Область техники
Данное изобретение касается рабочего прибора для перемешивания или измельчения пищевых продуктов, такого как, например, погружной миксер.
Уровень техники
Обычные рабочие приборы для перемешивания или измельчения пищевых продуктов известны, например, из публикации WO 96/10944 A1 или EP 0 724 857 A1. Такие рабочие приборы используются, в частности, при повседневном приготовлении продуктов питания, чтобы, например, измельчить или перемешать пищевые продукты. Одним из видов рабочих приборов являются погружные миксеры, которые нашли широкое применение в быту, а также на профессиональных предприятиях общественного питания. Обычно такие погружные миксеры имеют корпус двигателя, к которому примыкает вытянутая в длину часть корпуса, так называемая ножка, которая, в свою очередь, на своем конце переходит в средство защиты с открытым внизу концом, так называемый купол. В корпусе двигателя расположен приводной двигатель, приводящий в движение направленный через ножку рабочий вал, на конце которого в зоне купола закреплена обычно рабочая часть, например, резательный нож в форме быстро вращающегося лезвия, чтобы смешивать жидкости и измельчать твердые блюда.
Как правило, ножка принимает на себя адаптацию корпуса двигателя к модулю ножки и, зачастую, осевую, а также радиальную установку вала, необходимого для привода ножа. Купол, в первую очередь, имеет защитную функцию, чтобы затруднить попадание пользователя под лезвие. Кроме того, он служит определению фиксированного расстояния между лезвием и дном посуды для обработки (кастрюля, чаша для сбивания и проч.), оптимизации потоков вокруг лезвия, а также в качестве защиты от брызг при погружении в жидкости. При этом купол имеет такие размеры, чтобы он полностью окружал режущий нож и, смотря по направлению оси рабочего вала, выдавался на определенное расстояние вперед над концом вала, или соответственно, режущего ножа.
У этих имеющихся в продаже приборов лезвия всегда размещены в определенном горизонтальном положении внутри купола. Лезвия прочно смонтированы на валу и, зачастую, установлены фиксировано радиально и аксиально. Таким образом, получается доступное ножу пространство обработки, ограниченное в пространстве. С помощью «обычного» движения пользователя вверх и вниз всего погружного миксера это пространство становится больше лишь несущественно. Наконец при установке купола на дно пространство под ножом не досягаемо для последнего. Тогда измельчение происходит, как правило, только лишь с помощью эффектов течений. При условии, что вокруг разрезаемого материала находится достаточно жидкости, он течением протягивается через обрабатываемое пространство и таким образом измельчается.
Кроме того, у известных погружных миксеров во время работы ножка может время от времени присасываться к дну емкости, что может сильно мешать пользователю, поскольку требуется большее усилие, чтобы снова отделить ее от дна. Фактически это обусловлено положением режущего ножа внутри купола, поскольку рациональная для работы геометрия ножа обеспечивает «эффект пропеллера» и способствует присасыванию всей ножки к обрабатываемому дну.
Чтобы избежать соответствующих недостатков, в DE 197 50 813 A1 был предложен погружной миксер с упруго деформируемым куполом. Другие применения показаны в DE 195 04 638 A1. Другой погружной миксер известен из публикации US 6,398,403 B1.
Далее в WO 2016/169883 A1 заявитель предлагает рабочий прибор, у которого рабочая часть подвижна по отношению к средству защиты.
Изобретатель заметил, что, когда обрабатываются, например, сравнимо твердые пищевые продукты (например, сырая морковь), то кусочки пищевых продуктов движутся прямо под стенки купола или между куполом и дном емкости для обработки и там могут застревать. В такой ситуации лезвие больше не может достичь пищи, поэтому оно больше не может перерабатывать пищевые продукты. Далее при опытах было установлено, чтобы убедиться, что такие остатки пищевых продуктов могут быть достигнуты, что должна быть приложена сила вплоть до 160 Ньютонов, чтобы стенку купола вдавить достаточно глубоко в пищу, так чтобы нож мог достичь пищи. Для многих пользователей это невозможно.
В соответствии с этим было установлено, что пользователи склоняются к тому, чтобы вытащить рабочий прибор из продукта и снова погрузить в него в другом месте. Другие опытные пользователи склоняются к тому, чтобы весь рабочий прибор или, соответственно, весь миксер повернуть или вращать вокруг вертикальной оси, в то время, когда они опускают рабочий прибор, чтобы обеспечить, чтобы твердые куски пищевых продуктов двигались от своего места под стенками купола. Однако это ведет к тому, что пользователь должен повернуть всю руку, одновременно прилагая (значительное) вертикальное давление. Для пользователя это затруднительно, и, кроме того, выяснилось, что соответствующие результаты обработанного таким образом продукта значительно ухудшились.
Далее изобретатель заметил, что описанная в WO 2016/169883 A1 система ведет именно к тому, что нож может находиться ближе к краю купола, что в некоторых ситуациях может уменьшить названные выше проблемы. Однако также было установлено, что все-таки возникают ситуации, в которых твердые куски пищевых продуктов, находящиеся прямо под стенками купола, не могут быть досягаемы ножом, и что необходимо очень высокое давление или поворот вручную прибора, чтобы достичь желаемой цели.
В соответствии с этим, задачей изобретения является смягчить, по меньшей мере, некоторые из выше названных проблем.
Изобретение определяется пунктом 1 формулы изобретения. Предпочтительные формы исполнения описываются в зависимых пунктах.
Согласно изобретению рабочий прибор имеет для перемешивания или измельчения пищевых продуктов приводимый в движение двигателем поворотный вал, на противоположном двигателю конце которого предусмотрена рабочая часть. Такой рабочий прибор может представлять погружной миксер или ручном приборедля перемешивания. Двигателем обычно является электродвигатель, однако может идти речь о любом другом виде двигателя. Предусмотренная на двигателе рабочая часть может представлять собой, например, лезвие, нож, мешалку или месильный инструменте (как, н-р, месильный крюк). Вообще говоря, здесь может идти речь о любом виде рабочей части, которая может применяться при переработке пищевых продуктов и которая для этого используется с возможностью вращения или, соответственно, колебательно-вращательного движения.
Рабочий прибор имеет внутренний и внешний модуль, которые, по меньшей мере, частично, определяют корпус («ножку») рабочего прибора. Этот внутренний и внешний модуль представляет собой составляющие корпуса. Обычно они определяют продолговатую внешнюю форму рабочего прибора. Внутренний модуль предусмотрен с возможностью движения внутри внешнего модуля и может перемещаться относительно внешнего модуля, как это описывается также в WO 2016/169883 A1. Во внутреннем модуле установлен вал с возможностью вращения, при этом рабочая часть находится на внешней стороне рабочего прибора, поэтому она может взаимодействовать с пищевыми продуктами. Говоря иначе, рабочая часть свободна.
Однако рабочая часть предусмотрена внутри средства защиты, которое предусмотрено на внешнем модуле. Это средство защиты (которое также обозначается как «купол») представляет собой устройство, служащее для предотвращения случайного попадания во вращающуюся рабочую часть. Такой купол также описан, например, в WO 2016/169883 A1. Это средство защиты предусмотрено на внешнем модуле, это значит, оно закреплено предпочтительно жестко на этом внешнем модуле. Обычно средство защиты может быть выполнено как одна деталь или из нескольких деталей, но при этом жестко соединено с внешним модулем. Благодаря этому достигается то, что поворот вращаемого вала относительно внешнего модуля неизбежно ведет к повороту вращаемого вала относительно средства защиты.
Внутренний модуль перемещается относительно внешнего модуля аксиально в направлении вала. При таком движении внутренний модуль вместе с установленным в нем валом аксиально сдвигается относительно внешнего модуля. Внутренний модуль установлен относительно внешнего модуля так, что аксиальное движение внутреннего модуля по отношению к внешнему модулю дополнительно приводит к вращательному движению внешнего модуля относительно внутреннего модуля. С помощью соответствующей установки внутреннего модуля относительно внешнего модуля может достигаться поворот внутреннего модуля относительно внешнего модуля с помощью аксиального движения внутреннего модуля относительно внешнего модуля. Тогда это приводит к тому, что средство защиты также поворачивается относительно рабочей части и по отношению к закрепленном на внутреннем модуле двигателю, или соответственно, части рукоятки.
По сравнению с WO 2016/169883 A1 это приводит к тому, что телескопическое движение вала замещается на движение по спирали. Если пользователь оказывает давление на рабочий прибор, которое направлено аксиально, то рабочий прибор сжимается, что ведет к тому, что рабочая часть движется вертикально внутри средства защиты, в то время как одновременно само средство защиты выполняет вращение вокруг основной оси рабочего прибора. Это ведет к тому, что все твердые куски пищевых продуктов, которые застряли между средством защиты и емкостью, в которой используется этот рабочий прибор, «соскребаются» или, соответственно, выкручиваются наружу или вытесняются наружу, что приводит к тому, что рабочая часть также может достигать этих кусков продукта. То же самое действительно, кроме прочего, и для остатков, застрявших на внутренней стороне купола.
Благодаря изобретению это вращательное движение производится автоматически, без необходимости со стороны пользователя выполнять что-либо «особенное». Это вращательное движение производится непосредственно с помощью аксиального движения, что является обычным и интуитивным направлением движения для соответствующего рабочего прибора, такого как, например, погружной миксер. Соответственно этому сокращаются необходимые усилия, и также не обладающие опытом пользователи могут достигать лучших результатов при перемешивании и измельчении именно твердых пищевых продуктов.
Является предпочтительным, когда рабочий прибор также имеет элемент предварительного зажима (например, в форме пружины), который противодействует перемещению внутреннего модуля относительно внешнего модуля в осевом направлении. Соответствующее устройство предварительного зажима ведет к тому, что рабочий прибор имеет определенное положение покоя, которое он принимает, когда на внутренний модуль и на внешний модуль не воздействует никакая аксиальная сила. Таким образом, соответствующий рабочий прибор удобен для пользователя и требует менее тщательного обслуживания, поскольку внутренний модуль и внешний модуль в состоянии покоя имеют мало свободного хода. Далее для возврата в исходное положение не требуется отдельной манипуляции, поскольку сама пружина служит возвратным элементом. Особенно предпочтительно, если этот элемент предварительного зажима работает таким образом, чтобы в положении покоя рабочая часть имела максимальный отступ от выреза в куполе. Благодаря этому уменьшается вероятность того, что пользователь нечаянно соприкоснется с рабочей частью, и присасывание к дну емкости будет сведено к минимуму.
Далее предпочтительно, если максимальный аксиальный «ход» внутреннего модуля относительно внешнего модуля, и, тем самым, максимальный аксиальный ход рабочего прибора составит максимально 15 мм.
Предпочтительно, чтобы установка внутреннего модуля относительно внешнего модуля имела один или несколько выступов на одном модуле среди внутреннего модуля и внешнего модуля и одну или несколько соответствующих направляющих соответственно на другом модуле среди внутреннего модуля и внешнего модуля, которые соответственно направляют один или несколько выступов. Это означает, один или несколько выступов находятся в зацеплении с соответствующей направляющей. Соответствующая направляющая может быть выполнена, например, с помощью углубления в одном из соответствующих модулей. Однако также возможно, чтобы были предусмотрены направляющие, идущие от соответствующей поверхности модуля.
Одна или несколько направляющих простираются вдоль соответствующего модуля так, что они имеют вдоль своего направления протяженности как осевую протяженность, так и протяженность по периметру. Это ведет к тому, что движение одного или нескольких выступов вдоль направляющей(щих) ведет к вращательному движению внешнего модуля относительно внутреннего модуля. Соответствующая форма исполнения рабочего прибора может быть легко реализована и ведет к прочному и имеющему долгий срок службы рабочему прибору.
В соответствии с этим является предпочтительным, чтобы направляющая имела последовательность чередующихся между собой аксиально ориентированных участков и наклонных участков. Соответствующий принцип направляющих известен, например, по имеющейся в продаже шариковой ручке. Это ведет к тому, что первое аксиальное перемещение внутреннего модуля относительно внешнего модуля ведет к повороту рабочей части с одновременным аксиальным движением рабочей части, в то время как высвобождение ведет к тому, что рабочая часть возвращается лишь аксиально. Сформированная соответствующе рабочая часть легко насаживается и оказалась на практике практичной и простой в использовании.
Далее является предпочтительным, чтобы установка внутреннего модуля относительно внешнего модуля имела один или несколько соединительных элементов. Эти соединительные элементы имеют соответственно первую точку соединения с внутренним модулем и вторую точку соединения с внешним модулем, в которых (точках) они установлены соответственно внутренним или, соответственно, внешним модулем. Первая точка соединения и вторая точка соединения отстоят друг от друга. Один или несколько соединительных элементов имеют достаточную жесткость и выполнены так, чтобы воздействие аксиальном давлением на внутренний модуль вело к поворотному движению одного или нескольких соединительных элементов, которое приводит к вращательному движению внешнего модуля относительно внутреннего модуля. Соответствующие соединительные элементы легко реализуются и показали себя также требующими менее интенсивного технического обслуживания и прочными.
Является предпочтительным, чтобы соединительные элементы имели планки, закрепленные на внутреннем и внешнем модуле, при этом они установлены с возможностью поворота. Соответствующая форма исполнения легко реализуема.
Далее является предпочтительным, чтобы соединительные элементы имели пластинчатые пружины, закрепленные на внутреннем и внешнем модуле. Эти пластинчатые пружины имеют то преимущество, что не требуется отдельного возвратного элемента или таковой может быть выполнен более слабым, поскольку пластинчатые пружины принимают на себя эту функцию возврата, по меньшей мере, частями.
Следующей предпочтительной формой исполнения является то, что на одном модуле из внешнего и внутреннего модуля предусмотрены одно или несколько эксцентрично установленных колес, которые могут приходить в соприкосновение с поверхностью прилегания или соприкасаются с нею, которая (поверхность) предусмотрена соответственно на другом модуле среди внутреннего и внешнего модуля и которая простирается так, чтобы ее протяжение имело составляющую, которая была вдоль направления по окружности. При этом колеса и поверхность прилегания выполнены так, что при аксиальном перемещении внутреннего модуля относительно внешнего модуля эти колеса надавливались на поверхность прилегания и вращались на ней вследствие эксцентрической установки. С помощью этого вращения колеса воздействуют силой, направленной вдоль направления по окружности, на поверхность прилегания, которая (сила) ведет к вращательному движению внешнего модуля относительно внутреннего модуля. Такая форма исполнения рабочего прибора сравнительно прочная в отношении случайных поворотов внутреннего модуля относительно внешнего модуля, поэтому менее вероятно, что такой рабочий прибор из-за недолжного использования будет поврежден.
При этом является предпочтительным, чтобы колесами были шестерни, и чтобы поверхность прилегания имела зубчатые элементы, которые находятся в зацеплении или могут приходить в зацепление с зубьями шестерни. При соответствующем распределении сил могут быть очень хорошо распределены сравнительно большие силы.
Альтернативно этому достаточно, если колеса и поверхность прилегания имеют фрикционное соединение или могут входить в него. В этом отношении является преимуществом, что такое исполнение колес и поверхности прилегания при любой ориентации колес и поверхности прилегания может приводить к распределению силы, что отличается по сравнению с формой исполнения, при которой колеса имеют шестерни и поверхность прилегания - зубчатые элементы. В этом отношении такой рабочий прибор более удобен в использовании.
Далее является предпочтительным, чтобы внутренний модуль и внешний модуль были соединены друг с другом резьбой, выполненной таким образом, что это приводит при аксиальном движении внутреннего модуля относительно внешнего модуля к вращательному движению внешнего модуля относительно внутреннего модуля. Соответствующее оснащение рабочего прибора может быть легко реализовано и является надежным, поскольку такой рабочий прибор имеет лишь немного свободного хода. При этом является предпочтительным, чтобы резьба была шариковой винтовой парой, резьбой с накатом или резьбой со скольжением или имела таковую. Соответствующие резьбы характеризуются хорошо и в этом отношении хорошо реализуемы. Шариковая винтовая пара имеет особо легкий ход и поэтому особо предпочтительна.
Краткое описание чертежей
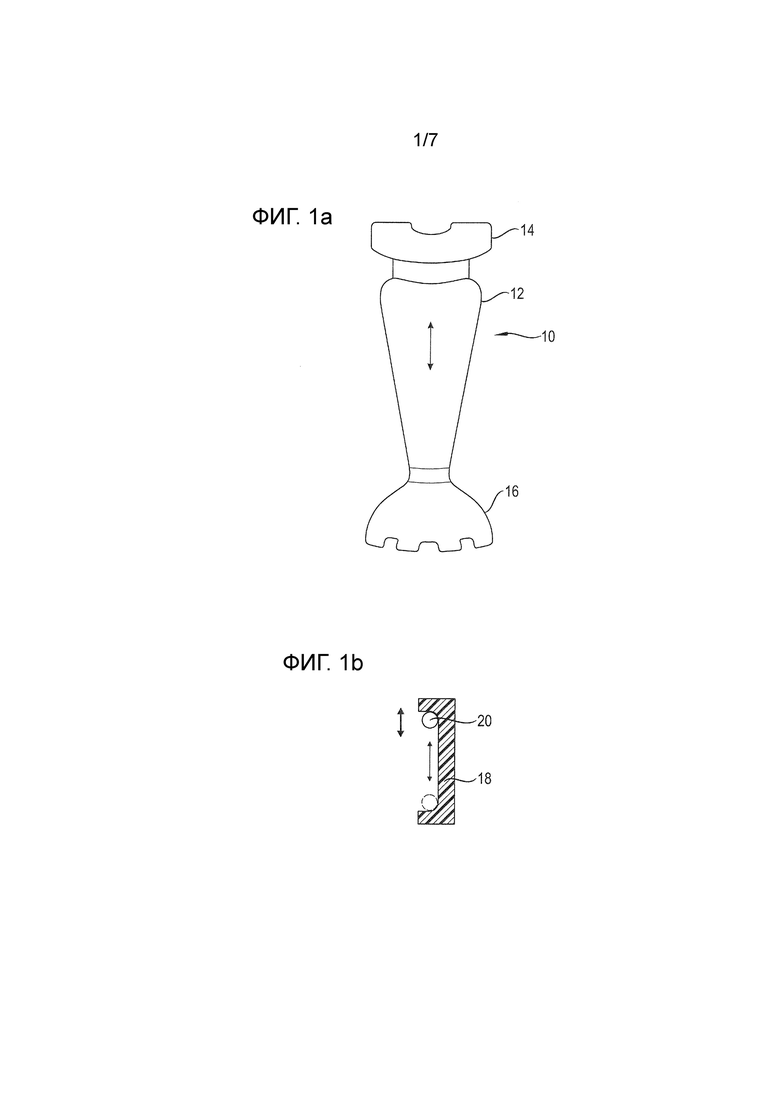
Фигуры 1а и 1b показывают рабочий прибор согласно уровню техники.
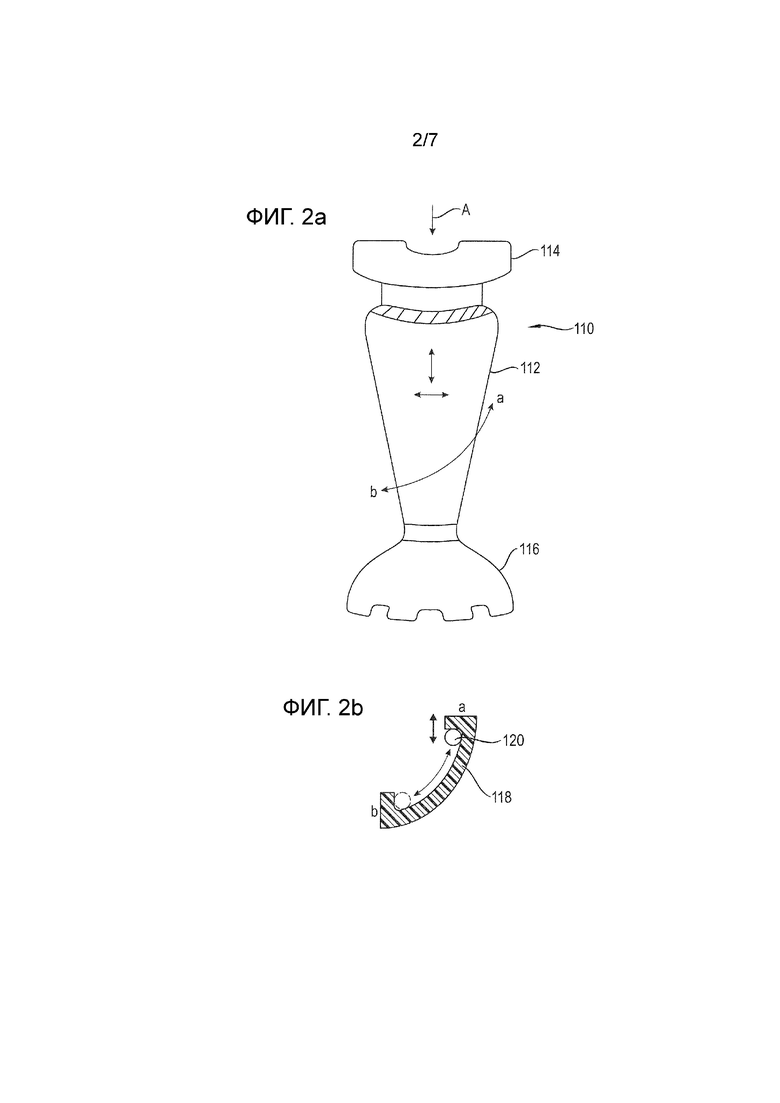
Фигуры 2a и 2b показывают принцип работы соответствующего изобретению рабочего прибора согласно первой форме исполнения.
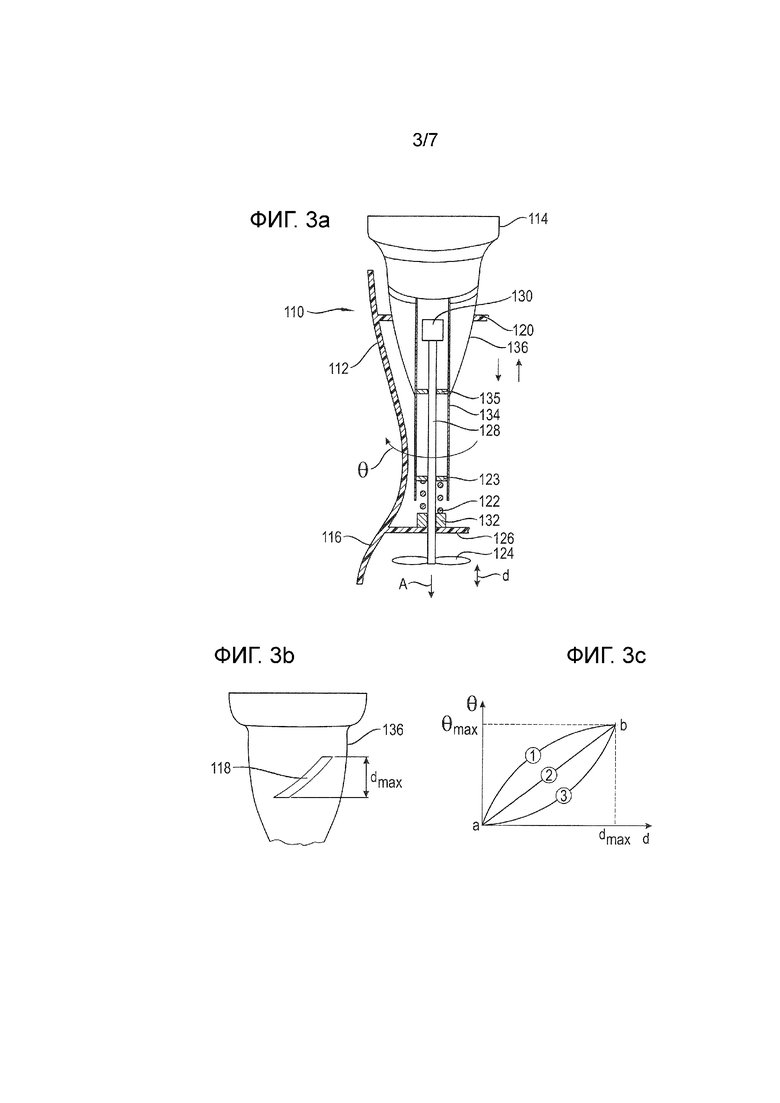
Фигуры 3а - 3c иллюстрируют рабочий прибор согласно первой форме исполнения.
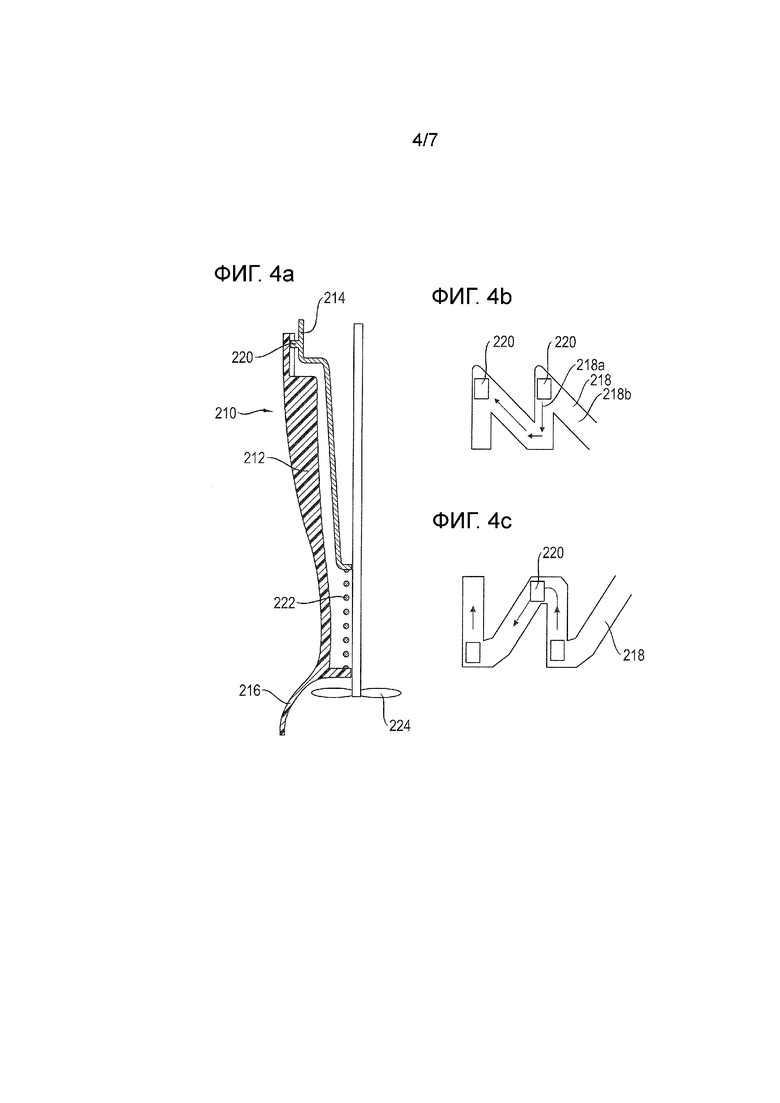
Фигура 4 показывает рабочий прибор согласно второй форме исполнения.
Фигура 5 показывает рабочий прибор согласно третьей форме исполнения.
Фигура 6 показывает рабочий прибор согласно четвертой форме исполнения.
Фигура 7 показывает рабочий прибор согласно пятой форме исполнения.
Фиг. 1а показывает общий вид рабочего прибора согласно уровню техники, как описывается, например, в WO 2016/169883 A1.
Аксиальное движение (обозначено стрелкой) внутреннего модуля 14 относительно внешнего модуля 12 приводит к тому, что предусмотренное внутри средства 16 защиты лезвие (не изображено) рабочего прибора 10 перемещается аксиально. Это достигается тем, что, например, на внутреннем модуле 14 предусмотрена направляющая 18, внутри которой проводится выступ 20, предусмотренный на внешнем модуле 12. Эта направляющая 18, как изображено на фиг. 1b, выполнена вдоль осевого направления.
Первая форма исполнения изобретения описывается со ссылкой на фиг. 2а и 2b.
Фиг. 2а показывает общий вид рабочего прибора 110. Он имеет внутренний модуль 114 и внешний модуль 112. Внутренний модуль 114 может быть перемещен относительно внешнего модуля 112, как это изображено с помощью стрелки на фиг. 2а. При этом с помощью описанной далее направляющей внутреннего модуля 114 относительно внешнего модуля 112 аксиальное движение автоматически накладывается на поворачивание или, соответственно, вращательное движение вокруг оси А. Это соответствующее движение обозначено стрелкой, соединяющей точки a и b. Благодаря соответствующему винтовому движению внутренний модуль 114 вместе с ножом 124 (смотри фиг. 3а) спиралеобразно движется относительно средства 116 защиты.
Это винтовое движение достигается с помощью направляющей предусмотренного на внутреннем модуле 114 выступа 120 внутри предусмотренной на внешнем модуле винтовой направляющей 118, представленной на фиг. 2b. Аксиальное движение внутреннего модуля 114 относительно внешнего модуля 112 ведет к тому, что выступ 120 движется вдоль направляющей 118, и что, тем самым, как изображено на фиг. 2b, аксиальное движение накладывается на поворотное движение, что ведет к винтовому движению обоих модулей 112, 114 друг к другу.
Детали первой формы исполнения далее показаны на фиг. 3а. Как показано на фиг. 3а, внутренний модуль 114 на своем верхнем конце вмещает двигатель, который может приводить в движение с помощью муфты 130 вал 128, поэтому он вращается вокруг своей оси. На конце этого вала 128, находящегося внутри средства 116 защиты, предусмотрено лезвие 124 как пример рабочей части. Вал 128 предусмотрен внутри втулки 134, которая, в свою очередь, соединена с конусообразным промежуточным участком 136 внутреннего модуля. Вал 128 установлен внутри втулки 134 с возможностью вращения через подшипник 135.
Как уже было упомянуто, лезвие 124 находится внутри средства 116 защиты. Это средство 116 защита является частью внешнего модуля 112. Чтобы отгородить лезвие 124 от внутреннего пространства рабочего прибора 110, предусмотрена защита 126, через которую проходит вал 128. Рядом со средством 126 защиты предусмотрен следующий подшипниковый узел 132. Далее на внутренней стороне втулки 134 жестко предусмотрена кольцевидная накладка 123, на которую опирается пружина 122, как пример возвратного элемента. Эта пружина 122 служит для того, чтобы предварительно зажимать лезвие 124 в направлении к корпусу, поэтому требуется ручное воздействие, например, пользователя, который нажимает вниз внутренний модуль 114 относительно внешнего модуля 112, чтобы лезвие 124 подвинуть к вырезу в защите 116.
Как изображено на фиг. 3а, внешний модуль 112 имеет также выступы 120 на своей внутренней поверхности. Эти выступы 120 находятся в зацеплении с направляющими канавками 118, предусмотренными на промежуточном участке 136.
Эти направляющие канавки имеют, как изображено на фиг. 3b, изогнутую форму, поэтому они имеют как осевую составляющую, так и касательную составляющую относительно оси А. Промежуточный участок 136 и направляющая канавка 118 выполнены таким образом, чтобы выступ 120 проводился в этой направляющей канавке 118, если аксиальной силой действуют на внешний модуль 114, поэтому он перемещается относительно внешнего модуля 112.
С помощью этого перемещения, происходящего в осевом направлении, выступ 120 движется внутри канавки 118, что ведет к поворачиванию внутреннего модуля 114 относительно внешнего модуля 112.
При этом максимальный шаг обозначен на фиг. 3a и 3b с помощью d. Предпочтительно этот максимальный шаг d составляет максимально 15 мм, предпочтительно между 5 и 15 мм. Наклон направляющей 118 относительно осевого направления может быть выбран произвольно. Однако обычно угол относительно осевого направления составляет меньше 45° в каждой точке направляющей 118. При этом ход поворота, как изображено на фиг. 3с, может быть нарастающим ходом (на фиг. 3с обозначен как «1»), линейным ходом (на фиг. 3с обозначен как «2») или убывающим ходом (на фиг. 3с обозначен как «3»). На фиг. 3с а обозначает начальную точку движения, это означает состояние покоя рабочего прибора, в то время как b означает конечное положение. Ɵ обозначает угол поворота. Соответствующее обозначение используется также на фиг. 3a. dmax обозначает максимальное отклонение. d обозначает соответствующее отклонение, а Ɵmax обозначает максимальный поворот угла.
На фиг. 4 показана вторая форма исполнения изобретения. При этом фиг. 4а обозначает частичный вид в разрезе рабочего прибора, в то время как фиг. 4b и 4c показывают детали направляющей канавки.
Согласно фиг. 4а рабочий прибор 210 имеет, в свою очередь, внутренний модуль 214 и внешний модуль 212, которые предварительно прижаты друг к другу пружиной 222. Также при этом внешний модуль 212 имеет средство 216 защиты, отгораживающее, в свою очередь, лезвие 224, как пример рабочей части.
На внутреннем модуле 214 жестко предусмотрен выступ 220 в форме пазового ползуна. Во внешнем модуле 212 находится подходящая для этого канавка 218, которая направляет пазовый ползун 220.
Как изображено на фиг. 4b, пазовый ползун 220 движется при прикладывании аксиальной силы к внутреннему модулю 214 лишь аксиально вниз. С помощью фаски во внутреннем углу канавки пазовый ползун проводится в диагональной части канавки, что обозначается на фиг. 4b горизонтальной стрелкой. Тогда если аксиальная сила больше не прикладывается, то пазовый ползун 220 силою пружины 222 помещается по диагональной части 218b) вплоть до конца канавки, чем достигается аксиальное движение внутреннего модуля 214 в соединении с поворотным движением защиты 216 относительно внутреннего модуля 214. Этим достигается винтовое движение.
Далее, также возможно, как изображено на фиг. 4с, что при наложении аксиальной силы на внутренний модуль 214 относительно внешнего модуля 212 происходит поворот, в то время как при возврате в исходное положение происходит лишь осевое движение.
Далее также возможно, чтобы пазовый ползун был предусмотрен на внешнем модуле 212, а направляющая - на внутреннем модуле. В отношении подробностей этого «механизма шариковой ручки» и других подробностей второй формы исполнения дается ссылка на первую форму исполнения и на WO 2016/169883 A1.
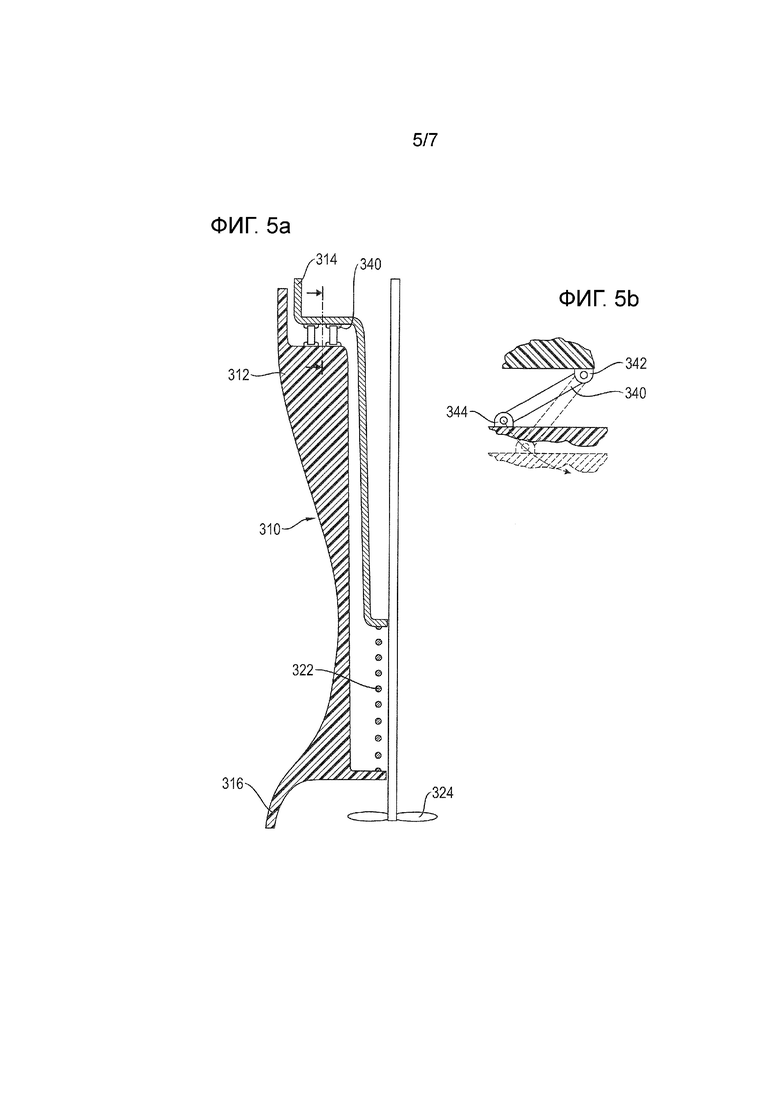
Фиг. 5 показывает третью форму исполнения изобретения, которую можно понимать как «механизм параллелограмма». При этом фиг. 5а показывает, в свою очередь, частичный вид в разрезе, в то время как фиг. 5b показывает элемент направляющей. Между внутренним модулем 314 и внешним модулем 312 рабочего прибора 310 снова предусмотрена пружина 322, которая предварительно зажимает внутренний модуль 314 относительно внешнего модуля 312. Далее здесь также предусмотрено лезвие 324 внутри защиты 316 внешнего модуля 312.
Как можно видеть, в частности, на фиг. 5b, между внутренним модулем 314 и внешним модулем 312 предусмотрены планки 340. Эти планки 340 соединены с возможностью поворота с внутренним модулем 314 в первой соединительной точке 342 и с внешним модулем 312 во второй соединительной точке. Путем применения аксиального давления на внутренний модуль 314 относительно внешнего модуля 312 планки 340 поворачиваются, как это изображено штриховкой на фиг. 5b. Таким образом, внутренний модуль 314 поворачивается относительно внешнего модуля 312. Возврат в исходное положение происходит с помощью пружины 322. Далее возможно предусмотреть вместо планок, которые могут отваливаться, также пружинные модули в форме пластинчатых пружин, которые одновременно выполняют функцию направляющей, сброса и возвратной силы. Что касается остальных подробностей третьей формы исполнения, то дается ссылка на первую форму исполнения и WO 2016/169883 A1.
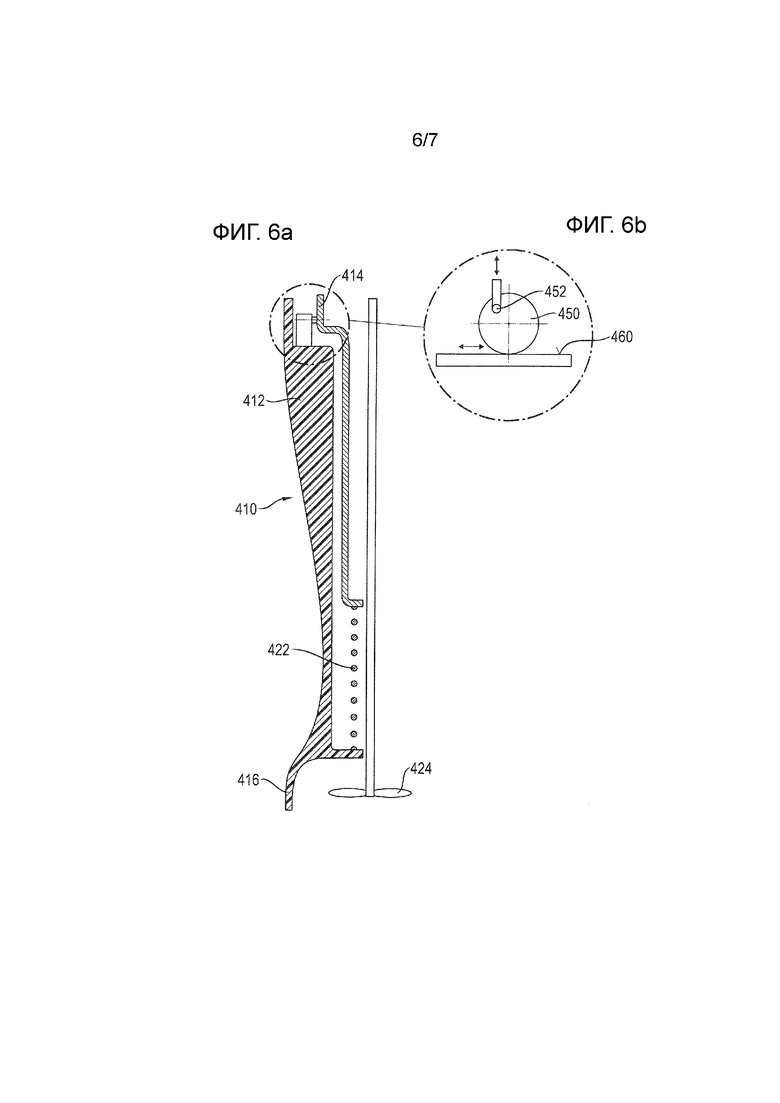
Фиг. 6 показывает четвертую форму исполнения изобретения. При этом фиг. 6а является частичным видом в разрезе этой формы исполнения, в то время как фиг. 6b - детальным видом. В данном случае внутренний модуль 414 имеет колесо 450, которое установлено эксцентрически по оси 452 (смотри фигуру 6b). Это колесо 450 прилегает к поверхности 460 прилегания, которая предусмотрена по периметру во внешнем модуле 412.
Путем воздействия аксиальной силой на внутренний модуль 414, сила, в свою очередь, воздействует на ось 452. Благодаря сцеплению или, соответственно, контакту колеса 450 с поверхностью 460 прилегания, это ведет к поворачиванию колеса вокруг его геометрического центра, которое, в свою очередь, приводит к вращающему моменту, который действует на внешний модуль 412 через поверхность 460 прилегания. Это, опять-таки, ведет к поворачиванию внешнего модуля 412 и соединенного с ним средства 416 защиты относительно внутреннего модуля 414. Также при этом возврат рабочего прибора 410 достигается через пружину 422.
При этом, в частности, для колеса 450 может использоваться шестерня, а для поверхности 460 прилегания - поверхность прилегания, которая имеет зубья.
Предпочтительно используется несколько колес или, соответственно, несколько шестерней, которые предусмотрены предпочтительно (центрально) симметрично, поскольку, в противном случае, эта форма исполнения была бы сравнительно нестабильной и могла легко заклиниваться.
Что касается других подробностей четвертой формы исполнения, то дается ссылка на первую форму исполнения и на WO 2016/169883 A1.
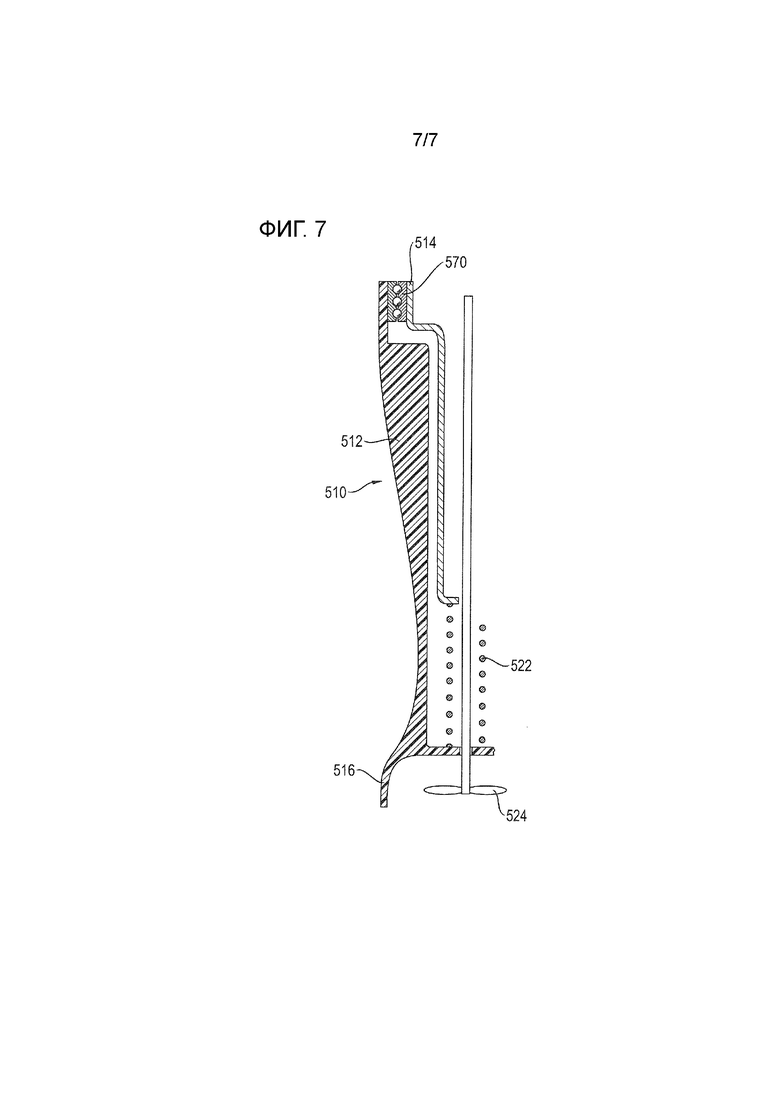
На фиг. 7 показана пятая форма исполнения изобретения. При этом между внутренним модулем 514 и внешним модулем 512 предусмотрена резьба. Она может быть, например, в форме шарико-винтовой передачи 570, как это изображено. При этом внутри внешнего модуля 512 предусмотрена резьбовая вставка, в то время как на внешней стороне внутреннего модуля 514 предусмотрена соответствующая ответная часть. При приложении аксиальной силы с помощью резьбы 570 достигается вращательное движение. При этом важно, чтобы шаг резьбы был достаточно большим, чтобы не быть самотормозящим. С помощью соответствующего вращательного движения защита 516 и связанный с ней внешний модуль 512 поворачивается относительно внутреннего модуля 514, имеющего установленную в защите 516 рабочую часть 524. Также при этом с помощью пружины 522 достигается возврат в исходное положение.
Изобретение касается рабочего прибора для перемешивания или измельчения пищевых продуктов с приводимым в движение от двигателя вращаемым валом, на противоположном двигателю конце которого предусмотрена рабочая часть, с внутренним модулем и внешним модулем, которые определяют, по меньшей мере частично, корпус рабочего прибора, при этом внутренний модуль предусмотрен внутри внешнего модуля с возможностью движения и при этом во внутреннем модуле расположен вал с возможностью вращения таким образом, что рабочая часть находится на внешней стороне рабочего прибора, чтобы иметь возможность перемешивать или измельчать пищевые продукты, при этом рабочая часть предусмотрена внутри средства защиты, предусмотренного на внешнем модуле, при этом внутренний модуль вместе с поддерживаемым им валом двигается относительно внешнего модуля аксиально в направлении вала и при этом внутренний модуль установлен относительно внешнего модуля так, что аксиальное движение внутреннего модуля по отношению к внешнему модулю приводит к вращательному движению внешнего модуля относительно внутреннего модуля. 9 з.п. ф-лы, 15 ил.
1. Рабочий прибор (110) для перемешивания или измельчения пищевых продуктов, содержащий
приводимый в движение двигателем вращаемый вал (128), на противоположном двигателю конце которого предусмотрена рабочая часть (124),
внутренний модуль (114) и внешний модуль (112), которые, по меньшей мере, частично определяют корпус рабочего прибора, причем внутренний модуль (114) выполнен с возможностью движения внутри внешнего модуля (112) и причем во внутреннем модуле (114) установлен вал (128) с возможностью вращения таким образом, что рабочая часть (124) находится на внешней стороне рабочего прибора с возможностью перемешивания или измельчения пищевых продуктов,
при этом рабочая часть (124) предусмотрена внутри средства (116) защиты, предусмотренного на внешнем модуле,
при этом внутренний модуль (114) вместе с установленным в нем валом (128) подвижен относительно внешнего модуля (112) аксиально в направлении вала (128) и при этом внутренний модуль (114) установлен относительно внешнего модуля (112) таким образом, что осевое движение внутреннего модуля (114) по отношению к внешнему модулю (112) ведет к вращательному движению внешнего модуля (114) относительно внутреннего модуля (112).
2. Рабочий прибор по п. 1, при этом установка внутреннего модуля относительно внешнего модуля имеет один или несколько выступов (120) на одном модуле среди внешнего модуля и внутреннего модуля и одну или несколько направляющих (118) соответственно на другом модуле среди внутреннего модуля и внешнего модуля, которые направляют соответственно один или несколько выступов (120),
при этом одна или несколько направляющих (118) проходят вдоль соответствующего модуля таким образом, что они вдоль направления их пролегания имеют как аксиальную протяженность, так и протяженность по периметру, что движение одного или нескольких выступов (120) вдоль них ведет к вращательному движению внешнего модуля (112) относительно внутреннего модуля (114).
3. Рабочий прибор по п. 2, причем направляющая имеет последовательность чередующихся, аксиально ориентированных участков (218а) и наклонных участков (218b).
4. Рабочий прибор по одному из предыдущих пунктов, при этом установка внутреннего модуля относительно внешнего модуля имеет один или несколько соединительных элементов (340),
при этом соединительные элементы (340) имеют соответственно первую соединительную точку (342) с внутренним модулем и вторую соединительную точку (344) с внешним модулем, в которых они соединены, соответственно, с внутренним или, соответственно, с внешним модулем,
при этом первая соединительная точка (342) и вторая соединительная точка (344) отстоят друг от друга и при этом один или несколько соединительных элементов имеют такую жесткость и выполнены таким образом, что применение аксиального давления на внутренний модуль приводит к поворотному движению одного или нескольких соединительных элементов (340), которое приводит к вращательному движению внешнего модуля (312) относительно внутреннего модуля (314).
5. Рабочий прибор по п. 4, при этом соединительные элементы имеют планки, закрепленные на внутреннем модуле и внешнем модуле, при этом планки установлены с возможностью поворота.
6. Рабочий прибор по п. 4 или 5, при этом соединительные элементы имеют пластинчатые пружины, закрепленные на внутреннем модуле и внешнем модуле.
7. Рабочий прибор по одному из предыдущих пунктов, при этом на одном модуле среди внутреннего и внешнего модулей предусмотрено одно или несколько эксцентрически установленных колес (450), которые могут накладываться на поверхность (460) прилегания или наложены на нее, которая предусмотрена соответственно на другом модуле среди внутреннего модуля и внешнего модуля и которая проходит так, что ее протяженность имеет составляющую, находящуюся вдоль направления по окружности,
при этом колеса (450) при осевом движении внутреннего модуля по отношению к внешнему модулю катятся по поверхности (460) прилегания, так что они прилагают силу, направленную вдоль направления по окружности, на поверхность прилегания, которая приводит к вращательному движению внешнего модуля относительно внутреннего модуля.
8. Рабочий прибор по п. 7, при этом колеса представляют собой шестерни, а поверхность прилегания имеет зубчатые элементы, которые находятся в зацеплении или могут вступать в зацепление с зубьями шестерни.
9. Рабочий прибор по п. 7, при этом колеса и поверхность прилегания имеют фрикционное соединение или могут вступать в него.
10. Рабочий прибор по одному из предыдущих пунктов, при этом внутренний модуль и внешний модуль соединены друг с другом с помощью резьбы (570), которая выполнена таким образом, что она при аксиальном движении внутреннего модуля относительно внешнего модуля приводит к вращательному движению внешнего модуля относительно внутреннего модуля,
при этом резьба имеет предпочтительно шариковую резьбовую пару, резьбу с накатом или резьбу со скольжением.
| WO 2016169883 A1, 27.10.2016 | |||
| US 5863118 A, 26.01.1999 | |||
| US 6293691 B1, 25.09.2001 | |||
| Предохранительная муфта | 1974 |
|
SU475470A1 |
| БЫТОВОЙ ЭЛЕКТРОПРИБОР ДЛЯ ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ ПИЩЕВЫХ ПРОДУКТОВ | 1997 |
|
RU2188570C2 |

