РОДСТВЕННЫЕ ЗАЯВКИ
[0001] В данной заявке заявлен приоритет предварительных заявок на Патент США 62/167,808 и 62/167,814, обе из которых поданы 28 мая 2015 г. Все содержание обеих предварительных заявок включено сюда посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Варианты воплощения изобретения обеспечивают горные машины, включающие в себя устройство накопления энергии, такое как маховик. В частности, некоторые варианты воплощения изобретения обеспечивают применение системы маховикового накопителя энергии в шарнирно-сочлененной машине фронтальной погрузки на резиновых шинах, имеющей привод с переключаемым магнитным сопротивлением.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Горное оборудование обычно работает в высоко цикличных применениях, где изменения направления и рутинная деятельность по запуску и прекращению работы частая. Эти циклические действия могут быть использованы для раскапывания, загрузки, перемещения и отгрузки минералов.
[0004] Для погрузчиков или грузовиков на резиновых шинах эти циклы могут возникнуть в течение периода времени приблизительно от 30 секунд и до более приблизительно 3-4 минут, в зависимости от применения. Различия между продолжительностями цикла в различных применениях могут быть связаны с длиной откатки (расстояние, которое машина проходит между точкой, где машина собирает материал, и точкой, где машина складывает материал).
[0005] Например, для ковшового фронтального погрузчика загрузка грузовиков в карьере, длина откатки может составлять приблизительно 30 метров. Следовательно, если ковшовый фронтальный погрузчик обладает скоростью машины приблизительно менее 15 километров в час («км/ч»), ковшовый фронтальный погрузчик может завершить цикл в течение менее 30 секунд. Однако, для шахтного погрузчика, работающего в условиях блокового или панельного обрушения, длина откатки может превышать приблизительно 300 метров. Таким образом, если шахтный погрузчик обладает скоростью машины приблизительно 20 км/ч, то шахтный погрузчик может завершить цикл приблизительно за 4 минуты.
[0006] Аналогично, тяговое оборудование, такое как самоходные вагонетки, периодически выполняет задачу извлечения материала из горной машины, вывозку материала для дробления или решение задачи загрузки-разгрузки материала, такое как конвейер, а затем возвращается к горной машине для сбора другой загрузки.
[0007] Крупные экскаваторы и драглайны также работают циклически. Например, экскаваторы и драглайны копают и выгружают в ходе циклического движения, когда направление движения машины меняется на обратное, к исходному положению, при ускорении и замедлении крупной массы транспортного средства.
[0008] Следовательно, существуют возможности повышения КПД циклического режима работы горного оборудования путем использования накопления энергии. Одна возможность включает в себя захват кинетической энергии при движении машины, накопление энергии и использование сохраненной энергии для следующей стадии движения цикла. Другая возможность включает в себя сглаживание максимальной силовой нагрузки источника электропитания за счет накопления энергии от источника электропитания в моменты низкой нагрузки и использования накопленной энергии для содействия источнику электропитания в приведении в действие максимальной нагрузки. Эта функциональность позволяет уменьшить размеры источника электропитания, который может представлять собой дизельный двигатель, трансформатор, или источник питания, снабженный стелющимся кабелем, со снижением затрат на установку и техническое обслуживание. Также существует возможность, при таком же выходе КПД, повысить общие технические характеристики этого типа машины, при заданном энергопотреблении.
[0009] Следовательно, в вариантах воплощения изобретения использовано устройство для накопления энергии, которое включает в себя маховик или другую форму системы накопления кинетической энергии (kinetic energy storage system, «KESS»). KESS может быть использована с технологией переключаемого магнитного сопротивления (switched reluctance, «SR») для накопления энергии в кинетической форме, для дальнейшего использования. Таким образом, варианты воплощения изобретения включают в себя один или более KESS, с применением в высокомощных горных перевозках, которые могут быть использованы на наземных машинах и на подземных машинах, включающих в себя SR-технологию.
[0010] В некоторых вариантах воплощения машины, включающие в себя KESS, как было описано в настоящей работе, могут включать в себя дизельный двигатель в качестве первичного источника электропитания. В этом варианте воплощения, KESS выполняет функцию усреднения и повышения мощности, с использованием, как энергии торможения, и так энергии, подаваемой от выходного вала дизельного двигателя. Однако, следует понимать, что KESS также может быть использован с другими (не дизельными) источниками электропитания. Как будет описано более подробной ниже, KESS может содействовать двигателю внутреннего сгорания во время максимальных нагрузок и может работать от двигателя внутреннего сгорания в ходе падения нагрузок. Следовательно, при наличии KESS надлежащих размеров, KESS может быть использована для достижения полного усреднения мощности, при которой двигатель внутреннего сгорания работает непрерывно при почти постоянной нагрузке (например, без изменений). Использование усреднения мощности, обеспечиваемого с помощью KESS, позволяет уменьшить размеры двигателя внутреннего сгорания. Аналогично, усреднение мощности может увеличить срок службы двигателя внутреннего сгорания и максимизировать экономию топлива за счет запуска двигателя внутреннего сгорания в режиме постоянной выходной мощности.
[0011] Кроме того, в некоторых вариантах воплощения, дизельный двигатель может быть заменен другим источником электропитания, таким как батарея. В частности, полное усреднение мощности обеспеченное системой перевозки с KESS (как разработанной с дизельным двигателем) может оптимизировать решение для батареи для некоторых машин, таких как погрузочно-доставочная машина (load haul dump, «LHD») или самоходная вагонетка. Следует понимать, что в качестве альтернативы для дизельного двигателя (например, из-за плотности мощности жидкотопливных аккумуляторных батарей) также могут быть использованы и другие источники электропитания, такие как топливные элементы.
[0012] Например, некоторые варианты воплощения обеспечивают погрузочную машину, включающую в себя двустороннюю электрическую шину, источник электропитания, электродвигатель, систему накопления кинетической энергии и контроллер. Источник электропитания связан с двусторонней электрической шиной через первый преобразователь мощности. Электродвигатель связан с двусторонней электрической шиной через второй преобразователь мощности. Электродвигатель снабжается электроэнергией, имеющейся на двусторонней электрической шине, и работает приводной механизм, включенный в погрузочную машину. Система накопления кинетической энергии связан с двусторонней электрической шиной через третий преобразователь мощности и включает в себя маховик и переключаемый реактивный электродвигатель. Контроллер сконфигурирован для поддержания связи с системой накопления кинетической энергии и источником электропитания. Контроллер также сконфигурирован для управления системой накопления кинетической энергии в качестве первичного источника электропитания для двусторонней электрической шины и для управления источником электропитания в качестве вторичного источника электропитания для двусторонней электрической шины, когда система накопления кинетической энергии не может удовлетворять энергопотреблению на двусторонней электрической шине.
[0013] Другие варианты воплощения обеспечивают способ эксплуатации погрузочной машины. Способ включает в себя определение, с помощью контроллера, сконфигурированного для поддержания связи с системой накопления кинетической энергии и источником электропитания, включенным в погрузочную машину, энергопотребления на двусторонней электрической шине, включенной в погрузочную машину и определение, с помощью контроллера, энергии, доступной через систему накопления кинетической энергии. Способ также включает в себя управление, с помощью контроллера, системой накопления кинетической энергии в качестве первичного источника электропитания для двусторонней электрической шины, когда энергия, доступная через систему накопления кинетической энергии, удовлетворяет энергопотреблению и управление, с помощью контроллера, источником электропитания в качестве вторичного источника электропитания для двусторонней электрической шины, когда энергия, доступная через систему накопления кинетической энергии, не может удовлетворять энергопотреблению.
[0014] Дополнительные варианты воплощения обеспечивают погрузочную машину, которая включает в себя ковш, перемещаемый, по меньшей мере, в одном направлении, привод для передвижения ковша, по меньшей мере, в одном направлении, причем орган управления включает в себя механизм выбора и контроллер. Контроллер сконфигурирован для приема входного сигнала, представляющего выбор механизма выбора. В ответ на входной сигнал, контроллер сконфигурирован для определения текущего положения ковша, извлечения из памяти заданного положения переноски, сопоставления текущего положения ковша с заданным положением переноски, а когда текущее положение ковша отличается от заданного положения переноски, - автоматического управления приводом для перемещения ковша в заданное положение переноски.
[0015] Другие варианты воплощения обеспечивают способ автоматического управления погрузочной машиной. Способ включает в себя прием, с помощью контроллера, входного сигнала, представляющего выбор механизма выбора. Способ также включает в себя, в ответ на прием входного сигнала, определение, с помощью контроллера, текущего положения ковша погрузочной машины и извлечения из памяти, с помощью контроллера, заданного положения переноски. Способ также включает в себя сопоставление, с помощью контроллера, текущего положения ковша с заданным положением переноски, а когда текущее положение ковша отличается от заданного положения переноски, - автоматическое регулирование, с помощью контроллера, привода, для перемещения ковша в заданное положение переноски.
[0016] Другие аспекты изобретения станут ясными при рассмотрении подробного описания, прилагаемых чертежей и прилагаемого приложения.
краткое описание чертежей
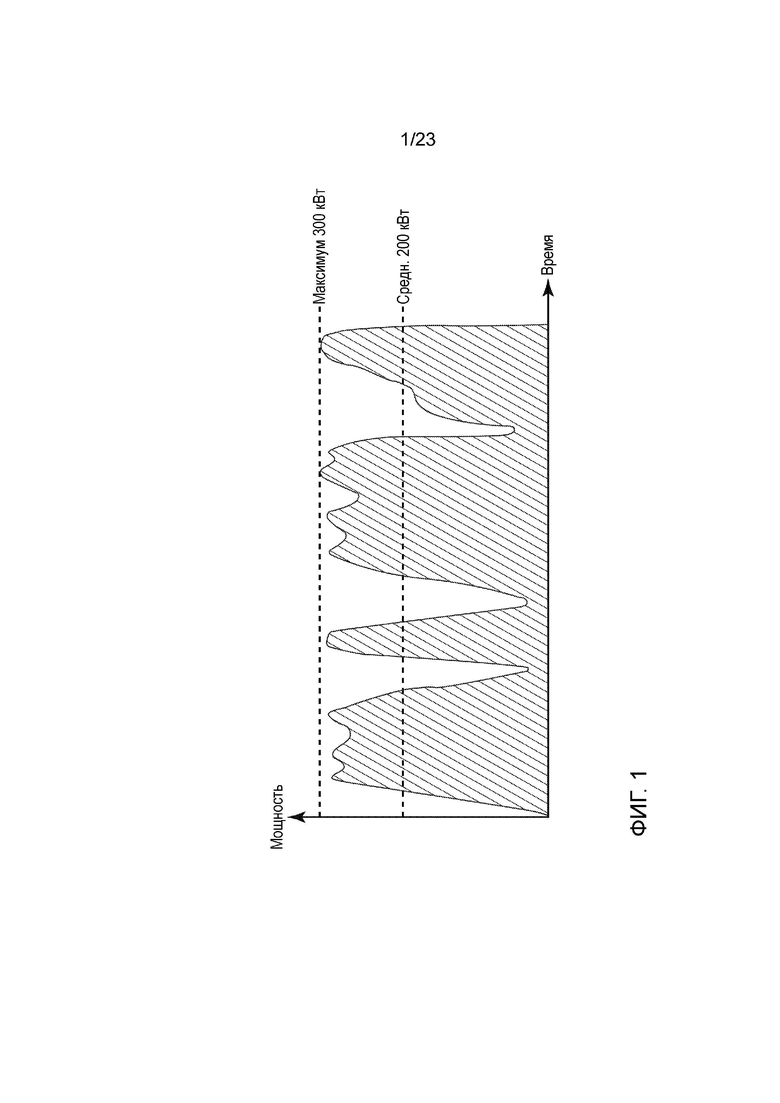
[0017] ФИГ. 1 иллюстрирует кривую мощности для системы механического привода.
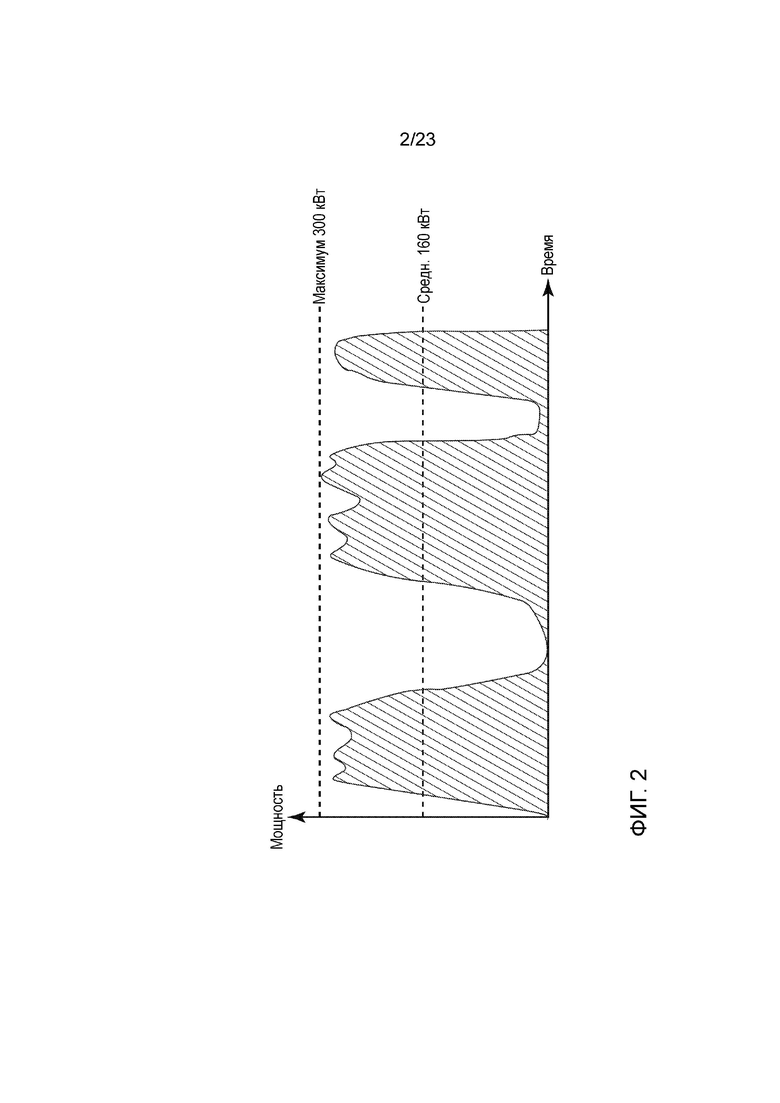
[0018] ФИГ. 2 иллюстрирует кривую мощности для системы управления переключаемым магнитным сопротивлением (switched reluctance, «SR»).
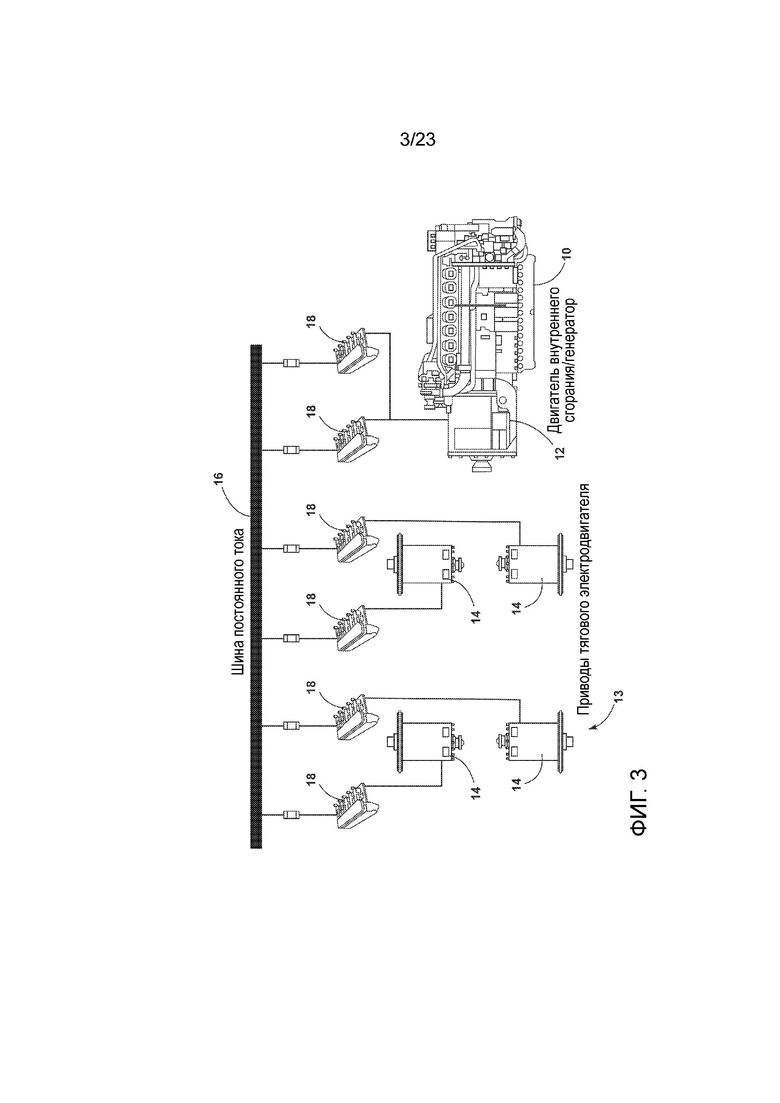
[0019] ФИГ. 3 схематически иллюстрирует архитектуру системы для дизель-гибридного SR-наземного погрузчика.
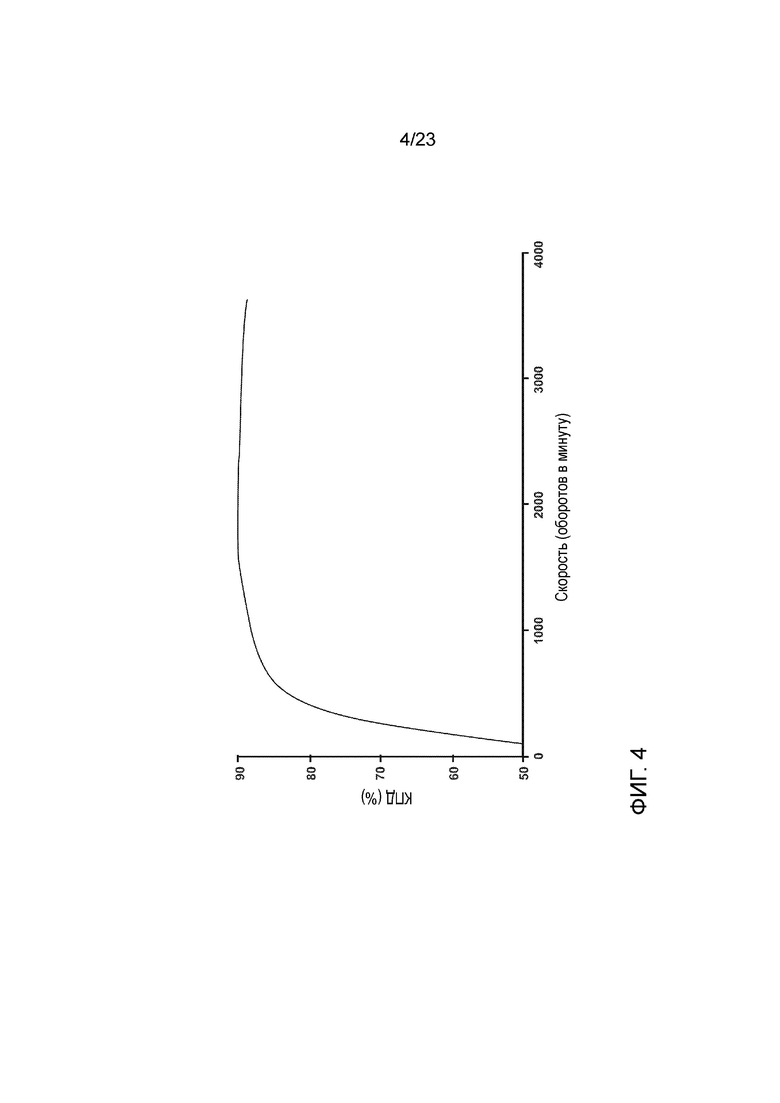
[0020] ФИГ. 4 представляет собой график кривой КПД SR-машины.
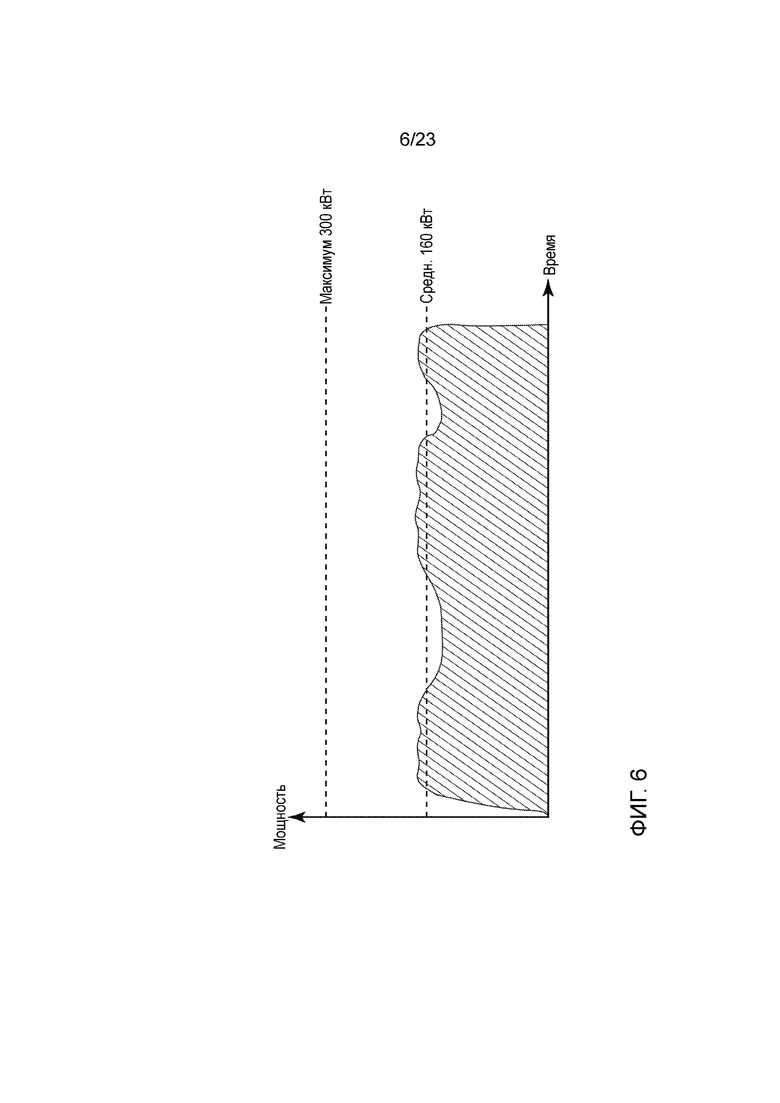
[0021] ФИГ. 5 и 6 иллюстрируют кривые мощности для системы SR-привода с системой накопления кинетической энергии (kinetic energy storage system, «KESS»).
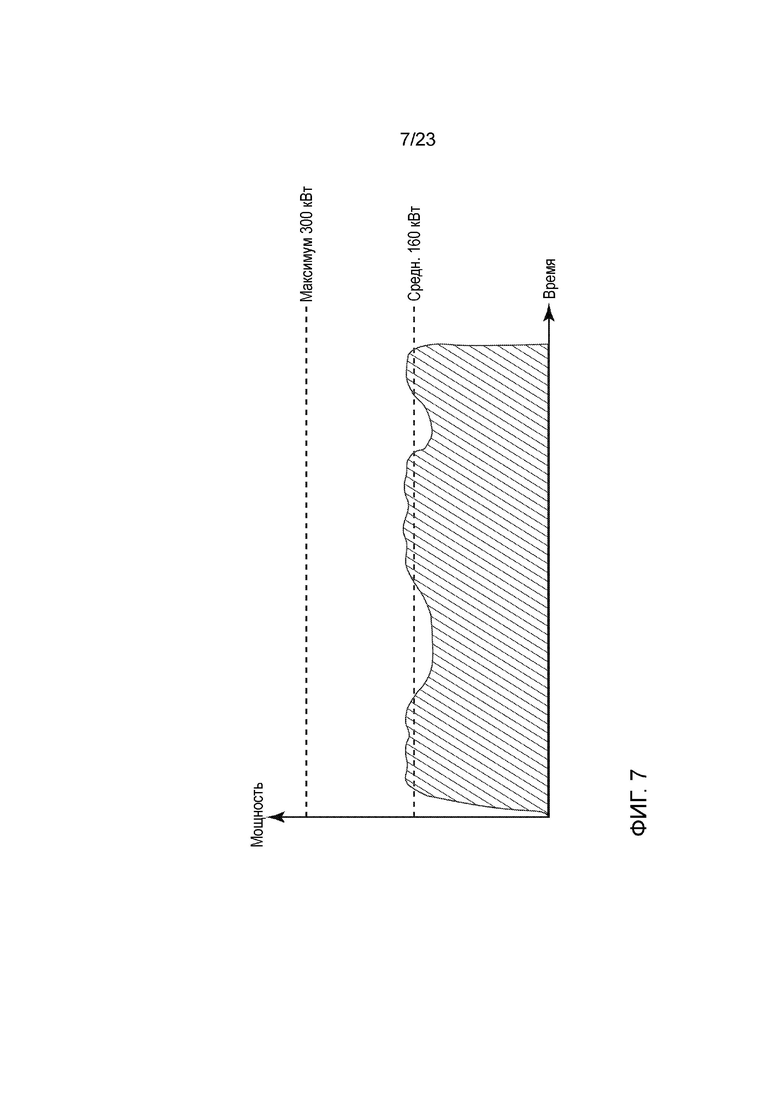
[0022] ФИГ. 7 иллюстрирует кривую мощности для системы SR-привода с KESS и батареей или топливным элементом.
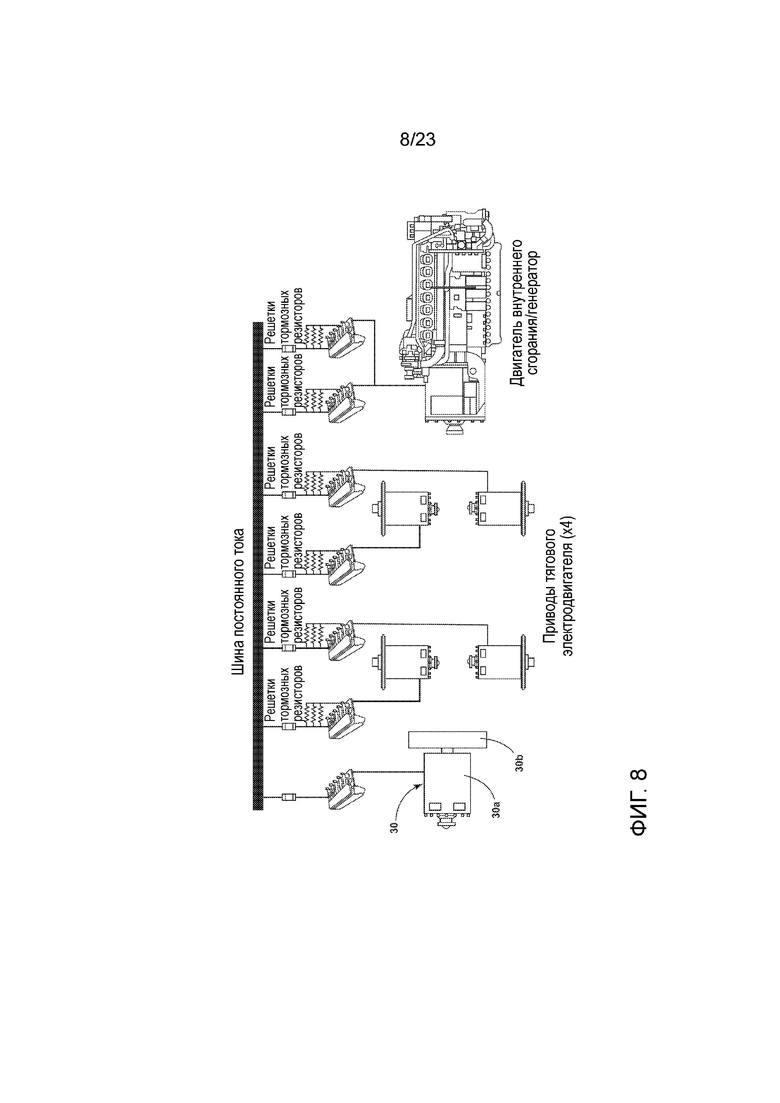
[0023] ФИГ. 8 схематически иллюстрирует архитектуру системы для системы SR-привода с KESS.
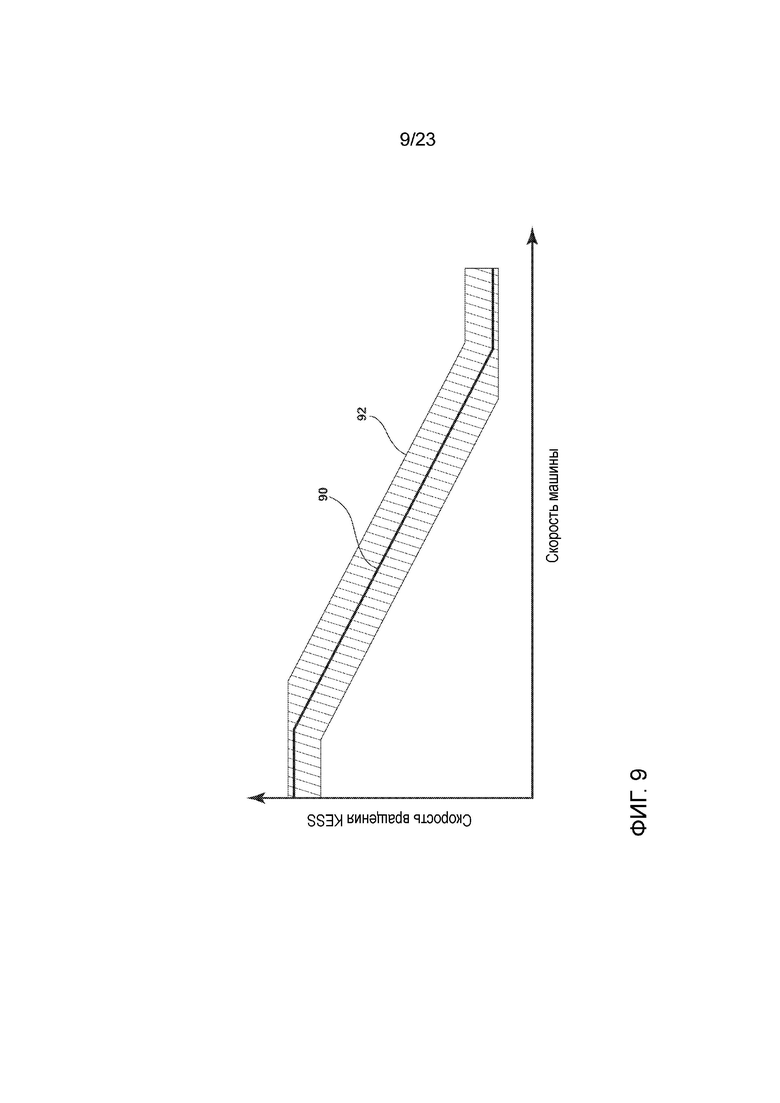
[0024] ФИГ. 9 иллюстрирует кривую контроля для KESS.
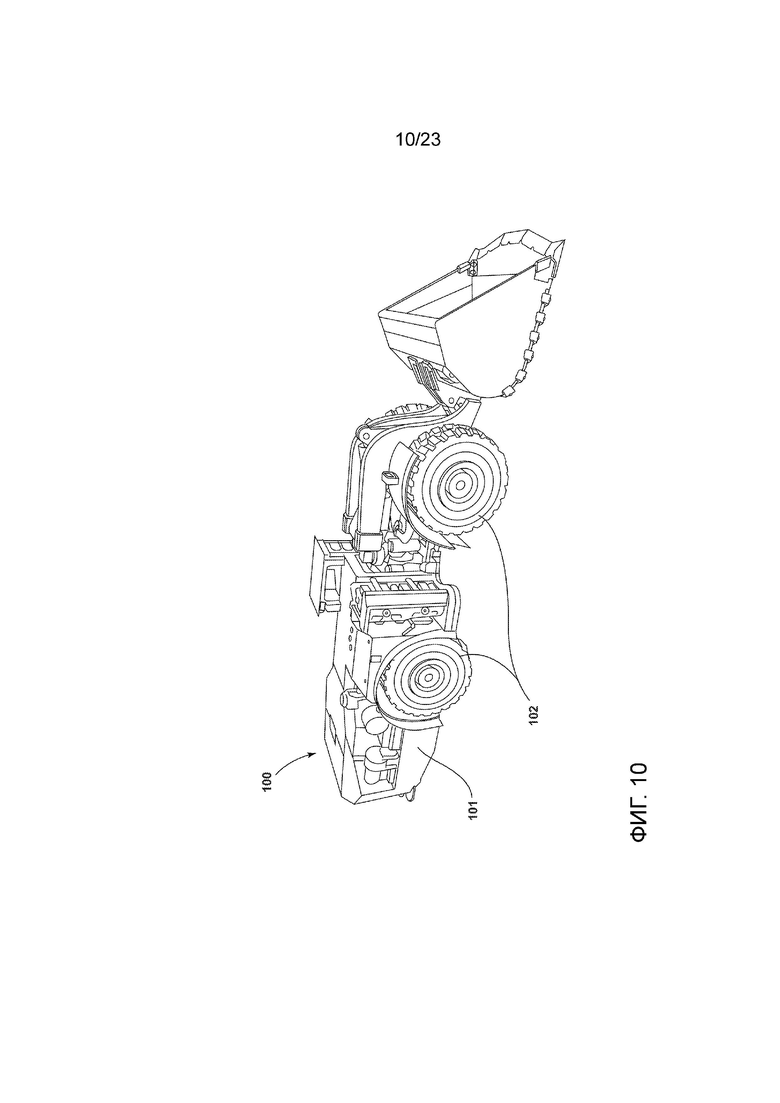
[0025] ФИГ. 10 представляет собой перспективное изображение горного оборудования, в частности, ковшового фронтального погрузчика.
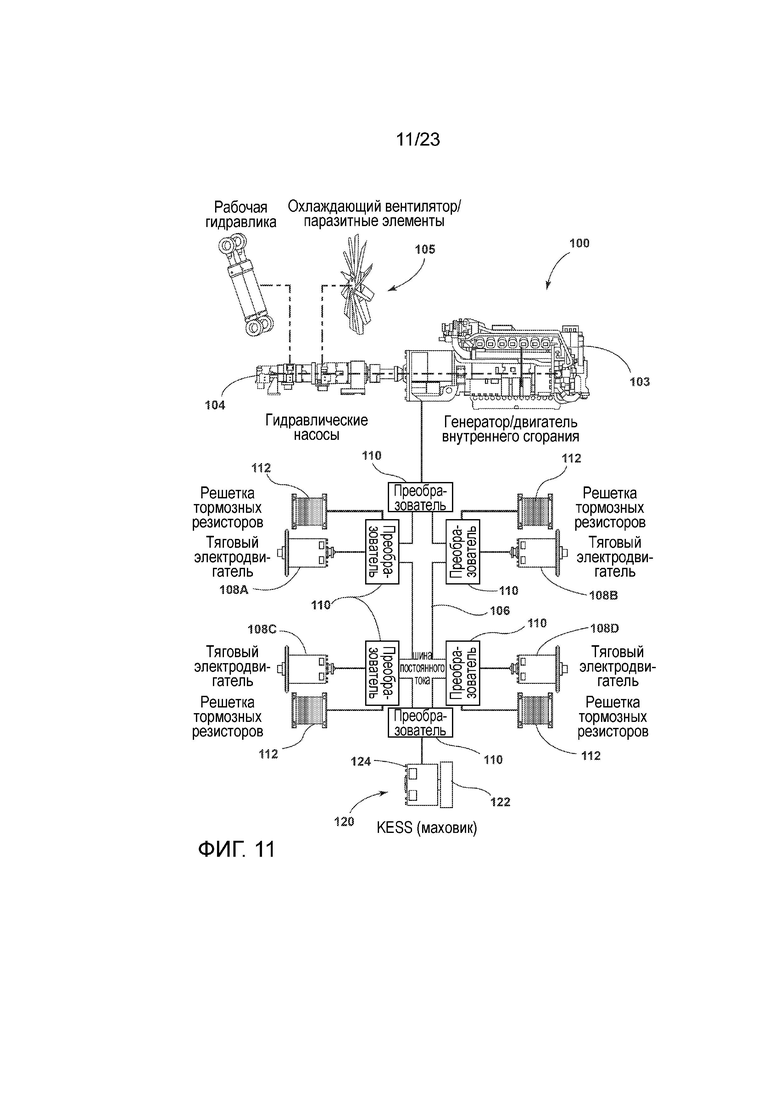
[0026] ФИГ. 11 схематически иллюстрирует функциональные элементы горного оборудования по ФИГ. 10.
[0027] ФИГ. 12 схематически иллюстрирует контроллер, включенный в горном оборудовании по ФИГ. 10.
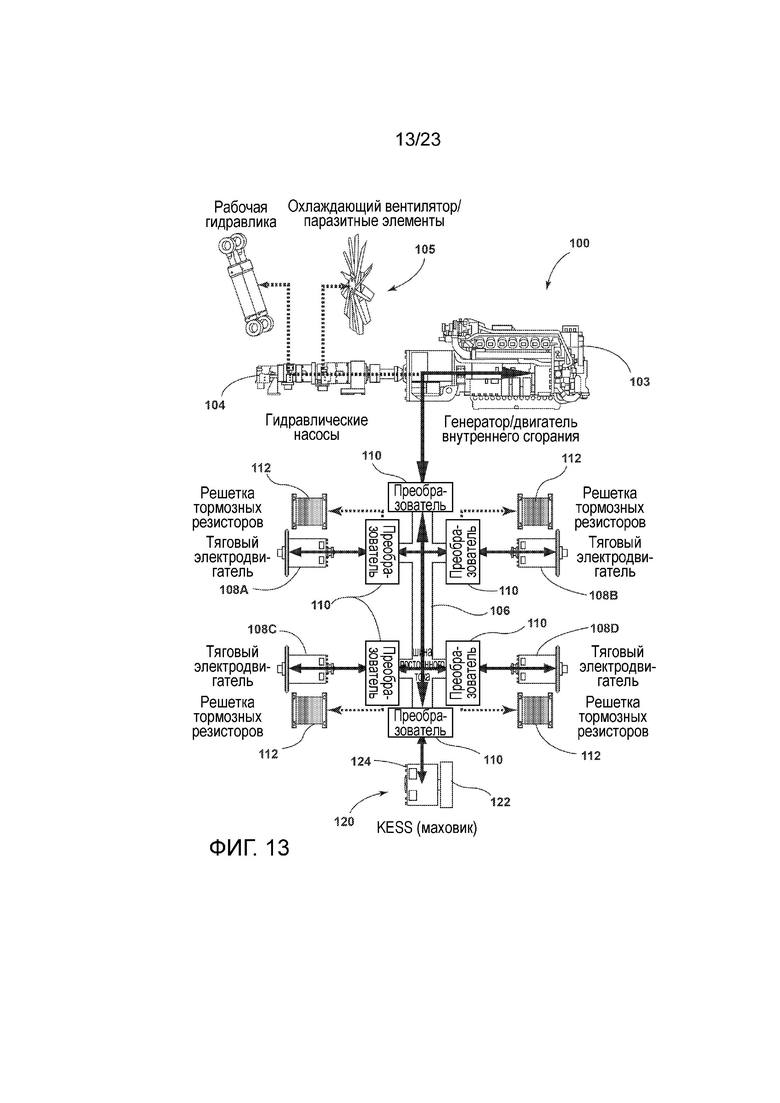
[0028] ФИГ. 13 схематически иллюстрирует возможный поток мощности в оборудовании по ФИГ. 10.
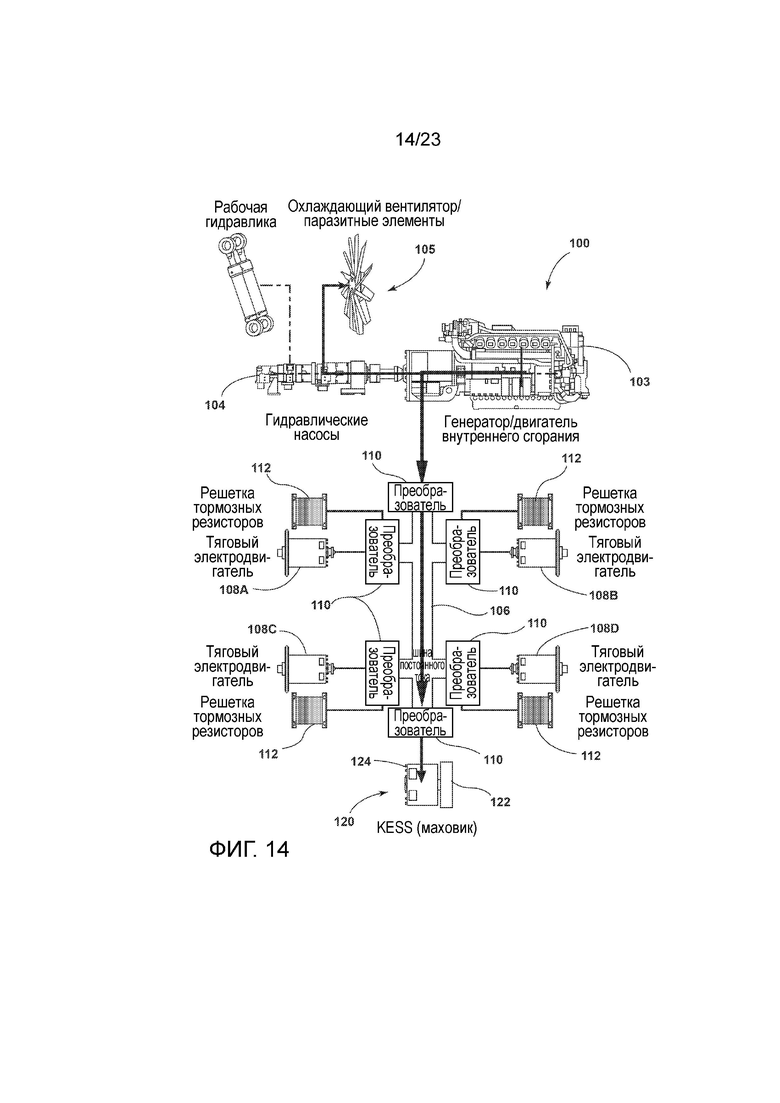
[0029] ФИГ. 14 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для зарядки системы накопления кинетической энергии.
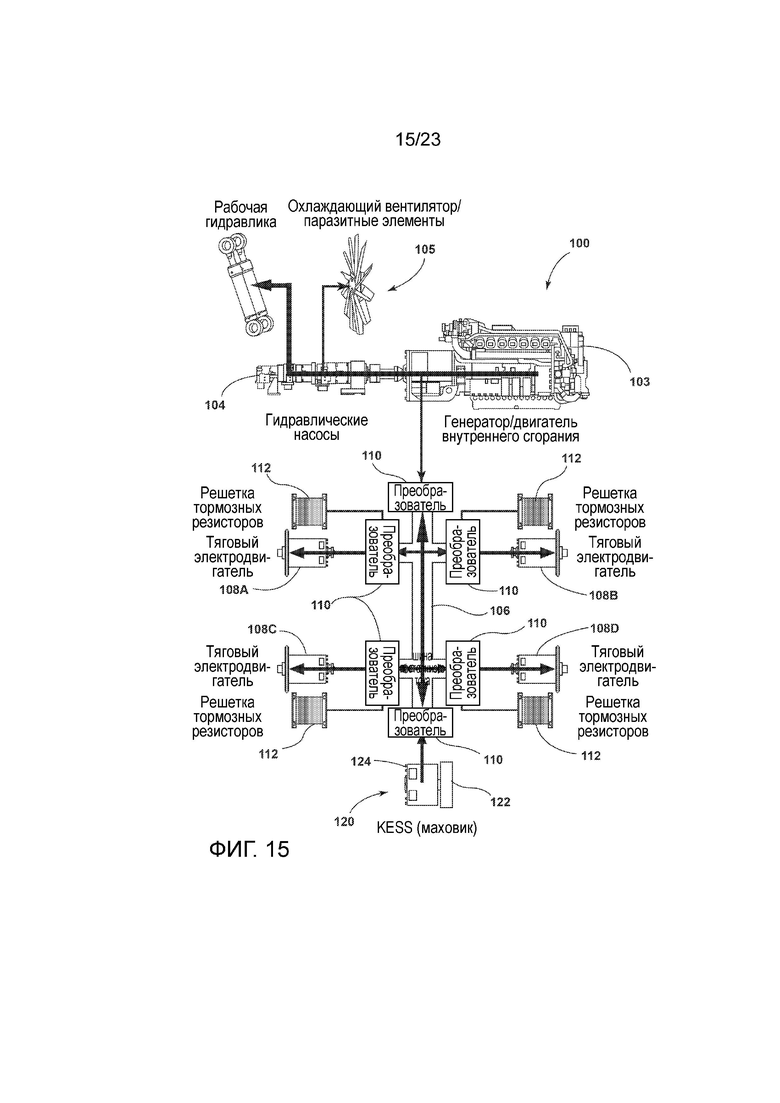
[0030] ФИГ. 15 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для выполнения тягового усилия, с использованием системы накопления кинетической энергии.
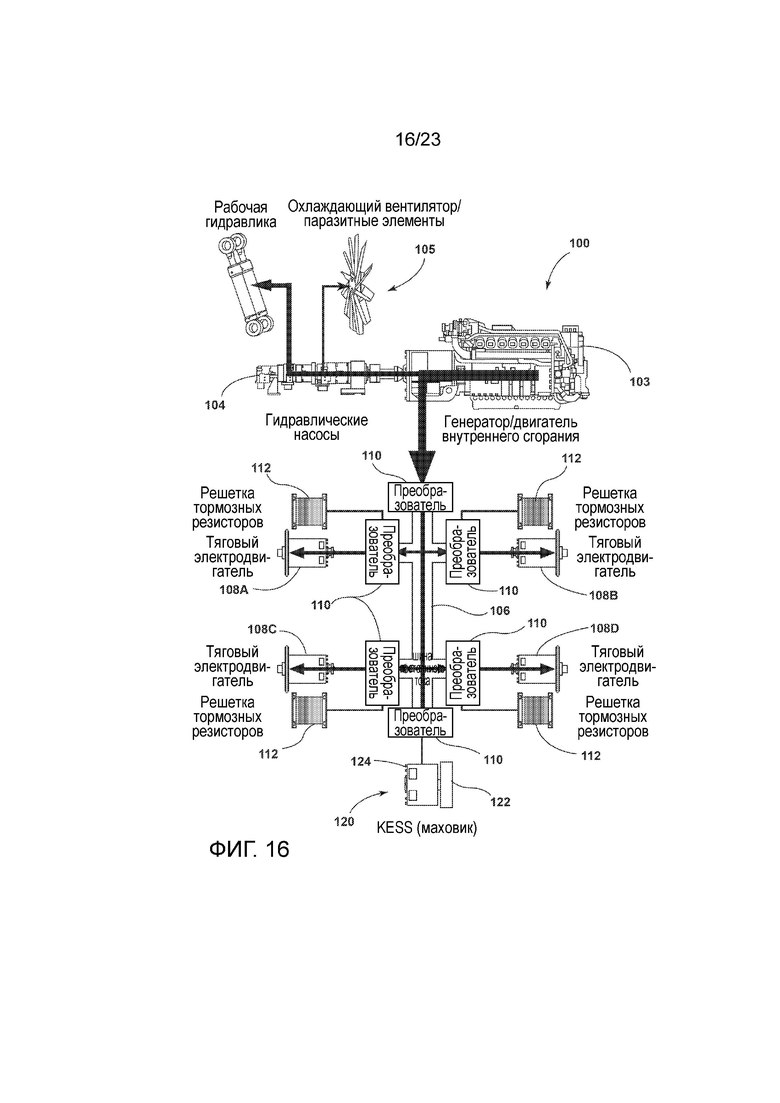
[0031] ФИГ. 16 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для выполнения тягового усилия, без использования системы накопления кинетической энергии.
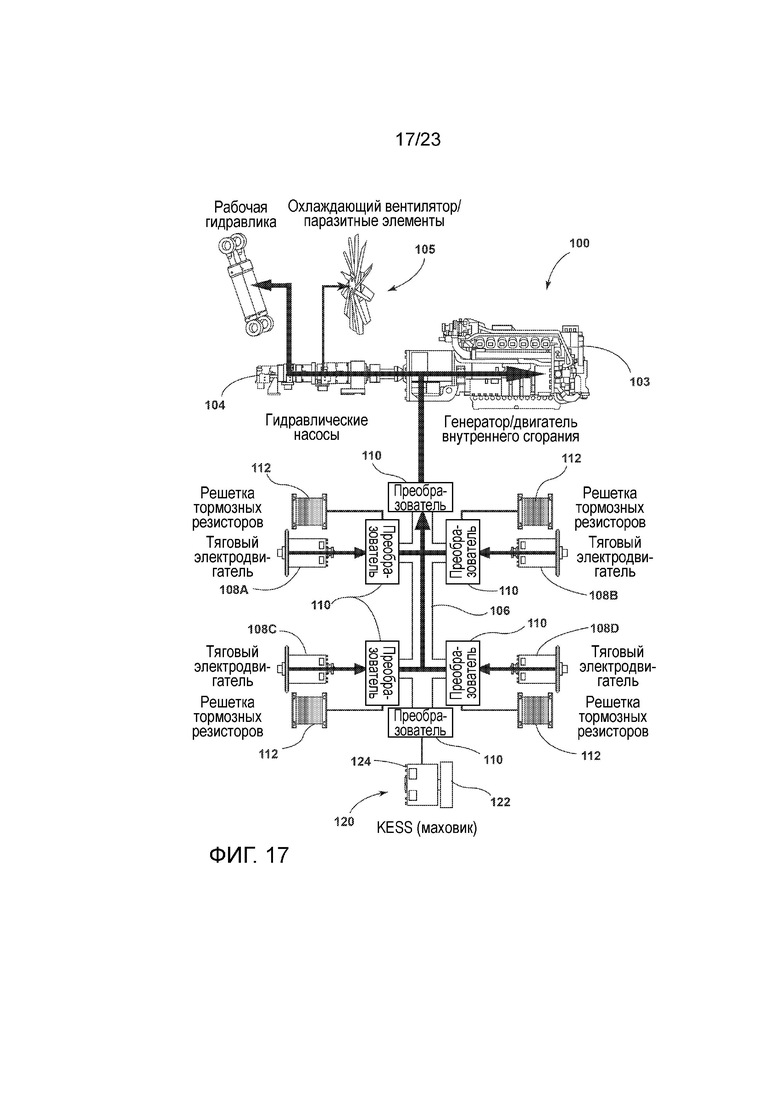
[0032] ФИГ. 17 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для выполнения легкого торможения.
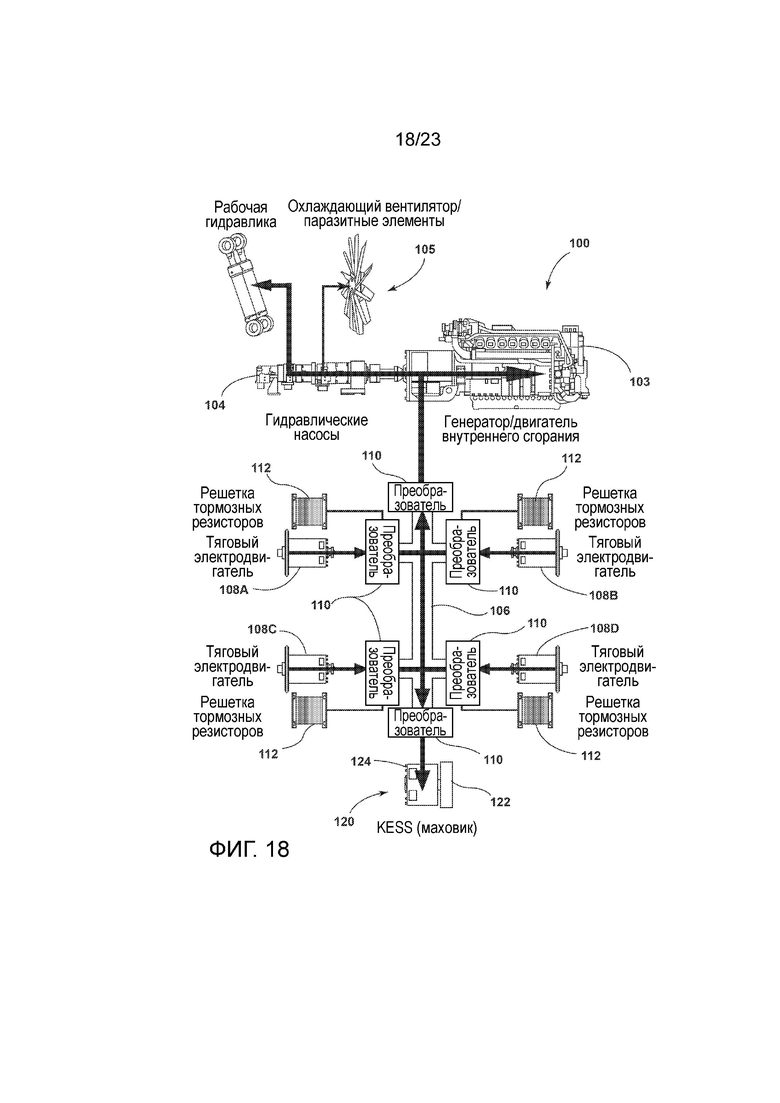
[0033] ФИГ. 18 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для выполнения жесткого торможения и зарядки системы накопления кинетической энергии.
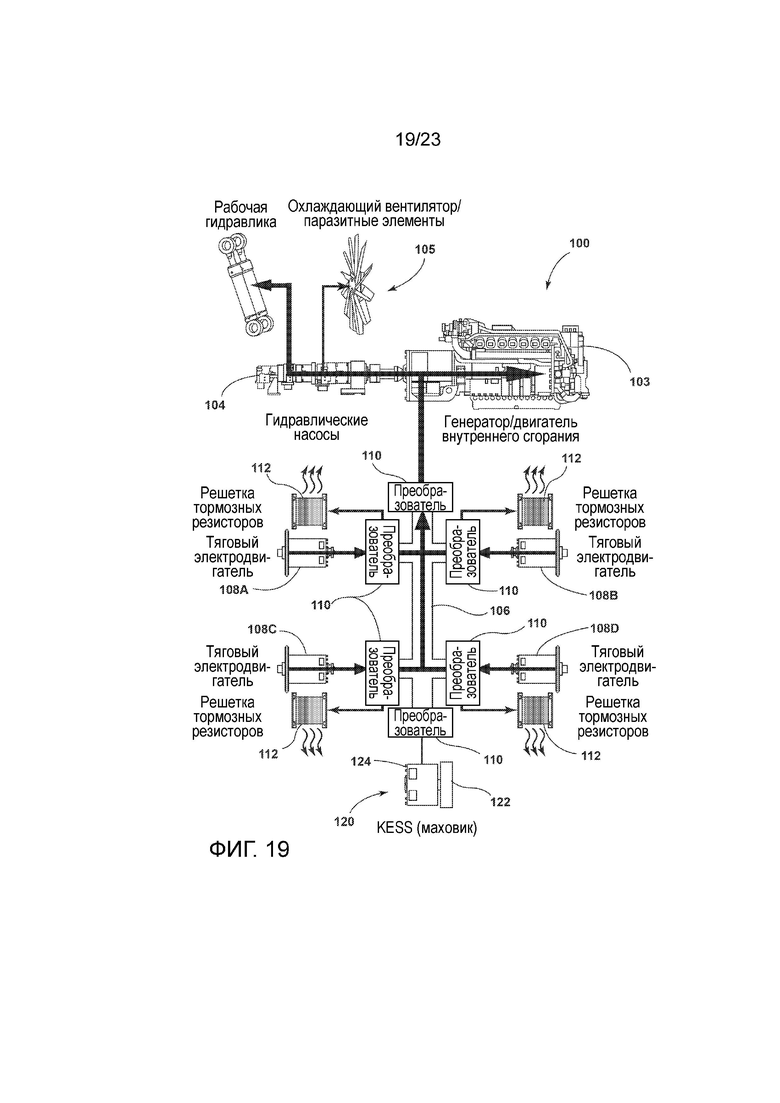
[0034] ФИГ. 19 схематически иллюстрирует поток мощности в оборудовании по ФИГ. 10 для выполнения жесткого прерывания, без зарядки системы накопления кинетической энергии.
[0035] ФИГ. 20 схематически иллюстрирует горную машину, включающую в себя несколько систем накопления кинетической энергии.
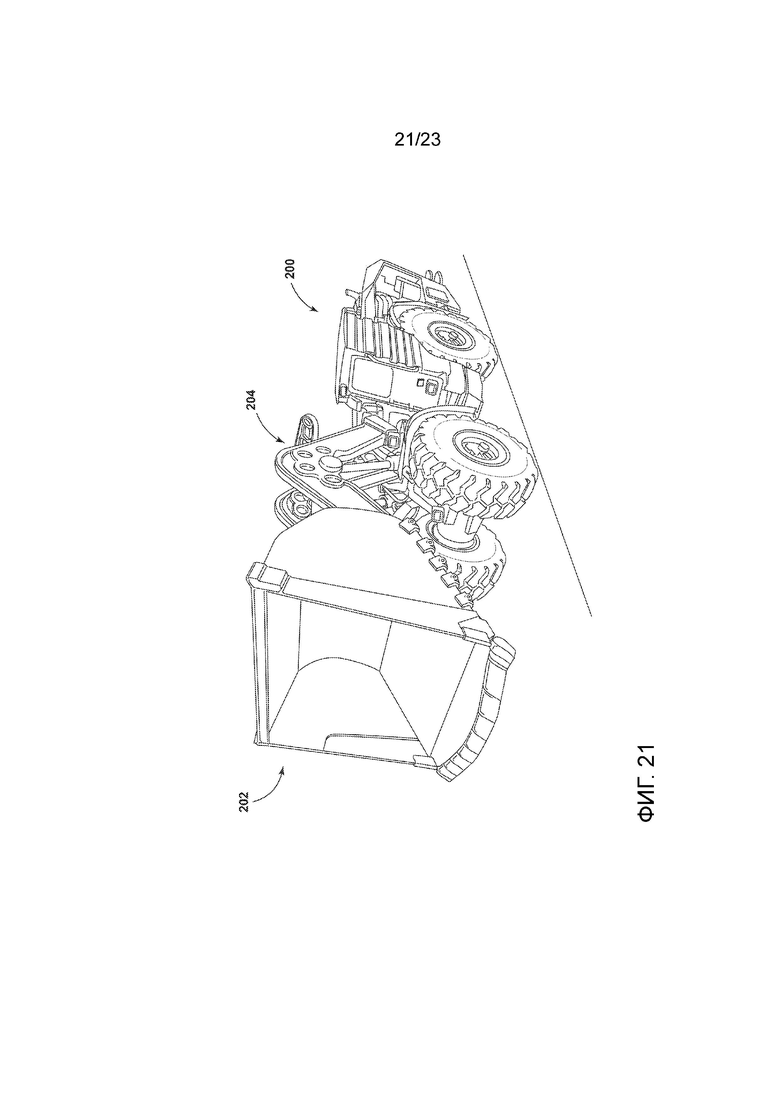
[0036] ФИГ. 21 иллюстрирует погрузочно-доставочную машину (load haul dump, «LHD») с ковшом, расположенным в положении разгрузки.
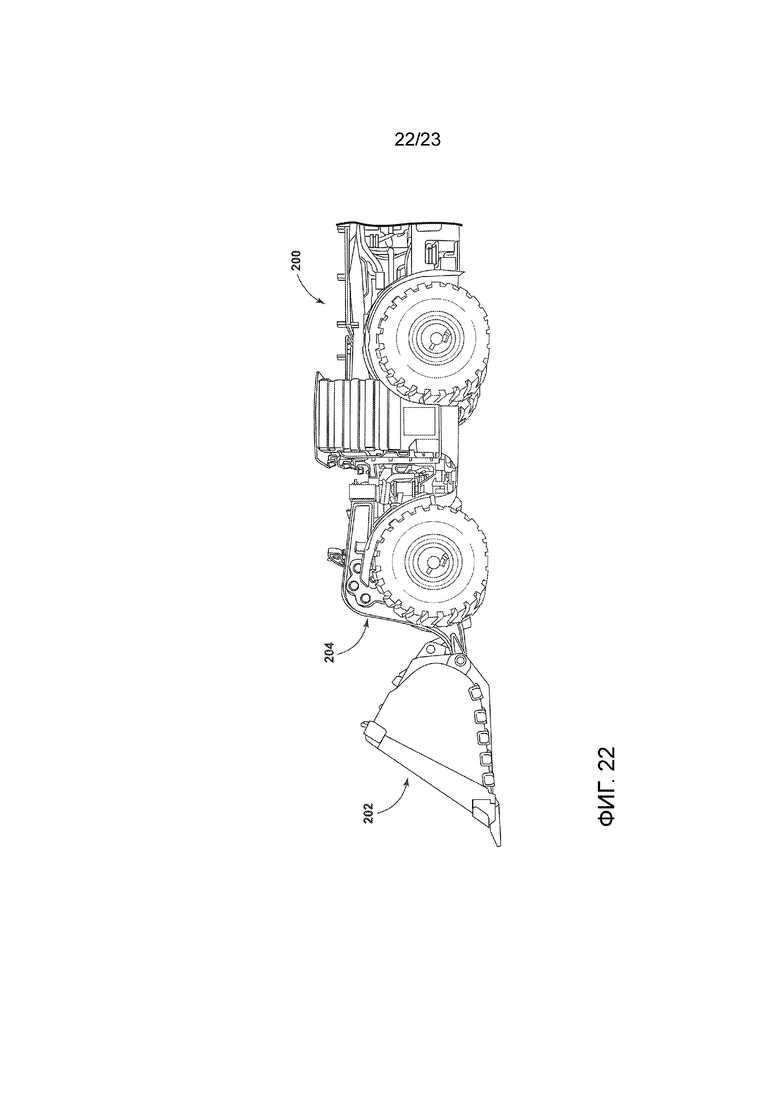
[0037] ФИГ. 22 иллюстрирует LHD по ФИГ. 20 с ковшом, расположенным в положении копания.
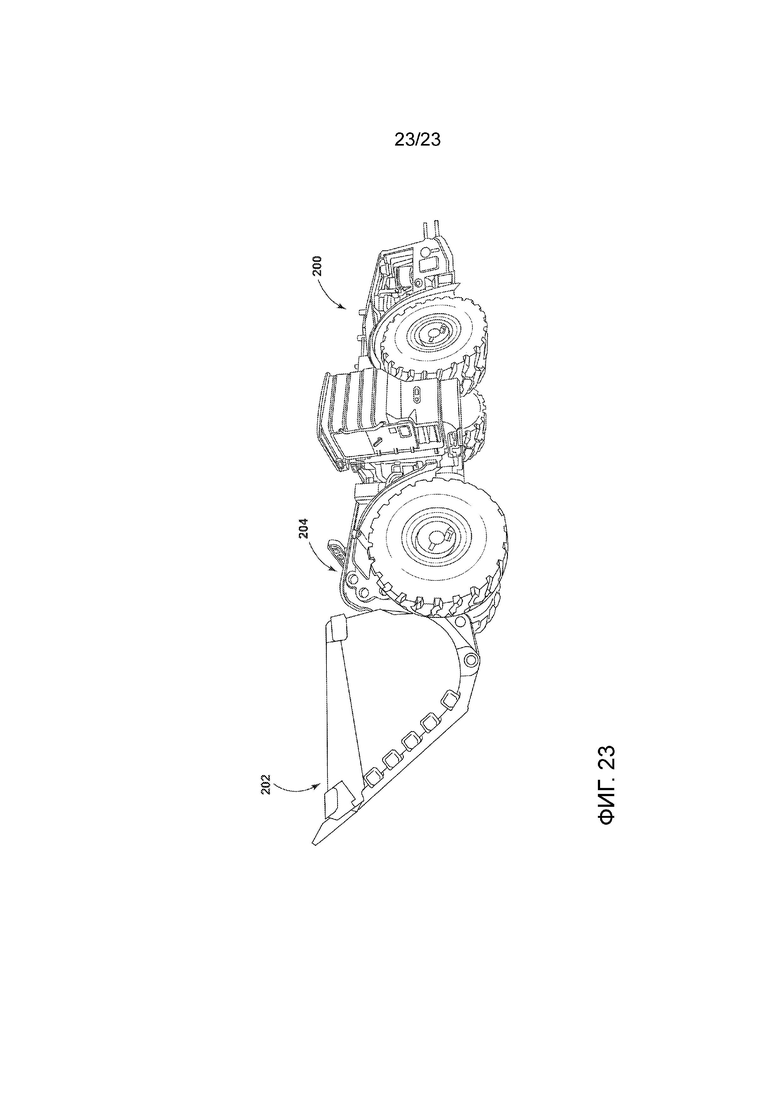
[0038] ФИГ. 23 иллюстрирует LHD по ФИГ. 20 с ковшом, расположенным в положении переноски.
ПОДРОБНОЕ ОПИСАНИЕ
[0039] Ранее, все варианты воплощения изобретения были разъяснены подробно, при этом следует понимать, что изобретение не ограничено в своем применении деталями конструкции и расположением компонентов, изложенных в следующем описании, или проиллюстрированных на прилагаемых чертежах. Изобретение пригодно для других вариантов воплощения и для реализации или осуществления различными способами. Также, следует понимать, что фразеология и терминология, используемая в настоящей работе, приведена в целях описания, и ее не следует рассматривать как ограничивающую. Использование термина «включающий в себя», «содержащий» или «имеющий» и их разновидностей в настоящей работе следует понимать как охватывающие объекты, перечисленные ниже и их эквиваленты, а также дополнительные объекты. Пока не будет указано или ограничено иное, термины «прикрепленный», «соединенный», «опирающийся» и «связанный» и их разновидности используются широко и охватывают как непосредственные, так и опосредованные крепления, соединения, опоры и связи.
[0040] В дополнение, следует понимать, что варианты воплощения изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные компоненты или модули, которые в целях обсуждения могут быть проиллюстрированы и обсуждены, как если бы большая часть компонентов была воплощена лишь в аппаратном обеспечении. Однако, любой обычный специалист в данной области техники, и исходя из прочтения данного подробного описания, может понять, что, по меньшей мере, в одном варианте воплощения аспекты изобретения могут быть воплощены в программном обеспечении (например, сохранены на не промежуточном носителе, считываемом компьютером), исполняемом одним или более блоками обработки данных, такими как микропроцессор, интегральные микросхемы прикладной ориентации (application specific integrated circuit, «ASICs»), или другое электронное устройство. По существу следует отметить, что для воплощения изобретения может быть использовано несколько устройств на основе аппаратного и программного обеспечения, а также несколько различных структурных компонентов. Например, термин «контроллеры», описанные в спецификации, могут включать в себя один или более электронных процессоров или блок обработки данных, один или более модулей носителей, считываемых компьютером, один или более интерфейсов ввода/вывода и различных соединений (например, системной шины), соединяющих компоненты.
[0041] Как было отмечено выше, варианты воплощения изобретения включают в себя одну или более систем накопления кинетической энергии («KESS») в приводном механизме продвижения машины (например, высокомощной), которые могут быть использованы на горных машинах (например, на наземных и подземных горных машинах), включающие в себя SR-технологию. Следовательно, в вариантах воплощения изобретения могут быть использованы KESS с системой электропривода. Системы электропривода могут сжигать н а 30-40% меньше топлива, чем эквивалентный механический привод. Эта экономия топлива может быть достигнута за счет различий в соответствующих приводных цепях оборудования и относительных КПД. В частности, в механическом приводе системы, используемом в настоящее время в наземных горных применениях, задействована стандартная механическая цепь привода, с преобразователем вращающего момента, полуавтоматической или автоматической коробкой передач/коробкой редуктора и дифференциалами. Однако, системы механического привода может быть неэффективным из-за работы преобразователя вращающего момента и может потребовать наличия большого двигателя внутреннего сгорания для подачи высокой выходной мощности, даже через двигатель внутреннего сгорания, который может не надлежащим образом работать на уровне максимальной выходной мощности. Например, ФИГ. 1 иллюстрирует кривую мощности для системы механического привода.
[0042] Системы электропривода с переключаемым магнитным сопротивлением обеспечивают другие преимущества в КПД перед системами передачи с механическим приводом. Например, система привода с переключаемым магнитным сопротивлением может позволить уменьшить размеры двигателя внутреннего сгорания, благодаря способности системы к поддержанию скорость двигателя внутреннего сгорания при максимальном уровне выходной мощности. Например, ФИГ. 2 иллюстрирует кривую мощности для системы привода с переключаемым магнитным сопротивлением. Кроме того, ФИГ. 3 схематически иллюстрирует наземный погрузчик с дизель-гибридным SR-приводом. Как было описано выше, наземные погрузчики работают или выполняют почти циклические режимы работы. Например, цикл работы наземного погрузчик может включать в себя приблизительно четыре изменения направления машины в ходе одного цикла, который может длиться приблизительно 40 секунд.
[0043] В частности, как проиллюстрировано на ФИГ. 3, наземный погрузчик включает в себя двигатель 10 внутреннего сгорания, скомбинированный с электродвигателем/генератором 12 (например, SR-электродвигателем/генератором) и системой 13 тяги. Система 13 тяги, проиллюстрированная на ФИГ. 1 включает в себя четыре SR-электродвигателя 14. Каждый SR-электродвигатель 14 может подавать электроэнергию к одному колесу погрузчика. SR-электродвигатели 14 и электродвигатель/генератор 12 соединены электрической шиной 16 (например, шиной постоянного тока (direct current («DC») bus)). Один или более преобразователей 18 подключают электродвигатель/генератор 12 к электрической шине 16. Аналогично, один или более преобразователей 18 подключают SR-электродвигатели 14 к электрической шине 16. Преобразователи 18 могут преобразовывать энергию, подаваемую электродвигателем/генератором 12, в мощность, подаваемую по электрической шине 16. Аналогично, преобразователи 18 могут преобразовывать энергию, подаваемую по электрической шине 16, в энергию, используемую SR-электродвигателями 14.
[0044] В системе, проиллюстрированной на ФИГ. 3, число оборотов в минуту («RPM») двигателя 10 внутреннего сгорания не зависит от скорости тягового электродвигателя, обеспечиваемой за счет SR-электродвигателей 14. Иными словами, каждый SR-электродвигатель 14 может забирать или подавать энергию вращения на линию возбуждения двигателя внутреннего сгорания при любой скорости с небольшими издержками с точки зрения потерь в КПД. В некоторых вариантах воплощения, скорость двигателя 10 внутреннего сгорания может быть задана для его приведения в действие при самом низком значении RPM, при котором доступна максимальная мощность в лошадиных силах двигателя внутреннего сгорания.
[0045] Задание скорости двигателя 10 внутреннего сгорания (при максимуме кривой мощности) облегчает возможность повышения скорости двигателя 10 внутреннего сгорания выше скорости, заданной регулятором оборотов (выше скорости двигатель внутреннего сгорания), что заставляет топливные форсунки прекращать подавать топливо на двигатель 10 внутреннего сгорания и позволяет использовать линию возбуждения в качестве маховика для накопления энергии торможения. Системы механического привода неэффективны с точки зрения пропускания энергии от ведущего вала двигателя к колесам, в частности, когда существует высокий перепад в скорости (например, из-за работы преобразователя вращающего момента в условиях высокого перепада скоростей). Двигатель внутреннего сгорания в механическом приводе машины будет, как правило, находиться под высокой нагрузкой при скоростях ниже максимума кривой мощности в лошадиных силах; при условии, что топливо сжигают при КПД, меньшем, чем максимальный КПД двигателя внутреннего сгорания. Поскольку для систем механического привода обычно требуется высокая мощность при неоптимальном числе оборотов в минуту двигателя внутреннего сгорания, двигатели внутреннего сгорания могут иметь слишком большие размеры в относительных единицах, когда номинальная мощность двигателя внутреннего сгорания аналогична, но объемная вместимость двигателя внутреннего сгорания требуется большая. Большие двигатели внутреннего сгорания приводят к конструкции машины, которая имеет более высокие эксплуатационные затраты и стоимость переоборудования, в дополнение к большим потерям на трение.
[0046] ФИГ. 4 иллюстрирует кривую КПД SR-машины. SR-система может придавать полный вращающий момент колесам в ходе разработки, при потреблении лишь приблизительно 10% мощности двигателя внутреннего сгорания в лошадиных силах. Это может происходить вследствие низких реактивных потерь SR-системы. Например, лишь значительные потери могут представлять собой потери в меди трансформатора, обусловленные внутренним сопротивлением катушек электродвигателя и током, проходящим через них. Следовательно, SR-машина (двигатель или генератор) может иметь почти плоскую кривую КПД относительно ее диапазона скоростей, как проиллюстрировано на ФИГ. 4 выше.
[0047] Цепь механического привода во время разработки обычно работает при сравнительно полной выходной мощности в лошадиных силах. Для преобразователя вращающего момента требуется, чтобы эта мощность генерировала вращающий момент. Большая часть этой мощности в лошадиных силах теряется в виде тепла, которое является побочным продуктом процесса генерирования вращающего момента. Кроме того, преобразователь вращающего момента неэффективен всякий раз, когда между ведущим и ведомым валом имеется значительная пробуксовка или разность скоростей.
[0048] Во время разработки является эффективным, чтобы обе системы находились при нуле процентов КПД, поскольку выходная мощность покоящейся оси равна нулю. При этом условии, КПД передачи можно измерить как функцию выходного вращающего момента относительно потребления мощности. Однако, при этом сценарии, система SR-привода является более эффективной при генерировании вращающего момента на единицу потребляемой мощности, по сравнению с типичным механического привода на ведущие колеса.
[0049] Также, на машине с механическим приводом, используются стандартные тормоза. Эти тормоза обычно представляют собой пакетные дисковые тормоза мокрого типа. Подобно всем механическим тормозам, эти устройства преобразовывают кинетическую энергию в тепло. Тепло на многодисковый тормоз преобразуется в масло для гидравлических систем и рассеивается за счет системы радиаторного охлаждения.
[0050] В машинах SR-привода, таких как наземный погрузчик, энергия торможения отводится назад на линию возбуждения двигателя внутреннего сгорания. В некоторых вариантах воплощения, эту энергию торможения используют, как будет описано ниже. В частности, энергия торможения может сначала способствовать потерям в паразитных элементах вокруг машины. Они включают в себя, но не ограничены вентилятором двигателя внутреннего сгорания и другими охлаждающими вентиляторами, установка кондиционирования воздуха и генератор переменного тока для зарядки батареи. Эти системы обладают низкой мощностью, по сравнению с энергией торможения, которая отводится таким образом, что мы имеем дело с тем, что значительная энергия остается.
[0051] Затем, вместе с энергией могут подаваться нагрузки на рабочую гидравлику системы. Это включает в себя функции подъемника, ковша и управления гидравлики. Любая остальная энергия может быть использована для внесения вклада в энергию цепи привода. Например, SR-генератор, теперь действующий как электродвигатель, вносит вклад в силу тяги цепи привода в точке, где двигатель регулятор оборотов двигателя внутреннего сгорания может снизить или прекратить подачу топлива к форсункам. В этой точке двигатель внутреннего сгорания может не потреблять никакого топлива и потери на трение и на вихреобразование двигателя внутреннего сгорания компенсируются SR-генератором. В этих вариантах воплощения, скорость двигателя внутреннего сгорания может быть повышена до механического предела двигателя внутреннего сгорания, при котором указанный двигатель внутреннего сгорания превращается в устройство для накопления энергии (маховик), хотя и с плохим КПД, из-за трения и вихреобразования в двигателе внутреннего сгорания. Верхний предел скорости двигателя внутреннего сгорания (например, приблизительно 300 оборотов в минуту) выше пороговой точки регуляторов оборотов может быть использован на следующей стадии тягового усилия для повышения имеющейся мощности для системы тяги, выше номинальной мощности двигателя внутреннего сгорания. При использовании трансмиссии в качестве устройства для накопления энергии, как было описано выше, обеспечивает опцию накопления энергии, когда скорость цикла машины велика (например, менее приблизительно 50 секунд), а способность к накоплению энергии низка, поскольку энергия, накопленная на трансмиссии, может быть повторно использована системой тяги перед ее расходованием за счет потерь на трение и вихреобразование двигателя внутреннего сгорания. Следовательно, эта опция накопления энергии может быть использована на наземных погрузчиках на большой высоте, где доступно меньше общего количества кислорода для горения в двигателе внутреннего сгорания. Например, на большой высоте, для подачи воздуха к двигателю внутреннего сгорания часто требуется больший диаметр для питающих турбин. Эти питающие турбины требуют длительного времени, необходимого для набирания оборотов для достижения рабочей скорости, из-за большей инерционной массы. Это время ограничивает эффекты, отвечающие за время двигателя внутреннего сгорания. Поэтому, KESS может снабжать систему тяги необходимой мощностью, когда питающие турбины набирают рабочую скорость.
[0052] Однако, для подземной горной работы, в качестве альтернативы или в сочетании с накоплением энергии на линии возбуждения двигателя внутреннего сгорания, KESS может быть использована для накопления энергии торможения. KESS обеспечивает выигрыш в КПД топлива, а следовательно, снижает выбросы. В частности, KESS обеспечивает решение, связанное с большей продолжительностью, более высокой выработкой и высоким КПД накопления, чем решение, связанное с накоплением на трансмиссии, используемое на наземных погрузчиках, как было описано в предыдущем абзаце. Например, ФИГ. 5 иллюстрирует кривую мощности для системы привода с переключаемым магнитным сопротивлением, включающей в себя KESS. Как проиллюстрировано на ФИГ. 5, KESS может обеспечивать наращивание мощности для повышения производительности двигателя внутреннего сгорания, что может позволить уменьшить размеры двигателя внутреннего сгорания, или его комбинированного устройства. Например, ФИГ. 6 иллюстрирует кривую мощности для системы привода с переключаемым магнитным сопротивлением, включающей в себя KESS большую, чем KESS, представленная на ФИГ. 5. Как проиллюстрировано на ФИГ. 6, большая KESS может обеспечивать максимальное усреднение мощности двигателя внутреннего сгорания, при обеспечении высокой максимальной мощности для системы тяги. Кроме того, ФИГ. 7 иллюстрирует кривую мощности для системы привода с переключаемым магнитным сопротивлением, включающей в себя KESS и батарею (например, натриевую батарею), топливный элемент, или то и другое. Как проиллюстрировано на ФИГ. 7, при наличии источника питания средней мощности, могут быть использованы альтернативные технологии подачи энергии, такие как технологии топливных элементов и батарейные технологии.
[0053] Эксплуатационные профили подземной горной машины значительно отличаются от эксплуатационных профилей наземной горной машины, такой как погрузчик, одноковшовый экскаватор, и т.п. Например, наземный эксплуатационный профиль, как правило, короткий, и при этом машина сталкивается четырьмя изменениями направления в течение 40-секундного периода цикла и затрачивает приблизительно 8-10 секунд на заполнение ковша в ходе выработки. Напротив, в подземной среде имеются два основных режима работы: (1) работа по разработке шахты и (2) работа по извлечению из шахты. Оба режима работы отличаются от поверхностной работы с точки зрения расстояния откатки и результирующего времени цикла. Например, подземная машина может откатывать материалы на расстояния до 200 метров при разработке шахты и на расстояния более 350 метров при извлечении из шахты, и эти расстояния приводят к периодам времени цикла, которые различаются приблизительно на 2-3 минуты.
[0054] Также, при подземных горных работах, рабочая среда преимущественно плоская. Например, максимальные подъемы, наблюдаемые при этой работе, составляют примерно 1 к 50. Как было описано выше, подземные машины могут откатывать материал на расстояния, превышающие 350 метров. Также, на цикле извлечения из шахты, машины обычно будут совершать два пробега вперед и два пробега назад. В дополнение, во многих шахтах, погрузчик для загрузки добытого ископаемого может объезжать многие точки отбора, находящиеся на различных расстояниях от дробилки для сбора руды. Следовательно, природа этого цикла может зависеть от плана горных работ и расстояния от руды до погрузочного бункера дробильной установки.
[0055] Исходя из этого типа окружающей среды, во время события торможения возникает одна возможность для накопления энергии в цикле выработки. Для максимизации производительности, подземная машина должна быть пригодна для быстрого ускорения и замедления. Следовательно, в ходе замедления, энергия, получаемая от тяговых электродвигателей, может быть захвачена для дальнейшего повторного использования KESS. Дополнительно, когда двигатель внутреннего сгорания находится в состоянии низкого потребления, часть его полезной мощности может быть использована для подачи энергии на KESS. Как было отмечено выше, использование накопленной энергии указанным образом позволяет уменьшить размеры дизельного двигателя за счет усреднения выходной мощности двигателя внутреннего сгорания в течение цикла. В дополнение к уменьшению размера двигателя внутреннего сгорания, которое снижает затраты, в некоторых вариантах воплощения степень снижения размеров также может привести к использованию двигателя внутреннего сгорания с уменьшенной длиной блока, что обеспечивает дополнительный выигрыш в быстродействии, поскольку потери на трение и вихреобразование двигателя внутреннего сгорания дополнительно снижаются.
[0056] KESS, используемая в этих ситуациях, может быть пригодна для накопления энергии одного или двух событий торможения (например, приблизительно 1,2 мегаджоулей («МДж») на событие) с высокой допустимой мощностью (например, приблизительно 500 киловатт («кВт»)), позволяющей заполнять или опустошать KESS за несколько секунд. KESS также может быть сконфигурирована для обеспечения эффективного поглощения и высвобождения энергии и удержания сохраненной энергии с минимальными потерями с течением времени.
[0057] С точки зрения окружающей среды разработки шахты, большая доля работ по разработке шахты происходит вокруг въезда или уклона шахты. Эти уклоны обычно находятся под наклоном приблизительно 1 к 6,5. При работе в среде разработки, подземная машина раскапывает дно уклона, где дорогу продлевают с помощью бурильных и дробеструйных технологий. Машину затем откатывают вверх по уклону приблизительно на 25-200 метров, где машина отгружает или загружает материал в грузовик. Подземная машина затем возвращается к раскапыванию забоя, что влечет за собой погружение приблизительно на 200 метров уклона, при торможении, для управления скоростью.
[0058] При откатке вверх по склону мощность двигателя внутреннего сгорания интенсивная и влияет на ресурс коробки передач, тогда как возвращение вниз по склону обычно налагает большую нагрузку на тормоза. KESS, которая накапливает энергию торможения, генерируемую при езде вниз под уклон для раскапывания забоя (например, давая более 10 МДЖ), может обеспечивать значительное повышение мощности двигателя внутреннего сгорания при подъеме вверх по наклону.
[0059] ФИГ. 8 иллюстрирует систему SR-привода с KESS 30. KESS 30 включает в себя электродвигатель 30a с SR-приводом и маховик 30b. В конфигурации, проиллюстрированной на ФИГ. 8, KESS 30 может быть сконфигурирована для накопления энергии торможения при замедлении хода машины (скорость приводного механизма понижается) по команде оператора. Энергия может удерживаться в KESS 30 в течение нескольких минут. Когда дает команду машине на ускорение, KESS 30 высвобождает энергию в систему тяги, пополняя энергию, подаваемую из двигателя внутреннего сгорания (например, дизельного двигателя) за счет электродвигателя/генератора. В некоторых вариантах воплощения, это высвобождение энергии из KESS 30 позволяет машине иметь максимальную номинальную мощность в лошадиных силах, приблизительно в два раза превышающую выходную мощность одного двигателя внутреннего сгорания.
[0060] В ходе рабочего цикла могут иметь место периоды, когда двигатель внутреннего сгорания не работает при полной нагрузке. Во время этих периодов мощность двигателя внутреннего сгорания может быть использована для «дозаправки» KESS 30. Эта функциональность может обеспечить, чтобы KESS 30 была загружена или заполнена перед событием ускорения.
[0061] В некоторых вариантах воплощения, скорость KESS 30 может быть легко привязана к скорости машины. Например, при возрастании скоростей машины (скорость приводного механизма повышается), KESS 30 может замедлиться (скорость вращения маховика 122 может снизиться), в зависимости от высвобождения энергии из KESS 30. Наоборот, когда машина замедляется (скорость приводного механизма понижается), KESS 30 может быть загружена и будет соответственно повышать скорость (скорость вращения маховика 122 повышается). Одним преимуществом этой работы KESS 30 является то, что гироскопические силы KESS 30 будут минимальными, когда машина работает при высокой скорости и быстром движении, или контакт со стенкой может привести к значительному износу или перегрузке корпуса. В некоторых вариантах воплощения, искомая скорость машины может быть получена в результате контроля оператора.
[0062] Например, в некоторых вариантах воплощения, скорость вращения KESS 30 (скорость вращения маховика 30b), а следовательно, и энергию, накопленную в KESS 30, регулируют в зависимости от скорости машины. Например, ФИГ. 9 иллюстрирует кривую контроля сопоставления скорости машины со скоростью вращения KESS 30. Линия 90 обозначает целевую скорость KESS 30 для заданной скорости машины, и область 92, окружающая линию 90, обозначает допустимый диапазон изменения вокруг целевой скорости. Соотношение, проиллюстрированное на ФИГ. 9, может быть использовано для обеспечения управления гироскопическими силами KESS 30, которые могут быть очень высокими, когда высокая угловая скорость машины (скорость изменения направления) совпадает с высокой скоростью вращения KESS 30. Форма кривой также учитывает энергию, требуемую для ускорения и замедления машины, и она может быть задана для конкретного оборудования и применения.
[0063] Как было описано более подробно ниже, в некоторых вариантах воплощения, когда скорость машины повышается (в ходе ускорения), энергию забирают из KESS 30 и подают на тяговые электродвигатели путем помещения энергии на двунаправленную шину (например, DC-шину), снабжая тяговые электродвигатели. Эта подача энергии снижает скорость вращения KESS 30. Когда система тяги требует большую мощность, чем поступает на KESS 30, дизельный двигатель может обеспечивать дополнительную энергию. Аналогично, когда KESS 30 подает больше энергии, чем требуется для тяговых электродвигателей, избыточная энергия может быть рассеяна на решетках тормозных резисторов.
[0064] Аналогично, когда скорость машины падает (в ходе замедления), KESS 30 управляют для повышения скорости, а энергию, требуемую для повышения скорости KESS 30, отбирают из двунаправленной шины. Эта энергия подается тяговыми электродвигателями, функционирующими в режиме торможения работы. В некоторых вариантах воплощения, когда KESS 30 не получает достаточной энергии от тяговых электродвигателей в ходе режима торможения работы, для удовлетворения требований по кривой скорости, энергия может быть принята от дизельного двигателя через генератор. Аналогично, когда KESS 30 принимает избыток энергии, энергия может быть возвращена в трансмиссию двигателя внутреннего сгорания через генератор, для преодоления любых потерях в трансмиссии и откачки топлива из двигателя внутреннего сгорания. Любая дополнительная избыточная энергия может быть рассеяна на решетках тормозных резисторов в виде тепла.
[0065] Следовательно, как было описано выше, KESS 30 может подавать или отбирать энергию из двунаправленной шины, как определяется кривой контроля, проиллюстрированной на ФИГ. 9. Двигатель внутреннего сгорания, через функциональность генератора, может подавать энергию, только когда существует разница между энергией, подаваемой KESS 30 и энергией, требуемой для тяговых электродвигателей. Разница между подаваемой и требуемой энергией зависит от рабочих условий, в которых находится машина. Например, подъем или уклон и сопротивление качению на штреке, на котором машина работает, может изменить баланс подачи и спроса между KESS 30 и тяговыми электродвигателями, когда тяговые электродвигатели работают, как в режиме тягового усилия, так и в режиме торможения, что изменяет количество потребляемой или подаваемой энергии. Следовательно, в простейших понятиях, KESS 30 может представлять собой первичный источник питания для двунаправленной шины, а двигатель внутреннего сгорания может представлять собой вторичный источник питания для двунаправленной шины, например, когда KESS 30 не может удовлетворять требованиям по энергопотреблению на двусторонней электрической шине.
[0066] Следовательно, в пространстве подземной горной работы, одно преимущество KESS 30 состоит в том, что максимальная мощность в лошадиных силах двигателя внутреннего сгорания машины, работающего в этой среде, может быть снижена. Это может быть важным фактором, поскольку мощность в лошадиных силах двигателя внутреннего сгорания может быть определяющим фактором в требованиях по вентиляции подземной шахты, что является значительным капиталовложением для заказчика. Например, во многих юрисдикциях номинальную мощность в лошадиных силах двигателя внутреннего сгорания используют в качестве основы для вентиляции свежим воздухом в стандартах соответствия.
[0067] Для наземных машин, KESS обеспечивает преимущества в ситуациях большой высоты, когда соответствующий двигатель внутреннего сгорания уменьшен, из-за более разреженного воздуха (для сжигания в двигателе внутреннего сгорания имеется меньше общего количества кислорода). Например, для преодоления проблемы разреженного воздуха, изготовители двигателя внутреннего сгорания обычно повышают диаметр питающих турбин. Этот повышенный диаметр усиливает инерцию питающих турбин, что приводит к более длительному турболагу (время ожидания для питающей турбины, требуемое для повышения скорости и наращивания мощности). KESS может быть использована для обеспечения дополнительного источника энергии для машины, при повышении выходной мощности в лошадиных силах двигателя внутреннего сгорания. Например, KESS может быть использована для плавной загрузки двигателя внутреннего сгорания, для обеспечения передаточной функции, а следовательно, улучшенной эксплуатационной характеристики, обеспечивающей дополнительный прирост мощности, получаемой из энергии торможения, которая в ином случае могла бы быть рассеяна в виде тепла, или для сочетания того и другого.
[0068] Следует понимать, что размер KESS (например, энергоемкость и максимально допустимая мощность) обоснован требованиями применения. Например, в некоторых применениях может быть использовано решение KESS в качестве решения, связанное с низкой энергоемкостью и высокой мощностью или другими сочетаниями энергоемкости и мощности, в зависимости от рабочих потребностей машины. Например, когда машина обеспечивает максимальную мощность в течение продолжительных периодов, машина может быть снабжена KESS, которая обеспечивает высокую способность к накоплению энергии и высокую максимально допустимую мощность.
[0069] Например, ФИГ. 10 иллюстрирует горное оборудование 100 согласно одному варианту воплощения изобретения. Горное оборудование 100 может представлять собой подземную горную машину (например, комбайн непрерывного действия, систему откатки, выемочный комбайн для сплошного забоя, погрузчик, и т.п.) или наземную горную машину (например, колесо погрузчик, гибридный одноковшовый экскаватор, драглайновый комбайн, и т.п.). Горное оборудование 100 может включать в себя шасси 101 и систему тяги 102, такую как несколько колес, вращательным образом связанных с шасси 105. Горное оборудование 100 также может включать в себя другие передвижные системы и компоненты, такие как кабельный барабан или систему поворота. В варианте воплощения, проиллюстрированном на ФИГ. 10, горное оборудование 100 представляет собой погрузочно-доставочную машину (load haul dump, «LHD»), как правило, используемую в областях подземных горных работ.
[0070] Как проиллюстрировано на ФИГ. 11, горное оборудование 100 включает в себя генератор/двигатель 103 внутреннего сгорания. Генератор/двигатель 103 внутреннего сгорания может включать в себя дизельный двигатель, который производит механическую энергию, и генератор, который преобразует выходную механическую энергию, производимую двигателем внутреннего сгорания, в электрическую энергию. В некоторых вариантах воплощения, генератор включает в себя SR-генератор. В некоторых вариантах воплощения, генератор может быть использован в качестве электродвигателя, который повышает скорость двигателя внутреннего сгорания (например, для использования двигателя внутреннего сгорания в качестве устройства для накопления энергии, используемого отдельно или в сочетании с системой накопления кинетической энергии, описанной ниже). Следует понимать, что в некоторых вариантах воплощения, горное оборудование 100 включает в себя один или более генераторов, снабжаемого энергией от одного или более двигателей внутреннего сгорания.
[0071] Генератор/двигатель 103 внутреннего сгорания обеспечивает механическую мощность (показанную пунктирными линиями на ФИГ. 11) для гидравлических насосов 104, которые могут управлять рабочими гидравликами и охлаждающими вентиляторами и паразитными элементами 107, с использованием гидравлической энергии (показанной пунктирными линиями на ФИГ. 11). В частности, энергия вращения проходит через генератор и подается на гидравлические насосы 104 через механическое соединение между гидравлическими насосами 104 и генератором/двигателем 103 внутреннего сгорания. Генератор/двигатель 103 внутреннего сгорания также подает электроэнергию (показанную сплошными линиями на ФИГ. 11) на двустороннюю электрическую шину 106 (например, на емкостную шину постоянного тока (direct current («DC»)). Двусторонняя электрическая шина 106 подает электроэнергию на один или более тяговых электродвигателей 108 (например, SR-электродвигателей). Например, как проиллюстрировано на ФИГ. 11, горное оборудование 100 включает в себя передний левый 108A тяговый электродвигатель, передний правый 108B тяговый электродвигатель, задний 108C левый тяговый электродвигатель и задний 108D правый тяговый электродвигатель. Каждый тяговый электродвигатель 108 приводит в движение колесо или другой приводной механизм, включенный в систему тяги 102. В частности, каждый тяговый электродвигатель 108 преобразует электроэнергию, полученную по двусторонней электрической шине 106, в энергию вращения для приведения в действие приводного механизма. В некоторых вариантах воплощения, один или более тяговых электродвигателей 108 включают в себя SR-электродвигатели.
[0072] В некоторых вариантах воплощения, двусторонняя электрическая шина 106 имеет связь с одним или более преобразователями 110. Преобразователи 110 могут быть сконфигурированы для передачи энергии по двусторонней электрической шине 106 или для приема мощности из двусторонней электрической шины 106 (например, для использования двусторонней электрической шины 106 в качестве двунаправленной шины). Каждый преобразователь 110 может быть использован в качестве преобразователя постоянного тока, инвертора, выпрямителя или другого типа преобразователя мощности. В качестве альтернативы или в дополнение, преобразователь 110 может быть использован в качестве контроллера электродвигателя для тягового электродвигателя 108. Например, преобразователь 110 может быть сконфигурирован для обнаружения характеристик тягового электродвигателя 108 и отклика на обнаруженные характеристики. В некоторых вариантах воплощения, в одном или более преобразователей 110 используют устройства электрического переключения биполярного транзистора с изолированным затвором (insulated-gate bipolar transistor, «IGBT»). В некоторых вариантах воплощения, несколько (например, параллельных) преобразователей могут быть использованы для компонента, связанного с двусторонней электрической шиной 106. Например, KESS 120 может быть связана с одним или более параллельных преобразователей, которые направляют энергию в KESS 120 или из KESS 120. Также, в некоторых вариантах воплощения, KESS 120 может быть связана с одним или более параллельных преобразователей, направляющих энергию в KESS 120, и параллельных преобразователей, направляющих энергию из KESS 120. Использование нескольких из параллельных преобразователей может повлиять на быстродействие KESS 120 (например, на ускоренную зарядку, ускоренную разрядку, повышенный зарядный потенциал, повышенный разрядный потенциал или на их сочетание).
[0073] Как проиллюстрировано на ФИГ. 11, каждый тяговый электродвигатель 108 связан с решеткой 112 тормозных резисторов. Решетка 112 тормозных резисторов преобразует кинетическую энергию тягового электродвигателя в тепловую энергию (тепло) в ходе торможения горного оборудования 100.
[0074] Горное оборудование 100 также включает в себя систему накопления кинетической энергии (kinetic energy storage system, «KESS») 120. KESS 120 может включать в себя маховик 122 и электродвигатель/генератор 124. В некоторых вариантах воплощения, электродвигатель/генератор 124 включает в себя электродвигатель с переменной скоростью, такой как SR-электродвигатель/генератор с переменной скоростью. Например, акт аккумулирования и восстановления энергии из KESS связан с ускорением и замедлением вращающейся массы. Следовательно, широкий диапазон постоянной скорости и мощности SR-электродвигателя хорошо подходит для KESS. Маховик 122 механически связан с электродвигателем/генератором 124. Электродвигатель/генератор 124 сконфигурирован для приема электрической энергии из двусторонней электрической шины 106 и выведения энергии вращения на маховик 122, а в качестве альтернативы, - для приема энергии вращения от маховика 122 и выведения электрической энергии на двустороннюю электрическую шину 106. Следовательно, при приеме электрической энергии, электродвигатель/генератор 124 вращает маховик 122, для накопления кинетической энергии. Накопленная энергия может быть извлечена из KESS 120, с использованием энергии вращения от маховика 122 для вращения ротора, включенного в электродвигатель/генератор 124, который преобразует энергию вращения в электрическую энергию, которую можно подавать на двустороннюю электрическую шину 106. В некоторых вариантах воплощения, маховик 122, включенный в KESS 120, обладает скоростью вращения приблизительно 0-6500 RPM, что позволяет KESS 120 подавать выходную энергию приблизительно до 4000 лошадиных сил («hp») в секунду (приблизительно 3 МДж). В других вариантах воплощения маховик 112 обладает скоростью вращения приблизительно 3000-10000 RPM или приблизительно 5000-8000 RPM. Аналогично, в некоторых вариантах воплощения, KESS 120 обеспечивает выходную энергию приблизительно 1-15 МДЖ или приблизительно при 2-7 МДЖ. Как было отмечено выше, выходная энергия KESS 120 может зависеть от конфигурации одного или более преобразователей, связывающих KESS 120 с двусторонней электрической шиной 106.
[0075] Хотя это не проиллюстрировано на ФИГ. 11, горное оборудование 100 также включает в себя один или более контроллеров, которые управляют работой генератора/двигателя 103 внутреннего сгорания и KESS 120. В частности, горное оборудование 100 может включать в себя контроллер, который выпускает команды для KESS 120, включающие в себя команды, относящиеся к вращающему моменту на электродвигателе/генераторе 124 для накопления энергии, или к извлечению энергии из KESS 120. Аналогично, оборудование может включать в себя контроллер, который выпускает команды для генератора/двигателя 103 внутреннего сгорания, относящиеся к уровням выходной мощности двигателя внутреннего сгорания, генератора, или их обоих. Кроме того, горное оборудование 100 может включать в себя контроллер, который выпускает команды для тяговых электродвигателей 108, приводящих в действие систему тяги 102. Следует понимать, что эта функциональность может быть выполнена одним контроллером или несколькими контроллерами. Также, в некоторых вариантах воплощения, функциональность или ее часть может быть выполнена одним или более контроллеров, расположенных удаленно от горного оборудования 100, например, на удаленном пункте управления для горного оборудования 100. В некоторых вариантах воплощения, функциональность, выполненная контроллером, описанным в настоящей работе, может быть включена в другой компонент. Например, контроллер может быть включен в KESS 120 (например, в общий корпус).
[0076] В некоторых вариантах воплощения, как было описано выше применительно к ФИГ. 9, горное оборудование 100 может включать в себя контроллер, который выпускает команды для KESS 120 и генератор/двигатель 103 внутреннего сгорания, для подачи или извлечения энергии, исходя из скорости горного оборудования 100. В частности, как было описано более подробно ниже, контроллер может выпускать команды для KESS 120 и генератора/двигателя 103 внутреннего сгорания на использование KESS 120 в качестве первичного источника электропитания для двусторонней электрической шины 106.
[0077] ФИГ. 12 иллюстрирует один пример контроллера 150, включенного в горном оборудовании 100. Как проиллюстрировано на ФИГ. 12, контроллер 150 включает в себя электронный процессор 152 (например, один или более микропроцессоров, интегральных микросхем прикладной ориентации (application specific integrated circuit, «ASIC») или других электронные устройств), считываемую компьютером не промежуточную память 154 и интерфейс ввода/вывода 156. Следует понимать, что контроллер 150 может включать в себя компоненты, отличные от тех, которые проиллюстрированы на ФИГ. 12, и конфигурация компонентов, проиллюстрированных на ФИГ. 12, обеспечена лишь в качестве одного примера. Память 154 сохраняет управляющие сигналы, исполняемые электронным процессором 152, для выпуска команд, как было отмечено выше (например, через интерфейс ввода/вывода 156). Например, контроллер 150 может выпускать команды для управления потоками мощности, описанными ниже применительно к ФИГ. 13-19. Контроллер 150 также может использовать интерфейс ввода/вывода 158 для приема информации (например, о рабочих параметрах, таких как скорость машины, направление поворота, напряжение на шине, показания датчиков скорости двигателя внутреннего сгорания, нагрузка двигателя внутреннего сгорания, нагрузка системы тяги или командные функции, нагрузка гидравлической системы или командные функции, и т.п.), которые контроллер 150 может использовать для определения того, когда и какого типа команды выпускать. Например, в некоторых вариантах воплощения, контроллер 150 управляет KESS 120, исходя из одного или более сигналов, измеренных, полученных или рассчитанных для горного оборудования 100. Следует понимать, что интерфейс ввода/вывода 156 может поддерживать связь с компонентами, внешними по отношению к контроллеру 150 (например, KESS 120, генератором/двигателем 103 внутреннего сгорания, контроллером двигателя внутреннего сгорания, и т.п.) по проводной или беспроводной связи, включающей в себя локальные сети и сеть контроллеров.
[0078] ФИГ. 13 иллюстрирует возможные потоки мощности в горном оборудовании 100. В частности, как проиллюстрировано на ФИГ. 13, гидравлические насосы 104 потребляют энергию, подаваемую генератором/двигателем 103 внутреннего сгорания. Однако, генератор/двигатель 103 внутреннего сгорания также может принимать энергию из двусторонней электрической шины 106 (например, в ходе событий торможения). Кроме того, каждый тяговый электродвигатель 108 может принимать энергию из двусторонней электрической шины 106 и подавать энергию на двустороннюю электрическую шину 106. Аналогично, KESS 120 может принимать энергию из двусторонней электрической шины 106 и подавать энергию на двустороннюю электрическую шину 106. Напротив, решетки 112 тормозных резисторов только потребляют энергия из двусторонней электрической шины 106.
[0079] ФИГ. 14 иллюстрирует поток мощности в горном оборудовании 100 для зарядки KESS 120. В частности, как проиллюстрировано на ФИГ. 14, мощность, подаваемая генератором/двигателем 103 внутреннего сгорания, подается на двустороннюю электрическую шину 106, которая подает мощность для зарядки KESS 120. В некоторых вариантах воплощения, KESS 120 заряжают в ходе запуска горного оборудования 100. Однако, в других вариантах воплощения, KESS 120 можно заряжать в течение времени низкой нагрузки на генераторе/двигателе 103 внутреннего сгорания.
[0080] ФИГ. 15 иллюстрирует поток мощности в горном оборудовании 100 для выполнения тягового усилия, с использованием KESS 120. В частности, после зарядки KESS 120, KESS 120 может подавать мощность на двустороннюю электрическую шину 106. Мощность потребляется тяговыми электродвигателями 108. В некоторых вариантах воплощения, KESS 120 действует как первичный или главный источник электропитания для тяговых электродвигателей 108. Если KESS 120 не может полностью снабжать тяговые электродвигатели 108 необходимой мощностью, то тяговые электродвигатели 108 могут принимать мощность от генератора/двигателя 103 внутреннего сгорания, который, как проиллюстрировано на ФИГ. 15, также подает мощность на двустороннюю электрическую шину 106. Следовательно, при этой компоновке, KESS 120 является первичным поставщиком энергии на систему тяги 102 с генератором/двигателем 103 внутреннего сгорания, обеспечивающим резервное электропитание. KESS 120 является более подходящим источником электропитания, чем генератор/двигатель 103 внутреннего сгорания. Следовательно, при использовании более подходящего источника электропитания, во-первых, система тяги 102 может повышать скорость быстрее, чем может позволить стандартная система привода. Кроме того, использование KESS 120 в качестве первичного поставщика энергии может снизить потребность в работе генератора/двигателя 103 внутреннего сгорания на полную мощность. В частности, как было описано выше, использование KESS 120 в качестве первичного источника электропитания для системы тяги 102 может позволить генератору/двигателю 103 внутреннего сгорания работать при более равномерной выходной мощности, что позволяет экономить топливо и снижает требования к выходной мощности двигателя внутреннего сгорания.
[0081] Следовательно, во время работы горного оборудования 100, контроллер 150 может быть сконфигурирован для определения энергопотребления на двусторонней электрической шине 106 и определения энергии, доступной через KESS 120. Когда энергия, доступная через KESS 120, удовлетворяет энергопотреблению, контроллер 150 может быть сконфигурирован для работы KESS 120 в качестве первичного источника электропитания для двусторонней электрической шины 106 (например, для регулирования скорости вращения маховика 122, включенного в KESS 120). Однако, когда энергия, доступная через KESS 120, не может удовлетворять энергопотреблению, контроллер 150 может управлять генератором/двигателем 103 внутреннего сгорания в качестве вторичного источника электропитания (например, с любой энергией, имеющейся в KESS 120) для двусторонней электрической шины 106, чтобы удовлетворять энергопотреблению.
[0082] ФИГ. 16 иллюстрирует поток мощности в горном оборудовании 100 для выполнения тягового усилия без использования KESS 120. В этой ситуации, тяговые электродвигатели 108 потребляют энергию из двусторонней электрической шины 106, которая подается лишь генератором/двигателем 103 внутреннего сгорания. Эта ситуация может быть использована, когда KESS 120 не заряжена, плохо функционирует или отсутствует.
[0083] ФИГ. 17 иллюстрирует поток мощности в горном оборудовании 100 для выполнения легкого торможения. Как проиллюстрировано на ФИГ. 17, в ходе торможения системы тяги 102, тяговые электродвигатели 108 действует в качестве генераторов и подает электроэнергию на двустороннюю электрическую шину 106. В ситуации, проиллюстрированной на ФИГ. 17 (легкое торможение), энергию, подаваемую тяговыми электродвигателями 108, можно подавать на генератор, включенный в генератор/двигатель 103 внутреннего сгорания. Генератор может использовать полученную энергию для ускорения линии возбуждения между генератором/двигателем 103 внутреннего сгорания и гидравлическими насосами 104 (например, ускорять двигатель внутреннего сгорания до заданной точки скорости, когда на топливные форсунки подается команда на прерывание подачи топлива на двигатель внутреннего сгорания). В некоторых ситуациях, когда линия возбуждения приводится в действие генератором, включенным в генератор/двигатель 103 внутреннего сгорания, генератор/двигатель 103 внутреннего сгорания снижает потребление топлива (например, для работы при нулевом уровне топлива).
[0084] Аналогично, ФИГ. 18 иллюстрирует поток мощности в горном оборудовании 100 для выполнения жесткого торможения и зарядки KESS 120. Как проиллюстрировано на ФИГ. 18, в этих ситуациях тяговые электродвигатели 108 действует в качестве генераторов и подают электроэнергию на двустороннюю электрическую шину 106. В ситуации, проиллюстрированной на ФИГ. 18 (жесткое торможение), энергия подается на генератор тяговыми электродвигателями 108, и при подаче на двустороннюю электрическую шину 106, может быть подана на генератор, включенный в генератор/двигатель 103 внутреннего сгорания, и на KESS 120.
[0085] ФИГ. 19 иллюстрирует поток мощности в горном оборудовании 100 для выполнения жесткого прерывания без зарядки KESS 120 (например, KESS 120 заполнена, плохо функционирует или не представлена). Как проиллюстрировано на ФИГ. 19, в этих ситуациях, тяговые электродвигатели 108 действуют в качестве генераторов и подают электроэнергию на двустороннюю электрическую шину 106. Часть подаваемой мощности подается на генератор, включенный в генератор/двигатель 103 внутреннего сгорания. Однако, часть подаваемой мощности также подается на одну или более решеток 112 тормозных резисторов, которые преобразовывают энергию в тепло.
[0086] Следует понимать, что другие режимы работы может быть использован с KESS 120. Например, в некоторых вариантах воплощения, генератор/двигатель 103 внутреннего сгорания может быть использован в качестве первичного источника электропитания системы тяги 102, и KESS 120 может обеспечивать резервный источник электропитания. В этой конфигурации, контроллер может быть сконфигурирован для выпуска команд, подаваемых на KESS 120, которые могут быть созданы, исходя из управления скоростью системы тяги 102.
[0087] Также, в некоторых вариантах воплощения обеспечен пользовательский интерфейс для горного оборудования 100, который позволяет оператору конфигурировать KESS 120. В некоторых вариантах воплощения, пользовательский интерфейс также может отображать (например, текстуально или графически) текущее количество энергии, накапливаемой в KESS 120.
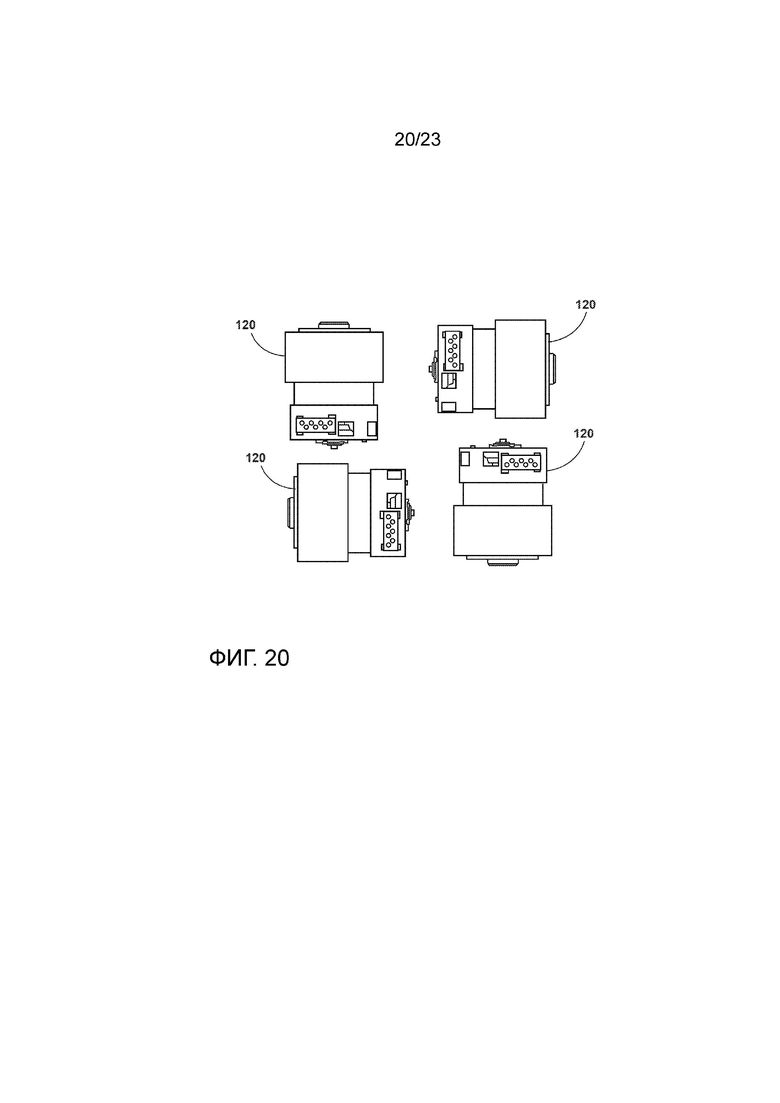
[0088] Также следует понимать, что для конкретной горной машины может быть использовано более одной KESS 120, в зависимости от энергетических потребностей машины и характеристик KESS 120. Также, в некоторых вариантах воплощения, несколько KESS 120 может быть использовано для снижения гироскопических эффектов, связанных с KESS (вращение маховика). Например, два отдельных KESS 120 (первая KESS 120 и вторая KESS 120) могут содержаться в одиночном корпусе с маховиками 122, вращающимися во встречном направлении, что снижает гироскопические воздействия на машину. Например, первая KESS 120 может включать в себя первый маховик 122, который вращается в первом направлении, а вторая KESS 120 может включать в себя второй маховик 122, который вращается во втором направлении, противоположном первому направлению. Аналогично, четыре KESS 120 (первая KESS 120, вторая KESS 120, третья KESS 120 и четвертая KESS 120) могут быть расположены по четырем главным направлениям вдоль плоскости, для снижения гироскопических эффектов. Например, как проиллюстрировано на ФИГ. 20, первая KESS 120 может быть расположена по первому главному направлению вдоль плоскости, вторая KESS 120 может быть расположена по второму главному направлению вдоль плоскости, третья KESS 120 может быть расположена по третьему главному направлению вдоль плоскости, а четвертая KESS 120 может быть расположена по четвертому главному направлению вдоль плоскости.
[0089] Как было отмечено выше, горное оборудование 100 может включать в себя погрузочную машину, такую как LHD, как правило, используемую в условиях подземных горных работ. Как проиллюстрировано на ФИГ. 20, LHD 200 включает в себя ковш 202, опирающийся на один или более кронштейнов 204, в которой ковш 202 движется, по меньшей мере, в одном направлении (например, в горизонтальном, в вертикальном, под углом к горизонтальному положению, или в сочетании этих направлений). Ковш 202 можно перемещать, с использованием одного или более приводов (изменяющих положение ковша 202, кронштейнов 204, или их обоих), таких как один или более гидравлических приводов, силовых цилиндров, и т.п, включенных в LHD 200. Ковш 202 может двигаться, исходя из входного сигнала, полученного от органа управления, такого как джойстик, рычаг, кнопка, сенсорный экран, и т.п, включенного в LHD 200. Контроллер, такой как контроллер 150, описанный выше или отдельный, аналогично контроллеру, включенному в LHD 200, может принимать входной сигнал и управлять одним или более приводами, например, путем отправления команд на один или более приводов. В некоторых вариантах воплощения, контроллер также сконфигурирован для обеспечения функциональности автоматического возврата к копанию.
[0090] Например, когда ковш 202 LHD 200 не находится в положении копания (например, в положении разгрузки, как проиллюстрировано на ФИГ. 21), оператор, управляющий LHD 200, может нажать на механизм выбора (например, механизм выбора «возврата к копанию»), такой как кнопка, расположенная на органе управления, включенном в LHD 200 (например, на правом или левом ручном джойстике LHD 200, сенсорном экране, и т.п.), или на удаленном пункте управления LHD 200. Когда оператор выбирает этот механизм выбора, контроллер 150 принимает сигнал от механизма выбора (например, непосредственно или по одной или более сетей), и в ответ автоматически контролирует один или более приводов, связанных с ковшом 202, для перемещения ковша 202 в заданное положение копания (например, на заданную высоту, заданный угол или их сочетание) (см., например, ФИГ. 22). Как проиллюстрировано на ФИГ. 22, положение возврат к копанию может быть задано как положение ковша 202, приблизительно горизонтальное относительно земли или раскапываемого материала.
[0091] Например, контроллер 150 может извлечь заданное положение копания из памяти (такой как память 154, включенная в контроллер 150) и сопоставить сохраненное заданное положение копания с текущим положением ковша 202. Как было описано ниже, контроллер 150 может использовать данные, собранные одним или более датчиками, для определения текущего положения ковша 202. Когда положения различаются, контроллер 150 может управлять одни или более приводами для изменения текущего положения ковша 202, чтобы оно совпадало с сохраненным заданным положением копания. Например, когда текущая высота ковша 202 больше, чем высота, включенная в заданное положение копания, контроллер 150 может управлять одним или более приводами для опускания ковша 202. Аналогично, когда текущий угол ковша 202 больше, чем угол, включенный в заданное положение копания, контроллер 150 может управлять одним или более приводами для уменьшения угла ковша 202.
[0092] В некоторых вариантах воплощения, контроллер 150 может периодически сопоставлять текущее положение ковша 202 с сохраненным заданным положением копания, при передвижении ковша 202 до выравнивания положений. В качестве альтернативы или в дополнение, контроллер 150 может первоначально сопоставлять текущее положение ковша 202 с сохраненным заданным положением копания и определять количество движений, необходимое для выравнивания ковша 202 с сохраненным заданным положением копания. Контроллер 150 затем может отправить команду на перемещение ковша 202, исходя из определенного расстояния. Следовательно, в любой конфигурации, контроллер 150 передает разницу между текущим положением и сохраненным положением в виде одной или серии команд на один или более приводов, моделирующих команды, полученные от органа управления. Следовательно, использование механизма выбора позволяет оператору сосредоточиться на управлении LHD 200, без необходимости также в выполнении нескольких движений джойстиком для возвращения ковша 202 в положение копания.
[0093] В некоторых вариантах воплощения, оператор может вручную отрегулировать заданное положение копания (например, заданную высоту, заданное угол или их сочетание), чтобы оно соответствовало предпочтениям операторам или рабочим условиям. Например, оператор может иметь возможность отправить сигнал, когда ковш 202 находится в желаемом положении копания (например, путем выбора механизма выбора или управления органом управления). Контроллер 150 принимает входной сигнал оператора и сохраняет текущее положение ковша 202 (например, текущую высоту, текущий угол или их сочетание). Контроллер 150 может определять текущее положение, исходя из данных, собранных одним или более датчиками, имеющими связь с контроллером 150 (например, датчиком давления, кодовым датчиком, инклинометром, и т.п.). Сохраненная информация о положении может быть вызвана повторно и применена, когда оператор впоследствии выбирает механизм выбора «возврат к копанию». В некоторых вариантах воплощения, модифицированное заданное положение копания может быть сохранено в виде абсолютного положения (например, высота и угол). Однако, в качестве альтернативы или в дополнение, модифицированное заданное положение копания может быть сохранено как по умолчанию смещенное заданное положение копания (например, смещенная высота и смещенный угол). В некоторых вариантах воплощения, модифицированное положение копания может быть переустановлено в качестве заданного положения копания по умолчанию после отключения и перезапуска LHD 200. В других вариантах воплощения, модифицированное положение копания может быть оставлено в качестве заданного положения копания вручную по умолчанию (например, в ответ на выбор механизма выбора «переустановить по умолчанию»).
[0094] В качестве альтернативы или в дополнение, контроллер 150, включенный в LHD 200, может обеспечивать функциональность автоматического возврата стрелы в нижнее положение. Например, когда ковш 202 LHD 200 не находится в положении копания (например, в положении разгрузки, как проиллюстрировано на ФИГ. 21), оператор, управляющий LHD 200, может нажать механизм выбора (например, механизм выбора «возврат стрелы в нижнее положение»), такой как кнопка, расположенная на органе управления, включенном в LHD 200 (например, на правом или левом ручном джойстике LHD 200, сенсорном экране, и т.п.) или на удаленном пункте управления для LHD 200. Когда оператор выбирает этот механизм выбора, контроллер 150 принимает сигнал от механизма выбора (например, непосредственно или по одной или более сетей), и в ответ автоматически контролирует один или более приводов, связанных с ковшом 202, для перемещения ковша 202 в заданное положение переноски (например, на заданную высоту, заданный угол или их сочетание) (см., например, ФИГ. 23).
[0095] Например, контроллер 150 может извлечь заданное положение переноски из памяти (такой как память 154, включенная в контроллер 150) и сопоставлять сохраненное заданное положение переноски с текущим положением ковша 202. Как было описано выше, контроллер 150 может использовать данные, собранные одним или более датчиками, для определения текущего положения ковша 202. Когда положения различаются, контроллер 150 может управлять одним или более приводами для изменения текущего положения ковша 202, чтобы оно совпадало с сохраненным заданным положением переноски. Например, когда текущая высота ковша 202 меньше, чем высота, включенная в заданное положение переноски, контроллер 150 может управлять одним или более приводами для подъема ковша 202. Аналогично, когда текущий угол ковша 202 меньше, чем угол, включенный в заданное положение переноски, контроллер 150 может управлять одним или более приводами для увеличения угла ковша 202.
[0096] В некоторых вариантах воплощения, контроллер 150 может периодически сопоставлять текущее положение ковша 202 с сохраненным заданным положением переноски, при передвижении ковша 202 до выравнивания положений. В качестве альтернативы или в дополнение, контроллер 150 может первоначально сопоставлять текущее положение ковша 202 с сохраненным заданным положением переноски и определять количество движений, необходимое для выравнивания ковша 202 с сохраненным заданным положением переноски. Контроллер 150 затем может отправлять команду на передвижение ковша 202, исходя из определенного расстояния. Следовательно, в любой конфигурации контроллер 150 передает разницу между текущим положением и сохраненным положением в виде одной или серии команд на один или более приводов, моделирующих команды, полученные из органа управления. Следовательно, использование механизма выбора позволяет оператору сосредоточиться на управлении LHD 200, без необходимости также в выполнении нескольких движений джойстиком для возвращения ковша 202 в положение переноски.
[0097] В некоторых вариантах воплощения, оператор может вручную отрегулировать заданное положение переноски (например, заданную высоту, заданный угол или их сочетание), чтоб оно соответствовало предпочтениям оператора или рабочим условиям. Например, оператор может иметь возможность отправить сигнал, когда ковш 202 находится в желаемом положении переноски (например, путем выбора механизма выбора или управления органом управления). Контроллер 150 принимает входной сигнал оператора и сохраняет текущее положение ковша 202 (например, текущую высоту, текущий угол или их сочетание). Контроллер 150 может определять текущее положение, исходя из данных, собранных одним или более датчиками, имеющими связь с контроллером 150 (например, датчиком давления, кодовым датчиком, инклинометром, и т.п.). Сохраненная информация о положении может быть повторно вызвана и применена, когда оператор впоследствии выбирает механизм выбора «возврат стрелы в нижнее положение». В некоторых вариантах воплощения, модифицированное заданное положение переноски может быть сохранено в виде абсолютного положения (например, высоты и угла). Однако, в качестве альтернативы или в дополнение, модифицированное заданное положение переноски может быть сохранено в виде смещения относительно к заданному положению переноски по умолчанию (например, смещение высоты и смещение угла). В некоторых вариантах воплощения, модифицированное положение переноски может быть переустановлено в виде заданного положения переноски по умолчанию после отключения и перезапуска LHD 200. В других вариантах воплощения, модифицированное положение переноски может быть переустановлен в качестве заданного положения переноски вручную по умолчанию (например, в ответ на выбор механизма выбора «переустановка по умолчанию»).
[0098] Как проиллюстрировано на ФИГ. 23, положение переноски может быть задано как ковш 202, поворачивающийся назад и кронштейны 204 в опущенном положении (ковш 202 опущен и сгруппирован в положении, где ковш 202 находится в очень стабильном состоянии, вследствие чего машиной можно управлять на больших расстояниях, что выполняется, как правило, с использованием LHD). В частности, положение переноски, а впоследствии, и функциональность автоматического возврата стрелы в нижнее положение может обеспечивать преимущества в ситуациях, когда как только оператор заполняет ковш 202 или разгружает ковш 202, оператору приходится управлять LHD 200 на большом расстоянии (например, приблизительно более 500 футов). Например, наземные колесные погрузчики обычно проходят менее 300 футов в ходе поездки туда и обратно между шахтным самосвалом и забоем под погрузкой. Это расстояние, как правило, не гарантирует размещение ковша в положении переноски. Скорее, при прохождении этого расстояния, кронштейны наземного погрузчика могут быть использованы для полного подъема ковша или опускания ковша назад в положение копания. Напротив, обратные расстояния LHD обычно составляют 1000 футов или более. Следовательно, функциональность автоматического возврата стрелы в нижнее положение обеспечивает преимущества для LHD, управляемых на больших расстояниях, когда нежелательно (например, в целях стабильности) работать с полностью поднятым ковшом 202.
[0099] Таким образом, варианты воплощения изобретения обеспечивают, среди прочего, систему накопления кинетической энергии для горной машины. Система накопления кинетической энергии может быть использована для энергоснабжения системы тяги горной машины, с использованием энергии, сохраненной в ходе запуска двигателя внутреннего сгорания, низкой нагрузки двигателя внутреннего сгорания и событий торможения.
[00100] Различные признаки и преимущества изобретения изложены в следующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНАЯ МАШИНА И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2016 |
|
RU2720393C2 |
| ГОРНАЯ МАШИНА И СИСТЕМА АККУМУЛИРОВАНИЯ ЭНЕРГИИ ДЛЯ НЕЕ | 2016 |
|
RU2722775C2 |
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ДВОЙНЫМ ЭЛЕКТРОПИТАНИЕМ | 1994 |
|
RU2100221C1 |
| ЭЛЕКТРОГЕНЕРИРУЮЩАЯ УСТАНОВКА, СНАБЖЕННАЯ СРЕДСТВАМИ АККУМУЛИРОВАНИЯ ЭНЕРГИИ, И СПОСОБ УПРАВЛЕНИЯ ТАКОЙ УСТАНОВКОЙ | 2012 |
|
RU2611725C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ УСТРОЙСТВОМ ГОНДОЛЫ, ГОНДОЛА, СОДЕРЖАЩАЯ ТАКУЮ СИСТЕМУ, И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2011 |
|
RU2572730C2 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРООБОРУДОВАНИЯ ЭКСКАВАТОРА С ИСПОЛЬЗОВАНИЕМ РЕКУПЕРИРОВАННОЙ ЭНЕРГИИ | 2023 |
|
RU2819222C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ EGR (РЕЦИРКУЛЯЦИЕЙ ОТРАБОТАВШИХ ГАЗОВ) ДЛЯ ПОВЫШЕННЫХ ДОРОЖНЫХ КАЧЕСТВ | 2015 |
|
RU2690601C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2547154C1 |
| СИСТЕМЫ, УСТРОЙСТВА И СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ РЕАКТИВНОЙ МОЩНОСТЬЮ | 2009 |
|
RU2519636C2 |


Группа изобретений относится к электрическим тяговым системам транспортных средств. Горная машина содержит двустороннюю электрическую шину, источник электропитания, связанный с двусторонней электрической шиной, электродвигатель, связанный с двусторонней электрической шиной, систему накопления кинетической энергии, связанную с двусторонней электрической шиной, и контроллер, сконфигурированный для поддержания связи с системой накопления кинетической энергии и источником электропитания. Причем электродвигатель предназначен для снабжения энергией, имеющейся на двусторонней электрической шине. При этом контроллер сконфигурирован для управления системой накопления кинетической энергии в качестве первичного источника электропитания для двусторонней электрической шины и для управления источником электропитания в качестве вторичного источника электропитания для двусторонней электрической шины, когда система накопления кинетической энергии не может удовлетворять энергопотреблению на двусторонней электрической шине. Также заявлен способ эксплуатации горной машины. Технический результат заключается в повышении КПД циклического режима работы горного оборудования. 2 н. и 18 з.п. ф-лы, 23 ил.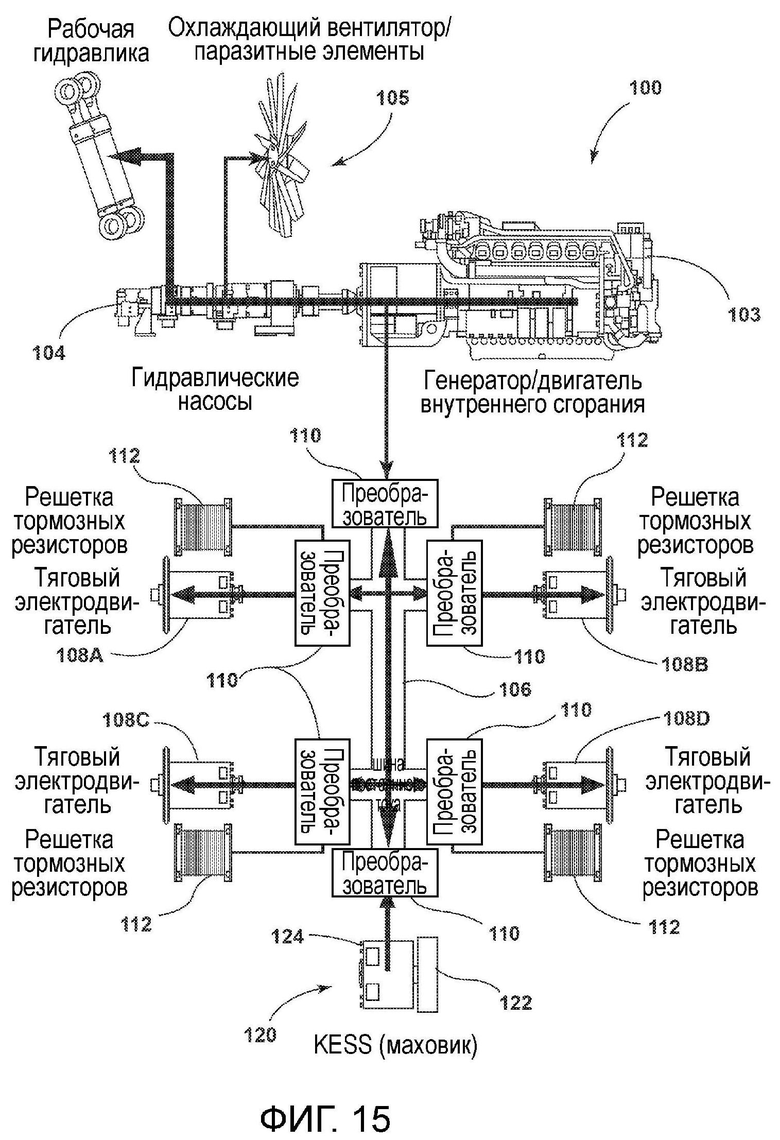
1. Горная машина, содержащая:
- двустороннюю электрическую шину;
- источник электропитания, связанный с двусторонней электрической шиной;
- электродвигатель, связанный с двусторонней электрической шиной, причем электродвигатель предназначен для снабжения энергией, имеющейся на двусторонней электрической шине;
- систему накопления кинетической энергии, связанную с двусторонней электрической шиной; и
- контроллер, сконфигурированный для поддержания связи с системой накопления кинетической энергии и источником электропитания,
в которой контроллер сконфигурирован для управления системой накопления кинетической энергии в качестве первичного источника электропитания для двусторонней электрической шины и для управления источником электропитания в качестве вторичного источника электропитания для двусторонней электрической шины, когда система накопления кинетической энергии не может удовлетворять энергопотреблению на двусторонней электрической шине.
2. Горная машина по п. 1, в которой источник электропитания включает в себя двигатель внутреннего сгорания и переключаемый реактивный электродвигатель/генератор.
3. Горная машина по п. 2, в которой переключаемый реактивный электродвигатель/генератор выполнен с возможностью повышения скорости линии возбуждения, связанной с двигателем внутреннего сгорания в ходе торможения приводного механизма.
4. Горная машина по п. 1, в которой источник электропитания содержит стелющийся кабель.
5. Горная машина по п. 1, в которой источник электропитания включает в себя батарею.
6. Горная машина по п. 1, в которой источник электропитания включает в себя топливный элемент.
7. Горная машина по п. 1, в которой электродвигатель включает в себя второй переключаемый реактивный электродвигатель.
8. Горная машина по п. 1, в которой контроллер дополнительно сконфигурирован для управления системой накопления кинетической энергии для накопления энергии в ходе торможения приводного механизма.
9. Горная машина по п. 1, в которой система накопления кинетической энергии содержит переключаемый реактивный электродвигатель.
10. Горная машина по п. 1, в которой система накопления кинетической энергии содержит маховик, предназначенный для работы приблизительно при 0-6500 оборотах в минуту.
11. Горная машина по п. 1, в которой система накопления кинетической энергии производит энергию приблизительно до 4000 лошадиных сил в секунду.
12. Горная машина по п. 1, в которой скорость вращения маховика понижается с повышением скорости приводного механизма, а скорость вращения маховика повышается с понижением скорости приводного механизма.
13. Горная машина по п. 1, дополнительно содержащая вторую систему накопления кинетической энергии, включенную в общий корпус с первой системой накопления кинетической энергии, причем вторая система накопления кинетической энергии включает в себя второй маховик.
14. Горная машина по п. 13, в которой первый маховик первой системы накопления кинетической энергии выполнен с возможностью вращения в первом направлении, и в которой второй маховик выполнен с возможностью вращения во втором направлении, противоположном первому направлению.
15. Горная машина по п. 1, дополнительно содержащая вторую систему накопления кинетической энергии, третью систему накопления кинетической энергии и четвертую систему накопления кинетической энергии, в которой первая система накопления кинетической энергии расположена по первому главному направлению вдоль плоскости, вторая система накопления кинетической энергии расположена по второму главному направлению вдоль плоскости, третья система накопления кинетической энергии расположена по третьему главному направлению вдоль плоскости, и четвертая система накопления кинетической энергии расположена по четвертому главному направлению вдоль плоскости.
16. Горная машина по п. 1, в которой система накопления кинетической энергии соединена с двусторонней электрической шиной через преобразователь мощности, который включает в себя несколько параллельных преобразователей мощности, подающих энергию в систему накопления кинетической энергии из двусторонней электрической шины.
17. Горная машина по п. 1, в которой система накопления кинетической энергии соединена с двусторонней электрической шиной через преобразователь мощности, включает в себя несколько параллельных преобразователей мощности, подающих энергию в двустороннюю электрическую шину из системы накопления кинетической энергии.
18. Горная машина по п. 1, в которой контроллер поддерживает связь с источником электропитания через контроллер двигателя внутреннего сгорания.
19. Способ эксплуатации горной машины, содержащий:
- определение, с помощью контроллера, сконфигурированного для поддержания связи с системой накопления кинетической энергии и источником электропитания, включенным в горную машину, энергопотребления на двусторонней электрической шине, включенной в горную машину;
- определение, с помощью контроллера, энергии, доступной через систему накопления кинетической энергии;
когда энергия, доступная через систему накопления кинетической энергии, удовлетворяет энергопотреблению, - управление, с помощью контроллера, системой накопления кинетической энергии в качестве первичного источника электропитания для двусторонней электрической шины; и
когда энергия, доступная через систему накопления кинетической энергии, не может удовлетворять энергопотреблению, - управление, с помощью контроллера, источником электропитания в качестве вторичного источника электропитания для двусторонней электрической шины.
20. Способ по п. 19, в которой управление системой накопления кинетической энергии включает в себя регулирование скорости вращения маховика, связанного с переключаемым реактивным электродвигателем.
| WO 2008076694 A2, 26.06.2008 | |||
| DE 202011108033 U1, 28.12.2011 | |||
| RU 94021358 A1, 27.08.1996 | |||
| СПОСОБ МИНИМИЗАЦИИ РАСХОДА ТОПЛИВА ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С СИСТЕМОЙ НАКОПИТЕЛЕЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2495266C2 |

