигательной системы привода согласно еще одному иллюстративному варианту осуществления настоящего изобретения.
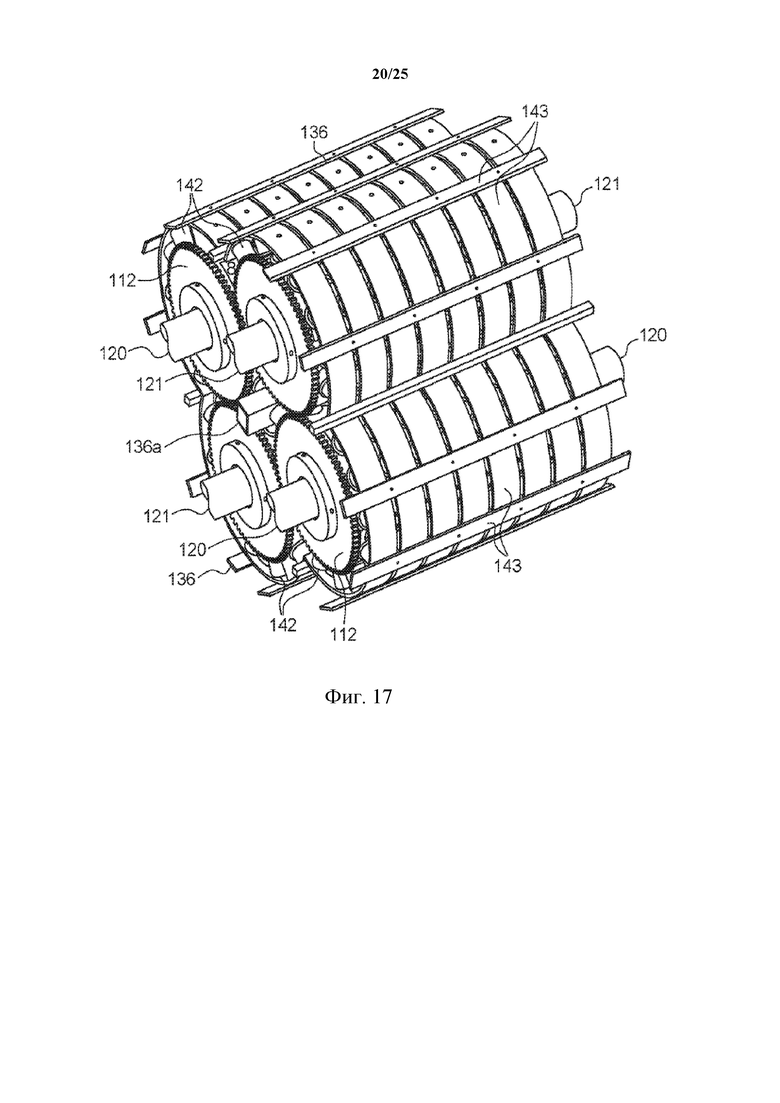
[0026] На фиг. 17 представлен перспективный вид магнитной двигательной системы привода, содержащей статор согласно иллюстративному варианту осуществления.
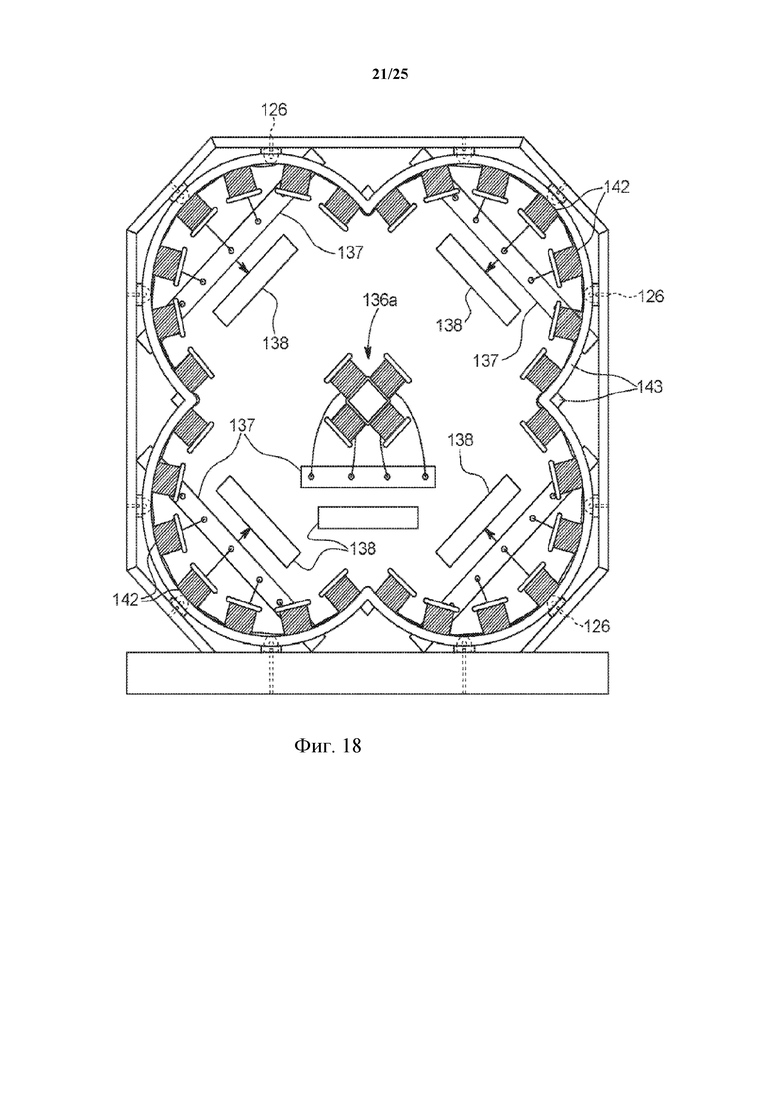
[0027] На фиг. 18 представлен вид с торца конструктивного элемента статора без магнитной двигательной системы привода, показанной на фиг. 17.
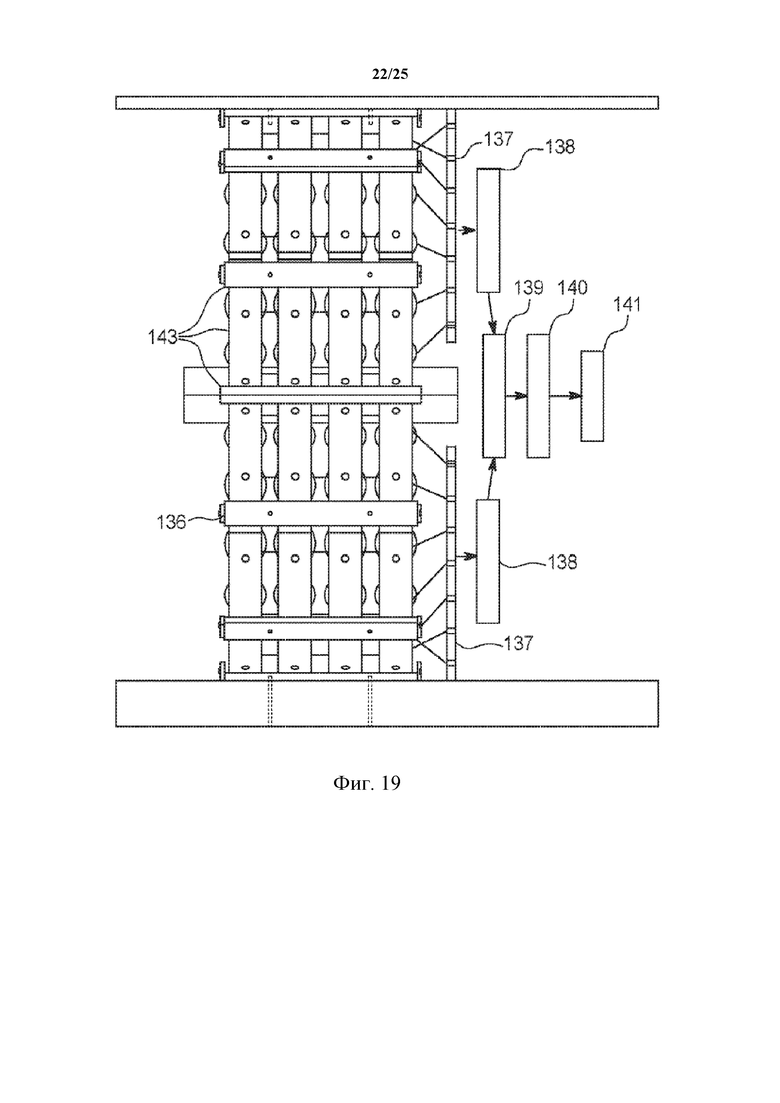
[0028] На фиг. 19 представлен вид сбоку магнитной двигательной системы привода, показанной на фиг. 17.
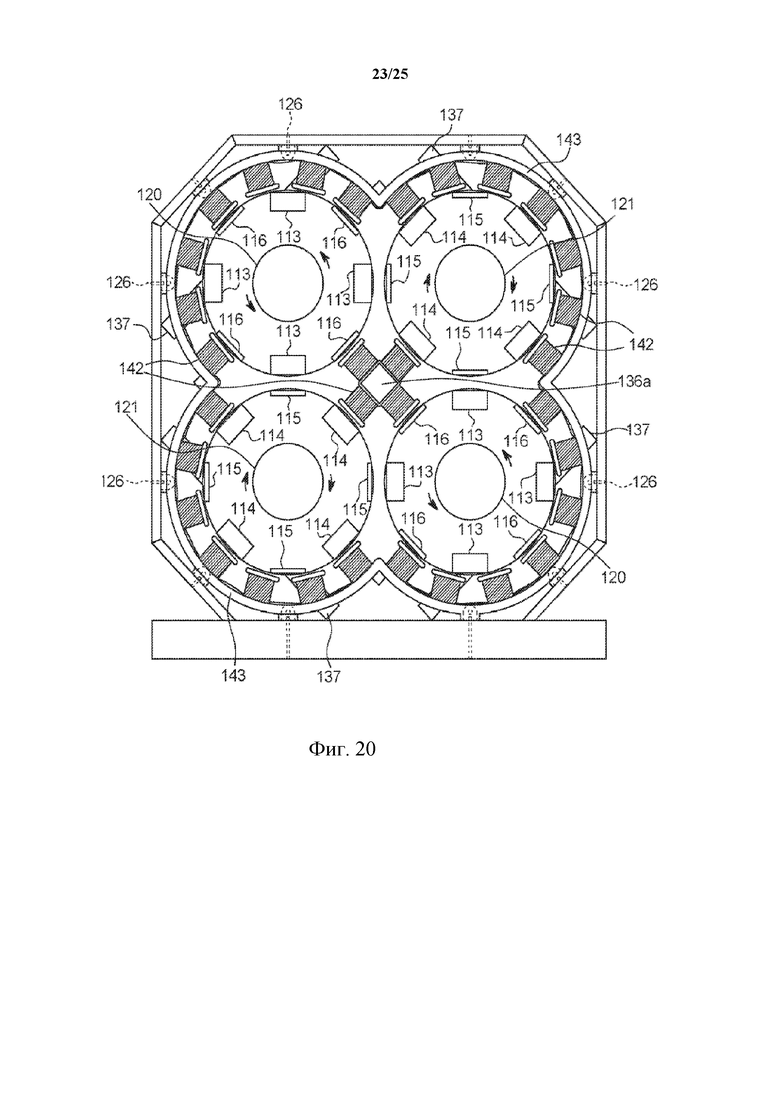
[0029] На фиг. 20 представлен вид с торца в поперечном разрезе магнитной двигательной системы привода, показанной на фиг. 17.
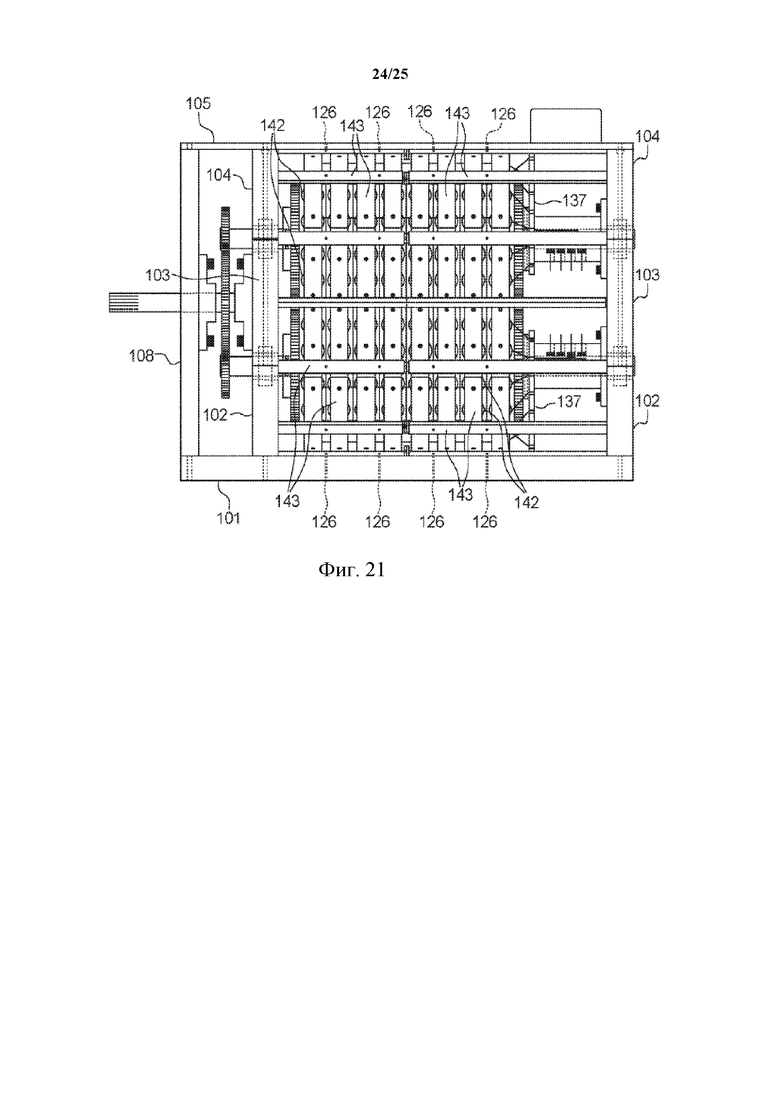
[0030] На фиг. 21 представлен вид сбоку магнитной двигательной системы привода, показанной на фиг. 17.
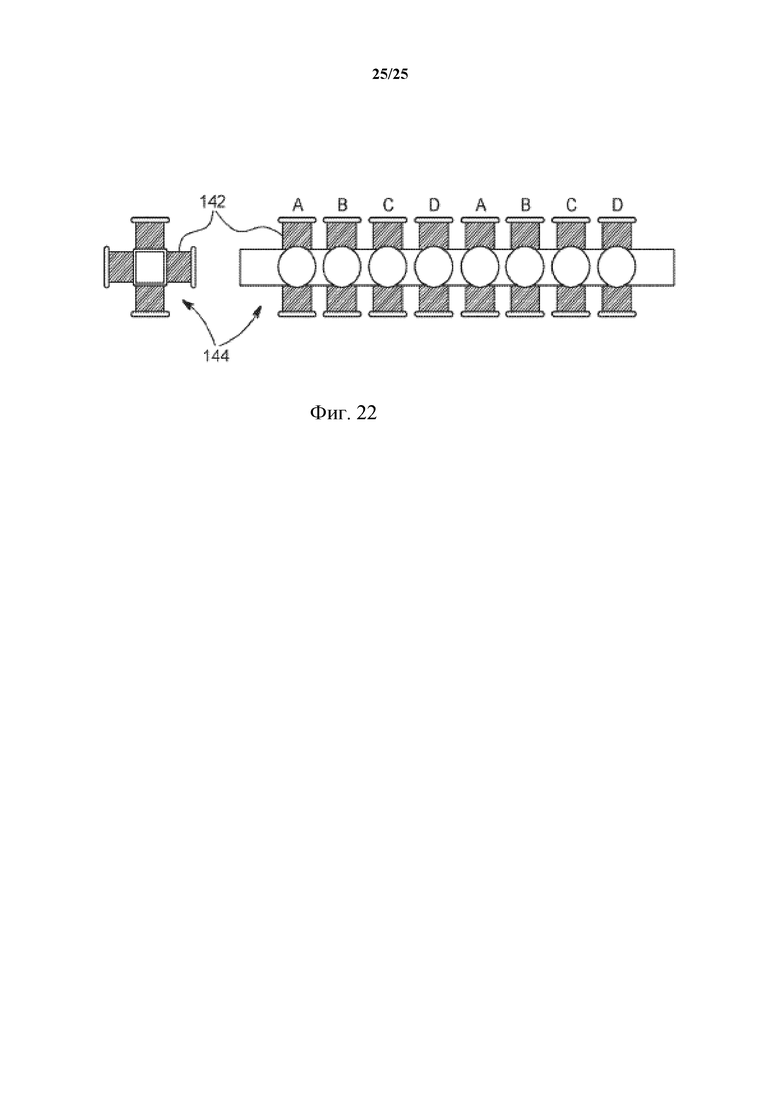
[0031] На фиг. 22 представлена комбинированная схема из видов с торца/видов сбоку сердечника статора магнитной двигательной системы привода из фиг. 20, при этом вид сбоку представляет собой частичный вид.
ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0032] В целом, в вариантах настоящего изобретения предлагается магнитная двигательная система привода. Магнитную двигательную систему привода можно расширять для удовлетворения различных потребностей в выходной мощности. Слово «иллюстративный» в данном документе означает «служащий примером или иллюстрацией». Любой аспект или конструкция, описанные в данном документе как «иллюстративные», не обязательно истолковываются как предпочтительные или имеющие преимущество перед другими аспектами или конструкциями.
[0033] Как показано на фиг. 1-4, согласно иллюстративному варианту осуществления настоящего изобретения показана магнитная двигательная система 100 привода (называемая в общем «система 100»). Система 100 в общем содержит множество модулей 145 привода, расположенных смежно для обеспечения объединенного выходного крутящего момента при работе. Каждый модуль 145 привода содержит множество магнитов (113; 114; 115; 116) (подробно описаны ниже). При работе магниты одной и той же полярности из различных модулей 145 привода синхронизируют таким образом, чтобы они были обращены друг к другу и отталкивались, что придает движущую силу соответствующим модулям 145, что заставляет валы 120; 121 поворачиваться. Модули 145 привода могут быть в общем цилиндрическими и размещенными таким образом, чтобы по меньшей мере у двух модулей их продольные оси были параллельны друг другу. В показанном иллюстративном варианте осуществления четыре модуля привода расположены параллельно, однако, понятно, что в системе 100 в общем используют два или более модулей привода, расположенных с возможностью вращения под действием друг друга. Работа системы 100 приводит во вращение модули 145 привода таким образом, чтобы валы 120; 121 обеспечивали выходной крутящий момент, что в свою очередь обеспечивает подачу выходной мощности на выходной приводной вал 110 (фиг. 2-4).
[0034] Модули 145 привода могут содержать один или более блоков 133, 134 ротора. В иллюстративном варианте осуществления показаны модули 145 привода, каждый из которых содержит пять блоков 133, 134 ротора, однако, следует иметь в виду, что аспекты настоящего изобретения позволяют предусмотреть больше или меньше блоков 133, 134 ротора в зависимости от требуемой выходной мощности (как показано на фиг. 14-16). Блоки 133, 134 ротора обычно содержат множество радиальных магнитных блоков (RMA) 131. В иллюстративном варианте осуществления RMA 131 может содержать 8 магнитов (113; 114; 115; 116), обращенных наружу из наружной поверхности и чередующихся между N-полюсными и S-полюсными полярностями. Магниты (113; 114; 115; 116) содержат постоянные магниты и электромагнитов с катушками возбуждения.
[0035] RMA 131 может быть выполнен из алюминиевого круглого проката с фрезерованными круглыми отверстиями достаточного диаметра и глубины для соответствия диаметрам электромагнитов 113; 114 каждые 90 градусов вокруг наружного радиуса для вставки катушек возбуждения, и фрезерованными квадратными углублениями каждые 90 градусов для вставки постоянных магнитов (115; 116), которые могут быть, например, магнитами NdFeB (марка 35). В лицевой и задней части RMA 131 могут быть выполнены тридцать два (32) отверстия 124 на 1/8 дюйма и могут быть смещены на 11,25 градуса в сторону на внутреннем радиусе для размещения прижимных штифтов 125 на 1/8 дюйма (фиг. 9), которые запрессованы вместе для обеспечения смещения магнитов на 11,25 градуса между каждым RMA 131. Штыри 117 (фиг. 10, 10А, 10В) могут проводить ток от валов 120; 121 к электромагнитам 113; 114 в RMA 131.
[0036] Как показано на фиг. 1-4, окружности с нечетным номером представляют N-полюсные электромагниты (В-поля). Окружности с четным номером представляют S-полюсные электромагниты (В-поля). Квадраты с нечетным номером представляют N-полюсные постоянные магниты (Н-поля). Квадраты с четным номером представляют S-полюсные постоянные магниты (Н-поля). Магниты (113; 114; 115; 116) пронумерованы таким образом, чтобы магниты с одним и тем же номером были синхронизированы так, чтобы быть обращенными друг к другу по мере того, как синхронизирующие шестерни 112 поворачиваются на концах модулей 145. Верхний левый и нижний правый модули 145 привода (фиг. 1) содержат нечетные электромагниты 113; (В-поля). Верхний правый и нижний левый модули 145 привода (фиг. 1) содержат четные электромагниты 114; (В-поля). Электромагниты (113; 114) (В-поля) могут быть смещены относительно постоянных магнитов (115; 116) (Н-поля) на 45 градусов. Каждый электромагнит (113; 114) (В-поля) может находиться на равном расстоянии от любого смежного постоянного магнита (115; 116) (Н-поля).
[0037] Как показано на фиг. 1-4, а также на фиг. 5 и 6, в иллюстративном варианте осуществления блоки 133, 134 ротора могут содержать, например, четыре RMA 131 (обозначены как «R1», «R2», «R3», «R4»), расположенных бок о бок в продольном направлении вдоль вала 120 или 121. Магниты (113; 114; 115; 116) могут быть расположены таким образом, чтобы магниты одного и того же полюса (например, N-полюсные электромагниты, представленные магнитом с тем же самым номером) были смежными друг другу, и любые два смежных магнита смещены радиально от центра блоков 133, 134 ротора на величину угла 11,25 градуса. Магниты одного и того же типа (113; 114; 115; 116) на смежных блоках 133, 134 ротора могут быть смещены на 33,75 градуса (например, последний квадрат 4 первого блока 133 ротора на нижнем правом модуле 145 привода радиально находится впереди на 33,75 градуса от первого квадрата 4 второго блока 133 ротора на том же самом модуле 145 привода).
[0038] Как показано на фиг. 2 4, 7, 7А и 7В, далее описан иллюстративный вариант осуществления корпуса системы 100, соединяющей валы 120; 121 с планетарной шестерней 119. Опорная плита 101 обеспечивает опорную конструкцию для поддержки оснований 102 рамы спереди и сзади от торцевой плиты 108, которая просверливается и в которой нарезается резьба для размещения резьбовых крепежных деталей 126 для обеспечения целостности конструкции. Основания 102 рамы, центр 103 рамы и верхняя часть 104 рамы могут быть поддерживающими конструкциями с вырезными углублениями 123, отфрезерованными в форме полумесяца (фиг. 7В), для крепления подшипников 118 ротора. Корпус 105 верхней плиты может быть соединен с левой плитой 106, правой плитой 107, верхней частью 104 рамы и торцевой плитой 108. Торцевая плита 108 может представлять собой ограждающую панель корпуса шестерни с фланцевыми подшипниками 109 для поверхностного монтажа, которая просверлена и в которой нарезана резьба для размещения выходного приводного вала 110. Роликовые подшипники 109 могут быть фланцевыми подшипниками для поверхностного монтажа, служащими опорой для выходного приводного вала 110. Выходной приводной вал 110 может быть прикреплен к центру 103 рамы и выступает через отверстие в торцевой плите 108. Ведущая шестерня 111 принимает крутящий момент от двух вращающихся против часовой стрелки планетарных шестерен 119 (также см. фиг. 7), соединенных с валами 120, которые приводятся в движение посредством вращения модулей 150 привода, и преобразует это усилие во вращение выходного приводного вала 110 по часовой стрелке. Синхронизирующие шестерни 112 могут предусматривать передаточное отношение 1:1 для всех модулей 145 привода. Крепежные детали могут прикреплять шестерни 112 к передней и задней стороне модулей 145 привода наряду с установочными винтами для крепления шестерен к валам 120 или 121. Подшипники 118 ротора могут запрессовываться на валы 120; 121 после прикрепления модулей 145 привода. Могут быть предусмотрены пазы 127 (фиг. 7) для латунных шпонок для прикрепления шестерен 119 к валам 120 методом прессовой посадки. Пазы 128 крепят блок 133, 134 ротора к валам 120; 121.
[0039] Как показано на фиг. 2-4, 10, 10А и 10В, ниже описано иллюстративное электрическое соединение в системе 100. Система 100 может содержать источник 132 электропитания, который может быть источником питания переменного тока/постоянного тока, который может содержать, например, трансформатор, двухполупериодный мостовой выпрямитель, фильтрующие конденсаторы и нагрузочные резисторы или любой подходящий серийно выпускаемый источник регулируемого питания. Система 100 может быть системой щеточного типа, однако, могут также использоваться варианты осуществления, предусматривающие бесщеточное исполнение. Например, щетки 129 могут представлять собой подпружиненные блоки, расположенные в корпусе 122 для щеток с токонесущим проводником 135, параллельно прикрепленным со стороны выхода источника 132 электропитания. Электропроводка 130 может содержать проходящие параллельно токонесущие проводники 135 достаточных типоразмера и длины для передачи электроэнергии со стороны выхода источника 132 электропитания подпружиненным щеткам 129 в корпусах 122 для щеток. Встроенные токонесущие проводники 135 могут подавать параллельное электропитание на все катушки возбуждения в электромагнитах 113; 114 посредством валов 20 и 21. Ток со стороны выхода источника 132 электропитания протекает по параллельной электропроводке 130 к щеткам 129, расположенным в корпусах 122 для щеток, и передает эту электроэнергию от щеток 129 токонесущим проводникам 135 на штыри 117 для подачи питания на катушки возбуждения в электромагнитах 113; 114 в парах по два (2) под прямыми углами 90 градусов, которые отталкиваются от постоянных магнитов 115; 116 на смежном модуле 150 привода.
[0040] Следует иметь в виду, что тогда как вышесказанное было описано главным образом в контексте двух смежных модулей 145 привода, система 100 может быть расположена, как показано, таким образом, чтобы электромагниты (113; 114) модуля 145 привода могли быть синхронизированы с соответствующими одинаково пронумерованными постоянными магнитами (115; 116) двух отдельных модулей 145 привода так, чтобы четыре модуля 145 привода могли обеспечивать параллельный синхронизированный выход. Как показано на фиг. 1 и 11-13, работа системы 100 показана на перспективном виде и на видах с торца для изображения четырех различных пар одинаково пронумерованных магнитов противоположной полярности, синхронизированных таким образом, чтобы быть обращенными друг к другу и в тоже самое время отталкиваться. При работе одинаково пронумерованные магниты одной и той же полярности, один из которых является электромагнитом 113 или 114 на первом «А» блоке 133 ротора первого радиального магнитного блока 131 первого модуля 145 привода, и второй из которых является постоянным магнитом 115 или 116 на первом блоке 134 ротора первого радиального магнитного блока 131 второго модуля 145 привода синхронизированы таким образом, что обращены друг к другу. Электромагниты (113; 114) могут быть неактивными до тех пор, пока не будут расположены напротив постоянного магнита (115; 116) той же полярности. Например, магниты 114 могут не иметь электрический заряд, пока не будут приведены путем вращения в положение, обращенное к магнитам 116. Показано иллюстративное начальное положение с выравниванием двух пар электромагнита 113 и постоянного магнита 115 в вертикальной плоскости (ЕМ1 и Ml) и двух пар электромагнита 113 и постоянного магнита 115 (ЕМ3 и М3) в горизонтальной плоскости (фиг. 13). Когда магнит 113 из одного модуля 145 привода обращен к магниту 115 из смежного модуля 145 привода, магнит 113 может быть под напряжением, что обеспечивает плотность потока (в ваттах) для магнита 115 (того же самого поля) для отталкивания друг от друга и создания радиальной движущей силы в соответствующих модулях 145 привода. Соответствующие одинаково пронумерованные магниты из второго блока ротора соответствующих модулей 145 привода отстают от первых спаренных магнитов на 11,25 градуса вращения и когда синхронизируется таким образом, чтобы быть обращены друг к другу, дополняют полученную двигательную выходную мощность соответствующих радиальных магнитных блоков 131. Таким образом, когда второй комплект одинаково пронумерованных магнитов из противоположно расположенных блоков 133 или 134 ротора (например, магниты на «R2», показанных на фиг. 5 и 6) синхронизируется для отталкивания, первые спаренные магниты уже не находятся в выровненном положении, позволяющем отталкиваться. Радиальные магнитные блоки 131 продолжают активизировать электромагниты 113; 114 в последовательности с соответствующими постоянными магнитами 115; 116 для обеспечения непрерывной радиальной движущей силы, приводящей в движение соответствующие валы 120 и 121, которые в свою очередь передают крутящий момент планетарной шестерне 119.
[0041] Величина выхода согласно настоящему изобретению зависит от размера диаметра N RMA 131, делительной окружности N шестерни, количества блоков 133, 134 ротора, которое определяет длину вала (120; 121) (см., например, фиг. 14 16), и мощность в ваттах катушек возбуждения полюсов N и S. Количество радиальных блоков 133, 134 ротора на вал определяет выходную мощность/крутящий момент. Например, система, в которой используются четыре блока 133, 134 ротора, может обеспечивать выход приблизительно 746 Вт/1 л.с. Следует иметь в виду, что настоящее изобретение обеспечивает уникальную симметрию в том отношении, что можно запроектировать множество копий модулей 145 привода, уложенных друг на друга в виде бесконечно высокой колонны и бесконечно длинного ряда, при этом все шестерни будут находиться в зацеплении, увеличивая выходную мощность и выходной крутящий момент. Для описания отношений между смежными модулями 145 привода может быть использована двойная двусторонняя, восьмигранная, винтовая, зеркальная симметрия.
[0042] На фиг. 17-22 показана магнитная двигательная система привода согласно другому иллюстративному варианту осуществления. Система, показанная на фиг. 17-21, схожа с магнитной двигательной системой 100 привода, за исключением того, что она дополнительно содержит статор 136. Статор 136 в некоторых вариантах осуществления может содержать клетку, которая окружает каждый из модулей 120; 121. Клетка может содержать полосы конструктивных элементов 143, выровненных радиально с блоками 145 ротора в сборе (фиг. 2) таким образом, чтобы магниты 113; 114; 115; и 116 вращались внизу полос. Конструктивные элементы 143 могут содержать, например, авиационный алюминий или углеродное волокно. Проводящие элементы могут соединять каждую полосу в сетке с образованием клетки 136 статора снаружи модулей 120; 121. В некоторых вариантах осуществления полюсные наконечники 142 могут быть алюминиевыми катушками, закрепленными с помощью полюсных колпачков (обозначены «А», «В», «С» и «D»), соединенными с элементами 143 клетки статора и изолированными от клетки 136 статора микалентой. Медные или латунные обмотки вокруг полюсных наконечников 142 могут быть соединены последовательно-параллельно в горизонтальной плоскости или последовательно-параллельно в вертикальной плоскости со смежными полюсными наконечниками 142. В некоторых вариантах осуществления центральный статор 136а также может быть размещен между модулями 120; 121. См. фиг. 17, 18, 20 и 22. Центральный статор 136а может содержать сердечник 144, который может представлять собой удлиненную трубу квадратного сечения из авиационного алюминия или углеродного волокна.
[0043] Статор 136 может выполнять функцию якоря, взаимодействующего с магнитами 113; 114; 115 и 116, по мере того, как модули 120; 121 приводятся во вращение. Электромагнитное поле создается магнитами 113; 114; 115; 116, вращающимися в непосредственной близости от клетки, вырабатывая выходной переменный ток. Обычно постоянные магниты 115; 116 могут всегда взаимодействовать со статором (статорами) 136 во время вращения модулей 120; 121 с созданием магнитного потока поля. В некоторых вариантах осуществления электромагниты 113; 114 будут, как правило, взаимодействовать со статором (статорами) 136, когда электромагниты 113; 114 находятся под напряжением. Клеммная колодка (электрический проводящий вывод) 137 может быть прикреплена к статору 136, который принимает выходной переменный ток, который может передаваться выпрямителю 138 для преобразования в постоянный ток. Регулятор 139 может быть соединен с выпрямителем 138 для поддержания постоянного уровня напряжения. Следует иметь в виду, что сочетание модулей 120; 121 со статором 136 обеспечивает как двигательный приводной выход от модулей 120; 121, приводящий в движение выходной приводной вал 110, так и источник электроэнергии из выходного переменного тока, выработанного магнитами 113; 114; 115 и 116, взаимодействующими с расположенным (-и) рядом статором (статорами) 136.
[0044] Средним специалистам в данной области техники должно быть понятно, что для использования функциональных преимуществ систем согласно настоящему изобретению возможно множество конфигураций конструктивного исполнения. Таким образом ввиду большого разнообразия конфигураций и конструктивных исполнений вариантов осуществления настоящего изобретения объем настоящего изобретения скорее характеризуется объемом нижеприведенной формулы изобретения, чем ограничивается вариантами осуществления, описанными выше.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0045] Варианты осуществления раскрытого изобретения могут быть использованы для преобразования магнитной энергии в электроэнергию.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2118036C1 |
| Электродвигатель | 1984 |
|
SU1321382A3 |
| СИСТЕМА ПРИВОДА ДЛЯ УСТРОЙСТВА ИНДИВИДУАЛЬНОГО УХОДА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2705619C2 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ТОРЦЕВЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2744482C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ СКОРОСТЬЮ ДВОЙНОГО ТИПА ДЛЯ ТУРБИНЫ | 2013 |
|
RU2627332C1 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2010 |
|
RU2545171C2 |
| ДВУХФАЗНАЯ, ЭЛЕКТРОННО-КОММУТИРУЕМАЯ РЕАКТИВНАЯ МАШИНА | 1997 |
|
RU2180766C2 |
| МАГНИТНЫЙ МОДУЛЬ КРЕПЛЕНИЯ С СИСТЕМОЙ ДЛЯ ПОДКЛЮЧЕНИЯ/ОТКЛЮЧЕНИЯ И РЕГУЛИРОВАНИЯ МАГНИТНОЙ СИЛЫ КРЕПЛЕНИЯ И УСТРОЙСТВО, ПОЛУЧАЕМОЕ С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО МОДУЛЯ | 2002 |
|
RU2289174C2 |
| СИСТЕМА ОБМЕНА ДАВЛЕНИЯ С ДВИГАТЕЛЬНОЙ СИСТЕМОЙ | 2015 |
|
RU2654803C2 |
Изобретение относится к области электротехники. Технический результат – повышение эффективности. Магнитная двигательная система привода содержит первый радиальный магнитный блок (RMA). Первый постоянный магнит первой полярности размещен на наружной поверхности первого RMA рядом с первым электромагнитом второй полярности. Второй RMA на наружной поверхности содержит второй электромагнит первой полярности. Второй постоянный магнит второй полярности расположен рядом со вторым электромагнитом на втором RMA. Первый электромагнит расположен так, чтобы выравниваться со вторым постоянным магнитом во время вращения первого RMA и вращения второго RMA. Второй электромагнит активируется при выравнивании с первым постоянным магнитом, первый электромагнит активируется при выравнивании со вторым постоянным магнитом, первый электромагнит и второй постоянный магнит отталкиваются друг от друга во время активации первого электромагнита, второй электромагнит и первый постоянный магнит отталкиваются друг от друга во время активации второго электромагнита и заставляют первый и второй RMA вращаться. 2 н. и 12 з.п. ф-лы, 22 ил.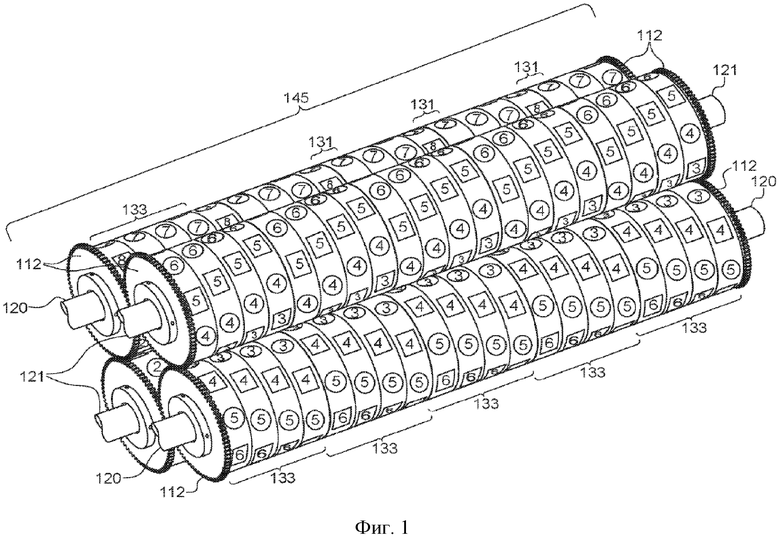
1. Магнитная двигательная система привода, содержащая:
первый радиальный магнитный блок (RMA);
первый вал, соединенный с первым RMA;
первый постоянный магнит первой полярности на наружной поверхности первого RMA;
первый электромагнит второй полярности, расположенный рядом с первым постоянным магнитом на первом RMA;
второй RMA;
второй вал, соединенный со вторым RMA;
второй электромагнит первой полярности на наружной поверхности второго RMA, причем первый постоянный магнит расположен так, чтобы выравниваться со вторым электромагнитом во время вращения первого RMA и вращения второго RMA,
второй постоянный магнит второй полярности, расположенный рядом со вторым электромагнитом на втором RMA, причем первый электромагнит расположен так, чтобы выравниваться со вторым постоянным магнитом во время вращения первого RMA и вращения второго RMA,
при этом второй электромагнит активируется при выравнивании с первым постоянным магнитом, первый электромагнит активируется при выравнивании со вторым постоянным магнитом, первый электромагнит и второй постоянный магнит отталкиваются друг от друга во время активации первого электромагнита, второй электромагнит и первый постоянный магнит отталкиваются друг от друга во время активации второго электромагнита и заставляют первый вал и второй вал вращаться;
приводной вал, вращаемый в результате поворота первого вала и второго вала;
статорный элемент, расположенный рядом с первым постоянным магнитом и вторым постоянным магнитом; и
электрический проводящий вывод, соединенный со статорным элементом, выполненный с возможностью получать ток, сгенерированный за счет взаимодействия первого постоянного магнита и второго постоянного магнита со статорным элементом во время вращения первого RMA и вращения второго RMA.
2. Магнитная двигательная система привода по п. 1, отличающаяся тем, что активация второго электромагнита включает подачу тока на первый электромагнит для обеспечения плотности потока такого же поля, что и у первого постоянного магнита.
3. Магнитная двигательная система привода по п. 1, отличающаяся тем, что выравнивание первого электромагнита и второго постоянного магнита включает то, что второй постоянный магнит обращен к первому электромагниту.
4. Магнитная двигательная система привода по п. 1, отличающаяся тем, что:
первый RMA содержит по меньшей мере два смежно расположенных блока ротора, при этом каждый блок ротора содержит соответственно множество электромагнитов одной и той же полярности и множество постоянных магнитов одной и той же полярности, при этом электромагниты одного и того же типа и одной и той же полярности на первом из блоков ротора расположены смежно и смещены радиально относительно электромагнитов одного и того же типа и одной и той же полярности на втором из блоков ротора на величину угла 11,25 градуса от оси первого вала; и
второй RMA содержит по меньшей мере два смежно расположенных блока ротора, при этом каждый блок ротора содержит соответственно множество электромагнитов одной и той же полярности и множество постоянных магнитов одной и той же полярности, при этом электромагниты одного и того же типа и одной и той же полярности на первом из блоков ротора второго RMA расположены смежно и смещены радиально относительно электромагнитов одного и того же типа и одной и той же полярности на втором из блоков ротора второго RMA на величину угла 11,25 градуса от оси первого вала.
5. Магнитная двигательная система привода по п. 4, отличающаяся тем, что каждый электромагнит находится на равном расстоянии от любого смежного постоянного магнита.
6. Магнитная двигательная система привода по п. 1, отличающаяся тем, что статорный элемент представляет собой клетку, окружающую первый RMA и второй RMA.
7. Магнитная двигательная система привода по п. 1, отличающаяся тем, что статорный элемент расположен между первым RMA и вторым RMA.
8. Магнитный двигательный модуль привода, содержащий
первый, второй, третий и четвертый модули привода, расположенные в продольном направлении параллельно друг другу, при этом каждый модуль привода содержит по меньшей мере один блок ротора в сборе, содержащий множество электромагнитов первой полярности, расположенных и выполненных с возможностью отталкиваться от множества постоянных магнитов первой полярности на любом смежном из первого, второго, третьего или четвертого модулей привода,
по меньшей мере один блок ротора в сборе, дополнительно содержащий множество электромагнитов второй полярности, размещенных между электромагнитами первой полярности, множество электромагнитов второй полярности, расположенных и выполненных с возможностью отталкиваться от множества постоянных магнитов второй полярности на любом смежном из первого, второго, третьего или четвертого модулей привода,
причем отталкивание электромагнитов первой полярности от постоянных магнитов первой полярности и отталкивание электромагнитов второй полярности от постоянных магнитов второй полярности приводит к возникновению радиальной движущей силы и вращению первого, второго, третьего и четвертого модулей привода;
шестерню, соединенную с первым, вторым, третьим и четвертым модулями привода;
приводной вал, соединенный с шестерней выходного вала и вращаемый посредством поворота планетарных шестерен, соединенных с первым и третьим или вторым и четвертым модулями привода;
статорный элемент, расположенный рядом со множеством постоянных магнитов первой полярности и множеством постоянных магнитов второй полярности; и
электрический проводящий вывод, соединенный со статорным элементом, выполненный с возможностью получать ток, сгенерированный за счет взаимодействия множества постоянных магнитов первой полярности и множества постоянных магнитов второй полярности со статорным элементом во время вращения первого, второго, третьего и четвертого модулей привода.
9. Магнитный двигательный модуль привода по п. 8, отличающийся тем, что множество постоянных магнитов первой полярности и множество электромагнитов первой полярности имеют северную полярность, и множество постоянных магнитов второй полярности и множество электромагнитов второй полярности имеют южную полярность.
10. Магнитный двигательный модуль привода по п. 8, отличающийся тем, что дополнительно содержит синхронизирующую шестерню для выравнивания по меньшей мере одного постоянного магнита северной полярности одного из модулей привода по меньшей мере с одним электромагнитом северной полярности смежного модуля привода.
11. Магнитный двигательный модуль привода по п. 8, отличающийся тем, что:
по меньшей мере один блок ротора в сборе включает два непосредственно смежных и расположенных в продольном направлении блока ротора в сборе, и
электромагниты одной и той же полярности смещены радиально друг от друга на одном и том же блоке ротора в сборе и смещены радиально друг от друга между двумя непосредственно смежными и расположенными в продольном направлении блоками ротора в сборе.
12. Магнитный двигательный модуль привода по п. 8, отличающийся тем, что статорный элемент представляет собой клетку, окружающую первый, второй, третий и четвертый модули привода.
13. Магнитный двигательный модуль привода по п. 12, отличающийся тем, что клетка содержит полосы металлических лент, размещенных над блоками ротора первого, второго, третьего и четвертого модулей привода.
14. Магнитный двигательный модуль привода по п. 8, отличающийся тем, что статорный элемент расположен между первым RMA и вторым RMA.
| US 9455615 B1, 27.09.2016 | |||
| US 4691119 A, 01.09.1987 | |||
| US 5534737 A, 09.07.1996 | |||
| US 5684351 A, 04.11.1997 | |||
| JP 2008092752 A, 17.04.2008 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ЗОЛЬ-ГЕЛЬНОГО СТЕКЛА, АКТИВИРОВАННОГО КРАСИТЕЛЕМ | 2001 |
|
RU2209188C2 |
| RU 96108733 А, 27.07.1998. | |||

