Область техники, к которой относится изобретение
[0001] Настоящее изобретение направлено, в целом, на способы и системы для определения местоположения и отслеживания перемещения ротового чистящего устройства с помощью входного сигнала датчика.
Уровень техники
[0002] Правильная методика чистки зубов, включающая в себя длительность и охват чистки щеткой, помогает обеспечивать долговременное здоровое состояние зубов. Множество зубных проблем испытываются людьми, которые либо не чистят регулярно свои зубы, либо которые делают это ненадлежащим образом. Среди людей, которые регулярно выполняют чистку щеткой, неправильные привычки чистки щеткой могут приводить в результате к плохому охвату чистки щеткой и, таким образом, к образованию поверхностей, которые не очищены надлежащим образом.
[0003] Чтобы способствовать правильной методике чистки щеткой, были сконструированы зубные щетки, чтобы обеспечивать функцию таймера, так что пользователь знает, что необходимо выполнять чистку в течение минимально рекомендуемого интервала времени. Функция таймера может включать в себя слышимый звук, тактильную обратную связь или другой механизм оповещения, чтобы позволять пользователю знать, когда предварительно определенный интервал времени прошел. Это предоставляет пользователю указание, что он чистил свои зубы в течение надлежащего интервала времени.
[0004] Другим механизмом, чтобы способствовать правильной методике чистки щеткой, является обеспечение того, что существует надлежащая чистка всех зубных поверхностей, включающих в себя области рта, которых трудно достичь, или которые имеют тенденцию быть неправильно очищенными в течение среднестатистического сеанса чистки щеткой. Одним способом, чтобы обеспечивать надлежащий охват, является отслеживание позиции зубной щетки во рту во время сеанса чистки щеткой и сравнение его с картой зубных поверхностей. Например, система с датчиками, расположенными в фиксированном соотношении к зубам пользователя, может отслеживать перемещение зубной щетки над зубами пользователя.
[0005] Альтернативно, зубная щетка может включать в себя один или более внутренних датчиков, которые пытаются отслеживать перемещение устройства во рту. В такой системе пользователь начинает с зубной щеткой в известной, фиксированной позиции во рту, и последующее перемещение щетки определяется из одного или более внутренних датчиков. Однако, этот подход имеет несколько ограничений. Пользователи не могут перемещать свою голову во время чистки щеткой, поскольку это мешает правильному позиционированию первоначального фиксированного эталонного местоположения. Система путается между некоторыми областями рта, где данные будут аналогичными, такими как верхняя левая внутренняя сторона рта и верхняя правая наружная сторона рта. Разрешающая способность системы является низкой, означая, что только широкие сегменты рта могут отслеживаться вместо более точного позиционирования, например, относительно зубов.
[0006] Соответственно, существует продолжающаяся необходимость на уровне техники в способе для отслеживания перемещения зубной щетки во рту с помощью входного сигнала датчика.
Сущность изобретения
[0007] Настоящее изобретение направлено на патентоспособные способы и системы для отслеживания перемещения ротового чистящего устройства во рту. Будучи применимыми к системе, сконфигурированной, чтобы определять расположение ротового чистящего устройства во рту, патентоспособные способы системы допускают большую точность отслеживания и, таким образом, предоставляют оценку пользовательской методики чистки щеткой. Система использует модель на основе закона Фиттса, чтобы предоставлять количественный показатель активности чистки человеком во рту. Согласно варианту осуществления, модель на основе закона Фиттса предоставляет возможность для определения расстояния, покрываемого в сегменте рта - и, таким образом, числа почищенных зубов - на основе интервала времени, необходимого, чтобы завершать перемещение, и времени наблюдения. Согласно варианту осуществления, модель на основе закона Фиттса также предоставляет возможность для определения конкретного перехода от одного сегмента рта к другому на основе интервала времени, необходимого, чтобы осуществлять переход, и времени наблюдения. Система отслеживает перемещения и позиции в ходе сеанса чистки щеткой и использует эту информацию, чтобы предоставлять обратную связь пользователю.
[0008] В целом, в одном аспекте предоставляется способ определения расположения ротового чистящего устройства во рту пользователя. Способ включает в себя этапы: (i) определения, на основе информации датчика, принятой от идентификатора движения, первого местоположения ротового чистящего устройства во рту пользователя; (ii) измерения, с помощью информации датчика, принятой от идентификатора движения, интервала времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении; (iii) вычисления, с помощью закона Фиттса и измеренного прошедшего интервала времени, числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени; и (iv) определения, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
[0009] Согласно варианту осуществления, определение числа зубов, на которое ротовое чистящее устройство было смещено во время перемещения, используется, чтобы определять, какие из зубов пользователя были почищены во время перемещения.
[0010] Согласно варианту осуществления первое местоположение является сегментом рта.
[0011] Согласно варианту осуществления, закон Фиттса содержит формулу
W * 2((MT - a)/b)-1=D,
где MT является прошедшим интервалом времени, W, a и b являются предварительно определенными значениями, и D является расстоянием перемещения в первом местоположении.
[0012] Согласно варианту осуществления, способ дополнительно включает в себя этап предоставления калибровочных данных для ротового чистящего устройства.
[0013] Согласно варианту осуществления, калибровочные данные содержат одно или более значений для W, a и b.
[0014] Согласно варианту осуществления, способ дополнительно включает в себя этап оценки сеанса чистки щеткой. Согласно варианту осуществления, оценка содержит информацию о том, какие зубы были почищены во время сеанса чистки щеткой. Согласно варианту осуществления, оценка содержит информацию о том, как хорошо каждый зуб был почищен во время сеанса чистки щеткой.
[0015] Согласно аспекту представлено ротовое чистящее устройство. Устройство включает в себя идентификатор движения и контроллер в соединении с идентификатором движения. Контроллер конфигурируется, чтобы: (i) определять, на основе информации датчика, принятой от идентификатора движения, первое местоположение ротового чистящего устройства во рту пользователя; (ii) измерять, с помощью информации датчика, принятой от идентификатора движения, интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении; (iii) вычислять, с помощью закона Фиттса и измеренного прошедшего интервала времени, число зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени; и (iv) определять, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
[0016] Согласно аспекту представлена ротовая чистящая система. Система включает в себя ротовое чистящее устройство с идентификатором движения и модулем связи, где ротовое чистящее устройство конфигурируется, чтобы передавать, через модуль связи, данные датчика от идентификатора движения. Система также включает в себя устройство в соединении с ротовым чистящим устройством и содержащее процессор, где процессор конфигурируется, чтобы: (i) определять, на основе информации датчика, принятой от идентификатора движения, первое местоположение ротового чистящего устройства во рту пользователя; (ii) измерять, с помощью информации датчика, принятой от идентификатора движения, интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении; (iii) вычислять, с помощью закона Фиттса и измеренного прошедшего интервала времени, число зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени; и (iv) определять, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
[0017] Согласно аспекту представлен способ определения местоположения ротового чистящего устройства во рту пользователя. Способ включает в себя этапы: (i) определения, на основе информации датчика, принятой от идентификатора движения, первого местоположения ротового чистящего устройства во рту пользователя; (ii) обнаружения, с помощью информации датчика, принятой от идентификатора движения, перехода ротового чистящего устройства из первого местоположения во второе местоположение во рту пользователя; (iii) вычисления, с помощью закона Фиттса и прошедшего интервала времени для перехода, вероятности, с которой множество возможных переходов произошли в течение прошедшего интервала времени; и (iv) определения, на основе первого местоположения и вычисленной вероятности перехода, второго местоположения.
[0018] Следует принимать во внимание, что все комбинации вышеприведенных принципов и дополнительных принципов, подробнее поясненных ниже (если такие принципы не являются взаимно несогласованными), считаются частью изобретаемого объекта изобретения, раскрытого в данном документе. В частности, все комбинации заявленного объекта изобретения, указанного в конце этого раскрытия сущности, считаются частью изобретаемого объекта изобретения, раскрытого в данном документе.
[0019] Эти и другие аспекты изобретения должны становиться очевидными и истолковываться со ссылкой на вариант(ы) осуществления, описанные ниже в данном документе.
Краткое описание чертежей
[0020] На чертежах аналогичные ссылки с номером, в общем, ссылаются на идентичные части в различных представлениях. Кроме того, чертежи необязательно начерчены в масштабе, вместо этого акцент делается на понятности иллюстрирования принципов изобретения.
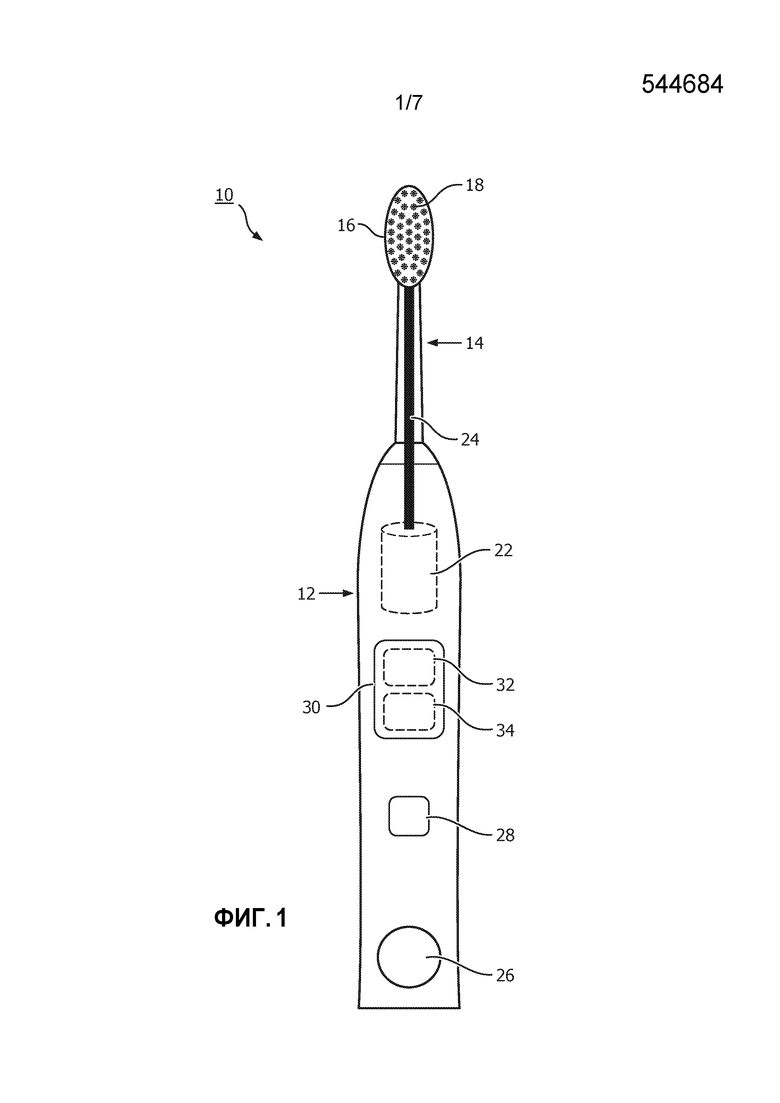
[0021] Фиг. 1 - это представление ротового чистящего устройства в соответствии с вариантом осуществления.
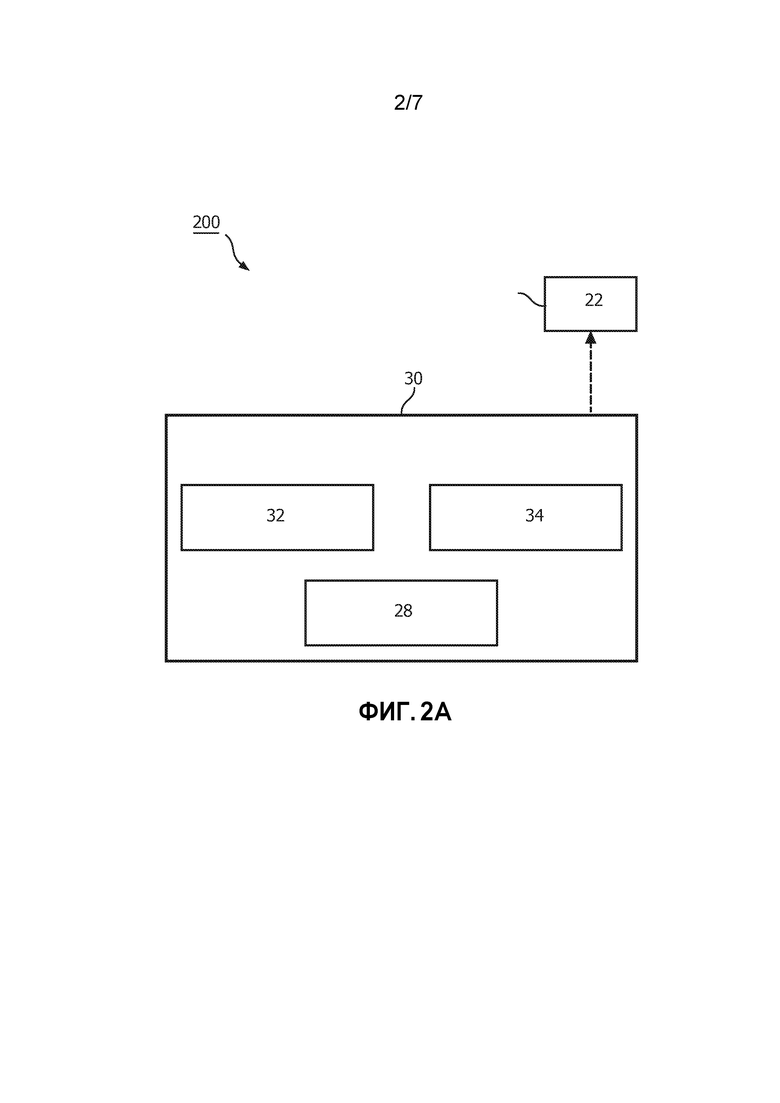
[0022] Фиг. 2A - это схематичное представление системы управления ротовым чистящим устройством в соответствии с вариантом осуществления.
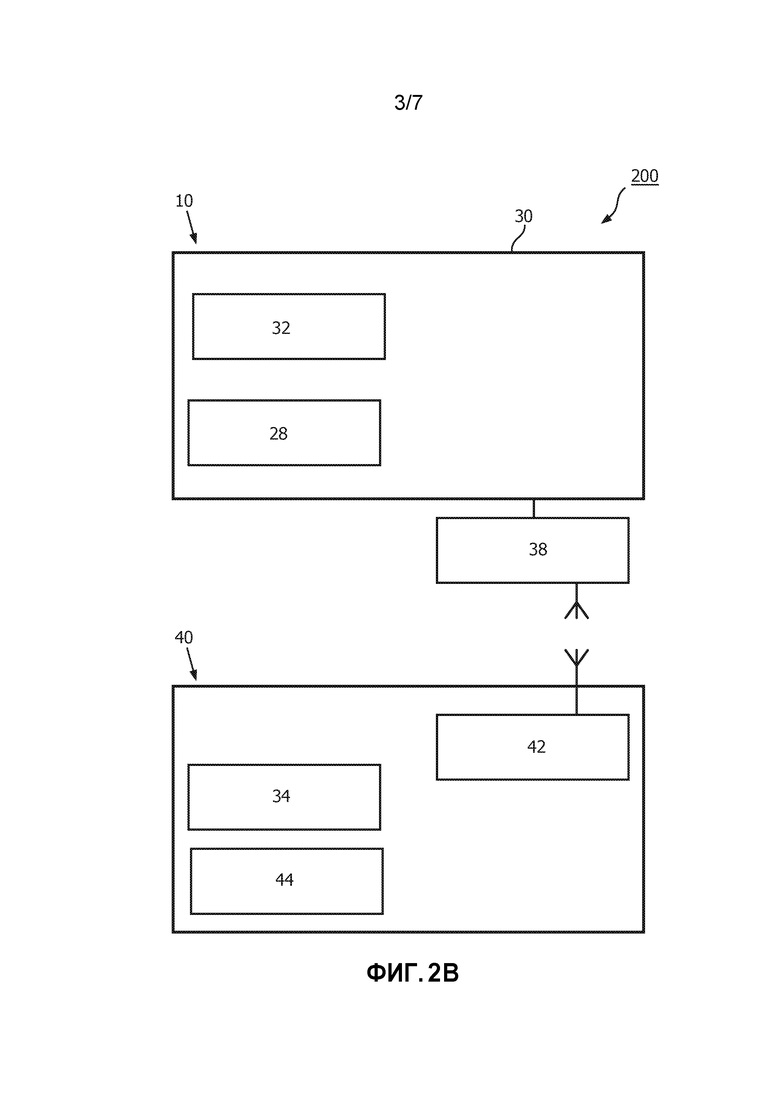
[0023] Фиг. 2B - это схематичное представление системы управления ротовым чистящим устройством в соответствии с вариантом осуществления.
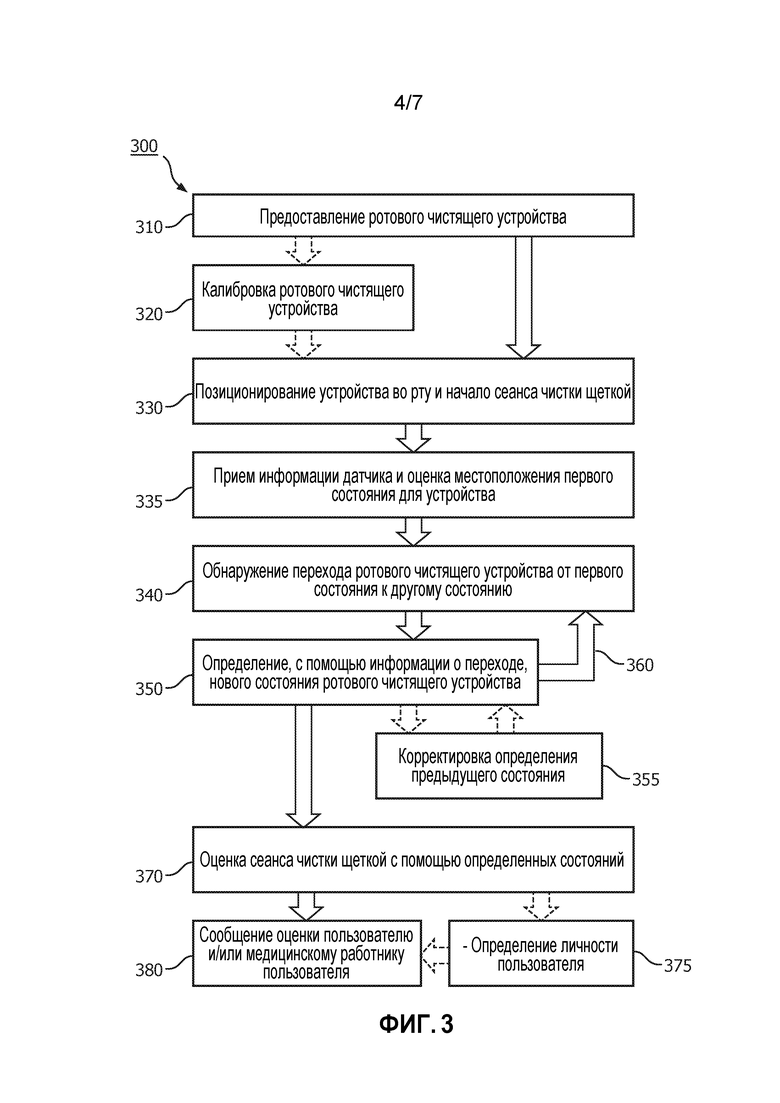
[0024] Фиг. 3 - это блок-схема последовательности операций, изображающая способ отслеживания перемещения ротового чистящего устройства во рту с помощью входного сигнала пространственного датчика в соответствии с вариантом осуществления.
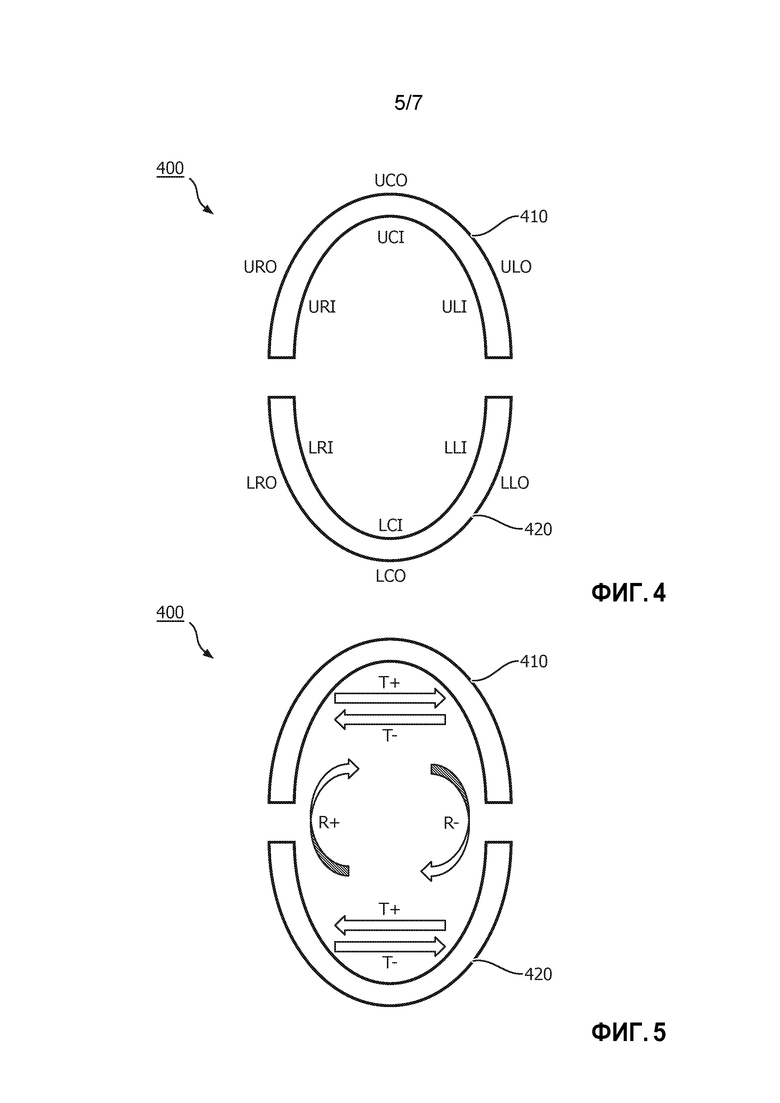
[0025] Фиг. 4 - это схематичное представление различных состояний в ротовой полости в соответствии с вариантом осуществления.
[0026] Фиг. 5 - это схематичное представление различных состояний в ротовой полости в соответствии с вариантом осуществления.
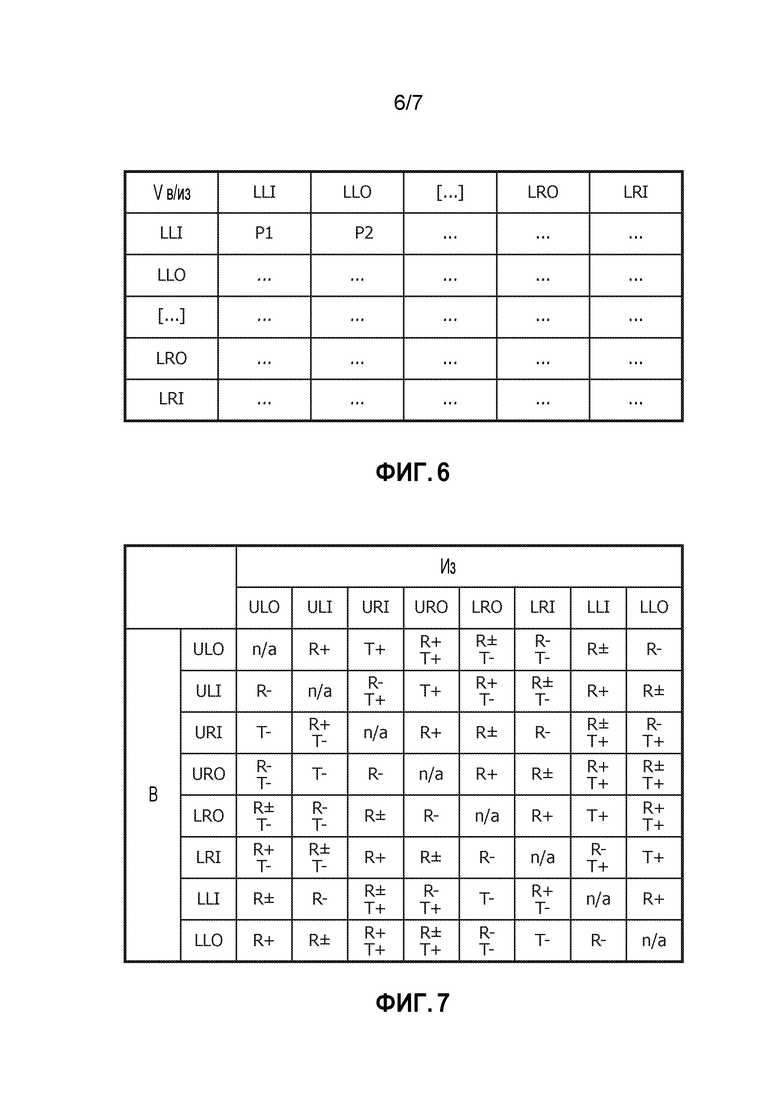
[0027] Фиг. 6 - это таблица вероятностей переходов в соответствии с вариантом осуществления.
[0028] Фиг. 7 - это таблица переходов между различными состояниями в ротовой полости в соответствии с вариантом осуществления.
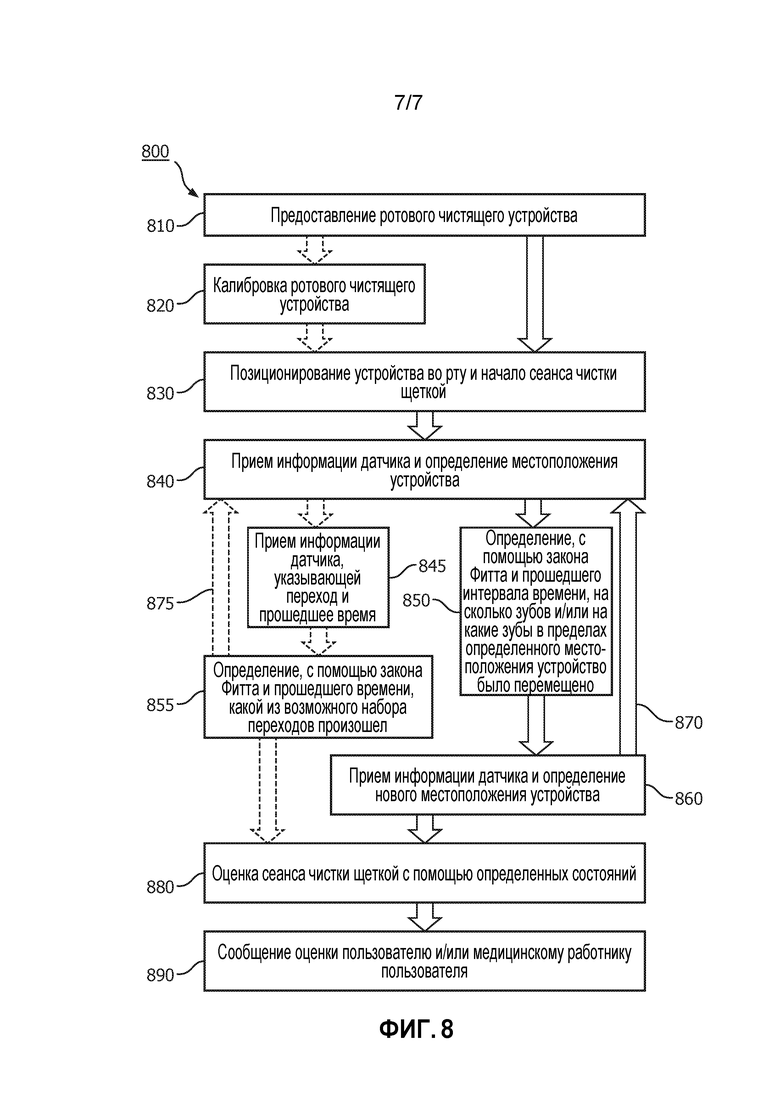
[0029] Фиг. 8 - это блок-схема последовательности операций, изображающая способ отслеживания перемещения ротового чистящего устройства во рту с помощью входного сигнала пространственного датчика в соответствии с вариантом осуществления.
Подробное описание вариантов осуществления
[0030] Настоящее изобретение описывает различные варианты осуществления способа и контроллера для отслеживания перемещения и позиции ротового чистящего устройства во рту. В более общем смысле, заявитель узнал и оценил, что будет полезно предоставить систему, чтобы отслеживать перемещение ротового чистящего устройства во рту для того, чтобы предоставлять обратную связь о чистке щеткой пользователю. Соответственно, способы, описанные или иначе представленные в данном документе, предоставляют ротовое чистящее устройство, сконфигурированное, чтобы определять позицию ротового чистящего устройства во рту пользователя и определять, среди других переменных, как долго пользователь чистит отдельные позиции во рту. Согласно варианту осуществления, способ использует модель на основе закона Фиттса, чтобы предоставлять количественные показатели активности чистки щеткой человека во рту. Согласно варианту осуществления, модель на основе закона Фиттса предоставляет возможность определения расстояния, охватываемого в сегменте рта, на основе интервала времени, необходимого, чтобы осуществлять перемещение, и времени наблюдения.
[0031] Конкретной целью использования вариантов осуществления и реализаций в данном документе является предоставление информации о чистке щеткой с помощью ротового чистящего устройства, такого как электрическая зубная щетка.
[0032] Обращаясь к фиг. 1, в одном варианте осуществления предоставляется ротовое чистящее устройство 10, которое включает в себя фрагмент 12 корпуса и элемент 14 головки щетки, установленный на фрагмент корпуса. Элемент 14 головки щетки включает в себя на своем конце, удаленном от фрагмента корпуса, головку 16 щетки. Головка 16 щетки включает в себя щетинистую поверхность 18, которая предусматривает множество щетинок. Согласно варианту осуществления, щетинки протягиваются вдоль оси, практически перпендикулярной оси протяжения головки, хотя многие другие варианты осуществления головки щетки и щетинок возможны.
[0033] Согласно варианту осуществления, элемент 14 головки щетки устанавливается так, чтобы иметь возможность двигаться относительно фрагмента 12 корпуса. Перемещение может быть любым из множества различных перемещений, включающих в себя вибрации или вращение, среди прочих.
[0034] Согласно варианту осуществления, фрагмент 12 корпуса включает в себя цепь 22 привода для формирования движения и компонент 24 передачи для передачи сформированных движений элементу 14 головки щетки. Например, цепь 22 привода может содержать мотор или электромагнит(ы), которые создают движение компонента 24 передачи, которое затем передается элементу 14 головки щетки. Цепь 22 привода может включать в себя такие компоненты как источник питания, осциллятор и один или более электромагнитов, среди других компонентов.
[0035] Фрагмент 12 корпуса дополнительно снабжается средством 26 пользовательского ввода, чтобы активировать и деактивировать генератор 22 движения. Средство 26 пользовательского ввода предоставляет возможность пользователю приводить в действие ротовое чистящее устройство 10, например, включать и выключать ротовое чистящее устройство 10. Средство 26 пользовательского ввода может быть, например, кнопкой, сенсорным экраном или переключателем.
[0036] Хотя в настоящем варианте осуществления ротовое чистящее устройство 10 является электрической зубной щеткой, будет понятно, что в альтернативном варианте осуществления ротовое чистящее устройство является ручной зубной щеткой (не показана). В такой конфигурации ручная зубная щетка имеет электрические компоненты, но головка щетки механически не приводится в действие посредством электрического компонента.
[0037] Ротовое чистящее устройство 10 включает в себя один или более идентификаторов 28 движения. Идентификатор 28 движения показан на фиг. 1 в фрагменте 12 корпуса, но может быть расположен в устройстве в любом месте, включающем в себя, например, элемент 14 головки щетки или головку 16 щетки. Идентификаторы 28 движения содержат, например, систему 6-осевых или 9-осевых пространственных датчиков. Например, идентификатор 28 движения конфигурируется, чтобы предоставлять показания шести осей относительного движения (трехосное перемещение и трехосное вращение) с помощью, например, 3-осного гироскопа и 3-осного акселерометра. В качестве другого примера, идентификатор 28 движения конфигурируется, чтобы предоставлять показания девяти осей относительного движения с помощью, например, 3-осного гироскопа, 3-осного акселерометра и 3-осного магнетометра. Другие датчики могут быть использованы либо отдельно, либо вместе с этими датчиками, включая в себя, но не только, датчик давления и другие типы датчиков. Множество различных типов датчиков могут быть использованы, чтобы определять состояние и/или переход устройства, как описано или иначе представлено в этом варианте осуществления.
[0038] Идентификатор 28 движения располагается в предварительно определенной позиции и ориентации в ротовом чистящем устройстве 10. Следовательно, ориентация и позиция элемента 14 головки щетки могут быть легко определены на основе известной ориентации и позиции идентификатора 28 движения. Соответственно, элемент 14 головки щетки находится в фиксированном пространственном относительном размещении относительно идентификатора 28 движения.
[0039] Идентификатор 28 движения конфигурируется, чтобы формировать информацию, указывающую ускорение и угловую ориентацию ротового чистящего устройства 10. Система датчиков может содержать два или более идентификаторов 28 движения, которые функционируют вместе как система 6-осных или 9-осных пространственных датчиков. Согласно другому варианту осуществления, интегрированный 9-осный пространственный датчик может обеспечивать экономию пространства в ротовом чистящем устройстве 10.
[0040] Информация, сформированная посредством первого идентификатора 28 движения, предоставляется контроллеру 30. Контроллер 30 может содержать процессор 32 и память 34. Процессор 32 может принимать любую подходящую форму. Например, процессор 32 может быть или включать в себя микроконтроллер, множество микроконтроллеров, схему, единственный процессор или множество процессоров. Контроллер 30 может быть сформирован из одного или множества модулей и функционирует, чтобы приводить в действие ротовое чистящее устройство 10 в ответ на входной сигнал, например, средства 26 пользовательского ввода. Например, контроллер 30 может быть сконфигурирован, чтобы приводить в действие блок управления мотором. Согласно варианту осуществления, идентификатор 28 движения встроен в контроллер 30. Контроллер 30 может также содержать или быть в соединении с часами и/или таймером, сконфигурированным, чтобы измерять один или более интервалов времени, как изложено более подробно ниже.
[0041] Память 34 может принимать любую подходящую форму, включающую в себя энергонезависимую память и/или RAM. Энергонезависимая память может включать в себя постоянное запоминающее устройство (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, среди прочего, операционную систему. RAM используется процессором для временного хранения данных. Операционная система может содержать код, который, когда исполняется контроллером 30, управляет работой каждого из компонентов аппаратных средств ротового чистящего устройства 10.
[0042] Обращаясь к фиг. 2A, предоставляется вариант осуществления ротовой чистящей системы 200. Согласно варианту осуществления, ротовая чистящая система 200 включает в себя один или более идентификаторов 28 движения и контроллер 30, содержащий процессор 32 и память 34. Когда используется с электрическими чистящими устройствами, ротовая чистящая система 200 включает в себя цепь 22 привода, работа которой управляется посредством контроллера 30.
[0043] Обращаясь к фиг. 2B, это другой вариант осуществления ротовой чистящей системы 200, содержащей ротовое чистящее устройство 10 и устройство 40, которое является отдельным от ротового чистящего устройства. Ротовое чистящее устройство 10 может быть любым из вариантов осуществления ротового чистящего устройства, раскрытых или иначе представленных в данном документе. Согласно варианту осуществления, ротовое чистящее устройство 10 включает в себя один или более идентификаторов 28 движения для информации пространственного датчика и контроллер 30, содержащий процессор 32. Ротовое чистящее устройство 10 может включать в себя цепь 22 привода, работа которой управляется посредством контроллера 30.
[0044] Согласно варианту осуществления, ротовое чистящее устройство 10 дополнительно содержит модуль 38 связи, который передает накопленную информацию пространственного датчика. Модуль связи может быть любым модулем, устройством или средством, способным передавать проводной или беспроводной сигнал, включающим в себя Wi-Fi, Bluetooth, связь малого радиуса действия и/или сотовый модуль.
[0045] Согласно варианту осуществления, устройство 40 может быть любым устройством, сконфигурированным или способным принимать и обрабатывать информацию пространственного датчика, передаваемую от ротового чистящего устройства 10. Например, устройство 40 может быть держателем чистящего устройства или станцией, смартфоном, компьютером, сервером или любым другим компьютеризированным устройством. Согласно варианту осуществления, устройство 40 включает в себя модуль 42 связи, который может быть любым модулем, устройством или средством, способным принимать проводной или беспроводной сигнал, включающим в себя, но не только, Wi-Fi, Bluetooth, связь малого радиуса действия и/или сотовый модуль. Устройство 40 также включает в себя процессор 44, который использует принятую информацию пространственного датчика от идентификатора 28 движения, чтобы определять и отслеживать позицию ротового чистящего устройства 10, когда пользователь перемещает устройство по всему рту, как описано в данном документе. Согласно одному варианту осуществления, устройство 40 может включать в себя память 34, чтобы хранить калибровочные данные, принятую информацию пространственного датчика или любую другую информацию.
[0046] В качестве только одного примера, ротовое чистящее устройство 10 может собирать информацию датчика с помощью идентификатора 28 движения и передавать эту информацию локально через Bluetooth-соединение устройству 40 смартфона, где информация датчика обрабатывается и/или сохраняется. В качестве другого примера, ротовое чистящее устройство 10 может собирать информацию датчика с помощью идентификатора 28 движения и передавать эту информацию через WiFi-соединение в Интернет, где она передается удаленному серверному устройству 40. Удаленное серверное устройство 40 обрабатывает и/или сохраняет информацию датчика. Пользователь может осуществлять доступ к этой информации непосредственно или может принимать отчеты, обновления или другую информацию от удаленного серверного устройства 40 или ассоциированного устройства.
[0047] Согласно варианту осуществления, контроллер 30 ротового чистящего устройства 10 и/или контроллер удаленного устройства 40 также использует информацию датчика от идентификатора 28 движения, чтобы определять и отслеживать позицию ротового чистящего устройства 10 с помощью вероятностной графической модели, такой как скрытая Марковская модель ("HMM") или любая другая вероятностная графическая модель или гибридный способ, чтобы оценивать местоположение ротового чистящего устройства 10 из информации пространственного датчика, принятой от идентификатора 28 движения. Позиции во рту имеют особое обозначение, и каждое из этих обозначений может рассматриваться как отдельная позиция головки щетки ротового чистящего устройства 10. Например, приблизительная позиция головки щетки во рту называется состоянием. Хотя согласно некоторым вариантам осуществления состояние может быть точной позицией головки щетки на зубе, или более конкретно, на конкретной части зуба, состояние может быть более широко сегментом или участком рта, таким как верхняя левая наружная сторона, верхняя левая внутренняя сторона и другие (см. таблицу 1). Когда пользователь выполняет перемещение между различными состояниями во рту, информация о перемещении формируется посредством идентификатора 28 движения и отправляется контроллеру 30. Вероятностная графическая модель создает лучшую оценку для текущего состояния, где распределение вероятности текущего состояния вычисляется из распределения вероятности предыдущего состояния и вероятностей перехода из одного состояния в любое другое состояние, как обнаружено посредством идентификатора 28 движения. Таким образом, наиболее вероятное местоположение устройства в заданном пространстве определяется на основе распределений вероятностей предыдущего состояния, объединенных с распределениями вероятностей перехода, где распределения являются одной или более матрицами, которые содержат информацию о вероятности переходов между состояниями. Может быть задействовано множество матриц переходов, таких как статистическая матрица, которая содержит поведенческую информацию, такую как то, насколько вероятен переход, на основе калибровки пользователем, и матрицу, содержащую вероятность перехода, случившегося на основе показателей датчика, и/или матрицу, содержащую вероятность перехода, случившегося на основе предыдущего знания системы.
[0048] Согласно варианту осуществления, контроллер 30 ротового чистящего устройства 10 и/или контроллер удаленного устройства 40 использует информацию датчика от идентификатора 28 движения для отслеживания с высокой разрешающей способностью ротового чистящего устройства во рту пользователя. Согласно варианту осуществления, система конфигурируется для измерения позиции и перемещения с разрешающей способностью от зуба к зубу. Система использует модель на основе закона Фиттса, чтобы определять расстояние, охватываемое пользователем в сегменте рта - и, таким образом, число очищаемых щеткой зубов - на основе интервала времени, необходимого, чтобы осуществлять движение, и времени наблюдения. Закон Фиттса прогнозирует, что время, требуемое для перемещения в целевую область, является функцией соотношения между расстоянием до цели и шириной цели, с помощью следующего уравнения:
MT=a+b * log2 (2D/W) (уравнение 1)
где MT - это время перемещения, или среднее время для осуществления перемещения, которое может быть измерено посредством компонента часов системы. Дополнительно, a и b являются параметрами системы и могут быть определены либо при разработке, либо во время калибровки устройства. Например, a и b могут быть значениями, которые являются предварительно определенной заводской настройкой, зависящей от подразумеваемого пользователя устройства, такого как взрослый человек в сравнении с ребенком и/или мужчина в сравнении с женщиной. В качестве другого примера, a и b могут быть значениями, которые определяются во время сеанса калибровки, когда пользователь проводит управляемый сеанс чистки щеткой. Данные, полученные во время сеанса калибровки, могут необязательно быть обработаны и сохранены, и параметры a и b модели могут быть определены и заданы. D является расстоянием от начальной точки до центра цели и согласно варианту осуществления является результатом прогнозирования. W - это ширина цели, измеренная вдоль оси движения. Например, W может быть допустимой погрешностью в конечной позиции, поскольку конечная точка движения должна попадать в пределы+W/2 от центра цели. Согласно варианту осуществления, W может быть приблизительно размером человеческого зуба. Соответственно, W может быть основано, по меньшей мере, частично, на подразумеваемом пользователе устройства, таком как взрослый человек в сравнении с ребенком и/или мужчина в сравнении с женщиной.
[0049] Согласно варианту осуществления, Уравнение 1 может быть модифицировано в:
(MT - a)/b=log2 (2D/W) (уравнение 2)
2 ((MT - a)/b)=2D/W (уравнение 3)
W * 2((MT - a)/b)-1=D (уравнение 4)
Соответственно, когда параметры W, a и b известны, Уравнение 4 предоставляет возможность оценки расстояния D перемещения, когда наблюдается время MT.
[0050] Согласно варианту осуществления, система 200 использует информацию о местоположении более высокого разрешения, полученную посредством модели на основе закона Фиттса, отдельно или в сочетании с информацией о местоположении более низкого разрешения, полученной с помощью вероятностной графической модели. Например, после того как конкретное состояние, сегмент или другой показатель верхнего уровня для местоположения во рту идентифицирован, эта информация может быть дополнена более конкретной зубной информацией, полученной с помощью модели на основе закона Фиттса.
[0051] Обращаясь к фиг. 3, в одном варианте осуществления, предоставляется блок-схема последовательности операций способа 300 для отслеживания перемещения устройства в заданном пространстве. На этапе 310 способа предоставляется ротовое чистящее устройство 10. Ротовое чистящее устройство может быть любым из вариантов осуществления, описанных или иначе представленных в данном документе. Например, согласно одному варианту осуществления, ротовое чистящее устройство 10 включает в себя фрагмент 12 корпуса, элемент 14 головки щетки со щетинистой поверхностью 18, идентификатор 28 движения и контроллер 30 с процессором 32 и памятью 34. Множество других вариантов осуществления ротового чистящего устройства 10 также возможны.
[0052] На необязательном этапе 320 способа ротовое чистящее устройство 10 может быть откалибровано. Калибровка может содержать, например, определение позиций и/или переходов в системе, которое может быть выполнено на производстве или пользователем. Данные калибровки состояния состоят из аннотированных наборов данных датчика. Во время сеанса калибровки, например, назначенная область чистится щеткой, и мгновенные данные датчика аннотируются и сохраняются.
[0053] Согласно варианту осуществления, калибровка может быть выполнена отдельным пользователем, поскольку челюсть является уникальной. Это может быть выполнено несколькими способами. Например, пользователь может просто использовать устройство, и система может воссоздавать карту челюсти, регистрируя формы и пограничные условия, такие как точка разворота на задних коренных зубах. Согласно другому способу пользовательской калибровки, пользователь направляется через сеанс чистки щеткой, в котором ему указывается, где он должен чистить щеткой, так что система может сопоставлять местоположение со своими данными датчика, также как обучать систему характеру движений пользователя (например, быстрые или медленные переходы).
[0054] Согласно варианту осуществления этап калибровки пропускается. Вместо этого, ротовое чистящее устройство вырабатывает набор калибровочных данных в течение одного или более сеансов чистки щеткой, сравнивая данные между такими сеансами. Способ самообучения должен также быть использован, чтобы дополнять, улучшать или иначе корректировать заводскую или пользовательскую калибровку.
[0055] На этапе 330 способа ротовое чистящее устройство располагается во рту в первом местоположении, и пользователь начинает чистить щеткой свои зубы.
[0056] На этапе 335 способа система определяет вероятность первого состояния с помощью вероятностной графической модели. Согласно варианту осуществления, модель будет определять вероятность текущего состояния с помощью вероятности предыдущего состояния, вероятности текущего состояния, основанной на калибровочных данных, и вероятности перехода от предыдущего состояния к текущему состоянию, согласно формуле:
 (уравнение 5)
(уравнение 5)
где P(s) является матрицей вероятностей текущего состояния, P(s-1) является матрицей вероятностей предыдущего состояния, P(T) является матрицей вероятностей перехода из каждого состояния s-1 в состояние s, и P(scal) является матрицей вероятностей текущего состояния на основе калибровочных данных с этапа 320. Результирующее распределение затем нормализуется.
[0057] Однако, во время оценки первой позиции во рту пользователя не будет вероятности предыдущего местоположения. Соответственно, для оценки первой позиции только калибровочные данные могут быть использованы, чтобы определять местоположение. Существует несколько способов для оценки текущего состояния, и они предоставляются более подробно ниже. Например, согласно варианту осуществления, вероятность первого, неизвестного, состояния определяется на основе калибровочных данных, в то время как последующие неизвестные состояния определяются с помощью уравнения  .
.
[0058] Согласно варианту осуществления, матрица T переходов предоставляет вероятность перехода из каждого возможного состояния в каждое другое возможное состояние.
[0059] Матрица затем умножается на матрицу S текущего состояния. Например, текущее состояние было 100% точно известным, но это не является обязательным случаем. Текущая позиция, главным образом, также является неопределенной, приводя к матрице S с распределением вероятностей. Результат умножения вероятностей перехода и вероятностей состояния дает нам новую матрицу P распределения вероятностей состояния. Из этой матрицы P наиболее вероятное текущее состояние может быть определено и использовано, чтобы предоставлять обратную связь пользователю.
 (уравнение 6)
(уравнение 6)
[0060] Матрица T переходов сама может быть результатом умножения вероятностей и может также содержать вероятностную информацию о манерах поведения. Например, маловероятно, что пользователь пропустит один зуб во время чистки щеткой. Например, переход от зуба №1 к зубу №3, в то же время полностью пропуская зуб №2 между ними, является маловероятным. Существует вероятность перехода между каждыми двумя зубами, которая может быть включена в матрицу T переходов. Эти поведенческие вероятности могут быть получены, например, посредством направляемого сеанса калибровки или данных, добытых из изучений потребителей.
[0061] Согласно варианту осуществления, матрица T перехода содержит информацию о пограничном условии. Поскольку форма челюсти известна, пограничные условия могут быть наложены на вычисление. Например, если система отслеживает абсолютную позицию на челюсти, и информация от указателя движения подсказывает, что новая позиция находится в пяти сантиметрах снаружи челюсти, тогда это определяется как ничтожная вероятность, поскольку оцениваемое местоположение не попадает в границы системы. В такой момент отслеживание может рассматриваться как потерянное до тех пор, пока оцениваемое новое местоположение не попадет обратно в пограничные условия системы, или вторая позиция, лежащая в границах системы, также имеет высокую вероятность являться истинным местоположением. Всякий раз, когда отслеживание теряется и находится снова, промежуточный путь может быть обратно отслежен от вновь найденной позиции, с помощью вероятностей перехода, которые произошли, в то время как траектория была потеряна.
[0062] Согласно варианту осуществления, мгновенные значения датчика могут уже предоставлять указание местоположения, прежде чем рассматриваются вероятности перехода. Каждое сочетание данных датчика уже ограничивает вероятную позицию. Например, когда щетка направлена внутрь, щетка располагается снаружи челюсти, что исключает некоторые состояния. Эти наблюдения могут также помогать возвращать потерянное отслеживание позиции. Модель, которая связывает состояния с мгновенными данными датчика, может быть данными, добытыми из этапов калибровки, либо конечным пользователем, либо во время разработки.
[0063] На этапе 340 способа переход происходит и обнаруживается посредством информации от идентификатора 28 движения. Например, идентификатор движения может обнаруживать перемещение от одной стороны рта к другой стороне, вращение от внутренней стороны рта к наружной стороне рта, или и перемещение, и вращение. Гироскоп, акселерометр, магнетометр, датчик давления и/или другие датчики идентификатора 28 движения отправляют информацию контроллеру 30 непрерывно или периодически, и изменение в этой информации может быть интерпретировано системой как переход, включающий в себя, но не только, перемещение, вращение и/или другие движения или переходы. Согласно варианту осуществления, контроллер интерпретирует информацию от идентификатора 28 движения как переход на основе сравнения с калибровочными данными, сравнения с предварительно определенными или предварительно запрограммированными данными и/или другими данными.
[0064] После того как переход осуществлен, контроллер 30 будет использовать эту информацию, чтобы определять, на этапе 350 способа, новое местоположение, или состояние, ротового чистящего устройства 10 во рту. Соответственно, в отличие от предыдущих способов, состояние определяется только после того, как переход устройства от предыдущего состояния к текущему состоянию осуществлен. Чтобы определять новое состояние, контроллер сравнивает информацию о переходе от идентификатора 28 движения с калибровочными данными. Например, контроллер может определять, насколько хорошо новые данные сравниваются с калибровочными точками, и получает показание сходства. Как описано ниже подробно, существует множество способов выполнять этап 350 посредством сравнения информации о переходе от идентификатора 28 движения с калибровочными данными, включающих в себя: (i) корреляцию гистограммы; (ii) анализ распределения плотности вероятностей; и/или (iii) анализ ближайшего соседа.
[0065] Для подхода корреляции гистограммы, нормализованная гистограмма строится для одной или более осей калибровочных данных и наблюдаемых в текущий момент данных датчика от идентификатора 28 движения. Корреляция вычисляется по скалярному произведению гистограмм, с поэлементным умножением и затем суммированием. Набор данных с наиболее совпадающими точками данных приведет к наивысшей сумме. Когда используются множество осей, суммарная оценка вычисляется посредством умножения результатов отдельных осей.
[0066] Для анализа распределения плотности вероятностей функция нормального распределения соответствует набору калибровочных данных с помощью следующего уравнения:
 (уравнение 7)
(уравнение 7)
Текущая позиция затем оценивается посредством нахождения вероятности каждой отдельной точки наблюдаемых данных датчика в распределении плотности вероятностей. Согласно варианту осуществления, этот подход является менее чувствительным к возможным пропускам в калибровочных данных, например.
[0067] Некоторые наблюдения состояния ведут к неопределенным результатам в определении местоположения. Для того, чтобы различать эти состояниями, необходимо взглянуть на переход(ы), которые ведут к состоянию. Наиболее отличительной характеристикой перехода во рту может быть, например, угловое смещение между первым и вторым состоянием. Однако, каждый переход соответствует только одному набору смещений (x, y и z). Следовательно, может не быть достаточных данных, чтобы строить нормальное распределение вероятностей для сравнения с калибровочным набором. Вследствие небольшого числа точек данных может быть использован анализ ближайшего соседа. Согласно варианту осуществления, когда наблюдается переход, система отыскивает пять ближайших (dx, dy, dz) соседей для перехода, хотя менее пяти или более пяти могут быть использованы в других вариантах осуществления. Предпочтительно, система отыскивает множество соседей, которые будут обойдены с равными шансами. Вероятность каждого перехода определяется по числу ближайших соседей каждой участвующей группы.
[0068] Следовательно, согласно варианту осуществления, для анализа ближайшего соседа наблюдаемые данные датчика от идентификатора 28 движения сравниваются с набором калибровочных данных посредством поиска в x-числе ближайших соседей в многомерном пространстве. Расстояние между измеренной точкой - которое определяется по наблюдаемым данным датчика от идентификатора 28 движения - и каждой точкой калибровки вычисляется, беря норму различия между точками, представленными в качестве двух векторов в трехмерном пространстве:
( ) (уравнение 8)
) (уравнение 8)
[0069] Вероятность для каждой позиции может затем быть вычислена по относительному числу ближайших соседней, назначаемых для этой позиции, с помощью, например, следующего уравнения, где n(total) является суммарным числом соседей, принимаемых во внимание:
P(s)= n(s)/n(total) (уравнение 9)
[0070] Согласно варианту осуществления, состояния и переходы в полости зуба могут быть ясно определены, включая, но не ограничиваясь калибровочными данными. Обращаясь к фиг. 4, в соответствии с вариантом осуществления определяются состояния для рта. Рот 400 включает в себя верхние зубы 410 и нижние зубы 420 с состояниями, определенными, как изложено в Таблице 1. Они могут также быть идентифицированы как сегменты рта. Переход является перемещением из какого-либо одного из состояний в любое другое из состояний. Некоторые переходы являются четкими, в то время как другие являются неопределенными, как изложено более подробно ниже. Дополнительно, некоторые переходы более вероятно должны происходить, в то время как другие менее вероятно должны происходить, и эта информация может необязательно быть составляющей анализа.
[0071] Таблица 1. Аббревиатуры состояний
[0072] Обращаясь к фиг. 5, в соответствии с вариантом осуществления определяются переходы между состояниями во рту. Рот 400 включает в себя верхние зубы 410 и нижние зубы 420 с переходами, определенными либо как положительное или отрицательное перемещение ("T") и/или положительное или отрицательное вращение ("R"). Некоторые переходы подразумевают только один тип движения (T или R), в то время как другие переходы подразумевают два типа движения (T и R).
[0073] Согласно варианту осуществления вероятность перехода может быть визуализирована как таблица, где наблюдаемый сигнал, такой как набор накопленных угловых изменений предоставляет вероятность того, что каждый возможный переход является истинным. Это может быть выполнено полностью вероятностным образом и/или на основе набора правил.
[0074] Вероятностный способ.
[0075] Согласно варианту осуществления, полностью вероятностный способ требует полного калибровочного набора данных датчика, который согласно варианту осуществления является вращательным движением. После обнаружения перехода, поворот датчика между моментами перед и после перехода сравнивается с калиброванным вращательным движением для каждого возможного перехода посредством одного из вышеупомянутых способов для оценки состояния, получающих в результате таблицу, как показано на фиг. 6. Для каждого перехода состояния, указанного как К/От, такого как от LLO (нижней левой наружной стороны) к LLI (нижней левой внутренней стороне), например, существует вероятность P2, что возможный переход является истинным.
[0076] Способ на основе правила.
[0077] Согласно варианту осуществления способ на основе правила основывается на предыдущем знании системы, где тип движения между каждым сегментом известен. Таблица создается с типом движения, который может быть определен, в этом случае перемещения влево и вправо (T+/-), вращения влево и вправо (R+/-), и/или вращения на 180°, как показано на фиг. 7. Согласно варианту осуществления, калибровочный набор может содержать только калибровочные данные (например, вращательные движения) для каждого типа движения.
[0078] Когда переход обнаруживается, сигнатуры вращательного движения сравниваются с существующими сигнатурами, в этом примере с помощью подхода ближайшего соседа, чтобы назначать вероятность для каждого наблюдаемого движения. Эти нормализованные вероятности назначаются соответствующим позициям в таблице, где движение, как ожидается, должно происходить. Все позиции, где движение не ожидается, получают назначенную инверсию вероятности. Согласно варианту осуществления, это приводит в результате к одной полной таблице для каждого возможного движения.
[0079] Например, когда положительное вращение R+ наблюдается с 0,6 достоверностью, элемент в таблице R+, где R+ возникает, получает назначенное значение 0,6. Всем другим элементам назначается (1-0,6), поскольку это является шансом для любых других быть истинными, когда R+ не наблюдается.
[0080] Согласно варианту осуществления, все таблицы затем умножаются поэлементно, чтобы получать окончательное распределение вероятностей перехода. Когда перемещение не наблюдается, каждому элементу назначается одинаковое значение (1/N), таким образом, таблица не влияет на связанные возможности в конце. Согласно варианту осуществления, представление не должно быть индивидуальными таблицами. Оно может также быть выполнено с помощью библиотек, таблиц поиска или другими способами.
[0081] Возвращаясь к уравнению 5 выше, вероятность нахождения в некотором состоянии, P(s), равна сумме шансов, полученных посредством всех комбинаций, начинающихся в каком-либо другом состоянии, P(s-1), и переходящих к этому конкретному местоположению с вероятностью P(T). Чтобы разрешать неопределенность и достигать более хорошей оценки, оценка умножается снова на вероятность текущего состояния на основе калибровочных данных, P(Scal).
[0082] Согласно варианту осуществления, разрешающая способность неопределенности требует информации об источнике P(s-1), информации о переходе P(T) и информации о месте назначения P(scal). Это обусловлено тем, что, например, в некоторых позициях, состояние, обнаруженное в зубной полости, может быть минимумом из двух различных состояний. Например, ULO и URI могут быть неразличимы до тех пор, пока не произойдет переход, и даже затем некоторые переходы могут быть неразличимы. Переход от ULO к ULI или от ULI к ULO, например, содержит вращение, но может быть трудно для системы определять точное позиционирование по меньшей мере до тех пор, пока не будет введена асимметрия. Как только существует различимый переход, вызванный асимметрией, тогда система свободна от неопределенности. Типично, система не только будет свободна от неопределенности, но будет способна определять предыдущее состояние, которое было ранее неопределенным.
[0083] На необязательном этапе 355 способа на фиг. 3, согласно варианту осуществления, одно или более определений предыдущего состояния корректируются. Например, определение состояния может быть определено на этапе 350 способа, но последующий переход может указывать, что переход в предыдущее состояние был некорректным. Например, последующий переход может быть либо невозможен, либо маловероятен из некорректно определенного состояния, что может инициировать пересмотр и/или возможную корректировку. Система может использовать один или более предыдущих переходов, вместе с самым последним переходом, чтобы определять и корректировать некорректно определенное состояние.
[0084] Аналогично, система может определять текущее состояние и/или корректировать предыдущее состояние, если система на мгновение теряет отслеживание либо состояния, либо перехода, или не может распознавать состояние или переход. Например, система может определять с помощью предыдущей информации датчика, что она находится в гипотетическом состоянии S1, за которым следует неопределенный переход T? в новое неопределенное состояние S?. Последующий известный переход T2 приводит в результате к определенному состоянию S3, что означает, что предыдущий неопределенный переход T? в состояние S? должен был быть переходом T1 в состояние S2. Полученная информация может быть использована для самообучения, и/или чтобы уточнять или иначе определять набор калибровочных данных.
[0085] Таким образом, на этапе 360 способа на фиг. 3, система обнаруживает второй переход ротового чистящего устройства от одного состояния к другому состоянию. Например, идентификатор движения может обнаруживать перемещение от одной стороны рта к другой стороне, вращение от внутренней стороны рта к внешней стороне рта, или и перемещение, и вращение. Гироскоп, акселерометр, магнетометр и/или другие датчики идентификатора 28 движения отправляют информацию контроллеру 30 непрерывно или периодически, и изменения в этой информации могут быть интерпретированы как переход, включающий в себя, но не только, перемещение, вращение и/или другие движения или переходы. Согласно варианту осуществления, контроллер интерпретирует информацию от идентификатора 28 движения как переход на основе сравнения с калибровочными данными, сравнения с предварительно определенными или предварительно запрограммированными данными и/или другими данными. Этапы 340, 350 и 360 могут быть повторены в течение всего хода сеанса чистки щеткой.
[0086] Согласно другому варианту осуществления, способ использует только данные о переходе, чтобы отслеживать движение и определять состояние ротового чистящего устройства. Например, когда обнаруживается переход, который обязательно определяет состояние, в которое ротовое чистящее устройство было перемещено или сейчас находится, тогда необходимы только данные о переходе. В сценарии, когда переход определяет два или более возможных состояния, может быть необходимо либо полагаться на другие данные датчика, либо использовать предыдущий и/или последующий переход, чтобы определять предыдущее состояние.
[0087] На этапе 370 способа система использует определения состояния, или только данные о переходе, как описано выше, полученные в течение сеанса чистки щеткой, чтобы оценивать сеанс чистки щеткой. Согласно варианту осуществления, система хранит информацию об определениях состояния, полученных в течение сеанса чистки щеткой, для того, чтобы создавать или иначе выполнять оценку, либо сейчас, либо в некоторый момент в будущем. Согласно другому варианту осуществления, система хранит информацию о множестве сеансов чистки щеткой, чтобы накапливать данные со временем, включающие в себя улучшение во времени чистки щеткой, технике или другой показатель, а также отсутствие улучшения.
[0088] Например, одной целью оценки сеанса чистки щеткой может быть отслеживание интервала времени, которое пользователь тратит на очистку щеткой каждого местоположения. Если суммарное рекомендуемое время чистки щеткой равно двум минутам, например, каждая из двенадцати областей, идентифицированных на фиг. 4, должна быть очищена приблизительно за десять секунд. Система может сравнивать отслеживаемые состояния с таймером, часами или таблицей, чтобы определять, какие области были надлежащим образом почищены, и какие области не были надлежащим образом почищены.
[0089] Согласно варианту осуществления, система может использовать другие показатели оценки для сеанса чистки щеткой. Например, другой показатель может быть расстоянием, проходимым в каждой области. Это может требовать знания размера челюсти, который может быть извлечен, например, либо из сеанса калибровки, либо обычной чистки щеткой. Другой показатель может быть распространением сигналов в одной области. Например, если пользователь удерживает щетку только в одном местоположении, распространение будет очень небольшим. Когда пользователь выполняет перемещение в одной области, таким образом, охватывая ее более надлежащим образом, распространение будет больше и более соответствующим калибровочным кривым, которые также являются более широкими. Согласно варианту осуществления, система может использовать множество показателей, чтобы оценивать сеанс чистки щеткой многомерным образом.
[0090] На необязательном этапе 375 способа система определяет, кто использовал щетку во время сеанса чистки щеткой. Система может затем необязательно ассоциировать информацию с пользователем и/или учетной записью пользователя. Например, согласно варианту осуществления, система использует наблюдаемый порядок определений состояний, чтобы определять, кто использовал щетку во время сеанса чистки щеткой. Может быть резонно предположено, что большинство пользователей будут чистить щеткой свои зубы в идентичной или аналогичной манере во время сеансов чистки щеткой. Соответственно, однажды определенный порядок или манера ассоциируется с конкретным пользователем и/или учетной записью пользователя, последующие сеансы чистки щеткой довольно близки к сохраненному или ассоциированному порядку или манере. Определение того, является ли сеанс достаточно близким к предыдущему сеансу, может быть определено посредством определения порогового значения или вероятности, например.
[0091] На этапе 380 способа оценка сеанса чистки щеткой может быть сообщена. Например, система может сообщать информацию пользователю о том, какие области были надлежащим образом почищены, и какие области не были надлежащим образом почищены. Это может быть выполнено с помощью дисплея, такого как дисплей с восьмью или двенадцатью целевыми областями и визуальным индикатором того, какие области были надлежащим образом почищены, какие области не были надлежащим образом почищены, и/или обеих. Согласно варианту осуществления, система может предоставлять данные отслеживания в реальном времени и определения местоположения пользователю или удаленной системе. Например, система может передавать данные отслеживания в реальном времени и определения местоположения компьютеру через проводное или беспроводное сетевое соединение. В качестве другого примера, система может передавать сохраненные данные отслеживания и определения местоположения компьютеру через проводное или беспроводное сетевое соединение. Таким образом, система может передавать информацию об одном сеансе чистки щеткой и/или множестве сеансов чистки щеткой непосредственно медицинскому работнику, такому как стоматолог или стоматолог-гигиенист.
[0092] Обращаясь к фиг. 8, в одном варианте осуществления, это блок-схема последовательности операций способа 800 для отслеживания перемещения устройства в заданном пространстве с помощью модели на основе закона Фиттса. На этапе 810 способа предоставляется ротовое чистящее устройство 10. Ротовое чистящее устройство может быть любым из вариантов осуществления, описанных или иначе предоставленных в данном документе. Например, согласно одному варианту осуществления, ротовое чистящее устройство 10 включает в себя фрагмент 12 корпуса, элемент 14 головки щетки с щетинистой поверхностью 18, идентификатор 28 движения и контроллер 30 с процессором 32 и памятью 34. Множество других вариантов осуществления ротового чистящего устройства 10 также возможны.
[0093] На необязательном этапе 820 способа система 200 может быть откалибрована. Калибровка может содержать, например, определение переменных W, a и/или b, которое может быть выполнено на производстве или пользователем. Во время сеанса калибровки, например, предназначенная область чистится щеткой, и мгновенные данные датчика аннотируются и сохраняются. Согласно варианту осуществления, калибровка может быть выполнена отдельным пользователем, поскольку челюсть является уникальной. Это может быть выполнено несколькими способами. Например, пользователь может просто использовать устройство, и система может воссоздавать карту челюсти, регистрируя формы и пограничные условия, такие как точка поворота на задних коренных зубах. Согласно другому способу пользовательской калибровки пользователь направляется через сеанс чистки щеткой, в котором указывается, где он должен чистить щеткой, так что система может сопоставлять местоположение со своими данными датчика, также как обучать систему пользовательской манере движения.
[0094] Согласно варианту осуществления, этап калибровки пропускается. Вместо этого, ротовое чистящее устройство вырабатывает набор калибровочных данных в течение одного или более сеансов чистки щеткой, сравнивая данные между этими сеансами. Способ самообучения может также быть использован, чтобы дополнять, улучшать или иначе корректировать заводскую или пользовательскую калибровку.
[0095] На этапе 830 способа ротовое чистящее устройство позиционируется во рту в первом местоположении, и пользователь начинает чистить щеткой свои зубы.
[0096] На этапе 840 способа идентификатор 28 движения получает данные датчика, и система использует данные датчика, чтобы определять приблизительное местоположение устройства во рту. Приблизительное местоположение является состоянием, сегментом или другим показателем более высокого уровня для местоположения во рту. Согласно варианту осуществления, система использует вероятностную графическую модель, описанную или иначе представленную в данном документе, чтобы определять, какой фрагмент рта чистится щеткой, включающий в себя, но не только позиции, изложенные в таблице 1. Другие способы идентификации состояния, сегмента или другого показателя верхнего уровня для местоположения во рту также возможны.
[0097] На этапе 850 способа, с помощью информации о приблизительном местоположении устройства во рту, система может использовать модель на основе закона Фиттса, чтобы определять число зубов, на которое устройство было смещено, с помощью уравнения 4:
W * 2((MT - a)/b)-1=D (уравнение 4)
где параметры W, a и b являются известными, а MT является наблюдаемым интервалом времени. Время MT наблюдения может быть получено посредством измерения интервала времени между тем, когда движение начинается и заканчивается, когда движение обнаруживается посредством идентификатора 28 движения. Измеренное время MT коррелируется с числом зубов между началом и окончанием движения, поскольку число зубов, охваченных в одном движении, экспоненциально соотносится со временем, необходимым, чтобы совершать движение.
[0098] Согласно варианту осуществления, информация о числе зубов между началом и окончанием движения, т.е., число зубов, на которое устройство было перемещено, может быть использовано системой в различных целях. Например, информация может быть использована, чтобы определять, какие зубы были очищены во время движения. Согласно другому варианту осуществления, информация может быть использована, чтобы инициировать действие посредством ротового чистящего устройства, такое как воздействие на воздушный поток устройства, распыление жидкости или множество других действий.
[0099] На этапе 860 способа на фиг. 8 система определяет второе местоположение ротового чистящего устройства 10 во рту. Например, согласно варианту осуществления, идентификатор движения может обнаруживать перемещение от одной стороны рта к другой стороне, вращение от внутренней стороны рта к внешней стороне рта или и перемещение, и вращение. Гироскоп, акселерометр, магнетометр и/или другие датчики идентификатора 28 движения отправляют информацию контроллеру 30 непрерывно или периодически, и изменения в этой информации могут быть интерпретированы как переход, включающий в себя, но не только, перемещение, вращение и/или другие движения или переходы. Согласно варианту осуществления, контроллер интерпретирует информацию от идентификатора 28 движения как переход на основе сравнения с калибровочными данными, сравнения с предварительно определенными или предварительно запрограммированными данными и/или другими данными. Этапы 850, 860 и 870 могут быть повторены в течение всего хода сеанса чистки щеткой.
[00100] Согласно другому варианту осуществления способа, который может быть использован отдельно или вместе с этапами выше, модель на основе закона Фиттса используется, чтобы определять, какой из множества возможных переходов вероятно должен произойти, на основе принятых данных датчика. Например, на этапе 845, идентификатор движения ротового чистящего устройства обнаруживает переход от одного сегмента рта к другому сегменту рта. Например, идентификатор движения может обнаруживать перемещение от одной стороны рта к другой стороне, вращение от внутренней стороны рта к внешней стороне рта или и перемещение, и вращение. Гироскоп, акселерометр, магнетометр и/или другие датчики идентификатора 28 движения отправляют информацию контроллеру 30 непрерывно или периодически, и изменения в этой информации могут быть интерпретированы как переход, включающий в себя, но не только, перемещение, вращение и/или другие движения или переходы.
[00101] На этапе 855 этого варианта осуществления способа, с помощью информации датчика об обнаруженном переходе и наблюдаемого интервала времени для этого перехода, система может использовать модель на основе закона Фиттса, чтобы определять, какой из множества возможных переходов вероятно произошел, с помощью уравнения 4 выше, где параметры W, a и b являются известными, а MT является наблюдаемым интервалом времени. Наблюдаемое время MT получается посредством измерения интервала времени между временем, когда переход начался, и временем, когда переход закончился, когда движение обнаруживается посредством идентификатора 28 движения. Измеренное время MT коррелируется с типом перехода, поскольку тип перехода будет связан со временем, необходимым, чтобы совершать движение перехода. Идентифицированный переход может затем быть использован для множества целей, включающих в себя уточнение других показаний местоположения. Согласно этому варианту осуществления, этапы 845, 855 и 875 могут повторяться в течение всего хода сеанса чистки щеткой.
[00102] На этапе 880 способа система использует информацию о чистке щеткой, полученную в течение сеанса чистки щеткой, чтобы оценивать сеанс чистки щеткой. Согласно варианту осуществления, система хранит информацию об отдельных зубах, очищенных в течение сеанса чистки щеткой, для того, чтобы создавать или иначе выполнять оценку, либо немедленно, либо в некоторый момент в будущем. Согласно другому варианту осуществления, система хранит информацию о множестве сеансов чистки щеткой, чтобы накапливать данные со временем, включающие в себя улучшение во времени чистки щеткой, технике или другой показатель, а также отсутствие улучшения.
[00103] Например, одной целью оценки сеанса чистки щеткой может быть отслеживание интервала времени, которое пользователь тратит на очистку щеткой каждого зуба. Если суммарное рекомендуемое время чистки щеткой равно двум минутам, например, каждый из приблизительно 32 отдельных зубов у взрослого человека должен чиститься щеткой в течение приблизительно 4 секунд. Система может сравнивать отслеживаемые состояния с таймером, часами или таблицей, чтобы определять, какие области были надлежащим образом почищены, и какие области не были надлежащим образом почищены.
[00104] На этапе 890 способа оценка сеанса чистки щеткой может быть сообщена. Например, система может сообщать информацию пользователю о том, какие зубы и/или области были надлежащим образом почищены щеткой, и какие зубы и/или области не были надлежащим образом почищены щеткой. Это может быть выполнено с помощью дисплея, такого как визуальный индикатор того, какие зубы или области были надлежащим образом почищены щеткой, какие зубы или области не были надлежащим образом почищены щеткой, и/или оба варианта. Согласно варианту осуществления, система может предоставлять данные отслеживания в реальном времени и определения местоположения пользователю или удаленной системе. Например, система может передавать данные отслеживания в реальном времени и определения местоположения компьютеру через проводное или беспроводное сетевое соединение. В качестве другого примера, система может передавать сохраненные данные отслеживания и определения местоположения компьютеру через проводное или беспроводное сетевое соединение. Таким образом, система может передавать информацию об одном сеансе чистки щеткой и/или множестве сеансов чистки щеткой непосредственно медицинскому работнику, такому как стоматолог или стоматолог-гигиенист.
[00105] Следует понимать, что все определения, задаваемые и используемые в данном документе, контролируются согласно словарным определениям, определениям в документах, включенных по ссылке, и/или обычному смыслу задаваемых терминов.
[00106] Единственное число при использовании в подробном описании и в формуле изобретения, если явно не указано иное, должно пониматься как означающие "по меньшей мере, один".
[00107] Фраза "и/или", при использовании в подробном описании и в формуле изобретения, должна пониматься как означающая "один или оба" из элементов, сочетающихся таким образом, т.е. элементов, которые совместно присутствуют в некоторых случаях и отдельно присутствуют в других случаях. Несколько элементов, перечисленных с "и/или", должны трактоваться одинаково, т.е. "одни или более" из элементов, сочетающихся таким образом. Необязательно могут присутствовать другие элементы, отличные от элементов, конкретно идентифицированных посредством выражения "и/или", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[00108] Когда используется в данном документе в спецификации и в формуле, фраза "или" должна пониматься как имеющая тот же смысл, что и "и/или", как определено выше. Например, при разделении элементов в списке "или" или "и/или" должны интерпретироваться как включающие в себя, т.е., присоединение по меньшей мере одного, а также включение в себя более чем одного, члена или списка элементов, и, необязательно, дополнительных неперечисленных элементов. Только выражения, явно указанные в противоположном смысле, такие как "только один из" или "именно один из", или, когда используется в формуле, "состоящий из", будут ссылаться на присоединение строго одного элемента из множества или списка элементов. В целом, термин "или", когда используется в данном документе, должен интерпретироваться только как указывающий исключительные альтернативы (т.е., "один или другой, но не оба"), когда ему предшествуют термины исключительности, такие как "любой", "один из", "только один из" или "исключительно один из".
[00109] Когда используется в данном документе в спецификации и в формуле, фраза "по меньшей мере, один", при ссылке на список из одного или более элементов, должна пониматься как означающая по меньшей мере один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающий в себя по меньшей мере один из каждого и каждый элемент, специально перечисленный в списке элементов, и не исключающий любые комбинации элементов в списке элементов. Это определение также обеспечивает возможность того, что необязательно могут присутствовать элементы, отличные от элементов, конкретно идентифицированных в списке элементов, к которым относится фраза "по меньшей мере, один", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[00110] Также следует понимать, что, если явно не указано иное, в любых способах, заявленных в данном документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничен порядком, в котором изложены этапы или действия способа.
[00111] В формуле изобретения, также как и в спецификации выше, все переходные фразы, такие как "содержащий", "включающий в себя", "несущий", "имеющий", "вмещающий в себя", "подразумевающий", "удерживающий", "состоящий из" и т.п. должны пониматься как неограниченные, т.е., означать "включающий в себя, но не только".
[00112] Хотя несколько изобретаемых вариантов осуществления описано и проиллюстрировано в данном документе, специалисты в данной области техники должны легко представлять себе множество других средств и/или структур для осуществления функций и/или получения результатов и/или одного или более преимуществ, описанных в данном документе, и каждое из таких изменений и/или модификаций считается в рамках объема изобретаемых вариантов осуществления, описанных в данном документе. Если обобщать, специалисты в данной области техники должны легко принимать во внимание, что все параметры, размеры, материалы и конфигурации, описанные в данном документе, имеют намерение быть примерными, и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного варианта применения или вариантов применения, для которых используются изобретаемые идеи. Специалисты в данной области техники должны признавать или иметь возможность устанавливать с помощью не более чем обычных экспериментов множество эквивалентов для конкретных изобретаемых вариантов осуществления, описанных в данном документе. Следовательно, должно быть понятно, что вышеописанные варианты осуществления представлены только в качестве примера, и что, в рамках прилагаемой формулы изобретения и эквивалентов к ней, изобретенные варианты осуществления могут быть применены на практике иначе, чем конкретно описано и заявлено. Изобретаемые варианты осуществления настоящего раскрытия сущности направлены на каждый отдельный признак, систему, изделие, материал, комплект и/или способ, описанный в данном документе. Помимо этого, любая комбинация двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно несогласованными, включается в рамки изобретаемого объема настоящего раскрытия сущности.
Группа изобретений относится к медицинской технике, а именно к средствам обеспечения методики чистки ротовой полости. Способ для определения местоположения ротового чистящего устройства во рту пользователя содержит этапы, на которых определяют на основе информации датчика, принятой от идентификатора, первое местоположение ротового чистящего устройства во рту пользователя и измеряют интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении. С помощью закона Фиттса и измеренного прошедшего интервала времени вычисляют число зубов, на которое ротовое чистящее устройство было смещено в течение прошедшего интервала времени. Затем определяют на основе первого местоположения и числа зубов, какие из зубов пользователя были включены в перемещение. Второй вариант выполнения способа содержит этапы, на которых определяют на основе информации датчика, принятой от идентификатора движения, первое местоположение ротового чистящего устройства во рту пользователя. После этого обнаруживают с помощью информации датчика, принятой от идентификатора, переход ротового чистящего устройства от первого местоположения ко второму местоположению во рту пользователя. Затем вычисляют с помощью закона Фиттса и прошедшего интервала времени для перехода вероятность интервала времени для перехода из множества возможных переходов в течение прошедшего интервала времени. После чего определяют на основе первого местоположения и вычисленной вероятности перехода второе местоположение. Способы осуществляются посредством ротового чистящего устройства, которое содержит идентификатор движения и контроллер, который соединен с идентификатором движения, при этом контроллер конфигурируется таким образом, чтобы выполнять указанные способы. Использование группы изобретений обеспечивает повышение точности отслеживания расположения ротового чистящего устройства во рту для предоставления оценки пользовательской методики чистки. 3 н. и 12 з.п. ф-лы, 8 ил., 1 табл.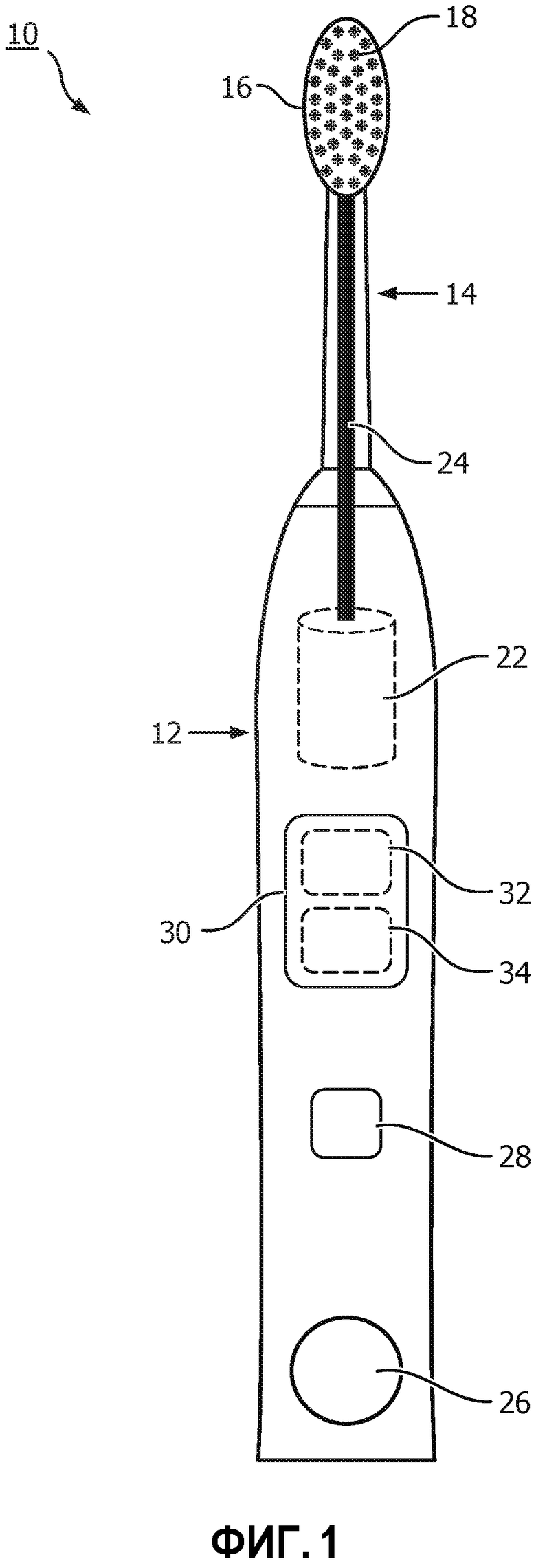
1. Способ (800) для определения местоположения ротового чистящего устройства во рту пользователя, при этом способ содержит этапы, на которых:
определяют (840), на основе информации датчика, принятой от идентификатора (28) движения, первое местоположение ротового чистящего устройства во рту пользователя;
измеряют, с помощью информации датчика, принятой от идентификатора движения, интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении;
вычисляют, с помощью закона Фиттса и измеренного прошедшего интервала времени, число зубов, на которое ротовое чистящее устройство было смещено в течение прошедшего интервала времени; и
определяют, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было смещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
2. Способ по п. 1, в котором упомянутый этап определения содержит этап, на котором определяют, какие из зубов пользователя были почищены посредством ротового чистящего устройства во время перемещения.
3. Способ по п. 1, в котором первое местоположение является сегментом рта пользователя.
4. Способ по п. 1, в котором упомянутый закон Фиттса содержит формулу
W * 2((MT - a)/b)-1=D,
где MT является прошедшим интервалом времени, W, a и b являются предварительно определенными значениями и D является расстоянием перемещения в первом местоположении.
5. Способ по п. 4, дополнительно содержащий этап предоставления (820) калибровочных данных для ротового чистящего устройства, калибровочные данные содержат одно или более значений для W, a и b.
6. Способ по п. 1, дополнительно содержащий этап оценки (880) сеанса чистки щеткой.
7. Способ по п. 6, в котором упомянутая оценка содержит информацию о том, какие из зубов пользователя были очищены во время сеанса чистки щеткой.
8. Ротовое чистящее устройство (10), содержащее:
идентификатор (28) движения; и
контроллер (30) в соединении с идентификатором движения, при этом контроллер конфигурируется, чтобы: (i) определять, на основе информации датчика, принятой от идентификатора движения, первое местоположение ротового чистящего устройства во рту пользователя; (ii) измерять, с помощью информации датчика, принятой от идентификатора движения, интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении; (iii) вычислять, с помощью закона Фиттса и измеренного прошедшего интервала времени, число зубов, очищенных щеткой в течение прошедшего интервала времени; и (iv) определять, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
9. Ротовое чистящее устройство по п. 8, в котором упомянутый закон Фиттса содержит формулу
W * 2((MT - a)/b)-1=D,
где MT является прошедшим интервалом времени, W, a и b являются предварительно определенными значениями и D является расстоянием перемещения в первом местоположении.
10. Ротовое чистящее устройство по п. 8, в котором контроллер дополнительно содержит калибровочные данные для ротового чистящего устройства.
11. Ротовое чистящее устройство по п. 8, в котором контроллер дополнительно конфигурируется, чтобы оценивать сеанс чистки щеткой.
12. Ротовое чистящее устройство по п. 8, дополнительно содержащее модуль (38) связи, при этом ротовое чистящее устройство конфигурируется, чтобы передавать, через модуль связи, данные датчика от идентификатора движения; и
удаленное серверное устройство в соединении с ротовым чистящим устройством, содержащее процессор (44), при этом процессор конфигурируется, чтобы: (i) определять, на основе информации датчика, принятой от идентификатора движения, первое местоположение ротового чистящего устройства во рту пользователя; (ii) измерять, с помощью информации датчика, принятой от идентификатора движения, интервал времени, проходящего между началом и прекращением перемещения ротового чистящего устройства во рту пользователя в первом местоположении; (iii) вычислять, с помощью закона Фиттса и измеренного прошедшего интервала времени, число зубов, очищенных щеткой в течение прошедшего интервала времени; и (iv) определять, на основе первого местоположения и числа зубов, на которое ротовое чистящее устройство было перемещено в течение прошедшего интервала времени, какие из зубов пользователя были включены в перемещение.
13. Ротовое чистящее устройство по п. 12, в котором упомянутый закон Фиттса содержит формулу
W * 2((MT - a)/b)-1=D,
где MT является прошедшим интервалом времени, W, a и b являются предварительно определенными значениями и D является расстоянием перемещения в первом местоположении.
14. Способ (800) для определения местоположения ротового чистящего устройства во рту пользователя, при этом способ содержит этапы, на которых:
определяют (840), на основе информации датчика, принятой от идентификатора (28) движения, первое местоположение ротового чистящего устройства во рту пользователя;
обнаруживают (845), с помощью информации датчика, принятой от идентификатора движения, переход ротового чистящего устройства от первого местоположения ко второму местоположению во рту пользователя;
вычисляют вероятность перехода, с помощью закона Фиттса и прошедшего интервала времени для перехода, вероятность которого из множества возможных переходов произошла в течение прошедшего интервала времени; и
определяют, на основе первого местоположения и вычисленной вероятности перехода, второе местоположение.
15. Способ по п. 14, в котором местоположение является сегментом рта.
| US 2015044629 A1, 12.02.2015 | |||
| CN 204501067 U, 29.07.2015 | |||
| US 2010015589 A1, 21.01.2010 | |||
| ЭЛЕКТРИЧЕСКАЯ ЗУБНАЯ ЩЕТКА | 2010 |
|
RU2518532C2 |

