ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к сенсорному устройству ввода, транспортному средству с сенсорным устройством ввода и способу изготовления сенсорного устройства ввода, и, более конкретно, к сенсорному устройству ввода, способному вводить сигнал касания, транспортному средству с сенсорным устройством ввода и способу изготовления сенсорного устройства ввода.
УРОВЕНЬ ТЕХНИКИ
В общем, с развитием технологии электронной связи разрабатываются различные электронные устройства, и в этих электронных устройствах все большее значение придается яркости дизайна и удобству работы пользователя. В этой тенденции особое значение придается диверсификации устройств ввода, представленных клавиатурами или клавишными панелями.
Устройства ввода используются в системах отображения различных типов, которые обеспечивают пользователей информацией, таких как портативные терминалы, портативные компьютеры, смартфоны, умные планшеты, умные телевизоры и т.п. С недавнего времени, в связи с развитием электронных устройств, дополнительно к способу ввода с использованием кнопки управления, наборного диска или подобного, используется способ ввода управляющего сигнала с использованием касания.
Сенсорное устройство ввода, которое является одним из устройств ввода, образующих интерфейс между устройствами передачи информации, использующими различные устройства отображения, и пользователем, обеспечивает интерфейс между устройством передачи информации и пользователем за счет обеспечения пользователю возможности непосредственно касаться сенсорной площадки или сенсорного экрана или приближаться к ним с использованием пальца или средства ввода, такого как стилус для сенсорного экрана.
Сенсорное устройство ввода используется различными устройствами, такими как банкомат (ATM), персональный цифровой помощник (PDA) и мобильный телефон, поскольку сенсорное устройство ввода может быть легко использовано лицами любого возраста за счет всего лишь касания пальцем или средством ввода, таким как стилус для сенсорного экрана. Оно также широко используется во многих областях, например, в банках, в государственных учреждениях, при осмотре достопримечательностей и для обеспечения информации о движении транспорта.
В последнее время были предприняты усилия по применению сенсорных устройств ввода в изделиях для охраны здоровья или медицинских изделиях и в транспортных средствах. В частности, растет применение сенсорной панели, поскольку она может использоваться вместе с сенсорным экраном или может использоваться независимо в системе отображения. В последнее время дополнительно к функции перемещения точки с использованием касания была разработана функция ввода жеста. В случае сенсорного устройства ввода, способного вводить жест, продолжаются работы по улучшению скорости распознавания жеста.
В качестве способа реализации сенсорного устройства ввода, способного работать под сенсорным управлением, используют способ на основе сопротивления, способ на основе электростатической емкости, способ на основе поверхностного ультразвука и способ на основе передатчика. Среди них, в качестве сенсорного устройства ввода, использующего способ на основе электростатической емкости, существует тип, в котором в некотором направлении образованы электродные рисунки, пересекающие друг от друга, и для детектирования местоположения ввода детектируют изменение в электростатической емкости между электродами, когда средство ввода, такое как палец, касается сенсорного устройства ввода. Альтернативно, существует тип сенсорных устройств ввода, в котором одинаковый потенциал в фазе прикладывают к обоим концам прозрачной проводящей пленки, и для детектирования местоположения ввода детектируют слабый ток, протекающий, когда средство ввода, такое как палец, касается или находится вблизи сенсорного устройства ввода, образуя конденсатор.
В общем, сенсорное устройство ввода содержит двухпанельную слоистую структуру, в которой первая панель и вторая панель соединены с использованием адгезива, причем первая панель включает в себя первые воспринимающие рисунки, расположенные в первом направлении (например, в направлении оси х) на первой подложке, и множество первых металлических рисунков, электрически соединяющих цепи датчиков для вычисления местоположения первых воспринимающих рисунков, и вторая панель включает в себя вторые воспринимающие рисунки, расположенные во втором направлении (например, в направлении оси y) на второй подложке, и множество вторых металлических рисунков, электрически соединяющих цепи датчиков для вычисления местоположений вторых воспринимающих рисунков.
Дополнительно, выложенная заявка на патент Кореи № 10-2008-0110477 раскрывает двухслойную электростатическую емкостную сенсорную панель одноэлементного типа.
Однако обычную электростатическую емкостную сенсорную площадку образуют только на слабоизогнутой поверхности, и не существует технологии для образования сенсорной площадки на сложной криволинейной поверхности.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
Целью настоящего раскрытия является обеспечение сенсорного устройства ввода, способного выполнять сенсорный ввод без сбоев даже в случае сложной формы, и способа его изготовления.
ТЕХНИЧЕСКОЕ РЕШЕНИЕ
Согласно одному аспекту настоящего раскрытия, сенсорное устройство ввода содержит: сенсорный участок, выполненный с возможностью приема сигнала касания пользователя и имеющий вогнутый участок; основание, полностью объединенное (совмещенное) с сенсорным участком или расположенное на нижней стороне сенсорного участка и имеющее канавки в виде рисунков (структурированные канавки) в области, соответствующей сенсорному участку; и воспринимающие рисунки, содержащие проводящий материал и расположенные в канавок в виде рисунков, причем воспринимающие рисунки, расположенные на нижней стороне вогнутого участка, имеют меньшее сопротивление, чем сопротивление воспринимающих рисунков, расположенных на внешней стороне вогнутого участка.
Воспринимающие рисунки, расположенные на нижней стороне вогнутого участка, могут иметь большую ширину вертикального поперечного сечения, чем ширина вертикального поперечного сечения воспринимающих рисунков, расположенных на внешней стороне вогнутого участка.
Основание может включать в себя комплексное соединение металла.
Основание может содержать смолу, включающую в себя по меньшей мере один из поликарбоната (PC), полиамида (PA) и сополимера акрилонитрила-бутадиена-стирола (ABS) и оксид металла, включающий в себя по меньшей мере одно из Mg, Cr, Cu, Ba, Fe, Ti и Al.
Сенсорное устройство ввода может дополнительно содержать исходный материал, на котором образуют сенсорный участок, и основание может быть обеспечено посредством его нанесения на нижнюю поверхность исходного материала.
Исходный материал может быть любым из смолы, стекла и кожи.
Основание может содержать первое основание, расположенное на нижней стороне исходного материала, и второе основание, расположенное на нижней стороне первого основания, а канавки в виде рисунков и воспринимающие рисунки могут включать в себя канавки в виде первого рисунка и первые воспринимающие рисунки, образованные на одной поверхности первого основания, и канавки в виде второго рисунка и вторые воспринимающие рисунки, образованные на одной поверхности второго основания.
Согласно другому аспекту настоящего раскрытия, способ изготовления сенсорного устройства ввода содержит: приготовление исходного материала, содержащего вогнутый участок; приготовление основания, содержащего комплексное соединение металла, на нижней стороне исходного материала; образование канавок в виде рисунков за счет облучения лазером сенсорного участка основания, причем канавки в виде рисунков в области, в которой расположен вогнутый участок, и канавки в виде рисунков в области на внешней стороне вогнутого участка образуют отличными друг от друга по меньшей мере в одной из ширины и глубины; и образование воспринимающих рисунков, включающих в себя проводящий материал, в канавках в виде рисунков за счет процесса нанесения покрытия или процесса осаждения.
Канавки в виде рисунков в области, в которой расположен вогнутый участок, могут иметь по меньшей мере одну из ширины и глубины, большую, чем по меньшей мере одна из ширины и глубины канавок в виде рисунков во внешней области вогнутого участка.
На внутренних поверхностях канавок в виде рисунков при облучении лазером на одной поверхности основания могут открываться металлические затравки (зерна), и к металлическим затравкам при нанесении покрытия или осаждении воспринимающих рисунков может прикрепляться проводящий материал.
Образование канавок в виде рисунков может содержать образование канавок в виде первого рисунка и канавок в виде второго рисунка, расположенных отдельно от канавок в виде первого рисунка, а образование воспринимающих рисунков может содержать образование первых воспринимающих рисунков, наносимых или осаждаемых в канавки в виде первого рисунка, и вторых воспринимающих рисунков, наносимых или осаждаемых в канавки в виде второго рисунка, причем способ может дополнительно содержать определение того, могут или нет первые и вторые воспринимающие рисунки быть использованы в качестве датчика, путем подачи тока на первые и вторые воспринимающие рисунки и проверки изменения взаимной емкости между первыми и вторыми воспринимающими рисунками.
Согласно другому аспекту настоящего раскрытия, транспортное средство содержит сенсорное устройство ввода.
Сенсорное устройство ввода может быть установлено в централизованной системе управления коробкой передач.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ
Сенсорное устройство ввода согласно вариантам осуществления настоящего раскрытия позволяет пользователю выполнять сенсорный ввод в требуемой точке за счет увеличения сопротивления углубленного участка, даже когда обеспечена сенсорная поверхность, имеющая сложную форму, включающую в себя вогнутый участок.
Поскольку сенсорное устройство ввода согласно вариантам осуществления настоящего раскрытия изготавливают с использованием способа прямого лазерного структурирования (LDS), процесс изготовления может быть упрощен, и производственные затраты могут быть уменьшены.
Дополнительно, за счет неиспользования процесса обеспечения адгезии для образования воспринимающих рисунков на основании, можно обеспечить отсутствие вибраций и ударов и улучшить надежность.
Поскольку основание, на котором обеспечен сенсорный участок, может быть продолжено до участка, соединяющегося с интегральной схемой, и выполнено как единое целое, процесс изготовления может быть упрощен, и производственные затраты могут быть уменьшены.
Дополнительно, поскольку основание может быть образовано способом инжекции, затраты на изготовление могут быть уменьшены.
Кроме того, связующие участки, используемые для электрического соединения воспринимающих рисунков с интегральной схемой, могут быть минимизированы, тем самым улучшая надежность при высокой температуре и вибрациях.
Даже когда сенсорный участок снабжен несколькими криволинейными поверхностями, могут быть образованы воспринимающие рисунки.
Надежность может быть улучшена, даже когда продукт используется в среде с высокой температурой, за счет изготовления в условиях высокой температуры с использованием лазера.
Дополнительно, даже когда требуются различные размеры изделия, можно обеспечить обработку без модификации производственного оборудования, тем самым уменьшая производственные затраты и сокращая производственный маршрут.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является структурной схемой, показывающей компоновку электродов сенсорного устройства ввода согласно первому варианту осуществления настоящего раскрытия.
Фиг. 2 является видом в поперечном сечении, показывающим сенсорное устройство ввода согласно первому варианту осуществления настоящего раскрытия.
Фиг. 3 является перспективным изображением в разобранном виде, показывающим сенсорное устройство ввода согласно первому варианту осуществления настоящего раскрытия.
Фиг. 4 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства ввода согласно первому варианту осуществления настоящего раскрытия.
Фиг. 5-11 схематично показывают способ изготовления сенсорного устройства ввода согласно первому варианту осуществления настоящего раскрытия; причем фиг. 5 показывает этап приготовления первого основания, фиг. 6 показывает этап образования канавок в виде первого рисунка, фиг. 7 показывает этап образования первых воспринимающих рисунков, фиг. 8 показывает этап укладки второго основания, фиг. 9 показывает этап образования канавок в виде второго рисунка, фиг. 10 показывает этап образования вторых воспринимающих рисунков, а фиг. 11 показывает этап укладки слоя краски.
Фиг. 12 является видом в поперечном сечении, показывающим сенсорное устройство ввода согласно второму варианту осуществления настоящего раскрытия.
Фиг. 13 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства ввода согласно второму варианту осуществления настоящего раскрытия.
Фиг. 14 является видом в поперечном сечении, показывающим сенсорное устройство ввода согласно третьему варианту осуществления настоящего раскрытия.
Фиг. 15 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства ввода согласно третьему варианту осуществления настоящего раскрытия.
Фиг. 16 является видом в поперечном сечении, показывающим сенсорное устройство ввода согласно четвертому варианту осуществления настоящего раскрытия.
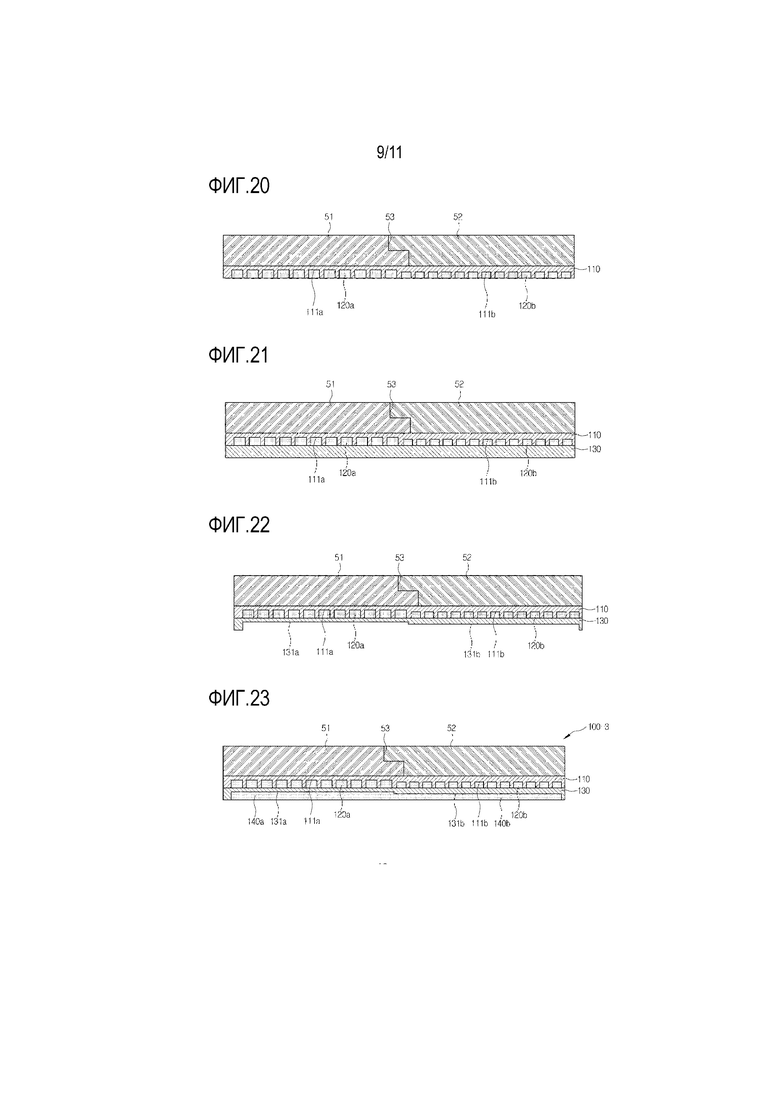
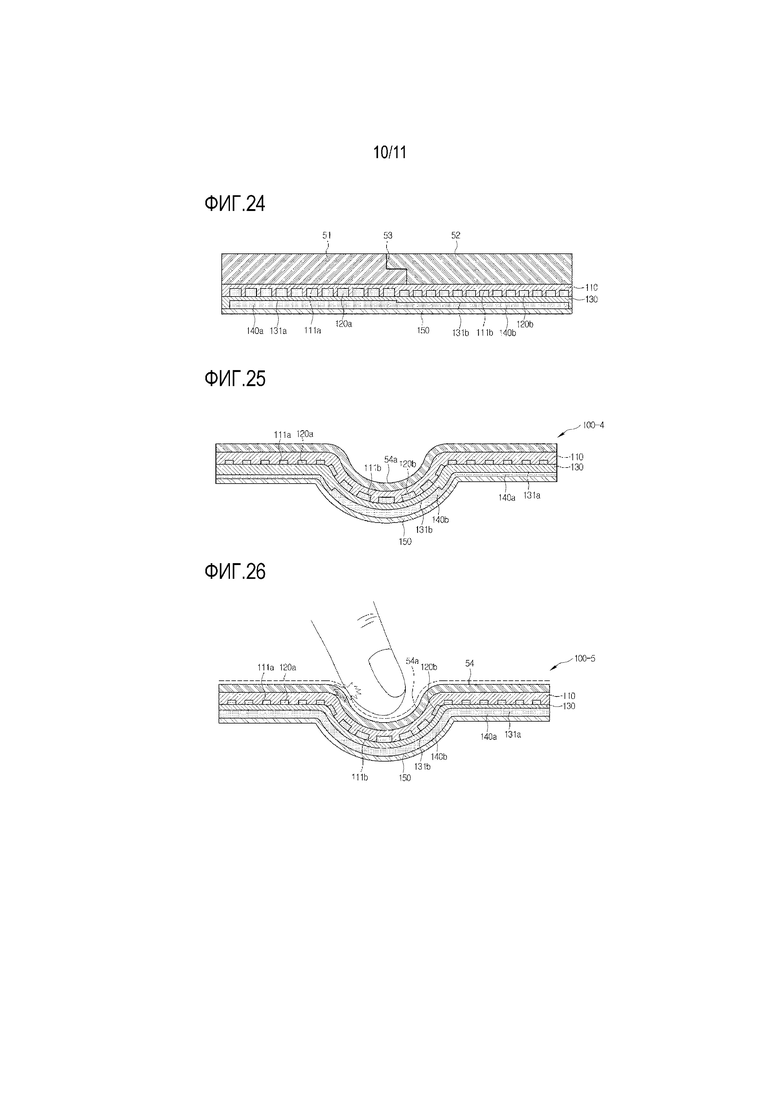
Фиг. 17-24 схематично показывают способ изготовления сенсорного устройства ввода согласно четвертому варианту осуществления настоящего раскрытия; причем фиг. 17 показывает этап приготовления различных видов исходных материалов, фиг. 18 показывает этап укладки первого основания, фиг. 19 показывает этап образования канавок в виде первого рисунка, фиг. 20 показывает этап образования первых воспринимающих рисунков, фиг. 21 показывает этап укладки второго основания, фиг. 22 показывает этап образования канавок в виде второго рисунка, фиг. 23 показывает этап образования вторых воспринимающих рисунков, а фиг. 24 показывает этап укладки слоя краски.
Фиг. 25 является видом в поперечном сечении, показывающим сенсорное устройство ввода согласно пятому варианту осуществления настоящего раскрытия.
Фиг. 26 является видом, показывающим состояние сбоя, когда значения сопротивления выполнены постоянными по кривизне.
Фиг. 27 является видом, показывающим рабочее состояние, когда значения сопротивления выполнены изменяемыми согласно кривизне.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Далее здесь будут подробно описаны варианты осуществления настоящего раскрытия со ссылкой на сопутствующие чертежи. Нижеследующие варианты осуществления обеспечены, чтобы полностью передать сущность настоящего раскрытия специалисту в данной области техники, к которой принадлежит настоящее раскрытие. Настоящее раскрытие не ограничено вариантами осуществления, показанными здесь, и может быть реализовано в других формах. Чертежи никоим образом не предназначены для ограничения объема настоящего раскрытия, и размеры компонентов могут быть преувеличены для ясности иллюстрации.
Сенсорное устройство ввода может быть обеспечено в форме сенсорной площадки или в форме сенсорной панели. Сенсорное устройство ввода является средством для приема сигнала при контакте (или близости) средства ввода, такого как палец пользователя, и считывания местоположения контакта (или близости).
Сенсорную площадку используют главным образом в качестве устройства ввода портативного компьютера или подобного, а в последнее время её используют в качестве устройства ввода транспортного средства. Сенсорная панель является видом интерактивного графического устройства ввода, в котором пользователь может непосредственно указывать местоположение при просмотре экрана.
Конструкция сенсорного устройства 100 ввода будет описана со ссылкой на фиг. 1.
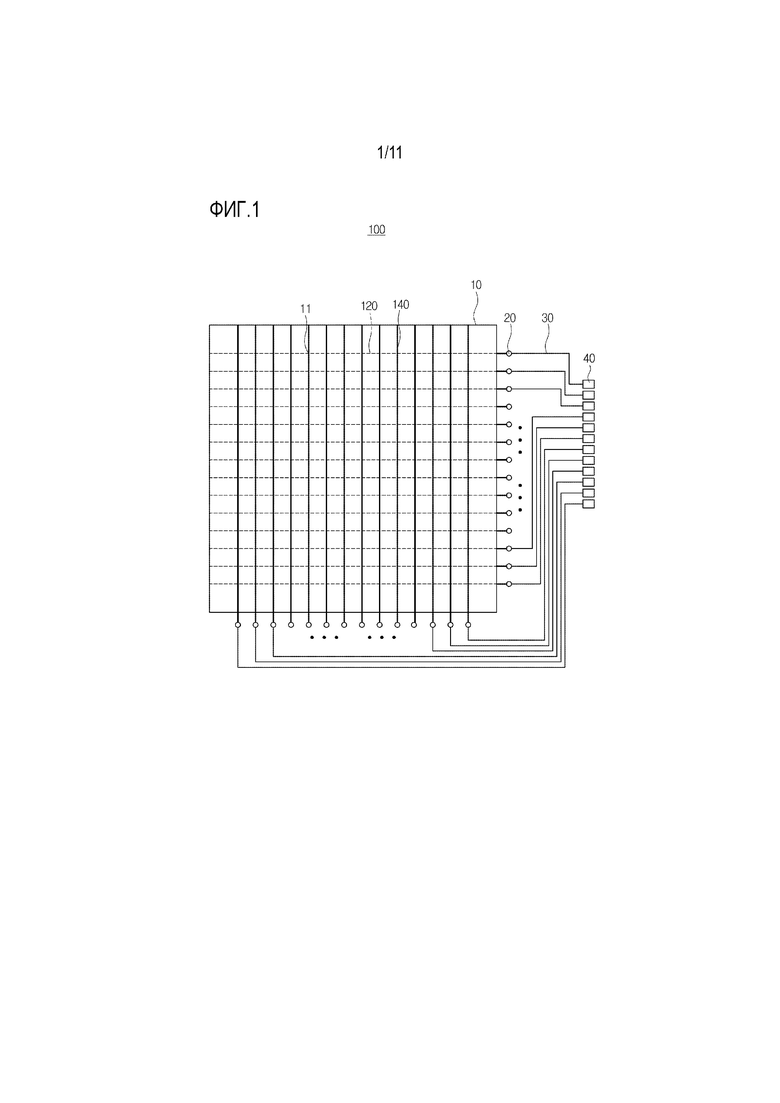
Фиг. 1, которая является структурной схемой, показывающей компоновку электродов сенсорного устройства 100 ввода согласно первому варианту осуществления настоящего раскрытия, является видом сверху, показывающим способы работы сенсорного устройства 100 ввода в доходчивой форме, который отличается от того, что фактически показано в конструкции сенсорного устройства 100 ввода. Сенсорное устройство 100 ввода содержит сенсорный участок 10, способный контактировать со средством ввода пользователя (например, пальцем или стилусом для сенсорного экрана), первые и вторые воспринимающие рисунки 120 и 140, образованные как единое целое с сенсорным участком 10 или расположенные под сенсорным участком 10, межсоединения (электропроводка) 30 и соединительные площадки 40, соединенные с воспринимающими рисунками 120 и 140.
Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут иметь заданный рисунок с тем, чтобы они могли детектировать изменение в емкости, когда пользователь касается сенсорного устройства 100 ввода пальцем, стилусом для сенсорного экрана или подобным. Здесь контакт (касание) может быть определен как включающий в себя как непосредственный контакт, так и непрямой контакт. Таким образом, непосредственный контакт указывает на случай, когда объект касается сенсорного устройства 100 ввода, а непрямой контакт указывает на состояние, в котором объект не касается сенсорного устройства 100 ввода, а приближается в пределы диапазона, где воспринимающая рисунок может воспринимать объект.
Первые воспринимающие рисунки 120 могут быть расположены в заданной секции в первом направлении (поперечное направление на чертеже), а вторые воспринимающие рисунки 140 могут быть расположены в заданной секции в направлении (продольном направлении на чертеже), отличном от первого направления. Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 обеспечены в слоях, отличных друг от друга, и образуют пересечения 11. Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут не находиться в непосредственном контакте друг с другом в пересечениях 11, а могут перекрывать друг друга с изолирующим участком, расположенным между ними.
Пересечения 11 могут определять разрешение сенсорного участка 10 и могут распознаваться в качестве координат. Таким образом, можно различить случай, когда средство ввода находится в контакте с пересечением 11, и случай, когда средство ввода находится в контакте с пересечением 11, смежным с упомянутым пересечением 11, и можно определить, с каким пересечением 11 контактировало средство ввода. Таким образом, по мере увеличения числа пересечений 11 в одной и той же области, разрешение сенсорного участка 10 увеличивается.
Одни концы каждого из первых и вторых воспринимающих рисунков 120 и 140 могут быть соединены с межсоединениями 30, образованными из металлических проводников или подобного. Соединительные площадки 40 обеспечены на одних концах межсоединений 30, и каждое межсоединение 30 может быть соединено с монтажной платой (не показана) через каждую соединительную площадку 40.
Соединительные участки 20 могут быть обеспечены на одних концевых участках первых и вторых воспринимающих рисунков 120 и 140. Поскольку соединительные участки 20 шире, чем ширины первых и вторых воспринимающих рисунков 120 и 140, легко электрически соединять межсоединения 30. Соединительные участки 20 и межсоединения 30 могут быть связаны проводящим адгезивом (например, припоем).
Межсоединения 30 передают сигнал касания воспринимающих рисунков 120 и 140 на монтажную плату через соединительные площадки 40. Межсоединения 30 и соединительные площадки 40 могут быть образованы из проводящего материала.
Когда средство ввода касается одной области сенсорного участка 10, емкость пересечения 11 уменьшается, информация о емкости достигает монтажной платы, работающей в качестве блока управления, через межсоединение 30 и соединительную площадку 40, и блок управления может определить, в каком местоположении осуществлен контакт средством ввода. Дополнительно, может быть обеспечено, чтобы емкость уменьшалась, когда средство ввода приближается к одной области сенсорного участка 10. В этом случае блок управления может определить, к какому местоположению приближается средство ввода.
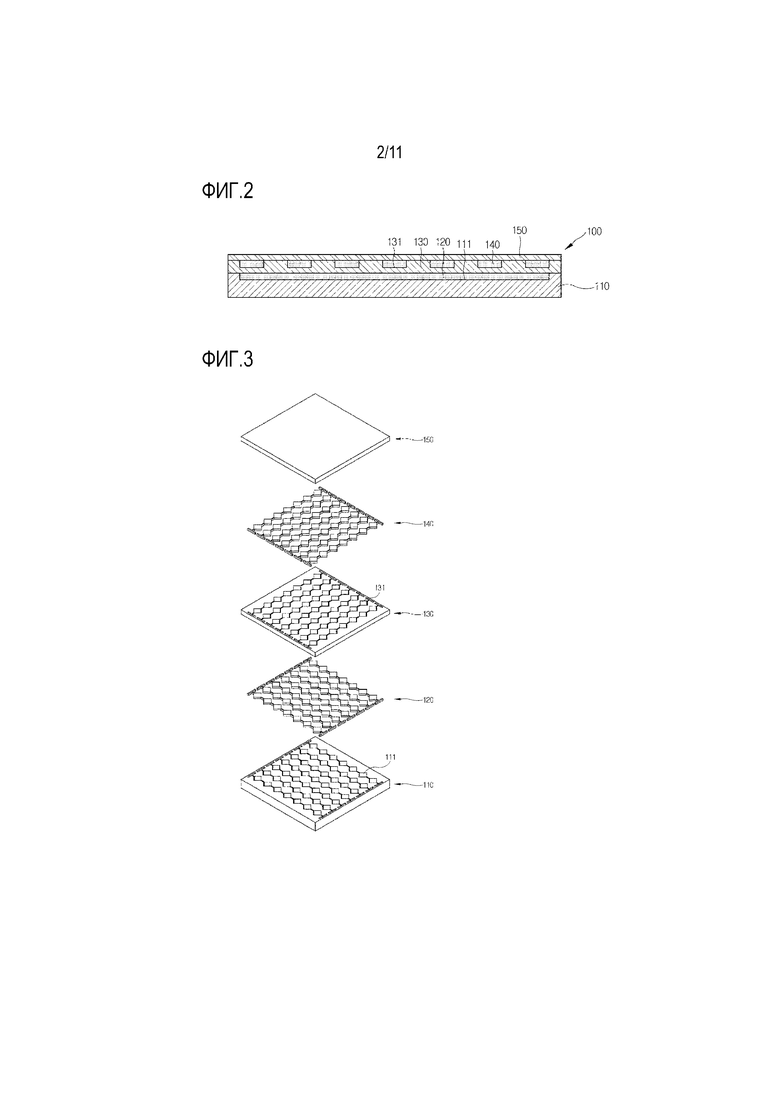
Фиг. 2 является видом в поперечном сечении, показывающим сенсорное устройство 100 ввода согласно первому варианту осуществления настоящего раскрытия, и фиг. 3 является перспективным изображением в разобранном виде, показывающим сенсорное устройство 100 ввода согласно первому варианту осуществления настоящего раскрытия.
Сенсорное устройство 100 ввода может содержать первое основание 110, включающее в себя канавки в виде первого рисунка 111, первые воспринимающие рисунки 120, нанесенные в канавки в виде первого рисунка 111, второе основание 130, которое уложено на первое основание 110 и включает в себя канавки в виде второго рисунка 131, вторые воспринимающие рисунки 140, нанесенные в канавки в виде второго рисунка 131, и слой 150 краски для изоляции вторых воспринимающих рисунков 140.
Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут быть образованы на первом основании 110 и втором основании 130 с использованием способа прямого лазерного структурирования (LDS). Здесь, LDS-способ относится к способу образования материала-основы с помощью материала, включающего в себя непроводящее и химически стабильное комплексное соединение металла, открытия металлической затравки за счет разрушения химической связи комплексного соединения металла при экспонировании части материала-основы лазером, таким как ультрафиолетовый (UV) лазер или эксимерный лазер, и затем металлизации материала-основы с образованием проводящей структуры на экспонированном лазером участке материала-основы. Такой LDS-способ раскрыт в корейской патентной публикации №374667, выложенной корейской патентной публикации №2001-40872 и выложенной корейской патентной публикации №2004-21614, раскрытия которых включены сюда посредством ссылки.
Первые и вторые воспринимающие рисунки 120 и 140 могут быть образованы из проводящего материала, например, металла. Из металлов может быть использована медь (Cu) с учетом ее проводимости и экономической эффективности. Однако, в дополнение к меди, первые и вторые воспринимающие рисунки 120 и 140 могут быть образованы из металла, такого как золото (Au).
Первые воспринимающие рисунки 120 могут простираться в первом направлении (поперечное направление на чертеже), и каждый рисунок может быть расположен в рядах. Дополнительно, вторые воспринимающие рисунки 140 могут простираться во втором направлении (продольное направление на чертеже), перпендикулярно первому направлению, и каждый рисунок может быть расположен в рядах. Однако угол пересечения между первыми воспринимающими рисунками 120 и вторыми воспринимающими рисунками 140 не ограничен перпендикуляром.
Дополнительно, первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут включать в себя форму, в которой непрерывно соединяются ромбические рисунки. Однако форма рисунка не ограничена ромбом, и при необходимости могут быть использованы различные формы. Смежные ромбические рисунки могут быть соединены соединительным участком, и соединительный участок может быть обеспечен мостовым типом соединения двух рисунков.
Первое основание 110 и второе основание 130 могут включать в себя комплексное соединение металла. В качестве примера, первое основание 110 и второе основание 130 могут быть комплексным соединением, содержащим смолу и оксид металла. Смола может включать в себя по меньшей мере один из поликарбоната (PC), полиамида (PA) и сополимера акрилонитрила-бутадиена-стирола (ABS), а оксид металла может включать в себя по меньшей мере одно из Mg, Cr, Cu, Ba, Fe, Ti и Al.
Канавки в виде первого рисунка 111 для приема первых воспринимающих рисунков 120 образованы на одной поверхности первого основания 110, и канавки в виде второго рисунка 131 для приема вторых воспринимающих рисунков 140 образованы на одной поверхности второго основания 130. Таким образом, первые и вторые воспринимающие рисунки 120 и 140 могут быть обеспечены соответственно в канавках в виде первого и второго рисунков 111 и 131.
Канавки в виде первого и второго рисунков 111 и 131 могут быть образованы путем облучения лазером на одной поверхности первого и второго оснований 110 и 130. Здесь первое и второе основания 110 и 130 преобразуются в металл за счет тепла, генерируемого при образовании канавок, и участок, преобразованный в металл, образует металлическую затравку в канавках в виде первого и второго рисунков 111 и 131.
Первые и вторые воспринимающие рисунки 120 и 140 образованы путем нанесения покрытия в канавки в виде первого и второго рисунков 111 и 131. Процесс нанесения покрытия на металлическую затравку может использовать общеизвестную технологию нанесения покрытия, и поэтому его подробное описание будет исключено.
Альтернативно, первые и вторые воспринимающие рисунки 120 и 140 могут быть образованы путем процесса осаждения или путем комбинации процесса нанесения покрытия и процесса осаждения. Далее здесь будет выполнено описание на основе того, что первые и вторые воспринимающие рисунки 120 и 140 образованы посредством процесса нанесения покрытия.
Первые и вторые воспринимающие рисунки 120 и 140 могут включать в себя медное (Cu) покрытие, а никелевое (Ni) покрытие может быть нанесено на медное покрытие для предотвращения окисления. В случае использования золотого (Au) покрытия может быть улучшена проводимость.
Первое и второе основания 110 и 130 могут быть образованы за счет инжекции комплексного соединения металла или могут быть образованы за счет инжекции другого материала (например, пластика или стекла) и нанесения на него комплексного соединения металла.
Далее со ссылкой на фиг. 4-11 будет описан способ изготовления сенсорного устройства 100 ввода согласно первому варианту осуществления настоящего раскрытия.
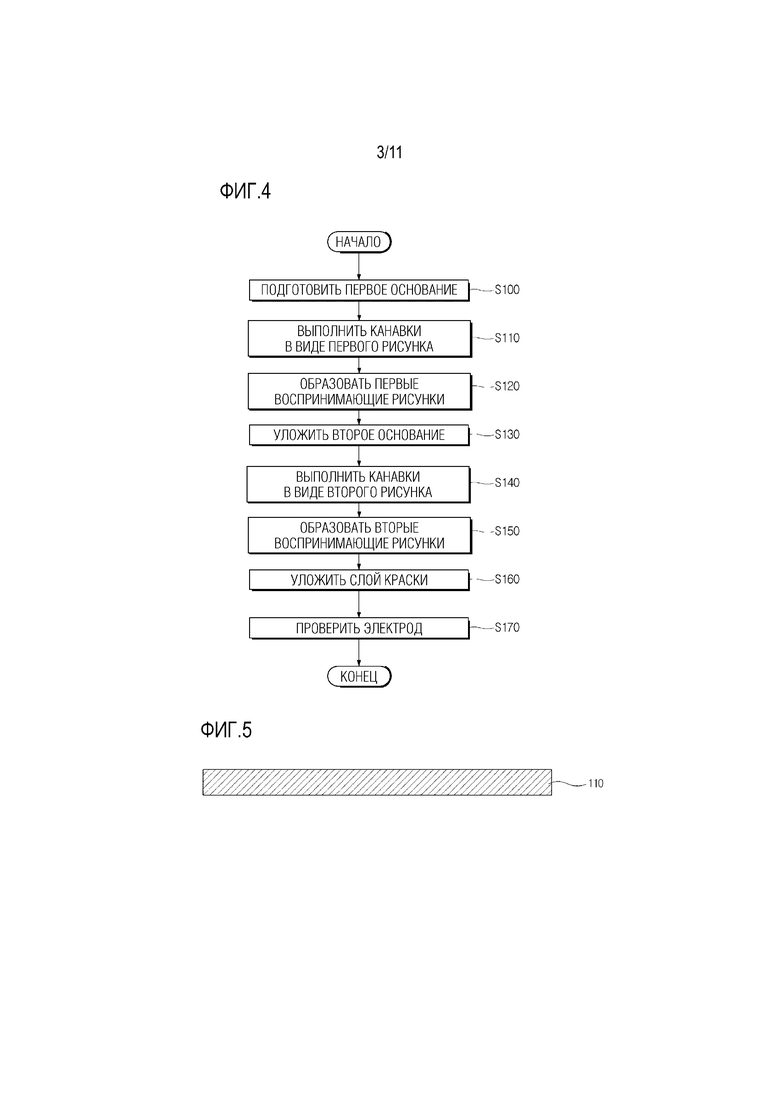
Фиг. 4 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства 100 ввода согласно первому варианту осуществления настоящего раскрытия, и фиг. 5-11 показывают способ изготовления сенсорного устройства 100 ввода согласно первому варианту осуществления настоящего раскрытия.
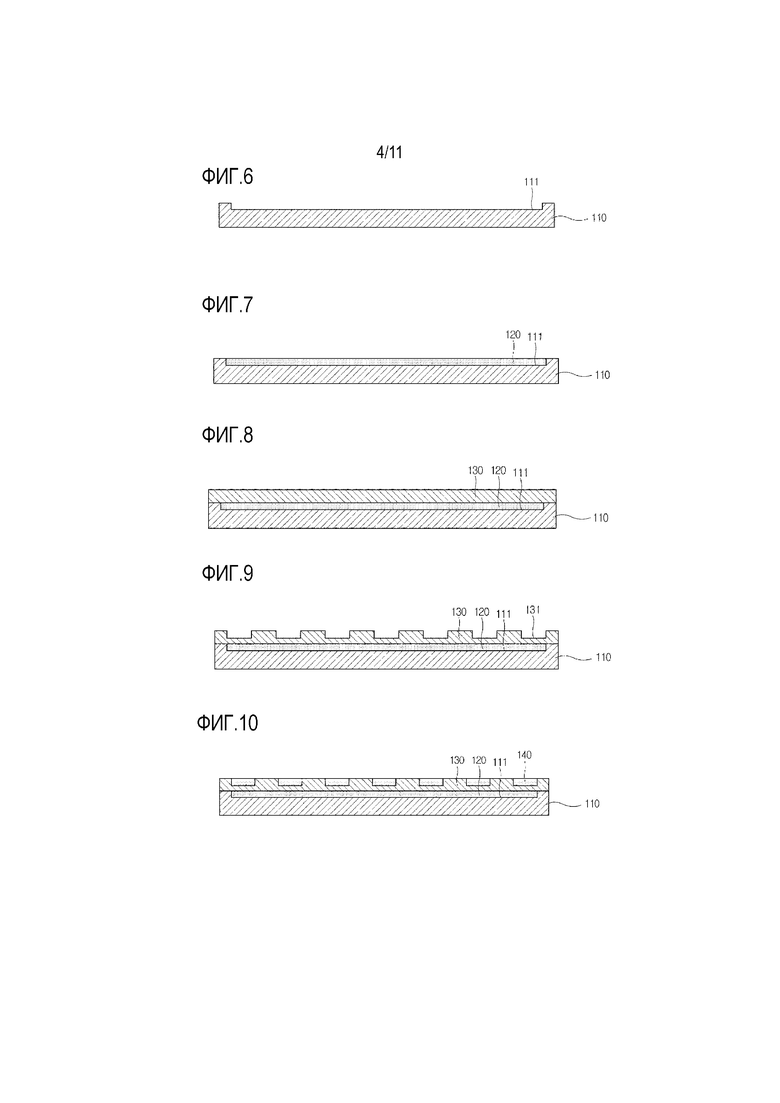
Фиг. 5 показывает этап (S100) приготовления первого основания 110.
Первое основание 110 может включать в себя комплексное соединение металла. Например, первое основание 110 может быть комплексным соединением, содержащим смолу и оксид металла. Здесь смола может включать в себя по меньшей мере один из поликарбоната (PC), полиамида (PA), и сополимера акрилонитрила-бутадиена-стирола (ABS), а оксид металла может включать в себя по меньшей мере одно из Mg, Cr, Cu, Ba, Fe, Ti и Al.
Первое основание 110 может быть образовано с использованием способа инжекции. Первое основание 110 может быть также образовано инжекцией комплексного соединения металла или может быть образовано за счет покрытия комплексным соединением металла поверхности исходного материала, выполненного из других материалов, таких как пластик или стекло.
Дополнительно, первое основание 110 может иметь криволинейную поверхность на одной поверхности. Например, криволинейная поверхность может быть образована на одной поверхности первого основания 110 таким образом, чтобы она была вогнута (была «вдавленной») в часть сферической поверхности.
Фиг. 6 является видом, показывающим этап (S110) выполнения канавок в виде первого рисунка 111.
Канавки в виде первого рисунка 111 образуют путем облучения лазером, таким как ультрафиолетовый (UV) лазер или эксимерный лазер, на одной поверхности первого основания 110. В это время тепло, генерируемое при образовании канавок, разрушает химические связи комплексного соединения металла с преобразованием его в металл и образует металлическую затравку в канавках в виде первого рисунка 111.
Канавки в виде первого рисунка 111 могут быть образованы на одной поверхности первого основания 110, которая снабжена криволинейной поверхностью. Поскольку канавки образуют путем облучения лазером, независимо от формы поверхности первого основания 110 могут быть образованы различные рисунки.
Фиг. 7 является видом, показывающим этап (S120) образования первых воспринимающих рисунков 120.
Первые воспринимающие рисунки 120 могут быть образованы путем металлизации канавок в виде первого рисунка 111, в которых открыта металлическая затравка. Например, первые воспринимающие рисунки 120 включают в себя медь, нанесенную (в виде покрытия) в канавки в виде первого рисунка 111. Дополнительно, на медное покрытие для предотвращения окисления может быть нанесен никель.
Фиг. 8 является видом, показывающим этап (S130) укладки второго основания 130, фиг. 9 является видом, показывающим этап (S140) выполнения канавок в виде второго рисунка 131, и фиг. 10 является видом, показывающим этап (S150) образования вторых воспринимающих рисунков 140.
Второе основание 130 может быть образовано из комплексного соединения металла и нанесено на первое основание 110. Дополнительно, этапы, показанные на фиг. 8-10, могут быть применены к описанию фиг. 5-7, так что избыточное описание будет исключено.
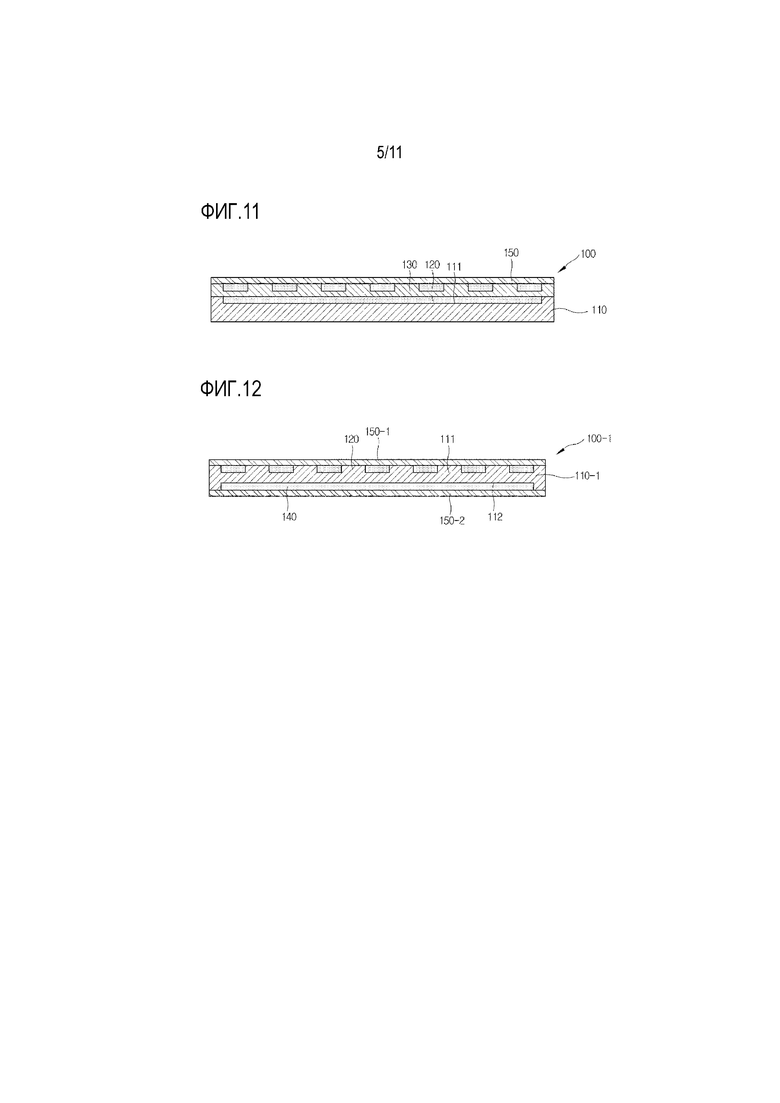
Фиг. 11 является видом, показывающим этап (S160) укладки слоя 150 краски.
Слой 150 краски может быть нанесен на второе основание 130 для защиты вторых воспринимающих рисунков 140 от внешних ударов или загрязняющих веществ. Слой 150 краски может составлять сенсорную поверхность сенсорного участка 10.
Слой 150 краски может быть образован стойкой к ультрафиолету краской или стойким к ультрафиолету покрытием, использующими экранирующее ультрафиолет вещество.
Хотя это и не показано на чертеже, способ изготовления может дополнительно включать в себя этап (S170) проверки для проверки того, работает ли должным образом сенсорное устройство 100 ввода, изготовленное по этапам фиг. 5-11.
Этап S170 проверки содержит подачу тока на первые и вторые воспринимающие рисунки 120 и 140 и проверку изменения во взаимной емкости между первыми и вторыми воспринимающими рисунками для определения того, может ли или нет данный воспринимающий элемент быть использован в качестве датчика. Это связано с тем, что при функционировании сенсорного устройства 100 ввода в качестве изделия, взаимная емкость между первыми и вторыми воспринимающими рисунками 120 и 140 изменяется, когда средство ввода контактирует с сенсорным участком 10, и местоположение, которого касается средство ввода, должно быть детектировано путем детектирования такого изменения.
Этап S170 проверки может быть выполнен перед этапом S160 укладки слоя 150 краски. Это связано с тем, что может случиться, что потребуется ремонт вторых воспринимающих рисунков 140 при приеме определения несоответствия на этапе S170 проверки.
Фиг. 12 является видом в поперечном сечении, показывающим сенсорное устройство 100-1 ввода согласно второму варианту осуществления настоящего раскрытия.
Со ссылкой на фиг. 13, сенсорное устройство 100-1 ввода согласно второму варианту осуществления настоящего раскрытия содержит основание 110-1, канавки в виде первого рисунка 111, образованные на одной поверхности основания 110-1, канавки в виде второго рисунка 112, образованные на задней поверхности основания 110-1, первые воспринимающие рисунки 120, нанесенные в канавки в виде первого рисунка 111, вторые воспринимающие рисунки 140, нанесенные в канавки в виде второго рисунка 112, первый слой 150-1 краски, нанесенный на одну поверхность основания 110-1, и второй слой 150-2 краски, нанесенный на другую поверхность основания 110-1.
Сенсорное устройство 100-1 ввода согласно второму варианту осуществления настоящего раскрытия может образовывать первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 на обеих сторонах основания, соответственно. Таким образом, поскольку только одно основание 110-1 используется для образования двухслойных воспринимающих рисунков, толщина сенсорного устройства 100 ввода может быть уменьшена, и может быть изготовлено тонкое изделие.
Соединительные участки 20 для соединения воспринимающих рисунков 120 и 140 и межсоединений 30 могут быть образованы на одной поверхности основания 110-1. Для этой цели либо первые воспринимающие рисунки 120, либо вторые воспринимающие рисунки 140 могут простираться на противоположную поверхность основания 110-1 и могут быть соединены с соединительными участками 20.
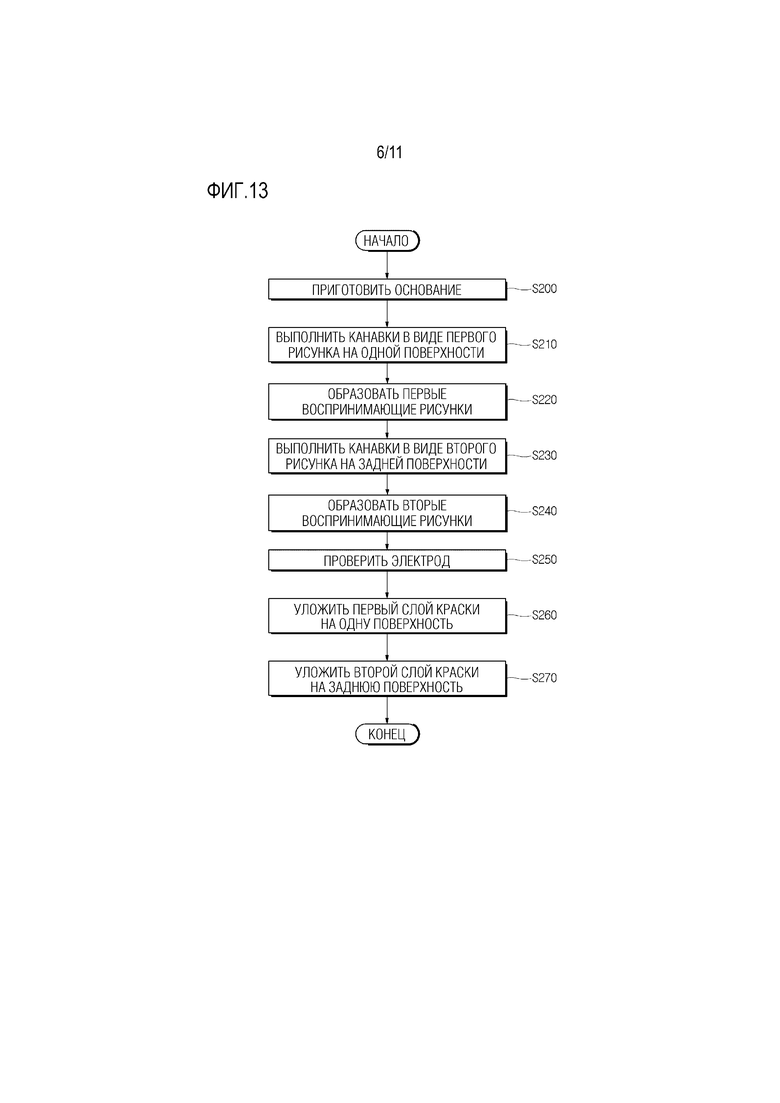
Фиг. 13 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства 100-1 ввода согласно второму варианту осуществления настоящего раскрытия.
Способ изготовления сенсорного устройства 100-1 ввода согласно второму варианту осуществления настоящего раскрытия содержит этапы, на которых: сначала приготавливают (S200) основание 110-1; выполняют (S210) канавки в виде первого рисунка 111 на одной поверхности основания 110-1; образуют (S220) первые воспринимающие рисунки 120 в канавках в виде первого рисунка 111 путем нанесения покрытия; переворачивают (S230) основание 110-1 и выполняют канавки в виде второго рисунка 112 на задней поверхности основания 110-1; образуют (S240) вторые воспринимающие рисунки 140 в канавках в виде второго рисунка 112 путем нанесения покрытия; укладывают (S260) первый слой 150-1 краски на одну поверхность основания 110-1 для защиты первых воспринимающих рисунков 120; и укладывают (S270) второй слой 150-2 краски на другую поверхность основания 110-1 для защиты вторых воспринимающих рисунков 140.
Альтернативно, этап S210 выполнения канавок в виде первого рисунка 111 на одной поверхности основания 110-1 и этап S230 выполнения канавок в виде второго рисунка 112 на задней поверхности основания 110-1 могут быть выполнены одновременно или непрерывно. Дополнительно, этап S220 нанесения в виде покрытия первых воспринимающих рисунков 120 и этап S240 нанесения в виде покрытия вторых воспринимающих рисунков 140 могут быть выполнены одновременно или непрерывно.
Этап S250 проверки того, работают ли нормально первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140, может быть выполнен перед этапами (S260, S270) укладки первого и второго слоев 150 краски.
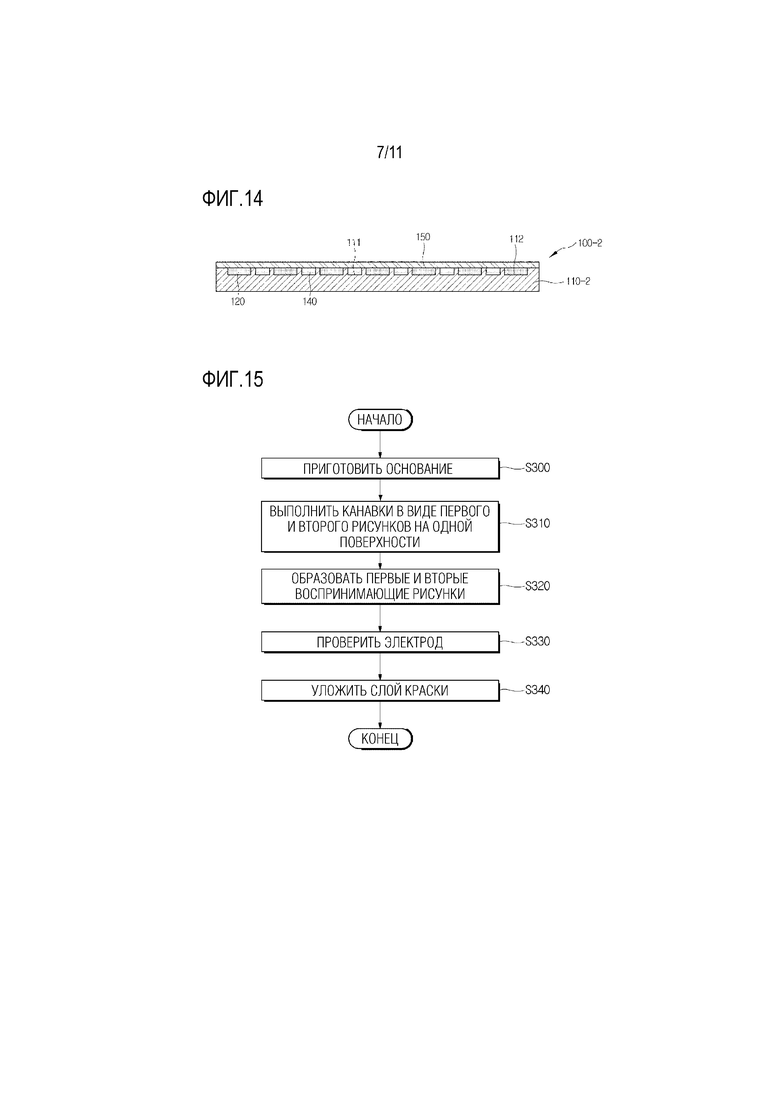
Фиг. 14 является видом в поперечном сечении, показывающим сенсорное устройство 100-2 ввода согласно третьему варианту осуществления настоящего раскрытия.
Со ссылкой на фиг. 14 сенсорное устройство 100-2 ввода согласно третьему варианту осуществления настоящего раскрытия содержит основание 110-2, канавки в виде первого рисунка 111 и канавки в виде второго рисунка 112, образованные на одной поверхности основания 110-2, первые воспринимающие рисунки 120, нанесенные в канавки в виде первого рисунка 111, вторые воспринимающие рисунки 140, нанесенные в канавки в виде второго рисунка 112, и слой 150 краски, нанесенный на одну поверхность основания 110-2.
Сенсорное устройство 100-2 ввода согласно третьему варианту осуществления настоящего раскрытия может образовывать как первые воспринимающие рисунки 120, так и вторые воспринимающие рисунки 140 на одной стороне основания 110-2. Таким образом, поскольку только одно основание 110-2 используется для образования двухслойных воспринимающих рисунков, толщина сенсорного устройства 100 ввода может быть уменьшена, и может быть изготовлено тонкое изделие.
Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 не соединены друг с другом, а находятся на некотором расстоянии друг от друга. Первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут образовывать рисунки, не пересекающиеся друг с другом. Форма рисунков может быть обеспечена различным образом. Например, патентная публикация США №2015-0234492 раскрывает множество рисунков, образованных на одной поверхности.
Альтернативно, первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 могут быть структурированы таким образом, чтобы они пересекались друг с другом, и электрод реле (не показан) может быть использован для предотвращения контакта первых и вторых воспринимающих рисунков 120 и 140 друг с другом на пересечениях.
Фиг. 15 является блок-схемой последовательности операций, показывающей способ изготовления сенсорного устройства 100-2 ввода согласно третьему варианту осуществления настоящего раскрытия.
Способ изготовления сенсорного устройства 100-2 ввода согласно третьему варианту осуществления настоящего раскрытия содержит этапы, на которых: сначала приготавливают (S300) основание 110-2; выполняют (S310) канавки в виде первого рисунка 111 и канавки в виде второго рисунка 112 на одной поверхности основания 110-2; образуют (S320) первые воспринимающие рисунки 120 в канавках в виде первого рисунка 111 путем нанесения покрытия, и образуют вторые воспринимающие рисунки 140 в канавках в виде второго рисунка 112 путем нанесения покрытия; и укладывают (S340) слой 150 краски на одну поверхность основания 110-2 для защиты первых и вторых воспринимающих рисунков 120 и 140.
Этап S330 проверки того, работают ли первые воспринимающие рисунки 120 и вторые воспринимающие рисунки 140 нормально, может быть выполнен перед этапом (S340) укладки слоя 150 краски.
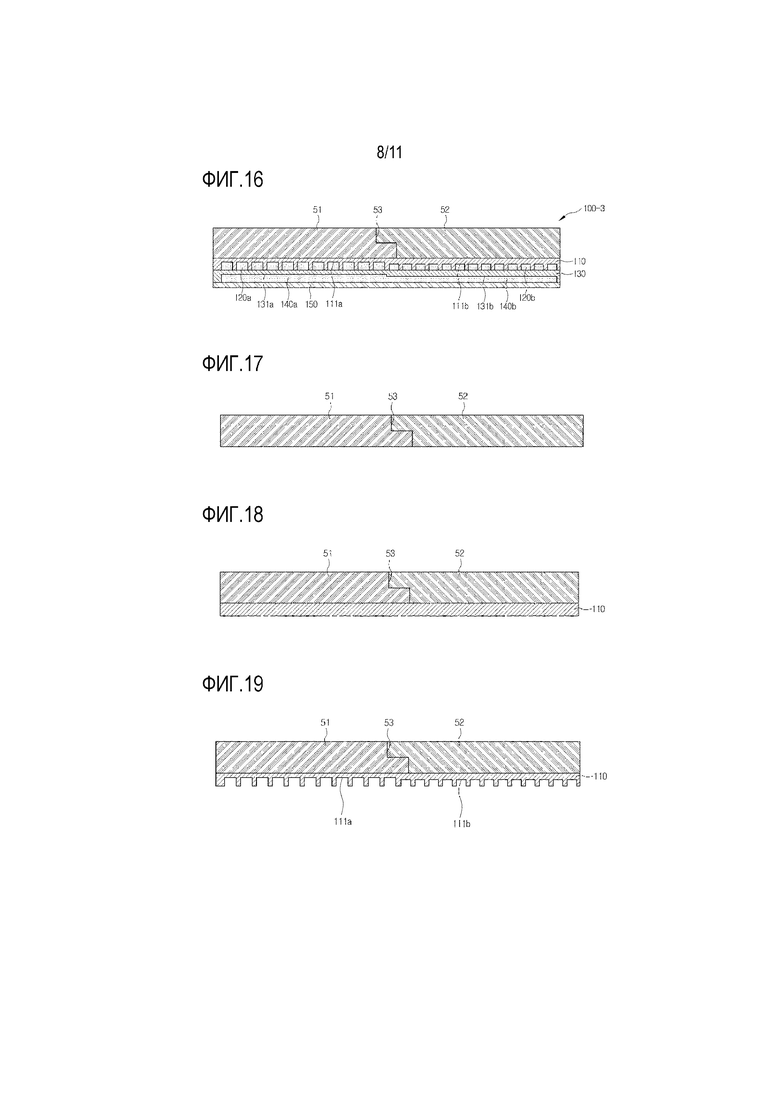
Фиг. 16 является видом в поперечном сечении, показывающим сенсорное устройство 100-3 ввода согласно четвертому варианту осуществления настоящего раскрытия.
Сенсорное устройство 100-3 ввода согласно четвертому варианту осуществления настоящего раскрытия может быть обеспечено на нижней поверхности исходных материалов 51 и 52, снабженных различными материалами. Таким образом, пользователь может вводить сигнал касания в сенсорное устройство 100-3 ввода за счет касания исходных материалов 51 и 52.
Исходные материалы 51 и 52 могут быть выполнены из непроводящего материала. В качестве примера исходные материалы 51 и 52 могут включать в себя смолу, стекло, кожу или подобное. Дополнительно, исходные материалы 51 и 52 могут иметь сравнительно небольшую толщину. Толщина исходных материалов 51 и 52 может быть задана в диапазоне, в котором может происходить изменение взаимной емкости первых и вторых воспринимающих рисунков 120 и 140, обеспеченных на задних поверхностях исходных материалов 51 и 52, когда человек касается исходных материалов 51 и 52 пальцем.
Удобство использования сенсорного устройства ввода может быть увеличено за счет присоединения первого и второго оснований 110 и 130, на которых образованы первые и вторые воспринимающие рисунки 120 и 140, к исходным материалам 51 и 52. Сначала, путем прикрепления первого основания 120 к исходным материалам 51 и 52, снабженным различными материалами, может быть изменен выбор материалов исходных материалов 51 и 52. Дополнительно, путем использования процесса нанесения покрытия для прикрепления первого основания 120 к исходным материалам 51 и 52, может быть улучшена стойкость к теплу, вибрациям или подобному.
Например, когда сенсорное устройство ввода согласно этому варианту осуществления настоящего раскрытия используется в транспортном средстве, удобство использования является очень высоким. В качестве примера, сенсорное устройство ввода может быть установлено в коробке передач и может работать в качестве центральной системы управления, или может быть обеспечено в рычаге управления, во внутренней отделке дверей, потолке, стекле, стойке или подобном для замены физической кнопки.
Исходные материалы 51 и 52 могут иметь неупругие или упругие поверхности. Исходные материалы 51 и 52 могут быть жесткими и недеформируемыми или могут быть гибкими. Дополнительно, исходные материалы 51 и 52 могут быть образованы способом литьевого формования.
Исходные материалы 51 и 52 могут быть обеспечены путем соединения материалов разных видов. Таким образом, первый исходный материал 51 и второй исходный материал 52 могут быть соединены друг с другом. В случае транспортного средства в качестве примера, внутренние устройства обеспечивают путем соединения различных материалов друг с другом. Например, смола и стекло могут быть соединены друг с другом, или разные виды смол могут быть соединены вместе.
При обеспечении сенсорной площадки за счет соединения разных материалов, как описано выше, может быть усилена красота интерьера. Дополнительно, пользователь может иметь разные ощущения касания в зависимости от материала. Однако, когда материалы исходных материалов 51 и 52 отличны друг от друга, диэлектрические проницаемости исходных материалов 51 и 52 могут отличаться друг от друга, что может вызвать проблему однородного распознавания касаний.
Сенсорное устройство 100-3 ввода согласно четвертому варианту осуществления настоящего раскрытия может позволить пользователю выполнять непрерывный сенсорный ввод через границу 53 разных видов исходных материалов 51 и 52. Дополнительно, степень распознавания касаний может быть выполнена однородной несмотря на то, что материалы исходных материалов 51 и 52 отличны друг от друга. Таким образом, чувствительность к касанию, когда сигнал касания вводится в первый исходный материал 51, и чувствительность к касанию, когда сигнал касания вводится во второй исходный материал 52, могут быть обеспечены равными.
Далее будет приведено описание способа, в котором сенсорное устройство 100-3 ввода, обеспеченное на нижней стороне разных видов исходных материалов 51 и 52 (материалов подложки), обеспечивает однородное касание для пользователя.
Поверхности первого исходного материала 51 и второго исходного материала 52 могут быть соединены друг с другом. В то же время, для увеличения силы соединения, вертикальное поперечное сечение участка соединения может быть обеспечено в ступенчатой форме. Первый и второй исходные материалы 51 и 52 могут быть обеспечены с одной и той же высотой. Таким образом, верхние поверхности первого и второго исходных материалов 51 и 52 образуют одну и ту же плоскость, и нижние поверхности первых и вторых исходных материалов 51 и 52 также могут образовывать одну и ту же плоскость.
Первое основание 110 может быть нанесено и прикреплено к нижним частям первого и второго исходных материалов 51 и 52. Первое основание 110 может покрывать границу 53 между первым и вторым исходными материалами 51 и 52. Таким образом, первое основание 110 может целиком включать в себя нижнюю часть первого и второго исходных материалов 51 и 52.
Канавки в виде первого рисунка 111 могут быть образованы на нижней поверхности первого основания 110. Канавки в виде первого рисунка 111 могут включать в себя множество рисунков, расположенных в одном направлении.
Дополнительно, канавки в виде первого рисунка 111 могут иметь разные ширины или глубины в зависимости от диэлектрических проницаемостей исходных материалов 51 и 52. Для однородного обеспечения восприятия касания на сенсорной поверхности в сенсорном устройстве ввода емкостного типа, величина изменения емкости должна быть постоянной по площади контакта со средством ввода пользователя.
Величина изменения в электростатической емкости означает степень, в которой емкость после контакта с пользовательским средством ввода уменьшается относительно емкости перед контактом с пользовательским средством ввода. Это связано с тем, что электростатическая емкость, уменьшенная при касании зарядов средством ввода, теряется через исходные материалы 51 и 52 и средство ввода пользователя.
Формула для электростатической емкости приведена ниже.
C=εs/d (С: электростатическая емкость, ε: диэлектрическая проницаемость, s: ширина электрода, d: расстояние между электродом и средством ввода)
В вышеприведенной формуле диэлектрическая проницаемость зависит от диэлектрических проницаемостей исходных материалов 51 и 52.
Со ссылкой на вышеприведенную формулу можно увидеть, что когда диэлектрические проницаемости исходных материалов 51 и 52 увеличиваются, когда величины ширины воспринимающих рисунков 120 и 140 увеличиваются или когда расстояние между поверхностями исходных материалов 51 и 52 и воспринимающих рисунков 120 и 140 уменьшается, электростатическая емкость увеличивается. Здесь расстояние между поверхностями исходных материалов 51 и 52 и воспринимающими рисунками 120 и 140 уменьшается, когда глубины канавок в виде рисунков 111 и 131 становятся большими.
Когда абсолютное значение емкости увеличивается, величина изменения емкости также увеличивается. Соответственно, для согласования величин изменения емкости в разных видах исходных материалов 51 и 52, имеющих разные диэлектрические проницаемости, величины ширины воспринимающих рисунков 120 и 140, расположенных под разными видами исходных материалов 51 и 52, должны быть отличными друг от друга, или глубины канавок в виде рисунков 111 и 131 должны быть отличными друг от друга.
Предполагая, что диэлектрическая проницаемость первого исходного материала 51 меньше, чем диэлектрическая проницаемость второго исходного материала 52, если величины ширины первых воспринимающих рисунков 120a и 120b, расположенных под первым исходным материалом 51 и вторым исходным материалом 52, выполнены одинаковыми, и расстояния от первых воспринимающих рисунков 120a и 120b до первого исходного материала 51 или второго исходного материала 52 выполнены одинаковыми, то величина изменения емкости первого исходного материала 51 меньше, чем величина изменения емкости второго исходного материала 52. В результате чувствительность к касанию в первом исходном материале 51 и чувствительность к касанию во втором исходном материале 52 отличны друг от друга.
В этом варианте осуществления настоящего раскрытия ширина первых воспринимающих рисунков 120а, обеспеченных под первым исходным материалом 51, задана большей, чем ширина вторых воспринимающих рисунков 120b, обеспеченных ниже второго исходного материала 52, и, таким образом, изменение в электростатической емкости, генерируемое в первом исходном материале 51, может быть выполнено равным изменению в электростатической емкости, генерируемому во втором исходном материале 52.
Альтернативно, глубину канавок в виде первого рисунка 111а, обеспеченных ниже первого исходного материала 51, задают большей, чем глубина канавок в виде первого рисунка 111b, обеспеченных ниже второго исходного материала 52, и, таким образом, изменение в электростатической емкости, генерируемое в первом исходном материале 51, может быть выполнено равным изменению в электростатической емкости, генерируемому во втором исходном материале 52. Это связано с тем, что расстояние между первыми воспринимающими рисунками 120 и 120b и средством ввода уменьшается, когда глубина канавок в виде первого рисунка 111а и 111b увеличивается.
Хотя граница 53 между первым исходным материалом 51 и вторым исходным материалом 52 обеспечена в ступенчатой форме вместо линии в направлении вертикального поперечного сечения на чертеже, формы первых воспринимающих рисунков 120a и 120b не изменяются с учетом величины изменения емкости на границе 53. Это связано с тем, что ширина границы 53, где первый исходный материал 51 и второй исходный материал 52 перекрываются, не сильно отличается от интервала между смежными первыми воспринимающими рисунками 120.
Однако, если ширина границы 53, где первый исходный материал 51 и второй исходный материал 52 перекрываются, больше, чем эталонная ширина смежных первых воспринимающих рисунков 120, то изменение диэлектрической проницаемости на границе 53 должно быть учтено. Таким образом, поскольку диэлектрическая проницаемость на границе 53, где перекрываются первый исходный материал 51 и второй исходный материал 52, находится примерно посередине между диэлектрической проницаемостью первого исходного материала 51 и диэлектрической проницаемостью второго исходного материала 52, ширина первых воспринимающих рисунков 120 под границей 53 может быть обеспечена находящейся примерно посередине между шириной первых воспринимающих рисунков 120а под первым исходным материалом 51 и шириной первых воспринимающих рисунков 120b под вторым исходным материалом 52. Или глубина канавок в виде первого рисунка 111 под областью границы 53 может быть обеспечена находящейся примерно посередине между глубиной канавок в виде первого рисунка 111а под первым исходным материалом 51 и глубиной канавок в виде первого рисунка 111b под вторым исходным материалом 52.
Фиг. 17-24 схематично показывают способ изготовления сенсорного устройства 100-3 ввода согласно четвертому варианту осуществления настоящего раскрытия.
Фиг. 17 показывает этап приготовления различных видов исходных материалов 51 и 52. Первый исходный материал 51 и второй исходный материал 52 могут быть выполнены из разных материалов. Первый исходный материал 51 и второй исходный материал 52 могут быть соединены вместе некоторым способом соединения или подобным. Здесь граница 53 между первым исходным материалом 51 и вторым исходным материалом 52 может быть ступенчатой в направлении вертикального поперечного сечения для увеличения силы соединения.
Дополнительно, первый исходный материал 51 и второй исходный материал 52 могут иметь одну и ту же толщину. В частности, нижние поверхности первого исходного материала 51 и второго исходного материала 52 могут образовывать одну и ту же поверхность.
Фиг. 18 является видом, показывающим этап укладки первого основания 110. Первое основание 110 может быть нанесено на нижние поверхности первого и второго исходных материалов 51 и 52. Первое основание 110 может содержать комплексное соединение металла. Дополнительно, первое основание 110 может иметь постоянную толщину.
Фиг. 19 является видом, показывающим этап выполнения канавок в виде первого рисунка 111. Канавки в виде первого рисунка 111 могут быть образованы путем облучения лазером. В это время тепло, генерируемое при образовании канавок, разрушает химические связи комплексного соединения металла с преобразованием его в металл и образует металлическую затравку в канавках в виде первых рисунков 111.
Дополнительно, по меньшей мере одна из ширины и глубины канавок в виде первых рисунков 111а и b может быть образована иной в области, расположенной под первым исходным материалом 51, и области, расположенной под вторым исходным материалом 52. Дополнительно, любое из ширины и глубины канавок в виде первого рисунка 111 может быть образовано отлично в области, где первый исходный материал 51 и второй исходный материал 52 перекрываются.
Фиг. 20 является видом, показывающим этап образования первых воспринимающих рисунков 120. Первые воспринимающие рисунки 120 могут быть образованы путем металлизации канавок в виде первого рисунка 111, в которых открыта металлическая затравка. Например, первые воспринимающие рисунки 120 включают в себя медь, нанесенную в канавки в виде первого рисунка 111. Дополнительно, на медное покрытие для предотвращения окисления может быть нанесен никель.
Фиг. 21 показывает этап укладки второго основания, фиг. 22 показывает этап выполнения канавок в виде второго рисунка, и фиг. 23 показывает этап образования вторых воспринимающих рисунков.
Второе основание 130 может быть образовано из комплексного соединения металла путем нанесения на нижнюю поверхность первого основания 110. Дополнительно, второе основание 130 может иметь постоянную толщину.
Описание фиг. 18-20 может быть применено к этапам, показанным на фиг. 21-23, и поэтому избыточное описание будет исключено.
Фиг. 24 является видом, показывающим этап укладки слоя 150 краски. Слой 150 краски может быть нанесен на второе основание 130 для защиты вторых воспринимающих рисунков 140 от внешних ударов или загрязняющих веществ. Слой 150 краски может быть образован стойкой к ультрафиолету краской или стойким к ультрафиолету покрытием, использующими экранирующее ультрафиолет вещество.
Фиг. 25 является видом в поперечном сечении, показывающим сенсорное устройство 100-4 ввода согласно пятому варианту осуществления настоящего раскрытия.
Сенсорное устройство 100-4 ввода согласно пятому варианту осуществления настоящего раскрытия может быть обеспечено на нижней поверхности исходного материала 54, включающего в себя вогнутый участок.
Выше было описано, что исходный материал 54 может иметь различные формы. В случае, когда исходный материал 54 имеет слабую кривизну, существует небольшая вероятность того, что произойдет сбой касания, когда пользователь коснется исходного материала 54. Однако в случае, когда изгиб исходного материала 54 является резким, например, когда имеется вдавленный вогнутый участок 54а, показанный на чертеже, сбой касания может произойти вопреки намерению пользователя.
Здесь случай, при котором происходит сбой касания, означает, что касание распознается как касание другой точки, несмотря на то, что пользователь не касается намеченной точки. Такой сбой может произойти, когда сенсорное устройство 100 ввода допускает непрямой контакт, а также непосредственный контакт, т.е. когда сенсорное устройство 100 ввода имеет функцию зависания.
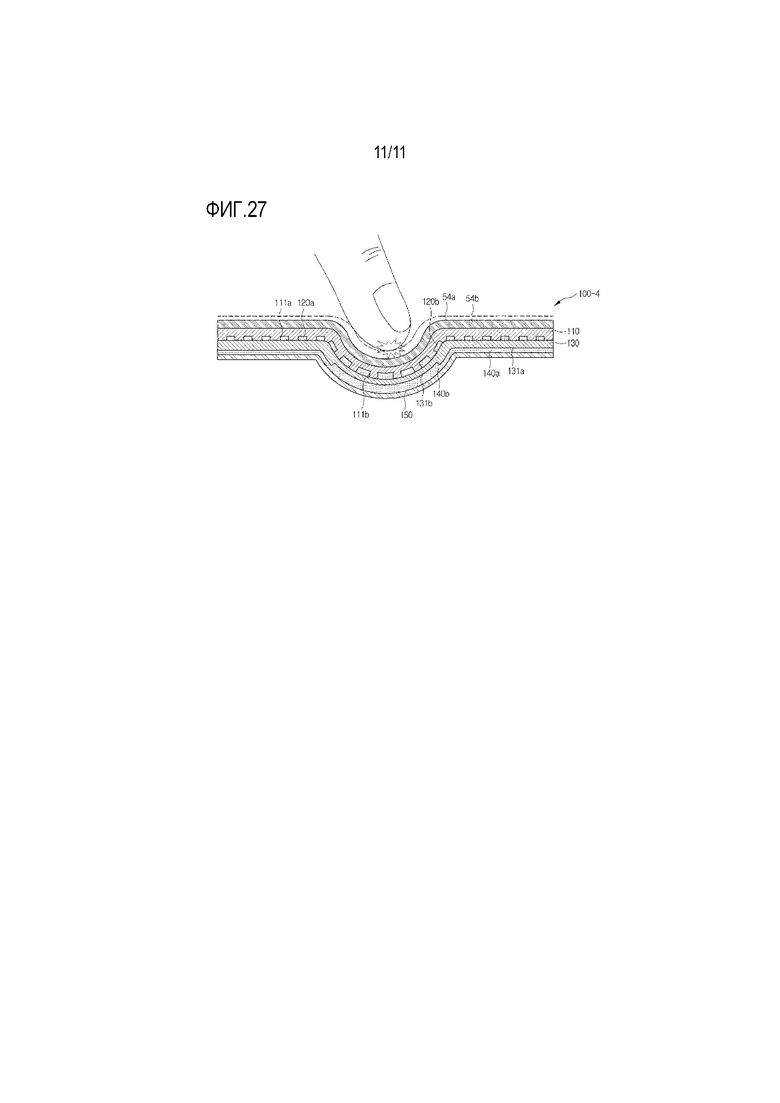
Способ предотвращения сбоя касания сенсорным устройством 100-4 ввода согласно пятому варианту осуществления настоящего раскрытия, показанный на фиг. 27, будет описан посредством сравнительного примера 100-5 по фиг. 26.
Фиг. 26 является видом, показывающим состояние сбоя, когда значения сопротивления воспринимающих рисунков 120 и 140 выполнены равными по кривизне исходного материала 54, и фиг. 27 является видом, показывающим рабочее состояние, когда значения сопротивления выполнены изменяемыми по кривизне исходного материала 54.
Со ссылкой на фиг. 26, в случае, когда формы первых воспринимающих рисунков 120 и вторых воспринимающих рисунков 140 согласованно образованы вдоль криволинейной поверхности исходного материала 54, можно увидеть, что высоты зависания (указанные пунктирной линией на этой фигуре), на которых распознается непрямое касание, согласованно образованы вдоль криволинейной поверхности исходного материала 54.
В случае, когда пользователь намеревается коснуться углубления, которое является самой низкой точкой вогнутого участка 54а исходного материала 54, и подносит палец близко к углублению, если другая часть пальца окажется в пределах высоты зависания, даже если конец пальца не коснется углубления, сенсорное устройство 100-5 ввода может ошибочно распознать, что пользователь прикоснулся к другой области.
Со ссылкой на фиг. 27, для решения такой проблемы сенсорное устройство 100-4 ввода согласно пятому варианту осуществления настоящего раскрытия может изменять сопротивления первых воспринимающих рисунков 120 и вторых воспринимающих рисунков 140 по-разному согласно криволинейной форме исходного материала 54.
Формула для величин сопротивлений воспринимающих рисунков 120 и 140 для определения чувствительности к касанию или высоты зависания в емкостном сенсорном устройстве ввода приведена ниже.
R=ρl/S (R: сопротивление, ρ: удельное сопротивление, l: длина сопротивления, S: площадь поперечного сечения сопротивления).
В вышеприведенной формуле длина сопротивления означает длину воспринимающих рисунков 120 и 140. Однако, длины воспринимающих рисунков 120 и 140 изменяются в зависимости от площади сенсорной поверхности и не могут настраиваться произвольно. Дополнительно, площадь поперечного сечения сопротивления означает площадь вертикального поперечного сечения воспринимающих рисунков 120 и 140. Таким образом, ширина и высота воспринимающих рисунков 120 и 140 могут быть настроены для изменения площади поперечного сечения сопротивления.
Например, можно увидеть, что когда ширина воспринимающих рисунков 120 и 140 увеличивается или когда высота воспринимающих рисунков 120 и 140 увеличивается, сопротивление уменьшается. Дополнительно, если сопротивление воспринимающих рисунков 120 и 140 уменьшается, то высота зависания для распознавания непрямого касания в целом увеличивается. Напротив, когда ширина воспринимающих рисунков 120 и 140 уменьшается или когда высота воспринимающих рисунков 120 и 140 уменьшается, сопротивление увеличивается, и высота зависания для распознавания непрямого касания в целом уменьшается.
Чувствительность распознавания касания в сенсорном устройстве ввода емкостного типа может быть выражена формулой, представляющей постоянную времени в нижеприведенной схеме последовательного подключения конденсатора и сопротивления.
Постоянная времени (тау)=сопротивление (R) * конденсатор (С)
Здесь сопротивление является значением поверхности сенсорного участка, и конденсатор означает величину изменения, вызванного касанием пользователя. Другими словами, если значение сопротивления увеличивается, то время детектирования распознавания касаний увеличивается и чувствительность снижается. Наоборот, если значение сопротивления уменьшается, то распознавание касания может быть детектировано быстро. В настоящем раскрытии для использования вышеупомянутых физических законов значение сопротивления изменяют согласно кривизне, тем самым уменьшая ошибочное распознавание и воспринимая касания с одной и той же эффективностью.
Таким образом, со ссылкой на фиг. 27, на вогнутом участке 54а исходного материала 54 высота зависания увеличивается за счет уменьшения сопротивления воспринимающих рисунков 120 и 140. Таким образом, во время перемещения пальца к точке, намеченной пользователем, палец не попадает в пределы высоты зависания другой точки, а достигает высоты зависания в намеченной точке.
Дополнительно, распознавание касания может быть ускорено за счет уменьшения сопротивления воспринимающих рисунков 120 и 140 на вогнутом участке 54а исходного материала 54. Следовательно, в случае, когда палец достигает высоты зависания намеченной точки после того, как палец попадает в пределы высоты зависания другой точки, в то время как палец перемещается к намеченной точке, распознавание касания задерживается, поскольку чувствительность к касанию является низкой в точке, где сопротивление является высоким, и в результате того, что чувствительность к касанию увеличивается в точке, где сопротивление является низким, распознавание касания может быть выполнено согласно намерению пользователя.
Таким образом, даже в местоположении, где форма исходного материала 54, включающего в себя точки перегиба или подобное, является сложной, возможно воспринимаемое касание.
Фиг. 25-27 показывают, что основания 110 и 130 расположены под исходным материалом 54, но исходный материал 54 может быть исключен в этом варианте осуществления настоящего раскрытия, в отличие от чертежей. Таким образом, одна поверхность оснований 110 и 130 может быть обеспечена в качестве сенсорной поверхности.
Дополнительно, канавки в виде рисунков 111 и 131 могут быть образованы на верхних поверхностях оснований 110 и 130 или на нижних поверхностях оснований 110 и 130. Например, канавки в виде первого рисунка 111 и канавки в виде второго рисунка 131 могут быть образованы на верхних поверхностях первого основания 110 и второго основания 130, соответственно, или канавки в виде первого рисунка 111 и канавки в виде второго рисунка 131 могут быть образованы на нижних поверхностях первого основания 110 и второго основания 130, соответственно.
Канавки в виде первого рисунка 111 и канавки в виде второго рисунка 131 могут быть образованы на разных поверхностях оснований 110 и 130, соответственно. Например, канавки в виде первого рисунка 111 могут быть образованы на верхней поверхности первого основания 110, а канавки в виде второго рисунка 131 могут быть образованы на нижней поверхности второго основания 130, или наоборот.
Хотя первое и второе основания 110 и 130 уложены в двухслойной структуре на фиг. 25-27, первые и вторые воспринимающие рисунки 120 и 140 могут быть образованы на одном основании. Например, первые воспринимающие рисунки 120 могут быть образованы на одной поверхности основания, а вторые воспринимающие рисунки 140 могут быть образованы на другой поверхности основания. Таким образом, первые и вторые воспринимающие структуры 120 и 140 могут иметь двухповерхностную структуру. Первые и вторые воспринимающие рисунки 120 и 140 могут быть образованы на одной и той же поверхности основания, т.е. первые и вторые воспринимающие рисунки 120 и 140 могут иметь одноповерхностную структуру.
В то время как настоящее раскрытие было конкретно показано и описано со ссылкой на его иллюстративные варианты осуществления, следует ясно понимать, что это является только иллюстрацией и примером и не должно считаться ограничением. Соответственно, следует понимать, что истинный объем настоящего раскрытия должен определяться только прилагаемой формулой изобретения.
ОПИСАНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 - сенсорный участок
20 - соединительный участок
30 - межсоединение (проводник)
40 - соединительная площадка
51, 52, 54 - исходный материал
100 - сенсорное устройство ввода
110 - первое основание
111 - канавка в виде первого рисунка
120 - первый воспринимающий рисунок
130 - второе основание
131 - канавка в виде второго рисунка
140 - второй воспринимающий рисунок
150 - слой краски
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ И СПОСОБ ИЗГОТОВЛЕНИЯ ДВЕРИ, УСТАНОВЛЕННОЙ НА УСТРОЙСТВЕ ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2690268C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ И СПОСОБ ИЗГОТОВЛЕНИЯ ДВЕРИ, УСТАНОВЛЕННОЙ НА УСТРОЙСТВЕ ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2693871C1 |
| СПОСОБ И УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ ШРИФТОМ БРАЙЛЯ | 2023 |
|
RU2823222C1 |
| СПОСОБ И АППАРАТ ДЛЯ БЕЗОПАСНОГО СЕНСОРНОГО ВВОДА | 2012 |
|
RU2635224C2 |
| УСТРОЙСТВО МОБИЛЬНОЙ СВЯЗИ, ОБОРУДОВАННОЕ СЕНСОРНЫМ ЭКРАНОМ, И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2402179C2 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ УХОДА ЗА РОТОВОЙ ПОЛОСТЬЮ, ИМЕЮЩЕЕ МНОЖЕСТВО СОСТАВНЫХ ЧАСТЕЙ УСТРОЙСТВА ДЛЯ ЧИСТКИ МЯГКИХ ТКАНЕЙ | 2009 |
|
RU2511480C2 |
| СЕНСОРНОЕ УСТРОЙСТВО | 2009 |
|
RU2519392C2 |
| УСТРОЙСТВО ГИБРИДНОГО СЕНСОРНОГО ЭКРАНА И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2013 |
|
RU2609095C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ МНОЖЕСТВЕННЫМ ВВОДОМ И ЭЛЕКТРОННОЕ УСТРОЙСТВО, ПОДДЕРЖИВАЮЩЕЕ ТО ЖЕ САМОЕ | 2014 |
|
RU2672714C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ОДЕЖДЫ | 2016 |
|
RU2696416C1 |
Группа изобретений относится к устройствам ввода. Технический результат - обеспечение сенсорного устройства ввода, способного выполнять сенсорный ввод без сбоев даже в случае сложной формы устройства. Для этого раскрыто сенсорное устройство ввода, способное вводить сигнал касания, транспортное средство с таким сенсорным устройством ввода и способ изготовления этого сенсорного устройства ввода. Сенсорное устройство ввода содержит: сенсорный участок, включающий в себя вогнутый участок и принимающий сигнал касания пользователя; основание, полностью совмещенное с сенсорным участком или расположенное на нижней стороне сенсорного участка и имеющее канавки в виде рисунков в области, соответствующей сенсорному участку; и воспринимающие рисунки, имеющие проводящий материал и расположенные в канавках в виде рисунков. Воспринимающие рисунки, расположенные на нижней стороне вогнутого участка, имеют меньшее сопротивление, чем сопротивление воспринимающих рисунков, расположенных на внешней стороне вогнутого участка. 3 н. и 9 з.п. ф-лы, 27 ил.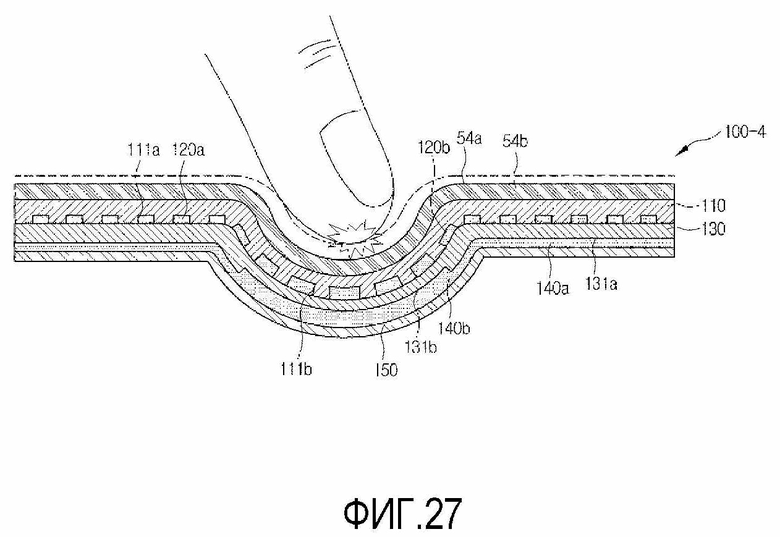
1. Сенсорное устройство ввода, содержащее:
сенсорный участок, имеющий вогнутый участок и выполненный с возможностью принимать сигнал касания пользователя;
основание, полностью совмещенное с сенсорным участком или расположенное на нижней стороне сенсорного участка и имеющее в области, соответствующей сенсорному участку, канавки в виде рисунков; и
воспринимающие рисунки, содержащие проводящий материал и расположенные в канавках в виде рисунков,
причем воспринимающие рисунки, расположенные на нижней стороне вогнутого участка, имеют меньшее сопротивление, чем сопротивление воспринимающих рисунков, расположенных на внешней стороне вогнутого участка,
при этом основание содержит:
первое основание, расположенное на нижней стороне исходного материала; и
второе основание, расположенное на нижней стороне первого основания, и
при этом канавки в виде рисунков и воспринимающие рисунки включают в себя:
канавки в виде первого рисунка и первые воспринимающие рисунки, образованные на одной поверхности первого основания; и
канавки в виде второго рисунка и вторые воспринимающие рисунки, образованные на одной поверхности второго основания.
2. Сенсорное устройство ввода по п. 1, в котором воспринимающие рисунки, расположенные на нижней стороне вогнутого участка, имеют большую ширину вертикального поперечного сечения, чем у воспринимающих рисунков, расположенных на внешней стороне вогнутого участка.
3. Сенсорное устройство ввода по п. 1, в котором основание включает в себя комплексное соединение металла.
4. Сенсорное устройство ввода по п. 1, в котором основание содержит:
смолу, включающую в себя по меньшей мере один из поликарбоната (PC), полиамида (PA) и сополимера акрилонитрила-бутадиена-стирола (ABS); и
оксид металла, включающий в себя по меньшей мере одно из Mg, Cr, Cu, Ba, Fe, Ti и Al.
5. Сенсорное устройство ввода по п. 1, дополнительно содержащее исходный материал, на котором расположен сенсорный участок,
причем основание нанесено на нижнюю поверхность исходного материала.
6. Сенсорное устройство ввода по п. 5, в котором исходный материал является по меньшей мере одним из смолы, стекла и кожи.
7. Способ изготовления сенсорного устройства ввода, содержащий этапы, на которых:
приготавливают исходный материал, содержащий вогнутый участок;
приготавливают основание, содержащее комплексное соединение металла, на нижней стороне исходного материала;
образуют канавки в виде рисунков путем облучения лазером сенсорного участка основания, причем канавки в виде рисунков содержат канавки в виде рисунка в области, в которой расположен вогнутый участок, и канавки в виде рисунка в области на внешней стороне вогнутого участка, которые отличны друг от друга по меньшей мере одной из ширины и глубины; и
образуют воспринимающие рисунки, включающие в себя проводящий материал, в канавках в виде рисунков посредством процесса нанесения покрытия или процесса осаждения,
при этом этап образования канавок в виде рисунков содержит образование канавок в виде первого рисунка и канавок в виде второго рисунка, расположенных отдельно от канавок в виде первого рисунка,
при этом этап образования воспринимающих рисунков содержит образование первых воспринимающих рисунков, наносимых или осаждаемых в канавки в виде первого рисунка, и вторых воспринимающих рисунков, наносимых или осаждаемых в канавки в виде второго рисунка.
8. Способ по п. 7, в котором канавки в виде рисунков имеют по меньшей мере одну из ширины и глубины, большую, чем по меньшей мере одна из ширины и глубины канавок в виде рисунков.
9. Способ по п. 7,
в котором на внутренних поверхностях канавок в виде рисунков на этапе образования канавок в виде рисунков путем облучения лазером на одной поверхности основания открывают металлические затравки, и
в котором проводящий материал прикрепляют к металлическим затравкам при нанесении или осаждении воспринимающих рисунков.
10. Способ по п. 9, дополнительно содержащий определение, могут или нет первые и вторые воспринимающие рисунки быть использованы в качестве датчика, путем подачи тока на первые и вторые воспринимающие рисунки и проверки изменения взаимной емкости между первыми и вторыми воспринимающими рисунками.
11. Транспортное средство, содержащее сенсорное устройство ввода по любому из пп. 1-6.
12. Транспортное средство по п. 11, в котором сенсорное устройство ввода установлено в централизованной системе управления коробкой передач.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СЕНСОРНАЯ ПАНЕЛЬ И СПОСОБ ЕЕ ПРОИЗВОДСТВА | 2009 |
|
RU2506627C2 |

