Область техники, к которой относится изобретение
[0001] Настоящее раскрытие направлено в целом на способы и системы обнаружения и измерения усилия, воздействующего на чистящую головку устройства для очистки полости рта, с использованием оптического датчика.
Предшествующий уровень техники
[0002] Надлежащая техника чистки зубов, включающая в себя продолжительность и охват чисткой, способствует обеспечению продолжительного здоровья зубов. Множество зубных проблем испытывают люди, которые или не чистят зубы регулярно или делают это ненадлежащим образом. Среди тех, кто регулярно чистит зубы, неправильные привычки чистки могут привести к плохому охвату чисткой и, таким образом, к ненадлежаще очищенным поверхностям.
[0003] Механизмы обратной связи являются одним из путей для обеспечения надлежащей техники чистки зубов. Существует множество механизмов обратной связи, разработанных для предоставления информации и зубной щетке, и пользователям устройств для очистки полости рта о сеансе чистки. Например, известные типы обратной связи включают в себя усилие чистки, например, помимо прочих, прилагает ли пользователь слишком маленькое или слишком большое усилие. Эти способы и техники предназначены для предоставления обратной связи зубной щетке, так чтобы можно было регулировать один или более параметров щетки, например, амплитуду или частоту чистки, и/или для предоставления обратной связи пользователю, так чтобы он мог улучшить технику чистки.
[0004] Для выполнения этих способов и техник необходимо иметь один или более датчиков в устройстве для очистки полости рта. Один такой датчик представляет собой датчик давления для определения давления, приложенного пользователем чистящей головкой к зубам и деснам. Обычно датчики давления содержат пружину в сочетании с датчиком Холла для измерения отклонения чистящей головки или приводного вала из-за чистящих усилий, воздействующих со стороны пользователя. Отклонение представляет собой меру величины усилия, которое пользователь прикладывает к зубной щетке.
[0005] Соответственно, в уровне техники сохраняется необходимость в системах и способах измерения перемещения чистящей головки устройства для очистки полости рта для определения усилий, действующих со стороны щетинистой головки в направлении зубов и десен. Например, усилия могут удобно отражаться измерением отклонения части чистящей системы.
[0005a] Некоторая информация, относящаяся к уровню техники, может быть найдена в патентных документах WO 2014/098950 и US 2012/310593.
Сущность изобретения
[0006] Настоящее раскрытие направлено на изобретательские способы и системы для измерения отклонения и поворота участка устройства для очистки полости рта с использованием оптического датчика, и использование этой информации для определения усилий, приложенных щетинистой головкой к зубам и деснам. Применительно к системе, выполненной с возможностью измерения отклонения и поворота посредством оптического датчика, изобретательские способы и системы обладают способностью более точного отслеживания усилий, прилагаемых пользователем во время сеанса чистки. Измерение отклонения и поворота также обеспечивает определение чистящей амплитуды, которая может быть отрегулирована до оптимальных уровней. Например, слишком низкая амплитуда чистки приводит к неудовлетворительной очистке зубов, а слишком высокая амплитуда может вызвать повреждение десны пользователя, чрезмерный звук от устройства или поломку устройства. Оптимальная амплитуда, однако, обеспечивает лучшую очистку зубов и приводит к минимальному энергопотреблению мощности. Кроме того, измерение отклонения и поворота также обеспечивает определение угла чистки относительно зубов.
[0007] В целом, в одном аспекте обеспечивается устройство для очистки полости рта. Устройство для очистки полости рта включает в себя: (i) участок корпуса; (ii) чистящую головку, продолжающуюся от участка корпуса, при этом по меньшей мере участок чистящей головки выполнен с возможностью перемещения относительно участка корпуса; (iii) контроллер; (iv) оптический датчик, расположенный относительно элемента чистящей головки и участка корпуса и в сообщении с контроллером, при этом оптический датчик выполнен с возможностью получения данных оптического датчика, полученных в результате отклонения или поворота элемента чистящей головки относительно участка корпуса; а контроллер выполнен с возможностью приема данных оптического датчика и определения отклонения или поворота элемента чистящей головки относительно участка корпуса.
[0008] Согласно варианту осуществления оптический датчик содержит источник света и световой датчик.
[0009] Согласно варианту осуществления оптический датчик содержит источник света, первый световой датчик, расположенный на одной стороне источника света, и второй световой датчик, расположенный на второй стороне источника света.
[0010] Согласно варианту осуществления оптический датчик содержит световой датчик, первый источник света, расположенный на одной стороне светового датчика, и второй источник света, расположенный на второй стороне светового датчика.
[0011] Согласно варианту осуществления оптический датчик содержит первый участок, расположенный на участке корпуса и содержащий источник света и световой датчик, и второй участок, расположенный на элементе чистящей головки и содержащий отражатель.
[0012] Согласно варианту осуществления устройство для полости рта дополнительно включает в себя импульсный генератор, выполненный с возможностью генерирования импульсной или модуляционной схемы для света, излученного источником света.
[0013] Согласно аспекту обеспечивается устройство для очистки полости рта. Устройство включает в себя: оптический датчик; и контроллер в сообщении с с оптическим датчиком, при этом контроллер выполнен с возможностью: (i) приема от оптического датчика информации датчика, содержащей информацию об отклонении и/или повороте чистящей головки устройства для очистки полости рта; и (ii) вычисления положения чистящей головки относительно корпуса щетки на основании информации об отклонении и/или повороте чистящей головки.
[0014] Согласно варианту осуществления контроллер дополнительно выполнен с возможностью оценивания, используя множество вычисленных положений чистящей головки, сеанса чистки.
[0015] Согласно аспекту обеспечивается способ определения положения чистящей головки устройства для очистки полости рта. Способ включает в себя этапы, на которых: обеспечивают устройство для очистки полости рта, содержащее оптический датчик, участок корпуса, чистящую головку и контроллер; определяют, посредством оптического датчика, информацию датчика, содержащую информацию об отклонении и/или повороте чистящей головки; и вычисляют, посредством контроллера, положение чистящей головки относительно корпуса щетки на основании информации об отклонении и/или повороте чистящей головки.
[0016] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором определяют, из вычисленного положения чистящей головки относительно корпуса щетки, усилие, действующее на чистящую головку.
[0017] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором определяют, из вычисленного положения чистящей головки относительно корпуса щетки, угол чистящей головки.
[0018] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором оценивают, используя множество вычисленных положений чистящей головки, измерение эффективности сеанса чистки.
[0019] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором используют вычисленную усилие, действующее на чистящую головку или посредством чистящей головки, для управления амплитудой движения чистящей головки устройством для очистки полости рта.
[0020] Следует принять во внимание, что все сочетания вышеупомянутых концепций и дополнительных концепций, рассмотренных более подробно ниже (при условии, что такие концепции не являются взаимоисключающими) рассматриваются как часть предмета изобретения, раскрытого в настоящем документе. В частности, все сочетания заявленного предмета изобретения, приведенные в конце настоящего раскрытия, рассматриваются как часть предмета изобретения, раскрытого в настоящем документе.
[0021] Эти и другие аспекты изобретения станут очевидны из и объяснены со ссылкой на вариант(ы) осуществления, описанные здесь и далее.
Краткое описание чертежей
[0022] На чертежах подобные номера ссылочных позиций относятся в целом к одним и тем же частям на различных изображениях. Также, чертежи необязательно выполнены в масштабе, вместо этого упор сделан на иллюстрирование принципов изобретения.
[0023] Фиг. 1 - изображение устройства для очистки полости рта согласно варианту осуществления.
[0024] Фиг. 2A - схематическое изображение оптического датчика согласно варианту осуществления.
[0025] Фиг. 2B - схематическое изображение оптического датчика согласно варианту осуществления.
[0026] Фиг. 3 - схематическое изображение оптического датчика согласно варианту осуществления.
[0027] Фиг. 4 - схематическое изображение поворота чистящей головки устройства для очистки полости рта согласно варианту осуществления.
[0028] Фиг. 5 - схематическое изображение системы управления устройства для очистки полости рта согласно варианту осуществления.
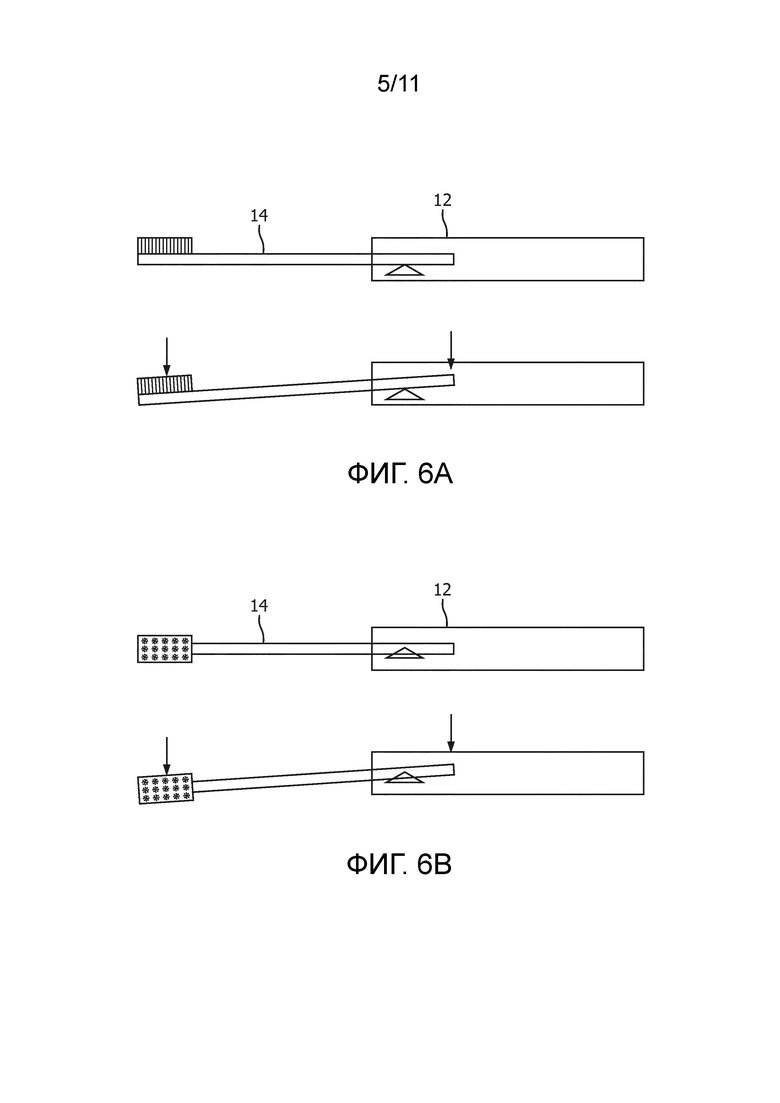
[0029] Фиг. 6A - схематическое изображение нормального отклонения устройства для очистки полости рта согласно варианту осуществления.
[0030] Фиг. 6B - схематическое изображение бокового отклонения устройства для очистки полости рта согласно варианту осуществления.
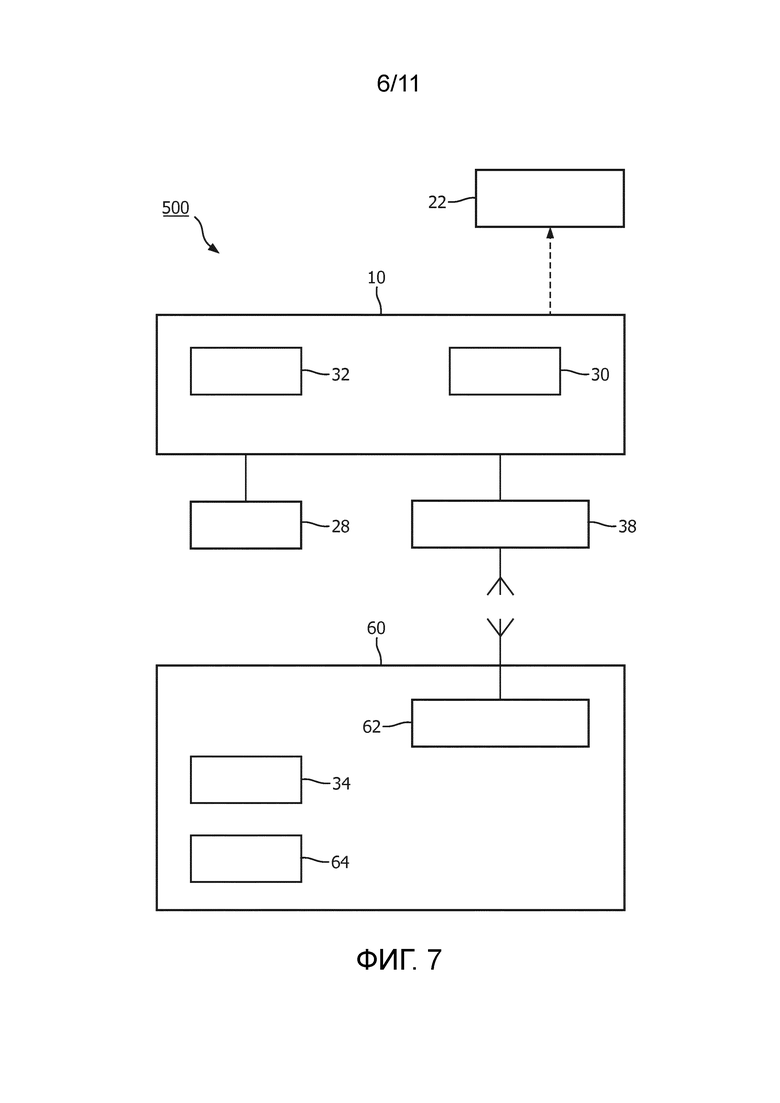
[0031] Фиг. 7 - схематическое изображение системы управления устройства для очистки полости рта согласно варианту осуществления.
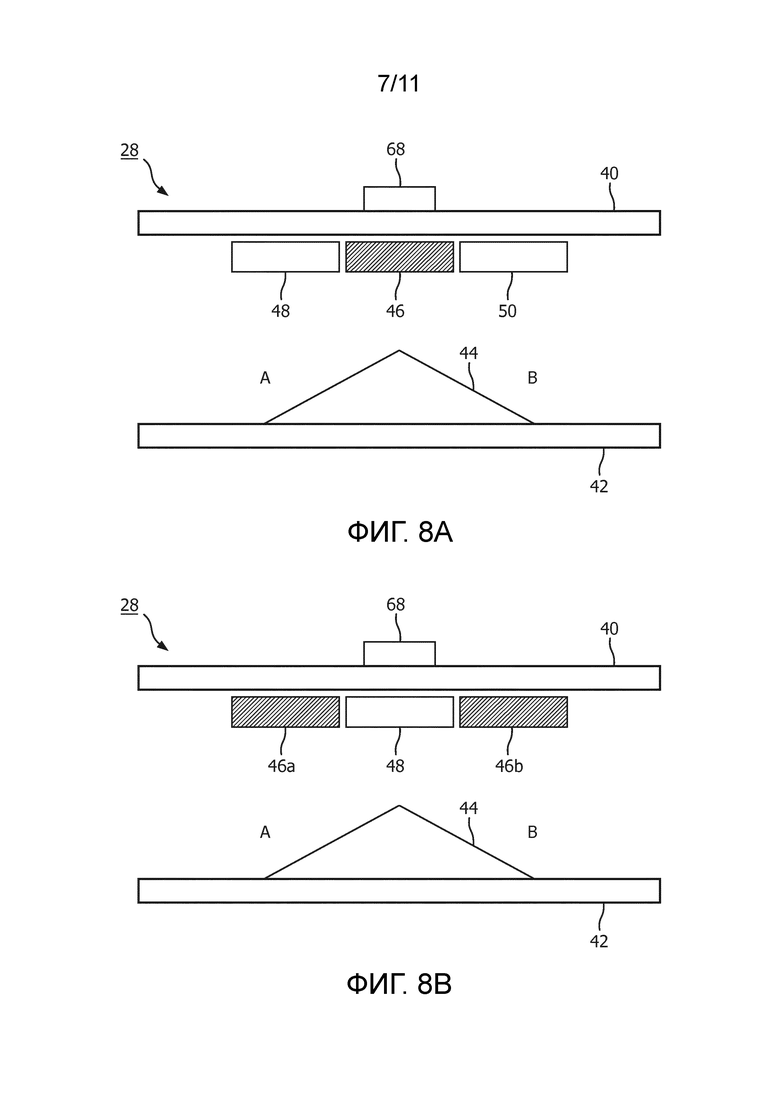
[0032] Фиг. 8A - схематическое изображение оптического датчика согласно варианту осуществления.
[0033] Фиг. 8B -схематическое изображение оптического датчика согласно варианту осуществления.
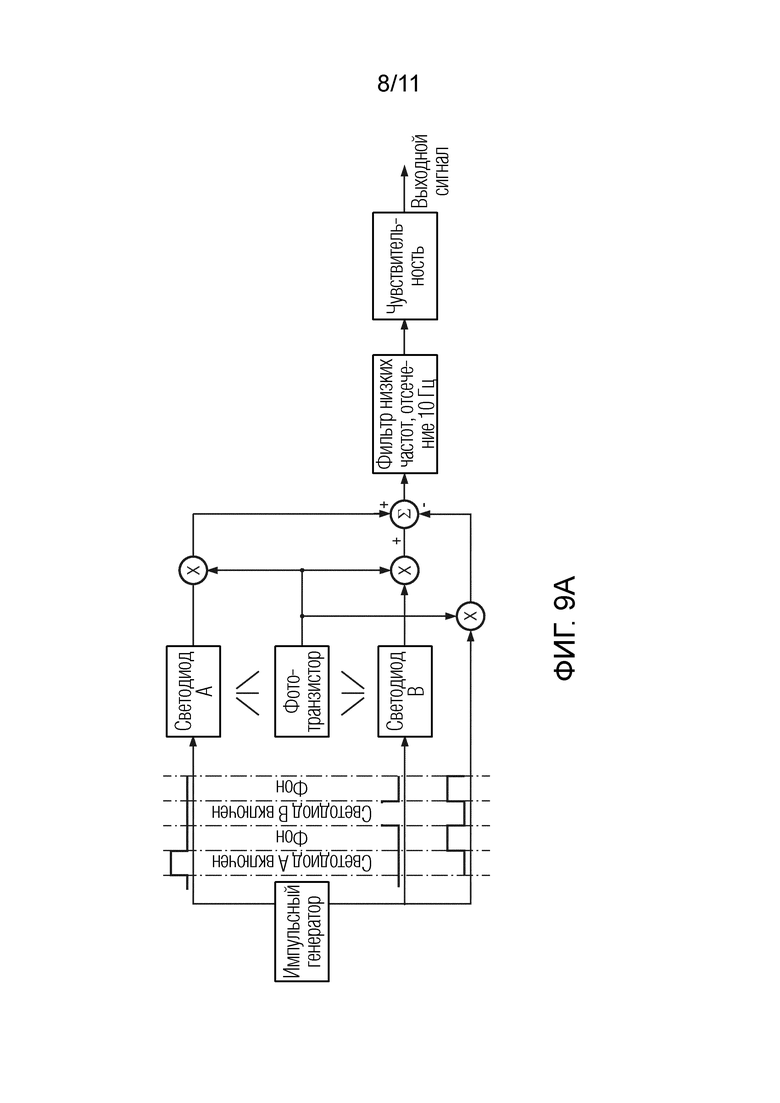
[0034] Фиг. 9A - схематическое изображение системы для генерирования, обнаружения и анализа импульсов согласно варианту осуществления.
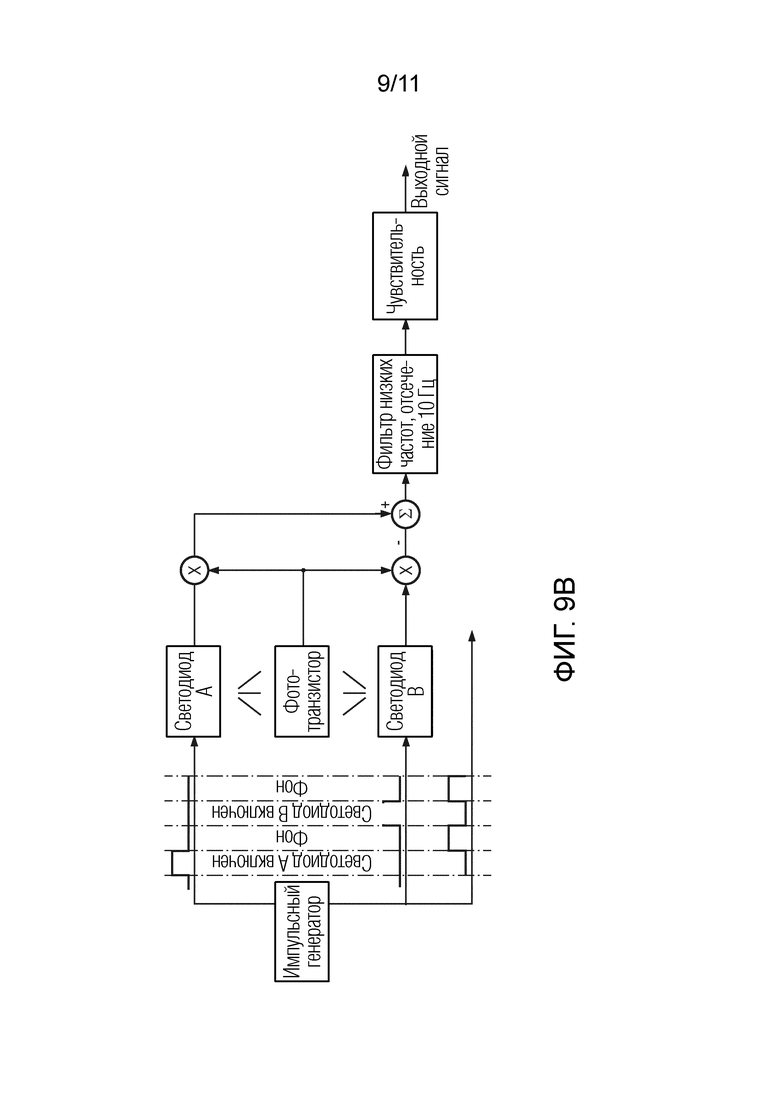
[0035] Фиг. 9B - схематическое изображение системы для генерирования, обнаружения и анализа импульсов согласно варианту осуществления.
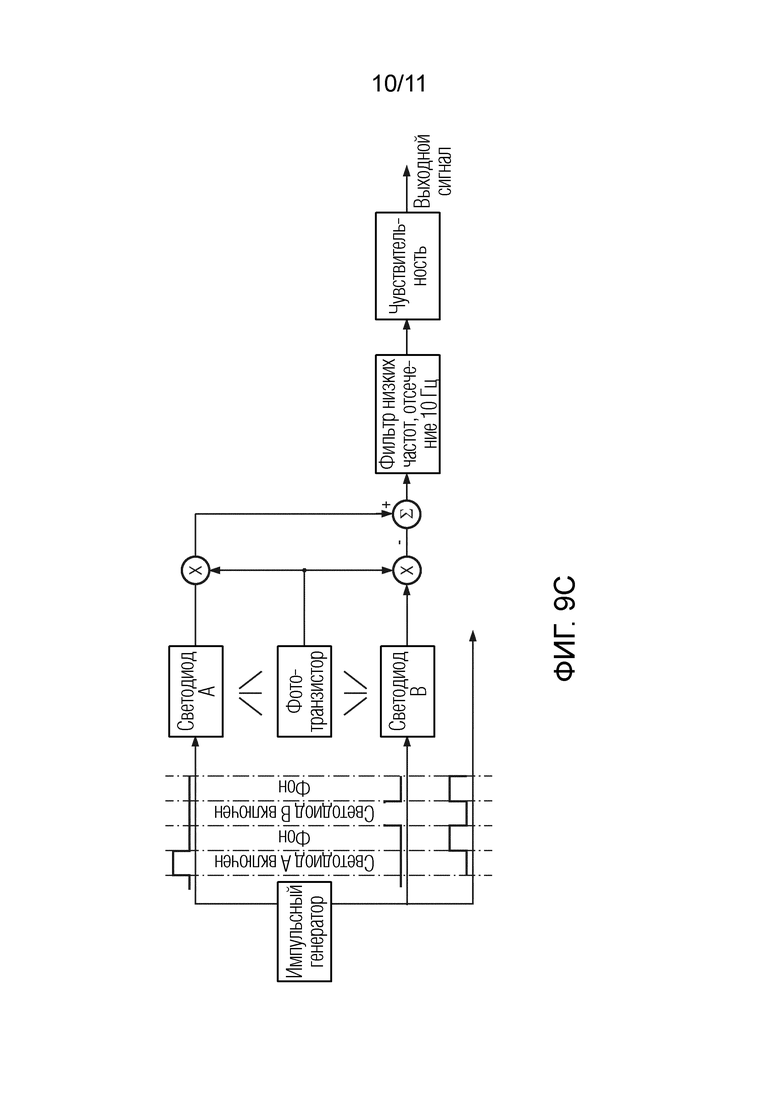
[0036] Фиг. 9C - схематическое изображение системы для генерирования, обнаружения и анализа импульсов согласно варианту осуществления.
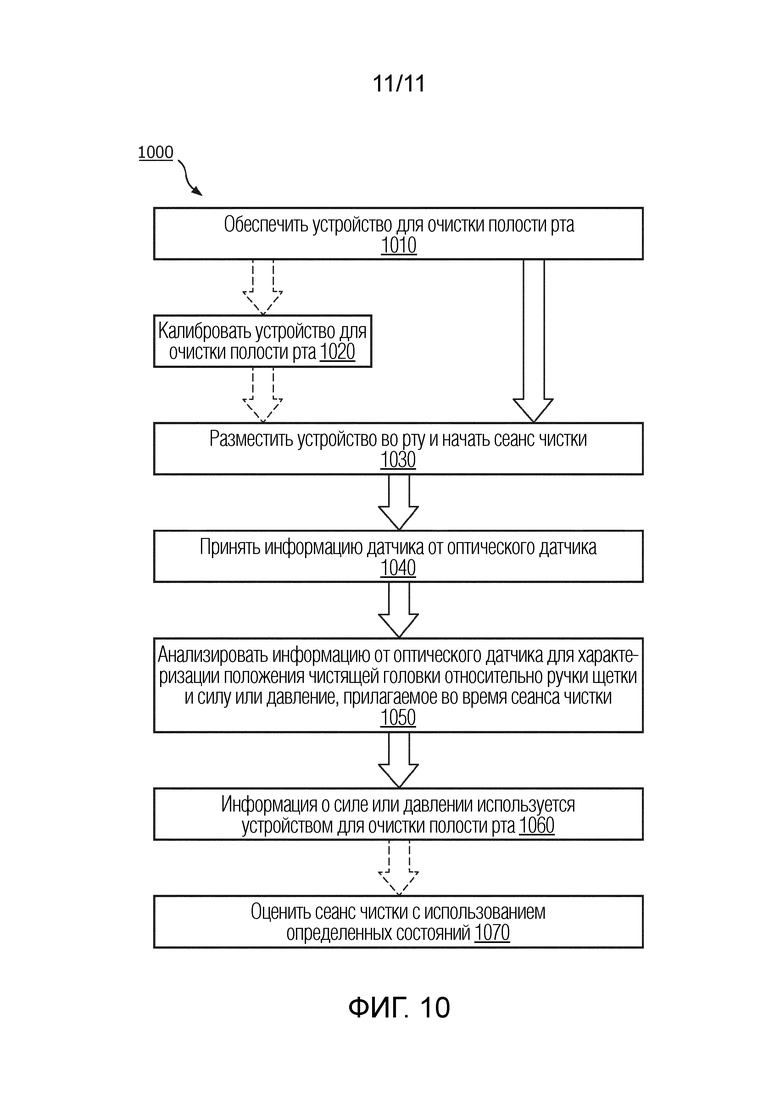
[0037] Фиг. 10 - блок-схема, изображающая способ для обнаружения отклонения и поворота чистящей головки посредством оптического датчика согласно варианту осуществления.
Подробное описание вариантов осуществления изобретения
[0038] Настоящее раскрытие описывает различные варианты осуществления способа и системы для измерения отклонения и поворота участка устройства для очистки полости рта, с использованием оптического датчика. В более общем смысле, заявитель обнаружил и принял во внимание, что было бы выгодно обеспечить систему для измерения отклонения и поворота участка щетки для определения усилий, приложенных щетинистой головкой к зубам и деснам. Соответственно, способы, описанные или иным образом предусмотренные в настоящем документе, обеспечивают устройство для очистки полости рта, выполненное с возможностью определения отклонения и поворота участка щетки. Согласно варианту осуществления способ использует оптический датчик для измерения отклонения и поворота участка щетки во время сеанса чистки.
[0039] Конкретная цель использования вариантов осуществления и воплощений в настоящем документе состоит в определения усилий с использованием устройства для очистки полости рта, например, такого как зубная щетка Philips Sonicare (производимая компанией Koninklijke Philips Electronics, N.V.).
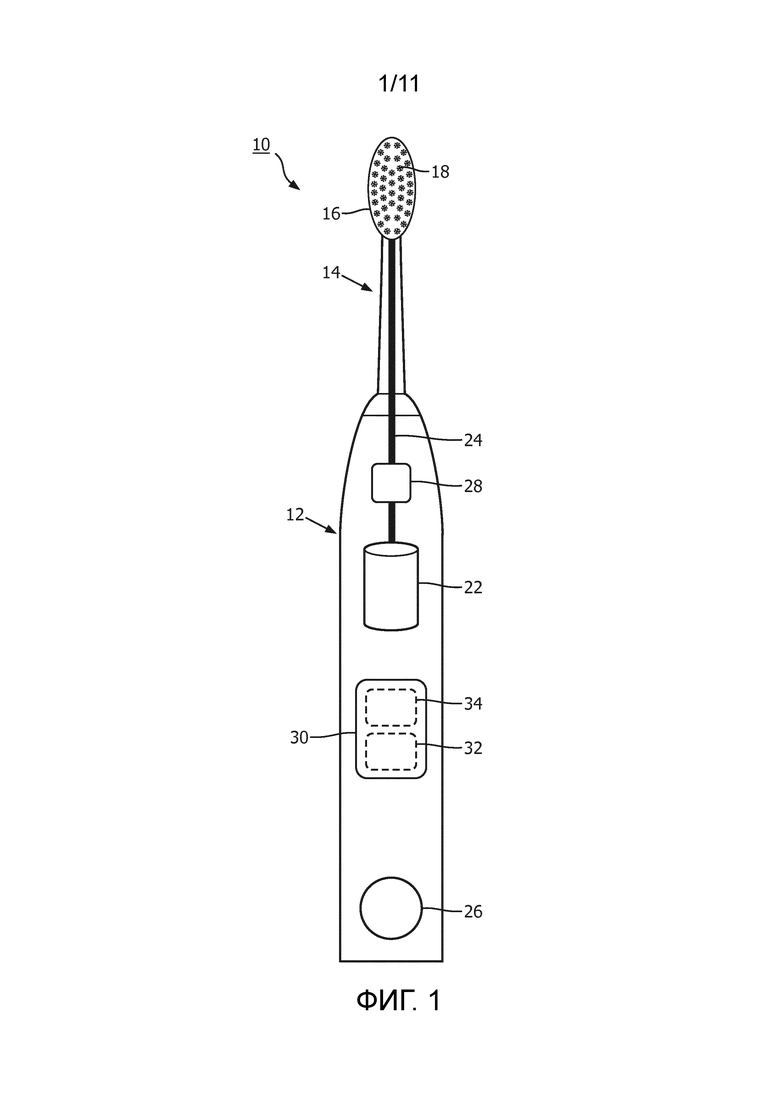
[0040] На фиг. 1, в одном варианте осуществления, обеспечивается устройство 10 для очистки полости рта, включающее в себя участок 12 корпуса и элемент 14 чистящей головки, установленный на участок корпуса. Элемент 14 чистящей головки включает в себя на своем удаленном от участка корпуса конце чистящую головку 16. Чистящая головка 16 включает в себя щетинистую поверхность 18, обеспечивающую множество щетинок. Согласно варианту осуществления щетинки проходят вдоль оси, по существу перпендикулярной продольной оси головки, хотя возможно множество других вариантов осуществления чистящей головки и щетинок.
[0041] Согласно варианту осуществления элемент 14 головки, чистящая головка 16 и/или щетинистая поверхность 18 установлены так, чтобы было возможно обеспечить перемещение относительно участка 12 корпуса. Перемещение может представлять собой любое из множества различных перемещений, включающих в себя, помимо прочих, вибрации или поворот. Согласно варианту осуществления элемент 14 головки устанавливается на корпус так, чтобы было возможно обеспечить вибрацию относительно участка 12 корпуса, или, в качестве другого примера, чистящая головка 16 устанавливается на элемент 14 головки так, чтобы было возможно обеспечить вибрацию относительно участка 12 корпуса. Например, согласно варианту осуществления, щетинки вибрируют с первой частотой, равной или больше приблизительно 250 Гц, однако, возможно множество других частот, схем и вибраций. Элемент 14 головки может быть неподвижно установлен на участке 12 корпуса или он может, альтернативно, устанавливаться с возможностью снятия так, что элемент 14 головки может заменяться на новый, когда щетинки или другой компонент устройства износились и требуют замены.
[0042] Согласно варианту осуществления участок 12 корпуса включает в себя приводной механизм 22 для генерирования перемещения, и передающий компонент 24 для передачи генерированных перемещений элементу 14 чистящей головки. Например, приводной механизм 22 может содержать двигатель или электромагнит(ы), который генерирует перемещение передающего компонента 24, которое в дальнейшем передается элементу 14 чистящей головки. Приводной механизм 22 может включать в себя компоненты, например, помимо прочих, источник питания, генератор колебаний и один или более электромагнитов. В этом варианте осуществления источник питания содержит одну или более перезаряжаемых батарей, не представлены, которые могут, например, электрически заряжаться в зарядном держателе, в котором размещается устройство 10 для очистки полости рта, когда оно не используется.
[0043] Хотя в настоящем варианте осуществления устройство 10 для очистки полости рта представляет собой электрическую зубную щетку, следует понимать, что в альтернативном варианте осуществления устройство для очистки полости рта представляет собой ручную зубную щетку (не представлено). В такой конструкции ручная зубная щетка имеет электрические компоненты, но чистящая головка не приводится в действие механически электрическим компонентом.
[0044] Участок 12 корпуса дополнительно обеспечен пользовательским вводом 26 для включения и выключения генератора 22 перемещения. Пользовательский ввод 26 позволяет пользователю управлять зубной щеткой 20, например, включать или выключать зубную щетку 20. Пользовательский ввод 26 может, например, представлять собой кнопку, сенсорный экран или переключатель.
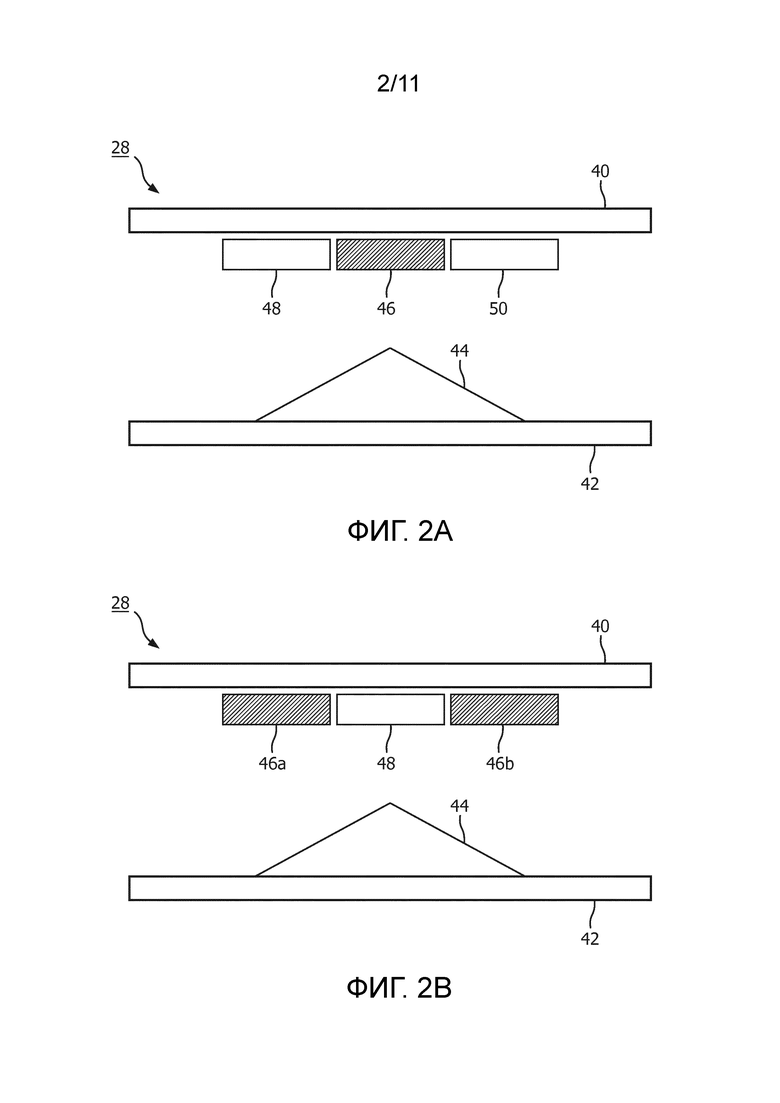
[0045] Согласно варианту осуществления устройство 10 для очистки полости рта включает в себя датчик 28 давления. Датчик 28 давления представлен на фиг. 1 внутри участка 12 корпуса, но может располагаться в любом месте внутри устройства, включая, например, расположение внутри элемента 14 чистящей головки или чистящей головки 16. Датчик 28 давления содержит, например, оптический датчик. Согласно варианту осуществления, изображенному на фиг. 2A, оптический датчик содержит первый участок 40, жестко фиксированный к зубной щетке, установленный на нее или являющийся ее частью. Первый участок содержит источник 46 света и два световых датчика 48 и 50, которые могут быть расположены на расстоянии от источника 46 света или встроенными в источник 46 света. Оптический датчик также содержит второй участок 42, который установлен на гибком участке, например, передающем компоненте 24, для передачи генерированных перемещений элементу 14 чистящей головки, или на гибком участке в элементе 14 чистящей головки, или на элементе 14 чистящей головки. Второй участок содержит отражатель 44. Согласно варианту осуществления, изображенному на фиг. 2B, первый участок содержит два источника 46a и 46b света, и световой датчик 48, который может быть отдельным от одного или более из двух источников 46a и 46b света, или встроен в них. В случае, когда датчик 28 содержит источник света и два световых датчика, световые датчики могут располагаться, например, рядом, напротив, или и рядом и напротив источника света. В случае, когда датчик 28 содержит два источника света и световой датчик, источники света могут располагаться, например, рядом, напротив или и рядом и напротив светового датчика. Возможна любая конфигурация источников света и световых датчиков.
[0046] Согласно другому варианту осуществления оптический датчик содержит по меньшей мере один источник 46 света и по меньшей мере один световой датчик 48. Этот вариант осуществления оптического датчика также включает в себя световую заслонку, расположенную по меньшей мере частично между источником света и световым датчиком, так что усилие, действующее на щетку, вызывает перемещение по меньшей мере одного из источника света, светового датчика и/или световой заслонки. Это перемещение изменяет величину света, принимаемого световым датчиком, что может использоваться для вычисления или оценки усилия, как описано в другом месте в настоящем документе. Например, помимо множества других возможностей, оптический датчик 28 может быть сконструирован так, что перемещение щетки в первом направлении перемещает световую заслонку из первого положения в по меньшей мере частично не заслоняющее положение, а перемещение во втором направлении перемещает световую заслонку из первого положения в по меньшей мере частично заслоняющее положение, Согласно другому варианту осуществления оптический датчик 28 может быть выполнен так, что перемещение щетки в первом направлении перемещает источник света относительно светового датчика и световой заслонки. Согласно еще одному варианту осуществления оптический датчик 28 может быть выполнен так, что перемещение щетки в первом направлении перемещает световой датчик относительно источника света и световой заслонки.
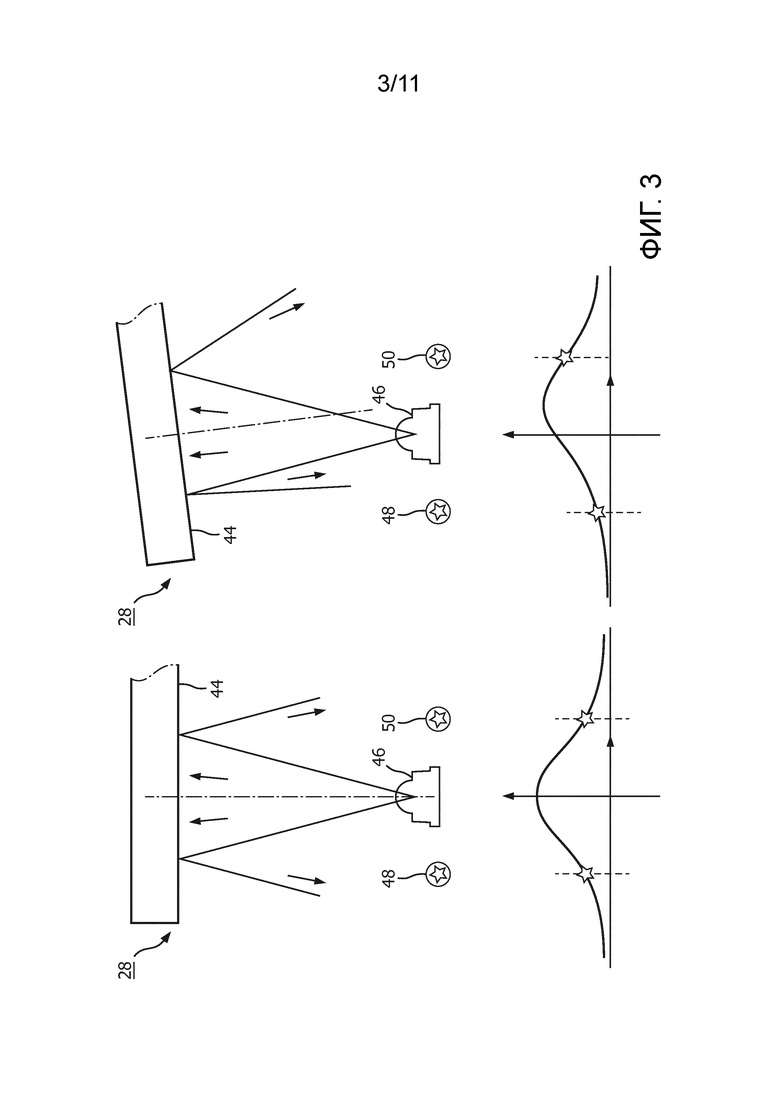
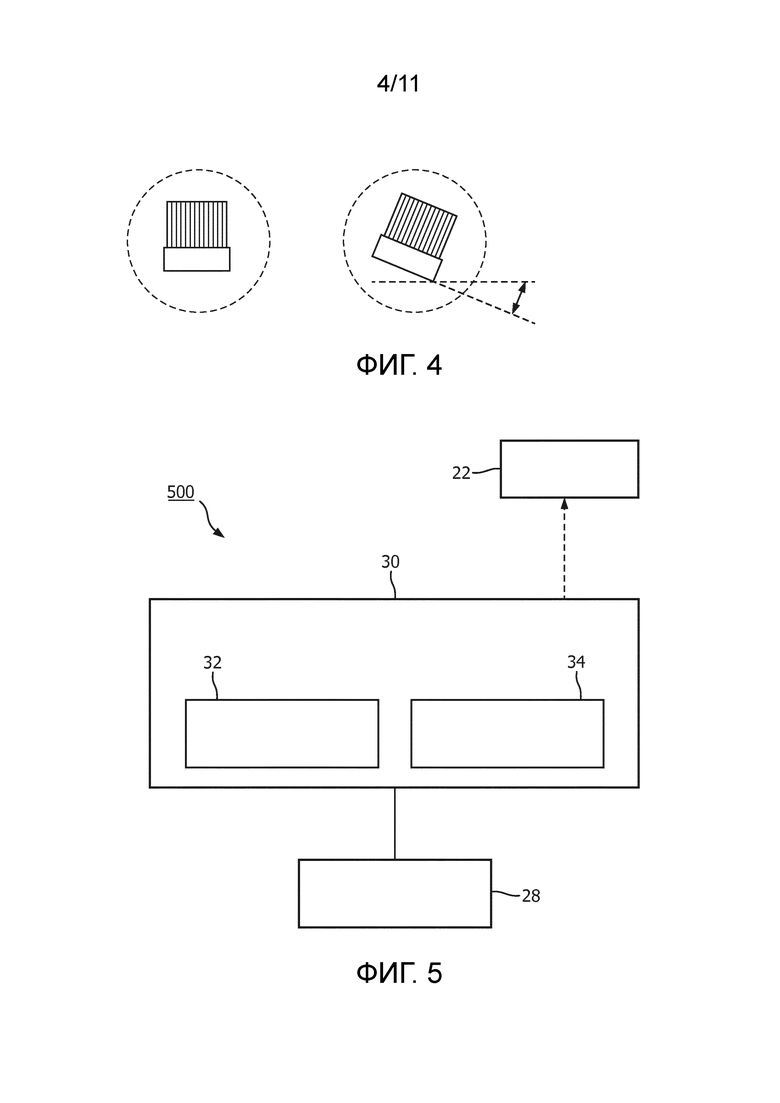
[0047] На фиг. 3, в одном варианте осуществления, представлено схематическое изображение одного способа работы оптического датчика 28. Согласно варианту осуществления источник 46 света оптического датчика может представлять собой, например, один или более светодиодов или других источников света. Источник 46 света выполнен с возможностью излучать свет, который отражается от отражателя 44, и обнаруживается одним или более из детекторов 48 и 50. Согласно варианту осуществления, когда гибкий участок зубной щетки перемещается благодаря вибрации чистящей головки или чистящим усилиям, исходящим от пользователя и сеанса чистки, положение отражателя изменяется. Справа на фиг. 3, например, отражатель повернут благодаря усилиям, действующим на гибкий участок. Поворот чистящей головки также изображен на фиг. 4. Перемещение чистящей головки и, таким образом, отражателя вызывает изменение интенсивности света, обнаруживаемое световыми датчиками 48 и 50, и/или вызывает изменение характера отражения, обнаруживаемое световыми датчиками 48 и 50. Например, ориентация и положение отражателя 44 может модулировать схему отраженного света, которая может обнаруживаться и анализироваться, как описано в настоящем документе. В варианте осуществления, в котором каждый из световых датчиков 48 и 50 расположен на каждой стороне источника 46 света, дифференциальное измерение позволяет сравнение левого и правого распределения света.
[0048] Согласно варианту осуществления информация, генерированная оптическим датчиком 28, например, данные, полученные одним или более световыми датчиками 48, предоставляются контроллеру 30. Контроллер 30 может содержать процессор 32 и память 34. Процессор 32 может принимать любой подходящий вид. Например, процессор 32 может представлять собой или включать в себя микроконтроллер, множество микроконтроллеров, схему, единственный процессор или множество процессоров. Контроллер 30 может быть образован из одного или множества модулей, и выполнен с возможностью управления устройством 10 для очистки полости рта в ответ на ввод, например, пользовательский ввод 26. Например, контроллер 30 может быть выполнен с возможностью приведения в действие блока управления двигателем. Согласно варианту осуществления оптический датчик 28 объединен с контроллером 30.
[0049] Память 34 может принимать любой подходящий вид, включая в себя энергонезависимую память и/или RAM. Энергонезависимая память может включать в себя постоянное запоминающее устройство (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, помимо прочего, операционную систему. RAM используется процессором для временного хранения данных. Операционная система может содержать код, который, при исполнении контроллером 30, управляет работой каждого из аппаратных компонентов устройства 10 для очистки полости рта.
[0050] На фиг. 5 обеспечивается вариант осуществления системы 500 для очистки полости рта. Согласно варианту осуществления система 500 для очистки полости рта включает в себя один или более оптических датчиков 28 и контроллер 30, содержащий процессор 32 и память 34. При использовании с электрическими очищающими устройствами система 200 для очистки полости рта включает в себя приводной механизм 22, работа которого управляется контроллером 30.
[0051] Согласно варианту осуществления контроллер 30 использует информацию от оптического датчика 28 для определения нормального отклонения, бокового отклонения и/или поворота чистящей головки относительно корпуса щетки. Нормальное отклонение чистящей головки, изображенное на фиг. 6A, представляет собой приложение усилия в направлении щетинок чистящей головки 16 на элемент 14 чистящей головки. Боковое отклонение чистящей головки относительно корпуса щетки, изображенное на фиг. 6B, представляет собой приложение усилия, перпендикулярного направлению щетинок чистящей головки 16, к элементу 14 чистящей головки. Поворот чистящей головки, изображенный на фиг. 4, представляет собой поворот чистящей головки 16 относительно корпуса 12 щетки. Согласно варианту осуществления контроллер 30 содержит компаратор или модуль компаратора, дифференциальный усилитель или модуль дифференциального усилителя, микропроцессор или справочную таблицу, которая используется для анализа информации от оптического датчика 28 для определения усилий, приложенных к чистящей головке, на основании нормального отклонения, бокового отклонения и/или поворота чистящей головки относительно корпуса щетки. Например, контроллер 30 может принимать информацию от оптического датчика - например, схему принятого отраженного света - и сравнивать ее с базой данных сохраненных схем отраженного света, которые могут определяться экспериментально и/или предварительно программироваться. В качестве другого примера контроллер 30 может принимать информацию от оптического датчика -например, схему интенсивности принятого отраженного света - и сравнивать ее с полученной ранее информацией от оптического датчика для определения изменения, соответствующего положению, отклонению, повороту и/или усилию чистящей головки относительно корпуса щетки. Устройство может использовать любой способ для перевода информации от светового датчика или световых датчиков в нормальное отклонение, боковое отклонение и/или поворот чистящей головки относительно корпуса щетки, или в усилие(я), приложенное пользователем.
[0052] На фиг. 7 представлен другой вариант осуществления системы 200 для очистки полости рта, содержащей устройство 10 для очистки полости рта и устройство 60, отдельное от устройства для очистки полости рта. Устройство 10 для очистки полости рта может представлять собой любой из вариантов осуществления устройства для очистки полости рта, раскрытых или иным образом предусмотренных в настоящем документе. Согласно варианту осуществления устройство 10 для очистки полости рта включает в себя один или более оптических датчиков 28 для информации о давлении, и контроллер 30, содержащий процессор 32. При использовании с электрическими очищающими устройствами устройство 10 для очистки полости рта включает в себя приводной механизм 22, работа которого управляется контроллером 30.
[0053] Согласно варианту осуществления устройство 10 для очистки полости рта содержит модуль 38 связи, передающий собранную информацию датчика. Модуль связи может представлять собой любой модуль, устройство или средство, способное передавать проводной или беспроводной сигнал, включающий в себя, без ограничения, Wi-Fi, Bluetooth, связь в ближнем поле и/или сотовый модуль.
[0054] Согласно варианту осуществления устройство 60 может представлять собой любое устройство, выполненное с возможностью или способное принимать и обрабатывать информацию датчика давления, переданную от устройства 10 для очистки полости рта. Например, устройство 10 может представлять собой держатель или станцию очищающего устройства, смартфон, компьютер, сервер или любое другое компьютеризированное устройство. Согласно варианту осуществления устройство 60 включает в себя модуль 62 связи, который может представлять собой любой модуль, устройство или средство, способное принимать проводной или беспроводной сигнал, в том числе, без ограничения, Wi-Fi, Bluetooth, связь в ближнем поле и/или сотовый модуль. Устройство 60 также включает в себя процессор 64, использующий принятую от оптического датчика 28 информацию светового датчика для измерения усилий, приложенных пользователем, на основании обнаруженного и/или вычисленного отклонения и/или поворота чистящей головки относительно корпуса щетки. Согласно одному варианту осуществления устройство 60 может включать в себя память 34 для хранения калибровочных данных, принятой информации оптического датчика или любой другой информации.
[0055] В качестве одного примера устройство 10 для очистки полости рта может собирать информацию датчика, используя оптический датчик 28, и передавать эту информацию локально посредством Bluetooth-соединения на смартфон 60, при этом информация датчика обрабатывается и/или сохраняется. В качестве другого примера устройство 10 для очистки полости рта может собирать информацию датчика, используя оптический датчик 28, и передавать эту информацию через Wi-Fi-соединение в Интернет, где она передается удаленному серверному устройству 60. Удаленное серверное устройство 60 обрабатывает и/или сохраняет информацию датчика. Пользователь может получить доступ к этой информации непосредственно или может принимать сообщения, обновления или другую информацию от удаленного серверного устройства 60 или связанного устройства.
[0056] На фиг. 8A, в одном варианте осуществления, представлена конфигурация оптического датчика 28, имеющего сторону A и сторону B. Согласно этой конфигурации интенсивность и распределение света, излученного источником 46 света, при обнаружении световыми датчиками 48 и 50 изменяются в зависимости от расположения или местоположения - включая в себя отклонение или поворот - чистящей головки, на которой установлен, закреплен или прикреплен иным образом отражатель 44. Посредством измерения этих изменений интенсивности и распределения света может быть реконструировано расположение или местоположение отражателя или чистящей головки, и, таким образом, может быть оценено усилие, которое пользователь эффективно прикладывает к чистящей головке и/или к зубам или деснам посредством чистящей головки.
[0057] Согласно варианту осуществления, в котором используется отраженный свет, могут быть реконструированы по меньшей мере три степени свободы отражателя и/или чистящей головки. Например, для обнаружения нормального отклонения добавление отраженного света на стороны A и B (например, A+B) пропорционально близости отражателя к световым датчикам 48 и 50. Другими словами, когда прикладывается усилие и отражатель 44 приближается к источнику 46 света и световым датчикам 48 и 50, интенсивность обнаруженного света выше. Когда усилие не прикладывается или прикладывается в меньшем количестве, отражатель 44 отдаляется от источника 46 света и световых датчиков 48 и 50, и интенсивность обнаруженного света становится ниже.
[0058] Для обнаружения бокового отклонения разность в отраженном свете на сторонах A и B (например, A-B или B-A) пропорциональны боковому смещению отражателя 44. Таким образом, когда отражатель 44 перемещается в направлении стороны A из-за бокового смещения, интенсивность света, обнаруженного датчиком 48, будет выше интенсивности света, обнаруженного датчиком 50. Когда отражатель 44 перемещается в направлении стороны B из-за бокового смещения, интенсивность света, обнаруженного датчиком 50, будет выше интенсивности света, обнаруженного датчиком 48.
[0059] При обнаружении поворота разность в отраженном свете на сторонах A и B (например, A-B или B-A) пропорциональна повороту отражателя 44. Однако в некоторых вариантах осуществления оба - и боковое смещение и поворот - пропорциональны сигналу A-B или B-A. Согласно одному варианту осуществления боковое смещение и поворот могут быть разделены по их частотному составу. Например, низкочастотная (например,<10 Гц) компонента сигнала (A-B) пропорциональна боковому смещению, а высокочастотная (например,>200 Гц) компонента сигнала (A-B) пропорциональна повороту.
[0060] Согласно другому варианту осуществления, как изображено на фиг. 8B, оптический датчик содержит два источника 46a и 46b света, по одному на каждой стороне светового датчика 48. В этом варианте осуществления источник 46а и 46b света испускают импульсы высокой частоты (например, >1kГц), и световой датчик 48 измеряет чередующийся отраженный свет от A и отраженный свет от B. Этот вариант осуществления может, например, уменьшать себестоимость датчика. Согласно варианту осуществления импульсный генератор 68 создает три различных сигнала: (i) импульсный сигнал для источника 46a света на стороне A; (ii) импульсный сигнал для источника 46b света на стороне B; и (iii) импульсный сигнал для фонового измерения.
[0061] На фиг. 9A в одном варианте осуществления представлена схема, иллюстрирующая измерение нормального смещения, с использованием варианта осуществления, изображенного на фиг. 8B. Соответственно этому варианту осуществления световой датчик 48 измеряет отраженный свет непрерывно. Измеренный выходной сигнал от светового датчика перемножается с сигналом возбуждения, приводя к образованию трех различных сигналов (A, B и фонового). Затем сигналы A и B суммируются, а фоновый сигнал вычитается. Это приводит к получению суммарного сигнала отраженного света (A+B), пропорционального нормальному положению отражающей цели. Согласно варианту осуществления для снижения шума в сигнале и для снижения эффекта высокочастотного поворота гибкого механизма сигнал A+B может быть пропущен через фильтр низких частот (с использованием, например, отсекающей частоты 10 Гц) и преобразован в сигналы посредством коэффициента чувствительности или справочной таблицы.
[0062] На фиг. 9B в одном варианте осуществления представлена схема, иллюстрирующая измерение бокового смещения, с использованием варианта осуществления, изображенного на фиг. 8B. Согласно этому варианту осуществления световой датчик 48 измеряет отраженный свет непрерывно. Измеренный выходной сигнал от светового датчика перемножается с сигналом возбуждения, приводя к образованию трех различных сигналов (A, B и фонового). Затем сигналы A и B вычитаются. В этом случае фоновый сигнал не требуется, поскольку A-B является дифференциальным измерением. Сигнал A-B пропорционален боковому смещению отражающей цели. Согласно варианту осуществления для снижения шума в сигнале и уменьшения эффекта высокочастотного поворота гибкого механизма сигнал A-B может быть пропущен через фильтр низких частот (с использованием, например, отсекающей частоты 10 Гц) и преобразован в сигнал усилия посредством коэффициента чувствительности или справочной таблицы. Согласно одному варианту осуществления система может нормировать сигнал (A-B) на (A+B), который уменьшает влияния нормального отклонения на измерение бокового отклонения.
[0063] На фиг. 9C в одном варианте осуществления представлена схема, иллюстрирующая измерение поворота с использованием варианта осуществления, изображенного на фиг. 8B. Согласно этому варианту осуществления световой датчик 48 измеряет отраженный свет непрерывно. Измеренный выходной сигнал от светового датчика перемножается с сигналом возбуждения, приводя к образованию трех различных сигналов (A, B и фонового). Затем сигналы A и B вычитаются. В этом случае фоновый сигнал не требуется, поскольку A-B является дифференциальным измерением. Сигнал A-B пропорционален боковому смещению отражающей цели. Для различения бокового смещения цели и поворота сигнал A-B пропускают через полосовой фильтр (полосу пропускания, обычно 50-500 Гц) для отфильтровывания низкочастотного бокового смещения и высокочастотной импульсной частоты. Затем отфильрованный сигнал преобразуется в сигнал поворота посредством коэффициента чувствительности или справочной таблицы. Согласно одному варианту осуществления система может нормировать сигнал (A-B) на (A+B), что снижает влияние нормального отклонения на измерение бокового отклонения.
[0064] Кроме описанных выше вариантов осуществления в настоящем документе возможны и представлены многие другие варианты осуществления. Например, хотя описаны варианты осуществления, в которых имеется один источник света и два световых датчика, и варианты осуществления, в которых имеется два источника света и один световой датчик, может использоваться любое сочетание источника света и светового датчика. Например, система может содержать третий источник света и/или третий световой датчик для дополнительного уменьшения взаимного влияния различных смещений или поворотов. В качестве еще одного варианта осуществления может быть оптимизирована точная форма отражающей поверхности для увеличения коэффициента отражения и уменьшения взаимного влияния различных направлений. Согласно другому варианту осуществления анализ и/или обработка данных, требующаяся для определения положения чистящей головки, может быть частью самого оптического датчика или может быть частью процессора или контроллера, или устройства для очистки полости рта, или отдельного устройства, например, базовой станции или мобильного устройства.
[0065] На фиг. 10, в одном варианте осуществления, представлена блок-схема способа 1000 измерения отклонения и поворота чистящей головки относительно корпуса щетки устройства для очистки полости рта с использованием оптического датчика. На этапе 1010 способа обеспечивается устройство 10 для очистки полости рта. Устройство для очистки полости рта может представлять собой любой из вариантов осуществления, описанных или иным образом предусмотренных в настоящем документе. Например, согласно одному варианту осуществления устройство 10 для очистки полости рта включает в себя участок 12 корпуса, элемент 14 чистящей головки, имеющий щетинистую поверхность 18, оптический датчик 28 и контроллер 30 с процессором 32 и памятью 34. Также возможны многие другие варианты осуществления устройства 10 для очистки полости рта.
[0066] На необязательном этапе 1020 способа система 500 может подвергаться калибровке. Калибровка может содержать, например, определение связи интенсивности света и/или со схемами и усилиями, воздействующими на щетку или чистящую головку, которая может быть сделана при изготовлении или пользователем. Во время калибровки, например, усилие может воздействовать на щетку и моментальные данные датчика комментируются и сохраняются. Согласно варианту осуществления этап калибровки опускается. Вместо этого устройство для очистки полости рта обрабатывает набор калибровочных данных ха один или более сеансов чистки посредством сравнения этих сеансов. Также может использоваться способ самообучения для дополнения, улучшения или иного регулирования заводской или пользовательской калибровки.
[0067] На этапе 1030 способа устройство для очистки полости рта размещается в полости рта в первом положении, и пользователь начинает чистить зубы. Во время сеанса чистки усилия отклонения и поворота воздействуют на чистящую головку, что может обнаруживаться и характеризоваться устройством.
[0068] На этапе 1040 способа источник(и) 46 света излучают свет, который может быть импульсным или испускаемым с определенной закономерностью согласно вариантам осуществления, описанным или иным образом предусмотренным в настоящем документе, и световой датчик 48 или световые датчики 48 и 50 обнаруживают излученный свет. Обычно оптический датчик собирает данные в течение всего сеанса чистки. Однако в некоторых вариантах осуществления оптический датчик может собирать данные только периодически, или данные от оптического датчика могут быть получены только посредством контроллера или другого компонента периодически. Соответственно, интенсивность замеров или частота оптического датчика может в значительной мере различаться. Когда пользователь оказывает давление на устройство для очистки полости рта, чистящая головка перемещается в одном или более направлениях, и интенсивность света и/или закономерность излучения света, обнаруженные световым датчиком(-ами) различна. Как описано или иным образом предусмотрено в настоящем документе, изменяющаяся интенсивность света и/или закономерность излучения света может анализироваться для определения отклонения и поворота чистящей головки относительно ручки щетки.
[0069] На этапе 1050 контроллер или процессор принимает данные от светового датчика и интерпретирует данные для определения отклонения и поворота чистящей головки, и, таким образом, определения угла и давления чистки. Например, контроллер 30 может содержать компаратор или компараторный модуль, дифференциальный усилитель или модуль дифференциального усилителя, микропроцессор или справочную таблицу, которая используется для анализа информации от оптического датчика 28 для определения усилий, прилагаемых к чистящей головке, на основании нормального отклонения, бокового отклонения и/или поворота чистящей головки. Например, контроллер 30 может принимать информацию от оптического датчика - например, закономерность принятого отраженного света - и сравнивать ее с базой данных хранящихся закономерностей принятого отраженного света, которая может быть определена экспериментально и/или запрограммирована заранее. В качестве другого примера контроллер 30 может принимать информацию от оптического датчика - например, закономерность или интенсивность принятого отраженного света - и сравнивать ее с ранее принятой информацией от оптического датчика, для определения изменения, соответствующего положению, отклонению, повороту и/или усилию чистящей головки. Устройство может использовать любой способ для преобразования информации от светового датчика или световых датчиков в нормальное отклонение, боковое отклонение и/или поворот чистящей головки, или в усилие(я), приложенное пользователем.
[0070] Согласно варианту осуществления системы 500, изображенной на фиг. 7, например, данные от светового датчика могут быть переданы устройству 60, которое может представлять собой любое устройство, выполненное с возможностью или способное принимать и обрабатывать информацию датчика, переданную от устройства 10 для очистки полости рта. Контроллер или процессор устройства 60 может затем интерпретировать или анализировать данные для определения отклонения и поворота чистящей головки. В качестве еще одного варианта осуществления интерпретация данных датчика от оптического датчика может интерпретироваться или анализироваться устройством для очистки полости рта, и расшифровка или анализ могут быть переданы устройству 60.
[0071] Как только угол чистки и давление определены, устройство для очистки полости рта может использовать эту информацию для множества дальнейших применений, модификаций системы или других использований. Например, на этапе 1060 способа, на фиг. 10, устройство для очистки полости рта использует вычисленный угол чистки и давление для управления амплитудой колебания щетки посредством изменения тока, подаваемого на двигатель, таким образом не допуская повреждения десен пользователя. В качестве другого примера устройство для очистки полости рта может использовать информацию для управления скоростью или амплитудой чистки для получения оптимальной скорости или амплитуды, таким образом, минимизируя расход энергии аккумулятора и увеличивая до максимума эффективность чистки.
[0072] На необязательном этапе 1070 множество определенных углов и/или давлений чистки используется для оценки или измерения эффективности сеанса чистки. Согласно варианту осуществления система хранит информацию об углах и/или давлении чистки, полученных во время сеанса чистки, для создания или иным образом выполнения оценки, в настоящее время или в какой-либо момент в будущем. Согласно другому варианту осуществления система хранит информацию о множестве сеансов чистки для накопления информации во времени, включая улучшение времени, техники или другой характеристики чистки, а также отсутствие улучшений. Например, система может использовать оценочные показатели, которые сравниваются с оптимальными углами и/или давлениями чистки. Согласно варианту осуществления система может использовать множество показателей для оценки сеанса чистки многомерным образом. Согласно варианту осуществления оценка сеанса чистки может быть передана. Это может выполняться путем использования дисплея, который указывает, прикладывается ли слишком маленькое давление, прикладывается ли правильная величина давления или прикладывается слишком большое давление. Альтернативно дисплей может указывать, что угол чистки правильный или неправильный. Согласно варианту осуществления система может предоставлять данные в режиме реального времени пользователю или удаленной системе. Например, система может передавать данные в режиме реального времени на компьютер посредством проводного или беспроводного сетевого соединения. В качестве другого примера система может передавать сохраненные данные компьютеру посредством проводного или беспроводного сетевого соединения. Таким образом, система может передавать информацию о единичном сеансе чистки и/или множестве сеансов чистки непосредственно работнику здравоохранения, например, стоматологу или стоматологическому гигиенисту.
[0073] Все определения, приведенные и используемые в настоящем документе, следует понимать как имеющие приоритет над словарными определениями, определениями в документах, включенных посредством ссылки, и/или обычными значениями определяемых терминов.
[0074] Слово в единственном числе, при использовании в настоящем документе в описании и в формуле, следует понимать в значении «по меньшей мере один», если явно не указано иное.
[0075] Фразу «и/или(при использовании в настоящем документе, в описании и в формуле, следует понимать в значении «любой из двух или оба(элементов, соединенных таким образом, то есть, элементов, которые совместно присутствуют в некоторых случаях и раздельно присутствуют в других случаях. Множество элементов, перечисленных посредством слов «и/или», следует истолковывать таким же образом, то есть, «один или более(элементов, соединенных таким образом. Могут необязательно иметься другие элементы, отличные от элементов, явно указанных фразой «и/или», связанные или не связанные с явно указанными элементами.
[0076] При использовании в настоящем документе, в описании и в формуле «или(следует понимать в том же значении, что и «и/или», как определено выше. Например, при разделении элементов в списке, «или(или «и/или(следует истолковывать как включающие, то есть, как включение по меньшей мере одного, но также включение более, чем одного, из множества или списка элементов, и, необязательно, дополнительных не перечисленных предметов. Только термины, явно указывающие на противоположное, например, «только один из(или «строго один из(или, при использовании в формуле, «состоящий из(относятся к включению строго одного элемента из множества или списка элементов. В целом термин «или(при использовании в настоящем документе следует истолковывать в исключающем смысле (то есть «один или другой, но не оба») только в том случае, когда ему предшествуют термины исключения, например, «любой», «один из», «только один из(или «строго один из».
[0077] При использовании в настоящем документе, в описании и в формуле, фразу «по меньшей мере один(в отношении списка из одного или более элементов следует понимать в значении по меньшей мере один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающих в себя по меньшей мере один из каждого и всякого элемента, явно перечисленного в списке элементов, и не исключающих любых сочетаний элементов в списке элементов. Это определение также допускает, что могут дополнительно иметься элементы, отличные от элементов, явно указанных в списке элементов, к которым относится фраза «по меньшей мере один», независимо от того, имеют отношение эти элементы к явно указанным элементам или нет.
[0078] Следует также понимать, что, если явно не указано иное, в любых способах, заявленных в настоящем документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничивается порядком, в котором указанные этапы или действия способа изложены.
[0079] В формуле, а также в вышеприведенном описании, все переходные фразы, такие как «содержащий», «включающий в себя», «несущий», «имеющий», «содержащий», «вмещающий в себя», «заключающий в себя», «составленный из(и подобные должны пониматься как открытые, то есть означать включение в себя, но не ограничение. Только переходные фразы «состоящий из (и «состоящий исключительно из (являются соответственно закрытыми или полузакрытыми.
[0080] Хотя в настоящем документе описаны и проиллюстрированы некоторые варианты осуществления изобретения, специалистам в данной области техники легко представить себе множество других средств и/или конструкций для выполнения функции и/или получения результатов и/или одного или более преимуществ, описанных в настоящем документе, и каждое из таких изменений и/или модификаций считается находящимся в пределах объема вариантов осуществления изобретения, описанных в настоящем документе. В более широком виде, специалисты в данной области техники легко поймут, что все параметры, размеры, материалы и/или конфигурации, описанные в настоящем документе, приведены только в качестве примера, и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного применения или применений, для которых используются идеи изобретения. Специалисты в данной области техники поймут или смогут установить тривиальным опытным путем многие эквиваленты частных вариантов осуществления, описанных в настоящем документе. Поэтому должно быть понятно, что вышеприведенные варианты осуществления представлены исключительно для примера, и что в пределах объема приложенной формулы и ее эквивалентов варианты осуществления изобретения могут применяться иным образом, чем явно описано и заявлено. Варианты осуществления настоящего раскрытия направлены на каждый отдельный признак, систему, изделие, материалы, комплект и/или способ, описанный в настоящем документе. Кроме того, любое сочетание двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если только такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно несовместимыми, включено в объем настоящего раскрытия.
Предложено устройство (10) для очистки полости рта для определения положения чистящей головки устройства, включающее: участок (12) корпуса; чистящую головку (14), продолжающуюся от участка корпуса, при этом по меньшей мере участок чистящей головки выполнен с возможностью перемещения относительно участка корпуса; контроллер (30); оптический датчик (28), расположенный относительно элемента чистящей головки и участка корпуса и в сообщении с контроллером. Оптический датчик выполнен с возможностью получения данных оптического датчика, являющихся результатом отклонения или поворота элемента чистящей головки относительно участка корпуса. Оптический датчик содержит первый участок (40), расположенный на участке корпуса, и второй участок (42), расположенный на элементе чистящей головки и содержащий отражатель (44). При этом первый участок содержит источник (46) света, первый световой датчик (48), расположенный на одной стороне источника света, и второй световой датчик (50), расположенный на второй стороне источника света, или первый участок содержит световой датчик (48), первый источник (46a) света, распложенный на одной стороне светового датчика, и второй источник (46b) света, расположенный на второй стороне светового датчика. Контроллер выполнен с возможностью приема данных оптического датчика и определения отклонения или поворота элемента чистящей головки относительно участка корпуса. 2 н. и 5 з.п. ф-лы, 15 ил.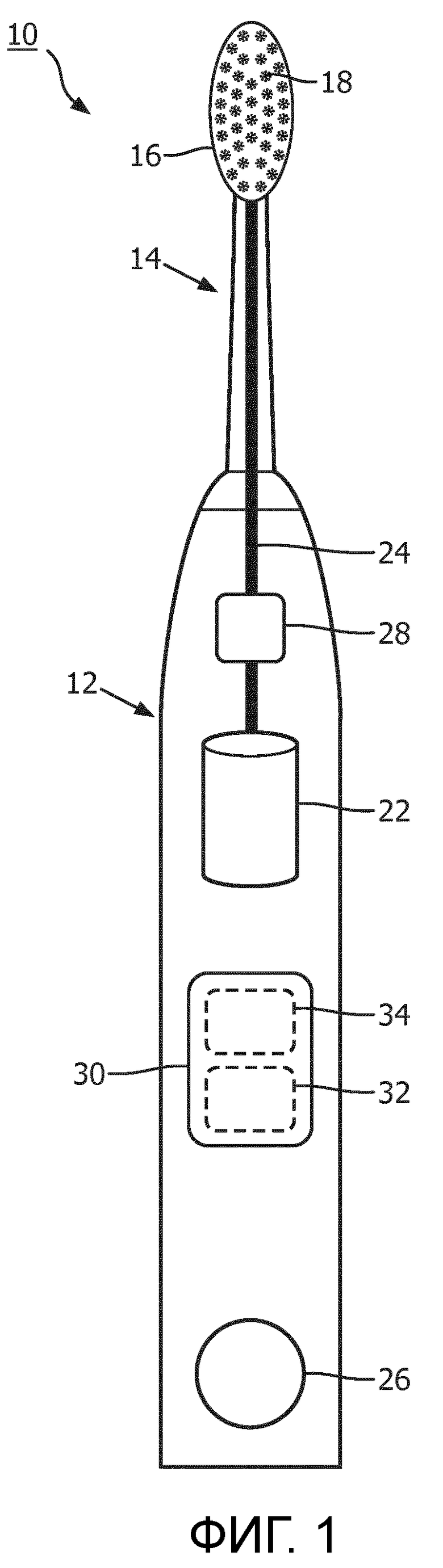
1. Устройство (10) для очистки полости рта, содержащее:
участок (12) корпуса;
элемент (14) чистящей головки, продолжающийся от участка корпуса, при этом по меньшей мере участок элемента чистящей головки выполнен с возможностью перемещения относительно участка корпуса;
контроллер (30);
оптический датчик (28), расположенный относительно элемента чистящей головки и участка корпуса и в сообщении с контроллером, при этом оптический датчик выполнен с возможностью получения данных оптического датчика, являющихся результатом отклонения или поворота элемента чистящей головки относительно участка корпуса;
при этом контроллер выполнен с возможностью приема данных оптического датчика и определения отклонения или поворота элемента чистящей головки относительно участка корпуса;
при этом оптический датчик содержит первый участок (40), расположенный на участке корпуса, и второй участок (42), расположенный на элементе чистящей головки и содержащий отражатель (44), и
(i) первый участок содержит источник (46) света, первый световой датчик (48), расположенный на одной стороне источника света, и второй световой датчик (50), расположенный на второй стороне источника света, или
(ii) первый участок содержит световой датчик (48), первый источник (46a) света, распложенный на одной стороне светового датчика, и второй источник (46b) света, расположенный на второй стороне светового датчика.
2. Устройство для очистки полости рта по п. 1, дополнительно содержащее импульсный генератор (68), выполненный с возможностью генерирования импульсной схемы или модуляционной схемы для света, излучаемого источником (46) света.
3. Способ (1000) определения положения элемента (14) чистящей головки устройства (10) для очистки полости рта, содержащий этапы, на которых:
обеспечивают (1010) устройство для очистки полости рта, содержащее оптический датчик (28), участок (12) корпуса, элемент (14) чистящей головки и контроллер (30), при этом оптический датчик содержит первый участок (40), расположенный на участке корпуса, и второй участок (42), расположенный на элементе чистящей головки и содержащий отражатель (44), и (i) первый участок содержит источник (46) света, первый световой датчик (48), расположенный на одной стороне источника света, и второй световой датчик (50), расположенный на второй стороне источника света, или (ii) первый участок содержит световой датчик (48), первый источник (46a) света, расположенный на одной стороне светового датчика, и второй источник (46b) света, расположенный на второй стороне светового датчика;
определяют (1040) посредством оптического датчика информацию датчика, содержащую информацию об отклонении и/или повороте элемента чистящей головки; и
вычисляют (1050) посредством контроллера положение элемента чистящей головки относительно корпуса щетки на основании информации об отклонении и/или повороте элемента чистящей головки.
4. Способ по п. 3, дополнительно содержащий этап, на котором определяют (1060), из вычисленного положения элемента чистящей головки относительно корпуса щетки, усилие, действующее на элемент чистящей головки.
5. Способ по п. 3, дополнительно содержащий этап, на котором определяют (1060), из вычисленного положения элемента чистящей головки относительно корпуса щетки, угол элемента чистящей головки.
6. Способ по п. 3, дополнительно содержащий этап, на котором оценивают (1070), используя множество вычисленных положений элемента чистящей головки, измерение эффективности сеанса чистки.
7. Способ по п. 4, дополнительно содержащий этап, на котором используют (1060) вычисленное усилие, действующее на элемент чистящей головки или посредством элемента чистящей головки, для управления амплитудой движения чистящей головки посредством устройства для очистки полости рта.
| WO 2014098950 A1, 26.06.2014 | |||
| US 2012310593 A1, 06.12.2012 | |||
| WO 2016174621 A1, 03.11.2016 | |||
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С СИСТЕМОЙ СКЛАДЫВАНИЯ ЛОПАСТЕЙ | 2013 |
|
RU2519579C1 |
| WO 2014202250 A1, 24.12.2014. | |||

