Настоящая система относится к системе привода для индивидуального устройства ухода (PCA), такого как автоматическая зубная щетка, и, в частности, к резонансной высокочастотной системе привода, использующей активную амортизацию вибрации для снижения линейных и угловых колебаний в устройстве индивидуального ухода, например, автоматической зубной щетке или тому подобном, и способу его работы.
Резонансные высокочастотные электронные устройства индивидуального ухода, например, автоматические зубные щетки, обычно используются потребителями для индивидуального ухода. Эти устройства обычно работают на высоких частотах, часто превышающих 100 Гц, и используются для работы различных очищающих устройств, например, чистящей головки. Хотя высокочастотное чистящее действие чистящей головки желательно для удаления органических остатков и бляшки, высокочастотное чистящее действие может вызвать вибрацию, которая при использовании передается ручке зубной щетки. Эта вибрация является нежелательной, поскольку она может привести к дискомфорту пользователя.
Система(ы), устройство(а), способ(ы), конструкция(и), пользовательский(ие) интерфейс(ы), компьютерная(ые) программа(ы), процессы и т.д. (здесь и далее каждый из которых называется системой, если иное не указывается контекстом), описанные в настоящем документе, направлены на решение проблем предшествующего уровня техники.
Согласно вариантам осуществления настоящей системы раскрыто устройство электрической зубной щетки, которое может включать в себя корпус, образующий полость и проем; электродвигатель, расположенный в полости, который может включать в себя первый и второй смещающие элементы, кожух статора, расположенный между первым и вторым смещающими элементами и линейно смещаемый ими, при этом кожух статора может включать в себя проем и по меньшей мере один электромагнит для генерирования магнитного поля, и/или ротор, имеющий противоположные концы и проходящий через кожух статора, при этом ротор может включать в себя выводной вал; и/или рабочий элемент, который может включать в себя чистящую головку на одном его конце и может быть соединен с одним из противоположных концов выводного вала.
Также предусматривается, что каждый из первого и второго смещающих элементов может иметь противоположные первые и вторые концы, при этом каждый из первых концов может быть неподвижно прикреплен к корпусу, а каждый из вторых концов может располагаться вблизи кожуха статора. Предусматривается также, что первый и второй смещающие элементы могут дополнительно поворотно смещать кожух статора. Дополнительно предусматривается, что ротор может дополнительно включать в себя по меньшей мере один магнит, который взаимодействует с магнитным возратно-поступательного приведения в действие ротора и кожуха статора линейно и поворотно не в фазе друг с другом. Согласно другим вариантам осуществления настоящей системы устройство может дополнительно включать в себя контроллер, который подает по меньшей мере один управляющий сигнал на указанный по меньшей мере один электромагнит для возвратно-поступательного приведения в действие кожуха статора поворотно по существу с поворотной резонансной частотой кожуха статора и линейно по существу с линейной резонансной частотoй кожуха статора. Для ясности и без ограничения предполагается, что поворотная резонансная частота кожуха статора и линейная резонансная частота кожуха статора по существу соответствует соответствующим поворотной и линейной частотам для пружинно-массовой системы электродвигателя. Однако согласно некоторым вариантам осуществления резонансные частоты статора необязательно должны соответствовать резонансным частотам ротора. Например, в этих вариантах осуществления для достижения требуемой величины ослабления вибрации при использовании резонансная частота статора (например, линейная или поворотная) должна быть много ниже соответствующей резонансной частоты ротора. Близость резонансной частоты статора (например, линейной или поворотной) к соответствующей резонансной частоте ротора, может препятствовать ослаблению вибрации, поскольку это может ограничивать рассогласованное по фазе движение ротора/статора, от которого зависит ослабление вибрации. Дополнительно предусмотрено, что кожух статора поддерживается ротором. Более того, согласно некоторым вариантам осуществления первый и второй смещающие элементы могут дополнительно поворотно смещать кожух статора.
Согласно другим вариантам осуществления настоящей системы обеспечивается устройство индивидуального ухода, которое может включать в себя корпус, образующий полость и проем; электродвигатель, расположенный в полости корпуса, который может включать в себя: первый и второй смещающие элементы, ротор, проходящий через по меньшей мере один из первого и второго смещающих элементов, который может включать в себя выводной вал, имеющий противоположные первый и второй концы, и кожух статора, который поворотно и линейно выполняет возвратно-поступательные движения относительно корпуса для ослабления вибрации электродвигателя, при этом кожух статора имеет первый и второй концы и по меньшей мере один электромагнит, расположенный между первым и вторым концами и выполненный с возможностью вывода магнитного поля, которое взаимодействует с ротором для возвратно-поступательного приведения в действие выводного вала линейно и поворотно; и/или рабочий элемент, включающий в себя чистящую головку, соединенную с одним из противоположных концов выводного вала.
Также предусматривается, что каждый из первого и второго смещающих элементов может располагаться между корпусом и кожухом статора и может неподвижно прикрепляться к одному концу участка корпуса. Также предусматривается, что первый и второй смещающие элементы могут дополнительно поворотно смещать кожух статора. Дополнительно предусматривается, что ротор может дополнительно включать в себя по меньшей мере один магнит, который взаимодействует с магнитным полем по меньшей мере одного электромагнита для возвратно-поступательного приведения в действие ротора и виброгасителя линейно и поворотно не в фазе друг с другом.
Также предусматривается, что в некоторых вариантах осуществления выводной вал может проходить через кожух статора и поддерживать кожух статора. Также предусматривается, что устройство может включать в себя контроллер, который может генерировать по меньшей мере один управляющий сигнал для приведения в действие кожуха статора поворотно с поворотной резонансной частотой кожуха статора и линейно с линейной резонансной частотой кожуха статора. Также предусматривается, что кожух статора может иметь резонансную частоту, которая может быть по существу такой же, как резонансная частота ротора.
Согласно дополнительным вариантам осуществления настоящей системы обеспечивается устройство индивидуального ухода, имеющее активную амортизацию вибрации. Устройство индивидуального ухода может включать в себя: корпус, образующий полость и проем; первый и второй подшипники, неподвижно расположенные в полости на расстоянии друг от друга и неподвижно прикрепленные к участку корпуса; ротор может включать в себя выводной вал, который проходит через первый и второй подшипники и по меньшей мере один магнит; и/или кожух статора, имеющий по меньшей мере один электромагнит, выполненный с возможностью генерирования магнитного поля для взаимодействия с магнитным полем указанного по меньшей мере одного магнита для возвратно-поступательного приведения в действие ротора и кожуха статора линейно и поворотно относительно части корпуса не в фазе друг с другом для амортизации вибрации.
Устройство индивидуального ухода может дополнительно включать в себя первый и второй смещающие элементы, каждый из которых может располагаться между кожухом статора и одним из первого и второго подшипников. Также предусматривается, что первый и второй смещающие элементы могут быть выполнены с возможностью линейно и поворотно смещать статор относительно корпуса. Устройство индивидуального ухода может дополнительно включать в себя контроллер, который может генерировать по меньшей мере один управляющий сигнал для приведения в действие указанного по меньшей мере одного электромагнита с резонансной частотой кожуха статора. Устройство индивидуального ухода может дополнительно включать в себя рабочий элемент, имеющий чистящую головку, соединенную с одним из противоположных концов выводного вала.
Настоящее изобретение объяснено более подробно в нижеприведенных примерных вариантах осуществления и со ссылкой на чертежи, на которых идентичные или аналогичные элементы частично указаны одними и теми же номерами ссылочных позиций, и признаки различных примерных вариантов осуществления могут быть объединены. На чертежах:
Фиг. 1 - вид сбоку участка конструкции электромагнитного двигателя (EMA) согласно вариантам осуществления настоящей системы;
Фиг. 2 - EMA, установленная в устройстве индивидуального ухода согласно вариантам осуществления настоящей системы;
Фиг. 3 - подробный вид в поперечном разрезе участка EMA на фиг. 1 согласно вариантам осуществления настоящей системы;
Фиг. 4A - вид сбоку в разрезе участка системы зубной щетки, выполненный вдоль линий 4A-4A на фиг. 3, согласно вариантам осуществления настоящей системы;
Фиг. 4B - вид сбоку в разрезе участка системы зубной щетки, выполненный по линиям 4B-4B фиг. 3 согласно вариантам осуществления настоящей системы;
Фиг. 5 - участок системы согласно вариантам осуществления настоящей системы;
Фиг. 6 - подробный вид в разрезе участка EMA 600, использующей единственный электромагнит, согласно вариантам осуществления настоящей системы;
Фиг. 7 - вид в разрезе сбоку участка EMA, выполненном вдоль линии 7-7 на фиг. 6, согласно вариантам осуществления настоящей системы;
Фиг. 8 - подробный вид в разрезе участка EMA, использующей единственный электромагнит, согласно вариантам осуществления настоящей системы; и
Фиг. 9 - подробный вид спереди в перспективе с частичным вырезом участка EMA 900 согласно вариантам осуществления настоящей системы.
Нижеследующее представляет собой описания иллюстративных вариантов осуществления, которые в соединении с нижеследующими чертежами демонстрируют упомянутые выше признаки и преимущества, а также дополнительные признаки и преимущества. В нижеследующем описании с целью объяснения, а не ограничения, описаны иллюстративные подробности, например, конфигурация, сопряжения, технические средства, атрибуты элементов и т.д.. Однако специалистам в данной области техники очевидно, что другие варианты осуществления, отступающие от этих подробностей, будут также находятся в пределах объема приложенной формулы. Более того, для ясности подробные описания хорошо известных устройств, схем, инструментов, технических средств и способов опущены, чтобы не усложнять описание настоящей системы. Следует ясно понимать, что чертежи включены с целью иллюстрации и не представляют весь объем настоящей системы. На сопроводительных чертежах подобные номера ссылочных позиций на различных чертежах могут указывать аналогичные элементы.
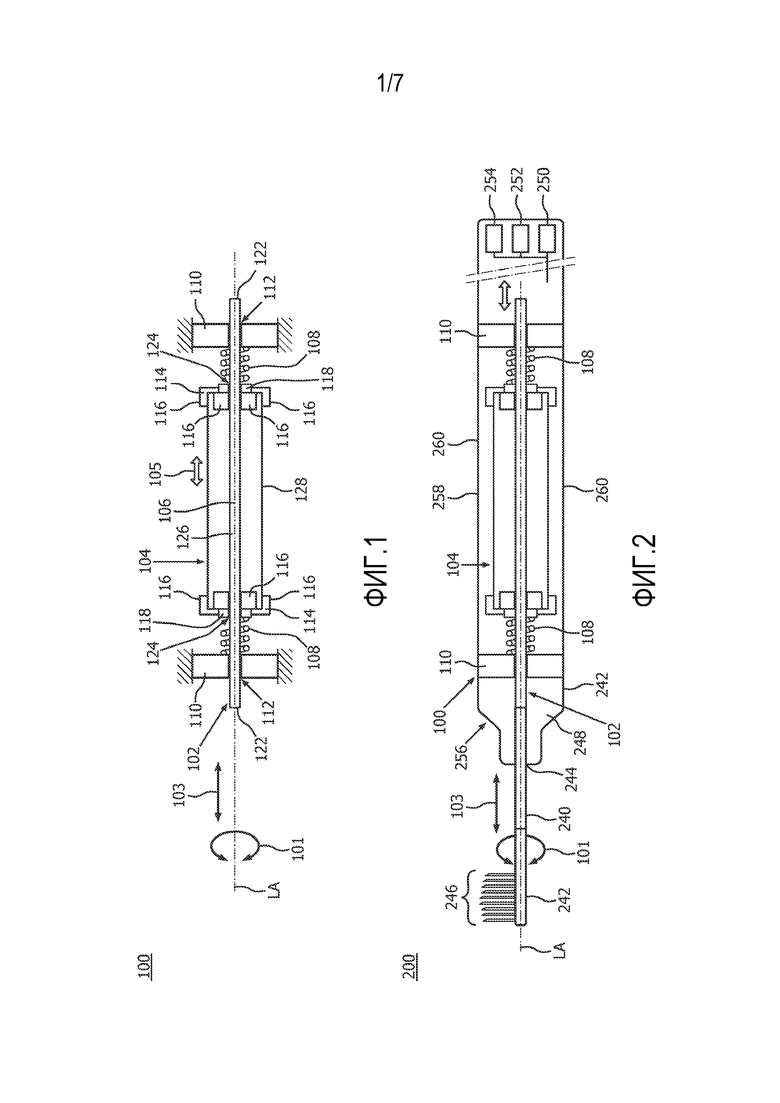
На фиг. 1 представлен вид сбоку участка конструкции электромагнитного двигателя (EMA) 100 согласно вариантам осуществления настоящей системы. EMA 100 может включать в себя одно или более из статора 104, ротора 106, смещающих элементов 108 и подшипников 110.
Ротор 106 может включать в себя по меньшей мере один магнит и вал 102 (например, выводной или приводной вал), имеющий противоположные концы 122, при этом вал 102 может проходить через проемы 112 в подшипниках 110, которые могут быть покрыты подходящим подшипниковым материалом для уменьшения трения между поверхностью соответствующего подшипника 110 и вала 102 и может обеспечивать возвратно-поступательного движения вала радиально и/или продольно относительно продольной оси LA вала 102, как проиллюстрировано соответственно стрелками 101 и 103. Соответственно, ротор 106 может совершать возвратно-поступательные движения радиально и/или продольно относительно подшипников 110. Однако в других вариантах осуществления предусмотрено, что подшипники 110 могут включать в себя подшипники скольжения (например, поверхность со сниженным трением, и т.д.), гидростатические подшипники, шарикоподшипники и/или тому подобное для уменьшения трения между подшипниками 110 и валом 102. Подшипники могут быть выполнены с возможностью поддержания нагрузки вала 102 при использовании, например, нагрузки из-за воздействий, созданных EMA 100 и пользователем (например, переданной посредством чистящей головки, соединенной с валом 102 ротора 108). Вал 102 может включать в себя односекционный или двухсекционный вал. Например, в некоторых вариантах осуществления ротор может включать в себя центральную секцию, включающую в себя по меньшей мере один магнит и по меньшей мере один вал, который проходит через центральную секцию.
Ротор 108 может включать в себя один или более магнитов, например, постоянных магнитов, которые могут взаимодействовать с магнитными (например, электро-магнитными) полями, генерированными по меньшей мере одним электромагнитом статора 104, работающим под управлением контроллера. Эти магнитные поля могут обеспечивать магнитную силу, которая может вызывать перемещение вала линейно и/или радиально относительно продольной оси LA вала 102, как представлено соответственно стрелками 105 и 103. Вал 102 может проходить через проемы 112 подшипников 110, смещающие элементы 108 и полость 126 статора 104. Кроме того, указанное по меньшей мере одно из подшипников 110, смещающих элементов 108 и статора 104 может располагаться между противоположными концами 122 вала 102.
Статор 104 может включать в себя центральный участок 128, который может включать в себя указанный по меньшей мере один электромагнит, управляемый контроллером и подходящий для генерирования магнитного поля или полей, подходящих для взаимодействия с указанным магнитным полем или полями указанного по меньшей мере одного магнита ротора для возвратно-поступательного приведения в действие ротора и кожуха статора линейно и поворотно не в фазе друг с другом. Статор 104 может включать в себя один или более грузиков для регулирования веса и/или момента инерции статора 104. Статор 104 может располагаться между подшипниками 110 и может быть смещен в положение радиально (поворотно) и/или линейно относительно продольной оси статора 104 (которая в настоящих вариантах осуществления для ясности может соответствовать LA) смещающими элементами 108 (которые расположены между статором 104 и близлежащим подшипником 110). Смещающие элементы 108 могут быть аналогичны друг другу (например, могут иметь одну и ту же или по существу одну и ту же жесткость пружины k) так, чтобы статор 104 мог быть одинаково смещен между подшипниками 110. Однако в других вариантах осуществления жесткость пружины k смещающих элементов 108 может различаться.
Согласно некоторым вариантам осуществления статор 104 и/или ротор 108 может включать в себя грузики, которые могут использоваться для регулировки инерции и/или массы статора 104 и/или ротора 108 для настройки отношения инерционных характеристик в осевом и/или поворотном направлении, так чтобы оно соответствовало отношению жесткости пружины в осевом (например, линейном) и/или поворотном направлении. При необходимости грузики могут образовывать единое целое со статором 104 и/или ротором 108. Например, согласно некоторым вариантам осуществления, толщина и/или типы материалов могут выбираться так, чтобы мог быть достигнут требуемый вес. Однако в других вариантах осуществления предусматривается, что при необходимости грузики могут прикрепляться к статору 104 и/или ротору 108. Например, согласно некоторым вариантам осуществления торцевой колпачок 114 может включать в себя шайбу, который может быть прикреплена к его боковой поверхности так, что шайба располагается между концом торцевого колпачка 114 и соседней шайбой, и вал проходит через центральный проем шайбы. Согласно другим вариантам осуществления материал может быть удален из одного или более из статора 104 и ротора 108 для достижения требуемого веса и/или момента инерции.
Торцевые колпачки 114 могут включать в себя язычки 116, которые могут проходить по наружному периметру центрального участка 128 статора 104 для точного расположения торцевых колпачков 114 относительно статора 104. Торцевые колпачки 114 могут включать в себя подшипники 118, имеющие проемы 124, через которые может проходить вал 102 и которые могут поддерживать статор 104 относительно вала 102. Соответственно, статор 104 может поддерживаться ротором 106. Подшипники 118 могут уменьшать трение между поверхностью соответствующего подшипника 118 и валом 102 так, что ротор 106 может совершать возвратно-поступательные движения радиально и/или продольно относительно статора 104. В некоторых вариантах осуществления предусматривается, что подшипники 118 могут включать в себя подшипники скольжения (например, снижающую трение поверхность и т. д.), гидростатические подшипники, шарикоподшипники и/или тому подобное для снижения трения между подшипниками 118 и валом 102, так чтобы ротор 106 (и его вал 102) и статор 104 могли свободно двигаться (например, вдоль или вокруг LA) относительно друг друга и/или подшипников 110 при работе EMA 100.
Ротор 106 может иметь предпочтительное осевое положение благодаря магнитной установке EMA 100. Например, железные сердечники EMA 100 могут быть смещены (например, магнитными силами постоянных магнитов EMA 100) так, что они выровнены относительно середины соседних постоянных магнитов, Это может быть известно как предпочтительное положение ротора 106 относительно статора 104. Смещающие элементы 108 (например, цилиндрические пружины) на каждой стороне статора 104 могут дополнительно смещать статор 104 в предпочтительное положение (например, по оси и поворотно). Соответственно, вне использования (например, в выключенном состоянии), магнитные силы из-за постоянных магнитов EMA 100 могут смещать ротор 106 и статор 104 в положение отключения или предпочтительное положение.
На фиг. 2 представлена EMA 100, установленная в устройстве (200) индивидуального ухода (PCD) согласно вариантам осуществления настоящей системы. Устройство (200) индивидуального ухода может включать в себя автоматическую зубную щетку 256, имеющую корпус 242 с ручкой 258, по меньшей мере одну стенку 260, которая образует по меньшей мере часть полости 248, в которой может располагаться EMA 100. В частности, подшипники 110 могут соединяться с корпусом 242 с использованием любого подходящего способа, например, фрикционного соединения, адгезивов, язычков, стопорных колец, винтов и т.д. Положение подшипников 110 может быть таково, что смещающие элементы 108 имеют требуемую предварительную нагрузку.
Вал 102 может соединятьсяе с удлинением 240, которое может проходить между валом 102 и рабочим элементом 242, например, чистящей головкой, имеющей множество щетинок 246, расположенных на одном конце рабочего элемента 242. Удлинение 240 может проходить через проем 244 в корпусе 242. Ручка 258 может быть выполнена с возможностью захвата пользователем.
PCD 200 может дополнительно включать в себя контроллер 250, устройство 222 накопления энергии, например, аккумулятор и/или конденсатор, и необязательное индуктивное зарядное устройство 254. Индуктивное зарядное устройство 254 может включать в себя по меньшей мере одну катушку, которая может генерировать наведенный сигнал при воздействии внешнего электромагнитного поля и может подавать этот наеденный сигнал на соединенный с ним контроллер 250. Контроллер 250 может затем обрабатывать входной наведенный сигнал и сохранять обработанный наведенный сигнал в устройстве 252 накопления энергии для дальнейшего использования. Контроллер 250 может соединяться с одним или более электромагнитом EMA 100, которые могут обеспечивать электромагнитную силу для возвратно-поступательного приведения в действие вала 102 линейно и/или поворотно. Контроллер 250 может генерировать и подавать управляющий сигнал каждому из одного или более электромагнитов для генерирования соответствующего магнитного поля. Каждый управляющий сигнал может иметь требуемую частоту, напряжение и амплитуду, которые могут определяться контроллером 250. Контроллер 250 может формировать управляющий сигнал для включения в него требуемого типа сигнала, например, синусоидального сигнала (например, сигнала переменного тока (AC)), сигнала широтно-полюсной модуляции (PWM) и т.д., как может быть необходимо. Таким образом, контроллер 250 может приводить в действие электромагниты EMA 100 с требуемой частотой, формой сигнала и/или коэффициентом заполнения. Переключатель вкл/выкл может обеспечиваться для предоставления сигнала контроллеру 250 на включение или выключение EMA 100 и может, например, устанавливаться на поверхности корпуса 242, например, при необходимости, на поверхности 248 ручки 258.
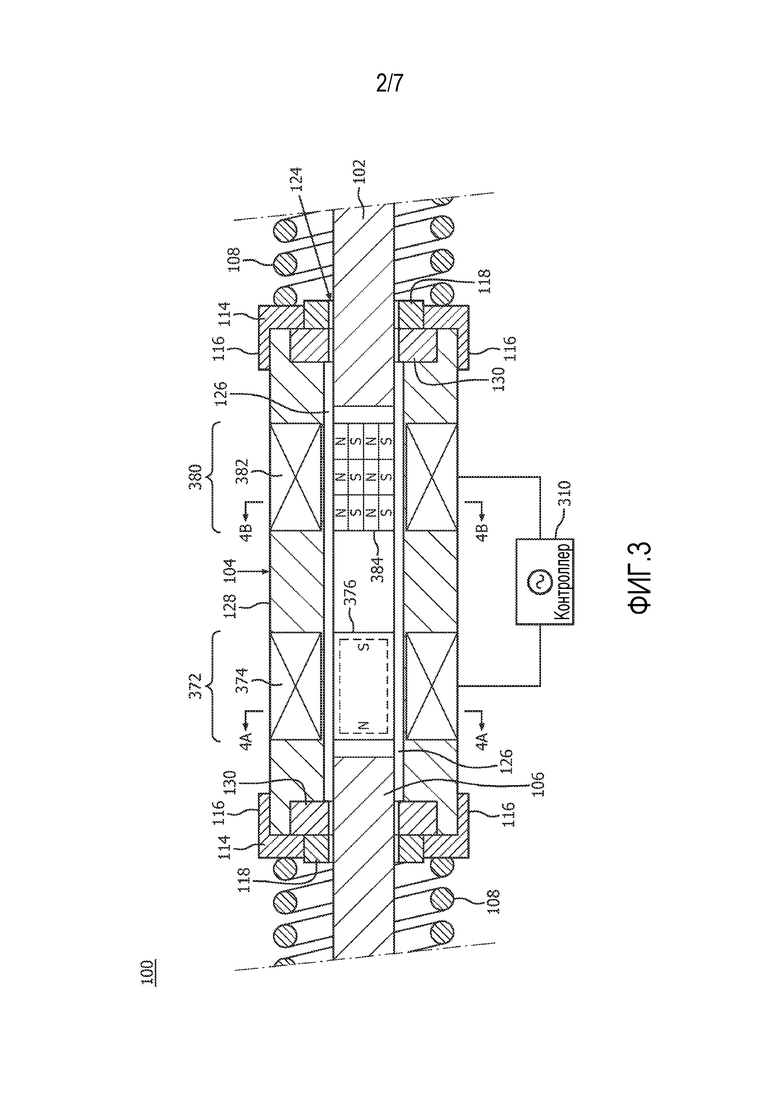
На фиг. 3 представлен подробный вид в поперечном разрезе участка EMA 100, изображенного на фиг. 1 согласно вариантам осуществления настоящей системы. По меньшей мере один электромагнит может включать в себя линейный блок (372) электромагнита и поворотный блок 380 электромагнита. Линейный блок 372 электромагнита может включать в себя по меньшей мере один электромагнит, например, электромагнит 374, который может генерировать магнитное поле (например, первое электромагнитное поле), которое может взаимодействовать с магнитным полем по меньшей мере одного магнита 376 ротора 106, чтобы вызвать линейное притягивание или отталкивание ротора 106 (и прикрепленного к нему вала 102) посредством этого взаимодействия, зависящего от полярности первого магнитного поля. Однако, поскольку и статор 104, и ротор 106 могут свободно двигаться линейно относительно друг друга, они совершают возвратно-поступательные движения относительно друг друга с амплитудой около 180 градусов не в фазе. Аналогично, поворотный блок 380 электромагнита может включать в себя по меньшей мере электромагнит, например, электромагнит 382, который может генерировать магнитное поле (например, второе электромагнитное поле), которое может взаимодействовать с магнитным полем другого по меньшей мере одного магнита 384 ротора 106, чтобы вызвать линейное притягивание или отталкивание ротора 106 посредством этого взаимодействия, зависящего от полярности первого магнитного поля. Однако, поскольку и статор 104, и ротор 106 могут свободно поворотно двигаться относительно друг друга, они совершают поворотные возвратно-поступательные движения относительно друг друга с амплитудой около 180 градусов не в фазе.
Контроллер 310 может приводить в действие электромагнит(ы) EMA 100, например, электромагнит 374 и/или электромагнит 382. Соответственно, контроллер 310 может генерировать и выводить по меньшей мере один управляющий сигнал для приведения в действие электромагнитов 374, 382 EMA 100. Например, контроллер может генерировать первый управляющий сигнал (DRV1), который может подаваться на электромагнит 374 и может генерировать второй управляющий сигнал (DRV2) и подавать этот управляющий сигнал на электромагнит 382 для приведения в действие соответственно электромагнитов 374 и 382, чтобы они выводили магнитное поле согласно их соответствующим управляющим сигналам. В некоторых вариантах осуществления первый и второй управляющие сигналы могут быть одинаковыми или могут отличаться друг от друга одним или более из амплитуды, частоты, формы волны и/или коэффициентом заполнения. Однако для ясности предполагается, что первый и второй управляющие сигналы тождественны друг другу и включают в себя синусоидальную форму сигнала (например, форму сигнала переменного тока (AC)), имеющего частоту, соответствующую линейной и поворотной частоте статора 104 и ротора 106. В других вариантах осуществления предусматривается, что управляющий сигнал может включать в себя сигнал широтно-импульсной модуляции (PWM), имеющий требуемый коэффициент заполнения, фазу, форму (например, форму синусоидальной, прямоугольной волны и т.д.) и/или частоту. Согласно некоторым вариантам осуществления контроллер 310 может предоставлять по меньшей мере один управляющий сигнал по меньшей мере одному из электромагнитов 374 и 382, используя любое подходящее соединение, например, проводное соединение.
Контроллер 310 может соединяться с электромагнитами 374 и 382 с использованием любого подходящего проводника, например, ленты, кабеля, скользящего кольца, беспроводной схемы и т.д. Дополнительно предусматривается, что в некоторых вариантах осуществления смещающие элементы 108 могут быть электрически изолированы друг от друга и при необходимости могут соединять контроллер 310 соответственно с первым и/или вторым электромагнитами 374 и 382.
Ротор 106 может иметь линейную и поворотную резонансные частоты, и статор 104 может иметь линейную и поворотную частоты. Линейная и поворотная резонансные частоты вала 102 и статора 104 могут соответствовать друг другу. Соответственно, и ротор и статор могут резонировать в системе по существу с одной и той же линейной и/или поворотной частотой. Затем, при приведении в действие исполнительными устройствами с их резонансными частотами вал 102 и статор 104 могут совершать возвратно-поступательные движения линейно и поворотно с частотой, приблизительно или по существу равной их резонансным частотам, и образовывать резонансную систему, приводимую в действие с приводной частотой. Согласно некоторым вариантам осуществления управляющий сигнал может иметь частоту, которая незначительно отличается от (например, по существу на пороговое значение от соответствующих резонансных частот, как может быть необходимо), но не равна одной или более резонансной частоте для обеспечения устойчивости системы.
При приведении в действие, например, с их линейной и/или поворотной резонансной частотами (например, используя управляющий сигнал AC или сигналы, генерированные контроллером 310), статор 104 совершает возвратно-поступательные движения линейно и поворотно в противофазе (например, на 180 градусов не в фазе) с ротором 106, который действует в качестве поворотного и линейного противовеса для амортизации, соответственно, поворотной и линейной вибрации.
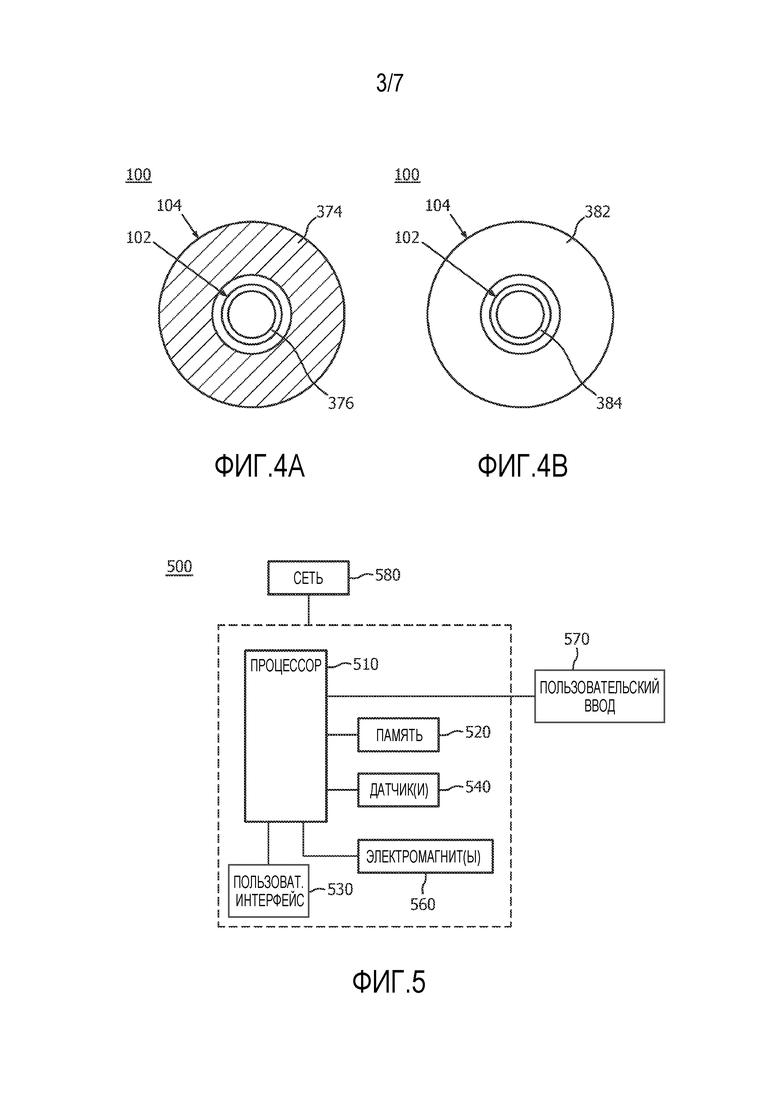
На фиг. 4A представлен вид сбоку в поперечном разрезе, выполненном по линиям 4A-4A на фиг. 3, участка системы 100 зубной щетки согласно вариантам осуществления настоящей системы; а на фиг. 4B представлен вид сбоку в поперечном разрезе выполненном по линиям 4B-4B на фиг. 3, участка системы 100 зубной щетки согласно вариантам осуществления настоящей системы.
Поворотная или линейная конструкция электромагнитного двигателя (EMA) описана в настоящем документе со ссылкой на фиг. 6-9. Каждый из этих двигателей может относиться к типу (например, линейному или поворотному), который обеспечивает, соответственно, возвратно-поступательный линейный или поворотный вывод на выводном валу. Однако, если требуется и линейный, и поворотный вывод на выводном валу, два или более этих EMA различных типов могут соединяться с одним выводным валом. Например, EMA линейного типа может соединяться с выводным валом EMA поворотного типа и при приведении в действие контроллером обеих EMA линейного и поворотного типа, выводной вал может обеспечивать вывод линейного и поворотного возвратно-поступательного движения. Соответственно, линейная и поворотная EMA могут располагаться вдоль выводного вала последовательно.
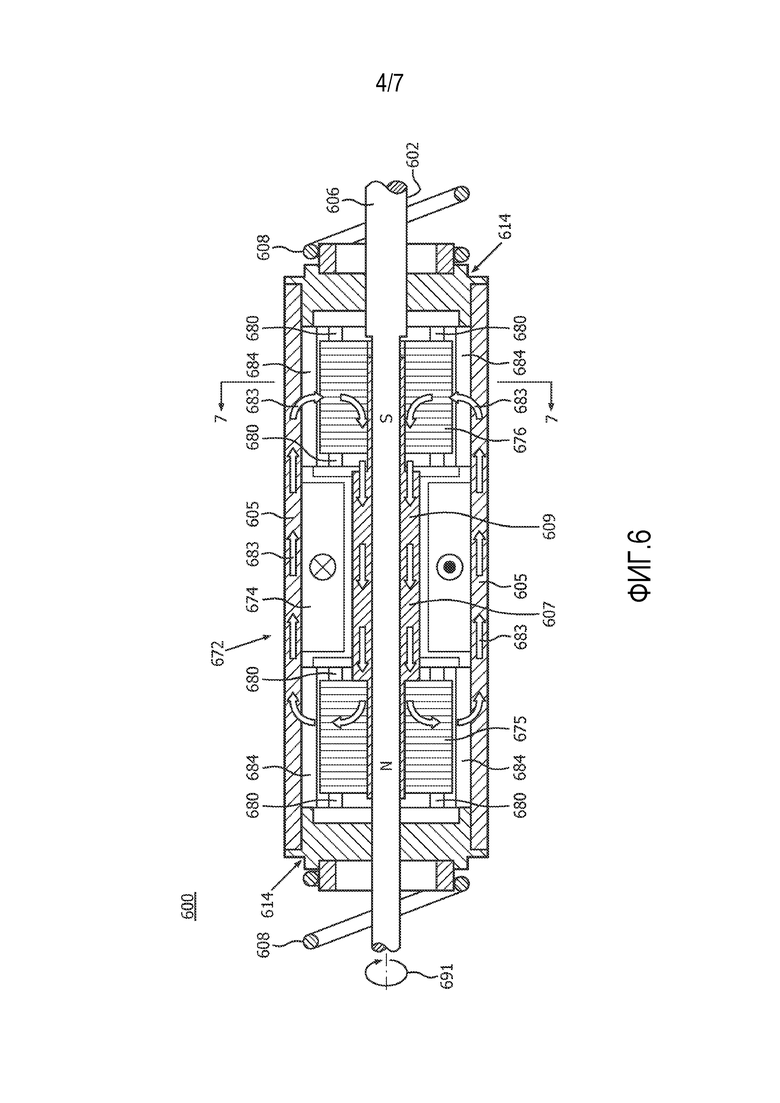
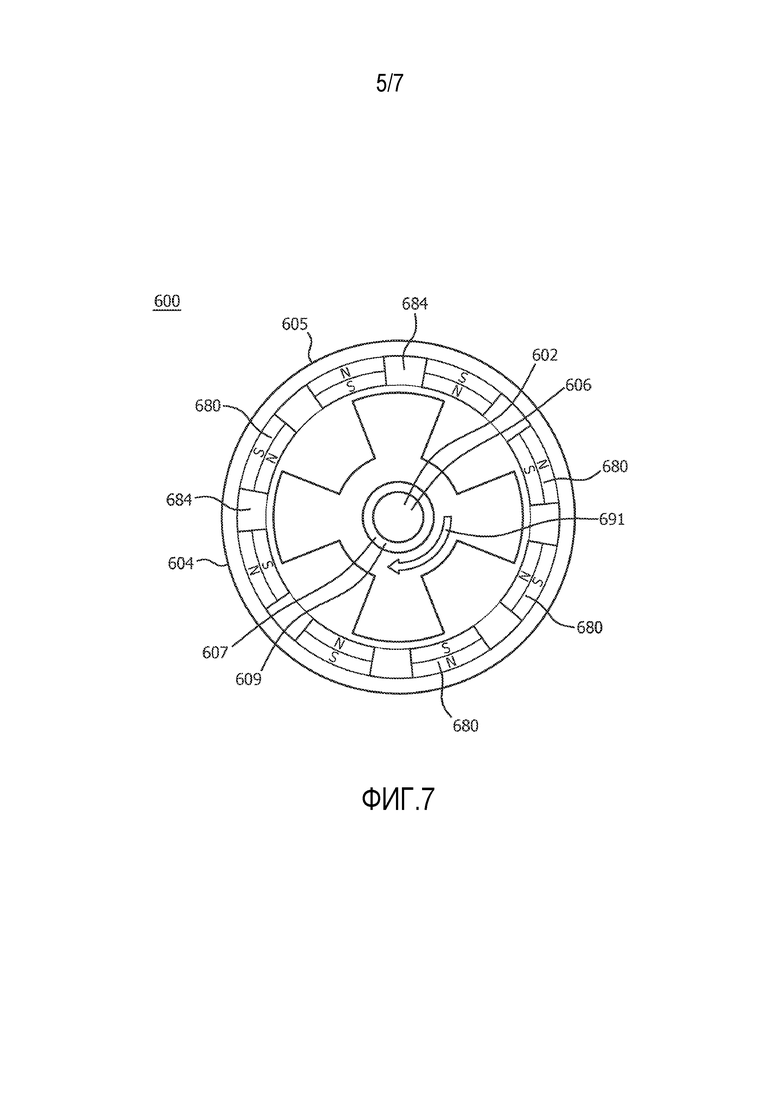
На фиг. 6 представлен подробный вид в поперечном разрезе участка EMA 600, использующий единственный электромагнит согласно вариантам осуществления настоящей системы. EMA 600 может быть аналогичен EMA 100 и может включать в себя статор 604, ротор 606, торцевые колпачки 614 и смещающие элементы 608, которые, соответственно, аналогичны статору 104, ротору 106, торцевым колпачкам 114 и смещающим элементам 108 EMA 100. Однако вместо использования двойных блоков исполнительных устройств (например, линейного и поворотного), как может использоваться в случае EMA 100, EMA 600 может включать в себя единственный блок 672 катушки для поворотного движения. Кроме того, колпачки 614 могут включать в себя внутренние подшипники для скользящей и/или поворотной поддержки статора 604 относительно ротора 606. Блок 672 катушки может включать в себя по меньшей мере одну катушку 674, которая может генерировать электромагнитное поле для приведения в действие по меньшей мере ротора 606 и статора 604 в противоположных направлениях поворотно друг от друга, как описано ниже. В частности, концевые участки 675 и 676 могут представлять собой электромагниты, которые могут принимать магнитную полярность при помещении в электромагнитное поле, генерированное указанной по меньшей мере одной катушкой 674.
Ротор 606 может включать в себя вал 602, имеющий внутренний участок 607, имеющий высокую магнитную проницаемость, для направления магнитного поля в требуемом направлении, неподвижно прикрепленный к валу 602. Внутренний участок 607 может включать в себя центральный участок 609 и концевые участки 675 и 676. Концевые участки 675 и 676 могут располагаться на противоположных сторонах указанной по меньшей мере одной катушки 674.
Аналогично ротору 606 статор 604 может иметь внутреннюю область высокой магнитной проницаемости для направления электромагнитного поля. Например, внутренняя область статора 604 может включать в себя область оболочки 605 и/или необязательные разделители 684, которые могут не допускать соприкосновения участков соседних компонентов, например, во время сборки и т. д. Кроме того, ротор может включать в себя постоянные магниты, например, магниты 680, которые могут иметь полярность, как представлено на чертеже.
Внутренние области ротора 606 и статора 604 могут взаимодействовать с магнитным полем или иным образом направлять магнитное поле, чтобы поворотно притягиваться или отталкиваться друг от друга для движения не в фазе друг с другом. Притягивание и/или отталкивание может зависеть от полярности (например, направления) магнитного поля. Поскольку и статор 604, и ротор 606 могут свободно двигаться линейно относительно друг друга, силы притяжения и отталкивания, генерированные направлением переменного магнитного поля, будут вызывать поворотные возвратно-поступательные движения статора 604 и ротора 606 относительно друг друга не в фазе со сдвигом примерно 180 градусов.
Указанная по меньшей мере одна катушка 674 может приводиться в действие контроллером системы с использованием любого подходящего управляющего сигнала, такого как рассмотренный в других местах настоящего документа. Контроллер может соединяться с указанной по меньшей мере одной катушкой 674 с использованием любого подходящего проводника, например, ленты, кабеля, скользящего кольца и т.д. Однако в других вариантах осуществления предусматривается, что смещающие элементы 608 могут быть электрически изолированы друг от друга и при необходимости могут соединять контроллер с указанной по меньшей мере одной катушкой 674. В других вариантах осуществления предусматривается, что контроллер может соединяться с указанной по меньшей мере одной катушкой 674 с использованием любого подходящего способа соединения.
На фиг. 7 представлен вид сбоку в поперечном разрезе, выполненном по линии 7-7 на фиг. 6, участка EMA 600 согласно вариантам осуществления настоящей системы. Магнитное поле, генерированное указанной по меньшей мере одной катушкой 674, может направляться внутренними участками ротора 606 и статора 604 в требуемом направлении, как представлено стрелками 683 (при приведении в действие током в первом направлении, как представлено на фиг. 6), которое может привести к возникновению сил (например, в направлении стрелки 691), которые могут вызвать поворотное движение ротора 606 в направлении стрелки 691, при этом статор 604 может двигаться поворотно в противоположном направлении.
При обращении к фиг. 6 и 7, на фиг. 6 стрелки 683 иллюстрируют магнитный поток для первичной контура (представленного в виде контура типа "восьмерки" на виде сверху). Кроме того, ротор и/или статор 604 может включать в себя при необходимости постоянные магниты для формирования других магнитных полей.
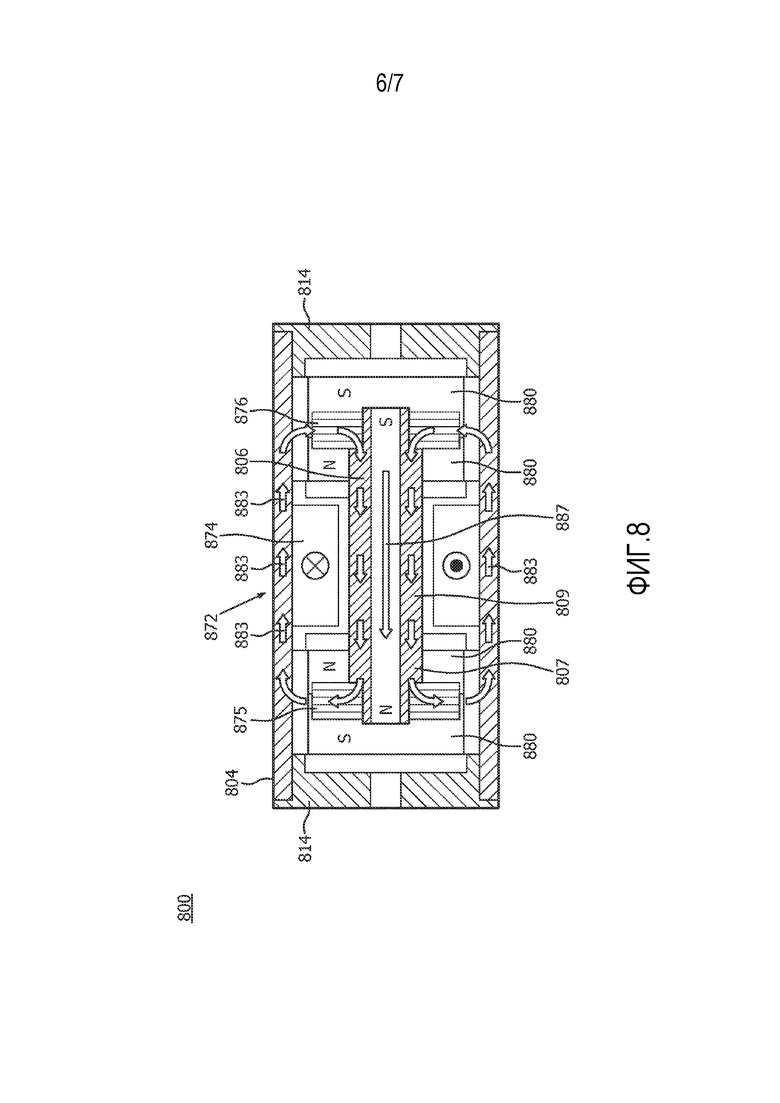
На фиг. 8 представлен подробный вид в поперечном сечении участка EMA 800, использующего единственный электромагнит согласно вариантам осуществления настоящей системы. EMA 800 может быть аналогичен EMA 600 и может включать в себя статор 804, ротор 806, торцевые колпачки 814 и смещающие элементы, которые соответственно аналогичны статору 604, ротору 606, торцевым колпачкам 614 и смещающим элементам 608 EMA 600. Однако статор 804 может иметь иную конструкцию 880 постоянного магнита, чем у статора 604. Например, постоянные магниты 880 могут располагаться с полярностью, как представлено на чертеже. Блок 872 катушки может включать в себя по меньшей мере одну катушку 874, которая может генерировать электромагнитное поле (например, см. стрелки 883) для приведения в действие по меньшей мере ротора 806 и статора 804 линейно в противоположных друг другу направлениях, как рассмотрено ниже. Например, когда электромагнитное поле проходит в направлении стрелок 883, сила (показанная стрелкой 887) может приводить в действие ротор 806 в соответствующем направлении. Ротор 806 может включать в себя вал, имеющий внутренний участок 807 с высокой магнитной проницаемостью для направления магнитного поля в требуемом направлении, неподвижно прикрепленный к валу. Внутренний участок 807 может включать в себя центральный участок 809 и электромагниты 875 и 876. Электромагниты 875 и 876 могут располагаться на противоположных сторонах указанной по меньшей мере одной катушки 874. Для ясности участок вала ротора 806 не представлен. EMA 800 может быть по существу радиально симметричным.
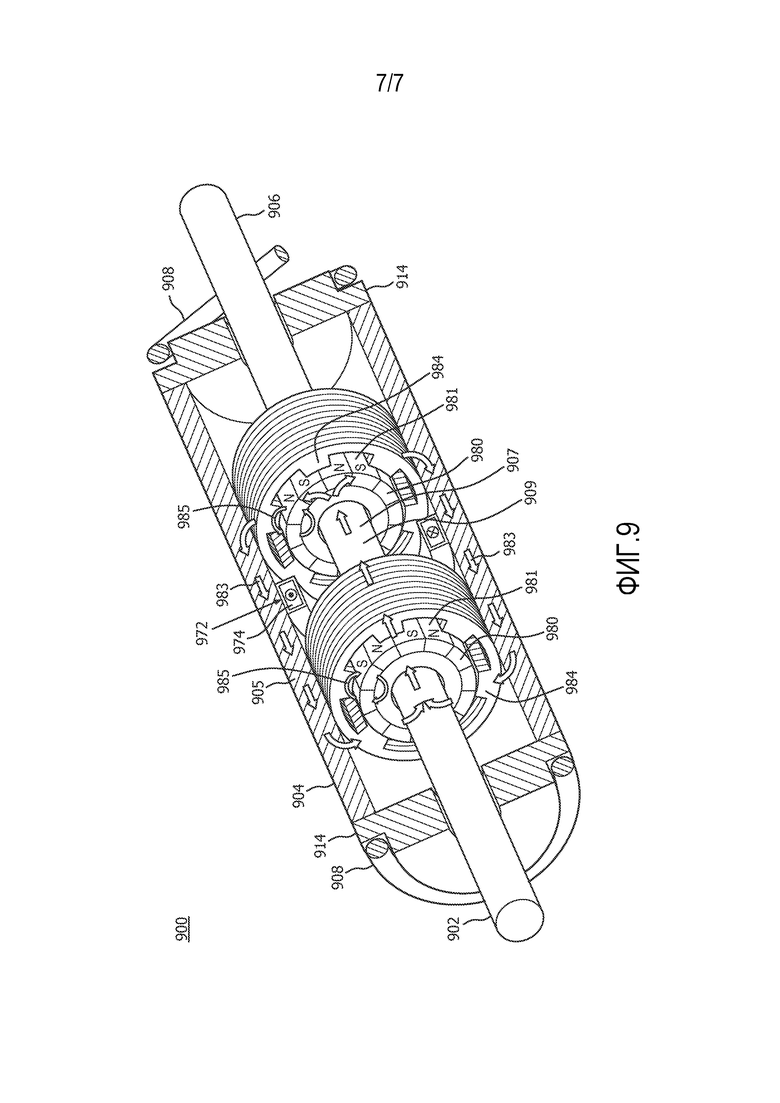
На фиг. 9 представлен подробный вид спереди в перспективе с частичным разрезом участка EMA 900 согласно вариантам осуществления настоящей системы. EMA 900 может быть аналогичен EMA 600 и может включать в себя статор 904, ротор 906, торцевые колпачки 914, по меньшей мере одну катушку 972 и смещающие элементы 908, которые, соответственно, аналогичны статору 604, ротору 606, торцевым колпачкам 614, по меньшей мере одной катушке 672 и смещающим элементам 608 EMA 600. Однако EMA 900 может иметь иную конструкцию постоянного магнита, чем у EMA 600. Например, ротор 906 может включать в себя конфигурации 981 постоянного магнита, неподвижно прикрепленные к ротору 906 и расположенные на противоположных сторонах по меньшей мере одной катушки 972.
Каждая из конфигураций 981 постоянных магнитов может включать в себя множество радиально расположенных постоянных магнитов 980. Кроме того, статор 904 может включать в себя электромагниты 984, имеющие высокую магнитную проницаемость и расположенные на противоположных сторонах указанной по меньшей мере одной катушки 972, для направления магнитного поля, генерированного электромагнитами 984 в требуемом направлении, например, представленном стрелками 983. Может обеспечиваться многослойная конструкция для снижения вихревых токов и, таким образом, для снижения потерь энергии при использовании. При работе катушка 974 может генерировать электромагнитное поле (например, см. стрелки 983) для приведения в действие по меньшей мере ротора 906 и статора 904 линейно в противоположных друг другу направлениях, как рассмотрено ниже. Ротор 906 может включать в себя вал 902, имеющий внутренний участок 907 с высокой магнитной проницаемостью, для направления магнитного поля в требуемом направлении, который может неподвижно прикрепляться к валу 902. Кроме того, внутренний участок 907 может включать в себя центральный участок 909.
При использовании в EMA 900 могут создаваться первичный и вторичный магнитные контуры. Первичное магнитное поле может быть проиллюстрировано контурами, образованными стрелками 983, а вторичное магнитное поле может быть проиллюстрировано стрелками 985, как представлено на чертеже. Первичные контуры могут обеспечивать связывающий магнитный поток (связанный с крутящим моментом) и магнитную пружину (например, в направлении вперед). Вторичные контуры могут работать для обеспечения магнитной пружины (например, в реверсивном (например, противоположном) направлении). Таким образом, большой контур может в целом обеспечивать крутящий момент, а малые контуры могут в целом обеспечивать жесткость.
Таким образом, варианты осуществления настоящей системы обеспечивают резонансный двигатель, например, EMA, который включает в себя внутренний ротор (образованный ротором 106) и наружный статор (например, статор 104), при этом указанный двигатель (например, EMA 100) выполнен так, чтобы и внутренний ротор, и наружный статор обладали возможностью движения не в фазе друг с другом, устраняя или снижая вибрацию, передаваемую пользователю. Заземленные подшипники могут обеспечиваться для поддержки ротора и подшипников между ротором и статором двигателя. Наружный статор выполнен с возможностью поступательного перемещения и по оси и поворотно с небольшим диапазоном движения, и статор может быть прикреплен к земле (например, к корпусу) посредством смещающего элемента, например, пружины (например, цилиндрической пружины или тому подобного). Однако в других вариантах осуществления предусматривается, что смещающий элемент может включать в себя любой подходящий смещающий элемент, например, упругий (например, пластиковый) элемент. Аналогично, внутренний ротор выполнен с возможностью поступательного перемещения и по оси, и поворотно с небольшим диапазоном движения относительно наружного статора. И внутренний ротор, и наружный статор выполнены с возможностью поступательного перемещения и по оси и поворотно с небольшим диапазоном движения относительно земли и не в фазе друг с другом (например, внутренний ротор и наружный статор). Наружный статор может включать в себя по меньшей мере один электромагнит, выполненный с возможностью взаимодействия с магнитным полем магнита внутреннего ротора, чтобы вызвать линейное и поворотное притягивание или отталкивание внутреннего ротора и наружного статора магнитным полем в зависимости от полярности магнитного поля. Контроллер может обеспечиваться для приведения в действие электромагнита(ов) с помощью по меньшей мере одного управляющего сигнала (DRV) так, чтобы полярности магнитных полей, генерированные электромагнитом, чередовались так, чтобы возвратно-поступательно, линейно и поворотно, приводить в действие внутренний ротор и наружный статор не в фазе (например, со сдвигом по фазе на 180 градусов) друг с другом. Это несовпадающее по фазе возвратно-поступательное и линейное движение между наружным статором и внутренним ротором действует для амортизации или иного ослабления вибрации для недопущения вибрации ручки корпуса, которая может вызвать дискомфорт пользователя.
В других вариантах осуществления может обеспечиваться устройство индивидуального ухода, которое может включать в себя по меньшей мере одно из зубной щетки и устройства для очистки межзубных промежутков.
Дополнительно предусматривается, что в других вариантах осуществления EMA может быть выполнена, как требуется, и иметь размеры согласно предполагаемой нагрузке. Например, EMA для детской зубной щетки может иметь форму, аналогичную форме EMA взрослой зубной щетки, но иметь меньший размер. Кроме того, в других вариантах осуществления EMA может иметь собственный кожух и может быть собрана в этом кожухе. Соответственно, EMA в сборе (например, картридж EMA) может быть вставлена как единый блок в наружный кожух зубной щетки. Может обеспечиваться контроллер, и он может объединяться с EMA в сборе (например, картриджем EMA) или может быть отделен от EMA в сборе и прикреплен к EMA в сборе по время вставки в наружный кожух зубной щетки.
Дополнительно предусматривается, что в варианте осуществления настоящей системы внутренний ротор может включать в себя выводной вал, например, приводной вал. Внутренний ротор может быть установлен на подшипниках, которые механически заземлены на наружный кожух (например, участок корпуса) зубной щетки (или на кожух EMA при использовании EMA-картриджа). Это может определять положение линейной оси (например, см. LA) двигателя относительно наружного кожуха зубной щетки. Кроме того, подшипники могут быть выполнены с возможностью поддержания внутреннего ротора, чтобы при использовании внутренний ротор сохранял требуемое общее положение и/или ориентацию относительно наружного кожуха зубной щетки.
Могут обеспечиваться смещающие элементы, например, пружины, которые могут соединяться с землей (например, неподвижным участком корпуса зубной щетки) на одной стороне и соединяться с наружным статором на другой и могут действовать для смещения наружного статора в требуемое положение и/или ориентацию относительно наружного кожуха зубной щетки. Соответственно, наружный статор может располагаться линейно и поворотно (например, под углом) относительно наружного кожуха зубной щетки, и может быть смещен обратно в нейтральное положение смещения (и радиально, и линейно) при отсутствии каких-либо сил, приложенных к наружному статору. При работе зубной щетки (когда на EMA подается энергия) наружный статор и внутренний ротор поступательно перемещаются и поворачиваются относительно наружного кожуха зубной щетки, и наружный статор и внутренний ротор двигаются не в фазе друг с другом и линейно, и поворотно, что может ослаблять или иным образом амортизировать вибрацию.
Блок рабочего элемента может съемно прикрепляться к внутреннему ротору и может включать в себя множество щетинок или других элементов (например, скребков для чистки зубов и т.д.), которые могут образовывать чистящую головку. Один или более электромагнитов могут обеспечиваться для приведения в действие внутреннего ротора и линейно и поворотно (например, под углом) относительно наружного кожуха зубной щетки с движением и силой, достаточными для того, чтобы при работе при помощи зубной щетки обеспечивалась надлежащая для предполагаемого использования эффективность (например, удаление бляшки). Аналогично, при использовании электромагниты могут приводить в движение наружный статор и линейно, и поворотно (например, под углом) относительно внутреннего ротора для амортизации или иного ослабления вибрации. Это активная амортизация вибрации (например, снижение вибрации) может снижать вибрацию, ощущаемую пользователем во время использования, для увеличения удобства пользователя. Таким образом, при использовании (в предположении, что рабочий элемент прикреплен к внутреннему ротору) внутренний ротор двигается достаточно для обеспечения надлежащей эффективности (удаления бляшки), при этом наружный статор движется достаточно для устранения сил вибрации (поворотно и/или линейно). Пружина обеспечивает возможность статора двигаться в противофазе с ротором, устраняя большую часть сил ускорения, вызванных движением ротора. Силы ускорения, переданные кe кожух, определяются перемещением статора и жесткостью пружины. Отношение перемещения статора к перемещению ротора определяется отношением масса/инерция. При этом фактическая сила, прилагаемая к кожуху, представляет собой произведение перемещения и жесткости соединительного элемента (пружин). Сила, действующая на кожух в соответствии с массой/инерцией кожуха, приводит к перемещению кожуха, которое ощущается как вибрация. Очень жесткая пружина не позволяет статору достаточно перемещаться, поэтому ослабление вибрации низкое, очень слабая пружина хорошо работает на устранение вибрации, но ухудшает характеристики ротора при нагрузке.
Кроме того, согласно некоторым вариантам осуществления настоящей системы для подачи электрической энергии на наружный статор (например, на по меньшей мере один электромагнит наружного ротора) могут быть предусмотрен электропроводящий элемент, например, лента, проволока, группа проволок и т. д. Например, согласно некоторым вариантам осуществления, этот электрический проводник может быть подключен между контроллером и наружным статором для подачи энергии от контроллера к наружному статору (например, к по меньшей мере одному статору соленоида). Однако в других вариантах осуществления предусматривается, что смещающие элементы могут быть проводящими и подавать электрическую энергию на наружный статор. Например, предусматривается, что в некоторых вариантах осуществления смещающие элементы могут быть электрически изолированы друг от друга и электронно соединены с наружным статором для подачи электрической энергии на по меньшей мере один электромагнит наружного статора. Кроме того, в других вариантах осуществления предусматривается, что наружный статор может включать в себя один или более постоянных магнитов и/или слоистых участков.
На фиг. 5 представлен участок системы 500 согласно вариантам осуществления настоящей системы. Например, участок настоящей системы 500 может включать в себя процессор 510 (например, контроллер), функционально соединенный с памятью 520, пользовательским интерфейсом (UI) 530, датчиками 540, электромагнитами 560 и участком 570 пользовательского ввода. Память 520 может представлять собой любой тип устройства для хранения прикладных данных, а также других данных, связанных с описанной работой. Прикладные данные и другие данные принимаются процессором 510 для конфигурирования (например, программирования) процессора 510 для выполнения рабочих действий согласно настоящей системе. Сконфигурированный таким образом процессор 510 становится специализированным устройством, в особенности подходящим для выполнения согласно вариантам осуществления настоящей системы.
Рабочие действия могут включать в себя конфигурирование системы 500, например, посредством конфигурирования процессора 510, для получения информации от пользовательских вводов, например, от участка 570 пользовательского ввода и/или памяти 520 и обработки этой информации согласно вариантам осуществления настоящей системы для определения соответствующего выходного сигнала (например, управляющего сигнала) для приведения в действие электромагнитов 560. Участок 570 пользовательского ввода может включать в себя переключатель, например, переключатель вкл/выкл и/или переключатели выбора функции (например, для выбора режимов очистки), кнопочную панель, мышь, шаровой манипулятор и/или другое устройство, включающее в себя сенсорные дисплеи, которые могут быть самостоятельными устройствами или представлять собой часть системы, например, часть OHD, персонального компьютера, ноутбука, нетбука, планшета, смартфона, персонального цифрового помощника (PDA), мобильного телефона, и/или другого устройства для соединения с процессором 510 посредством любого действующего соединения. Участок 570 пользовательского ввода может действовать для взаимодействия с процессором 510, включающим в себя обеспечение взаимодействия с UI, как описано в настоящем документе. Очевидно, что процессор 510, память 520, UI 530 и/или участок 570 пользовательского ввода могут все или частично представлять собой участок компьютерной системы или другое устройство, например, клиент и/или сервер, как описано в настоящем документе.
Процессор 510 может визуализировать информацию, которую он генерировать, например, уровень заряда батареи, необходимость заряда батареи, режим работы (например, зарядка, работа, ошибка и т.д.) и т.д., на UI 530, например, на дисплее системы (например, на графическом дисплее, светодиодах (LEDs), жидкокристаллическом дисплее (LCD) и т.д.)
Способы по настоящей системе особенно подходят для воплощения процессором, запрограммированным компьютерной программой, причем такая программа содержит модули, соответствующие одному или более отдельным этапам или действиям, описанным и/или предусмотренным настоящей системой.
Процессор 510 выполнен с возможностью обеспечения управляющих сигналов и/или выполнения операций в ответ на входные сигналы от участка 570 пользовательского ввода, а также в ответ на другие устройства сети 580 и выполнение инструкций, хранящихся в памяти 520. Например, процессоры 510 могут получать информацию обратной связи от датчиков 540 и могут обрабатывать эту информацию для определения режимов работы. Например, когда датчики 540 показывают, что индуктивная зарядная катушка обеспечивает индуктивную зарядку, процессор 510 может обеспечивать возможность режим зарядки аккумулятора для зарядки при необходимости одного или более устройств накопления энергии (например, аккумуляторов, конденсаторов) системы 500. Процессор 510 может включать в себя одно или более из микропроцессора, интегральной схемы(схем) специального или общего назначения, логического устройства и т.д. Кроме того, процессор 510 может представлять собой специализированный компьютер для выполнения согласно настоящей системе или может представлять собой универсальный процессор, в котором только одна из множества функций работает на выполнение согласно настоящей системе. Процессор 510 может работать, используя программный участок, многопрограммные сегменты, или может представлять собой аппаратное устройство, использующее специально предназначенную или многоцелевую интегральную схему.
Хотя настоящее изобретение представлено и описано со ссылкой на частные примерные варианты осуществления, специалистам в данной области техники следует понимать, что настоящее изобретение этим не ограничивается, и что различные изменения в виде и подробностях, включающих в себя сочетание различных признаков и вариантов осуществления, могут быть выполнены в пределах смысла и объема изобретения.
Дополнительные варианты настоящей системы станут легко понятны специалисту в данной области техники и охватываются нижеприведенной формулой.
В заключении, приведенное выше обсуждение предназначено просто для иллюстрации настоящей системы и не должно истолковываться как ограничивающее приложенную формулу каким-либо частным вариантом осуществления или группой вариантов осуществления. Таким образом, хотя настоящая система описана со ссылкой на примерные варианты осуществления, следует также понимать, что специалистами в данной области техники может быть разработано множество модификаций и альтернативных вариантов осуществления без выхода за границы и предназначенный смысл и объем настоящей системы, как объяснено в приведенной ниже формуле. Кроме того, заголовки разделов, включенные в настоящий документ, предназначены для облегчения обзора, но не предназначены для ограничения объема настоящей системы. Соответственно, описание и чертежи должны расцениваться как иллюстративные и не должны рассматриваться как ограничивающие объем приложенной формулы.
Заголовки разделов, включенные в настоящий документ, предназначены для облегчения обзора и не предназначены для ограничения объема настоящей системы. Соответственно, описание и чертежи должны расцениваться как иллюстративные и не должны рассматриваться как ограничивающие объем приложенной формулы.
При толковании приложенной формулы следует понимать, что:
a) слово "содержащий" не исключает наличия элементов или действий, отличных от перечисленных в приведенной формуле;
b) упоминание элемента в единственном числе, не должно исключать наличия множества таких элементов;
c) указание ссылочных позиций в формуле не ограничивают ее объем;
d) некоторые "средства" могут быть представлены одним и тем же изделием или одной и той же реализованной аппаратно или программно структурой или функцией;
e) любой из раскрытых элементов может состоять из участков аппаратного обеспечения (например, включающих в себя дискретную и интегральную электронную схему), участков программного обеспечения (например, компьютерного программирования) и любого сочетания перечисленного;
f) участки аппаратного обеспечения могут состоять из аналогового и/или цифрового участков;
g) любое из раскрытых устройств или его участков может быть объединено с дополнительными участками или отделено от них, если иное не установлено специально;
h) не предполагается обязательной конкретной последовательности действий или этапов, если только иное не указано специально;
i) термин "множество", относящийся к элементу, включает в себя два или более из заявленных элементов и не подразумевает никакого конкретного диапазона для числа элементов; то есть множество элементов может представлять собой даже два элемента и может включать в себя неисчислимое число элементов; и
j) термин "и/или" и его производные следует понимать в том смысле, что только для одного или более из перечисленных элементов может требоваться наличие в системе согласно формуле и согласно одному или более вариантам осуществления настоящей системы.
Изобретение относится к области медицинской техники и предназначено для использования в электрических зубных щетках. Электрическая зубная щетка с устройством активной амортизации вибрации содержит корпус, первый и второй подшипники, первый и второй смещающие элементы, наружный статор и внутренний ротор. Корпус имеет по меньшей мере одну стенку и проем, при этом по меньшей мере одна стенка образует по меньшей мере часть полости. Первый и второй подшипники расположены на расстоянии друг от друга внутри полости, при этом первый и второй подшипники неподвижно соединены с корпусом внутри полости. Жесткость пружин первого и второго смещающих элементов по существу одинакова. Наружный статор содержит кожух статора, подвижно соединенный внутри полости, при этом наружный статор выполнен с возможностью поступательного перемещения как по оси, так и поворотно в диапазоне движения относительно корпуса. Статор и/или ротор включает в себя грузики для регулировки массы статора и/или ротора для настройки инерционных характеристик в осевом и/или поворотном направлении. Внутренний ротор содержит ротор, расположенный частично в кожухе и выполненный с возможностью поступательного перемещения как по оси, так и поворотно в диапазоне движения относительно наружного статора. Ротор содержит выводной вал и секцию, которая включает в себя по меньшей мере один магнит, причем выводной вал проходит (i) через указанную секцию, (ii) через полость кожуха статора и (iii) через проемы в первом и втором подшипниках. Указанный кожух статора дополнительно содержит участок, имеющий по меньшей мере один электромагнит, выполненный с возможностью генерирования магнитного поля для взаимодействия с магнитным полем указанного по меньшей мере одного магнита ротора для (i) возвратно-поступательного приведения в действие и внутреннего ротора, и наружного статора линейно и поворотно относительно корпуса и (ii) перемещения внутреннего ротора и наружного статора не в фазе друг с другом как линейно, так и поворотно для амортизации вибрации корпуса. Изобретение позволяет амортизировать вибрации для снижения линейных и угловых колебаний в электрической зубной щетке с активной амортизацией вибраций за счет возможности ротора поступательно перемещаться как по оси, так и поворотно и также статора совершать поступательные и вращательные движения. 5 з.п. ф-лы, 9 ил.
1. Электрическая зубная щетка с устройством активной амортизации вибрации, содержащая:
корпус (242), имеющий по меньшей мере одну стенку (260) и проем (244), при этом указанная по меньшей мере одна стенка (260) образует по меньшей мере часть полости (248);
первый и второй подшипники (110), расположенные на расстоянии друг от друга внутри полости (248), при этом первый и второй подшипники неподвижно соединены с корпусом (242) внутри полости (248);
первый и второй смещающие элементы (108, 608), причем жесткость пружин смещающих элементов по существу одинакова;
наружный статор, который содержит кожух (104, 604) статора, подвижно соединенный внутри полости (248), при этом наружный статор выполнен с возможностью поступательного перемещения как по оси, так и поворотно в диапазоне движения относительно корпуса (242), причем
статор и/или ротор включает в себя грузики для регулировки массы статора и/или ротора для настройки инерционных характеристик в осевом и/или поворотном направлении;
внутренний ротор, содержащий ротор (106, 606), расположенный частично в кожухе (104, 604) и выполненный с возможностью поступательного перемещения как по оси, так и поворотно в диапазоне движения относительно наружного статора, при этом указанный ротор содержит выводной вал (102, 602) и секцию, которая включает в себя по меньшей мере один магнит (376, 384), причем выводной вал (102, 602) проходит (i) через указанную секцию, (ii) через полость (126) кожуха (104, 604) статора и (iii) через проемы в первом и втором подшипниках (110),
при этом указанный кожух (104, 604) статора дополнительно содержит участок, имеющий по меньшей мере один электромагнит (374, 382, 674), выполненный с возможностью генерирования магнитного поля для взаимодействия с магнитным полем указанного по меньшей мере одного магнита (376, 384) ротора для (i) возвратно-поступательного приведения в действие и внутреннего ротора (106, 606), и наружного статора линейно и поворотно относительно корпуса (242) и (ii) перемещения внутреннего ротора и наружного статора не в фазе друг с другом как линейно, так и поворотно для амортизации вибрации корпуса (242).
2. Щетка по п. 1, причем кожух (104, 604) статора подвижно соединен с корпусом (242) внутри полости (248) с помощью первого и второго смещающих элементов (108, 608), расположенных между противоположными концами кожуха (104, 604) статора и соответствующего одного из первого и второго подшипников (110), при этом выводной вал (102, 602) дополнительно проходит (i) через указанную секцию, (ii) через полость (126) кожуха (104, 604) статора, (iii) через первый и второй смещающие элементы (108) и (iv) через проемы в первом и втором подшипниках (110)
3. Щетка по п. 2, в которой первый и второй смещающие элементы (108, 608) выполнены с возможностью линейного и поворотного смещения статора (104, 604) относительно корпуса (242).
4. Щетка по п.1, дополнительно содержащая контроллер (310), выполненный с возможностью генерировать по меньшей мере один управляющий сигнал для приведения в действие по меньшей мере одного электромагнита (374, 382) по существу с резонансной частотой пружинно-массовой системы кожуха (104) статора и ротора (106).
5. Щетка по п. 1, дополнительно содержащая рабочий элемент (242), имеющий чистящую головку из щетинок (246), соединенную с одним концом (122) выводного вала (102, 602).
6. Щетка по п. 1, в которой кожух (104, 604) статора поддерживается выводным валом (102, 602) ротора (106, 606), проходящим через проемы (124) в торцевых колпачках (114,614) кожуха (104, 604) статора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И ЗУБНАЯ ЩЕТКА, В КОТОРОЙ ОН ИСПОЛЬЗУЕТСЯ | 2007 |
|
RU2371142C2 |
| Аэродинамический холстообразователь | 1986 |
|
SU1348400A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА, ИМЕЮЩАЯ ДВИЖУЩУЮСЯ ПОВЕРХНОСТЬ ДЛЯ ПРОСМОТРА | 2004 |
|
RU2358687C2 |

