Изобретение относится к системе управления электрическим устройством гондолы летательного аппарата, а также к гондоле, снабженной подобной системой, и к способу, осуществляемому посредством такой системы.
Летательный аппарат приводится в движение посредством нескольких турбореактивных двигателей, каждый из которых находится в гондоле, вмещающей также группу вспомогательных приводных устройств, имеющих отношение к работе турбореактивного двигателя и выполняющих различные функции во время его работы или простоя.
К таким вспомогательным приводным устройствам относится, в частности, механическая система реверса тяги.
В общем случае гондола имеет трубчатую конструкцию с воздухозаборником выше по потоку от турбореактивного двигателя, средней секцией, охватывающей вентилятор турбореактивного двигателя, и задней секцией, вмещающей средства реверса тяги и охватывающей камеру сгорания турбореактивного двигателя, и обычно заканчивается реактивным соплом, установленным ниже по потоку от турбореактивного двигателя.
Гондола такого типа предназначена для размещения в ней двухконтурного турбореактивного двигателя, который посредством вращающихся лопастей вентилятора способен генерировать горячий воздушный поток, выходящий из камеры сгорания турбореактивного двигателя, и холодный воздушный поток, циркулирующий снаружи от турбореактивного двигателя по кольцевому тракту.
Реверсор тяги предназначен для повышения эффективности торможения летательного аппарата во время посадки путем перенаправления вперед по меньшей мере части тяги, создаваемой турбореактивным двигателем.
На этом этапе реверсор тяги перекрывает тракт циркуляции холодного воздушного потока и направляет поток к передней части гондолы, создавая тем самым обратную тягу, которая складывается с торможением колес летательного аппарата. В зависимости от типа реверсора для обеспечения такой переориентации холодного потока могут использоваться различные средства.
Например, из документа US 2002/157376 А известна система управления одним или более реверсором тяги турбореактивного двигателя.
Широко известны различные типы реверсоров тяги.
Например, конструкция одного из таких устройств содержит по меньшей мере один подвижный элемент, перемещаемый между закрытым (убранным) положением и открытым (развернутым) положением, причем в открытом положении указанный элемент участвует в создании реверса тяги, и по меньшей мере одну группу электромеханических управляющих органов для перемещения указанного подвижного элемента между закрытым и открытым положениями.
Указанный подвижный элемент может представлять собой, не ограничиваясь перечисленным, капот гондолы, заслонки и/или створки реверса выше или ниже по потоку от капота гондолы.
Основными компонентами группы электромеханических управляющих органов являются электрические приводы для приведения в действие указанных подвижных элементов и по меньшей мере один электрический фиксатор, называемый также первым фиксатором.
Одним из важных аспектов использования подобных гондол с электрическими устройствами является организация управления и контроля работы указанных различных устройств.
Поэтому для приведения в действие группы электромеханических управляющих органов, перемещающих подвижные элементы реверсора тяги между их открытым и закрытым положениями, используют, с учетом конструктивного исполнения системы, по меньшей мере одну вращающуюся электрическую машину, при этом управление осуществляется по меньшей мере одним электронным контроллером типа используемого в системе электроприводного реверсирования тяги марки ETRAS (система ETRAS), который имеет электрическое соединение с контроллером двигателя типа используемого в электронно-цифровой системе с полной ответственностью FADEC (система FADEC) и предназначенного для управления и контроля работы соответствующего турбореактивного двигателя.
Известно, что в ситуациях прямой и обратной тяги вращающаяся электрическая машина переходит при запуске в двигательный режим для преодоления совокупности различных аэродинамических нагрузок и сил трения, а по завершении хода подвижных элементов возвращается в генераторный режим.
Когда вращающаяся электрическая машина является генератором, энергию указанной машины, связанную с торможением, отводят путем рассеивания в разрядном элементе типа разрядного сопротивления.
Однако такое рассеяние может создавать проблемы, относящиеся к обеспечению тепловых режимов работы.
Поэтому силовые компоненты, связанные с управлением (например, силовые транзисторы или устройства копирования состояния), приходится снабжать пластиной для рассеяния энергии.
Однако использование такой пластины в значительной мере увеличивает массу электронного оборудования и усложняет монтаж электронных компонентов на соответствующих платах.
Кроме того, принимая в расчет количество выделяемой энергии, ее рассеяние может привести к чрезмерному увеличению размеров электронного контроллера.
Одной из задач настоящего изобретения является устранение указанных недостатков.
Другой задачей является оптимизация управления электроэнергией и распределения электроэнергии в гондоле, а также общей энергетической эффективности гондолы.
Кроме того, принимая во внимание значительную массу электропроводки и с учетом оптимизации электрической системы внутри летательного аппарата, целесообразно снизить отбор электроэнергии из сети электропитания летательного аппарата.
Еще одной задачей изобретения является повышение надежности электронного контроллера, управляющего устройствами гондолы, и уменьшение его массы.
Для решения указанных задач предлагается система управления электрическим устройством гондолы, причем указанное устройство содержит по меньшей мере один подвижный элемент, перемещаемый в закрытое положение и в развернутое положение, при этом указанная система управления содержит по меньшей мере один электромеханический приводной орган для приведения в действие указанного подвижного элемента; электрический привод указанного электромеханического приводного органа; блок управления и контроля, предназначенный для управления электроприводом с целью перемещения подвижного элемента в закрытое положение и/или в развернутое положение, при этом предложенная система отличается тем, что содержит также систему для рекуперации энергии торможения от указанного электрического привода при перемещении подвижного элемента в закрытое и/или в развернутое положение.
Благодаря предложенному изобретению система управления снова использует энергию электрического привода в качестве источника движущей силы.
Такое решение позволяет снизить отбор электроэнергии из сети электропитания летательного аппарата и оптимизировать управление энергией гондолы.
В частных вариантах осуществления предлагаемая система управления может характеризоваться одним или несколькими из перечисленных ниже признаков, которые могут присутствовать как по отдельности, так и в различных технически осуществимых комбинациях:
- система рекуперации энергии содержит по меньшей мере одну электрическую цепь, в состав которой входит устройство накопления электрической энергии, подключенное к указанному электрическому приводу;
- система рекуперации энергии содержит две идентичные электрические цепи, в состав каждой из которых входит по меньшей мере одно устройство накопления электрической энергии, подключенное к электрическому приводу;
- каждая цепь содержит также переключатель с двумя состояниями, причем одно из двух состояний предназначено для подключения электрического привода к устройству накопления энергии;
- блок управления и контроля выполнен с возможностью управления цепью рекуперации энергии торможения до достижения максимального заряда устройства или устройств накопления энергии и управления цепью рассеяния энергии по достижении максимального заряда устройства или устройств накопления энергии;
- блок управления и контроля выполнен с возможностью управления цепью двигателя, в которой происходит разряд накопленной энергии торможения до отбора электроэнергии из внешней сети электропитания;
- блок управления и контроля выполнен с возможностью управления цепью, в которой происходит рассеяние энергии торможения в электрическом приводе;
- устройство накопления электроэнергии представляет собой конденсатор, суперконденсатор или ультраконденсатор;
- электрическое устройство представляет собой реверсор тяги.
Кроме того, изобретение относится к гондоле, содержащей по меньшей мере одно электрическое устройство и систему управления с указанными выше признаками.
Изобретение относится также к способу управления, осуществляемому посредством системы управления с указанными выше признаками и содержащему этап, предусматривающий рекуперацию электроэнергии торможения от электрического привода при перемещении подвижного элемента в закрытое положение и/или в развернутое положение.
В частных вариантах осуществления предлагаемый способ может характеризоваться следующим признаком:
- если устройство представляет собой реверсор тяги, рекуперацию электроэнергии торможения от электрического привода осуществляют при перемещении подвижного элемента в закрытое положение в режиме прямой тяги указанного реверсора тяги и/или в развернутое положение в режиме обратной тяги указанного реверсора тяги.
Другие признаки, задачи и преимущества изобретения станут очевидны по прочтении подробного описания примерных вариантов его осуществления, не имеющих ограничительного характера и приводимых ниже со ссылками на сопроводительные чертежи, где:
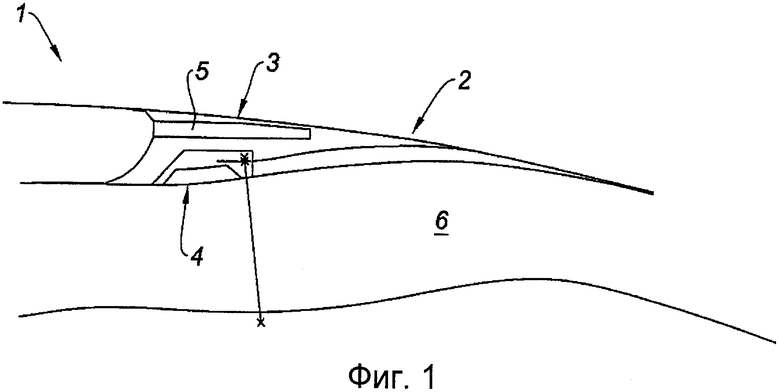
фиг. 1 - вид в разрезе одного из вариантов выполнения реверсора тяги;
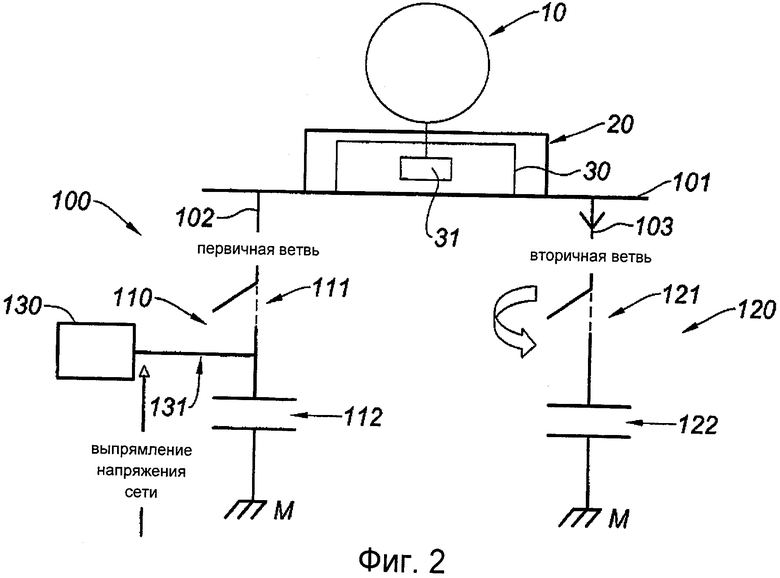
фиг. 2 - функциональная схема системы управления реверсором тяги летательного аппарата согласно одному из вариантов осуществления изобретения.
Как показано на фиг.1, гондола 1 содержит электрический реверсор тяги, обозначенный в целом номером позиции 2.
Реверсор 2 тяги содержит по меньшей мере один подвижный элемент, который установлен с возможностью перемещения между закрытым (убранным) положением и открытым (развернутым) положением и который в открытом положении участвует в создании реверса тяги.
На фиг.1 показан один из примерных вариантов выполнения решетчатого реверсора тяги, при этом подвижные элементы представлены капотом, перемещаемым между развернутым положением, в котором он открывает в гондоле проход для отклоняемого воздушного потока, и убранным положением, в котором он закрывает указанный проход.
Переориентация воздушного потока осуществляется посредством отклоняющих решеток 5, соединенных со вторыми подвижными элементами, то есть со створками 4 реверса выше по потоку от капота 3, причем назначение капота 3 состоит лишь в простом перемещении, обеспечивающем обнажение или перекрытие отклоняющих решеток 5.
Створки 4 реверса образуют собой запорные заслонки, приводимые в действие перемещением капота 3, в результате которого происходит перекрытие тракта 6 циркуляции холодного потока ниже по потоку от решеток 5, обеспечивающее оптимальную переориентацию холодного воздушного потока.
Следует отметить, что варианты выполнения реверсора тяги никоим образом не ограничены проиллюстрированной конструкцией и реверсор может представлять собой любое известное устройство реверсирования тяги, в частности реверсор тяги с заслонками или створками реверса ниже по потоку от капота гондолы.
Представленная система управления подвижными элементами 3, 4 содержит по меньшей мере одну группу электромеханических управляющих органов (не показаны) для перемещения подвижных элементов 3, 4 между положениями, соответствующими закрытию и открытию реверсора 2 тяги.
Основными компонентами группы электромеханических управляющих органов являются электрические приводы для приведения в действие подвижных элементов 3, 4, по меньшей мере один электрический фиксатор (называемый «первым фиксатором») для удержания каждого из подвижных элементов 3, 4, а также указатели состояния и датчики управляющих органов и подвижных элементов реверсора тяги.
В состав датчиков могут входить датчики положения и/или приближения.
Известным образом реверсор тяги можно дополнительно снабдить вторым и третьим электрическими фиксаторами.
Кроме того, имеется силовой привод 10 (см. фиг.2), соединенный с электромеханическими управляющим органами одним или несколькими гибкими передаточными валами.
В состав указанного силового привода 10 входит по меньшей мере одна вращающаяся электрическая машина.
В соответствии с одним из примерных вариантов, не имеющих ограничительного характера, электромеханические управляющие органы приводятся в действие посредством по меньшей мере одного электронного контроллера 20 типа используемого в системе электроприводного реверсирования тяги марки ETRAS (система ETRAS), который имеет электрическое соединение с контроллером двигателя типа используемого в электронно-цифровой системе с полной ответственностью FADEC (система FADEC) и предназначенной для управления и контроля работы соответствующего турбореактивного двигателя.
Другим вариантом осуществления предусмотрено управление непосредственно системой FADEC.
Электронный контроллер 20 представляет собой вычислительное устройство, специально предназначенное для использования с гондолой или частью гондолы (например, с подвижным элементом или конкретным управляющим органом), в частности - для преобразования команд, поступающих от системы FADEC на открытие или закрытие реверсора тяги, в последовательности сигналов управления подвижными элементами и соответствующими электромеханическими управляющими органами, а кроме того - для передачи на систему FADEC данных о состоянии управляющих органов и положении подвижных элементов.
В частности, электронный контроллер 20 содержит блок 30 управления и контроля, обеспечивающий управление работой вращающейся электрической машины 10 посредством вычислительного устройства и соответствующих программных средств.
В качестве вращающейся электрической машины 10 использован реверсивный генератор переменного тока, работающий в режиме альтернатора, то есть в качестве электрогенератора, и в режиме запуска, то есть в качестве электродвигателя для приведения соответствующих электромеханических управляющих органов в движение посредством передаточных валов.
Как и в традиционной конструкции, электродвигатель содержит фазный ротор, размещенный внутри соосного ему статора.
Можно использовать электродвигатель любого известного типа, поэтому его подробное описание не приводится.
Двигатель 10 переходит из двигательного режима в генераторный режим при работе реверсора 2 в режиме прямой и обратной тяги во время развертывания или закрывания подвижных элементов 3, 4 в процессе реверса тяги, то есть когда подвижные элементы 3, 4 перемещаются из закрытого положения и открытое положение и наоборот.
Одним из вариантов осуществления изобретения предусмотрено, что блок 30 управления выявляет переключение режимов электродвигателя 10 по перемене знака тока на разъемах электродвигателя 10.
Следует отметить, что такое переключение имеет место при двух разных заданных значениях уровня тока для режимов прямой и обратной тяги реверсора 2.
Указанные значения зависят, в частности, от вида осуществляемого реверса тяги.
Кроме того, в состав цепи электропитания летательного аппарата входит блок электропитания, соединенный по меньшей мере с одним входом 130 электропитания.
Основным назначением блока электропитания является управление электропитанием электрических устройств гондолы 1, в частности управляющих органов подвижных элементов 3, 4 реверсора тяги 2, и электродвигателя 10.
Блок электропитания подключен к блоку 30 управления и контроля по питающей шине 101.
Блок электропитания имеет один или более входов 130 электропитания, соединенных по линии 131 с электрической сетью 130 летательного аппарата.
На блок электропитания можно подавать переменное входное напряжение от системы, в общем случае 115 В, или же низкое постоянное напряжение 28 В.
Кроме того, можно подавать постоянное напряжение непосредственно из кабины пилота, в общем случае 350 В.
В случае если электрическая система летательного аппарата работает на переменном токе, блок электропитания обеспечивает выпрямление и фильтрацию тока, подавая постоянное напряжение на блок 30 управления и контроля по питающей шине 101.
Таким образом, блок электропитания преобразует и модифицирует электрический сигнал, поступающий из электрической сети летательного аппарата, с получением при этом регулируемого постоянного напряжения (115 В преобразуются в постоянное напряжение примерно 270 В) для питания электродвигателя 10 управляющих органов реверсора 2 тяги.
Кроме того, при необходимости блок электропитания может управлять разрядным сопротивлением электродвигателя или электродвигателей гондолы 1.
Как показано на фиг.2, в соответствии с изобретением цепь электропитания содержит также систему 100 для рекуперации энергии торможения электродвигателя 10 при его работе в генераторном режиме во время перемещения подвижных элементов 3, 4 в их закрытое и/или развернутое положение в режиме прямой и обратной тяги реверсора 2 тяги.
Система 100 рекуперации энергии торможения содержит две параллельные электрические цепи 110, 120 - первичную цепь 110 и вторичную цепь 120, причем две указанные цепи 110, 120 подключены к шине 101 питания и к массе М.
Первичная цепь 110 содержит по меньшей мере одно устройство 112 накопления электроэнергии, включенное между массой М и первичным переключателем 111, предназначенным для подключения электродвигателя 10 к устройству 112 накопления энергии.
В предпочтительном варианте указанное устройство 112 накопления электроэнергии может представлять собой конденсатор, суперконденсатор или двухслойный конденсатор, образованный последовательно включенными емкостными элементами, или же ультраконденсатор, обладающие более высокой способностью накопления энергии по сравнению с обычными конденсаторами.
В первичную цепь 110 включен также вход 130 электропитания сети летательного аппарата, причем соответствующие средства блока электропитания выполняют предварительное выпрямление и фильтрацию питающего напряжения.
В соответствии с одним из вариантов осуществления изобретения, вторичная цепь 120 содержит элементы, аналогичные тем, что использованы в первичной цепи 110.
То есть вторичная цепь 120 содержит вторичный переключатель 121 и вторичное устройство 122 накопления электроэнергии, один из разъемов которого подключен к массе, а второй - к переключателю 121.
Таким образом, вторичный переключатель 121 обеспечивает соединение электродвигателя 10 с устройством 122 накопления энергии.
Один из вариантов выполнения логической цепи управления блока 30 управления и контроля электродвигателя 10 состоит в следующем.
Блок 30 управления и контроля электродвигателя 10 реверсора 2 тяги выполнен с возможностью управления работой цепи управления двигателем, а также двух других цепей управления - цепи управления рекуперацией энергии торможения и цепи восстановления энергии торможения.
Следует отметить, что посредством блока 30 управления и контроля с электродвигателем 10 связан инвертор 31.
Инвертор 30 представляет собой выпрямительный мост, позволяющий выпрямлять переменный ток ротора двигателя 10, служащий также мостом управления фазами генератора переменного тока.
По окончании хода подвижных элементов 3, 4 реверсора 2 тяги в процессе их перемещения в режиме прямой или обратной тяги, когда двигатель 10 переходит в генераторный режим, блок управления и контроля осуществляет управление цепью рекуперации энергии торможения, то есть воздействует на инвертор таким образом, что тот переводит двигатель в генераторный режим, а также управляет накоплением энергии торможения от двигателя 10 во вторичном устройстве 122 накопления энергии.
Для этого переключатель 111 первичной цепи смещается в положение, в котором можно разомкнуть первичную цепь 110.
Кроме того, происходит изменение положения вторичного переключателя 121, который смещается так, чтобы замкнуть цепь вторичного устройства 122 накопления энергии, обозначенную на фиг. 2 пунктиром.
Поскольку в этот момент двигатель 10 отсоединен от сети 130 электропитания, на разъемах двигателя 10 происходит увеличение напряжения до некоторого допустимого значения, при этом в течение времени торможения двигателя осуществляется зарядка вторичного устройства 122 накопления энергии.
В результате обеспечивается рекуперация остаточной энергии торможения двигателя 10 реверсора 2 тяги. Как поясняется ниже, такое решение позволяет снова использовать эту энергию в качестве источника движущей силы.
Вторичное устройство 122 накопления энергии заряжается до максимальной величины, что отслеживается соответствующими контролирующими программными средствами блока 30 управления и контроля.
Одним из возможных вариантов осуществления изобретения предусмотрено, что при максимальном заряде вторичного устройства 122 накопления энергии блок управления и контроля может осуществлять управление цепью восстановления остаточной энергии и теплорассеяния.
Следует отметить, что согласно другому варианту параметры устройств накопления рассчитаны таким образом, чтобы поддерживать все фазы работы реверсора тяги без привлечения вспомогательной системы разряда.
Блок управления и контроля осуществляет изменение положения вторичного переключателя 121, который смещается таким образом, чтобы замкнуть цепь вторичного устройства 122 накопления энергии, что показано на фиг.2 сплошной линией.
Затем блок питания возвращает остаточную энергию в разрядное сопротивление с целью рассеяния указанной энергии.
Следует отметить, что управление цепью восстановления энергии не осуществляется до достижения максимального заряда вторичного устройства 122 накопления энергии.
Преимущество такого решения заключается в оптимальной рекуперации энергии торможения от двигателя 10 для последующих перемещений подвижных элементов 3, 4.
В режиме прямой или обратной тяги, когда вращающаяся электрическая машина 10 переходит в двигательный режим, причем указанный режим выявляется путем считывания показаний тока на разъемах двигателя 10 контролирующими программными средствами, блок управления и контроля осуществляет управление цепью двигателя, то есть управляет потреблением электроэнергии, накопленной в первичном 112 и вторичном 122 устройствах накопления энергии.
С этой целью он обеспечивает изменение положения первичного переключателя 111 таким образом, чтобы замкнуть первичную цепь.
Он управляет разрядом первичного 112 и вторичного 122 устройств накопления энергии в соответствии с определенным алгоритмом управления, учитывая верхнее и нижнее пороговые значения заряда/разряда устройств накопления энергии и/или постоянных времени, например для подачи или рекуперации энергии.
При этом разряд первичного устройства 112 накопления энергии может происходить до или после разряда вторичного устройства 122 накопления энергии.
Алгоритм управления создан таким образом, что он позволяет уменьшить проблемы, связанные с чрезмерно сильной накачкой током и тепловым нагревом.
В результате достигается преимущество, состоящее в том, что управляющая система располагает дополнительной энергией, помимо энергии, поступающей с входа электропитания, в частности от сети 130 летательного аппарата.
За счет того, что накопленная энергия торможения разряжается перед отбором энергии из сети летательного аппарата, объем отбора энергии уменьшен, то есть обеспечено более эффективное управление электрической энергией гондолы.
На следующем этапе работы логической цепи управления блоком 30 управления и контроля, в зависимости от уровня энергии, необходимого для следующих фаз двигательного режима вращающейся электрической машины 10, указанный блок 30 может выдавать команду на заряд первичного устройства 112 накопления энергии с использованием энергии сети 130 летательного аппарата.
При этом одним из альтернативных вариантов осуществления изобретения предусмотрено, что, по окончании хода подвижных элементов 3, 4 на закрывание и повторении фиксации устройства, блок управления и контроля может выдать команду на снятие остаточной энергии торможения с двигателя 10 в генераторном режиме, которая должна была быть накоплена в первичном и вторичном устройствах 112, 122 накопления энергии.
Таким образом, он управляет цепью рассеяния остаточной энергии торможения в обмотках электродвигателя.
В сущности, длительность нахождения на земле достаточна для того, чтобы это рассеяние осуществлялось постепенно.
Благодаря описанному выше этапу, на котором для рассеяния энергии используют фазы вращающейся электрической машины в режиме генератора, не повышается внутренняя рабочая температура электронного контроллера 20, что улучшает надежность контроллера.
Кроме того, это позволяет обойтись без механического тормоза двигателя устройства, используемого в известных системах на случай превышения допустимой скорости устройства, поскольку скорость двигателя 10 регулируют с более эффективным управлением энергией в устройствах 112, 122 накопления энергии.
Специалистам в данной области будут очевидны преимущества предлагаемой системы относительно систем управления электрическими устройствами гондолы, известных из уровня техники. Предлагаемая система позволяет уменьшить отбор мощности из сети летательного аппарата и повысить общую энергетическую эффективность реверсора.
Предлагаемая система управления обладает значительными готовыми к немедленному использованию энергоресурсами и идеально подходит для коротких рабочих циклов, таких как в случае реверсора тяги.
Кроме того, предлагаемая система управления позволяет осуществлять сглаживание электрической мощности с целью подавления всплесков напряжения.
В сущности, предлагаемая система позволяет получить близкорасположенный источник энергии; учитывая близость источника, у пользователя будет больше времени в случае необходимости быстрого получения энергии.
Тем самым во всей цепи предотвращены повышенные значения производной тока по времени (di/dt), которые будут иметь место только в локальном контуре контроля (в противном случае повышенные значения di/dt присутствуют на всех ступенях, то есть на ступени выпрямления/интерфейса электрической сети летательного аппарата), а такие di/dt являются критическими и создают серьезные проблемы в отношении электромагнитной совместимости (ЭМС).
Изобретение относится к системе управления электрическим устройством гондолы. Указанное устройство содержит по меньшей мере один подвижный элемент, перемещаемый в закрытое положение и в развернутое положение. Система управления содержит по меньшей мере один электромеханический приводной орган для приведения в действие указанного подвижного элемента; электрический привод указанного электромеханического приводного органа; блок управления и контроля для управления электрическим приводом с целью перемещения подвижного элемента в закрытое и/или в развернутое положение. Система управления также содержит систему для рекуперации энергии торможения от указанного электрического привода при перемещении подвижного элемента в закрытое и/или в развернутое положение. Технический результат - оптимизация управления электроэнергией и распределения электроэнергии в гондоле и снижение отбора электроэнергии из сети электропитания летательного аппарата. 3 н. и 9 з.п. ф-лы, 2 ил.
1. Система управления электрическим устройством (2) гондолы, причем указанное устройство (2) содержит по меньшей мере один подвижный элемент (3, 4), перемещаемый в закрытое положение и в развернутое положение, при этом указанная система управления содержит по меньшей мере один электромеханический приводной орган для приведения в действие указанного подвижного элемента; электрический привод (10) указанного электромеханического приводного органа; блок (30) управления и контроля, предназначенный для управления электрическим приводом (10) с целью перемещения подвижного элемента в закрытое и/или в развернутое положение, при этом указанная система управления отличается тем, что она содержит также систему (100) для рекуперации энергии торможения от указанного электрического привода (10) при перемещении указанного подвижного элемента в закрытое и/или в развернутое положение.
2. Система по п.1, отличающаяся тем, что система (100) рекуперации энергии торможения содержит по меньшей мере одну электрическую цепь (120), в состав которой входит устройство (122) накопления электрической энергии, подключенное к указанному электрическому приводу (10).
3. Система по п.2, отличающаяся тем, что система (100) рекуперации энергии торможения содержит две идентичные электрические цепи (110, 120), в состав каждой из которых входит по меньшей мере одно устройство (112, 122) накопления электрической энергии, подключенное к указанному электрическому приводу (10).
4. Система по любому из пп.2, 3, отличающаяся тем, что каждая цепь (110, 120) содержит также переключатель (111, 121) с двумя состояниями, причем одно из двух состояний предназначено для подключения электрического привода (10) к устройству (112, 122) накопления энергии.
5. Система по п.3, отличающаяся тем, что блок (30) управления и контроля выполнен с возможностью управления цепью рекуперации энергии торможения до достижения максимального заряда указанного по меньшей мере одного устройства (112, 122) накопления энергии и управления цепью рассеяния энергии по достижении максимального заряда указанного по меньшей мере одного устройства (112, 122) накопления энергии.
6. Система по п.3, отличающаяся тем, что блок (30) управления и контроля выполнен с возможностью управления цепью двигателя, в которой происходит разряд накопленной энергии торможения до отбора электроэнергии из внешней сети (130) электропитания.
7. Система по п.3, отличающаяся тем, что блок (30) управления и контроля выполнен с возможностью управления цепью, в которой происходит рассеяние энергии торможения в электрическом приводе (10).
8. Система по любому из пп.2, 3, 5 и 6, отличающаяся тем, что устройство (112, 122) накопления энергии представляет собой конденсатор, суперконденсатор или ультраконденсатор.
9. Система по любому из пп.1-3, 5-7, отличающаяся тем, что электрическое устройство представляет собой реверсор (2) тяги.
10. Гондола, содержащая по меньшей мере одно электрическое устройство (2) и систему управления по любому из пп.1-9.
11. Способ управления, осуществляемый посредством системы управления по любому из пп.1-6 и содержащий этап, предусматривающий рекуперацию электроэнергии торможения от электрического привода (10) при перемещении подвижного элемента в закрытое положение и/или в развернутое положение.
12. Способ по п.11, отличающийся тем, что если устройство представляет собой реверсор (2) тяги, рекуперацию электроэнергии торможения от электрического привода осуществляют при перемещении подвижного элемента в закрытое положение в режиме прямой тяги указанного реверсора (2) тяги и/или в развернутое положение в режиме обратной тяги указанного реверсора (2) тяги.
| US2002157376A1, 31.10.2002 | |||
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
| Тяговый электропривод | 1984 |
|
SU1303455A1 |
| Электропривод | 1982 |
|
SU1040583A1 |
| FR2920201A1, 27.02.2009 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

