Область техники, к которой относится изобретение
Настоящее изобретение, в различных вариантах его осуществления, относится к беспроводному передающему устройству и беспроводной сети, содержащей множество таких передатчиков. Конкретные сценарии использования настоящего изобретения относятся к энергоэффективным измерительным узлам для приложений Интернета вещей (IoT, от англ. Internet-of-Things) и к сети IoT дальнего радиуса действия, которая содержит, помимо измерительных узлов, множество принимающих шлюзов; однако настоящее изобретение не ограничивается данными примерами использования. Настоящее изобретение применяет узкополосные радиоинтерфейсы со скачкообразным изменением частоты для обеспечения информационной емкости и устойчивости к помехам.
Уровень техники и раскрытие сущности изобретения
Для обеспечения подключаемости в приложениях IoT используется несколько конкурирующих энергоэффективных радиосетей. Локальные вычислительные сети, типа WiFi и Bluetooth, успешно использовались в некоторых приложениях, однако они требуют локальной инфраструктуры, подключенной к сети Интернет, которая не всегда доступна или желательна, поэтому они вряд ли применимы в отношении мобильных приложений, в которых сенсорные узлы могут выходить за пределы доступной полосы шлюза WiFi или Bluetooth. Также, для приложений IoT были предложены сети дальнего радиуса действия, а именно, сеть LoRa и сеть Sigfox. Эти сети имеют ряд недостатков.
1. Если, как часто бывает, сеть работает в нелицензированной полосе частот, принципиально важной является высокая помехоустойчивость.
2. Кроме того, необходимо обеспечить соответствие нормативам.
В сети LoRa реализуется внутриимпульсная линейная частотная модуляция с расширением спектра, при этом среди ее сильных сторон можно выделить: низкую сложность аппаратных средств, отсутствие необходимости в точных частотных эталонах или соблюдении временного графика, легкую синхронизацию и локализацию. Однако она имеет некоторые ограничения емкости для низких скоростей передачи данных.
В энергоэффективных сетях WAN, как правило, отдается предпочтение случайному доступу к среде, например, ALOHA для сенсорных узлов, при этом данное решение является наиболее энергосберегающим. Технология Sigfox и сверхузкополосные технологии, в целом, страдают от очень высокой частоты коллизий в сравнении с системной нагрузкой. В сверхузкополосной сети коллизии происходят по трем измерениям: времени, частоте и мощности. Время является типичной размерностью теории ALOHA. Частотные коллизии возникают из-за отсутствия сетки частот; локальные осцилляторы сенсорных узлов характеризуются гораздо меньшей точностью по сравнению с шириной полосы передачи, что приводит к удвоению частоты коллизий для одной и той же системной нагрузки. Фактор мощности означает, что крайний сенсорный узел или «слабый» узел при любой коллизии всегда будет «проигрывать». Кроме того, фазовый шум передатчика ограничивает уровень отклонений, достигаемый соседними пользователями.
В общем, при постоянном контроле параметра производительности самых слабых узлов, эти эффекты ограничивают системную нагрузку до 1% или менее. Такую ситуацию невозможно исправить посредством простого добавления дополнительных принимающих шлюзов.
В настоящем изобретении предложено новое передающее устройство и соответствующая беспроводная сеть, которые реализуют модифицированную форму сверхузкополосной модуляции и позволяют устранить или нивелировать упомянутые выше ограничения.
Согласно настоящему изобретению, данные задачи решены посредством объекта, раскрытого в прилагаемой формуле изобретения.
Краткое описание чертежей
Настоящее изобретение станет более понятным после изучения описания одного из вариантов его осуществления, приведенного в качестве примера и проиллюстрированного на чертежах, на которых изображено следующее.
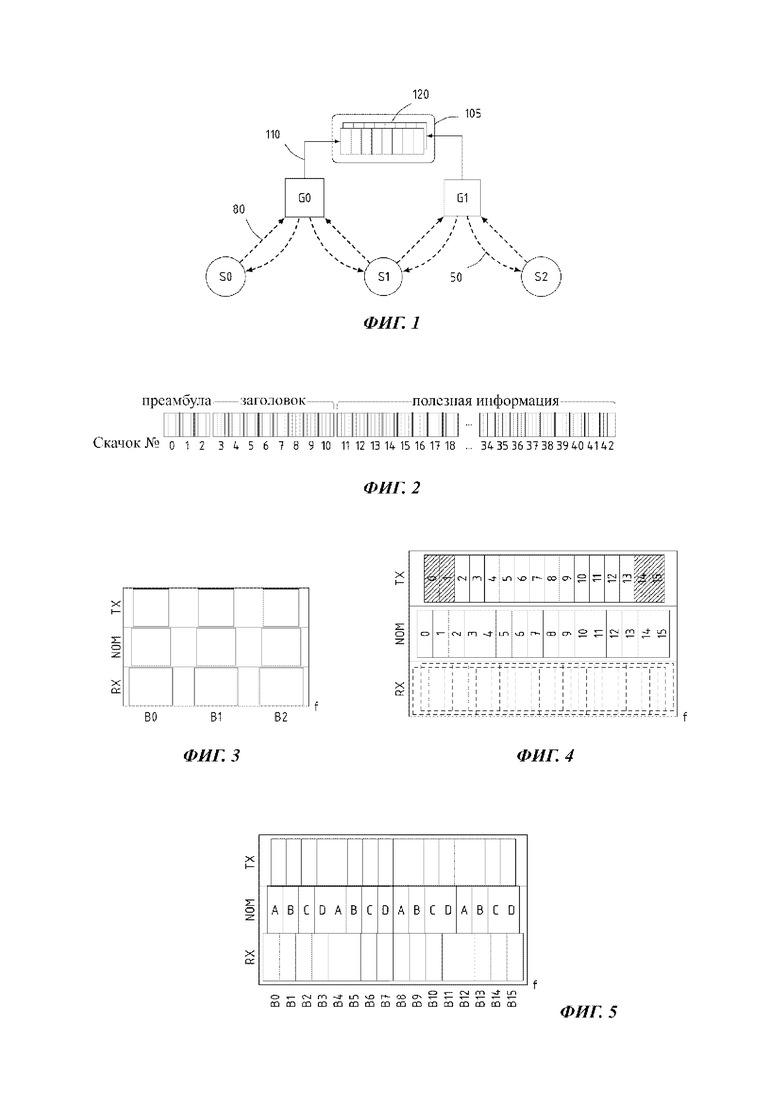
На фиг. 1 в упрощенном виде показана энергоэффективная сеть дальнего радиуса действия, содержащая сенсорные узлы и шлюзы, согласно настоящему изобретению.
На фиг. 2 схематично показан кадр данных, используемый передатчиками и приемниками согласно настоящему изобретению, причем указанный кадр данных содержит множество скачков частоты.
На фиг. 3 проиллюстрировано разделение полезного радиочастотного спектра на подполосы на сторонах передатчика и приемника.
На фиг. 4 показано возможное разделение подполосы в каналах.
На фиг. 5 показан график распределения частот со смежными подполосами.
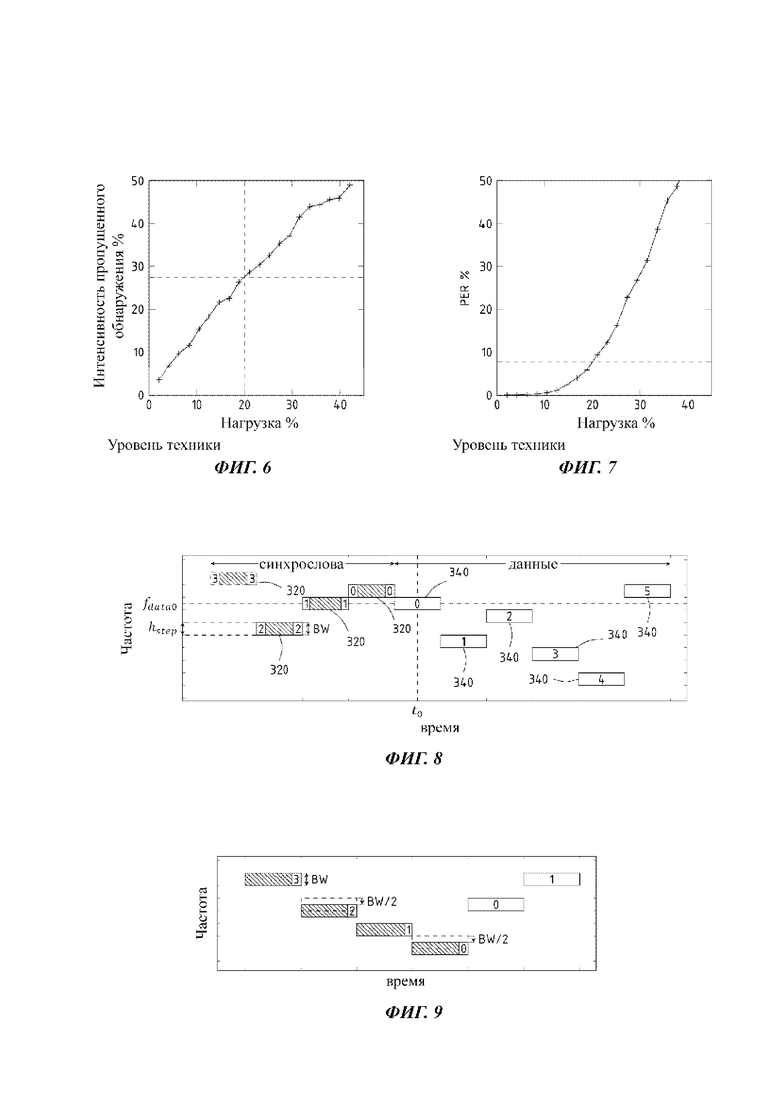
На фиг. 6 и 7 представлен график интенсивности пропущенного обнаружения в сети ALOHA, независимо от того, содержит ли она признаки настоящего изобретения, и коэффициента пакетных ошибок (PER, от англ. Packet Error Rate) в виде функций от сетевой нагрузки.
На фиг. 8 показана передача с расширением спектра преамбулы и секции данных, причем каждая из них разбита на множество скачков частоты.
На фиг. 9 показан вариант осуществления, в котором некоторые скачки частоты сдвинуты на некоторую долю номинального шага.
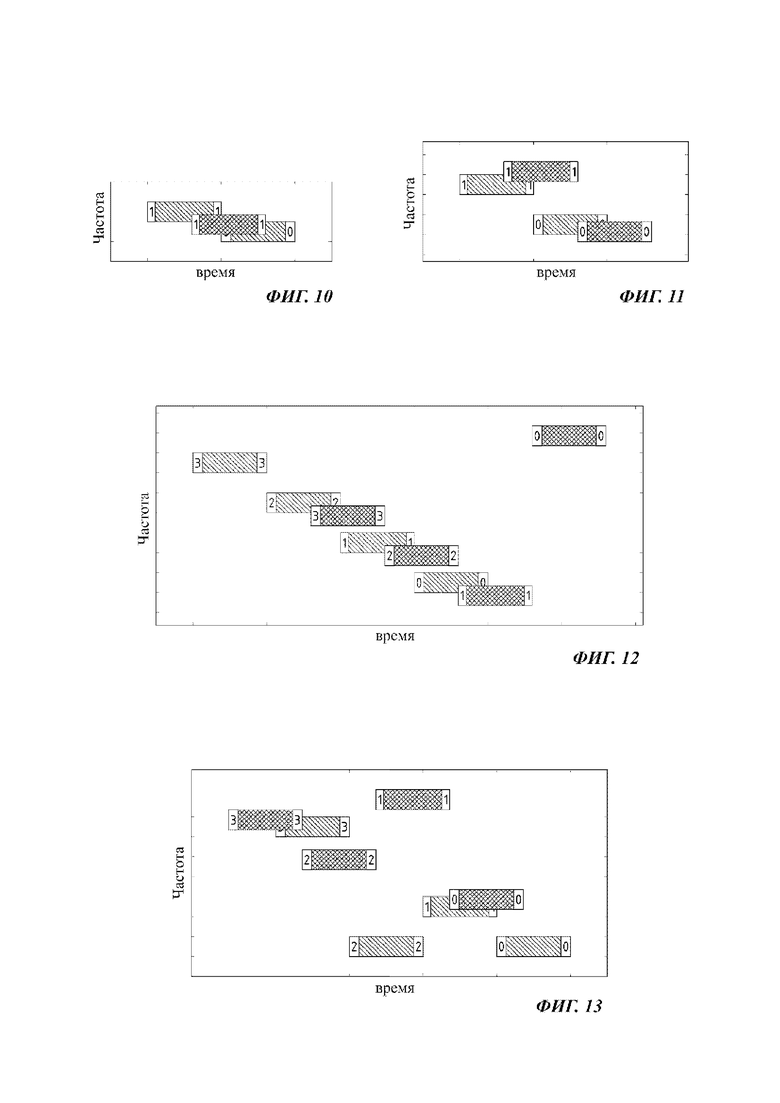
На фиг. 10-13 показаны повторяющиеся коллизии в преамбуле, при различных условных допущениях.
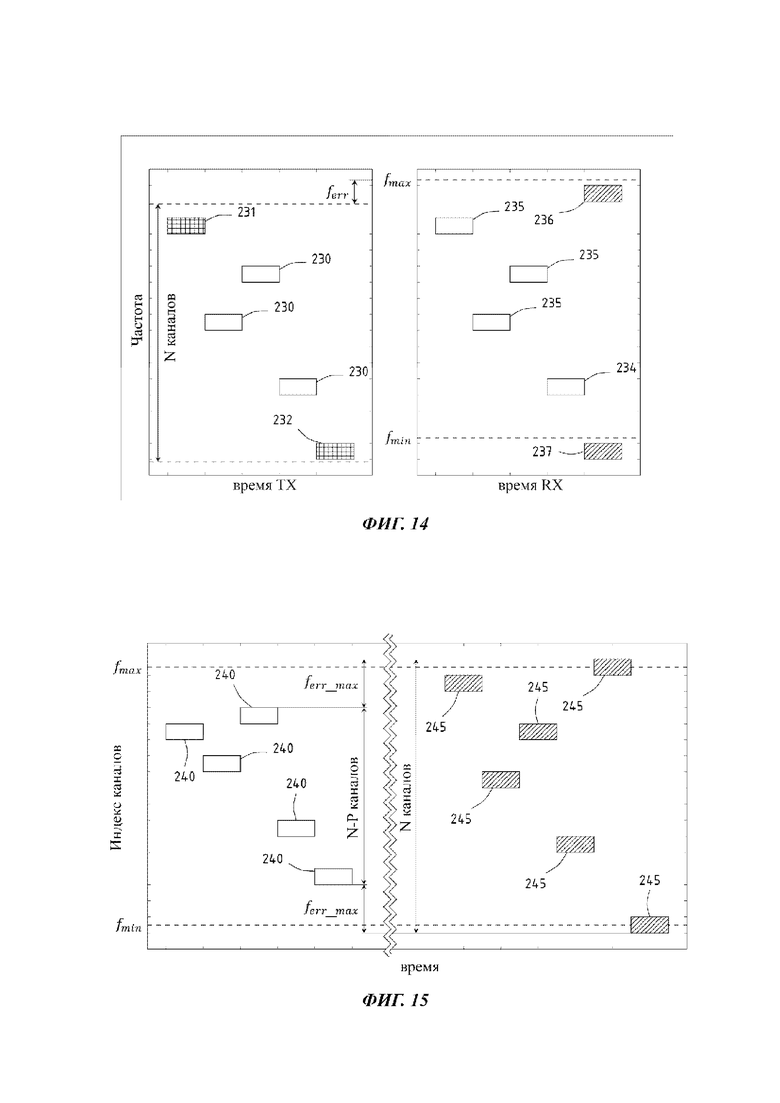
На фиг. 14 показан механизм компенсации частотной погрешности передатчика, при передаче с расширением спектра скачкообразным изменением частоты.
На фиг. 15 проиллюстрировано сравнение передачи со скачкообразным изменением частоты посредством узла с частотным эталоном низкого качества и передачи посредством узла со стабильным частотным эталоном.
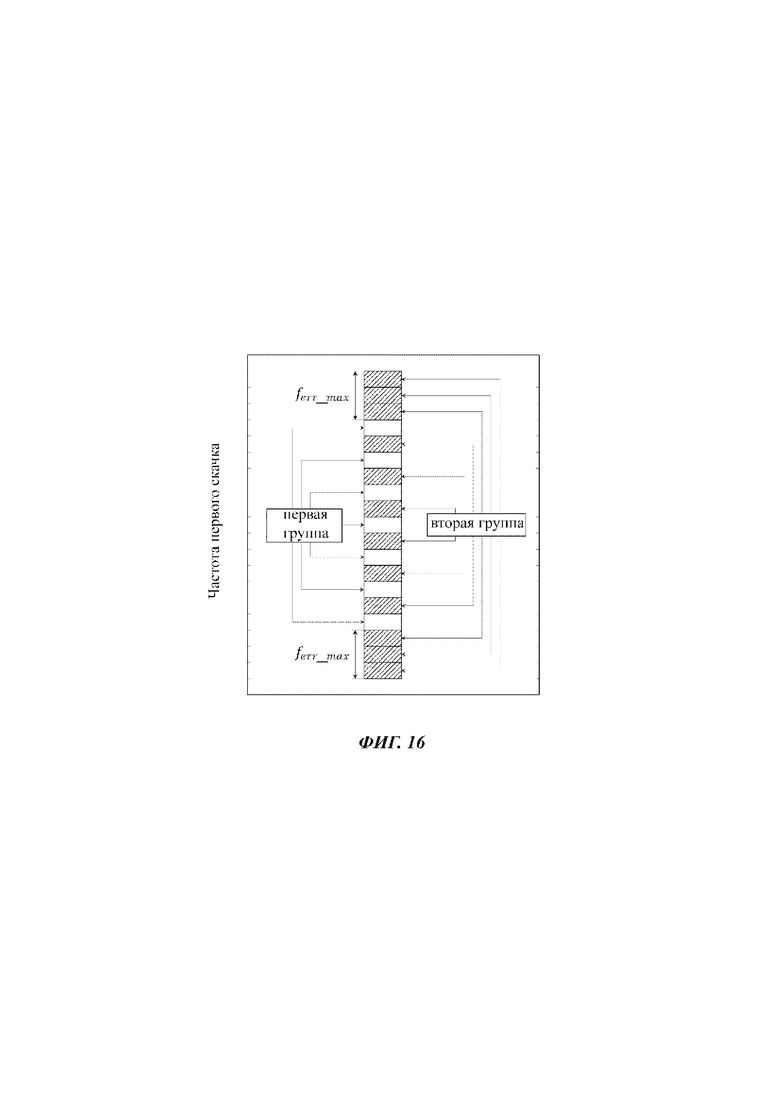
На фиг. 16 показан вариант осуществления, в котором последовательность скачкообразного изменения частот такого рода сигнализируется выбором первого скачка.
Осуществление изобретения
На фиг. 1, в упрощенном виде, показана энергоэффективная беспроводная сеть, которая содержит множество сенсорных узлов S0, S1, S2 и принимающих шлюзов G0, G1. В обычном приложении IoT, сенсорные узлы S0, S1, S2 представляют собой простые устройства с питанием от батареи, которые получают или вычисляют данные и загружают их (например, стрелка 80) в шлюзы G0, G1. Хотя это и не является обязательным, также может быть предусмотрен нисходящий трафик (например, стрелка 50) из шлюзов в узлы.
Количество сенсорных узлов не ограничено и может превышать несколько тысяч в условиях реального использования. Количество шлюзов также не ограничивается и обусловлено необходимостью охвата зоны, в которой находятся сенсорные узлы. Предпочтительно, сеть спроектирована так, что каждый датчик находится в принимающей полосе по меньшей мере одного шлюза или, предпочтительно, нескольких шлюзов.
Восходящие линии 80 связи между сенсорными узлами и шлюзами используют узкополосную или сверхузкополосную модуляцию и расширение спектра скачкообразным изменением частоты. Такая модуляция предпочтительно является формой модуляции когерентной фазы с постоянной огибающей, например, GMSK, MSK или PSK. Сигнализация предпочтительно является дифференциальной для учета изменений канала. Также предпочтительно, чтобы сообщение включало в себя коды исправления ошибок или обнаружения ошибок, и чтобы они были преобразованы в кадры данных, как показано на фиг. 2; при этом каждый из них содержит несколько скачков частоты, причем соседние слова в оригинальном сообщении предпочтительно чередуются с разнесенными сдвигами в кадре, так что они попадают в различные скачки, для увеличения устойчивости к кратковременным помехам.
Восходящая линия 80 связи от сенсорного узла к шлюзу предусматривает синтез модулированного радиосигнала, основанного на локальном частотном эталоне в сенсорном узле. Из соображений экономии и энергопотребления, сенсорные узлы могут быть не оснащены высококачественными осцилляторами. В этой связи, на частоту восходящего радиосигнала влияет существенная погрешность, которая может превышать - узкую - полосу частот сигнала.
Принимающие шлюзы, напротив, имеют значительно больше вычислительных ресурсов, чем сенсорные узлы, непрерывное питание, и точные временные эталоны, например, GPS-дисциплинированные часы. Они предпочтительно соединены между собой и могут работать совместно.
Нисходящая линия 50 связи, в случае ее наличия, может использовать тот же самый протокол модуляции, что и восходящие линии связи, или другой протокол. Для сохранения пропускной способности сети, нисходящая линия связи может быть широковещательной, для возможности ее приема всеми сенсорными узлами в пределах полосы шлюза; однако также возможна передача данных по двухточечной линии. Одна из функций нисходящих сообщений состоит в синхронизации временного эталона датчика с временным эталоном шлюзов, которая может быть предпочтительно обеспечена посредством, например, широковещательных пакетов LoRa.
В большинстве приложений IoT, сенсорные узлы имеют весьма ограниченную мощность и вычислительные ресурсы. Таким образом, целесообразным является случайный доступ к радиоканалам, то есть, когда бы сенсорному узлу ни потребовалось отправить сообщение, он отправляет его без сигнализации о своем намерении или без прослушивания того, свободен ли канал. Эти протоколы, также известные как протоколы ALOHA, чувствительны к таким коллизиям: функция протоколов ALOHA ограничена данными коллизиями.
Устройства и системы согласно настоящему изобретению используют скачкообразное изменение частот в качестве защиты от коллизий и других помех. Передатчики сенсорных узлов переключают несущую частоту между несколькими скачкообразно меняющимися частотами в имеющейся полосе радиочастот, согласно некоторой последовательности, так что передача по восходящей линии 80 включает в себя серию последовательных скачков с различными несущими частотами. Частота меняется на границе каждого скачка. Предпочтительно длина скачка гораздо меньше длины сообщения: сообщение или кадр состоит из одного или нескольких скачков.
Для обеспечения возможности демодуляции, последовательность скачкообразно меняющихся частот должна быть известна заранее или определяться алгоритмически принимающим шлюзом. Система может иметь только одну предварительно заданную последовательность скачкообразного изменения частот, и в этом случае, сообщения с различным временем начала не будут сталкиваться по частоте, так как их соответствующие последовательности скачкообразного изменения частот смещены по времени, или множество последовательностей скачкообразного изменения частот, среди которых передатчики могут выбирать. Последняя компоновка требует, чтобы принимающий шлюз имел информацию о последовательности скачкообразного изменения частот каждого отдельного сообщения.
На фиг. 2 показан восходящий кадр данных или сообщение, например, они могут использоваться в одном из вариантов осуществления настоящего изобретения. Кадр начинается с преамбулы, содержащей сигнал синхронизации, который предназначен для его обнаружения на стороне приемника, и физический заголовок. Физический заголовок содержит информацию, используемую в приемнике для прогнозирования и отслеживания последовательности скачкообразного изменения частот: если система предсказывает более одной возможной последовательности скачкообразно меняющихся частот, то преамбула предпочтительно содержит идентификатор последовательности, выбранный для данных, следующих в одном и том же кадре или сообщении. Предпочтительно, как будет видно из нижеследующего описания, физический заголовок содержит элемент информации, явный или неявный, об абсолютном значении частоты в первом скачке, или в одном определенном скачке. Такая информация используется принимающим шлюзом для устранения частотной погрешности передатчика.
Преамбула может также содержать другую информацию о формате данных, например, указание на скорость передачи данных, об используемой схеме модуляции, и т.д.
Для предотвращения потери преамбулы, информация предпочтительно повторяется несколько раз, в следующих один за другим скачках частоты. На фиг. 2 показана преамбула, содержащая три скачка, но данный признак не является обязательным для настоящего изобретения. Важно отметить, что каждая копия преамбулы также содержит счетчик или элемент информации, который позволяет принимающему шлюзу идентифицировать каждое повторение. Следовательно, даже если шлюз должен принять только одно повторение, он все равно может синхронизироваться с последовательностью скачкообразного изменения частот.
За преамбулой следует заголовок, который информирует принимающий шлюз о природе и формате следующей полезной информации. Важно отметить, что заголовок и полезная информация чередуются и кодируются для коррекции погрешностей. В данном примере, заголовок и полезная информация содержат восемь и, соответственно, 32 скачка, но эти числа могут варьироваться в зависимости от сценария использования. Каждый скачок содержит заданное количество символов модуляции и соответствующее количество битов модулированного сообщения.
Синхронизация с последовательностью скачкообразного изменения частот особенно сложно осуществима в системе согласно настоящему изобретению, поскольку частотные эталоны локальных осцилляторов сенсорных узлов имеют исходную погрешность, превышающую ширину полосы пропускания канала. Для приведения некоторых цифр, предположим, что сенсорные узлы S0-S2 оснащены низкокачественными кристальными осцилляторами с погрешностью 30 ч/млн, и что данные отмодулированы с шириной полосы 400 Гц в sub-GHz ISM-полосе; и тогда можно ожидать максимальную погрешность 30 кГц при задании несущей частоты. Это в 80 раз больше ширины полосы модуляции.
Возможны два подхода, которые состоят в следующем:
1. Перед передачей, синхронизировать эталон датчика с эталоном шлюза в нисходящей линии связи.
2. Скомпоновать последовательности скачкообразного изменения частот и доступные частоты так, чтобы можно было корректировать и компенсировать погрешности частотной синхронизации.
Подполосы и Формирование каналов
Предпочтительно, система делит имеющийся радиочастотный спектр на подполосы, которые могут прилегать друг к другу или могут быть отделены друг от друга, а каждую подполосу - на серию смежных каналов. Скачкообразное изменение может происходить в пределах некоторой подполосы или через подполосы. Любой заданный кадр передается по заданному каналу в некоторой подполосе и, поскольку частоты, синтезированные в сенсорном узле, не соотносятся непосредственно с частотами, измеренными по точному эталону, удобно задавать его частоту посредством одного индекса подполосы и одного индекса канала внутри подполосы, обозначенной индексом подполосы.
Использование нескольких подполос является целесообразным во многих отношениях.
1. Более широкое распространение в частотной области обеспечивает более успешную совместимость в нелицензированных полосах, как в качестве объекта воздействия, так и в качестве захватчика. При этом гораздо легче соблюдать нормативные пределы, которые, в свою очередь, могут обеспечить больше мощности и/или более продолжительные периоды передачи.
2. Более высокое разнесение против распространения/быстрого затухания.
3. Неявная сигнализация из положения первой скачкообразно меняющейся частоты: первая скачкообразно меняющаяся частота в последовательности скачкообразного изменения частот может быть выбрана среди множества возможных альтернативных начальных частот и, в соответствии сданным выбором, передатчик передает некоторый элемент информации.
4. Планирование сети и/или адаптивная скорость передачи данных.
Из-за несоответствия частот между приемником и передатчиком, полезно по-разному задавать эти полосы для приемника и передатчика. Следует ввести три понятия: понятие номинальной или регуляторной подполосы, понятие подполосы приемника и понятие подполосы передатчика.
Если передатчик имеет возможность выбора между несколькими возможными последовательностями скачкообразного изменения частот, то о выбранной последовательности может сигнализировать в неявном виде выбор первой использованной частоты.
Выбор последовательности скачкообразного изменения частот может быть основан на состоянии синхронизации частотного эталона передающего устройства.
На фиг. 3 представлено три определения подполосы. В данном примере, доступный радиочастотный спектр содержит три непересекающиеся подполосы: В0, В1 и В3 равной ширины и равномерно отстоящие друг от друга, в данном примере; но это не является обязательным признаком настоящего изобретения: количество, ширина и промежутки подполос являются произвольными и они могут соприкасаться или перекрываться в зависимости от варианта осуществления, они могут соответствовать регуляторной различимой области электромагнитного спектра, но это не обязательно. Номинальные подполосы (ряд NOM) представляют собой границы частоты, измеренные точным инструментом, в пределах которых должна происходить передача. Подполосы передачи (ТХ) выражены в единицах частоты, измеренной по частотному эталону передатчика, то есть, они смещаются при сдвиге локального осциллятора. Для соблюдения номинальных границ подполосы, сенсорный узел регулирует подполосы передатчика, уменьшая их так, что, даже с учетом частотных рассогласований, радиосигнал всегда попадает в номинальные пределы.
Важно отметить, что сенсорные узлы имеют состояние синхронизации, которое служит указанием на частотную погрешность локального осциллятора и адаптирует ширину и/или структуру подполос в зависимости от состояния синхронизации. При этом может быть разработано несколько стратегий, но основной принцип состоит в том, что чем выше частотная погрешность, обозначенная состоянием синхронизации, тем уже будет регулируемая подполоса.
Состояние синхронизации также может быть получено исходя из номинальной погрешности локального частотного эталона, на основании модели дрейфа, которая также может включать в себя температуру кристалла, на основании результата синхронизации, следующей за нисходящей связью, на основании времени, прошедшего с последней нисходящей связи, которая происходит за синхронизацией, или на основании комбинации всех или некоторых из этих элементов. Предпочтительно, состояние синхронизации является динамическим: заданный сенсорный узел может использовать большую часть доступной полосы сразу после синхронизации, и будет постепенно сужать свою подполосу передачи, в то время как частота его локального осциллятора становится все менее точной. Исходная ширина полосы пропускания может быть восстановлена в ходе дальнейшей синхронизации, инициированной посредством запроса узла или согласно предварительно заданному расписанию.
Часто, приемник представляет собой шлюз, который имеет доступ к GPS-синхронизированным часам. В данном случае, подполосы в приемнике (RX) могут быть по существу такими же, как и номинальные подполосы. В случаях когда приемник плохо синхронизирован (например, при узкополосной нисходящей передаче, или когда GPS синхронизация происходит неудачно), приемник может настроиться на более широкий набор частот, как показано на чертеже, благодаря чему он может принимать все переданные сигналы, которые фактически находятся в пределах номинальной подполосы.
Такое же разграничение между номинальными или регуляторными частотами приемника и передатчика приводится в плане каналов, как показано на фиг. 4. Одна номинальная подполоса согласно вышеприведенному определению может быть разделена на подходящее количество каналов (на чертеже показано уменьшенное количество). Такая же подполоса, согласно определению, используемому для передатчика, будет немного уже из-за раскрытой выше регулировки, и будет разделена на такое же количество каналов. Однако, вследствие рассогласования частот канал, заданный для передатчика, не соответствует точно номинальным частотам. Передатчик может исключить некоторые каналы, например, те, что близки к границе подполосы (затемненная зона на фиг. 4), для обеспечения того, чтобы все его передачи оказались в номинальной подполосе. Предпочтительно, все передатчики в сети используют одинаковый уменьшенный поднабор подходящих частот для ограничения сигнализации о выборе последовательности скачкообразного изменения частот.
В последовательности скачкообразного изменения частот, каждый скачок передается на разной несущей частоте, которая может быть обозначена индексом подполосы, и внутри подполосы, индексом канала. Предпочтительно, подполосы обозначены так, что соответствие между номиналами передатчика и приемника является однозначным, то есть, несущая частота, выбранная для передатчика (ТХ) в заданной подполосе, будет находиться в той же самой подполосе, что и для приемника, независимо от состояния синхронизации, поскольку промежутки между подполосами больше максимальной ожидаемой частотной погрешности. Тем не менее, такая ситуация не характерна для канала и соответствие между индексом канала, выбранным передатчиком, и фактической частотой, выявленной приемником, не является прямым.
Доступная полоса частот в данных вариантах осуществления может быть направлена во множество каналов передачи. Предпочтительно, каналы не перекрываются, но это требование не является абсолютным. Полоса частот может быть разбита на подполосы, каждая из которых содержит множество каналов, или в иных случаях все каналы могут содержаться в одном общем разделении. В целом, каждая скачкообразно меняющаяся частота может быть обозначена индексом канала и, возможно, индексом подполосы.
Передатчики согласно настоящему изобретению могут быть выполнены с возможностью определения последовательности скачкообразного изменения частот посредством постоянного наращивания канала исходной скачкообразно меняющейся частоты в соответствии с определенным порядком шагов наращивания, что позволяет получить некоторую последовательность каналов, причем каждый канал в последовательности задает скачок. Предпочтительно, за наращиванием следует операция по модулю для сохранения скачкообразно меняющихся частот внутри предварительно заданных пределов.
Таким образом, последовательность скачкообразного изменения частот определяется исходя из относительных интервалов, при этом передатчик может свободно выбирать исходную частоту. Поскольку частота (или эквивалентно канал) заданного скачка может быть выведена из частоты предыдущего скачка с помощью смещения или сдвига, после чего следует операция по модулю, последовательности задают только относительные частотные сдвиги или интервалы, связанные с каждым скачком, без ограничения первого канала, с которого начинается последовательность. Если на выходе операции сдвига получают некоторый канал, который находится за пределами границ его подполосы, операция по модулю переносит его внутрь подполосы.
При приеме, после обнаружения приемником сигнала с исходной частотой (или каналом) он может спрогнозировать скачкообразно меняющиеся частоты путем непрерывного наращивания исходной частоты в соответствии с известным порядком шагов наращивания и может последовательно настраиваться на скачкообразно меняющуюся частоту для приема всего сообщения.
Смещение не зависит от используемой частоты, но может зависеть от индекса скачка, например, оно может линейно увеличиваться или оно может вытекать из псевдослучайной последовательности или перестановки, известной или алгоритмически воспроизводимой в приемнике.
Неявная и явная сигнализация последовательности скачкообразного изменения частот
Сеть связи согласно настоящему изобретению может использовать одну общую последовательность скачкообразного изменения частот для всех передаваемых по восходящей линии связи сигналов или, предпочтительно, множество последовательностей скачкообразного изменения частот, среди которых сенсорный узел может выбирать. В случае наличия нескольких последовательностей скачкообразного изменения частот, последовательность каждого сообщения сигнализируется явным или неявным образом в физическом заголовке или преамбуле.
Последовательность скачкообразного изменения частот определяется индексом канала и индексом подполосы первого скачка и, при необходимости, индексом последовательности скачкообразного изменения частот. Сторона передатчика синтезирует радиосигнал, который имеет точно определенную частоту относительно его собственного временного эталона, но поскольку этот эталон имеет неопределенную погрешность, частота, принятая приемником, является неопределенной.
Принимающий шлюз может определить с уверенностью индекс подполосы первого скачка, поскольку подполосы являются по существу разделенными, а также он владеет информацией об индексе последовательности скачкообразного изменения, так как эта информация в явном виде указана в заголовке, но он не может определить с уверенностью индекс канала, выбранный передатчиком для первого скачка, и, следовательно, не может определить точно дальнейшее развитие последовательности скачкообразного изменения частот. Это особенно справедливо в тех случаях, когда частота находится рядом с границей подполосы.
Для решения данной проблемы, передатчик может иметь стабильный частотный эталон, например, ТСХО, и может синхронизировать свою частоту из нисходящего кадра или маячка. В данном случае, точность может быть выше половины или даже четверти ширины полосы модуляции. Благодаря этому появляется возможность задавать каналы, а последовательности скачкообразного изменения частот могут быть определены однозначно. Однако данное решение может оказаться непригодным в отношении технологии IoT, из-за ограничений по стоимости и мощности.
В другом возможном варианте осуществления, передатчик имеет менее стабильную частоту, например, низкокачественный ХО, но его погрешность по меньшей мере характеризуется и находится внутри известных пределов. Это может предусматривать синхронизацию частотного эталона передатчика с частотным эталоном шлюза, с помощью нисходящего кадра или маячка. В этом случае, погрешность может достигать 1 ч/млн, что соответствует примерно 1 кГц в ISM полосе 868 МГц или 915 МГц.
Для того чтобы приемник смог определить последовательность скачкообразно меняющихся частот, несмотря на частотную погрешность, передатчик отправляет дополнительную информацию о канале, используемом для первого скачка или для одного определенного скачка последовательности, например, первого скачка данных после преамбулы.
В простой схеме явной сигнализации, передатчик может содержать в преамбуле полное указание на канал или несущую частоту, используемую для первого скачка, или для последующих скачков в преамбуле. Исходя из этого, принимающий узел может измерить мгновенное частотное рассогласование между передатчиком и им самим, и определить последовательность скачкообразного изменения частот.
Однако сигнализация индекса канала целиком может оказаться бесполезной, поскольку частотная погрешность не является произвольно большой. Обычно принимающий шлюз может определить канал передачи с неопределенностью в несколько единиц от абсолютной частоты. Например, если максимальная частотная погрешность соответствует значению в ±1,5 ширины полосы модуляции, приемнику требуется только два бита информации для определения индекса канала. Преамбула содержит частичную информацию, например, два самых незначимых бита индекса канала, причем более значимые биты индекса канала определяются приемником на основании абсолютной несущей частоты. Предпочтительно, по меньшей мере значимый участок индекса канала, указывающий на первую скачкообразно меняющуюся частоту, сигнализируется, либо в явной форме, либо, как будет раскрыто далее, в неявной форме посредством выбора частоты первого скачка.
В одном из возможных вариантов осуществления настоящего изобретения, информация об исходном канале в явном виде не модулируется в преамбуле или в любом другом месте в сообщении, но о ней в неявном виде сигнализирует выбор частоты первого скачка. Если последовательность скачкообразного изменения частот определяется исходя из относительных интервалов, то передатчик может свободно выбрать частоту первого скачка, и, за счет этого выбора, в неявном виде сигнализировать о канале, выбранном для первого скачка в последовательности скачкообразного изменения частот. Со ссылкой на график распределения подполос с фиг. 3, например, 1,5 бита информации могут быть в неявном виде переданы при выборе В0, В1 или В2 для первого скачка. Условное обозначение может состоять в том, что В0 используется, если индекс частоты равняется 0 по модулю 3; В1, если он равняется 1; и В2, если он равняется 2. Поскольку подполоса может быть обнаружена однозначно, приемник способен мгновенно восстановить последовательность скачкообразного изменения частот.
На фиг. 5 проиллюстрирован график распределения частот, не разделенный на непересекающиеся подполосы. Это позволяет избежать наличия защитных полос между подполосами и максимально увеличить спектральную эффективность. Полоса частот разбита на смежные подполосы, сгруппированные в различные наборы, обозначенные как A/B/C/D, для создания групп непересекающихся подполос. Для этого, частотное расстояние между 2 подполосами одной и той же группы (на чертеже А-А, В-В, С-С или D-D) должно быть больше максимальной погрешности частоты передачи конечных точек.
Наличие непересекающихся подполос обеспечивает возможность применения неявной сигнализации частоты первого скачка. Группы могут быть использованы для планирования сети, причем заданный шлюз будет назначен заданной группе, в результате чего принятая подполоса не будет неоднозначной. В качестве альтернативы, группы могу быть использованы для разделения трафика на основании скорости передачи данных; и снова, индекс подполосы первого скачка не будет неоднозначным, поскольку скорость передачи данных указывается в заголовке кадра.
Независимо от применения неявной сигнализации, разделение полосы на группы подполос также может быть использовано для разделения восходящего трафика между пользователями, принимающими с высокой энергией, и пользователями, принимающими с низкой энергией, для защиты самых слабых пользователей. Из-за частотных погрешностей, все равно будут возникать некоторые коллизии на краях подполос, но меньше чем в случае с последовательностями скачкообразного изменения частот, заданными по всей полосе.
Предсказание коллизий и гашение
Поскольку система основана на скачкообразном изменении частот, и если последовательность скачкообразного изменения частот известна, приемники имеют возможность предсказывать, столкнутся ли и когда столкнутся два сообщения. Преамбула и участок синхронизации кадров не могут быть рассчитаны заранее, но данные могут быть пост-обработаны после некоторой короткой задержки. Поскольку кадры закодированы посредством помехоустойчивого кодирования (FEC, от англ. Forward Error Correction) и чередуются по всем скачкам, приемник должен дождаться последнего скачка перед устранением чередования и декодированием, после чего завершается процесс предотвращения коллизий и гашения кадра, представляющего интерес. Таким образом, процесс гашения не откладывает процесс декодирования.
В предпочтительном варианте, прогнозирование предусматривает построение, в принимающем шлюзе, карты помех, предсказывающей уровень принятого сигнала в виде функции от времени и частоты. На оси времени, разрешение карты или крупность разбиения предпочтительно равна или лучше длины символа и может иметь разрешение, равное одной выборке.
Принимающий шлюз, при обнаружении сигнала, определяет его последовательность скачкообразного изменения частот и заполняет элементы разрешения карты помех, соответствующей ожидаемому времени и частоте входящих пакетов с уровнем сигнала, измеренным на этапе обнаружения (один уровень энергии на каждый пакет).
Выражение «уровень сигнала» обозначает в данном описании любой подходящий индикатор интенсивности или мощности, в том числе, но не исключительно, измеренной мощности принятого сигнала, или RSSI, измеренного в дБмВт, в дБ*мкВ/м, или в любом подходящем масштабе или единицах.
Функционирование осуществляется следующим образом.
1. Приемник инстанцирует один демодулятор на каждый обнаруженный кадр. Демодуляторы создают логарифмические отношения правдоподобия (LLR, от англ. Log Likelihood Ratio) для каждого принятого бита и, возможно, какой-нибудь показатель качества типа RSSI, SNR и другие.
2. В ходе процесса обнаружения и инстанцирования демодуляторов, они обновляют карту помех путем добавления измеренной относительной мощности сигнала для представляющего интерес сигнала (RSSI). Такая карта помех показывает возможные перекрестные помехи всех узлов, которые осуществляют передачу в заданное время и должны иметь по меньшей мере временное разбиение одной длины символа и частотное разбиение, которое лучше ширины полосы модуляции.
3. После того как кадр достигает конца демодуляции, и перед устранением чередования и декодированием, отношениям LLR присваивается вес, после чего их по возможности гасят на основании карты помех: для каждого принятого бита, вычисляется отношение сигнал/шумовая помеха (SINR, от англ. Signal to Interference-Plus-Noise). Если карта помех показывает одновременную передачу во времени и частоте из двух узлов, отношениям LLR присваивается вес посредством поправочного коэффициента, обычно между единицей и нулем, для учета того факта, что в эти моменты времени и интервалы между частотами сигнал потенциально искажается помехами. Гашение сводится к присваиванию веса 0. Величина взвешивания или, возможно, общего гашения определяется на основании отношений сигнал/шумовая помеха (SINR).
Предпочтительно, принимающий шлюз выполнен с возможностью измерения уровня сигнала множества пакетов в последовательности скачкообразного изменения частот радиосигнала, которые не имеют помех; и, если уровень сигнала источника меняется во время приема, он может регулировать уровень сигнала ожидаемых пакетов в карте помех.
В другом предпочтительном варианте, принимающий шлюз должен также оценить помехи, исходящие от других систем, путем сравнения принятого сигнала с сигналами, спрогнозированными на основании карты помех.
Совместный прием
Сообщение, переданное от одного сенсорного узла, может быть принято более одним шлюзом и, в этом случае, несколько приемников могут совместно его декодировать. Со ссылкой на фиг. 1, сообщение, переданное из S1, принимается и G0, и G1. Для каждого кадра, принимающие шлюзы G0, G1 передают необходимую информацию в сервер 105 (который может находиться в отдельном месте, или в том же самом месте, что и один из шлюзов; отдельный фрагмент или аппаратное средство, или просто экземпляр компьютерной программы). Информация, загруженная (стрелка 110) на сервер, предпочтительно содержит взвешенные LLR, вычисленные ранее, а также время прибытия информации, информацию о скачкообразном изменении частот и другие метаданные, которые будут использованы для идентификации и обработки кадра. Предпочтительно, приемник может обеспечивать точную оценку предполагаемой частоты передачи данных. Это облегчает идентификацию кадров в сервере 105. Для этого может быть использована неявная сигнализация.
Множество синхрослов (преамбула со скачкообразным изменением) Сети ALOHA могут использовать специальную последовательность данных, условно обозначенную как «синхрослово», для идентификации начала передачи, или кадра данных. Синхрослова могут быть расположены в преамбуле или физическом заголовке кадра, и их структура по существу является известной приемнику для обеспечения возможности обнаружения и выравнивания слов.
Синхрослова и физический заголовок являются особенно важными, поскольку, в случае их неверного понимания, прием всех последующих данных происходит с нарушениями. На фиг. 6 показана ожидаемая частота появления ошибок при обнаружении синхрослов преамбулы, смоделированная для собственных помех системы в сети ALOHA с увеличивающейся нагрузкой, на основании предположения, что синхрослово теряется, если более 20% его длительности приходятся на помехи. Преамбула не защищена посредством FEC и чередования, что приводит к помехам на более высоком уровне, причем частота появления ошибок при 20% нагрузке составляет примерно 28%. Для сравнения, на фиг. 7 показан график прогнозируемой частоты появления ошибок (PER, от англ. Predicted Error Rate) для полезной информации в такой же сети, что показана на фиг. 6, при условии сверточного FEC (133, 171, k=7) и исходя из того, что 80% помех обнаруживается и гасится до декодирования, а 20% нет, причем данные допущения выполнимы для слабого узла. Видно, что PER при 20% нагрузке составляет примерно 8%.
В одном из вариантов осуществления, синхрослово, и возможно также физический заголовок, передаются в нескольких экземплярах с различной частотой, в соответствии с последовательностью скачкообразного изменения частот. Каждое повторение синхрослова объединяется с элементом информации об индексе скачкообразного изменения, например, счетчиком, который позволяет приемнику настраиваться под последовательность скачкообразного изменения частот. На фиг. 8 показан возможный вариант реализации такой групповой передачи заголовка. График демонстрирует восходящую передачу, которая включает в себя временную последовательность нескольких скачков, имеющих различные несущие частоты, и происходит на различных ординатах на графике. Каждый отдельный скачок, представленный посредством пустого или закрашенного прямоугольника, содержит сигнал, модулированный в узкой полосе частот.
Скачки 320 преамбулы содержат множество синхрослов, каждое из которых объединено по меньшей мере с одним индексом скачкообразного изменения частот, который в данном варианте осуществления повторяется в двух экземплярах в начале и конце каждого скачка. Данный признак не является существенным, и индекс может быть только в начале или в конце, или в середине, но, поскольку большинство помех ограничено коротким промежутком времени, эта дополнительная избыточность повышает надежность.
В одном из вариантов реализации, индексы скачкообразного изменения частот расположены в уменьшающейся в обратном порядке последовательности: скачок, обозначенный как «0», является последним среди скачков преамбулы. Такое расположение является гибким в том смысле, что принимающему шлюзу не надо знать, из скольких скачков состоит преамбула, количество синхрослов или частоту их повторения. Приемнику требуется только принять корректно один скачок для синхронизации и согласования с последовательностью скачкообразного изменения частот, с учетом частотной погрешности передатчика, и получить информацию о месте, в котором заканчивается синхрослово и начинаются данные. Например, даже если первое синхрослово (пунктирная линия) не было вообще отправлено, приемник все равно может синхронизироваться с любым из последующих синхрослов.
Количество и частота повторений синхрослова 320 необязательно являются фиксированными и могут динамично меняться передатчиком на основании условных коэффициентов. В предпочтительном варианте осуществления, передатчик адаптирует количество повторений синхрослова и/или частоту повторений синхрослова на основании состояния синхронизации, которое отражает частотную погрешность его локального частотного эталона.
В другом варианте осуществления, количество повторяющихся синхрослов и/или частота повторений синхрослова адаптируется передатчиком на основании оценки интенсивности успешных попыток передатчика. Интенсивность успешных попыток передатчика представляет собой вероятность того, что переданный сигнал корректным образом принимается шлюзом или шлюзами. Она зависит от нагрузки сети и от уровня принимаемого сигнала, видимого для шлюза. Интенсивность успешных попыток также зависит от количества синхрослов, как раскрыто выше: чем больше синхрослов, тем выше вероятность успеха. Зависимость от количества синхрослов является особенно острой, когда емкость системы ограничена ее собственным трафиком.
Передатчик может оценивать интенсивность успешных попыток различными способами. Точный способ оценки интенсивности успешных попыток основан на дроблении переданных кадров, которые должны быть подтверждены сетью и фактически являются подтвержденными. Менее точные способы, которые не требуют подтверждений, предусматривают оценку нагрузки на канал, посредством выборки канала только по уровню сигнала, или посредством попытки обнаружения синхрослов из других передатчиков и вычисления интенсивности успешных попыток на основании нагрузки канала.
В другом варианте осуществления, передатчик адаптирует количество повторений синхрослова и/или частоту повторений синхрослова на основании команды, принятой в сети. Инфраструктура сети, например, шлюз или сервер, может оценить интенсивность успешных попыток для заданного передатчика. Один из способов осуществления этого состоит во внедрении счетчика кадров, который увеличивается при каждой передаче, что позволяет напрямую контролировать интенсивность успешных попыток. Сеть также может статистически оценивать интенсивность успешных попыток заданного передатчика, когда он передает несколько кадров, на основании нагрузки системы, уровня принятого передатчиком сигнала, и уровней сигналов, принятых другими передатчиками. При этом сеть может найти оптимальное соотношение между производительностью / энергопотреблением / сетевой нагрузкой путем регулирования в индивидуальном порядке количества / частоты повторений синхрослова. Сеть может задавать различные классы услуг и проводить различную политику в отношении этих классов.
Скачки 340 данных пронумерованы на графике для их разграничения, однако необходимость в наличии явного индекса отсутствует. Приемник в этот момент уже определил их частоты и может их нормально демодулировать. Поскольку данные закодированы с использованием FEC и чередуются между собой, передача имеет высокий уровень защиты от помех. Обычно, последовательность скачкообразного изменения частот задана относительно центрального времени t_0 и центральной частоты f_data0 первого скачка данных. Однако, также возможны другие варианты выбора. Отличительным признаком настоящего изобретения является то, что и преамбула, и данные в кадре охватывает множество скачков частот.
Как раскрыто выше, последовательность скачкообразного изменения частот включает в себя группу несущих частот, сконцентрированных в неперекрывающихся каналах (фиг. 4). В одном из возможных вариантов, передающий узел выполнен с возможностью смещения несущей частоты некоторых скачков преамбулы на некоторую долю ширины полосы, как показано на фиг. 9. В данном варианте осуществления, четные синхрослова смещаются вниз на половину их ширины полосы. В целом, скачки частоты могут быть разделены частотными сдвигами, которые являются целыми или полуцелыми кратными ширины полосы, или кратными предварительно заданной доли ширины полосы.
Хотя кажется, что такой сдвиг увеличивает вероятность коллизии по частоте, по существу он является полезным, поскольку, в целом, центральные частоты каналов, используемых передатчиком, четко не заданы. Ширина полосы модуляции является низкой, примерно 100 Гц и, для обнаружения какого-либо синхрослова, приемник должен сформировать большое количество каналов, или увеличить их ширину полосы.
В результате сдвига, как показано на фиг. 9, приемник может сформировать меньше каналов или уменьшить их ширину полосы, но он по-прежнему способен обнаруживать по меньшей мере часть синхрослов с высокой вероятностью. Если половина синхрослов смещена на BW/2, то приемник уверен, что половина синхрослов будет иметь смещение менее BW/4. Таким образом, можно отказаться от некоторой надежности или производительности (может понадобиться больше повторений синхрослов) в пользу снижения сложности в приемнике.
Важно отметить, что последовательность целых и дробных шагов удовлетворяет детерминированному правилу, так что приемник может применить эти детерминированные дробные сдвиги в отношении номинальной последовательности скачкообразно меняющихся частот и сохранять исходную настройку, поскольку положение в последовательности смещенных слов является известным. Как уже отмечалось, в примере с фиг. 9, синхрослова с четным индексом смещаются вниз на BW/2. Для достижения данного результата также возможно использование других детерминированных правил.
Хотя для осуществления настоящего изобретения достаточно, чтобы синхрослова могли быть обнаружены и распознаны приемником, возможно применение известных технологий для выбора синхрослов с преимущественными свойствами, например, с резкой автокорреляцией. Среди этих вариантов выбора, настоящее изобретение может использовать одно и то же синхрослово во всех скачках 320 преамбулы, или также различные синхрослова для каждого скачка, в соответствии с предварительно заданной известной последовательностью. В последнем случае, приемник может определить положение скачка на основании индекса скачка и/или на основании самого синхрослова.
Скачки 320 преамбулы, помимо синхрослов, могут также передавать в приемник дополнительную информацию. Например, они могут включать в себя дополнительную информацию, отражающую скорость передачи данных для участка данных и/или индикатор, указывающий на конкретную последовательность скачкообразного изменения частот среди множества возможных последовательностей. Эти элементы информации могут быть закодированы любым подходящим способом.
Последовательности скачкообразного изменения частот
Как уже было изложено, частотные погрешности в передающих узлах затрудняют определение последовательности скачкообразного изменения частот. Предпочтительно, последовательность скачкообразного изменения частот для преамбулы со скачкообразным изменением, и возможно для начала участка данных, должна быть такой, чтобы ее можно было идентифицировать только по индексу и текущей частоте. Кроме того, поскольку переданная частота может демонстрировать погрешности выше в несколько раз, чем ширина полосы канала, на определение последовательности скачкообразного изменения частот не должно влиять такое смещение.
При условии непрерывного множества потенциальных частот, предпочтительный вариант заключается в том, что последовательность скачкообразного изменения частот определяется в виде относительных интервалов, при этом передатчик способен свободно выбирать исходную частоту. Как уже упоминалось выше, это значит, что в последовательности скачкообразного изменения частот частота заданного скачка может быть получена из частоты предыдущего скачка с помощью смещения, после чего следует операция по модулю, для сохранения ее в пределах предполагаемой полосы.
Что касается преамбулы со скачкообразным изменением, все частоты относятся к центральной частоте первого скачка данных, которая обозначается как f_data0. Эта частота должна находиться между пределами полосы или подполосы, обозначенными как f_min и f_max.
Минимальный шаг скачка обозначен как h_step. Для упрощения описания и чертежей, допускается, что h_step равняется ширине полосы модуляции BW (например, измеренной при срезе 6 дБ). Однако данное требование не является необходимым. Переданный сигнал будет (при срезе 6 дБ) находиться между f_min - bw/2 - f_error_max и f_max + bw/2+f_error_max.
Символом N обозначено количество каналов, доступных для скачкообразного изменения сточки зрения передатчика, N=floor (f_max -f_min)/(h_step+1).
С позиции приемника, общий набор центральных частот, которые следует отсканировать, охватывает от f_min - f_error_max до f_max + f_error_max, где f_error_max обозначает максимальную частотную погрешность для передатчика, которая является следствием погрешности его кварцевого осциллятора.
Для упрощения обозначений, величина f_data_0 принудительно задается так, чтобы f_data_0=f_idx_0*h_step+f_min, где f_idx_data_0 представляет собой целое число от 0 до N. При этом частота может быть просто признана целым числом. Необходимо только, чтобы разницы частот представляли собой целое число шагов h_step. Это можно отнести к общему случаю.
Если задано несколько последовательностей скачкообразного изменения частот, hop_seq_idz отмечается как идентификатор последовательности скачкообразного изменения частот. Далее, частота описывается в зависимости от индекса и hop_seq_idx. Следует помнить, что индекс представляет собой индекс преамбулы со скачкообразным изменением, который считается в обратном порядке.
1. Если index =0, то f_idx_preamb(index) = mod(f_idx_data_0 + hop_delta(0,hop_seq_idx), N+1).
2. Если index >0, то f_idx_preamb(index) = mod(f_idx_preamb(index-1) + hop_delta(index,hop_seq_idx), N+1).
Для сведения к минимуму повторяющихся коллизий, особенно в скачках преамбулы, следует выбирать последовательную hop_delta: если для двух передатчиков возникает коллизия на одном скачке преамбулы со скачкообразным изменением, то на других скачках для них должно быть как можно меньше коллизий. В идеальном случае, если происходит их коллизия на заданном скачке, они не должны сталкиваться на других скачках. Следующие свойства являются важными для обеспечения возможности ограничения многочисленных коллизий.
1. Необходимо избегать наличия дельт скачков, равных ±1. Алгебраически: для любого индекса и любого hop_seq_idx, необходимо сохранять неравенство abs(hop_delta(index,hop_seq_idx))>1. Это связано с тем, что центральные частоты заданы не точно из-за частотной погрешности, так что со сдвигом лишь на 1, коллизия может возникать на двух последовательных скачках, как показано на фиг.10. Точное правило, если BVW h_step, выглядит следующим образом:
abs(hop_delta(index,hop_seq_idx)) * h_step>BW + abs(hop_offset).
2. Значения hop_delta должны быть разными, иначе при возникновении одной коллизии обязательно произойдет несколько коллизий. Это показано на фиг. 12.
3. Разница между дельтами скачкообразного изменения частот должна составлять по меньшей мере 2, из-за частотных погрешностей. Это показано на фиг. 11 с дельтами скачкообразного изменения частот, равными 2 и 3.
4. Для любого индекса и любого hop_seq_idx, величина hop_delta (index,hop_seq_idx)) должна отличаться от любой суммы последовательных дельт скачков. Это показано на фиг. 13. Точное правило будет равняться сумме последовательных скачков плюс-минус 1, но согласно правилу 3 разницы кратны 2 в любом случае.
Для удовлетворения первых трех правил, последовательность hop_delta может просто представлять собой нечетные целые числа или четные целые числа. Для соблюдения также четвертого правила, при допущении, что максимальное количество синхрослов равняется 4 в пределах преамбулы со скачкообразным изменением, 4 различные последовательности могут иметь вид {2, 4, 8, 10}, {14, 16, 20, 22}, {-2, -4, -8, -10}, {-14, -16, -20, -22}.
Имитационные модели показали, что раскрытые выше правила существенным образом повышают вероятность корректного обнаружения преамбулы и восстановления последовательности скачкообразного изменения частот, несмотря на частотную погрешность в передатчике.
Различные варианты последовательностей скачкообразного изменения частот Псевдослучайные последовательности скачкообразного изменения частот обеспечивают улучшенное сопротивление к собственным помехам системы, предоставляя большее разнесение против коллизий. Предпочтительно, псевдослучайные последовательности скачкообразного изменения частот все равно являются взаимно-однозначными от одного скачка к другому: частота каждого скачка детерминированно выводится из частоты предыдущего скачка. Возможный, но не уникальный способ получения данного признака заключается в компоновке частот скачков в соответствии с детерминированной последовательностью перестановок.
Благодаря упомянутому выше взаимно однозначному соответствию, приемнику необходимо лишь обнаружить один скачок для самостоятельного восстановления последовательности скачкообразно меняющихся частот.
Проблема с основными псевдослучайными последовательностями состоит в том, что они требуют точных данных о канале. Для устранения данной проблемы имеется два возможных варианта.
Передатчик имеет стабильный частотный эталон, например, ТСХО, и синхронизирует свою частоту из нисходящего кадра или маячка. В данном случае точность может быть лучше половины или даже четверти ширины полосы модуляции. Благодаря этому имеется возможность задания каналов, при этом последовательности скачкообразного изменения частот определяются в соответствии с существующим уровнем техники.
Передатчик имеет менее стабильную частоту, но он синхронизирует свою частоту из нисходящего кадра или маячка. В данном случае, погрешность может достигать 1 ч/млн, что оставляет менее 1 кГц в ISM полосе 868 МГц или 915 МГц. Кроме того, в качестве вспомогательной информации, как раскрыто здесь в отношении преамбулы со скачкообразным изменением или с использованием другого способа, передатчик может сигнализировать о частоте, с которой он намерен осуществить свою передачу. Таким образом, приемник владеет данными о частотной погрешности передатчика и может вывести последовательность скачкообразного изменения частот. Благодаря ограниченной частотной погрешности, только 2 или 3 бита оказываются достаточными в качестве дополнительной информации: погрешность меньше ±1,5 каналов, при этом важным является значение mod(f_idx_preamb, 4). Значение hop_offset можно регулировать так, чтобы максимальная частотная погрешность в данном случае сводилась к ±1,5 каналам, или другим значениям для ограничения требуемой вспомогательной информации.
Предпочтительно, последовательность скачкообразного изменения частот однозначным образом может быть выведена из номинальной несущей частоты или индекса канала ее первого скачка или, эквивалентно, одного скачка в определенном положении в преамбуле обнаружения, по возможности с использованием дополнительной вспомогательной информации, несмотря на частотную погрешность, которая может в несколько раз превышать ширину полосы канала.
Для решения данной проблемы, настоящее изобретение основывается на последовательностях скачкообразного изменения частот, определяемых в виде относительных сдвигов, за которыми следует операция по модулю. Для некоторых скачков, частота которых близка к границе полосы или подполосы, принимающий шлюз может быть неспособен к получению данных о том, оценил ли передатчик то, выходят или нет они за пределы полосы, или то, была ли применена операция по модулю. Другими словами, имеется неоднозначность между индексом к канала и индексом k+N канала. Данный случай проиллюстрирован на фиг. 14. Два графика демонстрируют одну и ту же последовательность скачкообразного изменения частот, переданную посредством передающего узла и принятую шлюзом. Ось частот относится к оси времени шлюза, и условно считается точной, причем принятые скачки выровнены в горизонтальном направлении с переданными скачками.
На самом деле, передающий узел будет синтезировать частоты на основании своего собственного частотного эталона, на который влияет погрешность f_err и, в зависимости от этой неизвестной величины, он может оказаться не в состоянии применить операцию по модулю к скачку 232, или, если погрешность будет обратной по знаку, применить ее к скачку 231. Таким образом, существует неоднозначность в том, что некоторые скачкообразно меняющиеся частоты могут быть синтезированы на двух отдельных частотах в зависимости от того, было ли наращивание, которое привело к частоте, оценено передатчиком как выходящее за пределы подполосы.
Для того чтобы справиться с этой неоднозначностью, приемник может открыть второй прослушивающий канал для скачков, которые, как предполагается, будут находиться рядом с границей. Например, если в отношении скачка 234 применяется заданное смещение, принимающий шлюз выявляет, что следующий скачок 237 будет выходить за f_min, и в этом случае он должен применить операцию по модулю и перехватить следующий скачок в положении, обозначенном номером позиции 236. Тем не менее, шлюз открывает второй приемник в развернутом положении 237. В результате, какой-либо из приемников будет настроен корректно. В альтернативном варианте, передатчик может отказаться передавать скачки типа 231 и 232, которые ближе, чем f_err_max, к границе.
В одном из вариантов осуществления, последовательности скачкообразного изменения частот создаются перестановкой на каждом скачке. Каждая скачкообразно меняющаяся частота может быть выведена из предыдущей частоты в последовательности скачкообразного изменения частот (как правило, непосредственно предшествующей ей) посредством перестановочной операции. В этой связи, имеется одна перестановка на каждую начальную частоту. При этом для каждого скачка должна быть предусмотрена другая перестановка, иначе будет создана только одна последовательность.
Предпочтительно, сенсорный узел неявным образом сигнализирует о последовательности скачкообразного изменения частот посредством начальной частоты (которая также именуется частотой первого скачка данных, или опорной частотой). Последовательность имеет следующий вид, также описанный итеративно.
Если index =0, то f_idx_data (index) = f_idx_data_0,
если index >0, то f_idx_data (index, hop_seq_idx) = hopping_perm[hop_seq_idx] (f_idx_data(index-1)),
где hopping_perm[hop_seq_idx] представляет собой перестановку (0, N-1), предпочтительно на цикл меньше.
Повышение производительности сопряжено с некоторыми издержками: приемник должен знать точную предполагаемую частоту первого скачка, для выведения последовательности. Как уже было раскрыто выше, она может быть получена посредством стабильного частотного эталона в передатчике, или за счет неявной или явной сигнализации абсолютной частоты любого скачка, предпочтительно первого скачка, синтезированного на основании собственного частотного эталона передатчика.
Величина абсолютной частоты может быть указана неявно, через выбор первой подполосы, использованной при передаче, поскольку процесс определения подполосы никогда не бывает неоднозначным и предоставляет пределы, внутри которых частотные эталоны в мобильных узлах могут отклоняться, или любым другим подходящим способом.
Последовательности скачкообразного изменения частот для случая с подполосами
Если доступная частота разделена на подполосы, переданная последовательность скачкообразного изменения частот может быть обозначена как последовательность подполос, которые накладываются в иерархическом порядке на последовательность каналов. Каждый скачок передается в различных подполосах и в различных каналах, согласно соответствующим последовательностям.
Для облегчения системы обозначений, предполагается, что все подполосы имеют одинаковое количество каналов, равное N+1. Это позволяет сохранить терминологию в случае с единственной полосой для обозначения использованной частоты в пределах подполосы.
Индекс подполосы обозначен как sb_idx_data, он зависит от индекса номера скачка и номера последовательности скачкообразного изменения частот hop_seq_idx. Для заданного номера последовательности скачкообразного изменения частот, последовательность скачкообразного изменения частот зависит только от sb_idx_data_0 и f_idx_data_0, то есть, частоты первого скачка.
Последовательность скачкообразного изменения частот при этом задается как наборы sb_idx_data (index, hop_seq_idx, sb_idx_data_0, f_idx_data_0) и f_idx_data (index, hop_seq_idx, sb_idx_data_0, f_idx_data_0).
Организация доступных частот в виде непересекающихся подполос обеспечивает преимущества, которые не зависят от последовательностей скачкообразного изменения частот: улучшенное разнесение против многолучевого распространения, лучшее подавление помех, повышенная совместимость и, как следствие, лучшее согласование с нормативами.
Если подполосы являются непересекающимися, одно из преимуществ состоит в том, что подполоса первого скачка известна приемнику однозначно, даже при наличии частотного смещения от сенсорного узла. Возможно использование sb_idx_data_0 для сигнализации, как о последовательности скачкообразного изменения частот, так и о вспомогательной информации типа LBS для f_idx_data_0.
Например, при наличии 40 подполос, 2 бита могут сигнализировать о LBS для f_idx_data_0, при этом 10 последовательностей скачкообразного изменения частот могут быть сигнализированы с помощью sb_idx_data_0. Очевидно, что большее количество последовательностей скачкообразного изменения частот также могут быть неявно сигнализированы с помощью f_idx_data_0. Кроме того, возможна сигнализация только о последовательностях скачкообразного изменения частот через sb_idx_data_0, при этом частотная погрешность остается неизвестной, однако в этом случае приемник должен будет открыть дублируемые окна приема (дублируемые по частоте) на краях полосы, как на фиг. 14.
Для несинхронизированных узлов, пространство для f_idx_data уменьшено для обеспечения того, чтобы передачи всегда происходили в авторизованной полосе. Сигнализация LSB способствует лишь обеспечению улучшенных последовательностей скачкообразного изменения частот.
Имитационные модели демонстрируют конкретное преимущество использования подполос в сравнении с единственной полосой в случае, когда синхронизация частоты является неточной. Если допустить, что используется единственный набор скачкообразного изменения частот (последовательность скачкообразного изменения частот определяется только посредством первого скачка), подавление помех несколько лучше в случае с подполосами. Однако при использовании нескольких наборов преимущество ослабевает, поскольку все системы близки к завершению случайных последовательностей, которые являются оптимальными для подавления помех.
Последовательности скачкообразного изменения частот для случая с подполосами с отличной частотной синхронизацией
Данный случай предполагает, что все сенсорные узлы имеют частотную синхронизацию, которая лучше % ширины полосы модуляции, так что отсутствует неоднозначность в предполагаемой частоте.
Здесь, частота первого скачка, заданная посредством пары (f_idx_data_0, sb_idx_data_0), снова используется для индексации последовательности скачкообразного изменения частот, потенциально с другой индексацией. Они известны однозначно.
Это та часть уровня техники, которая используется для создания псевдослучайных последовательностей, зависящих от f_idx_data_0, sb_idx_data_0, hop_seq_idx. При этом следует предусмотреть одну для индекса подполосы, и одну для индекса частоты. В одном из примеров используются генераторы псевдослучайной двоичной последовательности, размер состояния которых выше или равен общему количеству битов, необходимых для отображения f_idx_data_0, sb_idx_data_0, index, hop_seq_idx.
Последовательности скачкообразного изменения частот в случае с подполосами со смешанными возможностями частотной синхронизации
Данный случай является более реалистичным, поскольку не все сенсорные узлы оснащены качественными временными/частотными эталонами. Даже в случае предварительной синхронизации, сенсорные узлы могут демонстрировать существенные частотные сдвиги, поскольку маячки/кадры синхронизации не очень часто встречаются в LPWAN.
Кроме того, необходимо обеспечить совместное использование двух популяций. Предпочтительно, предоставить лучше синхронизированным узлам увеличенное пространство для скачкообразного изменения частот. Очевидно, также можно уменьшить пространство для всех узлов, так чтобы они получили одинаковое пространство.
На фиг. 15 проиллюстрирована возможная компоновка согласно настоящему изобретению. Частота первого скачка для слабо синхронизированных узлов ограничена и не допускается ее приближение к пределам полосы на f_err_max. Передающий узел снова сигнализирует о точной частоте через первую используемую подполосу. Слабо синхронизированные узлы могут использовать только N-P средние каналы (скачки 240), а хорошо синхронизированные узлы могут использовать любой из N доступных каналов (скачки 245). Следует отметить, что для каждого скачка индекс подполосы меняется, но при этом используется стандартная псевдослучайная последовательность скачкообразного изменения частот.
Сигнализация о том, какой набор скачкообразного изменения частот используется, также связана с первым частотным индексом. Некоторые частоты в центре могут сигнализировать о последовательностях скачкообразного изменения частот по всему размаху. Набор частот должен быть разделен на 2 непересекающиеся группы, как показано на фиг. 16. Первая группа, имеющая только частоты в центре, для обеспечения первого скачка слабо синхронизированного узла находится в пределах допустимых границ, а вторая группа расположена в остальной части. Относительные размеры групп должны зависеть от доли слабо синхронизированных узлов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОЖЕСТВО СОВМЕСТИМЫХ OFDM-СИСТЕМ С РАЗЛИЧНЫМИ ПОЛОСАМИ ПРОПУСКАНИЯ | 2008 |
|
RU2470472C2 |
| ПЕРЕДАТЧИК ДАННЫХ И ПРИЕМНИК ДАННЫХ С НИЗКИМ ЗНАЧЕНИЕМ ЗАДЕРЖКИ ДЛЯ ПРОЦЕССА ПЕРЕДАЧИ С РАЗДЕЛЕНИЕМ ТЕЛЕГРАММ | 2018 |
|
RU2758452C1 |
| ОПТИМИЗИРОВАННОЕ СОЧЕТАНИЕ ПРЕАМБУЛЫ И ПОЛЕЙ ДАННЫХ ДЛЯ СЕТЕЙ ДАТЧИКОВ, ИМЕЮЩИХ НИЗКОЕ ПОТРЕБЛЕНИЕ ЭЛЕКТРИЧЕСТВА, НА ОСНОВЕ СПОСОБА РАЗДЕЛЕНИЯ ТЕЛЕГРАММ | 2017 |
|
RU2750043C2 |
| СХЕМА МНОЖЕСТВЕННОГО ДОСТУПА И СТРУКТУРА СИГНАЛА ДЛЯ D2D КОММУНИКАЦИЙ | 2013 |
|
RU2643702C1 |
| СХЕМА ПРЕАМБУЛЫ ДЛЯ БЕСПРОВОДНОГО СИГНАЛА | 2012 |
|
RU2509452C2 |
| ОПТИМИЗИРОВАННЫЕ ШАБЛОНЫ СКАЧКООБРАЗНОГО ИЗМЕНЕНИЯ ДЛЯ РАЗНЫХ СЕНСОРНЫХ УЗЛОВ И ПЕРЕМЕННЫХ ДЛИН ДАННЫХ НА ОСНОВЕ СПОСОБА ПЕРЕДАЧИ С РАЗБИЕНИЕМ ТЕЛЕГРАММЫ | 2017 |
|
RU2749846C2 |
| СИСТЕМА И СПОСОБ ПЕРЕДАЧИ ДАННЫХ В ШИРОКОПОЛОСНОЙ БЕСПРОВОДНОЙ СИСТЕМЕ ДОСТУПА, ИСПОЛЬЗУЮЩИЕ АМС ПОЛОСЫ | 2005 |
|
RU2328080C1 |
| СОВМЕСТНОЕ ИСПОЛЬЗОВАНИЕ КВАНТОВ ВРЕМЕНИ В КАНАЛЕ ДОСТУПА | 1998 |
|
RU2214687C2 |
| ШАБЛОНЫ СКАЧКООБРАЗНОГО ИЗМЕНЕНИЯ ЧАСТОТЫ УЗКОПОЛОСНОГО ФИЗИЧЕСКОГО КАНАЛА ПРОИЗВОЛЬНОГО ДОСТУПА И СХЕМЫ ОБНАРУЖЕНИЯ | 2016 |
|
RU2711872C1 |
| СХЕМА ПРЕАМБУЛЫ ДЛЯ БЕСПРОВОДНОГО СИГНАЛА | 2008 |
|
RU2458485C2 |
Изобретение относится к беспроводной сети с расширением спектра и скачкообразным изменением частот для приложений IoТ. Технический результат состоит в повышении качетва связи за счет обнаружения и синхронизации сигналов, несмотря на неустранимые рассогласования частот и коллизии. Для этого сеть содержит мобильные устройства с несинхронизированными локальными часами, которые передают, в том числе, на участке преамбулы, множество синхрослов, каждое из которых объединено по меньшей мере с одним образцом последовательного индекса. Скачкообразно меняющиеся частоты, на которых передаются синхрослова, отличаются друг от друга. 3 н. и 8 з.п. ф-лы, 16 ил.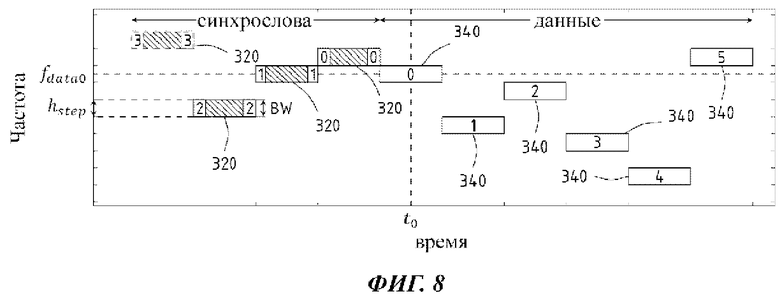
1. Радиопередающее устройство, содержащее радиоинтерфейс, функционирующий в предварительно заданной полосе частот, и функционально выполненное с возможностью модуляции несущей, имеющей некоторую частоту в полосе частот, при переключении частоты несущей между несколькими скачкообразно меняющимися частотами в полосе частот, в соответствии с последовательностью скачкообразного изменения частот, для получения модулированного сигнала с расширением спектра, причем модулированный с расширением спектра сигнал содержит на участке преамбулы множество синхрослов, каждое из которых объединено по меньшей мере с одним образцом последовательного индекса, причем предусмотрена передача синхрослов на различных частотах, и участок данных, который следует за участком преамбулы и содержит множество скачков частоты, при этом последовательные индексы расположены в обратном порядке.
2. Радиопередающее устройство по п. 1, в котором предусмотрена возможность детерминированного выведения каждой скачкообразно меняющейся частоты в последовательности скачкообразного изменения частот из частоты непосредственно предшествующего скачка в последовательности скачкообразного изменения частот, например, посредством перестановочной операции.
3. Радиопередающее устройство по п. 1, в котором скачки частоты в преамбуле содержат синхрослово между двумя экземплярами последовательного индекса.
4. Радиопередающее устройство по п. 1, в котором скачки частоты в преамбуле содержат дополнительную информацию, указывающую на скорость передачи данных для участка данных, и/или индикатор, обозначающий последовательность скачкообразного изменения частот среди множества возможных последовательностей скачкообразного изменения частот.
5. Радиопередающее устройство по п. 1, в котором синхрослова являются одинаковыми или разными.
6. Радиопередающее устройство по п. 1, в котором модулированный сигнал внутри каждого скачка частоты имеет некоторую ширину полосы, причем часть скачков частоты смещена на частотный сдвиг, который составляет половину или предварительно заданную долю указанной ширины полосы, причем последовательность целых и дробных шагов является детерминированной.
7. Радиопередающее устройство по п. 1, содержащее локальный частотный эталон и функционально выполненное с возможностью получения состояния синхронизации, отражающего частотную погрешность локального частотного эталона, и регулирования количества повторений синхрослова и/или частоты повторений синхрослова на основании состояния синхронизации.
8. Радиопередающее устройство по п. 7, функционально выполненное с возможностью получения оценки интенсивности успешных попыток передачи и регулирования количества повторений синхрослова и/или частоты повторений синхрослова на основании оценки интенсивности успешных попыток передачи.
9. Радиопередающее устройство по п. 8, функционально выполненное с возможностью регулирования количества повторений синхрослова и/или частоты повторений синхрослова после приема команды.
10. Сеть связи, включающая множество радиопередающих устройств по п. 1, которая содержит по меньшей мере один приемник, причем приемник выполнен с возможностью обнаружения в модулированном сигнале синхрослова и сопряженного последовательного индекса, для определения последовательности скачкообразного изменения частот и согласования с последовательностью скачкообразного изменения частот на основании синхрослова и последовательного индекса, для определения с помощью последовательного индекса положения участка данных, и для демодуляции участка данных.
11. Радиоприемное устройство, содержащее радиоинтерфейс, функционирующий в предварительно заданной полосе частот, и функционально выполненное с возможностью демодуляции несущей, имеющей некоторую частоту в полосе частот, причем предусмотрена возможность перескока частоты несущей между несколькими скачкообразно меняющимися частотами в полосе частот, в соответствии с последовательностью скачкообразного изменения частот, и получения демодулированного сигнала, содержащего на участке преамбулы множество синхрослов, каждое из которых объединено по меньшей мере с одним образцом последовательного индекса, причем предусмотрена возможность передачи синхрослов на различных частотах, и участок данных, следующий за участком преамбулы и содержащий множество скачков частот, и с возможностью определения с помощью указанного последовательного индекса положения участка данных, при этом последовательные индексы расположены в обратном порядке.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| СИСТЕМА СВЯЗИ СО СКАЧКООБРАЗНЫМ ИЗМЕНЕНИЕМ ЧАСТОТЫ | 1999 |
|
RU2168280C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

