ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение «Устройство с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства» относится к классу «Конструкция», в области «Устройства, которые встроены в проезжую часть» и в раздел «Встраивание датчиков на проезжую часть или другие дорожные покрытия". Согласно Международной патентной классификации (МПК) изобретение относится к классу E01F11/00. Также изобретение относится к подразделу «Устройства для предотвращения или ограничения трафика», соответствующему классу E01F13/00.
ТЕХНИЧЕСКАЯ ЗАДАЧА, РЕШЕННАЯ ИЗОБРЕТЕНИЕМ
Данное изобретение относится к осуществлению так называемого «умного лежачего полицейского», где скорость транспортного средства определяется нажимными датчиками, после чего активируется привод складного механизма для замедления транспортных средств путем поднятия нижнего складного стержня, который одновременно поднимает верхний складной стержень, образуя угловое положение, обеспечивающее максимальную прочность и устойчивость при ударе колес от проезжающих транспортных средств со скоростью, превышающей скорость, запрограммированную в контроллере. После определенного периода времени устройство возвращается в исходное положение ожидания.
УРОВЕНЬ ТЕХНИКИ
В общем, так называемые «лежачие полицейские» часто строятся на самой проезжей части или располагаются в верхней части дороги, чтобы регулировать скорость транспортных средств, проходящих над ними. Эти устройства, как правило, достаточно низки, чтобы позволить транспортному средству безопасно пересекать их, но также достаточно высоки, чтобы заставить транспортное средство замедляться при прохождении над ним, потому что в противном случае они могли бы вызвать значительные неудобства для транспортного средства. Лежачие полицейские различаются по длине, но обычно во время их строительства и осуществления оставляют пространство (бордюры и канавки) между ударной частью и одним концом закрытой дороги, чтобы обеспечить сток. Во многих случаях места по обе стороны от лежачего полицейского позволяют проезжать приоритетным транспортным средствам, хотя эффективность будет зависеть от типа транспортного средства и конструкции дороги. Динамические лежачие полицейские отличаются от обычных тем, что активируются только тогда, когда транспортное средство движется с определенной скоростью. Транспортные средства, движущиеся ниже заданной скорости, не будут испытывать дискомфорта при проезде через «лежачий полицейский». Динамические лежачие полицейские также могут пропускать машины скорой помощи на более высоких скоростях. Например, система Actibump, используемая в Швеции, основана на оборудовании с электроприводом, встроенном в дорожное покрытие, которое функционирует как платформа, которая падает на несколько сантиметров при приближении скоростного транспортного средства. Любое транспортное средство, приближающееся к или ниже ограничения скорости, будет проезжать на уровне дороги. В этом случае система измеряет скорость транспортных средств, используя радар, а не с помощью нажимных датчиков, что является существенным отличием от технического решения существующего изобретения. В заявке на патент США № 13/102868 раскрыто устройство, препятствующее движению на дороге, которое закреплено на улице и служит для контроля скорости транспортных средств, но оно не имеет детектора скорости и имеет складной механизм препятствия для транспортных средств, весьма отличающийся от механизма по настоящему изобретению.
ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ ИЗОБРЕТЕНИЯ
Чтобы лучше понять описание технического решения изобретения «Устройство с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства», используются следующие 12 фигур, на которых показаны характерные виды, поперечные сечения и детали изобретения:
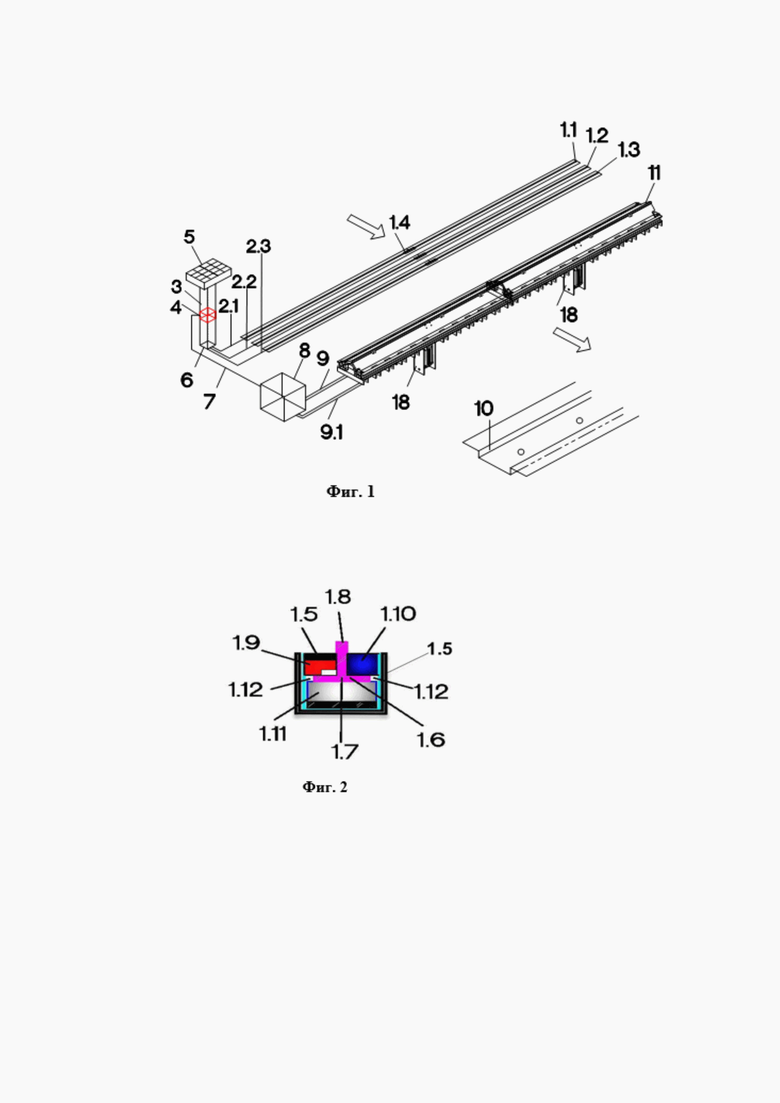
Фигура 1 представляет собой пространственный контур расположения сегментов, составляющих изобретение (механизмы двойного складывания для снижения скорости),
Фигура 2 представляет собой поперечное сечение нажимного датчика,
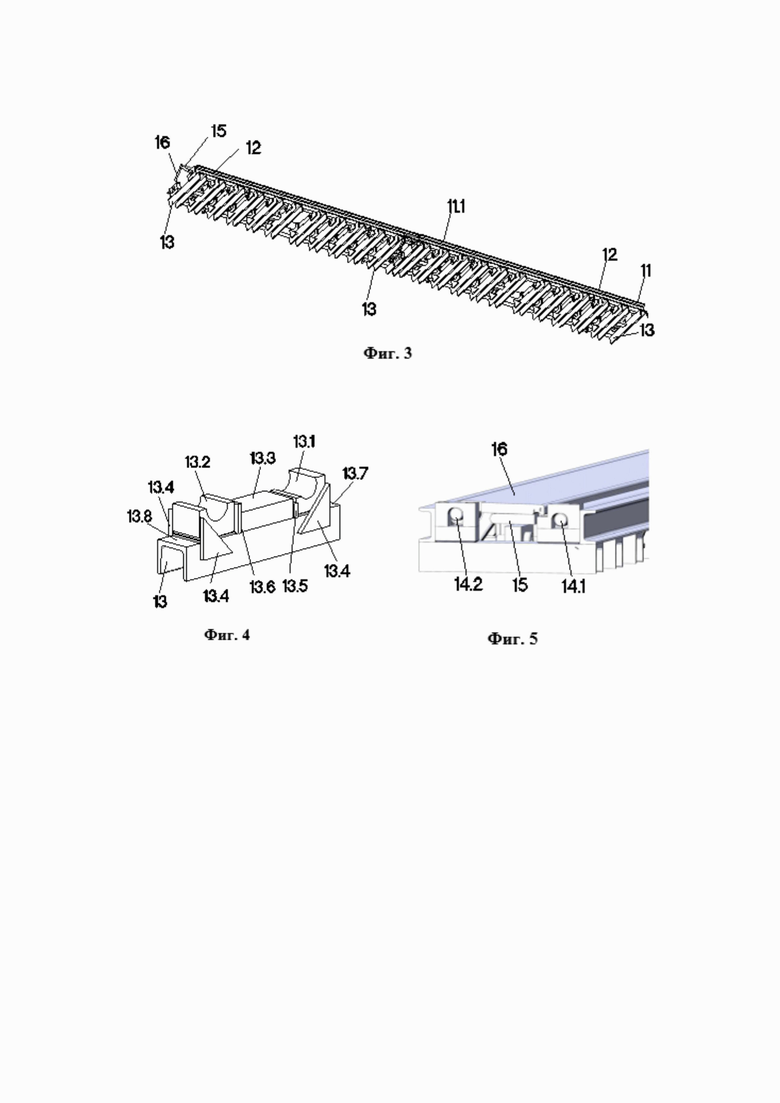
Фигура 3 представляет собой вид с нижней стороны опорной конструкции,
Фигура 4 представляет собой подшипники для валов, размещенных на коротких опорных профилях,
Фигура 5 представляет собой вид сбоку механизма замедления транспортных средств со стержнями в нижнем положении (режим ожидания),
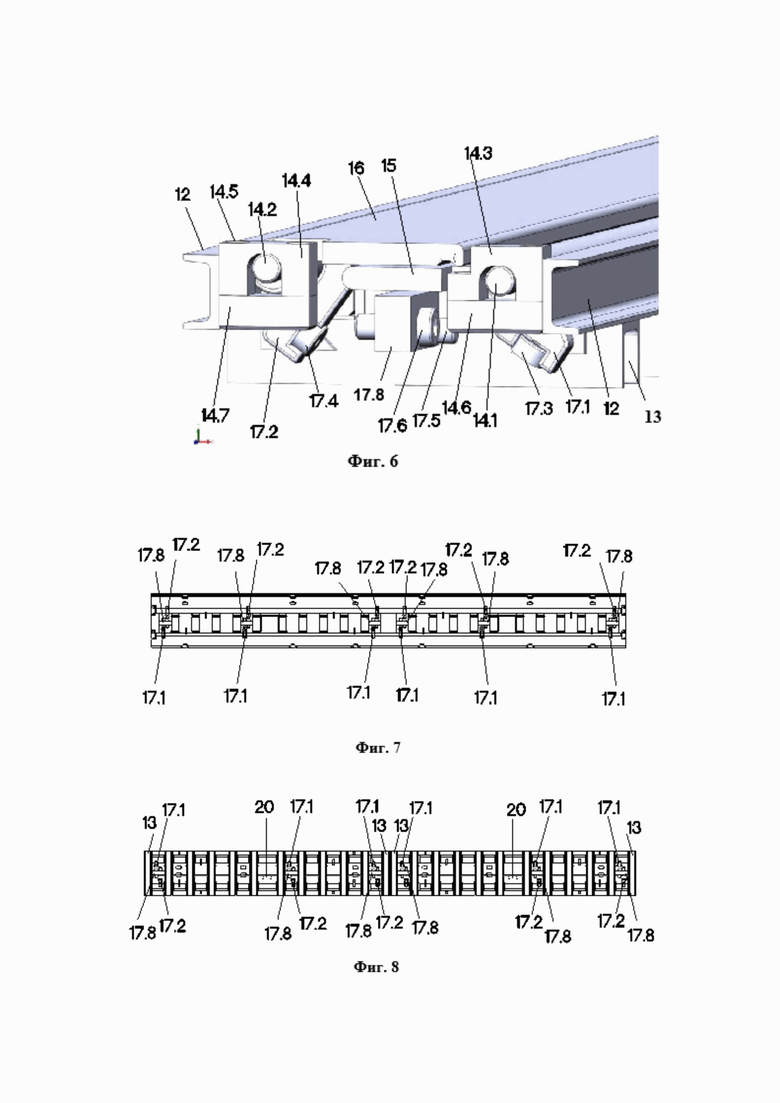
Фигура 6 представляет собой механизм замедления транспортных средств со стержнями в нижнем положении, вид сбоку с видимым поперечным сечением (увеличенная вставка),
Фигура 7 представляет собой вид сверху на опорную конструкцию со складными стержнями в раскрытом открытом положении,
Фигура 8 представляет собой вид с нижней стороны опорной конструкции,
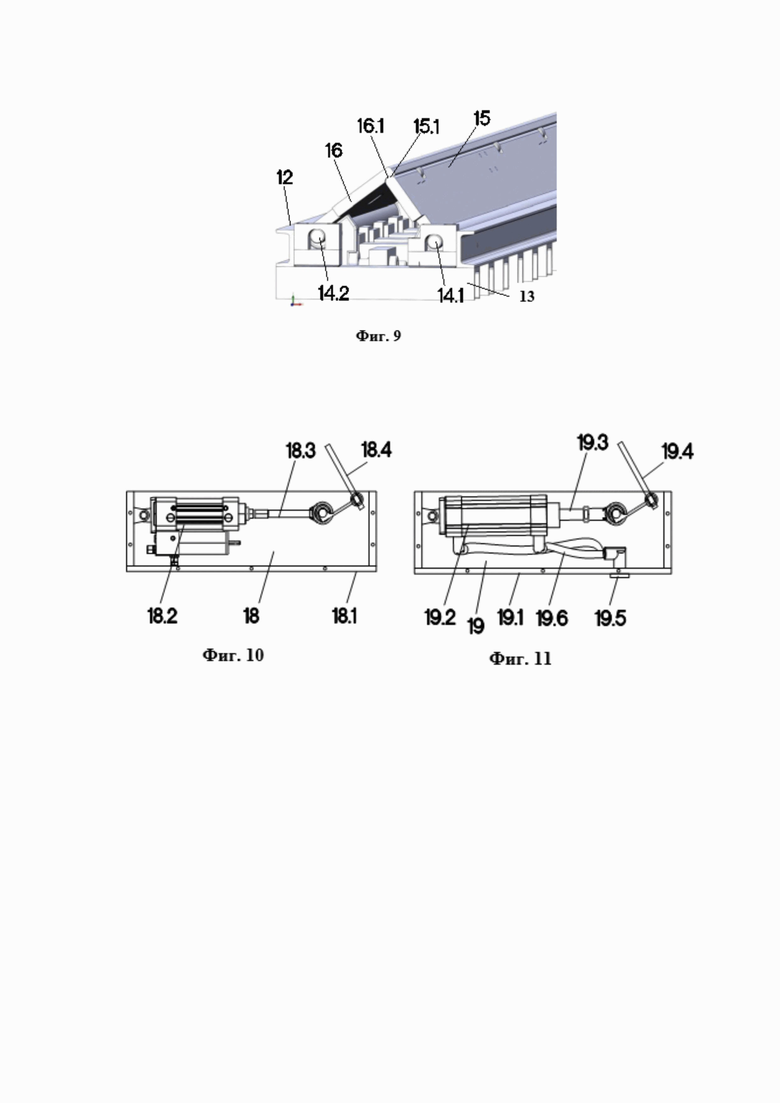
Фигура 9 представляет собой механизм замедления транспортных средств со складными стержнями в поднятом положении для замедления транспортных средств, вид сбоку (вставка),
Фигура 10 представляет собой механизм подъема стержней с электродвигателем в качестве привода (горизонтальные боковое сечение),
Фигура 11 представляет собой механизм подъема стержней пневматическим приводом (горизонтальное боковое сечение),
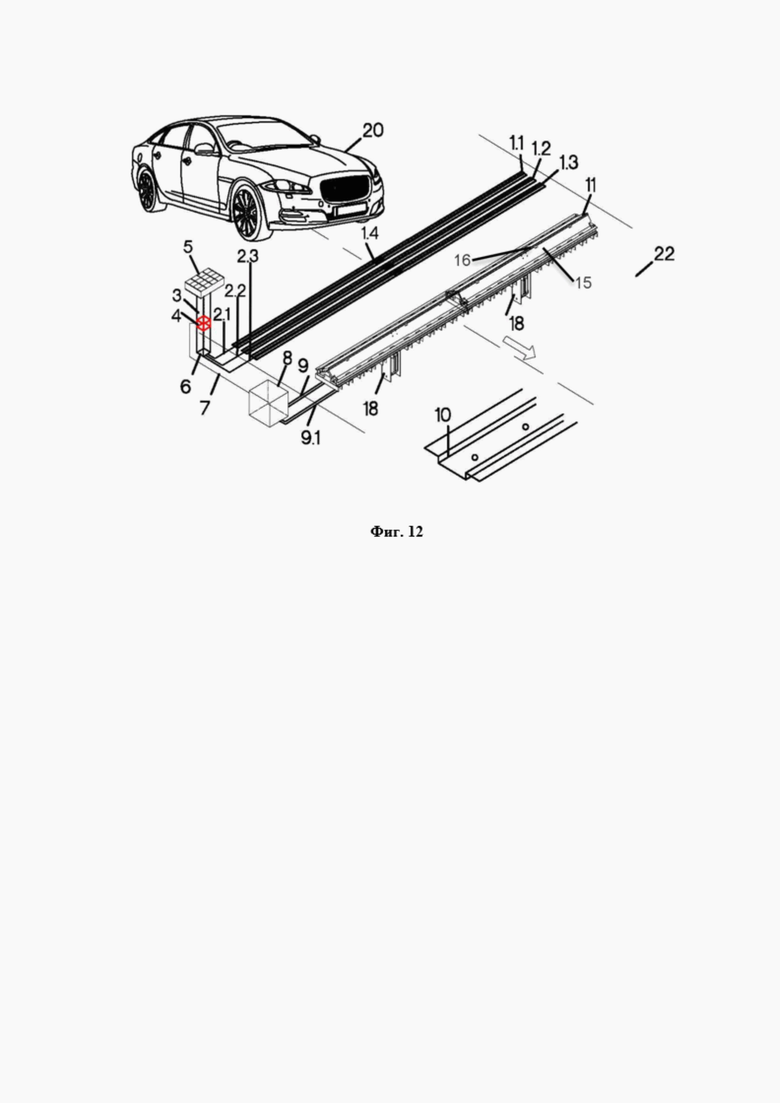
Фигура 12 представляет собой один вариант выполнения изобретения.
Согласно фиг. 1 устройство с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства состоит из стержней, которые функционируют как нажимные датчики (1.1; 1.2; и 1.3), каждый из которых оснащен датчиком акселерометра (1.4). Нажимные датчики параллельны друг другу, и расстояние между ними задано заранее. Они размещены перед складным механизмом (11) для замедления движения транспортных средств и также параллельны ему. Нажимной датчик на фиг. 2 состоит из корпуса (1.5), который содержит металлический стержень в форме Т-профиля (1.6), который своим основанием (1.7) лежит над встроенным резиновым основанием (1.11), в то время как вертикальная часть металлического стержня (1.8) частично выходит из металлического корпуса (1.5) и закреплена сбоку с помощью передней верхней резиновой части (1.9) и задней верхней резиновой части (1.10), ниже которой каналы (1.12) в частности могут быть оставлены свободными. Отмеченные соединительные провода (2.1, 2.2 и 2.3), размещенные в канале, показанном на фиг. 1, соединяют датчики акселерометра (1.4) с контроллером (4), расположенным в корпусе (3), который на его верхней части возможно оснащен фотоэлектрической панелью (5), а снизу посредством вилки (6) она подключена к электросети. Активация сложенного складного механизма (11) осуществляется с помощью контроллера (4) через кабели (7). Складной механизм (11) (Фигура 3) состоит из опорной конструкции (11.1), состоящей из коротких опорных профилей (13). Два подшипника (13.1 и 13.2), между которыми прикреплен дальномер (13.3), размещены на верхней поверхности коротких опорных профилей (фиг.4). Подшипники для валов (14.1 и 14.2) соответственно. Подшипники (13.1 и 13.2) фиксируются на месте с помощью боковых фиксированных стопорных элементов (13.4) с обеих сторон, а с обратной стороны они поддерживаются длинными профилями (12). Прямоугольные анкеры (13.5) и (13.6) возможно могут быть размещены между подшипниками (13.1 и 13.2) и дальномером (13.3) на верхней поверхности короткого опорного профиля (13). Длинные профили (12) (Фигура 6) приварены на концах коротких опорных профилей (13), создавая прочную и компактную опорную конструкцию (11.1). Вал (14.1) нижнего складного стержня (15) и вал (14.2) верхнего складного стержня (16) установлены на подшипниках (Фиг. 5). Два вала, указанные на их концах, имеют уменьшенный диаметр.
Эти валы лежат на нижних анкерах (14.6 и 14.7) (Фиг. 6), которые закреплены на крайних коротких опорных профилях (13) с обеих сторон, на которые не установлены подшипники (13.1 и 13.2). Концы с уменьшенным диаметром валов (14.1 и 14.2) размещены на нижних анкерах (14.6) и (14.7), которые крепятся винтами к верхним креплениям (14.3) и (14.4). С помощью этого конструктивного решения для крепления валов (14.1 и 14.2) мы также фиксируем нижний складной стержень (15) и верхний складной стержень (16). Именно такое расположение подшипников (13.1 и 13.2) позволяет валам (14.1 и 14.3) выдерживать наибольшую силу. Нижний складной стержень (15) и верхний складной стержень (16), показанные на Фиг. 9 и Фиг. 6, имеют двухкомпонентные механизмы ограничения их движения - стопоры, состоящие из движущихся частей (17.1 и 17.2), которые своими верхними концами приварены к валам (14.1) и (14.2), а на нижнем конце имеют неподвижные части с широкими участками (17.3 и 17.4). Во время подъема нижнего складного стержня (15) и верхнего складного стержня (16) стопоры касаются винтов с широкой головкой (17.5) и (17.6), привинченные к опорным элементам (17,8), которые приварены поперечно между двумя короткими опорными профилями на самих коротких профилях, показанных на фиг. 7 и фиг. 8. В одном варианте выполнения изобретения, описанном на фиг. 6, винты с широкой головкой (17.5 и 17.6) размещены в опорном элементе (17.8), а секции с широкими участками (17.3 и 17.4) размещены в стопорах (17.1 и 17.2). Таким образом, можно регулировать диапазон перемещения нижнего складного стержня (15) и верхнего складного стержня (16) во время их подъема, что позволяет регулировать угол, при котором верхний складной стержень (16) остается со своей канавкой, выполненной на нижней поверхности (16.1) на стороне переднего края (15.1) нижнего складного стержня (15), что видно на фиг. 9. Подъемный механизм (18) (фиг. 10) нижнего складного стержня использует электродвигатель в качестве привода (18.2), который напрямую подключен к контроллеру (4) на фигуре 1. В качестве возможного решения, показанного на фиг. 11, для этой цели используется пневматический привод (19.2), который управляется контроллером (4) и через компрессор (8) на фиг. 1, через воздушные шланги (9.1) и механизм (19), поднимает нижний складной стержень.
ОПИСАНИЕ ВАРИАНТА ВЫПОЛНЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
На фиг.12 представлен один вариант выполнения изобретения «Устройство с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства», в отношении которого подана заявка на патент, включающий стержни (1.1, 1.2 и 1.3), оснащенные акселерометрами (1.4), функционирующими в качестве нажимных датчиков, которые передают информацию в контроллер (4), немедленно определяющий скорость транспортного средства (20), а затем выдает приводу с электродвигателем или пневматическим приводом команду на подъем складного механизма (11) для инициализации снижения скорости в случаях, когда транспортное средство движется со скоростью, превышающей запрограммированную в контроллере (4), или оставить его в нижнем режиме ожидания, т.е. не поднимать складной механизм снижения скорости, если транспортное средство движется со скоростью, меньшей запрограммированной в контроллере (4). Складной механизм (11) установлен сверху основания (10), которое установлено на проезжей части (22) и установлено на опорной конструкции (11.1) с подшипниками для валов, на которых приварены стопоры, при этом приводы которые могут быть с электродвигателем или с пневматическим приводом, активируют подъемный механизм, который поднимает нижний складной стержень (15), который одновременно поднимает верхний складной стержень (16) до высоты, определяемой стопорами (17.1 и 17.2), где передний боковой край нижнего складного стержня (15) входит в канавку, выполненную на нижней поверхности верхнего складного стержня (16), образуя угловое позиционирование, которое допускает силу удара колес через верхний складной стержень механизма, который должен передаваться под заданным углом на нижнем стержне, что обеспечивает максимальную прочность и долговечность в отношении силы колес транспортных средств, движущихся со скоростью, превышающей скорость, запрограммированную в контроллере. После заданного периода времени устройство возвращается в исходное положение ожидания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРА КРУТЯЩЕГО МОМЕНТА И ТЕЛЕЖКА ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2589191C2 |
| ЭСКАЛАТОР ИЛИ ТРАВОЛАТОР С НИЖНИМ ЛИСТОМ | 2012 |
|
RU2588556C2 |
| Гаситель поперечных колебанийВАгОНА пОдВЕСНОй КАНАТНОй дОРОги | 1979 |
|
SU812624A1 |
| ЛИФТОВАЯ УСТАНОВКА | 2007 |
|
RU2443619C2 |
| ПЕРЕКЛЮЧАТЕЛЬ НАГРУЗКИ СТУПЕНЧАТОГО ВЫКЛЮЧАТЕЛЯ | 1996 |
|
RU2156513C2 |
| ШАССИ С ПРИВОДОМ ДЛЯ РЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ, В ЧАСТНОСТИ ПОВОРОТНЫХ ТЕЛЕЖЕК ДЛЯ НИЗКОРАМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2322366C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2090389C1 |
| РАСКЛАДНАЯ АНТЕННА | 2006 |
|
RU2304328C1 |
| Анализатор сопротивлений систем промышленного электроснабжения | 1985 |
|
SU1282021A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА АНАЛИТИЧЕСКОГО КОНТРОЛЯ ЖИДКИХ ПРОБ | 2009 |
|
RU2419776C2 |
Изобретение относится к устройству с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства. Устройство включает стержни (1.1, 1.2, 1.3) с акселерометрами (1.4), выполненными с возможностью функционирования в качестве нажимных датчиков, передающих информацию в контроллер (4), выполненный с возможностью немедленного определения скорости транспортного средства (20), и последующего отправления на привод с электродвигателем или пневматическим приводом команду поднять складного механизма (11) в случае, если транспортное средство движется со скоростью, превышающей скорость, запрограммированную в контроллере. Складной механизм (11) размещен на основании (10), которое установлено на проезжей части (22) и на опорной конструкции (11.1) с подшипниками вала, на которых приварены стопоры. Приводы с электродвигателем или пневмоприводном выполнены с возможностью активирования подъемного механизма, который выполнен с возможностью поднятия нижнего складного стержня (15), который выполнен с возможностью во время своего подъема одновременно поднимать верхний складной стержень (16) до высоты, определяемой стопорами (17.1 и 17.2). Передний боковой край нижнего складного стержня (15) входит в канавку, расположенную на нижней поверхности верхнего стержня (16), образуя угловое позиционирование, которое выполнено с возможностью передачи силы удара колес на верхний стержень под заданным углом на нижний стержень. Технический результат - обеспечение максимальной прочности и устойчивости устройства при ударе колес от проезжающих транспортных средств со скоростью, превышающей скорость, запрограммированную в контроллере. 8 з.п. ф-лы, 12 ил.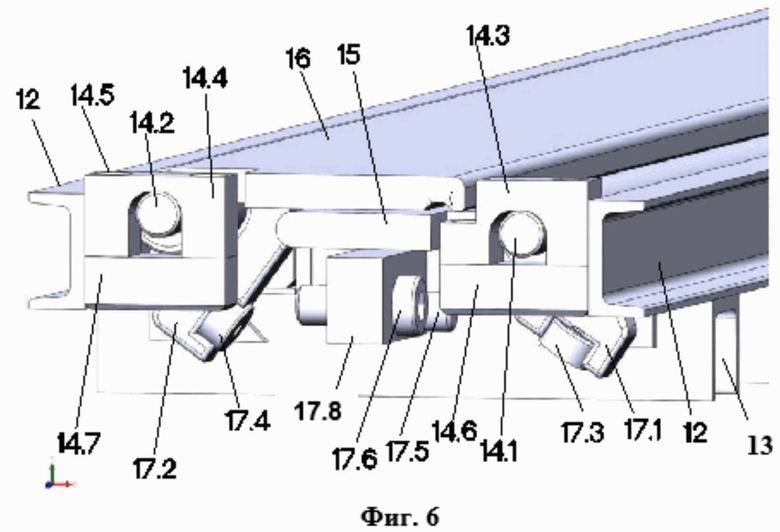
1. Устройство с электрическим или пневматическим приводом складного механизма для стимулирования снижения скорости транспортного средства, отличающееся тем, что оно включает стержни (1.1, 1.2, 1.3) с акселерометрами (1.4), выполненными с возможностью функционирования в качестве нажимных датчиков, передающих информацию в контроллер (4), выполненный с возможностью немедленного определения скорости транспортного средства (20), и последующего отправления на привод с электродвигателем или пневматическим приводом команду поднять складного механизма (11) в случае, если транспортное средство движется со скоростью, превышающей скорость, запрограммированную в контроллере, или оставить его в режиме ожидания, то есть не поднимать складной механизм снижения скорости, если транспортное средство движется со скоростью, которая ниже запрограммированной в контроллере, при этом складной механизм (11) размещен на основании (10), которое установлено на проезжей части (22) и на опорной конструкции (11.1) с подшипниками вала, на которых приварены стопоры, при этом приводы с электродвигателем или пневмоприводном выполнены с возможностью активирования подъемного механизма, который выполнен с возможностью поднятия нижнего складного стержня (15), который выполнен с возможностью во время своего подъема одновременно поднимать верхний складной стержень (16) до высоты, определяемой стопорами (17.1 и 17.2), при этом в частности передний боковой край нижнего складного стержня (15) входит в канавку, расположенную на нижней поверхности верхнего стержня (16), образуя угловое позиционирование, которое выполнено с возможностью передачи силы удара колес на верхний стержень под заданным углом на нижний стержень, обеспечивая максимальную прочность и долговечность при ударе колесами транспортных средств, которые движутся со скоростью, превышающей запрограммированную в контроллере, и через заданное время устройство возвращается в исходное положение ожидания.
2. Устройство по п. 1, отличающееся тем, что стержни (1.1, 1.2 и 1.3), оснащенные акселерометрами (1.4), выполненными с возможностью функционирования в качестве нажимных датчиков, расположены параллельно друг другу, имеют заданное расстояние между ними и расположены перед сложенным складным механизмом (11) и параллельны ему.
3. Устройство по пп. 1 и 2, отличающееся тем, что стержень, который является нажимным датчиком, состоит из корпуса (1.5), в котором установлен металлический стержень в форме Т-профиля (1.6), который своим основанием (1.7) лежит над встроенным резиновым основанием (1.11), а вертикальная часть металлического стержня (1.8) частично выходит из металлического корпуса (1.5) и закреплена сбоку передней верхней резиновой частью (1.9) и задней верхней резиновой частью (1.10), под которой, в частности, расположены каналы (1.12).
4. Устройство по пп. 1, 2 и 3, отличающееся тем, что акселерометры (1.4) соединены проводами (2.1, 2.2, 2.3) с контроллером (4), который размещен в корпусе (3), на верхней части которого установлена фотоэлектрическая панель (5), а в нижней части установлена вилка (6) для подключения к сети, посредством чего контроллер (4) через кабели (7) выполнен с возможностью активирования приводом перекрывающихся складных механизмов (11).
5. Устройство по пп. 1, 2, 3 и 4, отличающееся тем, что складной механизм (11), содержащий опорную конструкцию (11.1), состоящую из коротких опорных профилей (13), на верхней поверхности которых размещены два подшипника (13.1 и 13.2) для валов (14.1 и 14.2), между которыми размещен дальномер (13.3), в котором подшипники (13.1 и 13.2) закреплены посредством боковых крепежных элементов (13.4) с обеих сторон, а на задних вертикальных сторонах они зафиксированы длинными профилями (12).
6. Устройство по п. 5, отличающееся тем, что между подшипниками (13.1 и 13.2) и дальномером (13.3) на верхней поверхности короткого опорного профиля (13) дополнительно размещены прямоугольные упрочнители (13.5) и (13.6), а к концам (13.7) и (13.8) коротких опорных профилей (13) приварен длинные профили (12), выполненные с возможностью создания прочной и компактной опорной конструкции (11.1).
7. Устройство по п. 6, отличающееся тем, что упомянутый вал (14.1) нижнего складного стержня (15) и вал (14.2) верхнего складного стержня (16) расположены на подшипниках (13.1 и 13.2), при этом два упомянутых вала на концах имеют уменьшенный диаметр и расположены на нижних анкерах (14.6 и 14.7), которые закреплены на крайних коротких опорных профилях (13), на которых не установлены подшипники (13.1 и 13.2), а на концах с уменьшенным диаметром валов (14.1 и 14.2) установлены верхние крепления (14.3) и (14.4), выполненные с возможностью фиксации нижнего складного стержня (15) и верхнего складного стержня (16).
8. Устройство по п. 7, отличающееся тем, что нижний складной стержень (15) и верхний складной стержень (16) содержат двухсторонние стопорные механизмы, выполненные с возможностью ограничения их перемещения - стопоры, состоящие из подвижных стопоров (17.1 и 17.2), которые своими верхними концами приварены к валам (14.1) и (14.2), а на нижнем конце имеют встроенные секции с широкими участками (17.3 и 17.4), которые во время подъема нижнего складного стержня (15) и верхнего складного стержня (16) касаются винтов с широкой головкой (17.5) и (17.6), ввинченной в опорные элементы (17.8), которые приварены поперечно между двумя короткими опорными профилями на самих профилях.
9. Устройство по п. 1, отличающееся тем, что в подъемном механизме (18) нижнего складного стержня в качестве привода используется электродвигатель (18.2), непосредственно соединенный с контроллером (4), и в качестве дополнительного решения для той же цели используется пневматический привод (19.2), в котором контроллер (4), в частности, с компрессором (8) через воздушные шланги (9.1) и механизм (19) выполнен с возможностью подъема нижнего складного стержня.
| CN 104594244 B, 04.01.2017 | |||
| US 20080056818 A1, 06.03.2008 | |||
| KR 100878984 B1, 14.01.2009 | |||
| US 2016312416 A1, 27.10.2016 | |||
| CN 202090300 U, 28.12.2011. |

