Перекрестные ссылки на родственные заявки
[0001] Данная заявка испрашивает приоритет предварительной заявки на патент (США) № 62/480,347, поданной 31 марта 2017 года, которая включена в настоящий документ посредство ссылки.
Область техники, к которой относится изобретение
[0002] Данное раскрытие сущности относится к области техники администрирования беспилотных систем воздушного судна, а более конкретно, к широковещательной передаче геолокационной информации из воздушного беспилотного летательного аппарата, чтобы сообщать текущую геолокацию беспилотного летательного аппарата другим.
Уровень техники
[0003] Беспилотный летательный аппарат (UAV), также иногда называемый "дроном", представляет собой радиоуправляемое или автоматизированное воздушное судно. Типично, UAV управляются пользователями по аналоговому радиоуправляемому (RC) каналу, но сегодня автопилотное программное обеспечение (SW) может использоваться в воздушном судне, чтобы позволять им лететь вне зоны прямой видимости людей–операторов. Автономные UAV по–прежнему требуют подключения к сети, чтобы оператор восстанавливал или изменять миссию, которую выполняет UAV. Типично, для такой связи UAV должны оснащаться мобильными Интернет–интерфейсами (например, 3GPP–радиоинтерфейсом или Wi–Fi). Когда UAV летят автономно, они могут требовать SW во избежание столкновений, чтобы обнаруживать и избегать других UAV, поскольку UAV не может полагаться на визуальную помощь от людей–операторов. В настоящее время, согласно только что завершенной совместной программе технологических исследований NASA–FAA уровня 3 (TCL3), не было предложено решение для исследовательской группы по проблемам обнаружения и избежания.
[0004] Кроме того, Федеральное управление гражданской авиации (FAA) и Национальное управление по аэронавтике и исследованию космического пространства (NASA) задают инфраструктуру администрирования движением по стандартам беспилотной авиационной системы (UTM). Эта система нацелена на представление эффективной структуры администрирования для движения по стандартам беспилотной авиационной системы (UAS). В этом отношении, UTM направлено на выступание в качестве механизма реализации, чтобы стимулировать широкое использование UAS в коммерческих и развлекательных окружениях при одновременной минимизации рисков для пилотируемого воздушного движения и окружающих элементов инфраструктуры.
[0005] Чтобы удовлетворять вышеописанным целям, поставщик услуг по стандартам UAS (USS), работающий в UTM, может принимать набор директив и ограничений. Директивы и ограничения позволяют компоновать текущее состояние администрируемого воздушного пространства и могут включать в себя ограниченные зоны выполнения полетов или другие ограничения на UAS. При приеме предложенной UAS–миссии, USS должна помогать в определении того, авторизована или нет миссия, чтобы продолжаться, и если авторизована, может передавать информацию траектории полета наряду с другой релевантной информацией UAS–оператору для работы беспилотного летательного аппарата (UAV).
[0006] Автоматическое зависимое наблюдение в режиме широковещания (ADS–B) используется в авиации для того, чтобы широковещательно передавать позицию воздушного судна со сверхвысокой частотой (VHF) в другие воздушные суда и наземные станции управления воздушным движением. Воздушное судно, использующее ADS–B, сначала определяет свою позицию из спутниковой навигационной системы и затем широковещательно передает эту информацию. Воздушные суда также прослушивают услугу "ADS–B в режиме приема" относительно информации о другом воздушном судне.
[0007] В настоящее время, UAV не имеют динамической информации относительно местоположения, высоты над уровнем моря, скорости и курса окружающих UAV. Хотя ADS–B может использоваться для UAV, имеются опасения по поводу безопасности в интегрировании UTM в ADS–B–системы, используемые для коммерческой авиации. В большинстве случаев, традиционные воздушные суда занимают другое воздушное пространство относительно UAV, которые предназначены для миссий на низкой высоте над уровнем моря. UAV могут оснащаться различными радиоинтерфейсами для связи; однако, эти технологии в данный момент не предоставляют способ широковещательно передавать геолокационную информацию. Любая централизованная инфраструктура или инфраструктура на основе интерфейсов прикладного программирования (API) является медленной и, с наибольшей вероятностью, не удовлетворяет строгим требованиям по времени задержки, чтобы разрешать безопасную работу. Любая централизованная система может быть слишком медленной и имеет проблемы, которые масштабируются, когда имеется множество UAV в пределах ее покрытия.
[0008] На основе этих проблем, не только для того, чтобы обеспечить избежание столкновений, но и для того, чтобы предоставлять известное воздушное пространство для работы UAV, имеется потребность в знании того, в каком месте расположены другие UAV. Один способ достигать этого состоит в том, чтобы предоставлять способ для UAV, чтобы широковещательно передавать их соответствующую геолокацию, а также другую информацию, в ходе полета.
Сущность изобретения
[0009] Согласно первому аспекту описанных вариантов осуществления способ предоставляет беспилотный летательный аппарат (UAV) для того, чтобы широковещательно передавать геолокационную информацию упомянутого UAV посредством определения, посредством этого UAV, текущей геолокации UAV посредством осуществления связи со службой геолокации и использования службы геолокации для того, чтобы определять геолокацию упомянутого UAV. UAV подготавливает радиокадр, который включает в себя геолокационную информацию, идентифицирующую текущую геолокацию UAV, при этом подготовленный радиокадр предназначен для протокола радиосвязи согласно одному из протокола радиосвязи по стандарту Партнерского проекта третьего поколения (3GPP), Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности. UAV затем подготавливает другую информацию, ассоциированную с UAV, для включения в радиокадр и передает радиокадр, который включает в себя геолокационную информацию и другую информацию, чтобы широковещательно передавать текущую геолокацию упомянутого UAV.
[0010] В другом аспекте описанных вариантов осуществления оборудование для использования в UAV, которое содержит приемо–передающее радиоустройство, чтобы передавать и принимать радиосвязь, процессор и запоминающее устройство, при этом запоминающее устройство содержит инструкции, причем, когда инструкции выполняются посредством процессора, вынуждают оборудование осуществлять способ для UAV, чтобы широковещательно передавать геолокационную информацию упомянутого UAV посредством определения, посредством этого UAV, текущей геолокации UAV посредством осуществления связи со службой геолокации и использования службы геолокации для того, чтобы определять геолокацию UAV. Оборудование также подготавливает радиокадр, который включает в себя геолокационную информацию, идентифицирующую текущую геолокацию UAV, при этом подготовленный радиокадр предназначен для протокола радиосвязи согласно одному из 3GPP–протокола радиосвязи, Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности. Оборудование затем подготавливает другую информацию, ассоциированную с UAV, для включения в радиокадр и передает радиокадр, который включает в себя геолокационную информацию и другую информацию, чтобы широковещательно передавать текущую геолокацию упомянутого UAV.
[0011] В другом аспекте описанных вариантов осуществления машиночитаемый носитель хранения данных сохраняет инструкции, которые, при выполнении посредством процессора, вынуждают UAV осуществлять способ широковещательной передачи геолокационной информации и другой информации UAV, как описано выше.
[0012] В другом аспекте описанных вариантов осуществления компьютерная программа содержит инструкции, которые, при выполнении посредством процессора, вынуждают UAV осуществлять способ широковещательной передачи геолокационной информации и другой информации упомянутого UAV, как описано выше.
[0013] В другом аспекте описанных вариантов осуществления способ предоставляет повторную широковещательную передачу геолокационной информации упомянутого UAV, принимаемой в сетевом узле сети беспроводной связи, посредством приема геолокационной информации и другой информации, ассоциированной с UAV, в радиокадре, отправленном при передаче по восходящей линии связи из UAV, при этом геолокационная информация включает в себя информацию, идентифицирующую текущую геолокацию упомянутого UAV. Радиокадр отправляется с использованием протокола радиосвязи согласно одному из протокола радиосвязи по стандарту Партнерского проекта третьего поколения (3GPP), Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности. Сетевой узел обрабатывает принимаемый радиокадр для широковещательной передачи в один или более других UAV и передает информацию, идентифицирующую текущую геолокацию UAV, в качестве повторной широковещательной передачи при передаче по нисходящей линии связи в один или более других UAV.
[0014] В другом аспекте описанных вариантов осуществления сетевой узел сети беспроводной связи принимает и повторно широковещательно передает геолокационную информацию UAV. Сетевой узел содержит процессор и запоминающее устройство, подсоединенное к процессору, при этом запоминающее устройство содержит инструкции, причем, когда инструкции выполняются посредством процессора, вынуждают сетевой узел принимать геолокационную информацию и другую информацию, ассоциированную с UAV, в радиокадре, отправленном при передаче по восходящей линии связи из UAV, при этом геолокационная информация включает в себя информацию, идентифицирующую текущую геолокацию UAV. Радиокадр отправляется с использованием протокола радиосвязи согласно одному из протокола радиосвязи по стандарту Партнерского проекта третьего поколения (3GPP), Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности. Сетевой узел обрабатывает принимаемый радиокадр для широковещательной передачи в один или более других UAV и передает информацию, идентифицирующую текущую геолокацию UAV, в качестве повторной широковещательной передачи при передаче по нисходящей линии связи в один или более других UAV.
[0015] В другом аспекте описанных вариантов осуществления машиночитаемый носитель хранения данных сохраняет инструкции, которые, при выполнении посредством процессора, вынуждают сетевой узел принимать и повторно широковещательно передавать геолокационную информацию и другую информацию UAV, как описано выше.
[0016] В другом аспекте описанных вариантов осуществления компьютерная программа содержит инструкции, которые, при выполнении посредством процессора, вынуждают сетевой узел принимать и повторно широковещательно передавать геолокационную информацию и другую информацию UAV, как описано выше.
[0017] Преимущество может извлекаться из практического использования описанных вариантов осуществления. В настоящее время в отрасли ведутся дебаты, следует или нет разрешать ADS–B–оборудование в UAV, поскольку оно может вызывать проблемы (например, шум и стремительный рост объема информации) для коммерческих воздушных судов и вышек управления воздушным движением. Описанные варианты осуществления могут обеспечить более безопасный способ включать в передачу служебных радиосигналов информацию, распознаваемую из передачи служебных сигналов ADS–B о занимаемом воздушном пространстве. Радиооборудование, используемое для связи на меньшей высоте над уровнем моря, не приводит к путанице в воздушном движении без использования этих радиочастот. Помимо этого, вышки управления воздушным движением могут выполнять алгоритмы для того, чтобы не впускать UAV в область аэропорта и уведомлять, при необходимости, коммерческие воздушные суда в отношении активности близлежащих UAV. Кроме того, UAV могут реализовывать распределенную локальную логику принятия решений, чтобы избегать столкновений на основе нового варианта геолокационной информации. UAV могут широковещательно передавать информацию внутреннего состояния, предупреждения и ошибки, которые могут оповещать операторов, чтобы осуществлять безопасную посадку транспортного средства или изменять маршрут движения вокруг проблемных зон. Типичные примеры опасностей представляют собой частые метеорологические события вдоль траектории полета. Кроме того, периодический сбор этой информации обеспечивает возможность должностным лицам или UTM–администраторам просматривать предысторию внутреннего состояния и маршрут отдельных UAV. Регистрация широковещательной информации может предоставлять вторичные варианты использования: страховые арбитражные данные в случае столкновения, погодная информация на данной высоте над уровнем моря, информация дорожного движения и пробок вокруг зоны, перемещение припаркованных транспортных средств для вариантов применения в области безопасности, информация соответствия требованиям регулирования воздушного пространства и т.д.
Краткое описание чертежей
[0018] Раскрытие сущности может лучше всего пониматься посредством обращения к нижеприведенному описанию и прилагаемым чертежам, которые используются для того, чтобы иллюстрировать различные варианты осуществления. На чертежах:
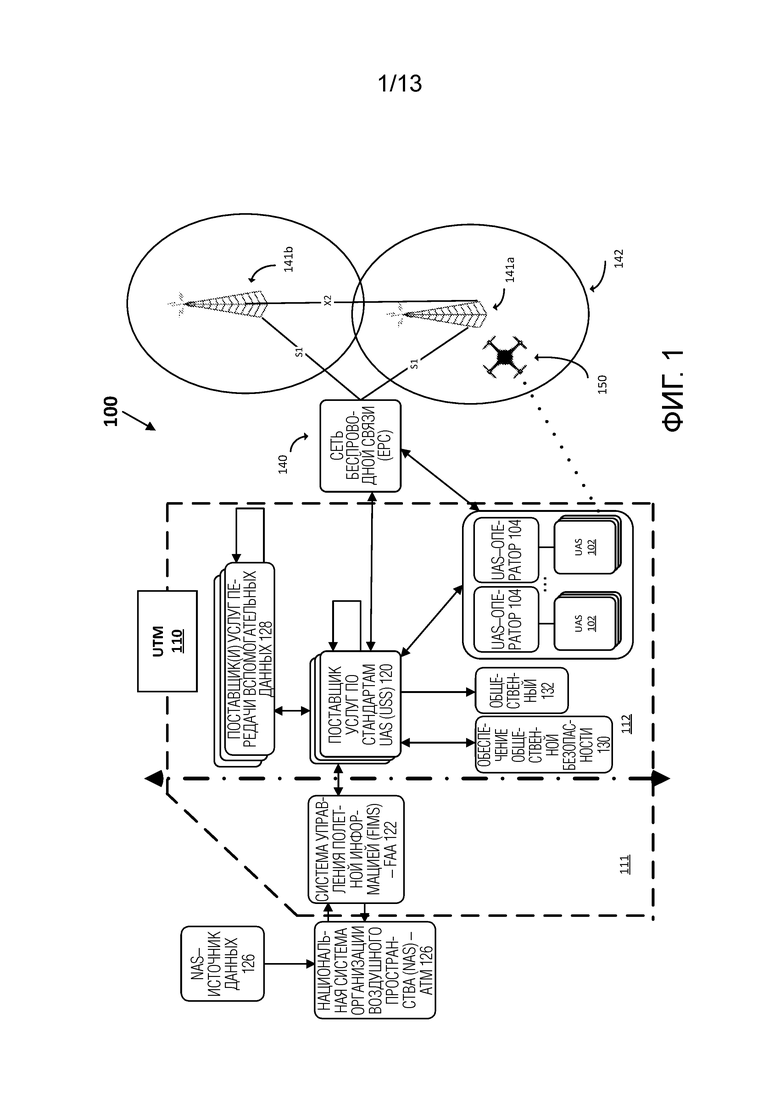
[0019] Фиг. 1 иллюстрирует систему управления воздушным движением, сеть беспроводной связи и беспилотный летательный аппарат (UAV), который работает в системе и сети согласно одному варианту осуществления;
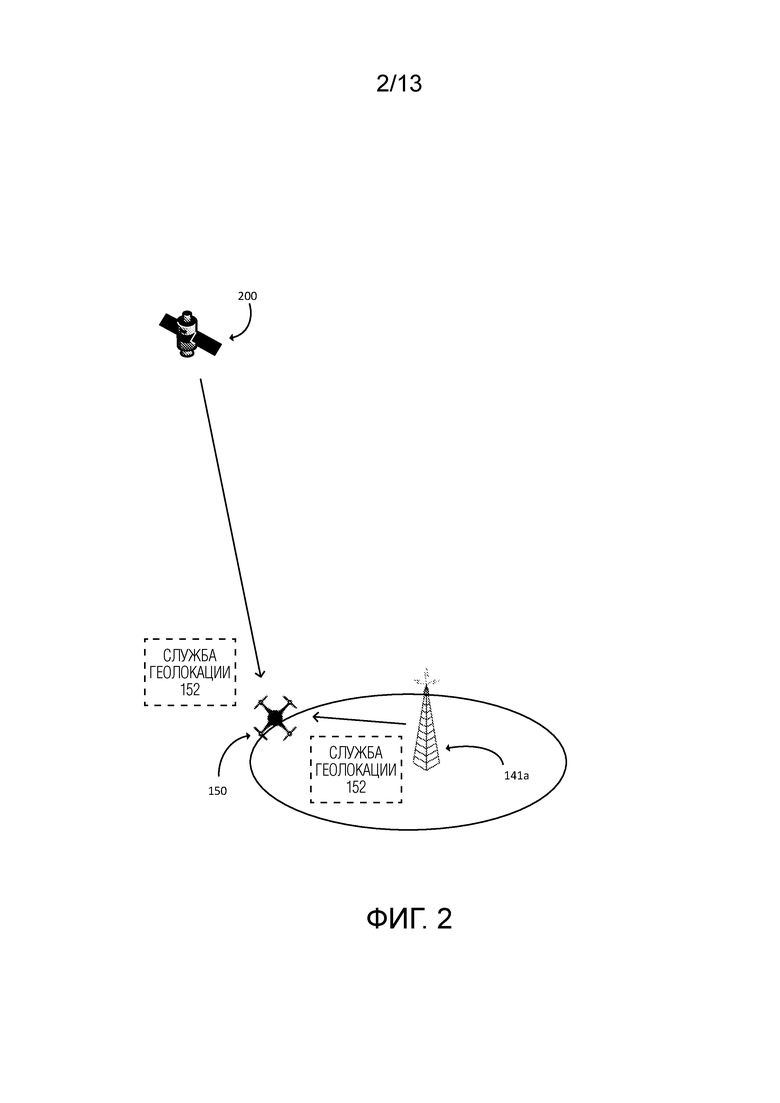
[0020] Фиг. 2 иллюстрирует примерную технологию для определения текущей геолокационной информации посредством UAV согласно одному варианту осуществления;
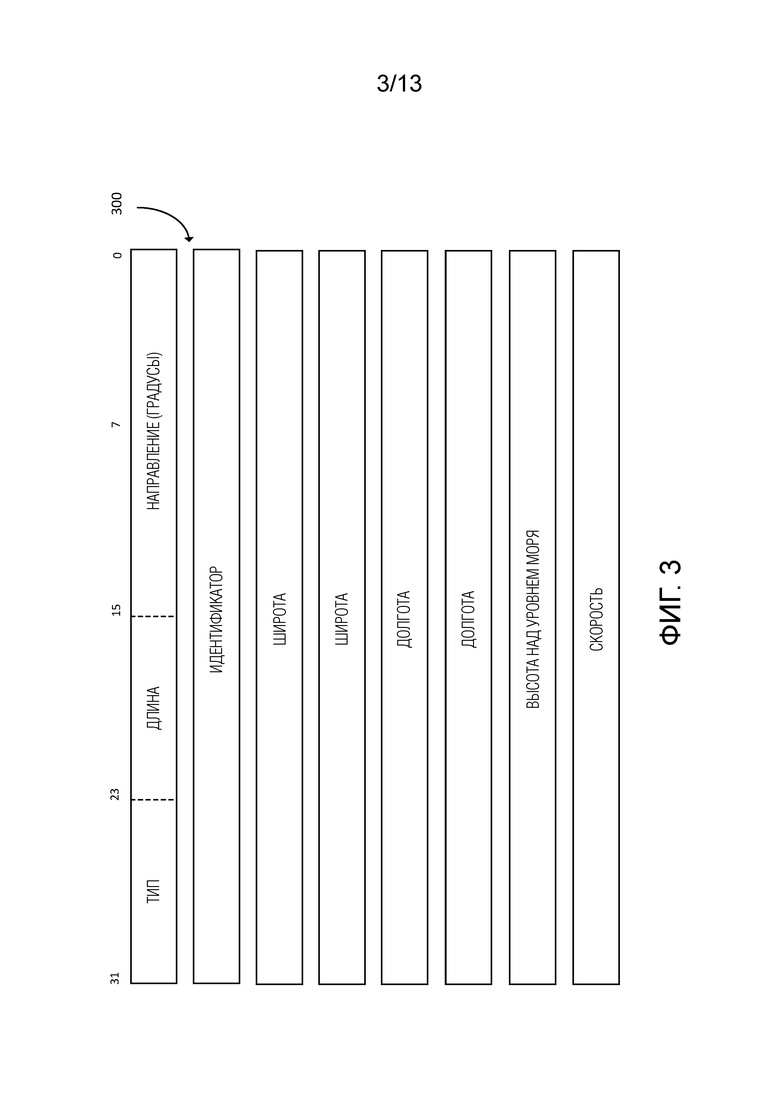
[0021] Фиг. 3 иллюстрирует примерную геолокационную информацию для UAV, который подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
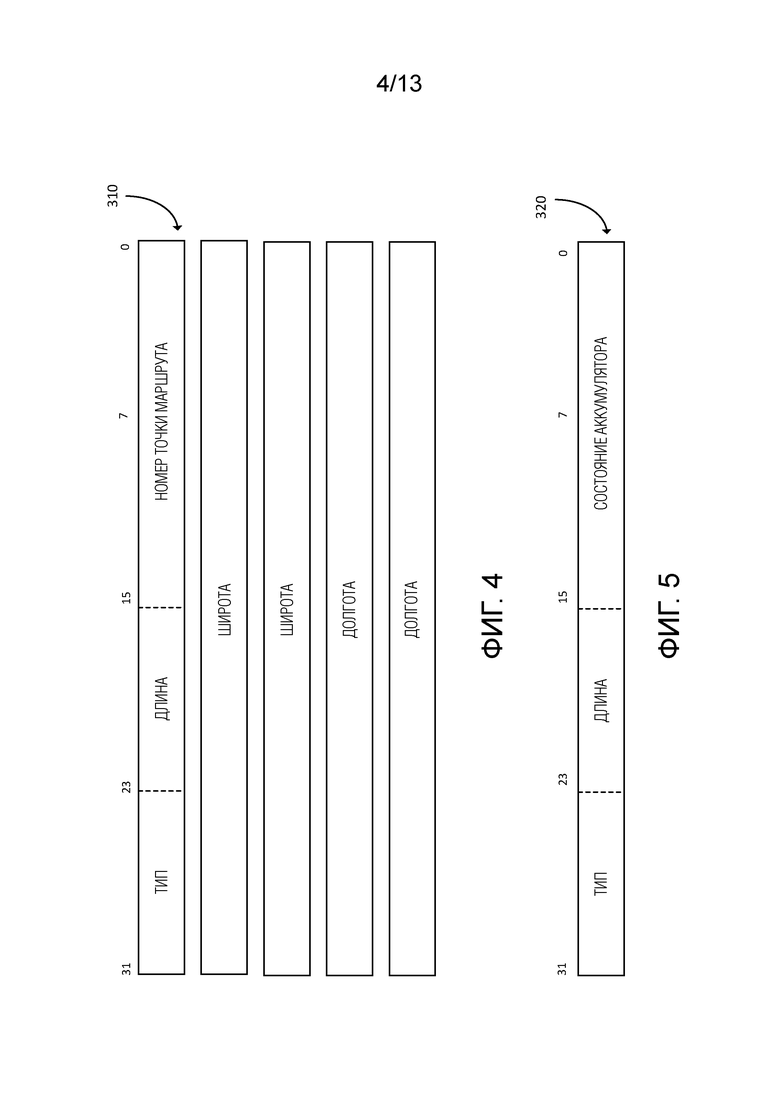
[0022] Фиг. 4 иллюстрирует примерную геолокационную информацию для точек маршрута, которая подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
[0023] Фиг. 5 иллюстрирует примерную информацию состояния аккумулятора, которая подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
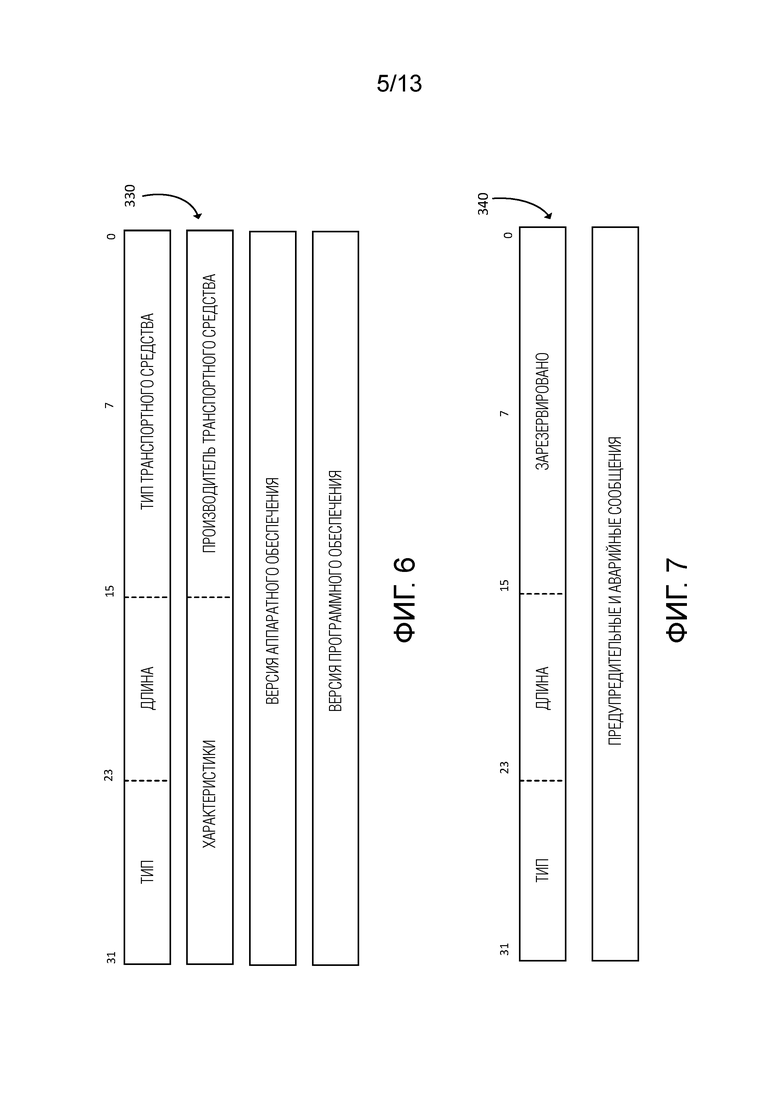
[0024] Фиг. 6 иллюстрирует примерную информацию состояния, которая подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
[0025] Фиг. 7 иллюстрирует примерную информацию аварийных и предупредительных сообщений, которая подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
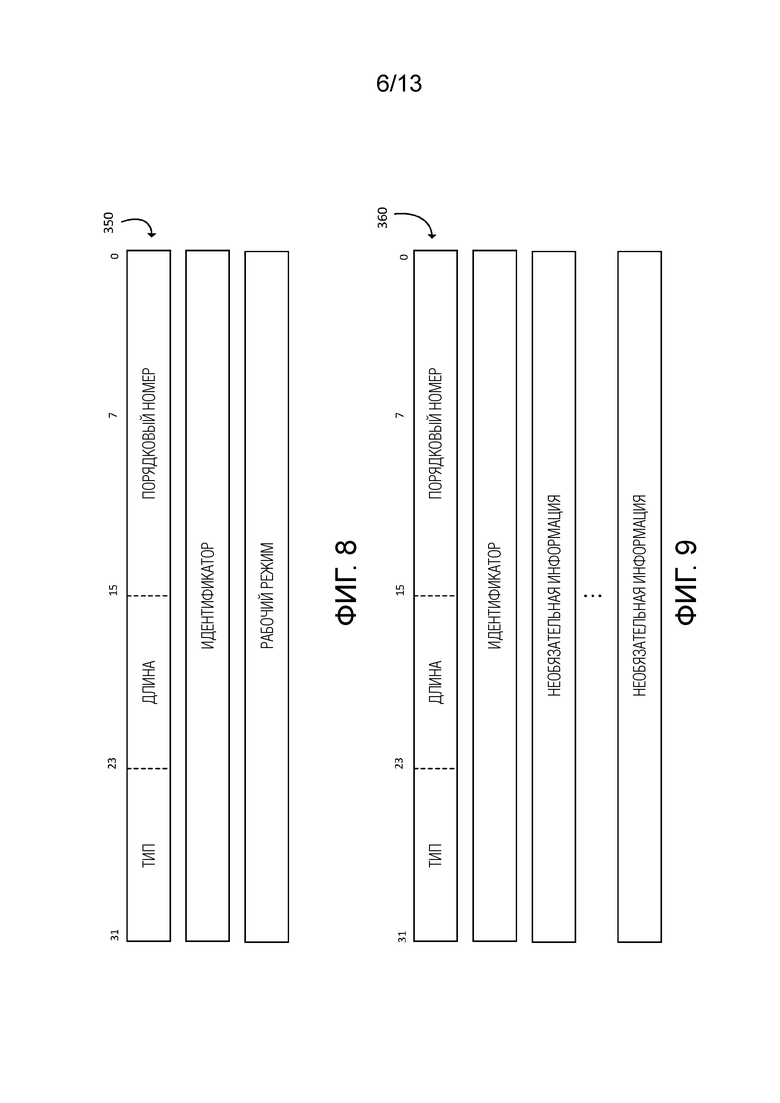
[0026] Фиг. 8 иллюстрирует примерную информацию рабочего режима для UAV, который подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
[0027] Фиг. 9 иллюстрирует примерную необязательную информацию для UAV, который подготавливается в радиокадр для широковещательной передачи согласно одному варианту осуществления;
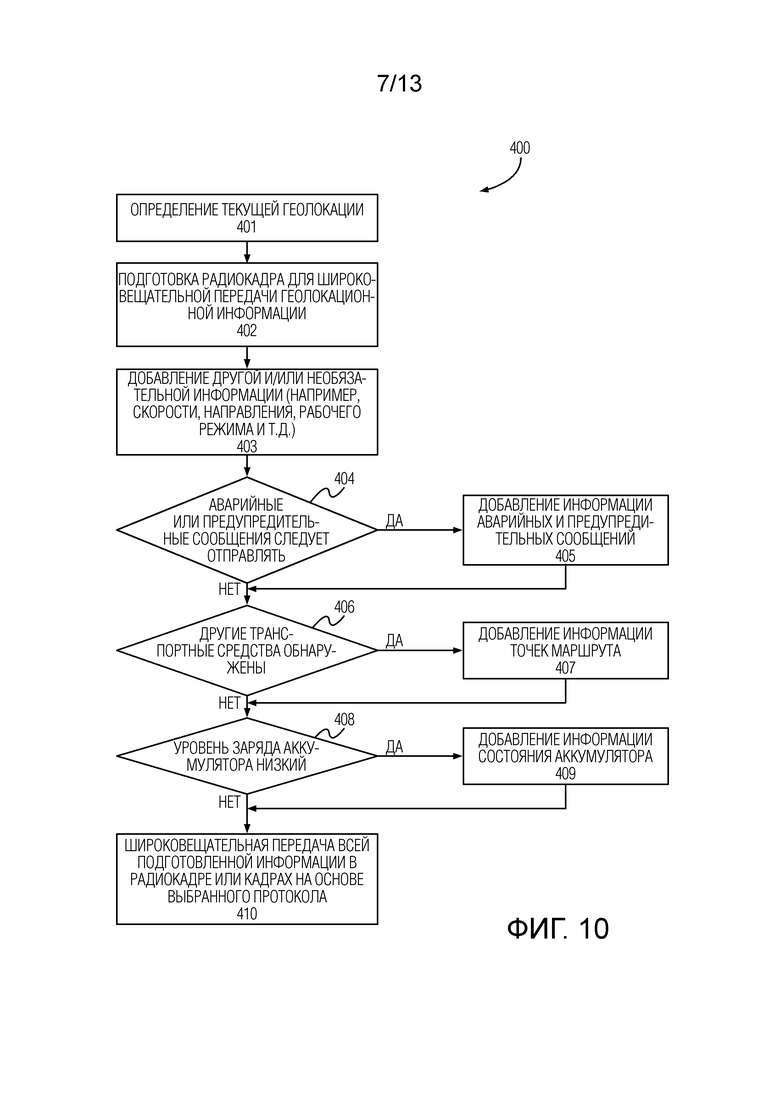
[0028] Фиг. 10 иллюстрирует способ для подготовки информации для широковещательной передачи из UAV согласно одному варианту осуществления;
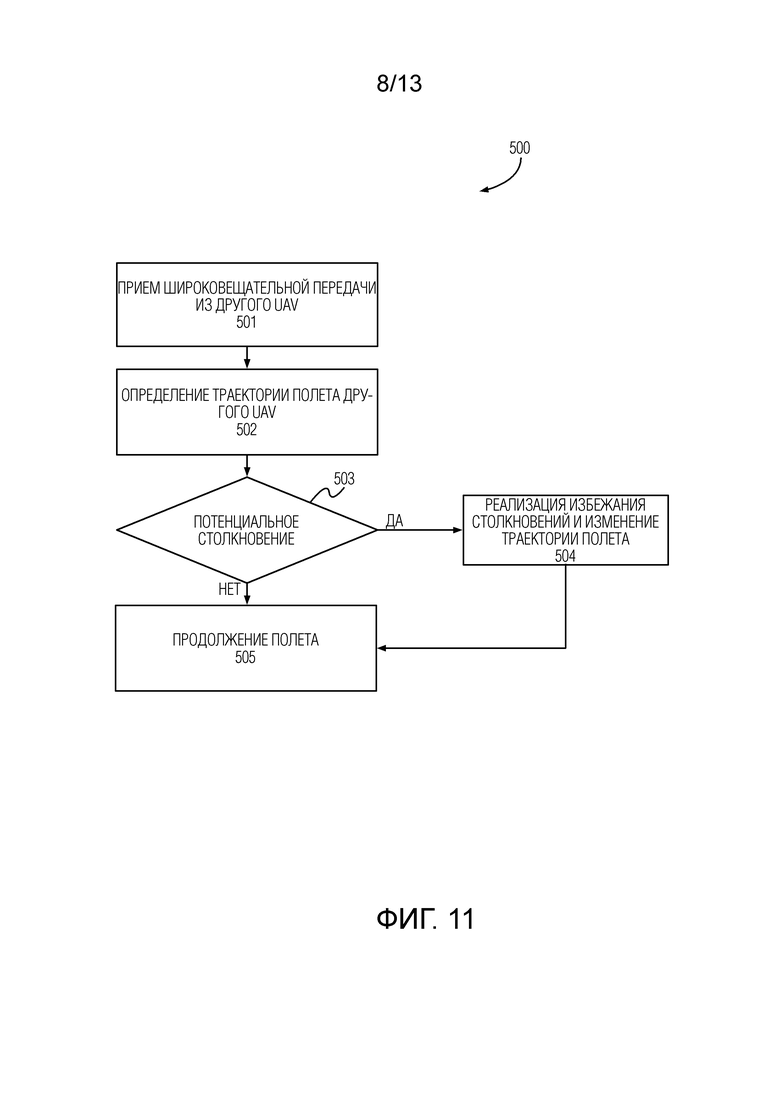
[0029] Фиг. 11 иллюстрирует способ для использования принимаемой геолокационной информации, широковещательно передаваемой из другого UAV, чтобы оценивать избежание столкновений согласно одному варианту осуществления;
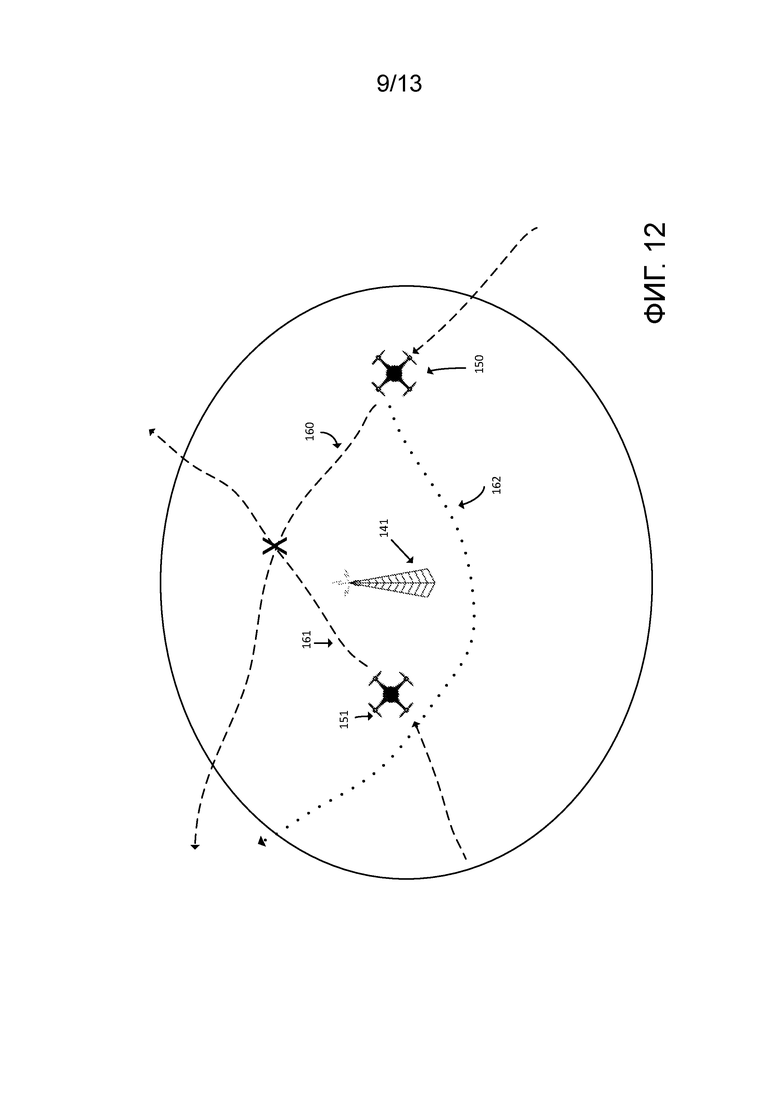
[0030] Фиг. 12 иллюстрирует избежание столкновений посредством использования широковещательно передаваемой геолокационной информации согласно одному варианту осуществления;
[0031] Фиг. 13 иллюстрирует компоненты UAV согласно одному варианту осуществления;
[0032] Фиг. 14 иллюстрирует способ для повторной широковещательной передачи геолокационной информации, принимаемой в кадре восходящей линии связи из UAV, в сетевом узле и передачи геолокационной информации в кадре нисходящей линии связи согласно одному варианту осуществления;
[0033] Фиг. 15 иллюстрирует компоненты для сетевого узла согласно одному варианту осуществления; и
[0034] Фиг. 16 иллюстрирует альтернативную реализацию компонентов для сетевого узла, имеющего виртуальные сетевые элементы согласно одному варианту осуществления.
Подробное описание изобретения
[0035] В нижеприведенном описании изложено множество конкретных подробностей. Однако, следует понимать, что раскрытые варианты осуществления могут осуществляться на практике без этих конкретных подробностей. В других случаях, хорошо известные схемы, структуры и технологии подробно не показаны, чтобы не затруднять понимание данного описания. Специалисты в данной области техники, с использованием прилагаемых описаний, должны иметь возможность реализовывать соответствующую функциональность без чрезмерного экспериментирования.
[0036] Текст в скобках и блоки с пунктирными границами используются в данном документе для того, чтобы иллюстрировать операции и признаки описанных вариантов осуществления. Однако, такие обозначения, а также блоки со сплошными границами, не обязательно требуются или могут быть необязательными в конкретных вариантах осуществления.
[0037] Ссылки в подробном описании на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают то, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретный признак, структуру или характеристику. Кроме этого, такие фразы не обязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в связи с вариантом осуществления, представляется, что осуществление такого признака, структуры или характеристики в связи с другими вариантами осуществления, описанными или нет в явной форме, находится в пределах знаний специалистов в данной области техники.
[0038] Кроме того, термин "широковещательная передача" используется в данном документе для того, чтобы описывать передачу радиокадра ко множественным целям. Однако, технологии, описанные для "широковещательной передачи", также являются применимыми в качестве "многоадресной" передачи или к "одноадресной" передаче, направленной в один целевой объект.
[0039] Ссылка в описании изобретения на процессор или обрабатывающее устройство может представлять собой микропроцессор, контроллер, микроконтроллер, центральный процессор, процессор цифровых сигналов, специализированную интегральную схему, программируемую пользователем вентильную матрицу, любой другой тип электронной схемы либо любую комбинацию одного или более из означенного. Процессор может содержать одно или несколько ядер процессора. В некоторых вариантах осуществления, часть или вся функциональность, описанная в данном документе, может реализовываться посредством процессора, выполняющего инструкции компьютерной программы, которая может сохраняться в запоминающем устройстве, на машиночитаемом носителе хранения данных или в других устройствах.
[0040] Запоминающее устройство, упоминаемое в описании изобретения, может сохранять код (который состоит из программных инструкций и который иногда упоминается в качестве компьютерного программного кода или компьютерной программы) и/или данные с использованием энергонезависимых машиночитаемых (например, компьютерночитаемых) носителей, таких как машиночитаемые носители хранения данных (например, магнитные диски, оптические диски, полупроводниковые накопители, постоянное запоминающее устройство (ROM), устройства флэш–памяти, запоминающее устройство на фазовых переходах) и машиночитаемые передающие среды (например, электрические, оптические, радио–, акустические или другие формы распространяемых сигналов, такие как несущие, инфракрасные сигналы). Например, запоминающее устройство может содержать энергонезависимое запоминающее устройство, содержащее код, который должен выполняться посредством процессора. Если запоминающее устройство является энергонезависимым, код и/или данные, сохраненные в нем, могут оставаться, даже когда сетевое устройство выключается (когда подача мощности мощность прекращается). В некоторых случаях, в то время как сетевое устройство включается, та часть кода, которая должна выполняться посредством процессора(ов), может копироваться из энергонезависимого запоминающего устройства в энергозависимое запоминающее устройство (например, динамическое оперативное запоминающее устройство (DRAM), статическое оперативное запоминающее устройство (SRAM)) сетевого устройства.
[0041] Интерфейс, как описано в этом подробном описании, может использоваться при проводной и/или беспроводной связи для передачи служебных сигналов и/или данных в/из сетевого устройства. Например, интерфейс может выполнять любое форматирование, кодирование или трансляцию, чтобы обеспечивать возможность сетевому устройству отправлять и принимать данные, будь то по проводному и/или по беспроводному соединению. В некоторых вариантах осуществления, интерфейс может содержать радиосхему, допускающую прием данных из других устройств в сети по беспроводному соединению и/или отправку данных в другие устройства через беспроводное соединение. Эта радиосхема может включать в себя передающее устройство(а), приемное устройство(а) и/или приемо–передающее устройство(а), подходящие для радиочастотной связи. Радиосхема может преобразовывать цифровые данные в радиосигнал, имеющий соответствующие параметры (например, частоту, временную синхронизацию, канал, полоса пропускания и т.д.). Радиосигнал затем может передаваться через антенны соответствующему получателю(ям). В некоторых вариантах осуществления, интерфейс может содержать сетевой интерфейсный контроллер(ы) (NIC), также известный как сетевая интерфейсная плата, сетевой адаптер, адаптер локальной вычислительной сети (LAN) или физический сетевой интерфейс. NIC может упрощать соединение сетевого устройства с другими устройствами, позволяя им осуществлять связь через провод посредством подключения кабеля в физический порт, соединенный с NIC. В некоторых вариантах осуществления, процессор может представлять часть интерфейса, и часть или вся функциональность, описанная как предоставляемая посредством интерфейса, может предоставляться более конкретно посредством процессора.
[0042] Компоненты сетевого устройства, как проиллюстрировано на чертежах, иллюстрируются в качестве отдельных прямоугольников, расположенных в одном большем прямоугольнике, для простоты в описании конкретных аспектов и признаков сетевого устройства. На практике, один или более проиллюстрированных компонентов могут содержать несколько различных физических элементов (например, интерфейс может содержать контактные выводы для соединения проводов для проводного соединения и приемо–передающее радиоустройство для беспроводного соединения).
[0043] Хотя описанные модули могут быть проиллюстрированы как реализованные в программном обеспечении, сохраненном в запоминающем устройстве, другие варианты осуществления могут реализовывать часть или все из каждого из этих модулей в аппаратных средствах.
[0044] Нижеприведенное описание описывает UAV с использованием управляющего кадра или кадров либо канала управления, чтобы широковещательно передавать геолокационную информацию UAV. Однако, следует понимать, что данные также могут быть размещены в части рабочих данных кадра и не ограничены управляющими кадрами для передачи геолокационной информации и/или другой информации. Кроме того, описание излагает широковещательную передачу геолокационной информации и/или другой информации в кадре, но такие широковещательные передачи могут возникать с использованием более одного кадра.
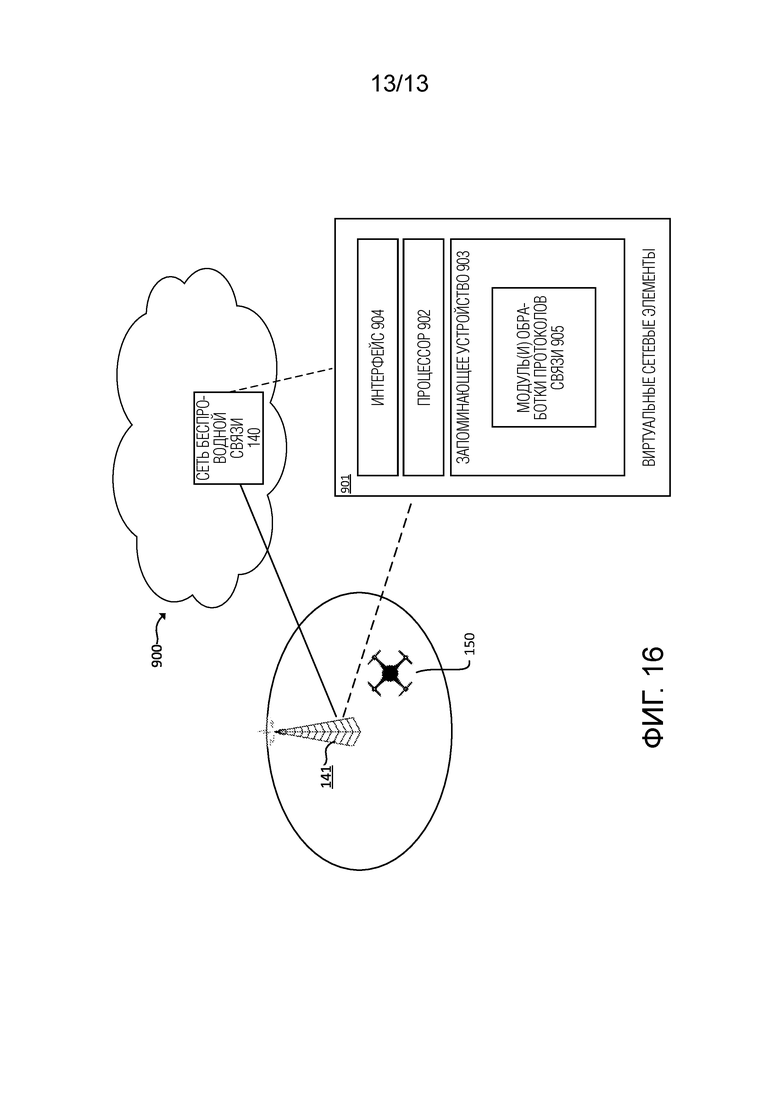
[0045] Фиг. 1 показывает систему 100 управления воздушным движением согласно одному варианту осуществления. Система 100 управления воздушным движением включает в себя систему 110 управления движением по стандартам беспилотной авиационной системы (UAS) (UTM), которая имеет государственный компонент 111 и промышленный компонент 112. Государственный компонент 111 разрабатывается и развертывается посредством одного или более государственных учреждений, таких как Федеральное агентство по авиации (FAA), и включает в себя систему 122 управления полетной информацией (FIMS). FIMS 122 осуществляет связь с Департаментом 124 управления воздушным движением (ATM) национальной системы организации воздушного пространства (NAS), который может получать информацию из NAS–источников 126 данных.
[0046] Промышленный компонент 112 разрабатывается и развертывается главным образом посредством одного или более игроков в отрасли и включает в себя один или более поставщиков 120 услуг по стандартам UAS (USS), которые осуществляют связь с UAS–операторами 104. USS 120 может иметь доступ к одному или более поставщиков 128 услуг передачи вспомогательных данных. USS 120 также может иметь доступ к/а также доступ посредством одного или более из общественного объекта 132 и/или объекта 130 обеспечения общественной безопасности.
[0047] Назначение UTM 110 заключается в управлении полетами одной или более UAS 102, которые управляются/работают/пилотируются посредством соответствующих UAS–операторов 104. UAS 102 могут представлять собой небольшие или миниатюрные UAS, которые представляют собой беспилотные воздушные суда, которые являются достаточно небольшими, так что они считаются портативными средним человеком и типично работают/движутся в режиме оптимального регулирования скорости на высоте над уровнем моря ниже более крупного пилотируемого воздушного судна. Например, небольшой UAV может представлять собой любое беспилотное воздушное судно, которое является небольшим и/или конструируется с возможностью работать ниже определенной высоты над уровнем моря (например, 1000 футов или даже ниже 500 футов). Хотя варианты осуществления, описанные в данном документе, могут применяться к небольшим UAV, системы и способы не ограничены воздушным судном этих размеров, либо которые конструируются с возможностью работать на конкретной высоте над уровнем моря. Вместо этого, способы и системы, описанные в данном документе, могут аналогично применяться к воздушному судну любого размера или конструкции. UAS 102 могут взаимозаменяемо упоминаться как UAV или беспилотные аппараты в этом описании. В частности, один воздушный UAV 150 проиллюстрирован на фиг. 1.
[0048] UAS 102 представляет собой воздушное судно без человек–оператора на борту. Вместо этого UAS 102 могут работать/пилотироваться с использованием различных степеней автономии. Например, UAS 102 может управляться человеком (т.е. UAS–оператором 104), находящимся на земле или иначе удаленным и независимым от местоположения UAS 102. Например, UAS–оператор 104 может быть расположен на земле и действовать с возможностью непосредственно управлять каждым перемещением UAS 102 или группы UAS 102 через интерфейс управления радиосвязью (например, интерфейс командования и управления (C2)). UAS–оператор 104 может передавать команды через радиоинтерфейс, чтобы инструктировать конкретной UAS 102 регулировать/перемещать конкретные пилотажные приборы (т.е. откидные створки, лопасти, электромоторы и т.д.) для следования траектории полета или другому набору целевых задач. В других сценариях, UAS–оператор 104 может предоставлять траекторию полета, который санкционируется посредством USS 120 в UAS 102 для работы в автономном режиме посредством конкретной UAS 102. Человек–оператор может отслеживать ход выполнения траектории полета без пилотирования UAS 102 и вмешиваться по мере необходимости или согласно директивам от USS 120.
[0049] Как проиллюстрировано на фиг. 1, одна UAS 102 показана как UAV 150, работающий в воздушном пространстве, имеющем покрытие радиосвязи посредством сети 140 беспроводной связи. Сеть 140 беспроводной связи может представлять собой любую из множества сети(ей) связи, которые предоставляют линии беспроводной связи с UAV. Сеть 140 может представлять собой или включать в себя сеть радиодоступа (RAN) в некоторых вариантах осуществления. Сеть 140 может работать с использованием одного или более протоколов связи. Таким образом, сеть 140 может работать с использованием протоколов радиосвязи на основе Партнерского проекта третьего поколения (3GPP), таких как третье поколение (3G), четвертое поколение (4G), 4G–стандарт долгосрочного развития (LTE), пятое поколение (5G), новый 5G–стандарт радиосвязи (например, NR и NX); Wi–Fi (например, протоколы по стандартам Института инженеров по электротехнике и радиоэлектронике (IEEE) 802.11); беспроводная персональная вычислительная сеть (например, протоколы IEEE 802.15.4); Интернет вещей (IoT); и радиосвязь в глобальной вычислительной сети с низким уровнем мощности. Другие протоколы и стандарты связи могут использоваться в реализации сети 140.
[0050] Сеть 140 беспроводной связи типично включает в себя множество сетевых радиоустройств 141 доступа (два показаны 141a и 141b), которые имеют различные названия в зависимости от используемого протокола и/или стандарта связи. Таким образом, сетевое радиоустройство(а) 141 доступа может представлять собой базовую станцию (BS), точку доступа (AP), узел B (NB) в 3G, усовершенствованный узел B (eNB) в LTE, контроллер базовой станции (BSC) или контроллер радиосети (RNC). Другие термины могут применяться. Обычно, сетевое радиоустройство 141 доступа обеспечивает возможность мобильному устройству осуществлять связь с сетью беспроводной связи в своей зоне покрытия. Пример, показанный на фиг. 1, представляет собой 4G LTE–систему, в которой eNB осуществляют связь с усовершенствованным ядром пакетной коммутации (EPC) сети 140 по S1–интерфейсу и осуществляются связь между eNB по X2–интерфейсу.
[0051] В проиллюстрированном примере по фиг. 1, UAV 150 работает в зоне покрытия сетевого радиоустройства 141a доступа. В типичном сценарии, UAV 150, после входа в зону 142 покрытия сетевого радиоустройства 141a доступа, работает аналогично UE и устанавливает линию связи с сетевыми радиоустройствами 141a доступа. Линия связи с сетью 140 связи обеспечивает линию связи обратно с UTM 110, с UAS–оператором 104 или с USS 120, либо с обоими из них. Однако, другие UAV в зоне, к примеру, в зоне 142 покрытия, не знают физическую геолокацию UAV 150.
[0052] Фиг. 2 иллюстрирует то, как UAV 150 может получать геолокационную информацию UAV 150 во время полета. UAV 150 определяет геолокационную информацию UAV 150 с использованием службы 152 геолокации. Служба 152 геолокации может быть включена в UAV 150 в некоторых вариантах осуществления. В других вариантах осуществления, служба 152 геолокации включает в себя клиентский компонент в UAV 150 и серверный компонент, расположенный в устройстве, удаленном относительно UAV 150. Служба 152 геолокации может быть включена в UAV 150 и может получать геолокационную информацию посредством использования глобальной системы позиционирования (GPS), предоставленной посредством услуг спутниковой связи. Например, UAV 150 может включать в себя приемное GPS–устройство, которое принимает информацию из GPS–спутников 200 и может вычислять геолокационную информацию UAV 150 на основе этой информации.
[0053] Служба 152 геолокации может иметь клиентский компонент, расположенный в UAV 150, и серверный компонент, расположенный в устройстве, удаленном относительно UAV 150, и может получать геолокационную информацию посредством осуществления связи с сетью 140 связи, чтобы определять позицию UAV 150 относительно сетевого радиоустройства доступа, осуществляющего связь с UAV по сети 140 связи. Например, геолокационная информация UAV 150 может определяться на основе измерений радиосигналов UAV 150 и оценки геолокационной информации (такой как позиция) на основе этих измерений радиосигналов (например, на основе триангуляции измерений радиосигналов). В таком случае, геолокационная информация определяется сетью и принимается посредством UAV 150, в противоположность непосредственному определению посредством самого UAV 150. В таком случае, клиентский компонент службы 152 геолокации может запрашивать и/или принимать геолокационную информацию из устройства, удаленного относительно UAV 150 (например, сервера, который составляет часть сети 140 связи), через сетевое радиоустройство 141 доступа. Таким образом, посредством осуществления связи со службой 152 геолокации, UAV 150 использует службу, чтобы определять свою геолокацию.
[0054] При определении текущей геолокации, UAV 150 либо получает из службы геолокации, либо преобразует широту и долготу (направление по осям X–Y) своего текущего местоположения. Поскольку UAV 150 допускает наличие высоты над уровнем моря (направления по оси Z), он также определяет текущую высоту над уровнем моря, посредством службы либо самостоятельно. Например, барометрическое считывание или другие технологии могут использоваться для того, чтобы определять высоту над уровнем моря. Кроме того, UAV 150 также может определять свою скорость. Она может определяться из изменения геолокации от одного считывания до следующего в единицу времени или может получаться из датчиков, присутствующих в UAV 150. Дополнительно, UAV 150 также может определять свое направление полета (направления только по осям X–Y или по осям X–Y–Z).
[0055] После того, как UAV 150 определяет свою геолокацию, а также другую информацию, UAV 150 затем обрабатывает геолокационную информацию для широковещательной передачи, чтобы информировать других относительно своей текущей геолокации. Одна намеченная цель для широковещательной передачи представляет собой один или более других UAV около UAV 150. Чтобы предоставлять широковещательную передачу, UAV 150 подготавливает геолокационную информацию, идентифицирующую текущую геолокацию, в формате радиокадра. В одном варианте осуществления, геолокационная информация отправляется в качестве части управляющего кадра или кадров связи из UAV 150, чтобы широковещательно передавать текущую геолокацию UAV 150.
[0056] Широковещательная передача радиокадра из UAV 150 должна зависеть от используемого протокола связи. В варианте осуществления протокол радиосвязи может представлять собой одно из 3GPP–протокола радиосвязи (например, 3G, 4G, 5G, узкополосного IoT (NB–IoT)), Wi–Fi, беспроводной персональной вычислительной сети (например, IEEE 802.15.4 Xbee/Zigbee, LoRa, Sigfox, Bluetooth) и глобальной вычислительной сети с низким уровнем мощности (LPWAN). Соответственно, геолокационная информация может вставляться или добавляться в конец существующего радиокадра или последовательности радиокадров. Альтернативно, геолокационная информация может отправляться в отдельном радиокадре(ах). Если протоколы еще используют каналы управления (к примеру, LTE), геолокационная информация может отправляться в качестве части канала управления. Однако, если выделенный канал управления реализуется для того, чтобы предоставлять информацию местоположения, геолокационная информация может отправляться в выделенном канале управления для предоставления таких широковещательных передач.
[0057] С другой стороны, в зависимости от используемого протокола, геолокационная информация может отправляться в заголовке, маяковом радиосигнале или тестовом сообщении, в канале управления, который осуществляет связь с базовой станцией или точкой доступа. Например, геолокационная информация может отправляться в широковещательном канале управления пакетами (PBCCH) при осуществлении связи с сетевым радиоустройством доступа, таким как базовая станция или точка доступа.
[0058] Фиг. 3–9 иллюстрируют различные примеры подготовки информации в формат радиокадра, который включает в себя геолокационную информацию, а также другую информацию для включения в радиокадр. Форматы показывают 32–битовое поле слова, которое может использоваться для того, чтобы содержать информацию, и в котором одно или более 32–битовых слов используются для того, чтобы содержать информацию, которая должна передаваться. Примеры служат для иллюстрации, и другие варианты осуществления могут иметь другие форматы. Фиг. 3 показывает формат 300, имеющий длину в 8 слов, при этом записи предоставляют геолокацию UAV со следующей информацией:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Направление – 16–битовое поле для того, чтобы указывать направление перемещения (например, в градусах 0...360)
Идентификатор – 32–битовое поле в качестве идентификатора UAV сетевого радиоустройства
Широта – 64–битовое поле для того, чтобы указывать текущую широту UAV
Долгота – 64–битовое поле для того, чтобы указывать текущую долготу UAV
Высота над уровнем моря – 32–битовое поле для того, чтобы указывать высоту над уровнем моря UAV
Скорость – 32–битовое поле для того, чтобы указывать скорость UAV
[0059] Следует отметить, что скорость может предоставляться в качестве части геолокационной информации в некотором варианте осуществления, но в других, скорость может не быть включена. Аналогично, некоторые варианты осуществления могут включать в себя информацию направления, в то время как другие могут не включать в себя ее.
[0060] Фиг. 4 показывают формат 310, имеющий длину в 5 слов, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Номер точки маршрута – 16–битовое поле для того, чтобы предоставлять числовой индекс точки маршрута согласно траектории
Широта – 64–битовое поле для того, чтобы указывать намеченную широту точки маршрута согласно траектории
Долгота – 64–битовое поле для того, чтобы указывать намеченную долготу точки маршрута согласно траектории
[0061] Информация точек маршрута предоставляет некоторую точку(ки) маршрута в полете UAV 150, так что другие, которые принимают эту информацию, могут использовать точку(ки) маршрута для того, чтобы определять траекторию полета UAV 150. Могут предоставляться множество точек маршрута, при этом каждой точке маршрута предоставляется различный числовой индекс с соответствующими координатами широты и долготы вдоль намеченной траектории полета. Формат 310 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0062] Фиг. 5 показывает формат 320, имеющий длину в одно слово, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Состояние аккумулятора – 16–битовое поле для того, чтобы указывать уровень заряда аккумулятора
Формат 320 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0063] Фиг. 6 показывает формат 330, имеющий длину в четыре слова, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Тип транспортного средства – 16–битовое поле для того, чтобы указывать тип UAV
Характеристики – 16–битовое поле для того, чтобы указывать характеристики UAV
Производитель транспортного средства – 16–битовое поле для того, чтобы указывать производителя UAV или полетного контроллера
FW–версия – 32–битовое поле для того, чтобы указывать используемую версию аппаратного обеспечения
SW–версия – 32–битовое поле для того, чтобы указывать используемую версию программного обеспечения
Формат 330 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0064] Фиг. 7 показывает формат 340, имеющий длину в два слова, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Зарезервировано – 16 битов для другого использования
Предупредительные и аварийные сообщения – поле переменной длины для кодирования аварийных и предупредительных сообщений
Формат 340 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0065] Фиг. 8 показывает формат 350, имеющий длину в три слова, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Порядковый номер – 16–битовое поле для того, чтобы указывать порядковый номер
Идентификатор – 32–битовое поле в качестве идентификатора UAV сетевого радиоустройства
Рабочий режим – 32–битовое поле для того, чтобы предоставлять информацию относительно текущего режима полета
[0066] Рабочий режим может предоставлять информацию относительно текущего режима полета UAV, который, например, может представлять собой: пилотирование вручную, работа в автономном режиме. Формат 350 также может переносить более конкретную информацию относительно чередования режимов полета (порядковый номер), например: посадка, взлет, перевозка, барражирование.
[0067] Формат 350 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0068] Фиг. 9 показывает формат 360, имеющий длину в N слов, при этом записи предоставляют следующую информацию:
Тип – 8–битовое поле для того, чтобы указывать тип предоставляемой информации
Длина – 8–битовое поле для того, чтобы указывать длину предоставляемой информации
Порядковый номер – 16–битовое поле для того, чтобы указывать порядковый номер
Необязательная информация – множество необязательной информации, которая должна отправляться
[0069] Формат необязательной информации обеспечивает возможность отправки различной другой информации из UAV. Число слов, которые должны использоваться, может регулироваться на основе длины информации, которая должна отправляться. Формат 360 может отправляться в качестве другой информации вместе с геолокационной информацией, показанной в формате 300, либо может отправляться отдельно.
[0070] Следует отметить, что различные представленные форматы предоставляются в качестве примеров. Другие варианты осуществления могут использовать различные форматы. Как отмечено выше, информация, предоставляемая в форматах 310, 320, 330, 340, 350 и 360, может отправляться в качестве другой информации с геолокационной информацией формата 300 в радиокадре либо может отправляться в отдельной широковещательной передаче из UAV 150. Кроме того, идентификатор, как показано на чертежах, либо другая эквивалентная информация типично отправляется с радиокадрами (или ассоциирована с радиокадрами) для того, чтобы идентифицировать UAV в качестве источника передачи. В некоторых ситуациях, идентификатор может становиться обязательным для того, чтобы идентифицировать сообщения, инициированные посредством UAV.
[0071] Фиг. 10 иллюстрирует один вариант осуществления способа для UAV, широковещательно передающего геолокационную информацию UAV с использованием радиокадра или кадров для передачи, чтобы широковещательно передавать различную вышеописанную информацию. Способ проиллюстрирован на блок–схеме 400 последовательности операций способа.
[0072] UAV определяет текущую геолокацию UAV посредством осуществления связи со службой геолокации и использования службы геолокации для того, чтобы определять геолокацию UAV (этап 401). Например, в случае если UAV включает в себя приемное GPS–устройство, UAV может определять свою текущую геолокацию посредством использования приемного GPS–устройства. Альтернативно или дополнительно, UAV может определять свою текущую геолокацию посредством приема геолокационной информации из сети связи, как описано выше.
[0073] UAV подготавливает радиокадр, который включает в себя геолокационную информацию, которая идентифицирует текущую геолокацию UAV (этап 402). Выбор радиокадра(ов) и формата может быть основан на используемом протоколе (этап 402).
[0074] Если другая информация должна отправляться (например, скорость, направление), и/или необязательная информация должна отправляться, соответствующая информация также подготавливается для широковещательной передачи (этап 403). Далее, если аварийные или предупредительные сообщения отмечены (этап 404), то информация аварийных и предупредительных сообщений подготавливается (этап 405). Если другие транспортные средства (например, UAV) обнаруживаются (этап 406), то информация точек маршрута подготавливается (этап 407). Если уровень заряда аккумулятора является низким (этап 408), то информация состояния аккумулятора подготавливается (этап 409). В завершение, после того, как вся информация собирается и переводится в соответствующий формат, информация передается в радиокадрах или кадрах на основе выбранного протокола (этап 410). Как отмечено выше, в некоторых вариантах осуществления, радиокадры представляют собой управляющие кадры или кадры канала управления. Другие варианты осуществления могут отправлять кадры в качестве рабочих данных (например, данных). В некоторых вариантах осуществления, функциональные признаки блоков 404, 406 и 408 могут быть необязательными или даже не использоваться.
[0075] Когда UAV 150 широковещательно передает свою геолокацию, UAV 150 широковещательно передает свою геолокацию для других в окрестности, к примеру, в зоне покрытия сетевого радиоустройства доступа. Чтобы широковещательно передавать информацию, UAV 150 может достигать этого через сетевое радиоустройство доступа или непосредственно в другие транспортные средства при передаче между равноправными узлами.
[0076] В одном варианте осуществления, UAV 150 передает радиокадр в сетевое радиоустройство доступа, и сетевое радиоустройство доступа широковещательно передает информацию UAV в другие транспортные средства в своей зоне покрытия. В некоторых вариантах осуществления, сетевое радиоустройство доступа, описанное в данном документе, представляет собой RAN. Передача посредством сетевого радиоустройства доступа может представлять собой ретрансляционную передачу, или сетевое радиоустройство доступа может формировать собственный информационный комплект относительно UAV 150 или нескольких UAV в зоне покрытия. В любом случае, информация, отправленная из UAV 150 в сетевое радиоустройство доступа, затем передается в широковещательной передаче в другие летательные аппараты, которые поддерживают связь с сетевым радиоустройством доступа и/или сетью.
[0077] В качестве примера передачи геолокационной информации в радиокадре между UAV и сетевым радиоустройством доступа, таким как eNB для работы в LTE–режиме, информация может быть включена в широковещательный канал управления пакетами (PBCCH).
[0078] В другом варианте осуществления, широковещательная передача может осуществляться между UAV, при этом используется связь между равноправными узлами. Сетевое радиоустройство доступа задает инфраструктуру для двух или более UAV, которые устанавливают связь друг с другом через канал связи в боковой линии связи, аналогично тому, как UE используют связь в боковой линии связи. Например, UAV 150 может использовать физический широковещательный канал боковой линии связи (PSBCH) для того, чтобы широковещательно передавать информацию в один или более UAV в зоне покрытия.
[0079] UAV 150 не только имеет возможность широковещательно передавать геолокацию и другую информацию, но и также имеет способность принимать широковещательные передачи других UAV, непосредственно через связь между равноправными узлами и/или через сетевое радиоустройство доступа. Таким образом, геолокационная информация другого UAV, при приеме, может использоваться посредством UAV 150. Например, UAV 150 может ретранслировать принимаемую широковещательную передачу посредством повторной передачи информации другого UAV. В одном варианте осуществления, информация другого UAV может отправляться в качестве части необязательной информации при подготовке радиокадра. Эта технология обеспечивает возможность UAV 150 расширять рабочую зону для широковещательно передающего UAV в отношении физического расстояния. В другой технологии, UAV 150 может иметь возможность работать с использованием нескольких протоколов. В этом варианте осуществления, UAV 150 может принимать широковещательную передачу другого UAV с использованием одного протокола связи и повторно передавать широковещательную передачу с использованием другого протокола. В одном варианте осуществления, повторная передача информации может отправляться в качестве необязательной информации. Когда UAV с использованием различных протоколов работают в идентичной зоне, этот сценарий обеспечивает возможность одному UAV повторно широковещательно передавать свою геолокационную информацию с использованием второго протокола связи, так что широковещательная передача захватывается посредством UAV с использованием протокола, отличающегося от протокола, используемого посредством исходного широковещательно передающего UAV. В другом примере, UAV может принимать информацию из другого объекта, к примеру, информацию местоположения из ADS–B, если он имеет эти характеристики. Затем он может широковещательно передавать свою геолокацию с использованием другого протокола, такого как LTE или Wi–Fi и т.д., чтобы информировать другие UAV, которые не имеют ADS–B–характеристик.
[0080] Одно преимущество передачи текущей геолокационной информации в другие UAV в окрестности состоит в том, что другие UAV могут обрабатывать информацию для избежания столкновений. Таким образом, когда UAV 150 принимает геолокацию, широковещательно передаваемую из другого UAV, UAV 150 может обрабатывать информацию, чтобы определять то, является или нет потенциальное столкновение неизбежным. Принимаемая информация, связанная с высотой над уровнем моря, скоростью и направлением движения, широковещательно передаваемая из другого UAV, может использоваться посредством UAV 150, чтобы определять ход потенциального столкновения с другим UAV. Здесь, принимаемая информация точек маршрута может предоставлять дополнительную информацию относительно намеченной траектории полета другого UAV.
[0081] Ссылаясь на фиг. 11 и 12, фиг. 11 показывает один вариант осуществления способа для обеспечения избежания столкновений на блок–схеме 500 последовательности операций способа. Фиг. 12 иллюстрирует избежание столкновений. UAV 150 в своей траектории 160 полета принимает широковещательную передачу из другого UAV 151 (этап 501) и определяет траекторию 161 полета другого UAV 151 из принимаемой широковещательной передачи (этап 502). Затем, с помощью определенной потенциальной траектории полета, выполняется определение в отношении потенциального столкновения с другим UAV 151 (этап 503). Если столкновение является неизбежным, UAV 150 реализует избежание столкновений и изменяет траекторию полета (этап 504) на траекторию 162 полета, и после этого UAV 150 продолжает свой полет в намеченный пункт назначения (этап 505). Если UAV 150 определяет то, что столкновение не является неизбежным (этап 503), UAV 150 продолжает свой полет в намеченный пункт назначения (этап 505) по исходной траектории 160 полета.
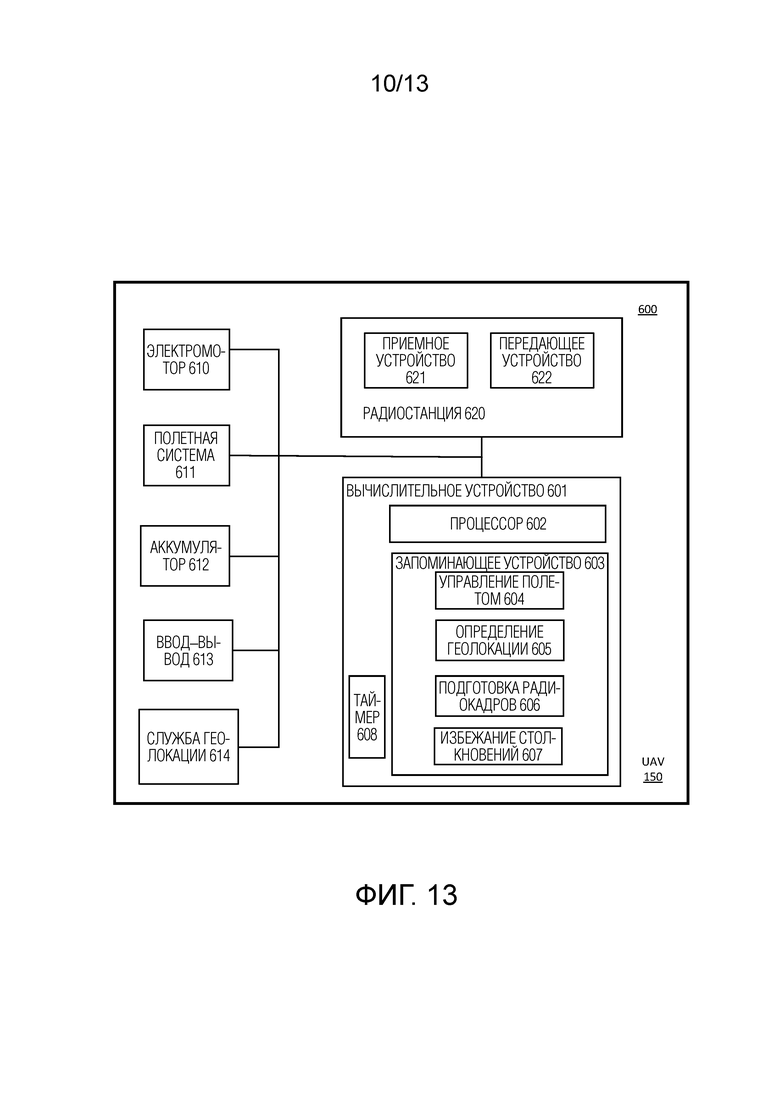
[0082] Фиг. 13 показывает блок–схему UAV 150 согласно одному примерному варианту осуществления. Как показано на фиг. 13, оборудование 600 UAV 150 может включать в себя один или более наборов электромоторов 610 с соответствующими контроллерами электромотора, которые управляют частотой вращения электромоторов. Например, электромотор(ы) 610 могут представлять собой электрические моторы, которые работают от аккумулятора 612. UAV 150 может включать в себя любое число электромоторов 610, которые размещены в любой конфигурации относительно корпуса и/или предполагаемого курса UAV. Например, электромоторы 610 могут иметь такую конфигурацию, в которой UAV 150 представляет собой многороторный вертолет (например, квадрокоптер). В других вариантах осуществления, электромоторы 610 могут иметь такую конфигурацию, в которой UAV представляет собой воздушное судно с неподвижным крылом (например, самолет с одним двигателем или с двумя двигателями). В этих вариантах осуществления, электромотор(ы) 610, в сочетании с полетной системой 611, поддерживают UAV 150 в полете и/или приводят в движение UAV в требуемом направлении. Также включаются аккумулятор 612 и одно или более устройств 613 ввода–вывода, таких как датчики (например, барометрический датчик), аудио– и/или видеодатчики и устройства записи (например, камеры, микрофоны, динамики) и другие периферийные устройства для различных вводов и/или выводов. Служба 614 геолокации также включается и выполняет функцию, поясненную для службы 152 геолокации по фиг. 2.
[0083] UAV 150 включает в себя вычислительное устройство 601, которое включает в себя процессор 602. Запоминающее устройство 603 включено в качестве части вычислительного устройства 601, но в других вариантах осуществления, запоминающее устройство 603 может быть отдельным от вычислительного устройства 601. Запоминающее устройство 603 сохраняет инструкции, которые, при выполнении посредством процессора 602, инструктируют UAV 150 выполнять различные операции в зависимости от конкретного выполняемого программного обеспечения. В одном варианте осуществления, запоминающее устройство 603 содержит набор из инструкций 604 управления полетом для управления полетом UAV, инструкций 605 определения геолокации для определения геолокации UAV 150, инструкций 606 для подготовки радиокадров для подготовки формата радиокадра информации, которая должна широковещательно передаваться, и инструкции 607 для избежания столкновений для определения потенциальных столкновений с другими UAV, когда принимаются широковещательные передачи из других UAV. Различные инструкции выполняют операции, как описано выше в отношении фиг. 3–11.
[0084] Различные инструкции (например, 604, 605, 606, 607) могут представлять собой компьютерную программу, содержащую инструкции, которые, при выполнении посредством процессора 602, инструктируют UAV 150 осуществлять способ широковещательной передачи геолокационной информации и другой информации UAV, как описано выше. Запоминающее устройство 603 может представлять собой машиночитаемый носитель хранения данных, сохраняющий инструкции, которые, при выполнении посредством процессора 602, инструктируют UAV 150 осуществлять способ широковещательной передачи геолокационной информации и другой информации UAV, как описано выше.
[0085] UAV 150 также включает в себя радиостанцию 620, которая включает в себя приемное устройство 621 и передающее устройство 622 (или комбинированное приемо–передающее устройство) для предоставления соответствующих функций приема и передачи для беспроводной связи. Радиостанция 620 может иметь более одного приемного устройства или передающее устройство либо, альтернативно, одно приемное устройство и передающее устройство может работать в качестве виртуальной радиостанции, чтобы предоставлять более одного радиорежима работы. В одном варианте осуществления, радиостанция 620 может работать с использованием одного или более следующих протоколов или стандартов:
– радиосвязь третьего поколения (3G),
– радиосвязь четвертого поколения (4G),
– 4G–стандарт долгосрочного развития (LTE),
– радиосвязь пятого поколения (5G),
– радиосвязь на основе нового 5G–стандарта радиосвязи (NR или NX),
– радиосвязь по протоколу 802.11 (Wi–Fi),
– радиосвязь по протоколу 802.15.4,
– радиосвязь в беспроводной персональной вычислительной сети,
– радиосвязь на основе Интернета вещей (IoT), и
– радиосвязь в глобальной вычислительной сети с низким уровнем мощности
[0086] Радиостанция осуществляет связь в беспроводном режиме с сетевым радиоустройством доступа при широковещательной передаче геолокационной информации и другой информации и осуществляет связь с другими UAV при осуществлении связи с использованием связи между равноправными узлами, к примеру, связи в боковой линии связи. Аналогично, когда широковещательные передачи геолокации из других транспортных средств принимаются посредством приемного устройства 621, принимаемая информация обрабатывается посредством процессора 602. Как отмечено выше, принимаемая информация может использоваться для того, чтобы ретранслировать широковещательную передачу посредством повторной широковещательной передачи, с использованием идентичного протокола или другого протокола; либо принимаемая информация может использоваться для того, чтобы определять возможное столкновение. В одном варианте осуществления, инструкции 605 определения геолокации могут использоваться для того, чтобы определять местоположение широковещательно передающего транспортного средства, и инструкции 607 для избежания столкновений могут использоваться для того, чтобы обнаруживать и избегать возможные столкновения. В одном варианте осуществления, таймер 608 включен в вычислительное устройство 601, чтобы определять любую неактуальную информацию, которая может приниматься в широковещательной передаче. Неактуальная информация, например, представляет собой информацию относительно местоположения UAV, которое более не представляет текущее местоположение этого UAV. Информация, определенная как неактуальная, может удаляться.
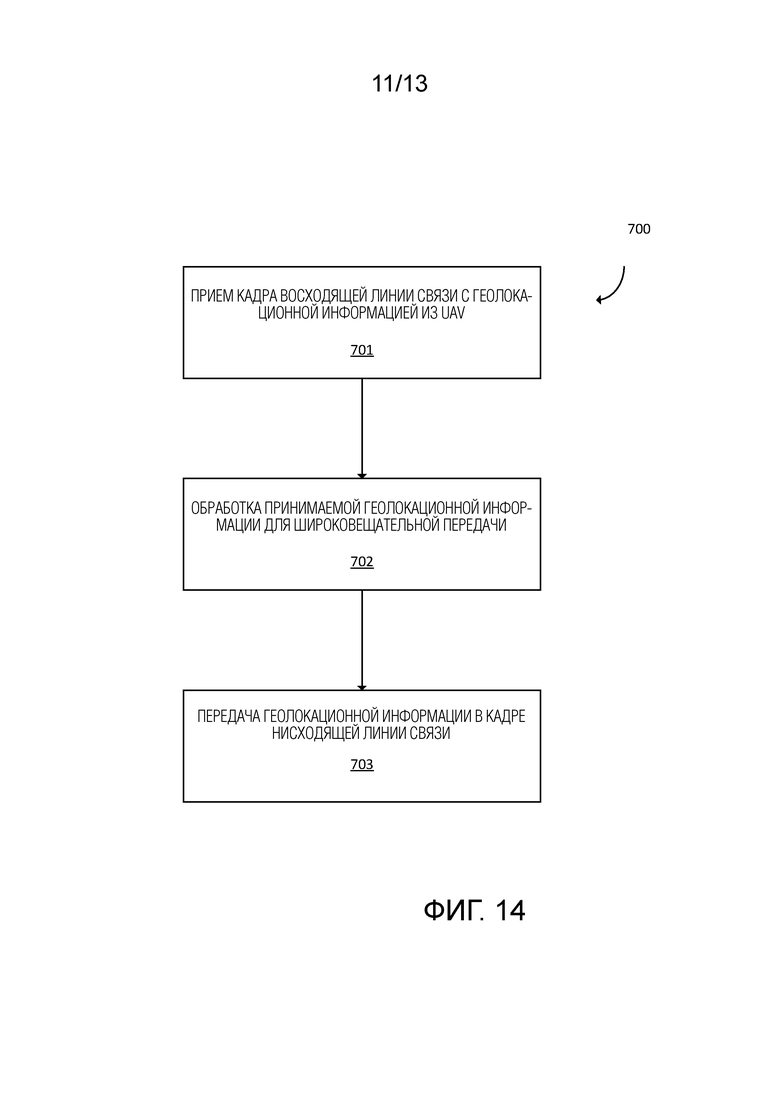
[0087] Фиг. 14 иллюстрирует один вариант осуществления способа для сетевого узла, чтобы повторно широковещательно передавать геолокационную информацию UAV, принимаемую в сетевом узле. Способ проиллюстрирован на блок–схеме 700 последовательности операций способа. Сетевой узел может представлять собой сетевое радиоустройство доступа (например, сетевое радиоустройство 141 доступа) или другой узел сети 140. Сетевой узел принимает геолокационную информацию и другую информацию, ассоциированную с UAV, 150 в радиокадре, отправленном при передаче по восходящей линии связи из UAV 150, при этом геолокационная информация включает в себя информацию, идентифицирующую текущую геолокацию UAV 150 (этап 701). Сетевой узел обрабатывает принимаемый радиокадр (этап 702) и передает информацию, идентифицирующую текущую геолокацию UAV, в качестве повторной широковещательной передачи при передаче по нисходящей линии связи в один или более других UAV (этап 703).
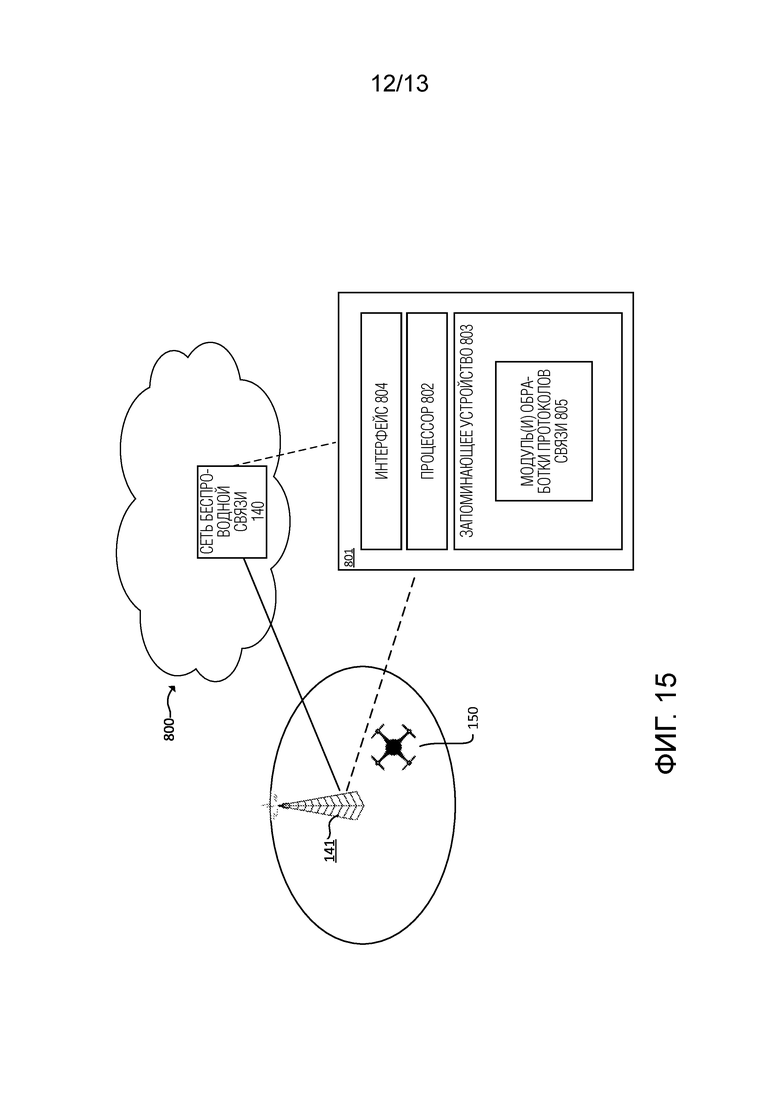
[0088] Фиг. 15 показывает сеть 800, которая включает в себя сеть 140 беспроводной связи, в которой UAV 150 работает около одного из сетевых радиоустройств 141 доступа. В этом варианте осуществления, сеть 800 представляет собой более крупную сеть, которой принадлежит или с которой взаимодействует сеть 140 беспроводной связи. В одном варианте осуществления, сеть 800 может включать в себя UTM 110 по фиг. 1. Показан сетевой узел 801, имеющий интерфейс 804, процессор 802 и запоминающее устройство 803. Сетевой узел 801 может функционально находиться в сетевом радиоустройстве 141 доступа, чтобы выполнять операции в этом местоположении, либо может функционально находиться в другом месте в сети 140 беспроводной связи. Сетевой узел 801 может составлять часть RAN. Процессор 802 выполняет операции обработки, при этом запоминающее устройство 803 может включать в себя программные инструкции, которые могут выполняться в процессоре 802. Интерфейс 804 может включать в себя радиокомпоненты (передающее устройство и приемное устройство), если узел расположен в сетевом радиоустройстве 141 доступа. Если интерфейс 804 расположен в другом месте, он предоставляет соединение с другими узлами в сети 140 или 800. Компоненты примерного узла 801 иллюстрируются в качестве отдельных прямоугольников, расположенных в одном большем прямоугольнике, по причинам простоты в описании конкретных аспектов и признаков сетевого узла 801. Однако, на практике, один или более проиллюстрированных компонентов могут постоянно размещаться в других узлах в сети 140.
[0089] Как отмечено выше в описании широковещательной передачи геолокационной информации из UAV 150, одна технология для широковещательной передачи заключается в том, чтобы передавать геолокационную информацию и другую информацию в сетевое радиоустройство 141 доступа в радиокадре восходящей линии связи. Альтернативно, сетевой узел 801 в сетевом радиоустройстве 141 доступа или другой сетевой узел в сети 140 определяет то, какие транспортные средства (например, UAV) находятся в зоне покрытия сетевого радиоустройства 141 доступа. Типично, устройства в зоне покрытия конкретного сетевого радиоустройства доступа поддерживают связь с этим сетевым радиоустройством доступа. Затем сетевой узел 801 или ретранслирует принимаемую широковещательную информацию или обрабатывает широковещательную информацию и формирует собственный информационный комплект относительно геолокации UAV 150. Эта информация затем передается в различные летательные аппараты в зоне покрытия в радиокадрах связи в нисходящей линии связи. В любом случае, информация, отправленная из UAV 150 в сетевое радиоустройство 141 доступа при передаче по восходящей линии связи, затем передается в нисходящей широковещательной передаче в другие летательные аппараты, которые поддерживают связь с сетевым радиоустройством 141 доступа.
[0090] В вариантах осуществления, в которых протокол связи использует заголовки, маяковые радиосигналы или тестовые сообщения (например, Wi–Fi–связь), сетевое радиоустройство доступа может принимать и повторно широковещательно передавать принимаемую широковещательную передачу из UAV 150 по этим средам. Для протоколов 3GPP–(например, 3G/4G/5G–) связи, каналы управления могут использоваться для повторной передачи широковещательной передачи. Например, может использоваться вышеуказанный PBCCH–канал. Другой канал управления для передачи по нисходящей линии связи представляет собой широковещательный канал соты (CBCH). Также могут использоваться другие каналы.
[0091] Кроме того, аналогично UAV, сетевой узел может принимать исходную широковещательную передачу с использованием одного протокола связи и повторно широковещательно передавать информацию из UAV 150 с использованием другого протокола связи. Таким образом, различные протоколы связи могут использоваться при связи в восходящей и нисходящей линии связи. В одном варианте осуществления, модуль(и) 805 обработки протоколов связи может постоянно размещаться в запоминающем устройстве, содержащем инструкции, чтобы выполнять отдельные протоколы. Таким образом, UAV с использованием одного протокола связи может широковещательно передавать свою геолокационную информацию в другой UAV, с использованием различного протокола связи, за счет инструктирования сетевому узлу 801 предоставлять преобразование широковещательной передачи с первого протокола связи на второй протокол связи. Таким образом, UAV с использованием различных протоколов связи по–прежнему могут обмениваться текущей геолокационной информацией через сетевой узел 801.
[0092] Относительно повторной передачи, сетевой узел 801 может принимать дополнительную информацию из другого объекта, отличного от UAV 150. Эта дополнительная информация может добавляться в передачу по нисходящей линии связи. Например, в одном варианте осуществления, сетевой узел 801, способом сетевого радиоустройства 141 доступа, может принимать ADS–B–информацию и включать информацию, полученную из ADS–B, или информацию, которая фильтруется, в передачу по нисходящей линии связи.
[0093] Фиг. 16 показывает сеть 900, которая включает в себя сеть 140 беспроводной связи, в которой UAV 150 работает около одного из сетевых радиоустройств 141 доступа. Сетевой узел 901 является аналогичным сетевому узлу 801 по фиг. 15. Таким образом, процессор 902, запоминающее устройство 903, интерфейс 904 и модуль(и) 905 обработки протоколов связи являются функционально аналогичными соответствующим компонентам 802–805 по фиг. 15, за исключением того, что сетевой узел 901 может иметь виртуальные сетевые элементы. Процессор 902 или запоминающее устройство 903 может постоянно размещаться в другом месте и не обязательно в сетевом узле 901. В некоторых случаях, один или более элементов могут постоянно размещаться в облаке.
[0094] Следует отметить, что запоминающее устройство 803 и 903 может сохранять код (который состоит из программных инструкций и который иногда упоминается в качестве компьютерного программного кода или компьютерной программы) и/или данные с использованием машиночитаемых (например, машиночитаемых) носителей, таких как машиночитаемые носители хранения данных, как описано выше в раскрытии сущности. Инструкции (например, компьютерная программа), выполняемые в процессоре, вынуждают сетевой узел 801, 901 принимать и повторно широковещательно передавать геолокационную информацию и другую информацию UAV, как описано выше. Запоминающее устройство 803, 903 может представлять собой машиночитаемый носитель хранения данных, сохраняющий инструкции, которые, при выполнении посредством процессора 802, 902, вынуждают сетевой узел 801, 901 осуществлять способ приема и повторной широковещательной передачи геолокационной информации и другой информации UAV, как описано выше.
[0095] Посредством реализации раскрытого способа и оборудования, характеристики определения геолокации задаются доступными для летательных аппаратов (таких как UAV) на меньшей высоте над уровнем моря на частотах, типично не используемых для управления коммерческими воздушными судами на больших высотах над уровнем моря. UAV могут теперь реализовывать распределенную локальную логику принятия решений, чтобы выполнять избежание столкновений на основе геолокационной информации. Кроме того, помимо геолокационной информации, UAV могут широковещательно передавать другую информацию, связанную с транспортным средством или осуществляемой траекторией полета, а также широковещательно передавать аварийные и предупредительные сообщения. Такие предупреждения могут включать в себя локальные погодные условия вдоль траектории полета UAV.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И WTRU ДЛЯ СКАНИРОВАНИЯ WUR | 2020 |
|
RU2782452C1 |
| ИДЕНТИФИКАЦИЯ СЕТЕВОГО УЗЛА, НА КОТОРЫЙ БУДУТ РЕПЛИЦИРОВАТЬСЯ ДАННЫЕ | 2017 |
|
RU2756304C2 |
| ОБРАБОТКА КАТЕГОРИЙ ДОСТУПА ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2734320C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАПРОСА СИСТЕМНОЙ ИНФОРМАЦИИ | 2018 |
|
RU2731497C1 |
| ОТВЕТ КАСАЕМО ПРОИЗВОЛЬНОГО ДОСТУПА С ФОРМИРОВАНИЕМ АНАЛОГОВОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2016 |
|
RU2669523C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛУЧШЕНИЯ ПОКРЫТИЯ УСТРОЙСТВ СВЯЗИ МАШИННОГО ТИПА (MTC) | 2013 |
|
RU2660657C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ЕДИНИЦЫ ДАННЫХ | 2018 |
|
RU2730584C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ACKCH С ПОВТОРЕНИЕМ В ОРТОГОНАЛЬНЫХ СИСТЕМАХ | 2007 |
|
RU2424619C2 |
| ОБМЕН ОБЩИМИ БЛОКАМИ УПРАВЛЕНИЯ | 2017 |
|
RU2735670C1 |
| ТЕХНОЛОГИИ УПРАВЛЕНИЯ ДВУХКАНАЛЬНЫМИ БЕСПРОВОДНЫМИ УСТРОЙСТВАМИ | 2008 |
|
RU2483440C2 |
Группа изобретений относится к двум способам широковещательной передачи и повторной широковещательной передачи геолокационной информации беспилотному летательному аппарату (UAV), оборудованию на UAV, двум машиночитаемым носителям для хранения данных для осуществления вышеуказанных способов, сетевому узлу беспроводной связи. Для широковещательной передачи подготавливают радиокадр с геолокационной и другой информацией и передают его посредством UAV. Для повторной передачи принимают в сетевом узле радиокадр по восходящей линии связи из UAV, обрабатывают его и передают в качестве повторной передачи по нисходящей линии связи другим UAV. Оборудование на UAV содержит приемопередающее радиоустройство, процессор, запоминающее устройство. Сетевой узел содержит процессор и соединенное с ним запоминающее устройство. Обеспечивается безопасность полетов множества UAV в ограниченной области воздушного пространства. 6 н. и 26 з.п. ф-лы, 16 ил.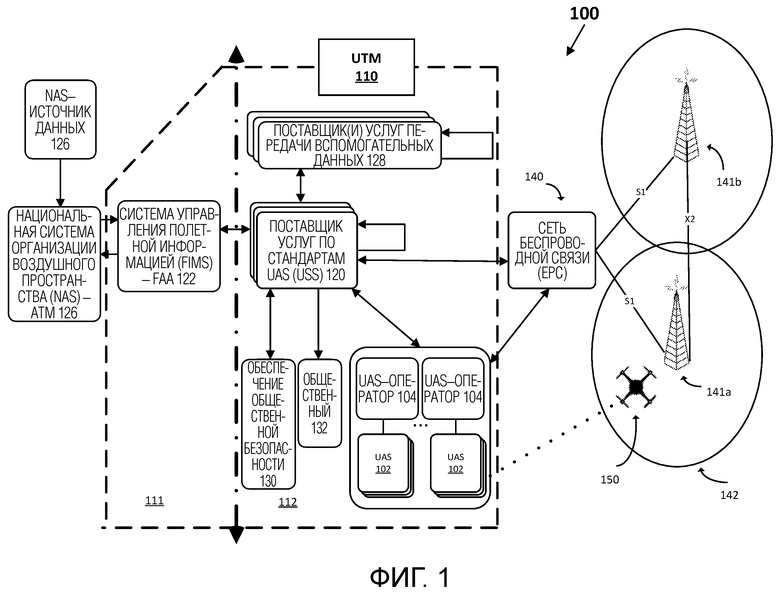
1. Способ (400) для беспилотного летательного аппарата (UAV) (150), широковещательно передающего геолокационную информацию упомянутого UAV, содержащий этапы, на которых:
– определяют (401), посредством UAV, текущую геолокацию UAV посредством осуществления связи со службой (152) геолокации и использования службы геолокации, чтобы определять геолокацию UAV;
– подготавливают (402), посредством UAV, радиокадр, который включает в себя геолокационную информацию, идентифицирующую текущую геолокацию UAV, при этом подготовленный радиокадр предназначен для протокола радиосвязи;
– подготавливают (403), посредством UAV, другую информацию, ассоциированную с UAV, для включения в радиокадр;
– передают (410), посредством UAV, радиокадр, который включает в себя геолокационную информацию и другую информацию, чтобы широковещательно передавать текущую геолокацию упомянутого UAV.
2. Способ (400) по п. 1, в котором передача радиокадра включает в себя этап, на котором передают радиокадр в управляющем кадре.
3. Способ (400) по п. 1, в котором передача радиокадра включает в себя этап, на котором передают радиокадр в заголовке, маяковом радиосигнале или тестовом сообщении.
4. Способ (400) по п. 1, в котором передача радиокадра включает в себя этап, на котором передают радиокадр в канале управления, который осуществляет связь с базовой станцией (141) или точкой (141) доступа.
5. Способ (400) по п. 4, в котором передача радиокадра включает в себя этап, на котором передают радиокадр в широковещательном канале управления пакетами (PBCCH) в базовую станцию (141).
6. Способ (400) по п. 1, в котором передача радиокадра включает в себя этап, на котором широковещательно передают радиокадр при прямой связи между равноправными узлами в другие UAV через широковещательную передачу по боковой линии связи.
7. Способ (400) по п. 6, в котором передача радиокадра включает в себя этап, на котором передают радиокадр в физическом широковещательном канале боковой линии связи (PSBCH) в один или более других UAV.
8. Способ (400) по любому из пп. 1-7, в котором подготовка радиокадра дополнительно включает в себя этап, на котором предоставляют информацию (300) широты, долготы, высоты над уровнем моря и скорости, связанную с текущей геолокацией UAV.
9. Способ (400) по п. 8, в котором подготовка радиокадра дополнительно включает в себя этап, на котором предоставляют информацию (300) направления, связанную с направлением движения UAV в текущей геолокации.
10. Способ (400) по любому из пп. 1-9, в котором подготовка радиокадра дополнительно включает в себя этап, на котором предоставляют информацию, связанную с одним или более из следующего:
– состояние аккумулятора в UAV;
– точки маршрута, намеченные для пересечения посредством UAV;
– идентификационные данные UAV;
– тип UAV;
– длина UAV;
– тип транспортного средства UAV;
– характеристики UAV;
– производитель транспортного средства UAV;
– аппаратное обеспечение, используемое посредством UAV;
– программное обеспечение, используемое посредством UAV;
– предупредительные или аварийные сообщения из UAV и
– рабочий режим UAV.
11. Способ (400) по п. 1, дополнительно содержащий этапы, на которых:
– принимают геолокационную информацию, широковещательно передаваемую (501) из второго UAV (151); и
– используют принимаемую геолокационную информацию второго UAV, чтобы избегать столкновение (502, 503, 504, 505) со вторым UAV.
12. Способ (400) по п. 11, в котором прием геолокационной информации, широковещательно передаваемой из второго UAV (151), осуществляется через базовую станцию (141) или точку (141) доступа.
13. Способ (400) по п. 11, в котором прием геолокационной информации, широковещательно передаваемой из второго UAV (151), осуществляется через прямую связь в боковой линии связи между равноправными узлами со вторым UAV.
14. Способ (400) по любому из пп. 11-13, дополнительно содержащий этап, на котором:
– используют таймер (608) для того, чтобы идентифицировать неактуальную геолокационную информацию, широковещательно передаваемую из второго UAV (151).
15. Способ (400) по п. 1, дополнительно содержащий этапы, на которых:
– принимают передачу из другого объекта и
– повторно передают информацию, содержащуюся в передаче, принимаемой из другого объекта, посредством включения информации, содержащейся в передаче, принимаемой из другого объекта, в другую информационную часть радиокадра.
16. Способ (400) по п. 1, дополнительно содержащий этапы, на которых:
– принимают передачу из другого объекта и
– повторно передают информацию, содержащуюся в передаче, принимаемой из другого объекта, посредством включения информации, содержащейся в передаче, принимаемой из другого объекта, в другую информационную часть радиокадра, при этом повторная передача использует протокол связи, отличный от протокола, используемого для того, чтобы принимать передачу от другой стороны.
17. Способ (400) по любому из пп. 1-16, в котором подготовленный радиокадр предназначен для протокола радиосвязи согласно одному из протокола радиосвязи по стандарту Партнерского проекта третьего поколения (3GPP), Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности.
18. Способ (400) по любому из пп. 1-16 и 17, в котором передача радиокадра включает в себя этап, на котором передают радиокадр с использованием одного или более протоколов связи на основе следующего:
– радиосвязь третьего поколения (3G);
– радиосвязь четвертого поколения (4G);
– 4G–стандарт долгосрочного развития (LTE);
– радиосвязь пятого поколения (5G);
– радиосвязь на основе нового 5G–стандарта радиосвязи (NR или NX);
– радиосвязь по протоколу 802.11;
– радиосвязь по протоколу 802.15.4;
– радиосвязь в беспроводной персональной вычислительной сети;
– радиосвязь на основе Интернета вещей (IoT) и
– радиосвязь в глобальной вычислительной сети с низким уровнем мощности.
19. Оборудование (600) для использования на беспилотном летательном аппарате (UAV) (150), содержащее:
– приемопередающее радиоустройство (620) для того, чтобы передавать и принимать радиосвязь;
– процессор (602) и
– запоминающее устройство (603), соединенное с процессором, причем запоминающее устройство содержит инструкции (604, 605, 606, 607), причем, когда инструкции выполняются посредством процессора, вынуждают оборудование осуществлять способ, изложенный в одном или более из пп. 1-17 и 18.
20. Машиночитаемый носитель (603) хранения данных, сохраняющий инструкции, которые при выполнении посредством процессора (602) беспилотного летательного аппарата (UAV) (150) вынуждают UAV осуществлять способ, изложенный в одном или более из пп. 1-17 и 18.
21. Способ (700) для повторной широковещательной передачи геолокационной информации беспилотного летательного аппарата (UAV) (150), принимаемой в сетевом узле сети беспроводной связи, содержащий этапы, на которых:
– принимают (701) геолокационную информацию и другую информацию, ассоциированную с UAV, в радиокадре, отправленном при передаче по восходящей линии связи из UAV, при этом геолокационная информация включает в себя информацию, идентифицирующую текущую геолокацию UAV, и радиокадр отправляется с использованием протокола радиосвязи;
– обрабатывают (702) принимаемый радиокадр для широковещательной передачи в один или более других UAV и
– передают (703) информацию, идентифицирующую текущую геолокацию UAV, в качестве повторной широковещательной передачи по нисходящей линии связи в один или более других UAV.
22. Способ (700) по п. 21, в котором передача по нисходящей линии связи включает в себя этап, на котором передают другую информацию, ассоциированную с UAV.
23. Способ (700) по любому из пп. 21 или 22, в котором сетевой узел представляет собой базовую станцию (141) или точку (141) доступа.
24. Способ (700) по п. 23, в котором сетевой узел использует функциональность облака, чтобы выполнять обработку принимаемой передачи по восходящей линии связи.
25. Способ (700) по п. 21, в котором радиокадр из UAV предоставляет информацию широты, долготы, высоты над уровнем моря и скорости, связанную с текущей геолокацией UAV, и информация (300) широты, долготы, высоты над уровнем моря и скорости передается в повторной широковещательной передаче.
26. Способ (700) по п. 25, в котором радиокадр также включает в себя информацию (300) направления, связанную с направлением движения UAV, и направление движения передается в повторной широковещательной передаче.
27. Способ (700) по любому из пп. 21-24, в котором передача повторной широковещательной передачи использует протокол связи для передачи по нисходящей линии связи, отличный от протокола, используемого для того, чтобы принимать передачу по восходящей линии связи от UAV.
28. Способ (700) по любому из пп. 21-24, в котором передача по нисходящей линии связи включает в себя дополнительную информацию, вставленную посредством сети в передачу по нисходящей линии связи, которая ассоциирована с UAV.
29. Способ (700) по любому из пп. 21-24, в котором передача по нисходящей линии связи включает в себя этап, на котором передают другую информацию, ассоциированную с UAV, и дополнительную информацию, вставленную посредством сети.
30. Способ (700) по любому из пп. 21-29, в котором радиокадр отправляется с использованием протокола радиосвязи согласно одному из протокола радиосвязи по стандарту Партнерского проекта третьего поколения (3GPP), Wi–Fi–протокола радиосвязи, протокола беспроводной персональной вычислительной сети и протокола глобальной вычислительной сети с низким уровнем мощности.
31. Сетевой узел (801, 901) сети беспроводной связи для приема и повторной широковещательной передачи геолокационной информации беспилотного летательного аппарата (UAV) (150), содержащий:
– процессор (802, 902) и
– запоминающее устройство (803, 903), соединенное с процессором, причем запоминающее устройство содержит инструкции (805, 905), причем, когда инструкции выполняются посредством процессора, вынуждают сетевой узел осуществлять способ, изложенный в одном или более из пп. 21-29 и 30.
32. Машиночитаемый носитель (803, 903) хранения данных, сохраняющий инструкции (805, 905), которые, при выполнении посредством процессора (802, 902) сетевого узла (801, 901), который принимает и повторно широковещательно передает геолокационную информацию беспилотного летательного аппарата (UAV) (150), вынуждают сетевой узел осуществлять способ, изложенный в одном или более из пп. 21-29 и 30.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЭТОГО | 2015 |
|
RU2637838C2 |
| JP 2003092545 A, 28.03.2003 | |||
| РУЧКА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2175290C2 |
| СПОСОБ ОТПРАВКИ УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ, СПОСОБ ПРИЕМА И УСТРОЙСТВО | 2013 |
|
RU2595642C1 |
| US 20160292403 A1, 06.10.2016. | |||

